ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
UNIDAD ZACATENCO
“DISEÑO DE UNA PRENSA HIDRÁULICA PARA
EXTRAER O INTRODUCIR PERNOS Y BUJES DE
PARTES AUTOMOTRICES MEDIANTE EL ANÁLISIS
MATEMÁTICO Y EL MÉTODO DEL ELEMENTO
FINITO”
T E S I S
PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN
INGENIERÍA MECÁNICA
PRESENTA:
ING. ALEJANDRO ESCAMILLA NAVARRO
DIRIGIDA POR: M. en C. GABRIEL VILLA Y RABASA
DEDICATORIAS
A MI MADRE GEÑA
Porque aunque no estés conmigo
en cuerpo, siempre te llevo en el corazón.
A MI PADRE VICTOR
Por tu incondicional apoyo, gracias a ti
soy lo que soy y seré lo que seré.
A MI ESPOSA GISELA
Porque eres mi compañera, mi fuente de inspiración
y motivación además de apoyo y comprensión en
los momentos difíciles de mi vida siempre con amor.
AL ING. ALFONSO CAMPOS VAZQUEZ
Porque su apoyo es fundamental para
seguir adelante y cumplir mis metas.
A MIS HERMANOS
AGRADECIMIENTOS
Agradezco a la
Sección de Estudios de Posgrado e Investigación Unidad
Profesional Zacatenco del Instituto Politécnico Nacional
por permitirme realizar
mis estudios de posgrado.
Agradezco al
Ing. Alfonso Campos Vázquez
por ser un gran amigo y
compañero, por su infinito apoyo y comprensión.
Agradezco muy en especial al
M. en C. Gabriel Villa y Rabasa
por su apoyo
moral y académico, además de brindarme su amistad sincera.
Agradezco al
Dr. Guillermo Urriolagoitia Calderón
por los conocimientos
adquiridos durante las clases que impartió, así como los comentarios para la mejor
realización de éste trabajo.
Agradezco al
Dr. Luis Héctor Hernández Gómez
por sus siempre acertados
comentarios en los trabajos de investigación y felicitarlo por su gran
profesionalismo además de ser un excelente ser humano.
Agradezco al
M. en C. Ricardo López Martínez
por sus consejos y revisión de
éste trabajo.
Agradezco al
M. en C. Jesús Silva Lomelí, por su valiosa participación en el
desarrollo de éste trabajo.
Agradezco al
M. en C. Abraham Rodríguez Galeotte
(Carrrrnal) amigo y
compañero por su apoyo y amistad brindada.
Agradezco a los compañeros de la sección
Juan Manuel Sandoval, Gabriel
Serrano y Raúl Delgado
por su amistad y apoyo.
CONTENIDO
RESUMEN i
ABSTRACT ii
OBJETIVO iii
JUSTIFICACIÓN iv
ÍNDICE DE FIGURAS v
ÍNDICE DE TABLAS vii
SIMBOLOGÍA viii
INTRODUCCIÓN x
CAPITULO I. ESFUERZO Y DEFORMACIÓN
1.1 Mecánica de materiales. 1
1.2 Método de las secciones. 1
1.3 Definición de esfuerzo. 3
1.4 Tensor esfuerzo 5
1.5 Ecuaciones diferenciales de equilibrio. 9 1.6 Esfuerzo normal máximo en barras cargadas axialmente. 11
1.7 Esfuerzos cortantes. 14
1.8 Análisis de los esfuerzos normales y cortantes. 18
1.9 Deformación unitaria. 19
1.10 La prueba de tensión y la deformación unitaria normal 19 1.11 Esfuerzos principales en problemas bidimensionales. 22 1.12 Esfuerzos cortantes máximos en problemas bidimensionales 24
1.13 Falla de un elemento. 26
1.14 Esfuerzo de diseño (trabajo). 27
1.15 Selección del factor de seguridad. 28
CAPITULO II. PRENSAS
2.1 Prensas. 31
2.2 Tipos de prensas. 32
2.2.1 Prensa inclinada. 35
2.2.2 Prensa de escote. 35
2.2.3 Prensa de puente. 36
2.2.4 Prensa de costados rectos. 36
2.2.5 Prensa de yunque. 38
2.2.6 Prensa de junta articulada. 38
2.2.7 Prensa dobladora 40
2.2.8 Cizallas de escuadrar. 41
2.2.9 Prensa de revçolver. 41
2.2.11 Prensa de transferencia. 43
2.2.12 Máquina de cuatro correderas. 44
2.3 Mecanismos de transmisión para prensas. 46
2.4 Mecanismos de alimentación. 48
2.5 Antecedentes de la prensa a diseñar. 49
2.6 Descripción de la prensa a diseñar. 51
CAPITULO III. EL MÉTODO DEL ELEMENTO FINITO
3.1 Antecedentes históricos del método del elemento finito. 53 3.2 Campo de aplicación del método del elemento finito. 54
3.3 Método del elemento finito. 56
3.4 Fundamentos del método de elemento finito. 59 3.5 Procedimiento del método del elemento finito. 60
3.5.1 Discretización del dominio. 60
3.5.2 Seleccionar las funciones de interpolación. 60 3.5.3 Definir las propiedades de los elementos. 60 3.5.4 Ensamblar las propiedades de los elementos para obtener las ecuaciones del
sistema, considerando las condiciones de frontera del espécimen. 61
3.5.5 Resolver el sistema de ecuaciones. 61
3.5.6 Efectuar cálculos adicionales. 62
3.6 Tipos de elementos en el método de elemento finito. 62
3.6.1 Elemento barra. 62
3.6.2 Elemento placa. 63
3.6.3 Elementos sólidos. 63
3.6.4 Sólidos axisimétricos. 64
3.6.5 Placa plana en flexión. 64
3.6.6 Cascaron axisimétrico. 65
3.6.7 Cascaron curvo. 65
3.7 Formulación de elementos finitos. 68
3.7.1 El método directo. 68
3.7.2 El método variacional. 68
3.7.3 Los métodos de los residuos ponderados. 68
3.8 Elementos isoparamétricos 68
3.9 Ventajas y desventajas del método del elemento finito 69
CAPITULO IV. ANÁLISIS MATEMÁTICO
4.1 Descripción de los elementos a diseñar. 71
4.2 Generalidades acerca de vigas. 71
4.2.1 Tipos de vigas, de cargas y características. 72
4.2.2 Esfuerzo normal en vigas. 73
4.3 Generalidades acerca de elementos a tensión. 74
4.4 Esfuerzo en elementos a tensión. 75
4.6 Áreas netas o efectivas. 76
4.7 Esfuerzo cortante en conexiones. 77
4.8 Generalidades acerca de columnas. 78
4.8.1 Ecuaciones de la AISC para columnas. 80
4.9 Análisis de la carga necesaria. 82
4.10 Análisis de la viga A y B. 83
4.11 Tornillos a Tensión. 85
4.12 Análisis de la columna. 88
4.13 Análisis de la viga D. 90
4.14 Análisis de la viga E. 94
4.15 Tornillos de sujeción. 95
4.16 Perfil “C” sometido a tensión. 96
4.17 Análisis de la viga C. 97
CAPITULO V. ANÁLISIS POR COMPUTADORA
5.1 Elementos analizados con computadora. 98
5.2 Análisis con computadora de la viga A y B. 98 5.3 Análisis con computadora de tornillos a tensión F. 99 5.4 Análisis con computadora de la columna G. 101
5.5 Análisis con computadora de la viga D. 102
5.6 Análisis con computadora de la viga E. 104
5.7 Análisis con computadora de los tornillos H sometidos a cortante doble. 106 5.8 Análisis con computadora del perfil “C” sometido a tensión. 107 5.9 Análisis con computadora del marco de carga de la prensa. 108
REFERENCIAS 110 BIBLIOGRAFÍA 112 CONCLUSIONES 113
TRABAJOS A FUTURO 114
RESUMEN
En el presente trabajo se desarrolla el diseño de una prensa hidráulica para
dar servicio a talleres mecánicos; se hace el diseño mediante la mecánica de
materiales con teorías que se encuentran dentro de los análisis elásticos calculando
cada uno de los elementos que la componen, como son: vigas, columnas, elementos
a corte, elementos a tensión, etc.
Las ecuaciones matemáticas de la mecánica de materiales nos ayudan a
determinar las dimensiones mínimas necesarias para que nuestros elementos
trabajen dentro de ciertas condiciones de operación, obteniendo el
dimensionamiento real del elemento; en algunas ocasiones el dimensionamiento
está restringido por lo que se proponen dimensiones iniciales y en base a ellas se
determinan las reales.
Habiéndose obtenido el dimensionamiento real de cada elemento, para
asegurarnos de que el diseño es correcto se analiza cada componente por métodos
computacionales, en éste caso se utiliza el método del elemento finito, con
aplicación de ANSIS, SOLIDWORK y COSMOS.
Al final comparamos los esfuerzos máximos obtenidos en los métodos
computacionales y los utilizados como esfuerzos de trabajo para el diseño,
asegurándonos que los primeros sean menores que los segundos y así confirmar
que el diseño de la prensa es correcto.
ABSTRACT
In the present work the design of a hydraulic press is developed to give
service to mechanical factories; the design by means of the mechanics becomes of
materials with theories that are within the elastic analyses calculating each one of
the elements that compose it, as they are: beams, columns, elements to cut,
elements to tension, etc.
The mathematical equations of the mechanics of materials help to determine
necessary the minimum dimensions us so that our elements work within certain
conditions of operation, obtaining the real sizing of the element; in some occasions
the sizing is restricted reason why initial dimensions set out and on the basis of
them the real ones are determined.
Having itself obtained the real sizing of each element, in order to assure to us
that the design is correct analyzes each component by computacionales methods, in
this one case the method of the finite element is used, with application of ANSIS,
SOLIDWORK and the COSMOS.
OBJETIVO
JUSTIFICACIÓN
En la gran mayoría de los talleres mecánicos automotrices pequeños se tiene
la necesidad de extraer o introducir bujes, pernos, baleros, etc., en diferentes
elementos. El comprar una prensa de gran capacidad genera un gasto considerable
para esos talleres los cuales se ven afectados económicamente, es decir afectaría la
poca liquidez de dichas microempresas, por lo que a pesar de ser necesario éste
equipo le resulta prohibitivo su adquisición.
Esto lo observé cuando cursaba el nivel medio superior, por lo que construí
una prensa en el primer semestre de licenciatura en la ESIME Azcapotzalco en la
carrera de Ingía. Mecánica. El resultado fue que sí servía pero carecía de un
análisis profundo de elementos; es decir, fue hecha sin un diseño que respaldará el
dimensionamiento, por lo que de ingeniería no tenia nada según el profesor. Por un
tiempo funcionó pero después de un tiempo algunos elementos comenzaron a fallar,
por lo que quedó abandonada.
ÍNDICE DE FIGURAS
FIGURA TÍTULO PÁG
CAPÍTULO I. ESFUERZO Y DEFORMACIÓN.
1.1 Seccionamiento de un cuerpo. 2
1.2 Componentes de la fuerza ∆P. 4
1.3 Estado general de esfuerzo actuando sobre un elemento infinitesimal en el
sistema coordenado inicial. 5
1.4 Estado general de esfuerzo actuando sobre un elemento infinitesimal en el
sistema girado un cierto ángulo. 6
1.5 Elementos de esfuerzo en un plano. 8
1.6 Elemento infinitesimal con esfuerzos y fuerzas de cuerpo. 9 1.7 Miembro con una distribución no uniforme del esfuerzo en la sección a-a. 13 1.8 Condiciones de carga que causan esfuerzos cortantes entre las interfaces de
bloques unidos con pegamento. 16
1.9 Condiciones de carga que causan esfuerzos cortantes y de aplastamiento en
tornillos. 17
1.10 Conexiones remachadas. 18
1.11 Condición de carga que causa un esfuerzo cortante crítico en dos planos de
soldadura de filete. 19
1.12 Máquina universal de pruebas (Cortesía de la MTS System Corporation) 21
1.13 Probeta cilíndrica de pruebas. 22
1.14 Funciones angulares para esfuerzos principales. 25 1.15 Representaciones equivalentes para un esfuerzo cortante puro. 27
CAPÍTULO II. PRENSAS.
2.1 Prensa punzonadora revolver de hierro fundido, 1936. 31 2.2 Prensa inclinable de bastidor con escote de manivela simple con alimentación de
doble rodillo. Capacidad 1MN. 35
2.3 Diseños típicos de bastidores usados en prensas. 36 2.4 Toldo completamente formado con una carrera en una prensa cerrada de
palanca acodillada. 38
2.5 Prensa de junta articulada con bastidor de hierro fundido, capacidad 5.3 MN. 39 2.6 Prensa dobladora controlada por tarjetas. 40 2.7 Pasos del formado de tubo de gran diámetro en prensa. 41 2.8 Prensa revólver de 0.27 MN que usa computadora de control numérico. 42 2.9 Prensa de embutido de doble acción. 43 2.10 Prensa de transferencia con capacidad de 2.2 MN que produce 1600 placas
terminales para arrancar por hora. 44
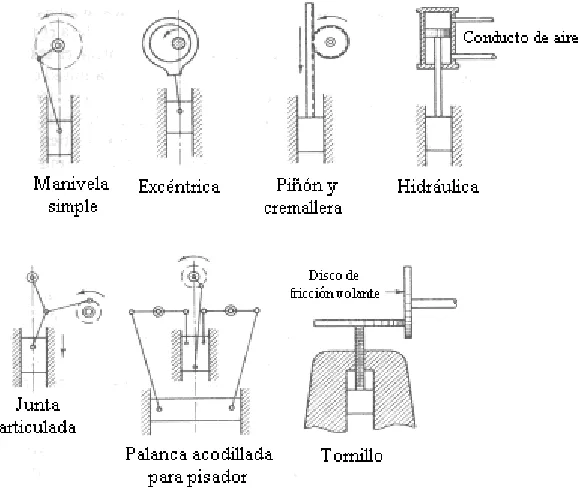
2.11 Secuencia de operaciones en una máquina de cuatro correderas. 45 2.12 Mecanismos de transmisión usados en prensa. 46 2.13 Prensa automática de alta velocidad con corredera de alimentación movida por
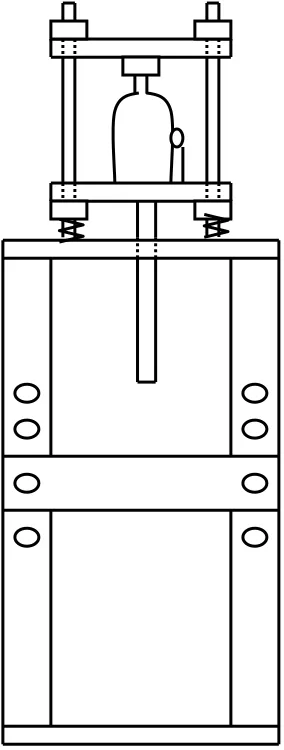
una flecha motriz. Capacidad 0.3 MN. 49 2.14 Parte estructural de la prensa a diseñar. 50
2.16 Esquema simple de la prensa. 52
CAPÍTULO III. EL MÉTODO DEL ELEMENTO FINITO.
3.1 Elemento barra. 62
3.2 Elemento placa en esfuerzo plano. 63
3.3 Elementos sólidos. 63
3.4 Sólido axisimétrico. 64
3.5 Placa plana bajo flexión. 64
3.6 Cascarón axisimétrico. 65
3.7 Cascarón curvo. 65
CAPÍTULO IV. ANÁLISIS MATEMÁTICO.
4.1 Elemento sometido a carga axial. 74
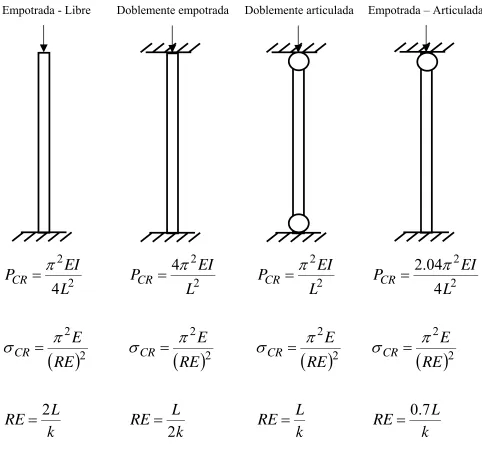
4.2 Cortante simple (a) y cortante doble (b). 78 4.3 Representación y ecuaciones de columnas dependiendo de sus tipos de apoyo. 80 4.4 Diagrama de cuerpo libre y dimensiones de la viga A. 83
4.5 Diagramas V y M de la viga A. 84
4.6 Elemento columna. 88
4.7 Representación de cargas y apoyos en la viga D. 90
4.8 Diagramas V y M de la viga D. 93
4.9 Diagramas V y M de la viga E. 94
4.10 Tornillo de sujeción sometido a fuerza cortante doble. 95
CAPÍTULO V. ANÁLISIS CON COMPUTADORA.
5.1 Esfuerzo en placas A y B. 98
5.2 Deformación en placas A y B. 99
5.3 Esfuerzos en los tornillos a tensión. 99 5.4 Esfuerzos en el apoyo de el tornillo a tensión. 100 5.5 Deformación en el tornillo a tensión. 100 5.6 Esfuerzos que se presentan en columna G. 101 5.7 Esfuerzos en el apoyo de la columna. 101
5.8 Deformación en la columna G. 102
5.9 Esfuerzos en el apoyo de la viga D. 102
5.10 Esfuerzos en la viga D. 103
5.11 Deformación 3D de la viga D. 103
5.12 Deformación 2D de la viga D. 104
5.13 Esfuerzos en los apoyos de la viga E. 104
5.14 Esfuerzos en la viga E. 105
5.15 Deformación en la viga E. 105
5.16 Esfuerzos en tornillos H sometidos a cortante doble. 106
5.17 Deformación en los tornillos H. 106
5.18 Esfuerzos en el perfil “C”. 107
5.19 Esfuerzos concentrados en los barrenos del perfil “C”. 107
5.20 Deformación en el perfil “C”. 108
ÍNDICE DE TABLAS
TABLA TÍTULO PÁG
CAPÍTULO I. ESFUERZO Y DEFORMACIÓN. N/A
CAPÍTULO II. PRENSAS. N/A
CAPÍTULO III. EL MÉTODO DEL ELEMENTO FINITO.
3.1 Variables típicas en un análisis por elemento finito. 55
CAPÍTULO IV. ANÁLISIS MATEMÁTICO.
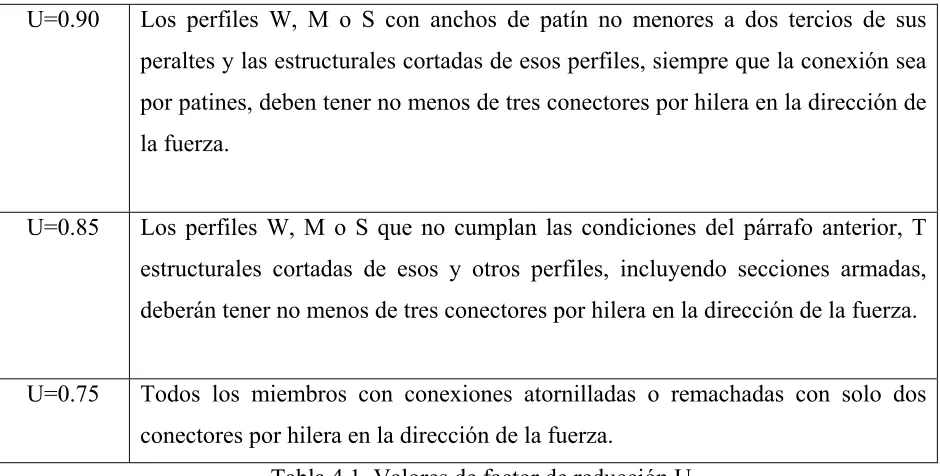
4.1 Valores de factor de reducción U. 77
4.2 Series estándar de roscas de tornillo UN y UNR, pulgadas. 86 4.3 Dimensiones básicas de tuercas hexagonales pesadas, contratuerca hexagonal
pesada, ranurada hexagonal pesada y almendrada pesada, pulgadas. 87
SIMBOLOGÍA
P Carga aplicada a un cuerpo. ∆ Decremento de una cantidad.
A Área transversal.
σ Esfuerzo normal. τ Esfuerzo cortante.
σ1, σ2 y σ3 Esfuerzos principales 1,2 y 3 respectivamente. dx, dy y dz Diferencial de “x”, “y” y “z” respectivamente.
∑ Sumatoria.
N Newton.
Lb Libra.
m Metro. in Pulgada. τmax Esfuerzo cortante máximo
V Fuerza cortante.
τprom Esfuerzo cortante promedio. t , e Espesor.
d Diámetro.
MPa Mega pascales.
Ksi Libas por pulgada cuadrada. Ao Área transversal original. L Longitud. Lo Longitud inicial.
ε Deformación unitaria.
mm Milímetros.
θ Ángulo que define el plano del esfuerzo normal máximo o mínimo. α Ángulo a cual se inclina un plano.
FS Factor de seguridad.
MN Mega Newton.
min Minuto. π Constante igual a 3.1416
E Módulo de elasticidad del material. ν Módulo de Poisson del material. u(x) y v(x) funciones de desplazamiento lineales M Momento. I Momento de inercia.
“y” Distancia del centroide a cualquier punto de la sección transversal. S Módulo de sección.
C Distancia máxima “y” Mmax Momento máximo.
Pcr Carga crítica. RE Relación de esbeltez.
k Radio de giro de la sección transversal. CS Coeficiente de seguridad.
Cc Relación de esbeltez límite. σadm Esfuerzo normal admisible.
σpc Esfuerzo normal en el punto de cedencia. σcr Esfuerzo normal crítico.
In Interferencia. dc Diámetro común.
σe
tmax Esfuerzo tangencial máximo del exterior. σi
tmin Esfuerzo tangencial mínimo del interior.
Pz Presión de zunchado.
de Diámetro exterior. di Diámetro interior.
GPa Giga pascales.
INTRODUCCIÓN
Toda máquina o estructura deberá soportar, transmitir y transformar las fuerzas a que se somete, cuando realizan el trabajo para las cuales fueron concebidas; esto se podrá lograr, si todos sus elementos están diseñados y fabricados apropiadamente.
En la práctica de ingeniería tales condiciones se deben de cumplir con el mínimo gasto de un material dado. A parte del costo, a veces, como en el diseño de satélites la factibilidad y éxito de toda la misión puede depender del peso de una carga. El tema de la mecánica de materiales implica métodos analíticos para determinar la resistencia, la rigidez y la estabilidad de los diversos elementos sometidos a cargas.
De dichos métodos analíticos se deriva por lo tanto el diseño de máquinas o estructuras. El objetivo final del diseño mecánico es producir un dispositivo de utilidad que sea seguro, eficiente y práctico. Cuando se inicia el diseño de una máquina o de un elemento mecánico independiente, es importante definir las funciones y las especificaciones de diseño para el dispositivo por completo, es decir, definir el material a utilizar, las cargas que soporta, la forma de cómo está apoyado, etc.
Al enfocarse en un diseño , el ingeniero debe establecer criterios que servirán de guía en los procesos de toma de decisiones inherentes a cualquier proyecto. Como para cada problema de diseño existen distintas alternativas en relación a su solución, cada una debe evaluarse en función de los criterios que integran la lista. Quizá no exista un mejor diseño, pero los diseñadores deben de trabajar para obtener el que resulte ser óptimo, esto es, el ingeniero del diseño debe maximizar los beneficios y reducir al mínimo las desventajas.
A continuación se muestran los criterios generales en el diseño mecánico o de maquinaria:
• Seguridad. • Rendimiento. • Confiabilidad.
• Facilidad para fabricar.
•
Disponibilidad de servicio o reemplazo de componentes.•
Facilidad en cuanto operación.•
Costo inicial bajo.•
Costos de operación y mantenimiento bajos.•
Tamaño reducido y de poco peso.•
Poco ruido y escasa vibración; que opere con suavidad.•
Uso de materiales accesibles y facilitar la compra de componentes.•
Uso prudente de partes cuyo diseño es único junto con componentes en el mercado.Por lo anteriormente expuesto en el presente trabajo se analiza y diseña los componentes mecánicos y estructurales de una prensa de 5 toneladas, utilizando las teorías y ecuaciones de la resistencia de materiales (mecánica de materiales) validando el diseño por métodos computacionales, en éste caso se utilizó el método del elemento finito. El sofware utilizado para modelar los elementos fue SOLIDWORD y para hacer el análisis de ellos se utilizó el COSMOS y ANSYS, dependiendo de la complejidad del elemento.
Esta tesis cuenta con cinco capítulos. El capitulo I nos Muestra toda la teoría de la resistencia de materiales, desde el concepto de esfuerzo y deformación, hasta esfuerzo principales y cortantes máximo y mínimo, así como una breve explicación del ensayo de tensión simple.
El capitulo II nos da una referencia de los tipos y formas de prensas hidráulicas, sus tipos de mecanismos de transmisión y alimentación, así como una breve descripción de la prensa a diseñar.
El capitulo III muestra la teoría del método de elemento finito, fundamentos, procedimiento, tipos de elementos, formulación, ventajas y desventajas, etc.
El capitulo IV es donde se realiza todo el diseño de los elementos de la prensa mediante las ecuaciones de diseño de la resistencia de materiales, se definen todos los componentes obteniendo las dimensiones mínimas necesarias para la carga que soportan.
El capitulo V se verifican los diseños de los componentes mediante métodos computacionales, asegurando que los esfuerzos máximos presentados en los elementos sean menores a lo esfuerzos de trabajo utilizados en su diseño.
Finalmente es importante destacar que el trabajo que aquí se presenta se encuentra dentro del proyecto de investigación dirigido por:
M en C GABRIEL VILLA Y RABASA
“ANÁLISIS DE ESFUERZOS A TEJIDOS ORGÁNICOS Y ELEMENTOS MECÁNICOS PARA SU PROCESAMIENTO”.
CAPITULO I
ESFUERZO Y DEFORMACION
1.1 Mecánica de materiales.
En toda construcción de ingeniería, a las partes componentes de una estructura o máquina se
deben asignar tamaños físicos definidos. Estas partes deben ser adecuadamente proporcionadas para
resistir las fuerzas reales o probables que puedan llegar a actuar sobre ellas.
El tema de la mecánica de materiales, o de la resistencia de materiales, como ha sido llamado
tradicionalmente, implica métodos analíticos para determinar la resistencia, larigidez y la estabilidad
de los diversos miembros sometidos a carga.
El comportamiento de un miembro sometido a fuerzas depende no sólo de las leyes
fundamentales de la mecánica newtoniana que rigen el equilibrio de las fuerzas, sino también de las
características mecánicas de los materiales de que está hecho el miembro. La información necesaria
relativa a los materiales proviene de los laboratorios, donde los materiales son sometidos a la acción de
fuerzas conocidas con precisión y donde el comportamiento de probetas de ensayo es observado con
particular interés respecto a sus propiedades de ruptura, deformaciones, etc..
1.2 Método de las secciones
Uno de los problemas principales de la mecánica de sólidos es la investigación de la resistencia
interna de un cuerpo; es decir, la naturaleza de las fuerzas que se generan dentro de un cuerpo para
equilibrar el efecto de las fuerzas aplicadas externamente. Para tal fin se emplea un método uniforme
de enfoque. Se prepara un croquis completo del miembro bajo investigación, sobre el cual se muestran
todas las fuerzas externas que actúan sobre él en sus respectivos puntos de aplicación. Tal croquis se
Todas las fuerzas que actúan sobre un cuerpo, incluidas las fuerzas reactivas causadas por los
soportes, así como el peso propio del cuerpo debido a su masa, son consideradas como fuerzas
externas. Además, como un cuerpo estable en reposo está en equilibrio, las fuerzas que actúan sobre él
satisfacen las ecuaciones del equilibrio estático. Entonces, si las fuerzas que actúan sobre un cuerpo
como el mostrado en la figura l.l satisfacen las ecuaciones de equilibrio estático y se muestran todas
actuando en él, el croquis representa un diagrama de cuerpo libre. Luego, como la determinación de las
fuerzas internas causadas por las fuerzas externas es uno de los fines principales de esta ciencia, se pasa
una sección arbitraria por el cuerpo, separándolo completamente en dos partes.
El resultado de tal proceso puede verse en las figura 1.1, donde un plano arbitrario ABCD
[image:21.612.144.513.330.578.2]separa el cuerpo original en dos partes distintas. A este proceso se le llamará método de las secciones.
Entonces, si todo el cuerpo está en equilibrio, cualquier parte de él debe también estar en
equilibrio. Sin embargo, para tales partes de un cuerpo, algunas de las fuerzas necesarias para mantener
el equilibrio deben actuar en la sección cortada. Estas consideraciones conducen a la siguiente
conclusión fundamental: Las fuerzas aplicadas externamente a un lado de un corte arbitrario deben ser
equilibradas por las fuerzas internas desarrolladas en el corte o, brevemente, las fuerzas externas están
equilibradas por las fuerzas internas. Veremos luego que los planos de corte son orientados en
direcciones particulares para satisfacer requisitos especiales. El método de las secciones es el primer
paso en la resolución de todos los problemas en que se investigan fuerzas internas.
1.3 Definición de esfuerzo
En general, las fuerzas internas que actúan sobre áreas infinitesimales de un corte, son de
magnitudes y direcciones variables. En la mecánica de sólidos es particularmente importante
determinar la intensidad de esas fuerzas sobre las diversas porciones de una sección ya que la
resistencia a la deformación y a las fuerzas depende de esa intensidad. En general, tales fuerzas varían
de punto a punto y están inclinadas con respecto al plano de la sección. Es conveniente resolver esas
intensidades perpendicular y paralelamente a la sección investigada. Por ejemplo, las componentes de
un vector fuerza ∆P que actúa sobre un área ∆A se muestran en la figura l.2. En este diagrama particular, la sección por el cuerpo es perpendicular al eje x y las direcciones de
∆Px y de la normal a ∆A coinciden.
Como las componentes de la intensidad de una fuerza por unidad de área, es decir, del esfuerzo,
son ciertas sólo en un punto, la definición matemática del esfuerzo es:
A P A P A P z A xz y A xy x A xx ∆ ∆ = ∆ ∆ = ∆ ∆ = → ∆ → ∆ →
∆
lim
lim
lim
0 0 0 σ ττ (Ecs 1.1)
Donde, en los tres casos, el primer subíndice de o indica que considera el plano
La intensidad de la fuerza perpendicular o normal a la sección se llama esfuerzo normal en un
punto ( ). Es habitual llamar esfuerzos de tensión a los esfuerzos normales que generan tensión sobre
la superficie de una sección. Por otra parte, aquellos que empujan contra ella son esfuerzos de
compresión Las otras componentes de la intensidad de la fuerza actúan paralelamente al plano del área
elemental, esas componentes se llaman esfuerzos cortantes ( ).
∆P
∆PY
∆PZ
[image:23.612.252.360.232.409.2]∆PX
Fig. 1.2 Componentes de la fuerza ∆P .
Entonces los esfuerzos normales resultan de componentes de fuerzas perpendiculares al plano
de corte y los esfuerzos cortantes resultan de las componentes tangenciales al plano de corte.
Debe hacerse énfasis en que los esfuerzos multiplicados por las respectivas áreas sobre las que
ellos actúan dan fuerzas. En una sección imaginaria, una suma vectorial de esas fuerzas, llamada
resultante de esfuerzos, mantiene un cuerpo en equilibrio. En la mecánica de sólidos, las resultantes de
esfuerzos en una sección dada por lo general se determinan primero, y luego, aplicando las fórmulas ya
1.4 Tensor esfuerzo
Si. además de la sección implicada en el cuerpo libre de la figura 1.2, se pasa otro plano por el
cuerpo a una distancia infinitesimal y paralelo al primero, quedará aislada una rebanada elemental.
Entonces, si se pasan otros dos pares de planos normales al primer par, quedará aislado del cuerpo un
cubo de dimensiones infinitesimales. Este cubo se muestra en la figura l.3.
Todos los esfuerzos que actúan sobre él están identificados en el diagrama. Los primeros
subíndices sobre las y asocian el esfuerzo con un plano perpendicular a un eje dado; los segundos
subíndices designan el sentido del esfuerzo. Sobre las caras cercanas del cubo (es decir, sobre las caras
alejadas del origen), los sentidos del esfuerzo son positivos si ellos coinciden con los sentidos positivos
de los ejes. Sobre las caras del cubo hacia el origen, del concepto acción-reacción de equilibrio. los
esfuerzos positivos actúan en sentido opuesto al sentido positivo de los ejes.
Fig. 1.3 Estado general de esfuerzo actuando sobre un elemento infinitesimal en el sistema coordenado
Fig. 1.4. Estado general de esfuerzo actuando sobre un elemento infinitesimal en el sistema
girado un cierto ángulo.
Si en un punto se escoge un conjunto diferente de ejes, los esfuerzos correspondientes son como
se muestran en la figura l.3. Esos esfuerzos están relacionados, pero en general no son iguales a los
mostrados en la figura l.4. El proceso de cambiar esfuerzos de un conjunto de ejes coordenados a otro
se llama transformación de esfuerzos.
El estado de esfuerzo en un punto que puede ser definido por tres componentes sobre cada uno
de los tres ejes mutuamente perpendiculares (ortogonales), se llama en terminología matemática
tensor. Procesos matemáticos precisos se aplican para transformar tensores, incluidos los esfuerzos, de
un conjunto de ejes a otro. Un examen de los símbolos para los esfuerzos en la figura l.3 muestra que
hay tres esfuerzos normales: τxx =σx'τyy =σy'τzz =σz y seis esfuerzos cortantes: τxy'τyxτ' yz'τzyτ' zx'τxz.
En contraste, un vector fuerza P tiene sólo tres componentes: Px Py y Pz. Éstas pueden escribirse de
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
Pz
Py
Px
(Ec 1.2)En forma análoga, las componentes de esfuerzo pueden ordenarse como sigue:
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
z zy zx yz y yx xz xy x zz zy zx yz yy yx xz xy xxσ
τ
τ
τ
σ
τ
τ
τ
σ
τ
τ
τ
τ
τ
τ
τ
τ
τ
(Ec 1.3)Ésta es una representación matricial del tensor esfuerzo. Se trata de un tensor de segundo rango
que requiere dos índices para identificar sus elementos o componentes. Un vector es un tensor de
primer rango y un escalar es un tensor de rango cero. A veces, por brevedad, un tensor esfuerzo se
escribe en notación indexada como ij, donde se entiende que i y j pueden tomar las designaciones x,y y
z.
El tensor de esfuerzos debe ser simétrico es decir ij = ji, esto se infiere directamente de los
requisitos de equilibrio para un elemento. Existe la posibilidad de un cambio infinitesimal en esfuerzo
de una cara del cubo a otra y la posibilidad de la presencia de fuerzas de cuerpo (inerciales). Siempre se
debe cumplir entonces que: xy = yx..
En forma similar, tenemos que: xz = zx y yz = zy Por consiguiente, los subíndices para los
esfuerzos cortantes son conmutativos (es decir, su orden puede intercambiarse) y el tensor esfuerzo es
simétrico.. El hecho de que los subíndices son conmutativos significa que los esfuerzos cortantes sobre
planos mutuamente perpendiculares de un elemento infinitesimal son numéricamente iguales y que
∑Mz = 0 no se satisface por un sólo par de esfuerzos cortantes. Las puntas de las flechas de los esfuerzos cortantes deben encontrarse en esquinas diametralmente opuestas de un elemento para que se
En la mayoría de las situaciones subsecuentes consideradas, más de dos pares de esfuerzos
cortantes rara vez actuarán simultáneamente sobre un elemento. Por consiguiente, los subíndices
usados antes para identificar los planos y sentidos de los esfuerzos cortantes resultan superfluos. En
tales casos, los esfuerzos cortantes serán designados por sin ningún subíndice. Sin embargo, debe
recordarse que los esfuerzos cortantes siempre se presentan en dos pares. Esta simplificación de la
notación puede usarse convenientemente para el estado de esfuerzo mostrado en la figura 1.5.
Y
σy
σy
σx σx
τ
τ
X
Fig. 1.5 Elemento de esfuerzo en un plano
Los esfuerzos bidimensionales mostrados en la figura se denominan esfuerzos en el plano. En
representación matricial tales esfuerzos pueden escribirse como:
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
0
0
0
0
0
y x
σ
τ
τ
σ
(Ec 1.4)
Debe notarse que el sistema de ejes seleccionado inicialmente puede no dar la información más
importante sobre el esfuerzo en un punto. Entonces, usando los procedimientos de la transformación de
que existe un conjunto particular de coordenadas que diagonaliza al tensor esfuerzo, que entonces toma la forma: ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ 3 2 1 0 0 0 0 0 0
σ
σ
σ
(Ec 1.5)Se debe notar la ausencia de esfuerzos cortantes. Para el caso tridimensional, se dice que los
esfuerzos son triaxiales, ya que son necesarios tres esfuerzos para describir completamente el estado de
esfuerzo. Para esfuerzo plano, 3=0 el estado de esfuerzo es biaxial. Tales esfuerzos ocurren, por
ejemplo, en láminas delgadas sometidas a esfuerzo en dos direcciones mutuamente perpendiculares. En
miembros cargados axialmente, sólo queda un elemento del tensor esfuerzo; tal estado se denomina
uniaxial.
1.5 Ecuaciones diferenciales de equilibrio
Un elemento infinitesimal de un cuerpo debe estar en equilibrio. Para el caso bidimensional, el
sistema de esfuerzos que actúan sobre un elemento infinitesimal (dx)(dy)(l) se muestra en la figura 1.6.
En esta deducción, el elemento es de espesor unitario en la dirección perpendicular al plano del papel.
Y σy τyx X σy σx τxy σx τyx τxy
De la figura 1.6 se obtienen las siguientes ecuaciones: dx x x x x ∂ ∂ + =σ σ
σ dy y y y y ∂ ∂ + =σ σ σ
(Ecs. 1.6)
dy y yx yx yx ∂ ∂ + =τ τ
τ dx
x xy xy xy ∂ ∂ + =τ τ τ
Note que se toma en cuenta la posibilidad de un incremento en los esfuerzos de una cara del
elemento a la otra. Por ejemplo, como la razón de cambio de x en la dirección x es ∂ x/ ∂x y se da un
paso de magnitud dx, el incremento es (∂ x/ ∂x )dx. La notación de derivada parcial tiene que usarse
para diferenciar entre las direcciones.
Las fuerzas inerciales o de cuerpo, como las causadas por el peso o por efectos magnéticos, se
designan X y Y y están asociadas con el volumen unitario del material. Con esas notaciones:
0
)
1
(
)
1
(
)
1
)(
(
)
1
(
)
1
)(
(
,
0
=
×
+
×
−
×
∂
∂
+
+
×
−
×
∂
∂
+
+
→
=
Σ
dxdy
X
dx
dx
dy
dy
dy
dx
Fx
yx y yx yx x x x xτ
τ
τ
σ
σ
σ
(Ec 1.7)Simplificando y recordando que xy = yx se cumple, obtenemos la ecuación básica de equilibrio
para la dirección x. Esta ecuación, junto con una análoga para la dirección y, tiene la forma:
0
0
=
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
Y
y
x
X
y
x
y xy yx xσ
τ
τ
σ
(Ec 1.8)El equilibrio por momento del elemento, ∑Mz = O, se satisface ya que xy = yx .Puede
demostrarse que para el caso tridimensional, una ecuación típica de un conjunto de tres, es:
0
=
+
∂
∂
+
∂
∂
+
∂
∂
X
z
y
x
zx yxx
τ
τ
σ
Observe que en la deducción de las ecuaciones previas, no se han usado las propiedades
mecánicas del material. Esto significa que esas ecuaciones son aplicables ya sea a material elástico,
plástico o viscoelástico. Es también muy importante notar que no hay suficientes ecuaciones de
equilibrio para determinar los esfuerzos desconocidos. En el caso bidimensional, dado por la ecuación:
0
0
=
+
∂
∂
+
∂
∂
=
+
∂
∂
+
∂
∂
Y
y
x
X
y
x
y xy yx xσ
τ
τ
σ
(Ecs 1.10)En la ecuación anterior existen tres esfuerzos desconocidos, x , y y xy y sólo dos ecuaciones.
Para el caso tridimensional, hay seis esfuerzos, pero sólo tres ecuaciones. Así entonces, todos los
problemas de análisis de esfuerzos son de forma interna estáticamente indeterminados.
Un procedimiento numérico que implica volver discreto un cuerpo en un gran número de
pequeños elementos finitos, en vez de los infinitesimales de antes, se usa ahora con frecuencia en
problemas complejos. Tal análisis con elementos finitos depende de las computadoras electrónicas de
alta velocidad para resolver grandes sistemas de ecuaciones simultáneas. En el método del elemento
finito, así como en el enfoque matemático, las ecuaciones de la estática son complementadas por las
relaciones cinemáticas y por las propiedades mecánicas del material.
1.6 Esfuerzo normal máximo en barras cargadas axialmente
En la mayor parte de las situaciones prácticas con barras cargadas axialmente, es conveniente
determinar directamente el esfuerzo normal máximo. Esos esfuerzos se desarrollan sobre secciones
perpendiculares al eje de la barra. Para tales secciones, el área de la sección transversal de una barra es
un mínimo y la componente de la fuerza aplicada es un máximo, lo que resulta en un esfuerzo normal
La ecuación básica para determinar directamente el esfuerzo normal máximo en una barra
cargada axialmente se da aquí en la forma habitual, es decir, sin ningún subíndice. Sin embargo, los
subíndices se agregan con frecuencia para indicar el sentido del eje de la barra. Esta ecuación da el
esfuerzo normal máximo en una sección perpendicular al eje del miembro. Entonces,
⎥⎦
⎤
⎢⎣
⎡
⎥⎦
⎤
⎢⎣
⎡
=
=
2
2
in
lb
o
m
N
A
P
area
Fuerza
σ
(Ec 1.11)Donde P es la fuerza axial aplicada y A es el área de la sección transversal del miembro. Es
conveniente notar que el esfuerzo normal a dado por la ecuación 1.11 es una descripción completa del
estado de esfuerzo en una barra cargada axialmente. La ecuación 1.11 se aplica estrictamente sólo a
barras prismáticas (es decir, a barras que tienen área transversal constante). Sin embargo, la ecuación es
razonablemente exacta para miembros ligeramente ahusados. La resultante de esfuerzo para uno
uniformemente distribuido, actúa por el centroide del área de una sección transversal y garantiza el
equilibrio de un miembro axialmente cargado. Si la carga es más compleja, como la de la parte de
máquina mostrada en la figura 1.7, la distribución del esfuerzo no es uniforme. Aquí, en la sección a-a,
además de la fuerza axial P. se desarrolla también un momento flexionante M.
Un razonamiento similar se aplica a miembros cargados axialmente en compresión y puede
entonces usarse la ecuación 1.11. Sin embargo, debe tenerse cuidado al investigar los miembros en
compresión. Éstos pueden ser tan esbeltos que no se comporten de la manera esperada. Por ejemplo,
una caña de pescar común, bajo una fuerza de compresión axial pequeña, tiene la tendencia a pandearse
lateralmente y a colapsarse.. La ecuación 1.11 es aplicable sólo a miembros robustos cargados
axialmente en compresión (es decir, bloques cortos). Llamando bloque corto a un bloque cuya menor
dimensión es aproximadamente un décimo de su longitud
Algunas veces los esfuerzos de compresión aparecen cuando un cuerpo está soportado por otro.
Si la resultante de las fuerzas aplicadas coincide con el centroide del área de contacto entre los dos
cuerpos, la intensidad de las fuerzas o esfuerzo entre los cuerpos puede determinarse de nuevo con la
ecuación 1.11. Es costumbre llamar a este esfuerzo normal esfuerzo de aplastamiento. Numerosas
situaciones similares aparecen en problemas mecánicos bajo las arandelas empleadas para distribuir
fuerzas concentradas. Esos esfuerzos de aplastamiento pueden aproximarse dividiendo la fuerza
aplicada P entre el área correspondiente de contacto, obteniendo así un esfuerzo de aplastamiento
nominal.
Al aceptar la ecuación 1.11, debe tenerse en cuenta que el comportamiento del material está
idealizado. Cada partícula de un cuerpo se supone que contribuye igualmente a resistir la fuerza. Se
implica una perfecta homogeneidad del material por tal suposición. Los materiales reales, como los
metales, consisten en un gran número de granos, mientras que la madera es fibrosa. En materiales
reales, algunas partículas contribuyen más a resistir una fuerza que otras. Las distribuciones ideales de
esfuerzos no existen en realidad si la escala escogida es suficientemente pequeña. La verdadera
distribución de esfuerzos varía en cada caso en particular y es sumamente irregular, sin embargo, en
promedio, hablando estadísticamente, los cálculos basados en la ecuación 1.11 son correctos y, por
consiguiente, el esfuerzo promedio calculado representa una cantidad altamente significativa.
Es también importante notar que las ecuaciones básicas para determinar esfuerzos, tal como la
materiales suelen ser alisados, resaltados, forjados, soldados, doblados y martillados. En las
fundiciones, los materiales no se enfrían uniformemente. Esos procesos pueden inducir altos esfuerzos
internos llamados esfuerzos residuales. En los problemas reales, tales esfuerzos residuales pueden ser
de gran tamaño y deben ser investigados cuidadosamente y luego sumados a los esfuerzos calculados
para el material inicialmente libre de esfuerzos. Ahora bien, como tenemos esfuerzos normales sólo en
una dirección el esfuerzo cortante máximo en una barra cargada axialmente es la mitad del valor del
esfuerzo normal máximo.
1.7. Esfuerzos cortantes
Algunos materiales de la ingeniería (por ejemplo, el acero al bajo carbono) son más débiles en cortante que en tensión, y, bajo cargas grandes, se desarrollan deslizamientos a lo largo de sus planos
de esfuerzo cortante máximo.
De acuerdo con la ecuacion 1.11, esos planos de deslizamiento en una probeta a tensión forman
ángulos de 45° con el eje de la barra, y es donde se presentan los esfuerzos cortantes máximos
max=P/2A. Sobre las superficies pulidas de una probeta, esas líneas pueden ser observadas fácilmente y
se llaman líneas de Lüders(1). Este tipo de comportamiento del material corresponde a una falla dúctil.
En muchas aplicaciones rutinarias de la ingeniería, grandes esfuerzos cortantes pueden
desarrollarse en posiciones críticas. Determinar tales esfuerzos con precisión suele ser difícil, sin
embargo, suponiendo que en el plano de una sección se desarrolla un esfuerzo cortante uniformemente
distribuido, puede encontrarse fácilmente una solución. Usando este enfoque, el esfuerzo cortante
promedio prom se determina dividiendo la fuerza cortante V en el plano de la sección entre el área
correspondiente A. m N 2 2 ⎥⎦ ⎤ ⎢⎣ ⎡ ⎥⎦ ⎤ ⎢⎣ ⎡ = = in lb A V area fuerza prom
τ
(Ec 1.12)En la figura 1.8 se muestran algunos ejemplos de dónde puede usarse convenientemente la
más grande. Separando el bloque superior del inferior por una sección imaginaria se obtiene el
diagra-ma de equilibrio mostrado en la figura l8(b). El pequeño par aplicado Pe, que genera pequeños
esfuerzos normales perpendiculares a la sección a-a, es comúnmente despreciado. Con base en esto,
prom mostrado en la figura l.8(c), puede encontrarse usando la ecuación 1.12 dividiendo P entre el área
A de la sección a-a. Un procedimiento similar se usa para determinar prom en el problema mostrado en
la figura l.8(d). Sin embargo, en este caso, dos superficies pegadas están disponibles para transferir la
carga aplicada P. El mismo enfoque, usando secciones imaginarias, es aplicable a miembros sólidos.
(a (d
(b) (e)
(c) (f)
Fig. 1.8 Condiciones de carga que causan esfuerzos cortantes entre las interfaces de bloques unidos
Ejemplos de dos conexiones atornilladas se muestran en las figuras l.9(a) y (e). Esas conexiones
pueden analizarse de dos maneras distintas. Según una de ellas, se supone que un tornillo apretado
desarrolla una fuerza de apriete suficientemente grande tal que la fricción desarrollada entre las
superficies en contacto impide que la junta se deslice. Para tales diseños se emplean comúnmente
tornillos de alta resistencia.
Un enfoque alternativo ampliamente usado supone que ocurre un deslizamiento tal que la
fuerza aplicada es transferida primero a un tornillo y luego del tornillo a la placa conectora, como se
ilustra en las figuras l.9(b) y (f). Para determinar prom en esos tornillos, se usa simplemente el área
transversal A de un tornillo en vez del área de la superficie de contacto de la junta para calcular el
esfuerzo cortante promedio. Se dice que el tornillo mostrado en la figura l.9(a) está en cortante simple,
mientras que el mostrado en la figura l.9(e) está en cortante doble.
(a) (b) (c) (d)
(e) (f) (g) (h)
Fig. 1.9Condiciones de carga que causan esfuerzos cortantes y de aplastamiento en tornillos
En conexiones soldadas, requiere consideración otro aspecto del problema. En casos como los
un tornillo y las placas. La intensidad nominal promedio de la presión se obtiene dividiendo la fuerza
transmitida entre el área proyectada del tornillo sobre la placa. A éste se le llama esfuerzo de
aplastamiento. El esfuerzo de aplastamiento en la figura 1 .9(a) es σb=P/td, donde t es el espesor de
la placa y d es el diámetro del tornillo. Para el caso en la figura l.9(e), los esfuerzos de aplastamiento
para la placa media y las placas exteriores son σ1=P/t1d y σ2=P/t2d , respectivamente.
El mismo procedimiento se aplica también a conexiones remachadas.
(a) (b) Fig. 1.10 Conexiones remachadas.
En el enfoque previo de diseño, ha sido despreciada la resistencia friccional entre las superficies
en contacto en los conectores. Sin embargo, si la fuerza de apriete desarrollada por un conector es
suficientemente grande y confiable, la capacidad de una junta puede ser determinada con base en la
fuerza de fricción entre las superficies en contacto. Esta condición se muestra en la figura 1.10. Con el
uso de tornillos de alta resistencia con rendimiento del orden de 100 ksi (700 MPa), éste es un método
aceptable en el diseño estructural de acero. El apriete requerido de tales tornillos se especifica
usualmente como aproximadamente el 70% de su resistencia a la tensión.
Para los fines de un análisis simplificado, se especifica un esfuerzo cortante permisible basado
en el área nominal de un tornillo. Esos esfuerzos se basan en experimentos. Esto permite que el diseño
tornillos o los remaches ordinarios.
Otra manera de unir miembros entre sí es por medio de soldadura. Un ejemplo de una conexión con
soldaduras de filete se muestra en la figura 1.11. El esfuerzo cortante máximo ocurre en los planos a-a
y b-b, como se muestra en la figura l.11(b). La capacidad de tales soldaduras es usualmente dada en
unidades de fuerza por unidad de longitud de soldadura.
Fig. 1.11Condición de carga que causa un esfuerzo cortante critico en dos planos de soldadura de
filete
1.8 Análisis de los esfuerzos normales y cortantes
Una vez que la fuerza axial P o la fuerza cortante V, así como el área A, han sido determinadas
en un problema dado, pueden aplicarse fácilmente las ecuaciones 1.11 y 1.12 para calcular los
esfuerzos normal y cortante. Esas ecuaciones que dan, respectivamente, las magnitudes máximas de los
esfuerzos normal y cortante, son particularmente importantes, ya que determinan la demanda máxima
sobre la resistencia de un material. Esos esfuerzos máximos ocurren en una sección de área transversal
mínima y/o de fuerza axial máxima. Tales secciones se llaman secciones críticas.
En los problemas más simples, la sección crítica para el arreglo particular que se analiza puede
encontrarse usualmente por inspección. En otros problemas, esto puede requerir un extenso análisis, el
Para el equilibrio de un cuerpo en el espacio, las ecuaciones de la estática requieren del
cumplimiento de las condiciones siguientes:
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
0
Mz
0
Fz
0
My
0
Fy
0
Mx
0
Fx
(Ecs. 1.13)1.9 Deformación unitaria
El esfuerzo puede relacionarse con la deformación por unidad de longitud de una probeta
usando medios experimentales para establecer una relación esfuerzo-deformación unitaria para un
material específico. Esta relación se llama modelo constitutivo de un material y expresa las
propiedades mecánicas más importantes de un material durante un proceso de carga. El modelo
constitutivo de un material se basa en resultados de experimentos que se llevan a cabo en condiciones
muy simples de carga. Cuando una relación constitutiva se combina con las ecuaciones de equilibrio y
compatibilidad, puede predecirse el comportamiento estructural general.
1.10 La prueba de tensión y la deformación unitaria normal
Las propiedades mecánicas de los materiales usados en ingeniería se determinan por medio de
experimentos efectuados sobre pequeñas probetas. Esos experimentos se llevan a cabo en laboratorios
equipados con máquinas de prueba, como la que se muestra en la figura 1.12, capaces de cargar en
tensión o en compresión.
Han sido desarrollados varios tipos de prueba para evaluar las propiedades de los materiales
bajo diferentes condiciones de carga, como carga estática de corta duración y cíclica, y también
prue-bas a largo plazo y de carga impulsiva. A través de los años, cada una de esas prueprue-bas se ha
estandarizado de manera que pueden ser comparados los resultados obtenidos en diferentes
laboratorios. En los Estados Unidos, la American Society for Testing and Materials (ASTM) ha
particular se considera aceptable.
Fig. 1.12 Máquina universal de pruebas (Cortesía de la MTS System Corporation).
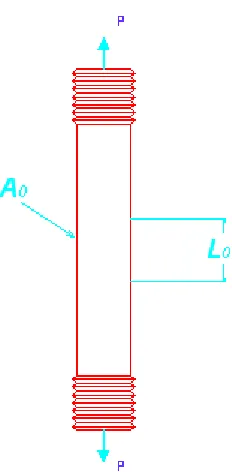
Uno de los experimentos más importantes es la prueba de tensión o compresión en la cual una
fuerza axial creciente P se aplica a una probeta cilíndrica como la de la figura 1.13. El área transversal
original Ao de la porción central de la probeta se calcula exactamente y dos marcas de calibración se
inscriben a una distancia Lo entre sí. La distancia Lo se llama longitud calibrada de la probeta. En un
experimento, el cambio en la longitud de esta distancia se mide por medio de un dispositivo llamado
extensómetro, Durante un experimento, el cambio en la longitud calibrada se registra como función de
la fuerza aplicada. Con la misma carga y una longitud calibrada mayor se observa una mayor
deformación que cuando la longitud calibrada es pequeña. Por tanto, es muy importante referirse a la
Si Lo longitud calibrada inicial y L es la longitud observada bajo una carga dada. el
alargamiento calibrado es ∆L = L – Lo. El alargamiento (o contracción) є por unidad de la longitud
calibrada inicial está dado por:
0
L
L
∆
=
ε
(Ec. 1.14)Esta expresión define la deformación unitaria en tensión (o en compresión}. Como esta
deformación unitaria está asociada con el esfuerzo normal, se llama comúnmente deformación unitaria
normal. Se trata de una cantidad sin dimensiones, pero es costumbre referirse a ella como si tuviera la
dimensión de mm/mm, in/in, m/m ó µm/m microdeformación unitaria). A veces la deformación
[image:40.612.248.364.352.588.2]unitaria se da como un porcentaje de la longitud original. La cantidad є es por lo general muy pequeña.
Fig. 1.13Probeta cilíndrica de pruebas
Como por lo general las deformaciones unitarias que se encuentran son muy pequeñas, es
Éstos se fabrican de alambre muy fino o laminitas muy delgadas que se pegan al miembro que
se está investigando. Cuando las fuerzas son aplicadas al miembro, el alargamiento o contracción de
los alambres o laminitas tiene lugar en forma concurrente con cambios similares en el material. Esos
cambios de longitud alteran la resistencia eléctrica del extensómetro que puede medirse y calibrarse
para indicar la deformación unitaria que está ocurriendo. Tales extensómetros, adecuados para diversas
condiciones ambientales, están disponibles en varias longitudes que varían entre 4 y 140 mm.
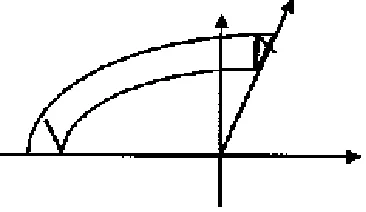
1.11 Esfuerzos principales en problemas bidimensionales
A menudo el interés se centra en la determinación del máximo esfuerzo posible, como es dado
por las ecuaciones de transformación de esfuerzo.
θ τ θ σ σ σ σ
σ cos2 2
2 2 ´` sen y x y x x + − + +
= (Ec. 1.15)
θ τ θ σ
σ
τ 2 cos2
2 +
− −
= x y sen
xy (Ec.1.16)
Por lo que se encuentran primero los planos en que tales esfuerzos ocurren. Para encontrar el
plano para un esfuerzo normal máximo o mínimo, la ecuación 1.15 se deriva con respecto a α y la derivada se iguala a cero; es decir:
0 2 cos 2
2 + =
− − = σ σ θ τ θ θ σ sen d
d x x y
(
)
/2 2 tan 1 y x xy σ σ τ θ −= (Ec. 1.17)
Dónde el subíndice del ángulo θ se usa para designar el ángulo que define el plano del esfuerzo normal máximo o mínimo. La ecuación 1.17 tiene dos raíces, ya que el valor de la tangente de un
raíces están a 180° entre sí, y como la ecuación 1.17 es para un ángulo doble, las raíces de θ1 están a
90° entre sí. Una de esas raíces localiza el plano sobre el cual actúa el esfuerzo normal máximo; la otra
localiza el plano correspondiente al esfuerzo normal mínimo. Para distinguir entre esas dos raíces, se
usa una prima y una doble prima como notación.
Fig. 1.14 Funciones angulares para esfuerzos principales.
Antes de evaluar esos esfuerzos, observe cuidadosamente que si se quiere la posición de los
planos en que no actúan esfuerzos cortantes, la ecuación 1.16 debe hacerse igual a cero. Esto da la
misma relación que la ecuación 1.17. Por tanto, llegamos a una importante conclusión: Sobre planos
en que ocurren esfuerzos normales máximos o mínimos, no se tienen esfuerzos cortantes.
Esos planos se llaman planos principales de esfuerzo y los esfuerzos que actúan en esos planos,
o sea los esfuerzos normales máximo y mínimo, se llaman esfuerzos principales. Las magnitudes de
los esfuerzos principales pueden obtenerse sustituyendo los valores de las funciones seno y coseno
correspondientes al ángulo doble dado por la ecuación 1.17 en la ecuación 1.15. Entonces los
resultados se simplifican y la expresión para el esfuerzo normal máximo (denotado por 1) el
esfuerzo normal mínimo (denotado por 2) toma la forma
( )
22 2 1 min max ' 2 2 xy y x y x o x τ σ σ σ σ σ σ ⎟⎟ + ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ± − =
Donde el signo positivo frente a la raíz cuadrada debe usarse para obtener 1 y el signo negativo
para obtener 2. Los planos en que esos esfuerzos actúan pueden determinarse usando la ecuación 1.17.
1.12. Esfuerzos cortantes máximos en problemas bidimensionales
Si x , y y xy son conocidos para un elemento, el esfuerzo cortante sobre cualquier plano
definido por un ángulo θ está dado por la ecuación 1.16 y puede hacerse un estudio del esfuerzo cortante. Entonces, para localizar los planos sobre los que actúan los esfuerzos cortantes máximo o
mínimo, la ecuación 1.16 debe ser diferenciada con respecto a θ y la derivada igualada cero. Al hacerlo así y simplificar los resultados, se obtiene:
(
)
2 / 2 tan 2 xy y x τ σ σθ = − (Ec. 1.19)
Donde se pone el subíndice 2 a θ para designar el plano sobre el cual el esfuerzo cortante es máximo o mínimo. Igual que la ecuación 1.17, la ecuación 1.19 tiene dos raíces, que de nuevo pueden
diferenciarse entre sí poniendo a θ2 una prima o una doble prima. Los dos planos definidos por la
ecuación son mutuamente perpendiculares. Además, el valor de tan2θ2 por la ecuación 1.18 es el
recíproco negativo del valor de tan 2 θ1 de la ecuación 1.17. Por consiguiente, las raíces para los
ángulos dobles de la ecuación 1.19 están a 90° de las correspondientes raíces de la ecuación 1.17. Esto
implica que los ángulos que localizan los planos de esfuerzo cortante máximo o mínimo forman
ángulos de 45° con los planos de los esfuerzos principales. La sustitución en la ecuación 1.15 de las
funciones seno y coseno correspondientes al ángulo doble dado por la ecuación 1.19 y determinadas
como se hizo antes en la figura 1.14, da los valores máximo y mínimo de los esfuerzos cortantes. Éstos,
después de efectuar algunas simplificaciones, son:
( )
22
min max
2 xy
y
x σ τ
σ τ ⎟⎟ + ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ±
= (Ec. 1.20)
El esfuerzo cortante máximo difiere entonces del esfuerzo cortante mínimo sólo en el signo.
también significa que los valores numéricos de los esfuerzos cortantes sobre los planos mutuamente
perpendiculares son los mismos. El esfuerzo cortante más grande, independientemente del signo, será a
menudo llamado el esfuerzo cortante máximo.
El sentido del esfuerzo cortante puede siempre ser determinado por sustitución directa de la raíz
particular de θ2 en la ecuación 1.16. A diferencia de los esfuerzos principales para los cuales no se
presentan esfuerzos cortantes sobre los planos principales, los esfuerzos cortantes máximos actúan
sobre planos que usualmente no están libres de esfuerzos normales. La sustitución de θ2 de la ecuación
1.19 en la ecuación 1.15 muestra que los esfuerzos normales que actúan sobre los planos de los
es-fuerzos cortantes máximos son:
2
'
y
x σ
σ
σ = − (Ec. 1.21)
Por tanto, un esfuerzo normal actúa simultáneamente con el esfuerzo cortante máximo a menos
que σx+σy sea cero.
Si σx yσy en la ecuación 1.20 son esfuerzos principales,
τ
xyes cero y la ecuación 1.20 sesimplifica a:
( )
2
min
max σx σy
τ =± − (Ec. 1.22)
Los resultados de este análisis se muestran en la figura 1.15. La ecuación 1.17 muestra
cla-ramente que en ausencia de esfuerzos normales, los esfuerzos principales son numéricamente iguales al
esfuerzo cortante. El sentido de los esfuerzos normales se obtiene con la ecuación 1.17. Los esfuerzos
cortantes actúan hacia la diagonal DF en la dirección de los esfuerzos principales de tensión; véase la
Y
σ1=⏐τxy⏐ F
σ2=⏐τxy⏐
F
X
(a) (b) (a) (b)
τxy
D
450
τxy ⏐τxy⏐
450 D
⏐τxy⏐
(c) (c)
Fig. 1.15 Representaciones equivalentes para un esfuerzo cortante puro. Fig. 1.15 Representaciones equivalentes para un esfuerzo cortante puro.
1.13 Falla de un elemento 1.13 Falla de un elemento
Se requiere que un diseñador seleccione un material y dimensione adecuadamente un elemento
para realizar una función especificada sin fallar.
Se requiere que un diseñador seleccione un material y dimensione adecuadamente un elemento
para realizar una función especificada sin fallar.
Falla se define como el estado o condición en el cual un elemento o una estructura deja de
realizar su trabajo para el cual fue concebido, de manera adecuada. Dentro de falla tenemos las Falla se define como el estado o condición en el cual un elemento o una estructura deja de