Análisis de circuitos magnéticos de máquinas eléctricas utilizando el método de los elementos finitos en el Matlab
64
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética. TRABAJO DE DIPLOMA Análisis de circuitos magnéticos de máquinas eléctricas utilizando el método de los elementos finitos en el Matlab Autor: Yasiel Aracelio Fundora García [email protected]. Tutor: M Sc. Arian Ramos Martínez Profesor Asistente, Dpto. de Electroenergética, Facultad de Ingeniería Eléctricas, [email protected]. Consultante: Dr. Diosdado Lorenzo Villegas Villegas Profesor Asistente, Dpto. de Física, Facultad de MFC, [email protected] Santa Clara 2012 "Año 54 de la Revolución".
(3)
(4) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(5) i. TAREA TÉCNICA. 1. Realizar una búsqueda bibliográfica sobre el método de los elementos finitos aplicado al análisis de circuitos magnéticos de máquinas eléctricas rotatorias. 2. Realizar una búsqueda bibliográfica sobre cómo trabajar el método de los elementos finitos en el Matlab. 3. Auto preparación en el Matlab, en especial en la GUI: PDE tool. 4. Determinar las principales potencialidades y deficiencias de la GUI: PDE tool para el análisis de circuitos magnéticos de máquinas eléctricas. 5. Confección de un material, como especie de manual de ayuda, que sirva como guía para quien desee comenzar a trabajar en este aspecto con el Matlab. 6. Realizar el análisis de algunos circuitos magnéticos, primeramente sencillos, y luego de circuitos de máquinas eléctricas. 7. Escritura del informe final del trabajo.. Firma del Autor. Firma del Tutor.
(6) ii. RESUMEN. El análisis de los circuitos magnéticos de las máquinas eléctricas es una de las tareas más complicadas de realizar, lo mismo para el diseño que para el estudio de las máquinas eléctricas rotatorias, debido a la complicada geometría que estos presentan. En este trabajo se realizó un estudio de cómo esta tarea puede ser llevada a cabo utilizando el método de los elementos finitos y tomando como base el sistema de ecuaciones de Maxwell. Todo esto utilizando el programa Matlab, el cual es una herramienta matemática fuerte. Se confeccionó una guía, como especie de manual de ayuda, y se determinaron las principales potencialidades y dificultades de la GUI: PDE tool del Matlab para resolver problemas de análisis de circuitos magnéticos a través del método de los elementos finitos..
(7) iii. TABLA DE CONTENIDOS. TAREA TÉCNICA .................................................................................................................i RESUMEN ........................................................................................................................... ii INTRODUCCIÓN .................................................................................................................1 Organización del informe ................................................................................................3 CAPÍTULO 1.. REVISIÓN BIBLIOGRÁFICA ................................................................5. 1.1. Descripción del método de los elementos finitos .............................................5. 1.2. Ecuaciones de Maxwell ........................................................................................9. 1.2.1. Ley de Biot-Savart........................................................................................10. 1.2.2. Ley de Faraday.............................................................................................12. 1.2.3. Ley de Gauss................................................................................................12. 1.2.4. Primera ecuación de Maxwell ....................................................................13. 1.2.5. Segunda ecuación de Maxwell ..................................................................15. 1.2.6. Tercera ecuación de Maxwell ....................................................................16. 1.2.7. Cuarta ecuación de Maxwell ......................................................................17. 1.3. Ecuaciones básicas para el análisis de problemas magnéticos..................17. 1.4. Cálculo de fuerza y torque .................................................................................20. 1.4.1. Método del tensor de estrés de Maxwell..................................................21. 1.4.2. Método de la co-energía .............................................................................22.
(8) iv 1.4.3 1.5. Teorema de la fuerza de Lorentz ..............................................................23. Circuito magnético de las máquinas eléctricas ..............................................23. 1.5.1. Yugo ...............................................................................................................24. 1.5.2. Devanado del estator ..................................................................................24. 1.5.3. Núcleo del rotor ............................................................................................25. 1.5.4. Imanes permanents .....................................................................................25. 1.6. Conclusiones del capítulo ..................................................................................26. CAPÍTULO 2.. MATERIALES Y MÉTODOS...............................................................27. 2.1. Breve introducción al programa Matlab ...........................................................28. 2.2. Descripción de la interfaz gráfica PDE toolbox del MatLab .........................30. 2.3. Definición de geometrías complicadas ............................................................34. 2.4. Conclusiones del capítulo ..................................................................................41. CAPÍTULO 3.. RESULTADOS Y DISCUSIÓN...........................................................43. 3.1. Dibujo de la geometría del circuito magnético................................................43. 3.2. Condiciones de fronteras ...................................................................................46. 3.3. Conclusiones del capítulo ..................................................................................51. CONCLUSIONES Y RECOMENDACIONES ................................................................52 Conclusiones ..................................................................................................................52 Recomendaciones .........................................................................................................53 BIBLIOGRAFÍA...................................................................................................................54.
(9) INTRODUCCIÓN. 1. INTRODUCCIÓN. El diseño de máquinas eléctricas rotatorias ha ganado mucho auge en los últimos años debido a la introducción, gracias a los avances científico-técnicos, de modernos materiales magnéticos que minimizan las pérdidas y del desarrollo más económico de imanes permanentes. En muchas fábricas de nuestro país se han intentado desarrollar prototipos de motores de inducción y máquinas asincrónicas de imanes permanentes para ser utilizadas en aerogeneradores. En términos de diseño de máquinas eléctricas, uno de los primeros pasos es la confección de un circuito magnético capaz de permitir la circulación por él de la mayor cantidad de líneas de flujo magnético con las menores pérdidas de energía posible. Siendo este aspecto, el estudio del circuito magnético de la máquina eléctrica uno de los más complicados de llevar a cabo debido a la irregular y complicada geometría que estos presentan. Las ecuaciones de Maxwell son una herramienta potente para la obtención de la inducción de campo magnético (B) o la intensidad del campo magnético (H) en cualquier circuito magnético. Pero tienen como inconveniente que, por muy sencillo que sea el circuito a analizar, resolver ese sistema de ecuaciones por métodos analíticos clásicos es prácticamente imposible. El método de los elementos finitos (MEF) es un acercamiento numérico mediante el cual estas ecuaciones diferenciales parciales pueden ser resueltas aproximadamente, no proporciona la solución exacta pero gracias a este método se puede obtener una solución bastante aproximada a la realidad. En la actualidad existen muchos paquetes informáticos especializados en análisis de problemas a través del.
(10) INTRODUCCIÓN. 2. método de los elementos finitos, siendo uno de ellos el Matlab, programa muy usado por los ingenieros eléctricos por su fortaleza matemática y en especial por los profesores y estudiantes de nuestra carrera de Ingeniería Eléctrica. Por estas razones nos planteamos la siguiente situación problémica: ¿Podría resultar el Matlab una herramienta computacional adecuada para ingenieros eléctricos y diseñadores de máquinas eléctricas para el análisis de circuitos magnéticos y en especial para el circuito magnético de las máquinas eléctricas rotatorias? Para dar respuesta a este problema de investigación se lleva a cabo este trabajo de diploma que tiene como objetivo general el siguiente: Investigar en las potencialidades del Matlab para la resolución de sistemas ecuaciones diferenciales parciales a través de la GUI: PDE tool para el análisis de circuitos magnéticos haciendo énfasis en el circuito magnético de las máquinas eléctricas rotatorias. Para cumplir dicho objetivo general se definió un conjunto de objetivos específicos, estos son: 1. Búsqueda, organización y análisis de la información sobre el método de los elementos finitos aplicado al análisis de circuitos magnéticos de máquinas eléctricas rotatorias. 2. Autopreparación en el Matlab, en especial en la GUI: PDE tool. 3. Determinar las principales potencialidades y deficiencias de la GUI: PDE tool para el análisis de circuitos magnéticos de máquinas eléctricas rotatorias. 4. Confección de un material, como especie de manual de ayuda, que sirva como guía para quien desee comenzar a trabajar en este tema con el Matlab. 5. Realizar el análisis de algunos circuitos magnéticos primeramente sencillos y en segundo lugar de circuitos de máquinas eléctricas. 6. Escritura del Trabajo..
(11) INTRODUCCIÓN. 3. En general el trabajo consistió en realizar un estudio profundo del método de los elementos finitos como vía de solución a sistemas de ecuaciones diferenciales parciales y su aplicación, a través de las ecuaciones de Maxwell, al análisis de circuitos magnéticos de máquinas eléctricas y ver que potencialidades brindaba el Matlab como programa informático para este tipo de análisis. Para analizar las temáticas abordadas en este trabajo se consultaron diferentes fuentes documentales lo que posibilitó una mejor comprensión de la temática y con ello un esclarecimiento de la estrategia a seguir. El análisis teórico del método de los elementos finitos y su aplicación al análisis de circuitos magnéticos de máquinas eléctricas se desarrolló tomando como referencia los textos: Permanent Magnet Motor Technology y FEM analysis of synchronous machines. Otros aspectos se toman de diversos artículos y textos que aparecen referenciados en el cuerpo del trabajo. Organización del informe La estructura establecida para este informe de trabajo de diploma consta de tres secciones fundamentales: la introducción, el cuerpo del trabajo y la conclusiva. La sección introductoria abarca la tarea técnica, el resumen y la introducción del trabajo. El cuerpo del trabajo se dividió en tres capítulos que dan respuesta a los objetivos específicos, el capítulo uno aborda los aspectos teóricos fundamentales relacionados con el método de los elementos finitos y como emplear este para el análisis de circuitos magnéticos de máquinas eléctricas haciendo uso de las ecuaciones de Maxwell. En el capítulo dos se brinda una descripción general de cómo trabajar esta temática en el Matlab, dejando un documento que sirve de ayuda a aquellos que quieran utilizar esta herramienta para trabajar con el método de los elementos finitos. El capítulo tres muestra diferentes resultados obtenidos del análisis realizado al circuito magnético de una máquina eléctrica rotatoria..
(12) INTRODUCCIÓN. La. sección. conclusiva. contiene. las. referencias bibliográficas y la bibliografía.. conclusiones,. 4 recomendaciones,. las.
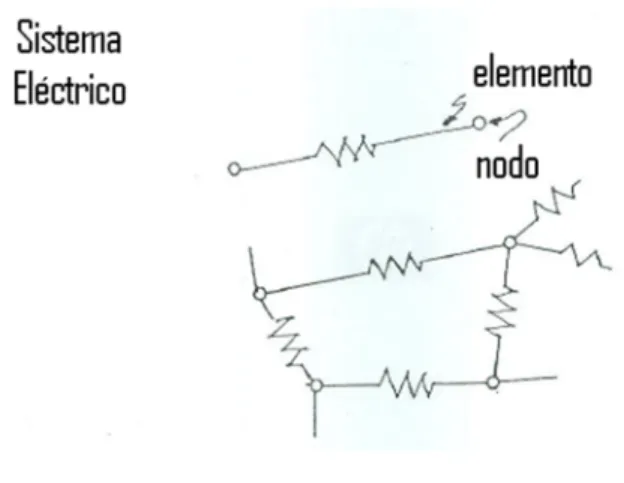
(13) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. CAPÍTULO 1.. 5. REVISIÓN BIBLIOGRÁFICA. Muchos fenómenos físicos en la ciencia y la ingeniería pueden ser descritos en términos de ecuaciones diferenciales parciales. En general, resolver esas ecuaciones mediante métodos analíticos clásicos para formas arbitrarias es casi imposible. El método de los elementos finitos (MEF), finite elements method (FEM), por sus siglas en inglés, es un acercamiento numérico mediante el cual estas ecuaciones diferenciales parciales pueden ser resueltas aproximadamente, no proporciona la solución exacta pero gracias a este método se puede obtener una solución bastante aproximada a la realidad. Lo ideal sería, por supuesto, usar la integración directa, o sea, resolver la ecuación diferencial de una forma exacta pero cuando las geometrías no son simples es muy complejo o imposible hacerlo. Este método es una técnica numérica para resolver geometrías complicadas, cargas, y propiedades de materiales donde los métodos de solución analíticos no pueden ser obtenidos. Las ecuaciones para todo el cuerpo son obtenidas combinando las ecuaciones de equilibrio de cada elemento tal que la continuidad es garantizada en cada nodo. Las condiciones de contorno necesarias son impuestas y las ecuaciones de equilibrio son resueltas para obtener las variables requeridas.. 1.1 Descripción del método de los elementos finitos Muchos sistemas con los que se encuentra el ingeniero en su labor cotidiana, engendran problemas que involucran una serie de parámetros que, por su.
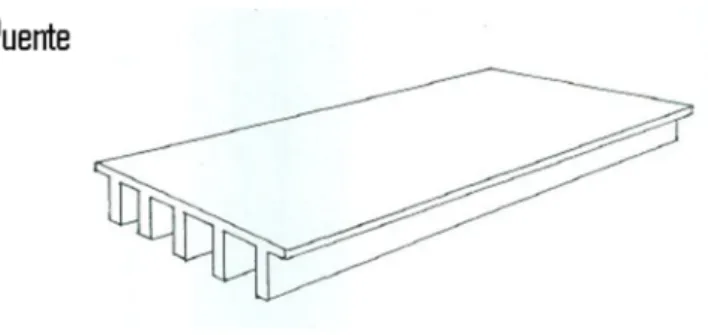
(14) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. complejidad, lo fuerzan a trabajar en base a un modelo matemático equivalente al físico, es decir, que lo defina. Una manera natural de proceder es simplificar el problema, como por ejemplo, subdividiendo el sistema en partes o elementos de estudio más sencillos, para luego volverlo a reconstruirlo ensamblando las porciones y predecir su comportamiento. Hay sistemas en los que tales partes son evidentes, claramente diferenciables, conectadas entre sí por uniones comúnmente llamadas nodos. A tales sistemas se les denomina discretos, figura 1.1. Habitualmente, en estos casos, el modelo matemático se reduce al planteo de un sistema de ecuaciones lineales simultáneas con variables nodales como incógnitas, a partir de cuya solución obtendrá las respuestas a sus interrogantes.. Figura 1.1. Sistema discreto. Sin embargo, en otras ocasiones se enfrenta al inconveniente de analizar sistemas en los que tales partes no son obvias. De intentar una subdivisión ésta puede proseguir en modo indefinido, con lo que el problema sólo podrá expresarse mediante el artificio del infinitésimo, lo cual conduce a un modelo matemático que se manifiesta en ecuaciones diferenciales, generalmente en derivadas parciales, involucrando, por consiguiente, un número infinito de porciones. Sistemas de este tipo reciben el nombre de continuos, figura 1.2. En general, salvo casos muy.
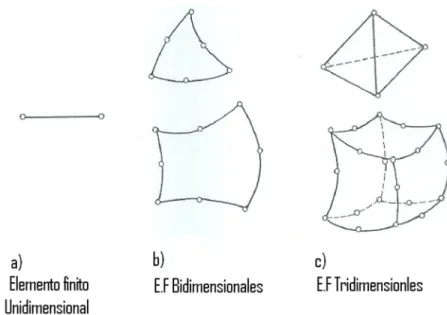
(15) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. simples, la solución analítica o exacta de este tipo de sistema de ecuaciones, sino imposible, es demasiado laboriosa. Ante tales situaciones, el ingeniero debe recurrir a respuestas aproximadas procurando medios que reduzcan su problema de infinitas variables incógnitas, también llamado grados de libertad, a uno de un número finito de grados de libertad, de solución accesible. Esto equivale a pasar del modelo matemático que define al sistema continuo a un modelo discreto o numérico que aproxime su comportamiento. Este tipo de procesos se denominan discretización del problema. Obviamente, en los sistemas discretos el modelo numérico coincidirá exactamente con el modelo matemático.. Figura 1.2. Sistema continuo. Una de las maneras de discretizar sistemas continuos, y que da lugar al método de los elementos finitos, es subdividir el dominio del sistema dado en porciones de estudio, uni, bi o tridimensionales, figura 1.3, según el caso, no intersectantes entre sí, y en modo tal que ensambladas reconstruyan el sistema real. Dichas porciones son llamadas elementos finitos, estando conectadas ente ellas por puntos ubicados en los contornos llamados nodos, lugares estos donde se buscará la solución al problema planteado. Es decir, de las infinitas incógnitas del problema original se ha dado paso a uno de un número limitado de incógnitas que son los grados de libertad o desplazamientos generalizados de los nodos, o sea, ahora las incógnitas serán los nodos solamente y conociendo las coordenadas de cada uno de estos nodos es muy fácil encontrar la variable necesaria. Tales variables. incógnitas. pueden. ser. desplazamientos. propiamente. dichos,.
(16) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. temperaturas, presiones, potencial magnético, etc., en los nodos, según cuál fuese el caso tratado. El comportamiento de otro punto del interior de los elementos estará referido a los nodos a través de funciones adecuadas (funciones de forma), mediante el uso de polinomios interpoladores, que se basan en los valores de las variables en los nodos, se buscan aproximadamente los valores de los puntos dentro del elemento finito que se esté usando. Con ello, el sistema originalmente continuo, habrá quedado discretizado y reducido a un sistema de ecuaciones algebraicas simultaneas, lineales o no lineales.. Figura 1.3. Tipos de elementos finitos. De lo planteado anteriormente, puede entenderse al método de los elementos finitos como un procedimiento general de discretización de los problemas continuos planteados por expresiones definidas [3] o, según lo manifiestan otros autores, el método es una técnica numérica general para la solución de sistemas de ecuaciones diferenciales en derivadas parciales sometidas a condiciones iniciales y de contorno conocidas [3]. El método de los elementos finitos está inevitablemente ligado a la computación. Es evidente que por pocos que sean los elementos con que se haya discretizado.
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. el sistema continuo original, muchos serán los nodos, y por consiguiente el número de incógnitas a develar, al punto tal de convertir prácticamente en inabordable el trabajo en modo manual. Allí nace la necesidad del ordenador electrónico. Con el desarrollo y creciente potencialidad que este ha experimentado en los últimos años, se ha dado paralelamente el desarrollo y difusión de este método en el mundo ingenieril. El método de los elementos finitos es aplicable tanto a problemas lineales como no lineales, sujetos a condiciones de contorno simples o complejas, en régimen permanente o transitorio, a materiales homogéneos o no homogéneos, ventajas estas que difícilmente reúnan otros métodos de aproximación [31]. Merece destacarse que su condición de método aproximado, desde el punto de vista ingenieril lo convierte en tan atractivo como riesgoso. Atractivo por cuanto, cuando quien lo emplea es cuidadoso y experto, pueden lograrse respuestas a los más variados y complejos problemas que no poseen solución analítica. Riesgoso cuando no se toman las debidas precauciones, si quien lo utiliza carece de experiencia previa [31]. Este trabajo está referido al empleo del método de los elementos finitos a los fenómenos electromagnéticos, por cuanto a continuación se tratará solo lo referente a este tema. Las ecuaciones de Maxwell son fundamentales para esta aplicación ya que una de ellas es la que se utiliza para la obtención de la inducción de campo magnético (B) o la intensidad del campo magnético (H) en un área determinada, lo que es a fin de cuentas el objetivo de este trabajo.. 1.2 Ecuaciones de Maxwell Las ecuaciones de Maxwell son un conjunto de cuatro ecuaciones, originalmente 20, que describen por completo los fenómenos electromagnéticos. La gran.
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. contribución de James Clerk Maxwell fue reunir en estas ecuaciones largos años de resultados experimentales, debidos a Coulomb, Gauss, Ampere, Faraday y otros, introduciendo los conceptos de campo y corriente de desplazamiento, y unificando los campos eléctricos y magnéticos en un solo concepto: el campo electromagnético. Las ecuaciones de Maxwell fueron derivadas en 1864-1865 de las tempranas leyes de Biot-Savart, Faraday y Gauss.. 1.2.1 Ley de Biot-Savart. . La ley de Biot-Savart expresa la intensidad del campo magnético diferencial dH 2 en un punto P2, producido por el elemento de corriente. I1dl1 en el punto P1, el. cual presenta un diferencial de longitud y otro de área, tal y como se muestra en la figura 1.4. Esta ley puede descrita en su forma vectorial de la manera siguiente:. I1dl1 lR12 dH 2 4R122. (1.1). Donde:. dH 2 : Vector intensidad de campo magnético en P2 I1: Corriente que circula por el elemento diferencial en longitud y área. ⃗1: Vector longitud de corriente de trayectoria (vector dirección igual que la. corriente convencional) en P1.. 1⃗r12: Vector unitario dirigido desde el elemento de corriente. . de dH 2 , desdeP1 hasta P2.. I1dl1 hasta la locación.
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. . R12: Distancia escalar entre el elemento de corriente I1dl1 hasta la locación de. dH 2 , la distancia entre P1 y P2.. Figura 1.4. Imagen gráfica del vector intensidad de campo magnético producido por el elemento de corriente I1 ⃑ 1 en P1.. ⃑ 2 en P2. La figura 1.4 muestra gráficamente la relación entre las cantidades obtenidas en la ley de Biot-Savart, ecuación 1.1, cuando un elemento de corriente I1 ⃑ 1 es. seleccionado dentro de una superficie cerrada de corriente I1 que circula por un área determinada. La dirección de. ⃑ 2 viene del producto vectorial de ⃑ 1 x ⃑r12 y. por eso es perpendicular a ⃑ 1 y ⃑r12. La dirección de. ⃑ 2 es además gobernada. por la regla de la mano derecha y está en la dirección de los dedos de la mano derecha cuando se agarra el elemento de corriente, entonces el dedo pulgar. apunta en la dirección de ⃑ 1. La ley de Biot-Savart es similar a la ley de Coulomb de la magnetostática..
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. 1.2.2 Ley de Faraday La ley de Faraday dice que un campo magnético variable en el tiempo y el espacio induce una fuerza magnetomotriz (f.e.m.) en una curva cerrada que concatene con este campo, la ley de Faraday puede expresarse en su forma diferencial de la manera siguiente:. e N. d x, t x N dt t x t . (1.2). Donde: N: Número de vueltas del devanado. e: Fuerza electrommotriz instantánea inducida en un devanado con N vueltas. Φ: Flujo magnético promedio (el mismo en cada vuelta del devanado).. 1.2.3 Ley de Gauss La ley de Gauss explica la relación entre el flujo del campo eléctrico y una superficie cerrada. Se define como flujo eléctrico (Φ) a la cantidad de fluido eléctrico que atraviesa una superficie dada. Análogo al flujo de la mecánica de fluidos, este fluido eléctrico no transporta materia, pero ayuda a analizar la cantidad de campo eléctrico ( ⃗ ) que pasa por una superficie. Matemáticamente se expresa de la forma siguiente:. Er dS. (1.3). E d DS dS Qen S. Donde:. E. S. (1.4).
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 13. : Flujo eléctrico total.. ⃑s: Densidad de flujo eléctrico a través de la superficie S.. La formulación matemática obtenida de la ecuación 1.4 es llamada ley de Gauss después de K.F.Gauss. La Qen encerrada por la superficie S, debido a la distribución de densidad de carga del volumen ρv, se convierte en la ecuación 1.6.. DS ds Qen. (1.5). S. Qen vdV V. (1.6). Donde V es el volumen.. 1.2.4 Primera ecuación de Maxwell D Maxwell introdujo la llamada corriente de desplazamiento, cuya densidad es , t donde D es el vector densidad (desplazamiento) de flujo eléctrico. La forma diferencial de la primera ecuación de Maxwell es:. D rotH J rot ( D v ) v divD t. (1.7). O. D H J (D v ) v D t Donde: H: Intensidad de campo magnético.. (1.8).
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. ⃑ : Densidad de corriente eléctrica.. D : Densidad de la corriente de desplazamiento. t rot( ⃑ x. ⃑) : Densidad de la corriente debido al movimiento de un material. dieléctrico polarizado.. v divD : Densidad de la corriente de conducción. Para. ⃑ = 0, tenemos que la ecuación (1.7) puede escribirse de la manera. siguiente:. D rotH J t. (1.9). Apreciándose que debido a la circulación de una corriente y/o un campo de desplazamiento aparece un campo magnético rotacional a esta(os). De acuerdo a la ecuación (1.10), que se muestra a continuación:. A A A A A A (Rot de ⃑) A 1x z y 1y x z 1z y x z x y z x y la ecuación (1.9) tiene la forma escalar siguiente:. D H z H y Jx x t y z. D H x H z Jy y t z x. (1.11). (1.12). (1.10).
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. H y x. . H x D Jz z y t. 15. (1.13). 1.2.5 Segunda ecuación de Maxwell La segunda ecuación de Maxwell en su forma diferencial puede escribirse de la manera siguiente:. B rot B v rotE t. . (1.14). o. B E (B v ) t. (1.15). Para ⃑= 0, la ecuación (1.15) queda de la manera siguiente:. B rotE t. (1.16). La forma escalar de esta última ecuación es:. B E z E y x z t y. (1.17). B y E x E z z x t. (1.18).
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. E y x. . E x B z y t. 16. (1.19). Para cuerpos magnéticamente isotrópicos se tiene que:. B 0 r H. (1.20). Donde: µ0 = 0.4π x 10-6 H/m µ0: Permeabilidad magnética del espacio libre. µr: Permeabilidad magnética relativa. Para materiales ferromagnéticos (hierro, acero, niquel, cobalto) µr >> 1, para materiales paramagnéticos (aluminio) µr > 1, y para materiales diamagnéticos (cobre) µr < 1.. 1.2.6 Tercera ecuación de Maxwell De la ley de Gauss (1.21) para la densidad de carga del volumen ρV y a través del uso del teorema de Gauss (1.23), la tercera ecuación de Maxwell en su forma diferencial es. divD . O. D . (1.21). En su forma escalar. Dx D y Dz x y z. (1.22).
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. Ds dS DdV s. V. 17. (1.23). 1.2.7 Cuarta ecuación de Maxwell La cuarta ecuación de Maxwell, en su forma integral, puede escribirse de la siguiente manera:. B dS 0 s. (1.24). El significado físico de la ecuación es que no hay cargas magnéticas. Mediante el uso del teorema de Gauss (1.23) la cuarta ecuación de Maxwell en su forma diferencial es:. divB 0. O. B 0. (1.25). En la forma escalar. Bx By Bz 0 x y z. (1.26). 1.3 Ecuaciones básicas para el análisis de problemas magnéticos La mayoría de los problemas físicos en sistemas de energía eléctrica pueden ser descritos por fenómenos cuasi-estáticos [35]. Los fenómenos donde ocurren variaciones lentas y hay presencia de campos periódicos cuya frecuencia sobrepasa los 10 kHz son considerados cuasi-estacionarios. Los campos magnéticos creados por los devanados de excitación en las máquinas eléctricas rotatorias son un caso de típico de campos electromagnéticos cuasi-estáticos [8]. La corriente de desplazamiento en los conductores de excitación es despreciable y.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 18. el campo magnético ⃑ fuera del devanado es producido exclusivamente por la densidad de corriente que presentan los conductores. De esta manera las ecuaciones de Maxwell para problemas electromagnéticos en máquinas eléctricas son [35]:. B 0. (1.27). H J. (1.28). B E t. (1.29). Donde: ⃑: Densidad del flujo magnético o inducción magnética.. ⃑ : Intensidad del campo eléctrico.. ⃑ : Intensidad del campo magnético.. J: Densidad de corriente.. Estas magnitudes pueden relacionarse entre sí a través de las ecuaciones siguientes:. J E v B. . . . . B 0 H M. (1.30). (1.31). Donde: σ: Conductividad eléctrica. µ0: Permeabilidad magnética del aire..
(27) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 19. v: Velocidad con respecto a un marco de referencia dado. ⃑ : Vector magnetización.. En la solución de problemas magnéticos, se utiliza con bastante frecuencia el concepto de potencial para facilitar el cálculo del campo electromagnético. Los potenciales usualmente más usados son el vector potencial magnético: ⃑, y el. potencial escalar eléctrico: Φ. Sus relaciones con otras variables del campo son. derivadas de las ecuaciones (1.27) y (1.30) quedando de la manera siguiente:. B A. (1.32). A E t. (1.33). La solución de un problema electromagnético consiste en encontrar la distribución de la intensidad de campo magnético cuando se conoce una fuente de entrada (lo mismo densidad de corriente que voltaje), que satisface todas las ecuaciones mostradas anteriormente [35]. Si se sustituyen las ecuaciones (1.28), (1.32) y (1.33) en (1.30), se obtiene que:. A H v A t . . . (1.34). Entonces sustituyendo (1.31) y (1.32) en el lado izquierdo de (1.34), se tiene que:. . . . 1 A M v A 0. . (1.35). La Laplaciana del vector potencial magnético puede escribirse de la forma siguiente:. . . A A 2 A. (1.36).
(28) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 20. Aplicando la Laplaciana de ⃑ y escogiendo el indicador de Coulomb (∇ ∙ ⃑ = 0), la. ecuación (1.35) puede reescribir como:. A 1 2 A v A M t 0. . . (1.37). Para evitar el término de velocidad en la ecuación (1.37), se usa un sistema de coordenadas Lagrangiano, en el cual las variables son acomodadas de forma tal que la velocidad siempre es cero [35]. Además, asumiendo un análisis en dos dimensiones, el problema puede ser reducido a la forma escalar y el vector potencial magnético ⃑ es reducido a la escala del eje z Az:. . Az 1 2 Az M t 0. (1.38). La ecuación (1.38) es la ecuación general que gobierna el problema. 1.4 Cálculo de fuerza y torque Una de las funciones más importantes que presenta el método de los elementos finitos, para el caso de los problemas electromagnéticos, es su potencialidad en el cálculo de las fuerzas y torques [8]. En el caso específico de las máquinas eléctricas, existen cuatro métodos para calcular las fuerzas y torques: 1. El tensor de estrés de Maxwell. 2. El método de la co-energía, 3. La ecuación de fuerza de Lorentz ( ⃑ x ⃑),. 4. El método de la razón de cambio de energía del campo ( ⃑. ).. Todos estos métodos tienes sus ventajas y desventajas en dependencia del tipo de problema que se esté analizando, aunque los métodos más frecuentemente usados son el tensor de estrés de Maxwell y el de la co-energia..
(29) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 21. 1.4.1 Método del tensor de estrés de Maxwell El uso del tensor de estrés de Maxwell es simple desde una perspectiva computacional, ya que solamente se requiere la distribución de densidad de flujo local a lo largo de una línea específica o un contorno. Usando. la. definición. del. tensor. de. estrés. de. Maxwell,. las. fuerzas. electromagnéticas pueden ser determinadas a partir de la densidad de flujo magnético. La fuerza total poder ser calculada a partir de la ecuación siguiente:. . 1 1 2 F B B n B n dS 2 0 0 . (1.39). la fuerza normal como:. Fn . Li 2 0. B. 2 n. . Bt2 dl. (1.40). y la fuerza tangencial:. Ft . Li Bn Bt dl 0 . (1.41). El torque, en su forma más general, se calcula como fuerza por brazo, para el caso de una máquina eléctrica el brazo sería el radio desde el centro de la máquina hasta el punto medio del entrehierro: ⃑ = ⃑ x ⃑ [8], aplicando esto a la ecuación (1.41) obtenemos el resultado siguiente:. T. Li Bn Bt dl 0 l. (1.42).
(30) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 22. Debido a que la triangulación desarrollada en el método de los elementos finitos es muy pequeña, la ecuación (1.42) puede ser reescrita para un elemento diferencial de corriente i de la forma siguiente:. L T i 0. i1. r 2. i. i. Bri Bi d. (1.43). El torque de la ecuación (1.43) está expresado en coordenadas cilíndricas y es una suma de torques para cada elemento i. La precisión de este método es notablemente dependiente del modelo discretizado y de la selección de la línea o contorno de integración. La línea de integración del tensor de estrés de Maxwell necesita una solución precisa en el entrehierro, exigiendo una discretización fina del modelo en el entrehierro ya que la densidad de flujo no es continua en los nodos y a través de los contornos de los elementos de primer orden. 1.4.2 Método de la co-energía En este método las fuerzas o torques se calculan como la derivada de la coenergia almacenada en el circuito magnético (W’) con respecto a un pequeño desplazamiento.. dW ' W ' Fs ds s. (1.44). El torque instantáneo para un pequeño desplazamiento de rotación angular θ (ángulo mecánico) puede calcularse de la manera siguiente:. dW ' W ' T d . (1.45).
(31) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 23. El torque instantáneo puede también ser expresado en la forma siguiente:. W ' i, T . i const. . W , . const (1.46). Donde W: Energía magnética almacenada. Ψ: Vector concatenaciones de flujo. 1.4.3 Teorema de la fuerza de Lorentz En el teorema de la fuerza de Lorentz, el torque instantáneo es expresado como una función de la fuerza electromotriz de fase y la corriente de fase y se expresa de la manera siguiente:. 2 m1 p T il t 2 pN rLi B , t d 2 m1 p l A , B ,C. 1 e A t i A t eB t iB t eC t iC t . (1.47). 1.5 Circuito magnético de las máquinas eléctricas En diferentes partes de la máquina, debido a las diferencias estructurales y materiales utilizados, la ecuación general (1.39) que gobierno el comportamiento del campo electromagnético tendrá diferentes formas. A continuación se detallará las características de las principales partes de una máquina eléctrica rotatoria y se definirá la forma que obtiene la ecuación general que gobierna el comportamiento del campo electromagnético..
(32) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 24. 1.5.1 Yugo En el diseño de máquinas eléctricas, para reducir la circulación de corrientes parasitas, el yugo se construye generalmente laminado [35]. En este caso se asume que la conductividad del yugo es cero. Para nuestra solución, en vez de usar permeabilidad o reluctancia equivalente, la magnetización de los materiales ferromagnéticos y serán modelados como una densidad de corriente equivalente, la cual es una función de la densidad de flujo magnético, y por la tanto una función del vector potencial magnético. De esta manera la ecuación general del comportamiento de campo electromagnético en el yugo de la máquina tiene la forma siguiente:. 1 2 Az M J m Az 0. (1.48). Donde: Jm: Densidad de corriente de magnetización equivalente. 1.5.2 Devanado del estator Para el caso del devanado del estator, asumiremos que el flujo de corriente por el devanado del estator es debido solamente a una fuente externa. Como no tendremos en cuanta el efecto pelicular en el devanado, asumiremos que la densidad de corriente en el devanado no varía con respecto al campo magnético. De esta manera la ecuación general que gobierna el comportamiento del campo electromagnético para el caso específico del devanado del estator puede ser escrita de la manera siguiente:. . 1 2 Az J s 0. (1.49).
(33) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 25. 1.5.3 Núcleo del rotor Por el núcleo de rotor de la máquina solo circulan las corrientes parásitas. La magnitud de estas corrientes parásitas, a diferencia del núcleo del estator de la máquina, son pequeñas, debido a que las variaciones de flujo que concatenan con el núcleo del rotor, en una máquina de tamaño normal, son pequeña, es por esto, que generalmente, el núcleo de rotor no es laminado. Si el núcleo del rotor no está laminado, en el circuito magnético no existirán impedimentos, o al menos muy pocos, para la circulación de las corrientes parásitas y por tanto, el gradiente escalar del potencial eléctrico será cero. Entonces la ecuación general que gobierna el comportamiento del campo electromagnético, para el caso del núcleo del rotor, puede escribirse de la manera siguiente:. Az 1 2 Az M t 0. (1.50). 1.5.4 Imanes permanents Al igual que sucede en el núcleo del rotor de la máquina, la corriente que circula, por los imanes permanentes son las corrientes parásitas. Estos imanes se aíslan eléctricamente unos de otros y del núcleo del estator. De esta forma las corrientes parásitas encuentran una alta impedancia al final de circuito que representa cada imán. Esto trae consigo que ocurra una acumulación de carga en la superficie de los imanes y se cree a través de ellos un potencial eléctrico [referencia]. La ecuación general que gobierna el comportamiento del campo electromagnético, para el caso de los imanes permanentes, puede escribirse de la manera siguiente:. Az 1 2 Az M t 0. (1.51).
(34) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 26. 1.6 Conclusiones del capítulo 1. El método de los elementos finitos es ampliamente usado para la solución de sistemas de ecuaciones diferenciales parciales donde los métodos analíticos no aportan soluciones reales. 2. El método de los elementos finitos no es más que un procedimiento general de discretización de los problemas continuos planteados por expresiones definidas matemáticamente. 3. El método es una técnica numérica general para la solución de sistemas de ecuaciones diferenciales en derivadas parciales sometidas a condiciones iniciales y de contorno conocidas. 4. Gracias al desarrollo y creciente potencialidad que ha experimentado en los últimos años el desarrollo de la informática y los ordenadores, se ha dado paralelamente el desarrollo y difusión de este método en el mundo ingenieril. 5. El método de los elementos finitos es aplicable tanto a problemas lineales como no lineales, sujetos a condiciones de contorno simples o complejas, en régimen. permanente. o. transitorio,. a. materiales. homogéneos. o. no. homogéneos, ventajas estas que difícilmente reúnan otros métodos de aproximación. 6. Las ecuaciones de Maxwell son fundamentales para la obtención de la inducción de campo magnético (B) o la intensidad del campo magnético (H) en un área determinada.
(35) CAPÍTULO 2. MATERIALES Y METODOS. CAPÍTULO 2.. 27. MATERIALES Y MÉTODOS. Los cálculos necesarios para el trabajo con el método de los elementos finitos para la resolución de cualquier problema, por muy sencillo que este sea, es extremadamente complicado para resolverlo a mano, por lo que estos problemas se resuelven a través de paquetes informáticos. Los programas informáticos actuales para la solución de problemas con el método de los elementos finitos presentan 3 etapas básicas: pre-proceso (pre-processor), solucionar (solve or processor) y post-proceso (post-processor). Los paquetes de programas más utilizados para la solución de problemas electromagnéticos son los siguientes: 1. Maxwell, de la compañía Ansoft, 2. MagNet, de la compañía Infolytica, 3. Flux, de la compañía Magsoft y 4. Opera. Todos. estos paquetes. informáticos. solucionan problemas. electrostáticos,. magnetostáticos y de corrientes parásitas en dos y tres dimensiones. El Matlab también brinda la posibilidad de solucionar problemas utilizando el método de los elementos finitos con una de sus aplicaciones. Por el gran uso que tiene este programa entre los ingenieros eléctricos, y en especial dentro de nuestra carrera se realiza este trabajo..
(36) CAPÍTULO 2. MATERIALES Y METODOS. 28. 2.1 Breve introducción al programa Matlab El nombre de MATLAB proviene de la contracción de los términos MATrix LABoratory Es un entorno de computación y desarrollo de aplicaciones totalmente integrado orientado para llevar a cabo proyectos en donde se encuentren implicados elevados cálculos matemáticos y la visualización gráfica de los mismos. MATLAB integra análisis numérico, cálculo matricial, proceso de señal y visualización gráfica en un entorno completo donde los problemas y sus soluciones. son. expresados. del. mismo. modo. en. que. se. escribirían. tradicionalmente, sin necesidad de hacer uso de la programación tradicional. En los medios universitarios MATLAB se ha convertido en una herramienta básica, tanto para los profesionales, investigadores y estudiantes de centros docentes, como una importante herramienta para el dictado de cursos universitarios. En el mundo industrial MATLAB está siendo utilizado como herramienta de investigación para la resolución de complejos problemas planteados en la realización y aplicación de modelos matemáticos en ingeniería. MATLAB es la disponibilidad de los toolboxes especializados. Estos son paquetes especializados, orientados a ingenieros, científicos y otros tipos de profesionales técnicos. Para este trabajo se utilizó el paquete PDE. Usando las ecuaciones de Maxwell y reglas matemáticas se realiza un análisis para determinar la ecuación diferencial que gobierna el campo magnético en las maquinas eléctricas. Las ecuaciones (3.1) y (3.2) son ecuaciones de Maxwell, la ecuación (3.3) muestra la relación entre la inducción magnética(B) y la intensidad de campo magnético(H) y la ecuación (3.4) muestra le relación entre el vector inducción magnética y el vector buscar (A). A continuación se muestra este desarrollo matemático:. H J. (3.1).
(37) CAPÍTULO 2. MATERIALES Y METODOS. B 0. 29. (3.2). B H. (3.3). B A. (3.4). En la ecuación (3.4) se aplica el rotacional en ambos miembros de la ecuación quedando de la forma siguiente:. B A. (3.5). Usando la identidad matemática siguiente. F F 2 F. (3.6). La ecuacion (3.5) queda de la siguiente forma:. B A 2 A Si. A 0. (3.8). Entonces. 2 B A. (3.9). De la ecuación (3.3) queda. (3.7).
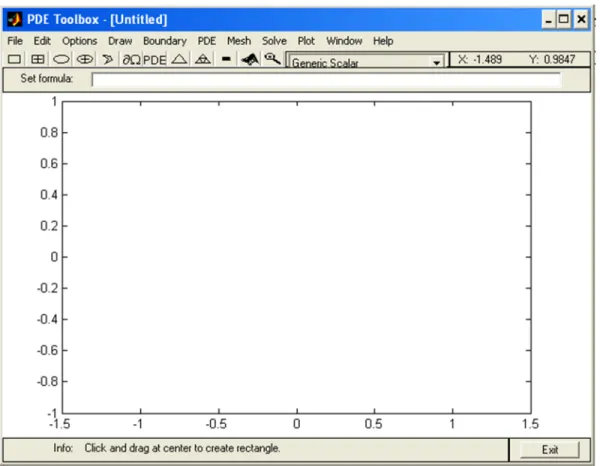
(38) CAPÍTULO 2. MATERIALES Y METODOS. 2 A B H. 30. (3.10). Luego de (1.1) queda finalmente. A J c 2. (3.11). La cuál es la ecuación que se utiliza para calcular el campo magnético en un área determinada. En esta ecuación se asumió que la permeabilidad magnética es constante, de no ser así este valor dependería de la posición en el área, quedando de la siguiente manera:. 1 A J c . (3.12). Esta última ecuación es la que utiliza el programa Matlab para calcular el campo magnético en un área determinada. 2.2 Descripción de la interfaz gráfica PDE toolbox del MatLab La “PDE toolbox” de Matlab incluye una interfaz gráfica de usuario (GUI) completa, que cubre todos los aspectos del proceso de solución de una ecuación en derivadas parciales (EDP). La interfaz puede inicializarse escribiendo Pdetool en la línea de comandos del Matlab o buscándola en el botón de inicio…, siempre y cuando este toolbox se encuentre instalado dentro de las herramientas del programa. La figura 2.1 muestra el aspecto que presenta la pdetool GUI nada más ser inicializada. El uso de la misma es muy sencillo..
(39) CAPÍTULO 2. MATERIALES Y METODOS. 31. Figura 2.1. Interfaz gráfica pdetool. Esta aplicación tiene un menú principal, al igual que todas las aplicaciones de Windows colocado en la parte superior de la aplicación, éste consta de 11 menús desplegables los cuales pueden ser apreciados en la parte superior de la figura 2.1. La funcionalidad de cada uno de ellos se describirá brevemente a continuación: . Menú File. Como es habitual desde este menú pueden abrirse y salvarse ficheros .m que contienen los modelos en ecuaciones en derivadas parciales en los que se esté trabajando. También pueden imprimirse las gráficas activas en ese momento y salir de la interfaz.. . Menú Edit. Capacidades de edición habituales: copiar, cortar, borrar y pegar objetos, así como opciones de seleccionar todo..
(40) CAPÍTULO 2. MATERIALES Y METODOS. . 32. Menú Options. Contiene opciones como cambiar el rango y espaciado de los ejes, obligar a que en la fase de dibujo las formas se anclen a los puntos de la rejilla, zoom, etc.. . Menú Draw. Desde este menú se pueden seleccionar los objetos sólidos básicos como círculos o polígonos que se emplearán en la definición de la geometría, y a continuación dibujarlos en el área de trabajo mediante el uso del ratón. Se recomienda el uso de la barra de herramientas para este fin.. . Menú Boundary. Desde este menú se accede al cuadro de diálogo donde se definen las condiciones de frontera. Adicionalmente se pueden poner etiquetas a los bordes y a los subdominios, borrar bordes entre subdominios y exportar la geometría descompuesta y las condiciones de frontera al espacio de trabajo de Matlab.. . Menú Mesh. Desde este menú se crea y se modifica la malla triangular. Puede inicializarse la malla, refinarla, reorganizarla, deshacer cambios previos en la malla, etiquetar los nodos y los triángulos, visualizar la calidad dela malla y exportar la misma al espacio de trabajo.. . Menú Solve. Para resolver la EDP. También abre un cuadro de diálogo donde pueden ajustarse los parámetros involucrados en la resolución, y exportar la solución al espacio de trabajo.. . Menú Plot. Desde este menú se puede dibujar correctamente la solución a la EDP. Un cuadro de diálogo permite seleccionar que propiedad va a visualizarse, en qué estilo y otros tipos de parámetros. Si se ha generado una animación en tiempo de la solución, también puede exportarse al espacio de trabajo.. . Menú Window. Básicamente para seleccionar cuál de las ventanas de figuras de Matlab es la activa entre las abiertas en ese momento.. . Menú Help. Breve ayuda sobre ciertos comandos y funcionalidades.. La aplicación cuenta también con una barra de herramientas, la cual se nuestra en la figura 2.2, colocada debajo del menú principal en la parte superior de la.
(41) CAPÍTULO 2. MATERIALES Y METODOS. 33. interfaz gráfica. Contiene botones con iconos que proporcionan un acceso fácil y rápido a algunas de las funcionalidades más importantes de la aplicación.. Figura 2.2. Barra de herramientas de la pdetool. Los primeros cinco botones de la barra de menú, yendo de izquierda a derecha, son los del modo de dibujo. El modo dibujo se utiliza para dibujar el circuito magnético, o de forma general, la figura que se quiera analizar con la ayuda del método de los elementos finitos. A continuación se nombrarán las funciones de los botones de arriba comenzando de izquierda a derecha: 1ero: Dibuja un rectángulo/ cuadrado comenzando en una esquina. 2do: Dibuja un rectángulo/ cuadrado comenzando en el centro. 3ro: Dibuja una elipse/ círculo comenzando en el perímetro. 4to: Dibuja una elipse/ círculo comenzando en el centro. 5to: Dibuja un polígono. Se pincha y arrastra para crear los lados del polígono. El polígono puede cerrarse haciendo click con el botón derecho del ratón o pinchando sobre el vértice inicial. 6to: Entra en el modo para especificar condiciones de frontera. 7mo: Abre el cuadro de diálogo para especificar la EDP a resolver. 8vo: Inicializa la malla. 9no: Refina la malla..
(42) CAPÍTULO 2. MATERIALES Y METODOS. 34. 10mo: Resuelve la EDP. 11no: Abre el cuadro de diálogo para representar los resultados. 12mo: Zoom on/off. Como en un gran numero de programas informáticos, solo puede haber uno de estos botones de dibujo activado en cada momento. El hacer doble-click sobre uno de ellos fija esa herramienta como activa, pudiendo seguir dibujando objetos del mismo tipo hasta que vuelva a pulsarse el botón. Usando el botón derecho del ratón, o bien Control + click, se restringen las herramientas a dibujar cuadrados o círculos en vez de rectángulos o elipses. 2.3 Definición de geometrías complicadas Las geometrías complicadas, como por ejemplo el circuito magnético de una máquina eléctrica, pueden generarse a partir de dibujar objetos sólidos básicos como rectángulos, cuadrados, elipses, círculos y polígonos que se solapen, parcial o totalmente. La interfaz gráfica asigna automáticamente un nombre a cada objeto sólido que se cree: R1, R2,…, Rn para los rectángulos; SQ1, SQ2,…, SQn para cuadrados; E1, E2,…, En para las elipses; C1, C2,…, Cn en el caso de los círculos y P1, P2,…, Pn para nombrar los polígonos. Obviamente, estos nombres pueden ser modificados por el usuario haciendo doble-click sobre los mismos, lo que abre el cuadro de diálogo de las propiedades del objeto, figura 2.3. Este cuadro de diálogo también nos posibilita el modificar otras características de la forma básica, como la posición de su centro, dimensiones, etc..
(43) CAPÍTULO 2. MATERIALES Y METODOS. 35. Figura 2.3. Propiedades del objeto seleccionado. Una vez que los objetos han sido dibujados, la geometría final se crea mediante la introducción, en la línea situada debajo de la barra de herramientas, de una fórmula que emplee operaciones del álgebra de conjuntos, +, * y – figura 2.4. De todos ellos, el operador de mayor precedencia es el operador diferencia, -, mientras que los operadores unión e intersección, + y * respectivamente, poseen igual prioridad. Sin embargo, este orden de precedencia puede controlarse mediante el uso de paréntesis. El modelo geométrico final, al cual el MatLab asigna la letra griega: Ω, es el conjunto de todos los puntos para los cuales la fórmula introducida puede evaluarse como verdadera. El proceso general puede entenderse más fácilmente a partir del ejemplo siguiente:.
(44) CAPÍTULO 2. MATERIALES Y METODOS. 36. Figura 2.4. Indicación de la fórmula que define el área de la figura deseada. Ejemplo 2.1: Creación de una placa rectangular con esquinas redondeadas en el PDE toolbox de MatLab. Para esto, lo primero es iniciar la interfaz gráfica y activa la propiedad snap–to-grid localizada dentro del menú Options. Además, cambiaremos el espaciado a 1.5:0.1:1.5 para el eje x y -1:0.1:1 para el eje y. Seleccionamos el icono para crear rectángulos y usando el ratón dibujamos uno de anchura 2 unidades y altura 1 unidad, comenzando en el punto (-1,0.5). Para crear las esquinas redondeadas añadimos círculos, uno en cada esquina. Los círculos deben tener radio de 0.2 unidades y centros a una distancia de 0.2 unidades de las fronteras del rectángulo localizados en los puntos siguientes: (-.
(45) CAPÍTULO 2. MATERIALES Y METODOS. 37. 0.8,-0.3), (-0.8, 0.3), (0.8,-0.3) y (0.8, 0.3). Para dibujar círculos en vez de elipses, se debe usar el botón derecho del ratón o mantener la tecla Ctrl pulsada mientras se realiza el dibujo. Para finalizar, dibuja en cada una de las esquinas un pequeño cuadrado de lado 0.2 unidades. Los resultados de estas operaciones se muestran en la figura 2.5.. Figura 2.5. Dibujo de la figura. Ahora se debe editar la fórmula que define la geometría. Para conseguir las esquinas redondeadas, se restan los cuadrados pequeños del rectángulo y se suman a continuación los círculos. Esto se logra con la fórmula siguiente: R1 – (SQ1 + SQ2 + SQ3 + SQ4) + C1 + C2 + C3 + C4 Con esta operación se logra dibujar una placa rectangular con esquinas redondeadas, pero esto no es suficiente. Esto se puede comprobar cunando se valla a definir las condiciones de fronteras. Para dejar totalmente listo nuestra geometría presionamos el botón. para entrar en el modo Boundary y ver las. fronteras de la geometría final, figura 2.6. Puede observarse que aun existen dentro de la placa algunas de las fronteras provenientes de los subdominios originales. Si se supone que la placa es homogénea, estas deben de ser borradas. Para ello, se selecciona la opción: Remove All Subdomain Borders del menú.
(46) CAPÍTULO 2. MATERIALES Y METODOS. 38. Boundary para borrar de nuestra figura los bordes de las figuras básicas que dibujamos sobrantes. Ahora el modelo de la placa está completo.. Figura 2.6. Fronteras de la figura dibujada. El flujo básico de acciones al empezar la interfaz gráfica de la toolbox de ecuaciones en derivadas parciales es el indicado de izquierda a derecha por los menús y los botones de la barra de herramientas, trabajando en este sentido a lo largo del proceso de modelado, definición y resolución del problema. La siguiente secuencia de acciones cubre todos los pasos de una sesión normal empleando la pdetool: 1. Usar la pdetool como herramienta de dibujo para realizar el dibujo de la geometría 2-D en la que se quiere resolver la EDP, haciendo uso de los objetos básicos y de la característica de “fijar a rejilla”. Combina los objetos sólidos mediante las fórmulas de álgebra de conjuntos para crear la geometría definitiva. 2. Salvar la geometría a un fichero de modelo (un fichero .m), de manera que se pueda seguir empleándola en futuras sesiones de trabajo. Si se salva el fichero mas adelante a lo largo del proceso de resolución, el fichero del modelo del fichero también incluirá ciertos comandos para recrear las condiciones de frontera, los coeficientes de la EDP y la malla..
(47) CAPÍTULO 2. MATERIALES Y METODOS. 3. Pasar a especificar las condiciones de frontera presionando el botón. 39 ,. luego se da doble clic en cada borde para especificar las condiciones de frontera de cada borde figura 2.7, en el cuadro que se muestra se puede elegir entre la condición de contorno de Neumann y Dirichlet y después de elegido esto se entran los valores que se piden, o sea, los valores deseados para que cumpla con la especificación de contorno requerida. Si las fronteras no son las correctas, se puede volver a editar la geometría volviendo al modo de dibujo (Draw mode). Si durante la definición de la geometría han quedado bordes de subdominios no deseados se pueden borrar mediante las opciones del menú Boundary (“Remove Subdomain Border” o “Remove All Subdomain Borders”). A continuación se pueden fijar las condiciones de cada una de las fronteras haciendo doble-click sobre cada una de ellas.. Figura 2.7. Condiciones de contorno del borde seleccionado. 4. El botón. se usa para especificar la EDP a resolver figura 2.8. En el. caso en el que los coeficientes de la EDP dependan del material, estos son introducidos entrando en el modo PDE y haciendo doble-click en cada uno de los subdominios..
(48) CAPÍTULO 2. MATERIALES Y METODOS. 40. Figura 2.8. Especificación de la EDP a resolver. 5. Se inicializa la malla triangular mediante el botón. . Normalmente, los. parámetros por defecto del algoritmo de generación de la malla producen buenos resultados, aunque en caso necesario pueden modificarse desde la opción “Parameters” del menú Mesh,figura 2.9 .. Figura 2.9. Parámetros de la malla..
(49) CAPÍTULO 2. MATERIALES Y METODOS. 6. Si es necesario, se refina la malla mediante el botón. 41 . En cada. refinamiento, el número de triángulos aumenta en un factor cuatro. Se debe tener presente que cuando más fina sea la malla mayor será el tiempo requerido para calcular la solución. Otra opción es reordenar la triangulación de la malla para mejorar su calidad mediante la opción “Jiggle Mesh” del menú Mesh. 7. Se resuelve la EDP presionando el botón. .. 8. Se visualizan las propiedades de la solución en las que halla interés mediante el botón. , figura 2.10. También se puede exportar la solución. y/o la malla al espacio de trabajo principal de Matlab para un análisis en mayor detalle.. Figura 2.10. Propiedades de la solución. 2.4 Conclusiones del capítulo 1. La GUI: PDE tool es una potente herramienta para la solución de sistemas de ecuaciones en derivadas parciales a través del método de los elementos finitos. 2. Las principales potencialidades de la GUI: PDE tool son las siguientes:.
(50) CAPÍTULO 2. MATERIALES Y METODOS. . 42. Es una herramienta potente para la solución de sistemas de ecuaciones en derivadas parciales.. . Es capaz de dar rápida y efectiva solución a cualquier geometría en dos dimensiones, por complicada que sea, y no solo en aspectos relacionados con el análisis de circuitos mágneticos.. 3. Las principales deficiencias de la GUI: PDE tool son las siguientes: . Las herramientas de dibujo que brinda son ineficientes para la confección de la complicada geometría que puede presentar el circuito magnético de la máquina.. . No permite la importanción de ficheros confeccionados en programas CAD, como por ejemplos el AutoCad, con el cual es mucho más sencillo dibujar la geometría de los circuitos magnéticos.. 4. La GUI: PDE tool es una aplicación general para la solución de sistemas de ecuaciones en derivadas parciales a través del método de los elementos finitos, al no estar especializada en el caso particular del análisis de circuitos magnéticos no brinda una gama de datos y figuras suficiente para un análisis de diseño..
(51) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. CAPÍTULO 3.. 43. RESULTADOS Y DISCUSIÓN. Para comprobar las potencialidades del Matlab, y en especial de la GUI: PDE tool en el análisis de circuitos magnéticos utilizando el método de los elementos finitos con la ayuda de las ecuaciones de Maxwell se tomó un ejemplo sencillo, debido a las limitantes que presenta la aplicación para el dibujo de geometrías complejas, el circuito magnético de una máquina eléctrica rotatoria de dos polos. El dominio consiste en tres regiones: . Dos piezas ferromagnéticas, el estator y el rotor.. . El entrehierro entre el estator y el rotor.. . El devanado de la armadura portando la corriente directa.. Lo que se desea es determinar el campo magnético estático debido a los devanados del estator. 3.1 Dibujo de la geometría del circuito magnético La geometría es compleja, involucrando cinco arcos circulares y dos rectángulos. Luego de escribir pdetool en el promp del Matlab se fijan los límites del eje x a [1.5 1.5] y los del eje y a [-1 1]. El modo de aplicación se fija a Magnetostatics, y se usa un espaciado de malla de 0.1. El modelo es una unión de círculos y rectángulos; la reducción al primer cuadrante es lograda mediante la intersección con un cuadrado. Usando la característica “snap-to-grid” se puede dibujar la geometría usando el mouse, o también se puede hacer introduciendo los siguientes comandos:.
(52) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 44. pdecirc (0,0,1,'C1')̍ pdecirc (0,0,0.8,'C2')̍ pdecirc (0,0,0.6,'C3')̍ pdecirc (0,0,0.5,'C4')̍ pdecirc (0,0,0.4,'C5')̍ pderect ([-0.2 0.2 0.2 0.9],'R1')̍ pderect ([-0.1 0.1 0.2 0.9],'R2')̍ pderect ([0 1 0 1],'SQ1')̍ Después de hecho esto se tendrá un modelo similar al mostrado en la figura 3.1..
(53) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 45. Figura 3.1. Conformación del cuadrante a analizar en el motor. Con la siguiente formula se reduce el modelo al primer cuadrante: (C1 +C2 +C3 +C4 +C5 +R1 +R2) *SQ1 En el modo de contorno es necesario remover varios bordes de subdominios. Usando Shift+click, se seleccionan y remueven los bordes usando la opción Remove Subdomain Borders del menú Boundary hasta que la geometría consista de cuatro subdominios: el estator, el rotor, el devanado y el entrehierro. En el siguiente gráfico, el estator es el subdominio 1, el rotor es el 2, el devanado es el 3 y el entrehierro es el subdominio 4. En la figura 3.2 se muestra lo antes expuesto..
(54) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 46. Figura 3.2. Contornos de los diferentes subdominios de la máquina. 3.2 Condiciones de fronteras La permeabilidad magnética μ es 1 en el aire y en el devanado. En el estator y el rotor μ es definida por la ecuación (3.1). (3.1) μmax=5000, μmin=200, y c=0.05 son valores que podrían representar el acero del circuito magnético..
(55) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 47. La densidad de corriente J es 0 en todas partes excepto en el devanado, donde es uno. La geometría del problema hace que el vector potencial magnético sea simétrico con respecto al eje Y y asimétrico con respecto al eje X, entonces se puede limitar el dominio a x≥0, y≥0 con la condición de contorno de Neumann en el eje X. (3.2) En el eje Y se aplicó la condición de contorno de Dirichlet: A = 0. El campo fuera del motor es omitido, estableciendo así la condición de contorno de Dirichlet A = 0 en los contornos exteriores. Antes de cambiar al modo PDE, se seleccionan los contornos a lo largo del eje x se fija la condición de contorno a Neumann con g=0 y q=0. Ya en el modo PDE, se activan las etiquetas seleccionando la opción Show Subdomain Labels del menú PDE figura 3.3. Luego se da doble click en cada subdominio para definir los parámetros de la ecuación diferencial parcial: . En el devanado μ y J son 1, por lo tanto los valores predefinidos no necesitan ser cambiados.. . En el estator y el rotor μ es no linear y está definida por la ecuación precedente. Se introduce μ como: 5000./(1+0.05*(ux.^2+uy.^2))+200. . En el entrehierro μ es 1, y J es 0..
(56) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 48. Figura 3.3. Modo PDE donde se muestran las etiquetas de los subdominios. Se inicializa la malla, figura 3.4, y se continúa abriendo la caja de diálogos Solve Parameters seleccionando Parameters del menú Solve figura 3.5. Ya que este es un problema no linear, la resolución no linear debe ser invocada chequeando lo siguiente: Use nonlinear solver. Si se quiere se puede ajustar el parámetro de tolerancia. La resolución adaptativa puede ser usada junto con la resolución no linear. Se resuelve entonces la ecuación diferencial y se traza la densidad de flujo magnético B usando flechas y las líneas equipotenciales del potencial magnetostático A usando un contorno de trazado. El trazado muestra claramente, como se esperaba, en la figura 3.6 que el flujo magnético es paralelo a las líneas equipotenciales del potencial magnetostático..
(57) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. Figura 3.4. Mallado del área analizada.. 49.
(58) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. Figura 3.5. Parámetros para la resolución.. 50.
(59) CAPÍTULO 3. RESULTADOS Y DISCUSIÓN. 51. Figura 3.6. Líneas equipotenciales y flujo magnético en un motor de dos polos. 3.3 Conclusiones del capítulo Escriba su texto aquí. La GUI: PDE tool es una aplicación general para la solución de sistemas de ecuaciones en derivadas parciales a gtravés del método de los elementos finitos, al no estar especializada en el caso particular del análisis de circuitos magnéticos no brinda una gama de datos y figuras suficiente para un análisis de diseño..
(60) CONCLUSIONES Y RECOMENDACIONES. 52. CONCLUSIONES Y RECOMENDACIONES. Conclusiones 1 La búsqueda bibliográfica relacionada con el tema del método de los elementos finitos aplicado al análisis de circuitos magnéticos de las máquinas eléctricas resulto de vital ayuda para la comprensión del tema y para su posterior desarrollo, dejándose un resumen de estos en el capítulo uno del trabajo y una serie de libros y artículos cuyos títulos aparecen en la bibliografía. 2 La GUI: PDE tool es una potente herramienta para la solución de sistemas de ecuaciones en derivadas parciales a través del método de los elementos finitos. 3 Las principales potencialidades de la GUI: PDE tool son las siguientes: . Es una herramienta potente para la solución de sistemas de ecuaciones en derivadas parciales.. . Es capaz de dar rápida y efectiva solución a cualquier geometría en dos dimensiones, por complicada que sea, y no solo en aspectos relacionados con el análisis de circuitos mágneticos.. 4 Las principales deficiencias de la GUI: PDE tool son las siguientes: . Las herramientas de dibujo que brinda son ineficientes para la confección de la complicada geometría que puede presentar el circuito magnético de la máquina..
Figure

+7





Documento similar
Se trata en el presente Trabajo Fin de Grado de realizar del modelado de máquinas eléctricas con software de elementos finitos, explorando las posibilidades de hacerlo con software
Un importante resultado de este trabajo es el desarrollo de una biblioteca para la resolución de ecuaciones en derivadas parciales no-lineales por el método de elementos finitos con
Nos slides a seguir, aplicaremos o método direto para uma barra uniaxial em equilíbrio estático, usando elementos unidimensionais... Formulação de Elementos Finitos para
En este trabajo se presenta el análisis estructural realizado mediante el método de elementos finitos a un horno rotatorio de cemento de vía húmeda.. Se escogió este tipo de horno
ecuaciones diferenciales en un problema en forma matri- cial que proporciona el resultado correcto para un núme- ro finito de puntos e interpola posteriormente la solución al resto
Para resolver Ecuaciones diferenciales ordinarias (EDOs) por el m´etodo de los elementos finitos, en donde se utilizan integrales definidas, primero obtendremos tales integrales
Otro método, tal como el método de los elementos finitos (MEF) representa una alternativa para la solución de problemas tanto en pequeñas como en grandes deformaciones para
El método de los elementos finitos, es un procedimiento general para la resolución numérica aproximada de problemas continuos, planteados por expresiones definidas matemáticamente
