INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
METODOLOGÍA DE SIMULACIÓN DE UN CONTROL
DE VELOCIDAD DE UN MOTOR DE C.D. CON
EXCITACIÓN SEPARADA Y LAZO DE CORRIENTE
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENIERO ELECTRICISTA
PRESENTAN:
CAMPERO CHÁVEZ ANGEL
CORONA MENDOZA ROCIO
JARA SIXTOS RAÚL GUILLERMO
ASESOR TÉCNICO:
M. EN C. JAVIER HERRERA ESPINOSA
AGRADECI MI ENTOS
Este trabajo va dedicado a todas aquellas personas que colaboraron para su realización. A nuestros familiares, compañeros, profesores y seres queridos que nos han apoyado de alguna manera a lo largo de esta carrera, así como en su colaboración en el desarrollo de nuestro trabajo.
Al M. en C. Javier Herrera Espinosa, asesor técnico de la tesis y su equipo de trabajo por todo su apoyo y su disposición para transmitirnos sus conocimientos, sin los cuales este trabajo no hubiera sido posible.
A la profesora Erika Virginia De Lucio Rodríguez, asesora de la tesis, por confiar en la finalización de este proyecto.
Angel Campero Chávez
A mis padres Gloria Chávez Juárez y Angel Campero Martínez, por el apoyo incondicional que siempre me han brindado y a quienes estaré eternamente agradecido por el amor y enseñanzas dadas a mis hermanas y a mí.
A mis hermanas Odette y Aurora, que siempre me han apoyado compartiendo su amor, amistad y conocimientos en los momentos en que más lo he necesitado.
A mi abuela María del Refugio Juárez Mosqueda (mamá Cuca), por el amor y apoyo dados en el transcurso de mi carrera.
A mis compañeros de tesis Rocio y Guillermo, con quienes he compartido grandes experiencias y momentos difíciles. Saben que cuentan conmigo de forma incondicional.
A mis familiares y seres queridos, que siempre me apoyaron y confiaron en mí, aunque unos han tenido que partir a cumplir un servicio más alto. Siempre les recordaré con cariño.
A mis compañeros de carrera y amigos de la vida, porque de alguna forma he aprendido algo de ellos y hemos tenido vivencias inolvidables.
Rocío Corona Mendoza
A mis padres, Jorge Corona Cisneros y Maria del Carmen Mendoza Gámez por su apoyo durante toda mi vida y con el cual he logrado terminar mi carrera profesional; por su cariño y comprensión y porque siempre me han impulsado a seguir adelante.
A mi hermana, Maribel por ser un ejemplo a seguir y por toda su ayuda brindada en los momentos mas difíciles por los que he pasado.
A mis compañeros de tesis Angel Campero y Guillermo Jara, porque demostramos que con ganas y esfuerzo, pudimos realizar nuestro objetivo.
A mis compañeros y amigos de la carrera por todos los momentos inolvidables que hemos pasado, por los consejos que me brindaron y porque siempre demostraron un apoyo incondicional.
A mis profesores, por todas sus enseñanzas, por el tiempo dedicado, por compartir sus experiencias laborales que nos ayudaran a lo largo de nuestro desempeño laboral.
En memoria de:
Raúl Guillermo Jara Sixtos
A mis padres:
Rene Jara Cortes y Guadalupe Sixtos Segura, por apoyarme en cada paso de mi vida, por esforzarse día a día para que nuestra familia salga adelante, siendo un ejemplo a seguir como personas, pero sobre todo por entregarme su amor incondicional.
A mis hermanos:
Rene, Jorge y Raquel, por estar siempre conmigo, por sus consejos, por su comprensión, por su aliento para seguir adelante, por orientarme, por aguantarme, por acompañarme, por ser además mis amigos incondicionales, por hacer de este lazo de sangre una verdadera unión de fraternidad inquebrantable.
A toda mi familia, por su preocupación, interés en mi persona y por sus buenos deseos. A mis compañeros de tesis, Angel y Rocio, aunque hemos tenido diferencias, pero hemos sabido superarlas con éxito.
A mis compañeros y amigos de toda la carrera y de mi vida, con quienes compartí muchos momentos inolvidables, porque sin ellos el camino recorrido hubiera sido más difícil. Nombrarlos a todos sería difícil, pero todos a quienes estimo saben de antemano quienes son.
A Gladis por ser un gran apoyo en esta recta final de la carrera, por ayudarme a aterrizar mis ideas y a calmarme en mis momentos de mayor tensión, por darme su cariño y por compartirme tanta felicidad.
A Dios y a la vida por darme la oportunidad de llegar hasta este momento.
METODOLOGÍA
DE
SIMULACIÓN
DE
UN
CONTROL
DE
VELOCIDAD
DE
UN
MOTOR
DE
C.C.
CON
EXCITACIÓN
SEPARADA
Y
LAZO
DE
CORRIENTE
RESUMEN
En este trabajo presenta una serie de pasos para llegar a la sintonización de un regulador de control de velocidad de un motor de C.C. con excitación separada y lazo de corriente, empleando para el control de velocidad el algoritmo tipo Takagi- Sugeno, y para el lazo de corriente, un control convencional Proporcional Integral (PI).
Como en este trabajo se emplea un motor de C.C. con excitación separada, primeramente se presenta una descripción de los motores eléctricos de C.C., así como del modelo matemático de un motor de C.C. con excitación separada.
Posteriormente se describen los tipos de controladores que existen, empezando por la descripción del los controladores convencionales, los esquemas básicos de control difuso y la relación de un control convencional y un controlador difuso.
Posteriormente, se realiza la simulación del control de velocidad con lazo de corriente usando programación a bloques en Simulink de Matlab que es una herramienta computacional que permite modelar sistemas dinámicos usando bloques funcionales.
Por último, se presentan los resultados obtenidos mediante las graficas de la simulación que muestran los valores de velocidad y corriente en los momentos en que se realiza el arranque de la máquina, cuando se le adiciona carga y cuando se le libera de ésta. Estos resultados son los obtenidos a partir de la simulación con dos motores de C.C. con excitación separada de diferentes capacidades.
ÍNDICE
RESUMEN I
ÍNDICE II
GLOSARIO VI
LISTA DE SÍMBOLOS IX
ÍNDICE DE FIGURAS XII
ÍNDICE DE TABLAS XVII
CAPITULO 1. INTRODUCCIÓN
1.1 GENERALIDADES 1
1.2 ANTECEDENTES 3
1.3 OBJETIVO GENERAL 6
1.4 JUSTIFICACIÓN 6
1.5 ESTRUCTURA DE LA TESIS 6
CAPITULO 2. MOTOR DE C.C. CON EXCITACIÓN SEPARADA
2.1 INTRODUCCIÓN A LA MAQUINA DE C.C. 7
2.2 CLASIFICACIÓN DE MOTORES ELÉCTRICOS DE C.C. 9
2.2.1 MOTORES ELÉCTRICOS DE C.C. 9
2.2.2 DESCRIPCIÓN DE LOS MOTORES DE C.C. 11
2.2.3 MOTOR SERIE 12
2.2.3.1 CONTROL DE VELOCIDAD DEL MOTOR
SERIE 13
2.2.4.1 CONTROL DE VELOCIDAD DEL MOTOR
DERIVADO 15
2.2.5 MOTOR COMPUESTO 17
2.2.6. MOTOR DE C.C. CON EXCITACIÓN
SEPARADA 20
2.3MODELO MATEMÁTICO DEL MOTOR DE C.C. CON EXCITACIÓN
SEPARADA 21
2.4 MEDICIÓN DE VELOCIDAD DEL MOTOR 24
CAPITULO 3. CONTROLADORES
3.1 INTRODUCCIÓN 25
3.2 CONTROLADORES CONVENCIONALES 25
3.2.1 CONTROL PROPORCIONAL 26
3.2.2 CONTROL INTEGRAL 26
3.2.3 CONTROL PROPORCIONAL E INTEGRAL 27
3.2.4 CONTROL PROPORCIONAL- DERIVATIVO 28
3.2.5 CONTROL PROPORCIONAL- INTEGRAL- DERIVATIVO 29
3.3 CONTROLADORES CONVENCIONAL COMO UN CONTROL DIFUSO 29
3.3.1 CONTROLADOR DIFUSO PROPORCIONAL (P) 30
3.3.2 CONTROLADOR DIFUSO PROPORCIONAL DERIVATIVO (PD) 31
3.3.3 CONTROL DIFUSO PROPORCIONAL INTEGRAL (PI) 31
3.3.4 CONTROLADOR DIFUSO
PROPORCIONAL- INTEGRAL- DERIVATIVO (PID) 31
3.4 INTRODUCCIÓN A LA LÓGICA DIFUSA 32
3.6 CONTROL CON LÓGICA DIFUSA 35
3.7 ALGORITMOS DE CONTROL DE VELOCIDAD DIFUSO 35
3.8 DESCRIPCIÓN DEL ALGORITMO DE CONTROL TAKAGI- SUGENO 37
3.8.1 GENERACIÓN DE VALORES DIFUSOS 37
3.8.2 EVALUACIÓN DE REGLAS 37
CAPITULO 4. SISTEMA DE CONTROL DE VELOCIDAD TIPO TAKAGI-
SUGENO CON LAZO DE CORRIENTE
4.1 INTRODUCCIÓN 39
4.2 DISEÑO DEL ALGORITMO DE CONTROL DE VELOCIDAD
TIPO TAKAGI-SUGENO 39
4.3 DIAGRAMA A BLOQUES DEL REGULADOR DE VELOCIDAD PARA EL
MOTOR DE CD CON EXCITACIÓN SEPARADA CON LAZO DE CORRIENTE 42
4.4 MODELADO DEL SISTEMA PARA LA SIMULACIÓN 43
4.4.1 DESCRIPCIÓN POR BLOQUES DEL MÉTODO TAKAGI – SUGENO
PROPUESTO. 43
4.4.2 DESCRIPCIÓN DEL BLOQUE “MÁQUINA DE C.C.” 46
4.4.3 DESCRIPCIÓN DEL BLOQUE SUBSISTEMA DIFUSO 48
CAPITULO 5. RESULTADOS, CONCLUSIONES Y TRABAJOS A FUTURO
5.1 PASOS PARA LA SINTONIZACIÓN DEL CONTROL 53
5.2 RESULTADOS 54
5.4 TRABAJOS A FUTURO 85
APÉNDICE A
A.1 METODO DE ZIEGLER- NICHOLS 86
APÉNDICE B
B.1 MÉTODO PARA GRAFICAR EN MATLAB 89
GLOSARIO
Campo magnético: es el campo vectorial que describe las acciones que ejercen los imanes
entre sí, los imanes con los conductores recorridos por corrientes, o los conductores entre sí
(recorridos por corrientes). La acción de un campo magnético sobre una carga en
movimiento es el origen de las fuerzas que este campo ejerce sobre los conductores
recorridos por corrientes; en efecto, una carga en movimiento es el prototipo de corriente
eléctrica.
Corriente eléctrica: es un movimiento ordenado de electricidad, ósea de cargas eléctricas,
a través de un medio cualquiera o bien a lo largo de un circuito; la misma expresión se usa
a menudo por brevedad en lugar de intensidad de corriente. Se mide en Amperes y se
indica con el símbolo A. Una corriente eléctrica, puesto que se trata de un movimiento de
cargas, produce un campo magnético.
Electroimán: elemento eléctrico capaz de generar flujos magnéticos idénticos a los
producidos por los imanes permanentes cuando es excitado por una corriente. Está formado
por un núcleo central de material ferromagnético sobre el que se arrolla un circuito eléctrico
de espiras muy juntas, que será recorrido por la corriente eléctrica. Sus funciones
específicas se cumplen cuando el arrollamiento es recorrido por corriente continua, si bien
también puede funcionar con corriente alterna, pero en condiciones diferentes.
Electromagnetismo: rama de la física que estudia las acciones mutuas entre corrientes
eléctricas y magnéticas teniendo en cuenta que las corrientes eléctricas generan campos
magnéticos, mientras que, al igual que los imanes, sufren acciones mecánicas por parte de
los campos magnéticos exteriores con los cuales se concatenan los circuitos.
Frecuencia: magnitud física, relativa a los fenómenos periódicos, que representa el número
Fuerza magnetomotriz: se define matemáticamente como integral del campo magnético a
lo largo de una línea de fuerza cerrada. Corresponde en forma dual a la fuerza electromotriz
y como tal puede definirse como causa capaz de generar y mantener una diferencia de
potencial magnético en un circuito magnético cerrado por el que circule un flujo de
inducción más o menos grande, según sea la reluctancia del propio circuito. Dicha fuerza
está expresada por el producto del número de espiras y la intensidad de la corriente
eléctrica, siendo su unidad de medida el ampere-vuelta. Usualmente para denominarla se
utiliza la letra “F”. La F necesaria para producir un Φ de una densidad determinada.
Inducción electromagnética: fenómeno físico, de carácter electromagnético, en virtud del
cual se produce una fuerza electromotriz en un circuito cerrado, incluso separado y distante
de la causa inductora, cuando varía el flujo magnético conectado con él. Éste se produce
también cuando un conductor abierto atraviesa las líneas de inducción de un campo
magnético.
Inductancia: se le define así al cociente entre el flujo magnético concatenado y a la
intensidad de la corriente que lo genera. En el caso de circuitos cualesquiera, la inductancia
es el cociente de la energía electromagnética, debida a la corriente, dividida por la mitad del
cuadrado de la intensidad de dicha corriente.
Intensidad de corriente: cantidad elemental de electricidad que atraviesa, en un elemento
infinitesimal de tiempo, la sección de un conductor representativo de un circuito recorrido
por la corriente, dividida por el intervalo infinitesimal de tiempo considerado. En el
Sistema Internacional de Unidades se expresa en C·s-1 (coulomb por segundo), unidad que se denomina ampere.
Microcontrolador: es un circuito integrado que nos ofrece las posibilidades de un pequeño computador. En su interior encontramos un procesador, memoria, y varios periféricos.
Motor eléctrico: maquina que transforma energía eléctrica en energía mecánica, con el fin
Par motor: es la fuerza que es capaz de ejercer un motor en cada giro. El giro de un motor
tiene dos características: el par motor y la velocidad de giro. Por combinación de estas dos
se obtiene la potencia.
Potencia: en el campo de las corrientes continuas, se define como potencia eléctrica en un
circuito al producto de la diferencia de potencial aplicada a sus extremos por la intensidad
de la corriente que circula por el mismo y viene expresado en watts.
Reóstato: aparato constituido por una o más resistencias, de forma que realice una
resistencia variable que se introduce en un circuito eléctrico con el fin de regular la
intensidad de la corriente que circula en él. Los reóstatos más simples son los de cursor,
constituidos por un hilo de material de elevada resistividad y de calibre constante, llamado
reóforo, arrollado alrededor de un soporte aislante y sobre el que puede deslizarse, con
cierta presión, un elemento como cursor. En función de la posición del cursor se utiliza una
porción más o menos grande de la resistencia.
Resistencia: se define como la resistencia de un conductor recorrido por una corriente
eléctrica continua la relación entre la diferencia de potencial aplicada a sus extremos y la
intensidad de la corriente. Su valor viene dado en Ohms, se designa con la letra griega
omega mayúscula (Ω), y se mide con el Óhmetro.
Matlab: Software especializado para uso en ingeniería.
Simulink: Herramienta computacional del software de Matlab, usado especialmente en
simulaciones.
LISTA
DE
SÍMBOLOS
a1 Es la constante de error actual cuando el valor absoluto del error es bajo. a2 Es la constante de error actual cuando el valor absoluto del error es alto. B Coeficiente de fricción viscosa
B L Coeficiente de fricción viscosa de la carga.
b1 Es la constante de error anterior cuando el valor absoluto del error es bajo. b2 Es la constante de error anterior cuando el valor absoluto del error es alto. Bm Coeficiente de fricción viscosa del motor.
C.A. Corriente Alterna.
C.C. Corriente Continua.
e(k) Error actual.
e(k-1) Error anterior.
) (k
e Error absoluto actual.
fe Frecuencia eléctrica.
fmm Fuerza magnetomotriz.
I1 Corriente de campo. IA Corriente de armadura. J Momento de inercia.
K Constante de motor = LA1 I1. Kexc Constante del excitador. Kt Constante del transductor. L11 Inductanciadel campo.
LA1 Inductancia mutua de velocidad. LAA Inductancia de armadura. P Potencia real.
R1 Resistencia de campo. RA Resistencia de armadura. Te Par electromagnético.
Tex Constante de tiempo del excitador. TL Par externo de la carga.
Tt Constante de tiempo del transductor.
u(k) Salida total real discreta.
u1(k) Salida actual real evaluada cuando el valor del error está en “BAJO”.
u1(k-1) Salida anterior real evaluada cuando el valor del error está en “BAJO”.
u2(k) Salida actual real evaluada cuando el valor del error está en “ALTO”.
u2(k-1) Salida anterior real evaluada cuando el valor del error está en “ALTO”.
V1 Voltaje de campo. VA Voltaje de armadura. VCD Voltaje en corriente directa. Vent Voltaje de entrada.
Vsal Voltaje de salida.
ηm Velocidad mecánica.
ω Velocidad rotacional o frecuencia angular.
μ Grado de membrecía.
μalto Grado de membrecía alto del valor absoluto del error.
μbajo Grado de membrecía bajo del valor absoluto del error.
ÍNDICE
DE
FIGURAS
CAPITULO 2
Figura 2.1 Clasificación de los motores eléctricos
Figura 2.2 Estructura física y magnética de un motor o generador de C.C.
Figura 2.3 Diagrama eléctrico de un motor con conexión tipo Serie.
Figura 2.4 Colocación de un reóstato en paralelo al campo para el control de velocidad.
Figura 2.5 Curvas características del motor Serie.
Figura 2.6 Diagrama eléctrico de un motor con conexión en Derivación.
Figura 2.7 Diagrama de conexión del reóstato de control de velocidad en serie con la armadura en un motor Derivado.
Figura 2.8 Diagrama de conexión del reóstato de control de velocidad en paralelo con la armadura en un motor Derivado.
Figura 2.9 Curvas características del motor Derivado.
Figura 2.10 Diagrama eléctrico de un motor con conexión Compuesta.
Figura 2.11 Diagrama eléctrico de un motor Compuesto a) aditivo con derivación larga,
b) aditivo con derivación corta.
Figura 2.12 Diagrama eléctrico de un motor Compuesto a) sustractivo con derivación larga,
Figura 2.13 Curvas de relación de velocidad de un motor Derivado y los campos de un motor Compuesto.
Figura 2.14 Conexión de una fuente de excitación separada a los devanados de un motor de C.C.
Figura 2.15 Motor de C.C. con excitación separada con corriente de campo constante.
Figura 2.16 Diagrama a bloques de un motor de C.C. con excitación separada utilizado en la simulación.
CAPITULO 3
Figura 3.1 Diagrama de bloque de la acción de control proporcional.
Figura 3.2 Diagrama de bloque de la acción de control integral.
Figura 3.3 Diagrama de bloques de la acción de control proporcional- integral.
Figura 3.4 Diagrama de bloques de la acción de control proporcional- derivativa.
Figura 3.5 Diagrama de bloques de la acción de control proporcional- integral- derivativa.
Figura 3.6 Ejemplos de Funciones de membrecía.
Figura 3.7 Algoritmo de Takagi –Sugeno.
Figura 3.8 Algoritmo de Mamdani.
Figura 3.9 Evaluación de reglas y obtención de Salidas reales para el método Takagi- Sugeno.
CAPITULO 4
Figura 4.1 Funciones de membrecía tipo trapezoidal para la variable de entrada.
Figura 4.2. Diagrama a bloques del control de velocidad tipo Takagi-Sugeno.
Figura 4.3 Diagrama a bloques del motor de C.C. con excitación separada considerando la corriente de campo constante, con lazo de corriente y limitador de corriente.
Figura 4.5 Programación a bloques en “Simulink” para el motor de C.C.
Figura 4.6 Bloque de Simulink “Carga Datos”.
Figura 4.7 Bloques de Simulink de visualización y almacenamiento de datos.
Figura 4.8 Bloque de Simulink “Controlador PI”.
Figura 4.9 Bloque de Simulink “Ke”.
Figura 4.10 bloque de Simulink “Kt”.
Figura 4.11 bloques de Simulink “Tension de referencia” y “Sum5”.
Figura 4.12 bloque de Simulink “Maquina de C.C.”
Figura 4.13 Constitución del bloque “Máquina de C.C.”
Figura 4.14 Bloques de Simulink “Transfer Fcn” y bloques de ganancia.
Figura 4.15 Bloques de Simulink “Par de carga 1, 2 y 3”, “Sum3” y “Sum2”.
Figura 4.16 Bloques de Simulink “Transfer Fcn” y bloque de saturación.
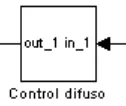
Figura 4.17 Bloque de Simulink “Control difuso”.
Figura 4.18 Subsistema control difuso.
Figura 4.19 Bloque de Simulink “Error alto” y bloque de saturación.
Figura 4.20 Bloque de Simulink “Error bajo” y bloque de saturación.
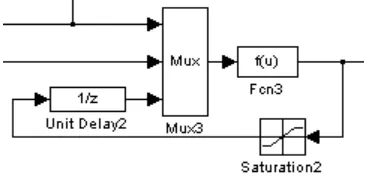
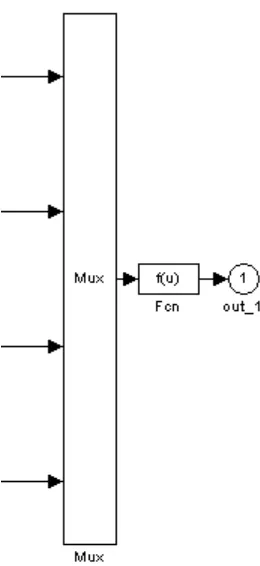
Figura 4.21 Bloques de Simulink “Mux 3” y “Fcn 3”.
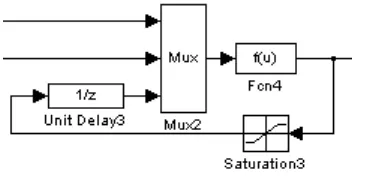
Figura 4.22 Bloques de Simulink “Mux 2” y “Fcn 4”.
Figura 4.23 Bloque de Simulink “Fcn” correspondiente a la salida real.
CAPITULO 5
Figura 5.1 Respuesta de la corriente de armadura y de la velocidad sin ningún tipo de controlador
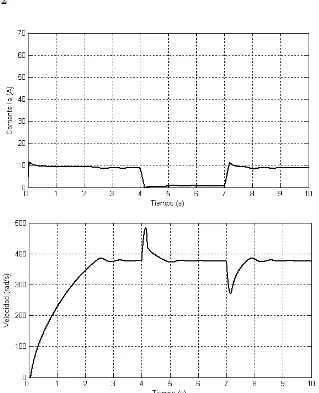
Figura 5.2 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Figura 5.3 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Kp = 0.28 Ki = 0.77 Kpb = 0 Kib = 1 Kpa = 0 Kia = 1
Figura 5.4 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Kp = 0.28 Ki = 0.77 Kpb = 0 Kib = 11 Kpa = 0 Kia = 1
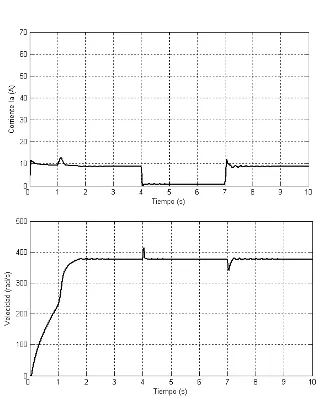
Figura 5.5 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Kp = 0.28 Ki = 0.77 Kpb = 200 Kib = 11 Kpa = 0 Kia = 1
Figura 5.6 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Kp = 0.28 Ki = 0.77 Kpb = 200 Kib = 11 Kpa = 0 Kia = 2.6
Figura 5.7 Respuesta de la corriente de armadura y de la velocidad del primer motor con:
Kp = 0.28 Ki = 0.77 Kpb = 200 Kib = 11 Kpa = 0 Kia = 2.6
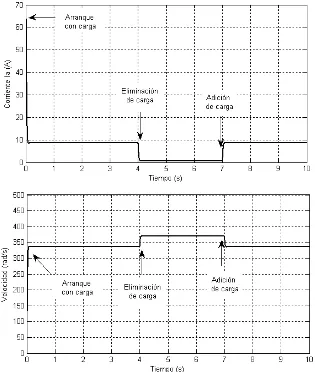
Figura 5.8 Comparación de la velocidad para el arranque con carga en el primer motor.
Figura 5.9 Comparación de la velocidad en el momento en el que se elimina la carga en el primer motor.
Figura 5.10 Comparación de la velocidad en el momento en el que se adiciona la carga en el primer motor.
Figura 5.11 Comparación de la corriente de armadura para el arranque con carga en el primer motor.
Figura 5.12 Comparación de la corriente de armadura en el momento en el que se elimina la carga en el primer motor.
Figura 5.13 Comparación de la corriente de armadura en el momento en el que se adiciona la carga en el primer motor.
Figura 5.14 Respuesta de la corriente de armadura y de la velocidad del segundo motor sin ningún tipo de controlador.
Figura 5.15 Respuesta de la corriente de armadura y de la velocidad del segundo motor con:
Kp = 0.001 Ki = 0.001 Kpb = 0 Kib = 1 Kpa = 0 Kia = 1
Figura 5.17 Respuesta de la corriente de armadura y de la velocidad del segundo motor con:
Kp = 0.23 Ki = 0.079 Kpb = 0 Kib = 3.5 Kpa = 0 Kia = 1
Figura 5.18 Respuesta de la corriente de armadura y de la velocidad del segundo motor con:
Kp = 0.23 Ki = 0.079 Kpb = 155 Kib = 3.5 Kpa = 0 Kia = 1
Figura 5.19 Respuesta de la corriente de armadura y de la velocidad del segundo motor con:
Kp = 0.23 Ki = 0.079 Kpb = 155 Kib = 3.5 Kpa = 0 Kia = 1.52
Figura 5.20 Respuesta de la corriente de armadura y de la velocidad del segundo motor con:
Kp = 0.23 Ki = 0.079 Kpb = 155 Kib = 3.5 Kpa = 0 Kia = 1.52
Figura 5.21 Comparación de la velocidad para el arranque con carga en el segundo motor.
Figura 5.22 Comparación de la velocidad en el momento en el que se elimina la carga en el segundo.
Figura 5.23 Comparación de la velocidad en el momento en el que se adiciona la carga en el segundo.
Figura 5.24 Comparación de la corriente de armadura para el arranque con carga en el segundo.
Figura 5.25 Comparación de la corriente de armadura en el momento en el que se elimina la carga en el segundo motor.
Figura 5.26 Comparación de la corriente de armadura en el momento en el que se adiciona la carga en el segundo motor.
APÉNDICE A
Figura A.1 Respuesta al escalón de magnitud de X unidades de una planta en lazo abierto.
Figura A.2 Curva de respuesta en forma de S.
Figura A.3 Sistema de lazo cerrado con control proporcional.
ÍNDICE
DE
TABLAS
CAPITULO 2
Tabla 2.1 Características y aplicaciones de los motores tipo serie, derivado y compuesto.
CAPITULO 5
Tabla 5.1. Especificaciones y parámetros del motor de C.C. para la aplicación del modelo
Tabla 5.2. Especificaciones y parámetros del motor de C.C. para la aplicación del modelo
APÉNDICE A
Tabla A.1. Reglas de sintonización de Ziegler- Nichols basadas a la entrada de un escalón.
Tabla A.2 Reglas de sintonización de Ziegler- Nichols basadas en la ganancia Kcr y en el
I NTRODUCCI ÓN
1.1 GENERALIDADES
Las máquinas eléctricas son aquellas en las cuales se lleva a cabo una gran parte de la conversión de la energía. Estas máquinas pueden clasificarse en torno a la circunstancia en que la energía eléctrica se tenga en la entrada o a la salida de la misma.
Las máquinas que tienen como entrada energía mecánica y salida energía eléctrica se conocen como generadores eléctricos, y las máquinas que tienen energía eléctrica en la entrada y a la salida energía mecánica se conocen como motores.
La transformación de energía de los motores eléctricos se logra mediante la rotación de una espira o bobinado alrededor de un campo magnético de distintas formas. Conforme al tipo de corriente en la cual operan, los motores eléctricos se clasifican en motores de corriente alterna (C.A.) o motores de corriente continua (C.C.).
Los motores de C.C. fueron dispositivos indispensables en aplicaciones donde se requerían amplias variaciones de la velocidad, sin embargo, con la miniaturización de los elementos en estado sólido, los motores de inducción se han hecho más competitivos, esto se debe a que los motores de C.C. requieren mayor mantenimiento por la existencia del conmutador y las escobillas. No obstante, los motores de C.C. no se pueden dejar de utilizar repentinamente, ya que hoy en día se encuentran funcionando en muchas aplicaciones industriales y una gran cantidad de ellos tienen una larga vida útil.
El control de velocidad de los motores de C.C., es más fácil de realizar que los controles de velocidad de los motores de C.A. Además de las técnicas convencionales de control, para este tipo de motores también se pueden aplicar técnicas de control inteligente.
especial la regulación de velocidad, por lo que en este trabajo se realizará la simulación de un control de velocidad de un motor de C.C. con excitación separada y lazo de corriente.
Existen diferentes tipos de regulación del control de la velocidad, aunque el control convencional ha dado muy buenos resultados. Como punto de partida para la regulación del control con lazo de corriente se ocupará un control convencional proporcional integral (PI) el cual utiliza la combinación de dos controles que son el control proporcional y el control integral.
La regulación de control de velocidad se realiza mediante lógica difusa, que es una lógica multivaluada, que posibilita imitar el comportamiento de la lógica humana. Al utilizar la lógica difusa es posible eliminar el uso de modelos matemáticos rigurosos y hacer arreglos de último momento dentro de un sistema de control mediante descripciones lingüísticas sencillas.
Dentro de la Lógica difusa existen dos algoritmos empleados que son: Mamdani y Takagi- Sugeno. Estos algoritmos han tenido una gran utilidad en aplicaciones reales, ya que existen actualmente avances significativos en microelectrónica y electrónica de potencia.
1.2 ANTECEDENTES
La creciente disciplina de la lógica difusa provee por sí misma un medio para acoplar estas tareas. En cierto nivel, la lógica difusa puede ser vista como un lenguaje que permite trasladar sentencias sofisticadas en lenguaje natural a un lenguaje matemático formal. Mientras la motivación original fue ayudar a manejar aspectos imprecisos del mundo real, la práctica temprana de la lógica difusa permitió el desarrollo de aplicaciones prácticas. Aparecieron numerosas publicaciones que presentaban los fundamentos básicos con aplicaciones potenciales. Esta frase marcó una fuerte necesidad de distinguir la lógica difusa de la teoría de probabilidad, tal como la entendemos ahora, la teoría de conjuntos difusos y la teoría de probabilidad tienen diferentes tipos de incertidumbre.
En 1994, la teoría de la lógica difusa se encontraba en la cumbre, pero esta idea no es nueva, para muchos estuvo bajo el nombre de lógica difusa durante 25 años, pero sus orígenes se remontan hasta 2,500 años, donde Aristóteles consideraba que existían ciertos grados de veracidad y falsedad y Platón ya había considerado grados de pertenencia.
En el siglo XVIII el filósofo y obispo anglicano Irlandés, George Berkeley y David Hume describieron que el núcleo de un concepto atrae conceptos similares. Hume en particular, creía en la lógica del sentido común, el razonamiento basado en el conocimiento que la gente adquiere en forma ordinaria mediante vivencias en el mundo. En Alemania, Immanuel Kant, consideraba que solo los matemáticos podían proveer definiciones claras, y muchos principios contradictorios no tenían solución. Por ejemplo la materia podía ser dividida infinitamente y al mismo tiempo no podía ser dividida infinitamente. Particularmente la escuela americana de la filosofía llamada pragmatismo fundada a principios de siglo por Charles Sanders Peirce, cuyas ideas se fundamentaron en estos conceptos, fue el primero en considerar ''vaguedades'', más que falso o verdadero, como forma de acercamiento al mundo y a la forma en que la gente funciona.
En un artículo de 1937 que apareció en Philosophy of Science, Max Black, un filósofo
quántico, aplicó esta lógica multivaluada a listas (o conjuntos) y dibujó el primer conjunto de curvas difusas, llamándoles vague sets (conjuntos inciertos). Veinte años más tarde, el
Dr. Lofti Zadeh, matemático iraní residente en los Estados Unidos, donde fue catedrático en el Departamento de Ingeniería Eléctrica de la Universidad de California en Berkeley, publicó un documento histórico titulado "Fuzzy Sets" (Conjuntos difusos), donde introduce el concepto de conjunto difuso dentro de la literatura técnica. En este documento, el Dr. Zadeh aplicó la lógica de Lukasiewicz sobre los estados multivaluados a todos los objetos de un conjunto y desarrolló un álgebra completa para los conjuntos difusos. Debido a este brillante trabajo, el Dr. Zadeh es considerado el padre de la lógica difusa moderna.
El rápido crecimiento del uso de la lógica difusa se debe sobre todo a la manera en que se ha entendido su significado. Anteriormente, la concepción de la lógica difusa era muy estrecha y se le consideraba como una extensión de la lógica multivaluada. Ahora tiene un sentido más amplio al asociársele con la teoría de conjuntos difusos, en la cual, las clases de objetos se relacionan con límites no delineados tales que la membrecía determina su grado de pertenencia. De esta manera, puede decirse que la lógica multivaluada es una rama de la lógica difusa teniendo en canta que ambas son diferentes en sustancia.
Las primeras aplicaciones industriales de la lógica difusa se llevaron a cabo en Europa alrededor de 1975, cuando Ebrahim Mamdani y S. Assilian de la Universidad de Londres publicaron un documento titulado "An Experiment in Linguistic Síntesis with a Fuzzy Controller", donde la capacidad de un control con lógica difusa fue probada aplicando el
control a una máquina de vapor. Luego, en la Universidad RWTH de Aachen, Alemania, Hans Zimmermann utilizó la lógica difusa en sistemas con soporte de decisiones. Después de esto surgieron otras aplicaciones industriales pero con muy poca aceptación. Fue hasta alrededor de 1980 cuando la lógica difusa gano más terreno en aplicaciones con soporte de decisiones y análisis de datos, desde entonces, en Europa se han investigado y desarrollado numerosas tecnologías nuevas en lógica difusa.
A mediados de 1985 Tomohiro Takagi y Michio Sugeno proponen un nuevo modelo de control difuso, por lo que muchas compañías empezaron a interesarse e implementarlo en sus compañías.
En los 90´s se desarrollan varios trabajos con lógica difusa que nos sirvieron como antecedente para la elaboración de esta tesis:
bases de la lógica difusa y la operación de los modelos de control difuso de Mamdani y Takagi Sugeno aplicados al control de excitación de un generador síncrono.
H. M. Gerardo Celso (1997). Presenta el análisis y diseño de un control difuso de velocidad de un motor de corriente directa con excitación separada, empleando algoritmo Mamdani.
Diaz Garcia Luis M. (1999). Desarrolla una tarjeta para el control difuso de velocidad de un motor de C.C. en el cual muestra el diseño y construcción de un sistema de control de velocidad difuso para un motor de corriente directa mediante un controlador 68HC11, en donde utilizo un algoritmo tipo Mamdani. El programa determina el ángulo de disparo de los tiristores del semiconvertidor monofásico controlado por fase permitiendo variar la velocidad del motor por voltaje de armadura.
Trabajos de control de lógica difusa del siglo XXI (2000-2008)
Ramirez Trujillo Jorge (2000). Presenta un modelado y simulación de un control tipo Takagi- Sugeno para un motor de C.C. con excitación separada, empleando software Matlab.
Herrera Espinosa Javier (2003). Describe el análisis, diseño y construcción de un regulador difuso para el control en un motor de C.C. - alternador basado en los algoritmos de Mamdani y Takagi Sugeno.
1.3 OBJETIVO
Desarrollar una metodología para la sintonizar un regulador de control de velocidad de un motor de corriente directa con excitación separada y lazo de corriente.
1.4 JUSTIFICACIÓN
En las aplicaciones industriales uno de los problemas más grandes que se tienen es trabajar reguladores de estado estable, para poder realizar esto es necesario sintonizar los controles cuando el modelo emplea 1, 2 o n número de controles.
La presente tesis enfoca su importancia en buscar una metodología para sintonizar dos controles, uno de tipo convencional (PI) y otro inteligente (control difuso Takagi- Sugeno). Para llegar a ello se realizarán simulaciones en Simulink de Matlab a 2 motores de corriente directa con excitación separada de diferentes capacidades.
1.5 ESTRUCTURA DE LA TESIS
Este trabajo consta de 5 capítulos los cuales se describen a continuación:
El capítulo 1 consta de un resumen correspondiente al tema de tesis, introducción, antecedentes, justificación, objetivo, estructura y la descripción de cada capítulo de la tesis.
El capitulo 2 explica las generalidades de los maquinas rotatorias, la clasificación de los motores de corriente alterna y de corriente directa, así como modelo matemático a utilizar.
El capitulo 3 se da la descripción de los controladores convencionales y los tipos de controladores, controles difusos, los algoritmos de control difuso, definiciones básicas de la lógica difusa y la descripción de algoritmo de control a utilizar.
El capitulo 4 se muestra el diseño del algoritmo de control de velocidad tipo Takagi- Sugeno con lazo de corriente a utilizar y el detallado de los bloques que se utilizan para la simulación.
MOTOR DE C.C. CON EXCI TACI ÓN SEPARADA
Una de las características importantes de las máquinas de C.C. es que, por medio de las diferentes conexiones de sus devanados, ya sean tipo serie, derivado, compuesto y excitación separada de los campos, estas son muy versátiles. De esta forma, se pueden obtener una amplia variedad de relaciones de velocidad y par, así como características de la variación de tensión y corriente.
Actualmente, la aplicación de los sistemas de control de estado sólido, ha llegado a avanzar de tal manera que ya se manejan controladores de corriente alterna (C.A.) y que varias funciones que anteriormente eran exclusivas de motores de C.C. también se puedan realizar con motores de C.A. Sin embargo, la aplicación de los motores de C.C. sigue siendo amplia debido a que son muy eficientes, por su flexibilidad y por la sencillez de sus sistemas de control.
2.1 INTRODUCCIÓN A LA MÁQUINA DE C.C.
Previo a entrar en el tema de los motores eléctricos, se hará una breve explicación de los principios de funcionamiento y las características de éstas máquinas. Estos principios son la base del funcionamiento tanto de los motores eléctricos como para motores-generadores.
En 1831, Michael Faraday descubrió que cuando se hace algún trabajo mecánico para mover un conductor eléctrico dentro de un campo magnético, se produce una tensión que a su vez hace fluir una corriente.
Posterior al análisis de este descubrimiento se pudo establecer el principio de “inducción electromagnética”. Este principio mejor conocido como “Ley de Faraday” nos dice que:
“El voltaje inducido en una espira o bobina de un conductor es proporcional a la rapidez de cambio de las líneas de fuerza que atraviesan la bobina”. [1]
circula una corriente y se encuentra dentro de un campo magnético, tiende a desplazarse perpendicularmente a las líneas de campo magnético.
Y como complemento, la regla de Fleming (regla de la mano izquierda), que es muy útil para comprender las relaciones de comportamiento entre movimiento, el campo magnético y el flujo de corriente.
Dicho de otra manera, estas leyes explican que en el momento en que el conductor está siendo atravesado por una corriente eléctrica y que éste se comporte como un electroimán, además de que interactúa con otros campos magnéticos, éste conductor tiende a desplazarse, dando así origen al movimiento del rotor.
Las máquinas de C.C. tienen dos funciones, que son operar como generadores o como motores. Un generador de C.C. transforma la energía mecánica en eléctrica, produce una corriente continua y una tensión fija. Esta es una corriente eléctrica de C.C. que carece de las ondas bruscas de energía de los rectificadores.
Los motores de C.C. tienen una importancia creciente en la industria ya que se pueden operar a cualquier velocidad desde cero hasta su máxima velocidad de régimen y mantenerla en éste nivel de forma muy precisa.
Los motores se clasifican de acuerdo con la forma en que se conecta el campo respecto a la armadura. Éstas conexiones son de tipo serie, en el que el devanado del campo está conectado en serie con la armadura; derivado (paralelo), en el que el devanado del campo está conectado en paralelo con la armadura; compuesto (aditivo y diferencial), en el que se tiene un devanado del campo en serie con la armadura y otro en paralelo; y de excitación separada, en el que el devanado del campo está conectado a una fuente distinta a la fuente de la armadura.
2.2CLASIFICACIÓN DE LOS MOTORES ELÉCTRICOS DE C.C.
A continuación se muestra un esquema en el cual se aprecia que los motores eléctricos de C.C. se clasifican de acuerdo a la conexión interna de sus devanados:
- Serie
- Derivado - Aditivo con derivación larga Motores de C.C. - Aditivo con derivación corta
- Compuesto - Diferencial con derivación larga
- Diferencial con derivación corta - Excitación
Separada
Fig. 2.1 Clasificación de los motores eléctricos de C.C.
2.2.1 MOTORES ELÉCTRICOS DE C.C.
Los motores de corriente continua (C.C.) son los más utilizados en la industria y que se pueden encontrar en casi todo los sistemas de tracción, ya que tienen la gran ventaja de que se les puede ajustar su velocidad con dispositivos sencillos de control, así como para aplicaciones en las que se requiere un par-motor grande [1,2].
Otra característica importante de estas máquinas es que se pueden encontrar de acuerdo a la aplicación que se requiera ya que las características varían entre las diferentes formas de realizar las conexiones en sus devanados, entre las principales están: serie, derivado (shunt), compuesta (compound), excitación separada y por su construcción de imanes permanentes. Los motores con excitación separada, se caracterizan por estar desacopladas, es decir, que se tiene un control “separado” o “independiente” del flujo principal y del par electromagnético.
de la máquina. Aún con este problema, existen aplicaciones en donde las máquinas de C.C. no han podido ser sustituidas por máquinas de C.A.
Una máquina de C.C. puede funcionar ya sea como motor o como generador. El motor convierte la potencia eléctrica en potencia mecánica, en tanto que el generador transforma la potencia mecánica en potencia eléctrica y por lo tanto el generador debe de ser impulsado mecánicamente a fin de generar electricidad [2].
Puesto que el devanado de campo es un electroimán, una intensidad de corriente debe fluir a través de él para producir un campo magnético; esta corriente se conoce como corriente de excitación y se puede suministrar al devanado del campo en dos formas:
1. Puede provenir de una fuente externa independiente de C.C., en cuyo caso el motor se clasifica como de excitación separada.
2. Puede provenir de la propia conexión de la armadura del motor, en cuyo caso el motor se denomina autoexcitado.
Los motores de C.C. cuya potencia es de una fracción de caballo son ampliamente utilizados en los transportes, donde son empleados en diferentes dispositivos, como para impulsar ventiladores, calentadores, limpiadores, accionamiento de puertas, asientos y ventanas, etc.
Un motor de este tipo está básicamente compuesto por un estator (inductor) y un rotor (armadura). El estator contiene uno no más devanados por cada polo, los cuales están diseñados para llevar intensidades de corriente directas que establecen un campo magnético. La armadura, está ubicada en la trayectoria del campo del estator y cuando el devanado lleva un flujo de corriente, se desarrolla un par-motor que hace girar el motor.
Para que un motor de C.C. pueda funcionar, es necesario que pase una Intensidad de Corriente por el devanado de la Armadura. El estator debe de producir un campo magnético con un devanado tipo serie, derivado (paralelo) o bien, una combinación de ambos (compuesto), mencionados con anterioridad.
La regulación de velocidad de un motor de C.C. se puede obtener por medio de la variación del flujo del campo o del inducido por medio de la conexión de un reóstato.
En ambos casos se obtiene una amplia gama de velocidades, mientras que el motor puede desarrollar el par que se desee dentro de sus límites de funcionamiento.
Cuando se maneja este tipo de máquinas, es importante estar consciente de que pueden destruirse cuando trabajan a velocidades muy altas, o mejor dicho, a velocidades mayores a las que fueron diseñadas (régimen).
Conforme en la figura 2.1, se hace una descripción de los tipos de motores de C.C. así como de las diferentes conexiones que pueden tener sus devanados.
2.2.2 DESCRIPCIÓN DE LOS MOTORES DE C.C.
Para hacer una descripción de los motores de C.C., previamente se hará una breve descripción mecánica de ellos.
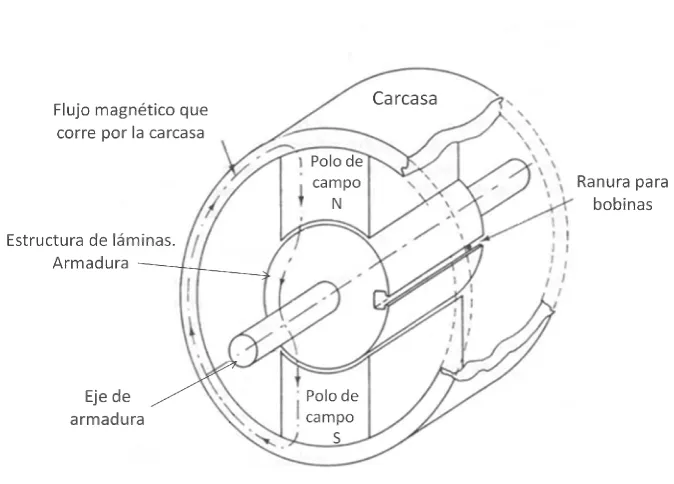
Para construir un campo magnético eficiente que permita el movimiento de rotación de la máquina, la armadura (rotor) se tiene que estructurar entorno a una estructura metálica, conformada por una serie de discos o placas metálicas, apiladas en forma cilíndrica (en forma de tambor). Dichas placas están hechas de una aleación de acero con propiedades altamente magnéticas (acero al silicio) y que están fuertemente sujetas entre sí, ya sea por medio de remaches a presión, seguros longitudinales o por el eje rotacional que las sostendrá. Esta estructura rotatoria está ranurada para contener las “bobinas de armadura”. Los polos magnéticos (campo magnético o estator), deben estar orientados hacia la superficie cilíndrica de la armadura y contar con una superficie curva que se adapta a la forma de la armadura. Estos están hechos también de placas superpuestas de una aleación de acero, unidas con remaches o presión hidráulica y se encuentran localizados dentro de la carcasa, la cual además de funcionar como soporte, cierra el campo magnético generado por las fuerzas magnéticas generadas por los polos.
Fig. 2.2 estructura física y magnética de un motor de C.C.
Cada tipo de motor tiene características de operación definidas, por lo que es necesario conocer el uso que se le dará o los requerimientos de la máquina, esto con la finalidad de hacer una elección apropiada del motor.
2.2.3 MOTOR SERIE
Fig. 2.3 Diagrama eléctrico de un motor con conexión tipo Serie.
Cuando el motor en serie está operando a plena carga el flujo por polo es igual que el de una conexión derivada, con potencia y velocidad idénticas. Pero si el valor de la carga es menor, la corriente en la armadura y el flujo también son menores.
Existe una relación entre la corriente de carga y la velocidad del motor. Si la corriente de carga del motor es menor a la nominal, el flujo magnético también disminuye, provocando un aumento en la velocidad. Por lo tanto, si la carga es nula o menor a la de régimen, el flujo se reduce en gran medida y la máquina tiende a aumentar sus revoluciones de manera peligrosa (es por eso que no se permite operar un motor serie sin carga). Por lo tanto, este tipo de motores se encuentran acoplados directamente a la carga para prevenir la sobre velocidad o “desboque”.
Los motores en serie son usados cuando se necesita de un alto par-motor de arranque. Un ejemplo es la operación de las grúas eléctricas que operan rápidamente con cargas ligeras y lentamente con cargas más pesadas.
2.2.3.1 CONTROL DE VELOCIDAD DEL MOTOR SERIE
La velocidad de un motor serie puede incrementarse colocando una reóstato en paralelo con el campo en serie, haciendo que la corriente de éste sea menor produciendo una disminución del flujo y un aumento en la velocidad.
También se puede regular la velocidad del motor de forma que ésta se reduzca. Esto se logra si se conecta un reóstato en serie a la armadura y al campo. De esta forma la caída de tensión total a través del reóstato y del campo, reducirán la tensión de la armadura, por lo que la velocidad se reduce.
Teniendo un control sobre la velocidad del motor, la eficiencia y el par también varían conforme la corriente aumenta o disminuye. Esto se puede apreciar por medio de las curvas características del motor serie. En la figura 2.5 se muestran de manera conjunta las curvas características de la corriente, eficiencia, velocidad y par del motor Serie.
Se puede observar que la velocidad disminuye al aumentar la potencia y que la corriente no aumenta tan rápido como el par.
Fig. 2.5 Curvas características del motor Serie. [1]
2.2.4 MOTOR DERIVADO
Fig. 2.6 Diagrama eléctrico de un motor con conexión en Derivación.
En este tipo de motores, conforme aumenta la carga aplicada al motor, la corriente de la armadura también aumenta y la velocidad se mantiene. La velocidad de un motor en derivación permanece de manera constante al operar sin carga y también cuando llega a plena carga.
Este tipo de motores son ampliamente usados en sistemas de transportación como elevadores y escaleras eléctricas, en los cuales se requiere de una velocidad constante sin importar la variación de la carga.
2.2.4.1CONTROL DE VELOCIDAD DEL MOTOR DERIVADO
El control de la velocidad del motor derivado se puede realizar por dos formas:
- Control de la velocidad por medio de la Armadura: este control se logra aumentando o disminuyendo la tensión de entrada en la armadura conectando un reóstato en serie con la armadura. De esta forma la corriente en el reóstato provoca una caída de tensión que se sustrae de la tensión fija de la fuente de alimentación, dando como resultado, una tensión de suministro menor a través de la armadura. Así la velocidad del motor aumentará o disminuirá proporcionalmente.
Éste método permite reducir la velocidad por debajo de la velocidad nominal (régimen). Esto sólo es recomendable para motores pequeños, ya que se desperdicia la potencia y la eficiencia total de la máquina es baja.
- Control de la velocidad por medio del Campo: Éste método se utiliza frecuentemente cuando el motor tiene que operar a velocidades que son superiores respecto a su velocidad nominal. Para controlar el flujo magnético, hay que conectar un reóstato en serie con el campo.
Al incrementar la resistencia del reóstato de campo, la corriente de excitación y el flujo magnético del campo disminuyen, entonces la corriente en la armadura será mayor. Al mismo tiempo, se generará un par-motor mucho mayor haciendo que la armadura aumente su velocidad.
Fig. 2.8 Diagrama de conexión del reóstato de control de velocidad en serie con el campo derivado en un motor Derivado.
En los motores con conexión derivada, éste método de control de velocidad permite relaciones de 3 veces la velocidad nominal (3 a 1). La característica principal de esta configuración de motores es su eficiente regulación de velocidad.
Fig. 2.9 Curvas características del motor Derivado. [1]
2.2.5 MOTOR COMPUESTO
También conocido como mixto o compound, tiene en sus conexiones tanto un campo en serie como un campo en derivación.
Fig. 2.10 Diagrama eléctrico de un motor con conexión Compuesta.
Existen dos tipos de conexiones en este motor: compuesto aditivo (integral) y compuesto sustractivo (diferencial).
máquina en derivación y no tiende a embalarse (sobre revolucionarse y destruirse) sin carga.
Cuando la carga se incrementa, la fmm del campo en serie también se incrementa pero la del campo en derivación permanece constante, por lo tanto la fmm total y el flujo por polo resultante son mayores con carga que sin carga. Coma resultado, la velocidad del motor disminuye en poca medida con el aumento de la carga, siendo que la reducción de la velocidad al estar operando en vacío y pasar a plena carga, en general va del 10 al 30%.
Fig. 2.11 Diagrama eléctrico de un motor Compuesto a) aditivo con derivación larga, b) aditivo con derivación corta.
Los motores con devanado compuesto se usan cuando el arranque de la carga es muy pesado ó cuando los cambios en la carga se dan en forma intempestiva, cómo es el caso de las bombas reciprocas y de engranajes, las máquinas de presión ó las máquinas perforadoras. En la figura 2.13, se pueden apreciar las curvas características en relación de velocidad y de par respecto a un motor Compuesto y un motor Derivado.
Fig. 2.13 Curvas de relación de velocidad de un motor Derivado y los campos de un motor Compuesto. [1]
Una característica importante en estos motores, es que si son de baja potencia, pueden estar constituidos por imanes permanentes en lugar de devanados de campo para que por medio de los imanes permanentes se pueda producir el campo magnético del estator, en sí aquellos que son alimentados por medio de baterías. Los motores de imanes permanentes proporcionan una intensidad de campo constante, con características similares a los de un motor de C.C. de campo derivado.
Si se conecta el campo en serie de modo que el flujo de corriente se oponga al del campo en derivación, se obtiene un motor compuesto sustractivo. En este tipo de motor la fmm total disminuye conforme se incrementa la carga y éste puede causar inestabilidad en la velocidad de la máquina, aumentando de forma abrupta.
El resultado de esto es que el motor compuesto diferencial no es estable y tiende a desbocarse. La inestabilidad es tan fuerte, que un motor compuesto diferencial es inadecuado para cualquier tipo de aplicación.
La siguiente tabla muestra de forma resumida las características de los motores tipo serie, derivado y compuesto así cmo algunas de sus aplicaciones en la industria.
Serie Derivado Compuesto
acumulativo Compuesto diferencial Características
Velocidad variable.
Regulación de la velocidad. Par de arranque muy
elevado.
Velocidad casi constante. Velocidad regulable. Por medio de arranque
(hasta el 150% del nominal)
Velocidad variable.
Regulación de la velocidad. Gran par de arranque.
Velocidad constante.
Bajo par de arranque.
Aplicaciones Tracción. Locomotoras eléctricas. Locomotoras diesel-eléctricas. Líneas de servicio
rápido. Trolebuses y autobuses. Grúas. Montacargas. Transportadores. Árboles de transmisión a velocidad constante. Máquinas herramienta. Ventiladores. Bombas centrífugas.
Bombas de émbolo. Trabajo de la madera. Máquinas para papel.
Máquinas de impresión.
(Demandas intermitentes de gran
par motor) Cizallas. Punzadoras.
Prensas. Aparatos de elevación.
Transportadores. Alimentadores de hogares. Laminadores. Inestable para cualquier aplicación.
Tabla 2.1 características y aplicaciones de los motores tipo serie, derivado y compuesto.
2.2.6 MOTOR DE C.C. CON EXCITACIÓN SEPARADA.
En estos motores la intensidad del campo no se afecta en forma apreciable por los cambios en la carga, de manera que se obtiene una velocidad relativamente constante. Este tipo de motores se pueden usar para la operación de máquinas que requieren una velocidad casi constante.
Las características principales de este arreglo de motores son:
- Permite la variación de tensión de campo y tensión de armadura constante.
- Los motores de C.C. con excitación separada pueden alcanzar velocidades altas peligrosas cuando se pierde la corriente de arranque de campo.
Figura 2.14. Conexión de una fuente de excitación separada a los devanados de un motor de C.C. a) fuente externa conectada a campo; b) fuente externa conectada a la armadura.
2.3 MODELO MATEMÁTICO DEL MOTOR DE C.C. CON EXCITACIÓN SEPARADA
El modelo matemático de un motor de C.C. es un grupo de ecuaciones que representan la dinámica de un motor, dichas ecuaciones se obtienen de las leyes físicas que rigen al motor.
En la figura 2.15 que se muestra a continuación, se representa esquemáticamente el modelo de un motor de C.C. con excitación separada, en donde se considera que la corriente de campo es constante. Bajo condiciones dinámicas el par electromagnético del motor puede expresarse como:
L A
e
B
T
dt
d
J
KI
T
(2.1)Donde:
K = LA1I1 es una constante
J = Jm+JL
Fig. 2.15 Motor de C.C. con excitación separada con corriente de campo constante.
Durante el estado dinámico, la ecuación de tensión del circuito de armadura del motor de la figura anterior puede darse de la siguiente manera:
dt
dI
L
I
R
KI
V
A AA A A AA
(2.2)Como el modelo es lineal, se puede emplear la técnica de la transformada de Laplace para encontrar la dinámica de este motor. Dicha técnica permite convertir las ecuaciones diferenciales en un conjunto de ecuaciones algebraicas en el dominio de la frecuencia.
Aplicando la transformada de Laplace a la ecuación 2.1 se tiene:
) 0 ( ) ( ) ( ) ( )
(s B sJ s T s j
KIA L (2.3)
Donde IA(s),TL(s) y
s son las transformadas de Laplace de IA, TL y respectivamente, similarmente la ecuación 3.2 puede expresarse en transformada de Laplace cómo:) 0 ( ) ( ) ( ) ( )
( A AA A A AA A
A s R sL I s KI s L I
Después de una manipulación algebraica de las ecuaciones 2.3 y 2.4 obtenemos: 2 ) )( ( ) )]( ( ) 0 ( [ )] 0 ( ) ( [ ) ( K sL R sJ B sL R s T J I L s V K s AA A AA A L A AA A
(2.5)
De forma similar se obtiene la ecuación para la corriente de armadura:
2 ) )( ( ) )]( ( ) 0 ( [ )] ( ) 0 ( [ ) ( K sL R sJ B sL R s T J s T J K s I AA A AA A L L
A
(2.6)
Las ecuaciones 2.5 y 2.6 describen la dinámica de un motor de C.C. considerando la corriente de campo constante. Si se considera condiciones iníciales iguales a cero, la función de transferencia que relaciona la velocidad (s) con la tensión de armadura VA (s) para un motor de corriente directa con excitación separada considerando la corriente de campo constante es:
) ( ) ( ) ( ) ( ) ( 2 2 K B R BL J R s JL s K s V s A AA A AA
A
(2.7)
Por otra parte la función de transferencia que relaciona la velocidad del motor con el par de la carga, es la siguiente:
) ( ) ( ) ( ) ( ) ( ) ( 2 2 K B R BL J R s JL s sL R s T s A AA A AA AA A
L
(2.8)
En el diagrama siguiente se muestran los bloques en donde se ve la relación de la velocidad de dicho motor con VA(s) y TL(s), cuando la corriente de campo se considera constante.
2.4 MEDICIÓN DE VELOCIDAD DEL MOTOR
Típicamente la medición de velocidad o de frecuencia en un motor, se realiza a través de un tacómetro, pero también existen aparatos como el llamado “encoder” que es un transductor de un medidor de frecuencia.
El “encoder” es un sensor de posición, estos dispositivos normalmente se instalan en la flecha del rotor y permiten el cálculo de la velocidad ó posición del rotor en un momento dado. Este consta, en su forma más simple, de un disco transparente con una serie de marcas opacas colocadas radialmente y equidistantes entre sí; de un sistema de iluminación en el que la luz es colimada de forma correcta, y de un elemento foto receptor. El eje cuya posición se quiere medir va acoplado al disco transparente. Con esta disposición a medida que el eje gire se irá generando pulsos en el receptor cada vez que la luz atraviese cada marca, y llevando una cuenta de estos pulsos es posible conocer la posición del eje, y tomando en cuenta el tiempo en el que se realizan estos pulsos, se puede conocer la velocidad mecánica del rotor.
CONTROLADORES
3.1 INTRODUCCIÓN
En el análisis y diseño de cualquier sistema de control, es esencial definir la forma en cómo se va a controlar y qué tipo de controles se utilizarán.
En los sistemas de control retroalimentados, una señal actuante (proporciona el error) se obtiene de una comparación de la señal de referencia y la señal retroalimentada. La señal actuante se usa para hacer cualquier corrección necesaria para enviar a la respuesta en correspondencia con la señal.
La acción de control se refiere a la manera en la que la señal actuante es empleada por las porciones de control del sistema para lograr una corrección. El conocimiento de las características en las diversas acciones de control es útil, para predecir la respuesta del sistema de control, especialmente en aquellos donde las funciones de transferencia para las partes del sistema que están siendo controladas son desconocidas, o bien, no están definidas.
3.2 CONTROLADORES CONVENCIONALES
En un sistema de control se compara el valor efectivo de salida de una planta con el valor deseado, para determinar la desviación y producir una señal de control que reduzca la desviación a cero o a un valor pequeño. La forma en que el control clásico produce una señal de control recibe el nombre de acción de control. [4].
De acuerdo con su acción de control se pueden clasificar los controles convencionales en:
a) Controles proporcionales b) Controles integrales
d) Controles proporcionales y derivativos
e) Controles proporcionales, derivativos e integrales.
3.2.1 CONTROL PROPORCIONAL
El control proporcional, no es más que un amplificador de ganancia ajustable. Hace más rápida la respuesta del sistema y toma la acción correctiva de manera que sea proporcional al error [6], sin embargo, al incrementar la ganancia esta puede provocar que el sistema se haga cada vez mas oscilatorio. Se expresa matemáticamente en la ecuación 3.1:
t Kpe
tU (3.1)
Donde U(t) es una cambio de variable manipulada , Kp es la ganancia de control
proporcional y e es el error, o la señal actuante.
Aplicando Laplace, la función de transferencia es:
s Kp EU
0
(3.2)
Y su diagrama a bloques es:
Fig. 3.1 Diagrama de bloque de la acción de control proporcional.
3.2.2 CONTROL INTEGRAL
Aquí se hace una corrección que es proporcional a la integral del error respecto al tiempo. Expresado matemáticamente en la ecuación 3.3:
t Kie dtt
du
Donde u(t) es una cambio de la variable manipulada, Ki es la ganancia del control integral y e es el error o la señal actuante.
Aplicando Laplace, la función de transferencia es:
SKi s E s U (3.4)
Y su diagrama bloques es:
Fig. 3.2 Diagrama de bloque de la acción de control integral.
3.2.3 CONTROL PROPORCIONAL E INTEGRAL (PI)
Las acciones de control proporcional e integral pueden combinarse para producir una corrección que es la suma de las contribuciones individuales de los dos [6]. Expresado matemáticamente en la ecuación 3.5:
t dt t e Ti kp t Kpe t U 0 (3.5)Donde: Kp es la ganancia proporcional o ganancia y Ti se denomina tiempo integral. Tanto Kp como Ti son ajustables.
Aplicando Laplace a la función de transferencia es:
STi Kp s E s U s I Kp Kp sE 1 1 (3.6)
Y su diagrama bloques es:
Fig. 3.3 Diagrama de bloques de la acción de control proporcional- integral
3.2.4 CONTROL PROPORCIONAL- DERIVATIVO
En el control derivativo se hace una corrección que es proporcional a la derivativa del error respecto al tiempo [6]. Expresado matemáticamente en la ecuación 3.7:
dt t de KpTd t
Kpe t
U (3.7)
Donde: U(t) es el cambio de variable manipulada, Kp es la ganancia proporcional, Td se
denomina tiempo derivativo.
Aplicando Laplace la función de transferencia es:
s Kp
Tds
Es U
1 (3.8)
La acción de control derivativa es a veces llamada como control de velocidad, ocurre donde la magnitud de la salida del controlador es proporcional a la velocidad de cambio de la señal de error. El tiempo Td es el intervalo de tiempo durante el cual la acción derivativa
hace avanzar el efecto de la acción proporcional.
Y su diagrama a bloques es: