INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“DETERMINACIÓN DE LOS ESFUERZOS EN DIENTES DE UNA
RUEDA TIPO CATARINA POR LOS MÉTODOS FOTOELÁSTICO Y DEL
ELEMENTO FINITO”
TESIS DE MAESTRÍA
QUE COMO REQUISITO PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS CON ESPECIALIDAD
EN INGENIERÍA MECÁNICA
PRESENTA:
ING. JORGE RODRÍGUEZ VALDEZ
DIRIGIDO POR:
M. EN C. GABRIEL VILLA Y RABASA
ÍNDICE GENERAL
PÁG. ÍNDICE GENERAL I ÍNDICE DE TABLAS V ÍNDICE DE FIGURAS Y FOTOGRAFÍAS VI RESUMEN IX ABSTRACT X OBJETIVO XI JUSTIFICACIÓN XII ANTECEDENTES XIII INTRODUCCIÓN XV
CAPÍTULO I
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1.1 TRANSMISIONES DE CADENA 2
1.1.1 Cadenas para elevación 3
1.1.2 Cadenas para transporte 3
1.1.3Cadenas de transmisión de potencia 4
1.2 RUEDAS CATARINAS 6
1.2.1 Tipos de ruedas catarinas 6
1.2.2 Características dimensionales de las ruedas catarinas 7
1.2.3 Selección de la cantidad de dientes de la catarina 11
1.3 COMPARACIÓN DE LAS RUEDAS PARA CADENAS DE RODILLOS Y LOS ENGRANES DE DIENTES RECTOS 11
1.4 PRINCIPALES FALLOS EN LAS RUEDAS PARA CADENAS DE RODILLOS 13 1.5 EXPOSICIÓN DE LA PROBLEMÁTICA A RESOLVER 16
CAPÍTULO II
CONCEPTOS DEL METODO FOTOELASTICO
2.1 GENERALIDADES 20
2.2 LUZ Y POLARIZACION 21
2.2.1 Naturaleza de la luz 21
2.2.2 Polarización de la luz 22
2.2.3 Obtención de luz polarizada plana 23
2.2.4 Obtención de luz polarizada circular 25
2.3 Aparatos Fotoelásticos 26
2.4 TEORÍA DE LA FOTOELASTICIDAD 28
2.4.1 Refracción 28
2.4.2 Birrefringencia fenómeno de aparición 29
2.4.3 Retraso relativo 30
2.4.4 Relaciones básicas de la birrefringencia en materiales. 31
2.4.5 Deducción de la fórmula fundamental de la fotoelasticidad 32
2.4.6 Familias de franjas en el método fotoelástico 33
2.4.7 Determinación del orden de franja 36
2.4.8 Método de compensación de tardy 38
2.4.9 Propiedades del material utilizado para la fotoelasticidad bidimensional 38
2.4.10 Materiales más utilizados en la fotoelasticidad bidimensional 39
2.4.10.1 Homalite 100 39
2.4.10.2 Policarbonato 39
2.4.10.3 Resinas epóxicas. 40
2.4.10.4 Goma de uretano. 40
2.4.11 Método de compensación 41
2.4.12 Paso del modelo al prototipo 41
2.5 INTERPRETACIÓN DE LOS RESULTADOS 42
2.5.1 Calibración del material 42
2.5.2 Esfuerzos en los bordes 43
2.6.1 Método de la diferencia de esfuerzos cortantes 44
2.7 Referencias 46
CAPÍTULO III GENERALIDADES DEL METODO DEL ELEMENTO FINITO 3.1 GENERALIDADES 48
3.2 ASPECTOS HISTÓRICOS 48
3.3 DISCRETIZACIÓN DEL DOMINIO 49
3.3.1 Formas básicas de los elementos 50
3.3.2 Proceso de discretización 54
3.3.2.1 Tipo de elemento 54
3.3.2.2 Tamaño del elemento 55
3.3.2.3 Ubicación de los nodos 57
3.3.2.4 Número de elementos 58
3.3.2.5 Simplificaciones por la configuración física del cuerpo y de la carga 58
3.4 ETAPAS BÁSICAS EN EL MÉTODO DEL ELEMENTO FINITO 59
3.5 PROGRAMA ANSYS 60
3.6 Referencias 61
CAPÍTULO IV DETERMINACION DE LOS ESFUERZOS DEL DIENTE APLICANDO LOS METODOS FOTOELASTICO Y DEL ELEMENTO FINITO 4.1 DETERMINACIÓN DE LOS ESFUERZOS EN EL DIENTE MEDIANTE EL MÉTODO FOTOELÁSTICO 63
4.1.1 Equipo utilizado para la prueba 63
4.1.2 Características de la rueda catarina del diente a analizar 65
4.1.3 Construcción y tipo de material de la probeta 65
4.1.5 Determinación de los esfuerzos en el diente 69
4.2 DETERMINACIÓN DE LOS ESFUERZOS EN EL DIENTE MEDIANTE EL MÉTODO DEL ELEMENTO FINITO 73
4.3 ANÁLISIS COMPARATIVO DE LOS RESULTADOS DEL MÉTODO EXPERIMENTAL y NUMÉRICO 75
CONCLUSIONES 77
RECOMENDACIONES DE TRABAJO FUTURO 78
ÍNDICE DE TABLAS
PÁG. CAPÍTULO I
N/A
CAPÍTULO II
Tabla 2.1 Longitudes de onda de luz visible 22
Tabla 2.2 Secuencia de colores producidos con luz blanca en campo oscuro 37
CAPÍTULO III N/A CAPÍTULO IV Tabla 4.1 Especificaciones de la rueda catarina 65
Tabla 4.2 Resultados de la prueba de calibración 67
Tabla 4.3 Valores de franja para algunos materiales fotoelástico 68
Tabla 4.4 Resultados del análisis experimental 76
ÍNDICE DE FIGURAS Y FOTOGRAFÍAS
PÁG. CAPÍTULO I
Figura 1.1 Cadena común para elevación 3
Figura 1.2 Cadena de travesaños 3
Figura 1.3 Cadena desmontable o de unión por ganchos 4
Figura 1.4 Cadena articulada de extremos cerrados 4
Figura 1.5 Cadena articulada de clavijas 5
Figura 1.6 Cadena de rodillos 5
Figura 1.7 Cadena silenciosa 6
Figura 1.8 Tipos de ruedas catarinas 6
Figura 1.9 Ejemplos de ruedas de hileras múltiples [1.9] 7
Figura 1.10 Vista frontal de los dientes de la rueda 8
Figura 1.11 Vista lateral de los dientes de la rueda 10
Figura 1.12 Vista longitudinal y transversal de la rueda completa 10
Figura 1.13 vista de los dientes de un engrane recto 12
Figura 1.14 Rueda desgastada por condiciones normales de trabajo 13
Figura 1.15 Efectos de una cadena demasiado tensa sobre la rueda 14
Figura 1.16 Efectos de una cadena demasiado floja en la rueda 14
Figura 1.17 Efectos de los desalineamientos de rueda y cadena 15
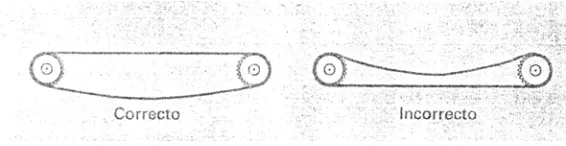
Figura 1.18 Colocación correcta e incorrecta de una transmisión horizontal 15
Figura 1.19 Colocación correcta e incorrecta de una transmisión de ejes extremadamente distanciados 15
CAPÍTULO II Figura 2.1 Ejemplos de luz no Polarizada 20
Figura 2.2 Ejemplos de luz polarizada 21
Figura 2,3 Polarización plana por reflexión 21
Figura 2.4 Polariscopio Plano 27
Figura 2.6 Efectos de la luz sobre una placa con características de doble refracción 29 Figura 2.7 Isocromáticas en campo claro y en campo oscuro en un anillo circular
sometido a compresión 34
Figura 2.8 Franjas isóclinas en un modelo de arco cargado en el centro 35
Figura 2.9 Método de compensación 41
CAPÍTULO III Figura 3.1 Elemento unidimensional 50
Figura 3.2 Elementos bidimensionales 51
Figura 3.3 Elemento cuadrilateral construido por 2 ó 4 triángulos 51
Figura 3.4 Elementos tridimensionales 52
Figura 3.5 Elementos Axisimétricos 52
Figura 3.6 Elementos parabólicos 53
Figura 3.7 Tipo de elemento para una estructura 54
Figura 3.8 Elementos sólidos para una viga cuadrada 55
Figura 3.9 Tamaño del elemento para una viga cuadrada hueca 56
Figura 3.10 Tamaños de elementos para una placa con agujero central 56
Figura 3.11 Ubicación de los nodos en discontinuidades 57
Figura 3.12 Placa con agujero en el centro con simetría geométrica y en cargas 58
Figura 3.13 placa simplificada a una cuarta parte de su geometría 59
CAPÍTULO IV Fotografía 4.1 polariscopio circular 63
Fotografía 4.2 Componentes del polariscopio modelo SSM-AJ 64
Figura 4.1 Modelado del diente 65
Fotografía 4.3 Diente finalizado 66
Figura 4.2 Datos de la placa fotoelástica 68
Fotografía 4.4 Campo de isocromáticas en el diente 69
Fotografía 4.5 Parte del diente sometida a tensión 70
Fotografía 4.6 Parte del diente sometida a compresión 71
Fotografía 4.8 Isóclinas a 20 grados 72
Figura 4.3 Mallado realizado en el diente 74
Figura 4.4 Resultados de los esfuerzos en el diente 74
RESUMEN
En la presente investigación se desarrolla el estudio del campo de esfuerzos en los dientes de una rueda tipo catarina, en la cual se pretende conocer las magnitudes de estas tensiones que se presentan después de la aplicación de una carga estática, mediante el uso de 2 metodologías: la fotoelástica y la del elemento finito.
Habiéndose obtenido las dimensiones reales se procede a realizar el modelado en Ansys para el análisis numérico, después se escalan los parámetros a unas medidas razonables con el fin de realizar una probeta fotoelástica para el análisis experimental.
Al final de las pruebas se analizan las conclusiones que los ensayos arrojaron mediante el estudio comparativo de ambos métodos con la finalidad de encontrar la diferencia en los resultados obtenidos en este trabajo.
ABSTRACT
In this project, the objective is to determinate the stress field in the sprocket’s teeth, a static load is applied on the tooth in order to find the stresses magnitudes. This work is analyzed by photo-elastic and finite element methods.
The numerical and experimental methods are described to evaluate the stress field in two cases. Also, the characteristics of the equipment are mentioned. Photoelastic pictures of the test are showed, in which the stress distribution is observed.
OBJETIVO GENERAL
Determinar la distribución de esfuerzos en los dientes de una rueda tipo catarina mediante la aplicación de una carga puntual por los métodos fotoelástico y del elemento finito
Objetivos específicos:
• Mediante la fabricación de una probeta semejante al diente en estudio, aplicar una carga estática con el fin de conocer el campo de esfuerzos que se genera mediante el desarrollo de la prueba fotoelástica.
• Por medio del modelado del diente en el programa Ansys 9.0, que es un software de propósito general para el estudio de elemento finito, calcular los esfuerzos que se generan por la aplicación de dicha carga
JUSTIFICACION
El desarrollo de esta investigación parte del hecho que los resultados que se obtengan puedan servir para el diseño de este tipo de ruedas dentadas.
Cabe mencionar que lo que motivo a este proyecto, fue una rueda catarina que sirve como elemento de transmisión de potencia para una autoclave que ayuda a la cocción del mezcal en una planta ubicada en el estado de Oaxaca, la cual actualmente se encuentra con sus dientes desgastados debido al tensado inadecuado que presenta.
Por último se busca dar continuidad a los trabajos realizados en la SEPI-ESIME-ZACATENCO con respecto al estudio de las ruedas dentadas para su óptimo funcionamiento.
ANTECEDENTES
Las ruedas dentadas son elementos que ayudan a la transmisión de potencia entre ejes. Debido al contacto continuo que experimentan sus dientes, estos sufren desgaste a determinado tiempo, por lo cual se han realizado trabajos con el fin de que estos tengan un mejor desempeño. Trabajos realizados en ruedas dentadas son los que se exponen a continuación:
Urriolagoitia [1], en 1970, realizó un análisis en los dientes de un engrane tipo novikov, en donde mediante el uso del método experimental de la fotoelasticidad y del método del elemento finito, determinó los esfuerzos que se presentaban en los dientes, obteniendo unos valores muy semejantes.
Villa [2], en su tesis de maestría del año 1992 realizada en la SEPI-ESIME-ZACATENCO trabajó con engranes rectos, con sus cálculos demostró la equivalencia de los métodos tradicionales AFNOR y AGMA para el diseño de engranes, además propuso un procedimiento para el diseño de engranes mediante el uso del MEF. Otro de los puntos que se consideraron en esta investigación fue el de la probable dirección de propagación de la fractura en el engrane, donde se llegó al resultado de que la dirección de la propagación esta definida por la curva isocromática.
Hernández [4], en 1997 en la unidad de posgrado de la UNAM, desarrolló pruebas utilizando dientes de engrane para la determinación del orden de franja, los resultados con respecto al proporcionado por el fabricante fueron muy cercanos. Estas pruebas fueron tanto ópticas, mediante el uso de la fotoelasticidad, como de instrumentación.
En 2004, Sandoval [5] en la SEPI-ESIME-ZACATENCO realizó estudios fotoelásticos y del elemento finito en engranes rectos pertenecientes a una bomba hidráulica. En sus pruebas realizadas para determinar los esfuerzos, aplicando una carga constante y una repartida, obtuvo resultados muy similares con un error menor al 10%.
INTRODUCCIÓN
La presente investigación consta básicamente de 4 capítulos, las características de estos apartados se mencionan a continuación:
En el capitulo1 se estudiarán a las cadenas y las ruedas catarinas, básicamente se verán sus tipos, características y su construcción, además se presentarán y analizarán los principales fallos en las ruedas dentadas para cadena aunado al hecho de que se expondrá la problemática a resolver en esta investigación.
En el capítulo 2 se desarrollaran los temas relacionados con el método fotoelástico, se iniciará viendo la forma en que se obtiene la luz polarizada, sus tipos y características para después estudiar los principales aparatos con que se realizan los ensayos. Una vez concluido lo anterior se parte al análisis de los temas relacionados con la fotoelasticidad tales como, las familias de franjas, la deducción de la formula que gobierna a este procedimiento, el paso del modelo al prototipo, etc. La interpretación de los resultados y la separación de la diferencia de esfuerzos, son temas con los que se concluye este apartado.
El estudio del análisis del elemento finito, es un tema que se abarca en el capítulo 3 donde se verá un poco de la historia de este método, para después conocer como se discretiza un dominio mediante el uso de estas pequeñas subregiones, conocer sus etapas básicas y además comentar brevemente el paquete Ansys que es un software orientado al uso de este método.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
CAPÍTULO I
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1.1 TRANSMISIONES DE CADENA [1.2, 1.3, 1.4]
Las cadenas junto con las bandas y engranes son las formas más comunes de transmitir potencia de un eje a otro. Este tipo de transmisiones (cadena-catarina) se utilizan por lo regular cuando el torque y/o la temperatura alcanzan magnitudes altas. Cuando la distancia entre ejes es grande la aplicación de este tipo de transmisión es también recomendable.
Otra característica básica de estas transmisiones es que su relación de velocidad es constante debido a que no presenta deslizamientos, además tienen un ciclo de vida, aunque menor que el de los engranes, de nivel aceptable y poseen la capacidad de transmitir potencia a varios ejes desde una misma fuente motriz
Las cadenas pueden clasificarse como sigue:
1. Cadena para elevación
a) Cadena común
b) Cadena de travesaños
2. Cadena para transporte
a) Desmontable o de unión por ganchos b) Articulada, de extremos cerrados
3. Cadenas de transmisión
a) Articulada, de clavijas b) De rodillos
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1.1.1 Cadenas para elevación
La forma común para la cadena de elevación es la que consiste de eslabones ovalados, tal como se muestra en la figura 1.1. El otro tipo de cadena de este tipo es la de travesaños (Ver figura 1.2) que tiene la particularidad que no se aplasta ni se enreda tan fácilmente como la cadena común.
[image:21.612.216.399.232.374.2]Figura 1.1 Cadena común para elevación
Figura 1.2 Cadena de travesaños
1.1.2 Cadenas para transporte
Como ya se comento, puede ser del tipo desmontable o de unión por ganchos, ejemplo de esta se muestra en la figura 1.3, o del tipo articulado de extremos cerrados, como la que es mostrada en la figura 1.4.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
que, la cadena entre y salga de la catarina con cierta suavidad y sin interferencia, aún después de que por alguna circunstancia sea estirada o que esta presente desgaste.
[image:22.612.169.443.276.408.2]Las cadenas de esta clase generalmente se utilizan a menudo para transmitir potencia a velocidades bajas, como en el caso de la maquinaria agrícola. Por último, cabe mencionar que estas cadenas están hechas de eslabones fundidos de hierro maleable, y carecen de las cualidades de marcha suave de las cadenas hechas más cuidadosamente.
Figura 1.3 Cadena desmontable o de unión por ganchos
Figura 1.4 Cadena articulada de extremos cerrados
1.1.3 Cadenas de transmisión de potencia
[image:22.612.197.415.456.556.2]ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
maquinadas con precisión, las partes que se desgastan están endurecidas, y corren sobre catarinas que están diseñadas cuidadosamente.
La figura 1.5 muestra una cadena articulada de clavijas. Las cadenas de este tipo se emplean para la transmisión de fuerza a velocidades relativamente bajas, así como también en un momento dado, se pueden emplear como cadenas de transporte.
Figura 1.5 Cadena articulada de clavijas
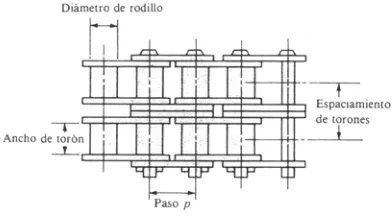
[image:23.612.204.400.484.595.2]Debido a que la cadena de rodillos es la más utilizada dentro de la industria y de que los dientes a analizar en esta investigación pertenecen a ruedas que trabajan con este tipo de cadena, se analizarán algunas características de las mismas. Está constituida por eslabones los cuales son de dos tipos: eslabones de pernos y eslabones de rodillos. La distancia lineal que existe entre los rodillos se le conoce como “paso” y el “ancho” es una medida del espacio interior entre placas de eslabón (Figura 1.6).
Figura 1.6 Cadena de rodillos
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
[image:24.612.194.425.213.313.2]Cuando se requiere transmitir cargas más pesadas de lo que es posible con cadenas de rodillos del mismo paso, o bien cuando se desee el menor grado de ruido, la cadena silenciosa es la solución normalmente utilizada (Ver figura 1.7). Este tipo de cadena no tiene rodillos, pero los eslabones están fabricados para que estos puedan engranar directamente con los de la rueda dentada.
Figura 1.7 Cadena silenciosa
1.2 RUEDAS CATARINAS [1.3, 1.5]
1.2.1 Tipos de ruedas catarinas
Las cadenas, en la transmisión de potencia, conducen y son conducidas por ruedas dentadas denominadas “ruedas catarinas”. Las ruedas dentadas de esta clase se presentan principalmente en cuatro tipos de estándares: El tipo A no tiene cubo, el tipo B tiene cubo de un lado, el tipo C presenta cubo de ambos lados y el tipo D posee un cubo desmontable, en la figura 1.8 se muestran ejemplos de estas divisiones de ruedas.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
[image:25.612.251.466.86.207.2]
TIPO C TIPO D
Fig. 1.8 Tipos de ruedas catarinas
Además de la clasificación anterior estas ruedas, estas pueden poseer hileras múltiples como se muestra en la figura 1.9, esto último dependerá del número de ramales o hileras que contenga la cadena.
Rueda con hileras dobles Rueda con hileras triples
Fig.1.9 Ejemplos de ruedas de hileras múltiples [1.9]
1.2.2 CARACTERÍSTICAS DIMENSIONALES DE LAS RUEDAS CATARINAS [1.6]
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
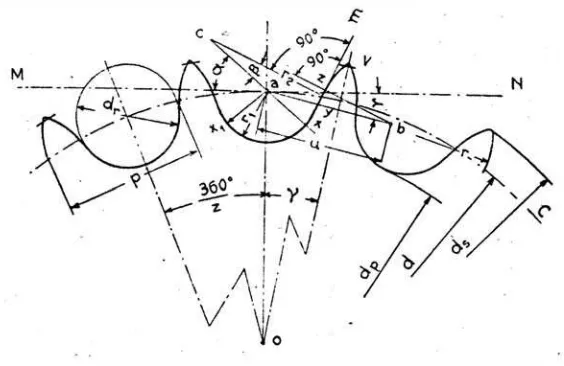
Fig. 1.10 Vista frontal de los dientes de la rueda
La explicación de los parámetros mostrados en la figura anterior (1.10) se detallan a continuación:
• Ángulo de presión α el cual esta dado por:
60 35
z
α = ° + ° (1.4)
• Ángulo del semipaso el cual se calcula mediante:
180
z
γ = ° (1.5)
• Ángulo es hallado por:
56 18
z
β = ° − ° (1.6)
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
• Diámetro del rodillo (dr)
Otros parámetros que se aprecian en la figura y que son característicos de cada rueda son los siguientes:
Paso de la cadena (p)
Es la distancia lineal entre rodillos adyacentes
Diámetro de paso (d)
Es el diámetro del círculo que pasa por los centros de los rodillos y se encuentra mediante:
( )
180 p d sen z =° (1.1)
Diámetro de la raíz (dp)
Es el diámetro del círculo que contiene a la parte inferior del espacio del diente y esta dado por:
´
p r
d = −d d (1.2)
Diámetro de exterior (ds)
Es el diámetro del círculo que encierra la parte exterior de los dientes de la rueda y se halla por la expresión:
180 0.6
s
d p ctg
z
°
⎛ ⎞
= ⎜ + ⎟
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
Radio de curvatura de la altura de la cabeza (r)
Este radio de curvatura esta comprendido desde el círculo de paso hasta el diámetro exterior de la rueda
Radio de curvatura del pie (r1)
Radio de curvatura que parte del diámetro de la raíz hasta el diámetro de paso
[image:28.612.191.426.564.688.2]Una vez analizado los dientes de la rueda en la figura 1.10, se visualizará de una manera lateral en la figura 1.11, en la cual se aprecia que en la sección A es para una fila de dientes, la B es para dos filas de dientes y C es para tres hileras de dientes.
Fig. 1.11 Vista lateral de los dientes de la rueda
Por último en la siguiente figura (1.12), se observará a la rueda completa, tanto longitudinal como transversalmente, con sus parámetros establecidos dentro de la misma:
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
Donde:
e= espesor del diente hf= altura del pie del diente
hs= altura de la cabeza del diente R= radio de curvatura del diente
1.2.3 SELECCIÓN DE LA CANTIDAD DE DIENTES DE LA CATARINA [1.7]
Con el fin de que la rueda dentada tenga una larga vida y una operación suave se recomienda que el número de dientes sea mayor a 17 pero menor a 67. En los casos en que por limitación de espacio o se esté trabajando a velocidades bajas se puede utilizar ruedas con una cantidad menor a 17 dientes. Otra recomendación es que con la selección de las ruedas, no debe de exceder de 7 la relación de velocidad.
1.3 COMPARACIÓN DE LAS RUEDAS PARA CADENAS DE RODILLOS Y LOS ENGRANES DE DIENTES RECTOS [1.8]
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
Fig. 1.13 vista de los dientes de un engrane recto
Entre las principales similitudes que hay entre los dientes de ambas ruedas, es que ambos contienen los círculos de paso, exterior y el de la raíz, también hacen referencia a una cabeza y a una raíz o pie, además de tener asociados un paso o separación entre dientes adyacentes.
Sin duda alguna la gran diferencia entre ambos tipos de dientes es el perfil los dos poseen, en la catarina el perfil esta maquinado sobre la necesidad de la adaptación del rodillo en las ranuras cilíndricas que existen entre los dientes de la rueda, por otro lado en los engranes, estos cuentan con un perfil que tiene forma de una curva conjugada de tipo evolvente, con la cual cuando dos engranes están enlazados y giran, se establece una relación de velocidad angular constante entre ellos y además la acción resultante es muy suave.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1.4 PRINCIPALES FALLOS EN LAS RUEDAS PARA CADENAS DE RODILLOS [1.1]
Las ruedas catarinas presentan distintos tipos de fallas en su geometría debido principalmente, al contacto que tienen con la cadena. Estas fallas pueden darse de las siguientes maneras:
a) Por condiciones normales de servicio
Al igual que los eslabones de la cadena, las ruedas también sufren un desgaste normal, el cual está caracterizado por la aparición de una acanaladura en el fondo del diente, de forma tal que éste adquiere la apariencia de un gancho.
La figura 1.14 muestra la zona en que se esta localizando el desgaste y el lado del diente en que se presente esta falla dependerá del sentido de giro que posea la rueda. Por último cabe mencionar que cuando la cadena está desgastada, ésta acanaladura en la rueda ocurre más cerca de la parte superior del diente.
Fig. 1.14 Rueda desgastada por condiciones normales de trabajo
b) Errores en el montaje
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1. Cuando la cadena está demasiado tensa provoca sobrecargas que pueden llevar a rupturas por fatiga o desgastes excesivos. En el caso particular de los dientes, los desgastes que se presentan no ocurren en toda la superficie del diente sino que solo son en su extremo superior (ver figura 1.15) y de no corregirlos pueden ocasionar la ruptura del diente.
Fig. 1.15 Efectos de una cadena demasiado tensa sobre la rueda
[image:32.612.249.384.219.322.2]2. Cuando la cadena está demasiado floja se presenta el fenómeno del salto de la cadena que conlleva a desgastes y a una posible ruptura (ver figura 1.16)
Fig. 1.16 Efectos de una cadena demasiado floja en la rueda
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
Fig. 1.17 Efectos de los desalineamientos de rueda y cadena
4. La colocación incorrecta del ramal tensado es otra problemática que se presenta, ésta se ejemplifica de una mejor manera en la figura 1.18, donde en una transmisión horizontal, la rotación de los dientes debe ser tal que el lado flojo se localice en la parte inferior para prevenir que la cadena se pellizque con los dientes. En la figura 1.19 donde se tiene una transmisión con ejes distanciados, al igual que en la figura 1.18, debe preverse el giro de los dientes para que debido a la separación, no se presenten fallos prematuros.
Fig.1.18 Colocación correcta e incorrecta de una transmisión horizontal
Fig.1.19 Colocación correcta e incorrecta de una transmisión de ejes extremadamente distanciados
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
c) Incorrectas condiciones de servicio y mantenimiento
Entre las principales condiciones de falla debidas a un mal servicio y mantenimiento tenemos las que se describen a continuación:
1: Sobrecargas de manera continúa o transitoria en el servicio ocasionan desgastes. 2. Velocidad de trabajo más alta de la prevista que también provocan desgastes. 3. Vibraciones exteriores elevadas que originan sobrecargas en la transmisión.
4. Sometimientos a temperaturas elevadas anormales que conducen a aumentos en el desgaste y disminuciones en la resistencia a la fatiga.
5. Fallos en los cojinetes de apoyo pueden traer un desalineamiento transitorio de la cadena y de las ruedas.
6. Defectos en el lubricante o en la mala lubricación propician desgastes.
7. Cuerpos extraños alojados entre las cadenas y en las ruedas pueden traer como consecuencia la ruptura de los mismos.
1.5 EXPOSICION DE LA PROBLEMÁTICA A RESOLVER
Presentadas las principales fallas en las ruedas para cadena, se prosigue a describir el objetivo del presente trabajo, el cual consiste en determinar el campo de esfuerzos que existe en los dientes de la rueda catarina.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
Este estudio se realizará mediante 2 métodos, uno experimental y otro numérico. El experimental es mediante el empleo de la técnica fotoélastica en la cual se diseñara un banco de pruebas que pueda ayudar a que el modelo sea sometido a las condiciones de carga explicadas en el párrafo anterior. Con respecto al modelo, éste se fabricará de forma semejante al que presenta un diente de catarina, con el fin de obtener resultados similares a los reales.
Con respecto al método numérico, se pretende realizar el estudio en el programa ANSYS, el cual es un paquete de propósito general para el análisis de elemento finito, donde se dibujará primeramente el diente para después obtener la distribución de esfuerzos que se genera debido a las cargas que se emplean sobre él.
ESTUDIO DE LAS TRANSMISIONES TIPO CADENA CATARINA
1.6 Referencias
[1.1] Calero Pérez Roque, “Fundamentos de mecanismos y máquinas para ingenieros”, ED. Prentice hall
[1.2] Shigley Joshep Edward “Diseño en ingeniería mecánica” 5ª Edición ED. MC. Graw Hill.
[1.3] Norton Robert L. “Diseño de maquinaria” 1ª Edición ED MC Graw Hill
[1.4] Aguirre Esponda Guillermo “Diseño de elementos de máquina” 1ª Edición ED. Trillas
[1.5] Orthwein William C. “Diseño de componentes de máquinas” 1ª. Edición ED. CECSA
[1.6] Gazzaniga L., “El libro de los engranajes”, Ed. Científico medica [
[1.7] Hamrock Bernard J. “Elementos de máquina” ED MC Graw Hill
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
CAPÍTULO II
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.1 GENERALIDADES
[2.1, 2.2]La fotoelasticidad es una técnica experimental para el análisis de esfuerzos y deformaciones, que resulta particularmente útil para elementos que poseen una geometría complicada, condiciones de carga complejas o ambas situaciones. En tales casos, el análisis por los métodos analíticos resulta complicado e incluso casi imposible, motivo por el cual, se puede realizar el estudio por un método experimental.
El nombre de fotoelasticidad refleja la naturaleza de este método experimental: foto implica la utilización de rayos luminosos y técnicas ópticas, mientras que elasticidad denota el estudio de los esfuerzos y deformaciones en los cuerpos elásticos.
El análisis fotoelástico además es utilizado con cierta frecuencia, cuando se necesita información sobre los esfuerzos y las deformaciones en una zona extensa de un cuerpo. Proporciona una visión cuantitativa de las áreas sometidas a grandes esfuerzos, además de mostrar las regiones donde se presentan esfuerzos de magnitud baja en las que el material está mal aprovechado (Campo completo).
En cuanto a la historia de este método, principia con los trabajos en 1816 del ingles Sir David Brewster, quién realizó estudios en un cristal sometido a esfuerzos y observó un patrón de colores los cuales fueron examinados en luz polarizada.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.2 LUZ Y POLARIZACION
2.2.1 Naturaleza de la luz [2.3]
En los tiempos de Isaac Newton se pensaba que la luz estaba solo constituida por corrientes de partículas llamadas corpúsculos, las cuales eran emitidas por fuentes de luz. Para 1665 se comenzaron a descubrir pruebas de que la luz contenía propiedades ondulatorias. Posteriormente, en 1873, James Clerk Maxwell realizó estudios acerca de la existencia de las ondas electromagnéticas y determinó la rapidez en que se propagaban. Este cálculo aunado con los experimentos de Heinrich Hertz, probaron que se podía suponer a la luz como una onda electromagnética.
A pesar de las demostraciones acerca de la naturaleza ondulatoria de la luz, esta no lo es todo. Ciertas situaciones relacionadas con la emisión y absorción de la luz prueba que la energía transportada por las ondas luminosas es depositada en paquetes conocidos como fotones o cuantos, demostrando así que la luz también tiene un aspecto corpuscular. En 1930 con el desarrollo de la electrodinámica cuántica, las propiedades ondulatorias y corpusculares acerca de la naturaleza de la luz, aparentemente contradictorias, están contempladas por esta teoría. Un planteamiento ondulatorio puede explicar la propagación de la luz y un modelo corpuscular su emisión y absorción.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
Tabla 2.1 Longitudes de onda de luz visible 400 a 440 nm Violeta
440 a 480 nm Azul 480 a 560 nm Verde 560 a 590 nm Amarillo 590 a 630 nm Naranja 630 a 700 nm Rojo .
2.2.2 Polarización de la luz
a) Luz No polarizada
La luz no polarizada es aquella que no tiene preferencia por algún modelo de vibración sea lineal, circular o elíptico, sino que es una mezcla desordenada de estos. Ejemplos de esta condición en que se manifiesta la luz son los presentados a continuación:
Figura 2.1 Ejemplos de luz no Polarizada
b) Luz Polarizada [2.4]
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
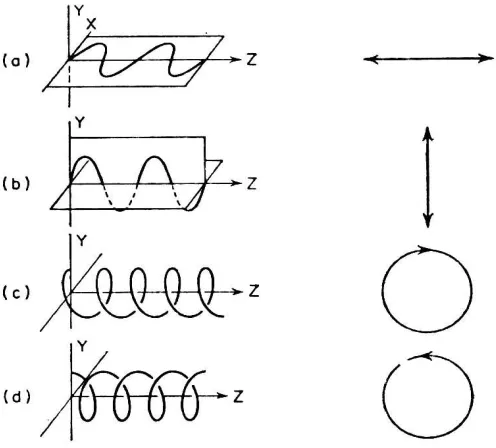
[image:41.612.176.424.219.443.2]a) linealmente en dirección horizontal b) linealmente en dirección vertical c) circularmente en sentido derecho d) circularmente en sentido izquierdo
Fig. 2.2 Ejemplos de luz polarizada
2.2.3 Obtención de luz polarizada plana [2.3, 2.4]
El método usual para producir luz polarizada cuenta básicamente de tres etapas: a) producción de luz no polarizada, b) dividirla en 2 componentes polarizadas y c) eliminar una de sus componentes. El elemento que divide el haz y separa una de ellas se conoce como polarizador.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
a) Por reflexión: Cuando se incide luz no polarizada a cierto ángulo con respecto a la normal sobre una superficie no metálica, se provoca que una parte del haz sufra refracción (Ver sección 2.3.1) y la otra reflexión, la parte del rayo que fue reflectada quedará parcial o totalmente polarizada. El único ángulo donde se presenta la total polarización es el conocido como ángulo de Brewster o ángulo de polarización (ecuación 2.1).
tanθp =n ni f (2.1)
θp= ángulo de polarización
ni = índice de refracción del medio inicial del rayo nf = índice de refracción del medio final del rayo
En la figura 2.3 se ejemplifica esta forma de polarización, donde se cuenta con una placa de vidrio la cual posee un índice de refracción de 1.5 por lo tanto su ángulo de incidencia es de 56.3°.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
b) Por cristales naturales: En ciertos cristales como el espato de Islandia (carbonato de calcio) se presenta esta condición de polarización.
c) Por filtro dicroico: Conocido también como filtro polaroid es una forma económica de obtener luz polarizada plana. Inventado por Edwin Land su fabricación empieza con la obtención de una larga hoja transparente que sea químicamente activa (por lo regular es alcohol polivinílico). Esta hoja es calentada y estirada a una longitud deseada produciendo cierta alineación en sus moléculas polímeras. Por último la hoja se sumerge en yodo provocando que los átomos del yodo se orienten en largas hileras emulando a las de su anfitrión.
Con el filtro terminado se procede a enviar luz sobre el y, a consecuencia de la conductividad del yodo, la componente paralela a las moléculas es absorbida mientras que la perpendicular atraviesa a través de ellas consiguiendo así la polarización de la luz.
2.2.4 Obtención de luz polarizada circular
La forma de obtener este tipo de luz es mediante el envío de luz polarizada plana a través de unas placas conocidas como retardadores de 90°, que por las características que la constituyen, provocan que la situación de polarización plana se convierta en circular. El funcionamiento de este tipo de placas es el siguiente:
Retardador de 90°
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
La función del retardador es la de dividir el haz incidente en 2 componentes linealmente polarizadas y retardar un de ellas un cuarto de ciclo, de tal forma que, el patrón seccional del haz emergente es un conjunto de 2 movimientos armónicos simples que se encuentran en ejes perpendiculares y que están desfasados 90° uno del otro.
Cabe mencionar que el patrón del haz combinado en la mayor parte de los casos toma una forma de elipse. Esta se convierte en círculo si se rota la placa de tal modo que sus ejes queden en las direcciones de vibración con respecto al haz incidente a +45 y -45, en esta condición las componentes presentan igual magnitud.
2.3 Aparatos Fotoelásticos [2.5]
El análisis fotoelástico, en su parte experimental, requiere de un banco fotoelástico el cual posea un dispositivo que produzca y detecte luz polarizada, el instrumento que reúne estas características es conocido como polariscopio, dicho banco requiere también un equipo que pueda someterle cargas al modelo. El polariscopio se puede encontrar en 2 tipos: Polariscopio plano y Polariscopio circular.
a) Polariscopio Plano
EL polariscopio plano es el mostrado en la figura 2.4 y está conformado por las siguientes partes:
1. Lente colimadora:
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2. Polarizador
Consiste por lo general de una placa de tipo polaroid. Su funcionamiento es el siguiente: Cuando el polarizador recibe al rayo incidente, como se explicó con anterioridad (ver sección 2.2.3), lo divide en dos componentes que oscilan en planos perpendiculares y uno de ellos es absorbido. De tal forma que la luz que sale del polarizador vibra en un solo plano.
3. Analizador
El analizador posee características similares a las del polarizador, de manera que si se posicionan de forma cruzada, es decir; con sus ejes de polarización perpendiculares entre sí, un observador colocado por detrás del analizador no podrá apreciar luz alguna (campo oscuro). Por otro lado, si los ejes de polarización del polarizador y el analizador están paralelos la luz se podrá transmitir a través de ellos (campo claro).
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
b) Polariscopio circular
Cuando se adhieren dentro del polariscopio plano dos placas de cuarto de onda (Ver sección 2.2.4) entre polarizador (P) y modelo (M) y entre modelo y analizador (A), se obtendrá un dispositivo conocido como polariscopio circular. La primer placa de cuarto de onda (λ/4) se coloca de forma tal que sus 2 ejes de polarización perpendiculares entre si, formen con el eje de polarización del polarizador un ángulo de 45°. La siguiente placa se coloca con los ejes cruzados respecto a los de la primera (figura 2.5).
Fig. 2.5 Polariscopio circular
2.4 TEORÍA DE LA FOTOELASTICIDAD
2.4.1 Refracción [2.6]
Cuando la luz atraviesa un medio para llegar a otro, parte de la luz se refleja en la frontera entre los 2 medios y el resto pasa al otro medio. SI un rayo de luz incide a cierto ángulo con respecto a la superficie, este se desviará a medida que entre al nuevo medio. Dicha desviación se le denomina “refracción”. De esta forma, el índice de refracción de un material óptico n es el cociente de la velocidad de la luz c en el vacío y la velocidad v del material expresado en la ecuación 2.2:
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
La luz se desplaza en un material con mayor lentitud que en el vacío, de manera que el índice de refracción en cualquier material es mayor a la unidad.
2.4.2 Birrefringencia fenómeno de aparición [2.7]
En ciertos materiales, el Índice de refracción varía dependiendo de las direcciones de los ejes de propagación y polarización. Por otro lado, en esos materiales, la luz polarizada es transmitida a una velocidad que será diferente a la que posee una onda polarizada en otro plano.
[image:47.612.150.461.467.678.2]Suponiendo que se tiene un rayo de luz el cual posee una polarización arbitraria y éste se incide hacia una placa de material que posee ciertas características ópticas. Con una observación cuidadosa de la placa, ésta mostrará que la luz refractada está constituida por 2 componentes que se encuentran separadas y están polarizadas en forma plana, las cuales se encuentran mutuamente perpendiculares y están desfasadas una con respecto de la otra. Esto último es debido a que las componentes pasan a través de la placa a distintas velocidades (ver figura 2.6). Esta eventualidad descrita se le conoce como birrefringencia o doble refracción
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.4.3 Retraso relativo
La diferencia de fase o retraso relativo entre los dos haces emergentes de una placa birrefringente pueden ser analizados de la siguiente forma: Teniendo que n1 y n2 son los dos índices principales de refracción de la placa y n0 es el índice de la componente de inmersión, las resultantes del retraso absoluto pueden ser obtenidos mediante las ecuaciones 2.3 y 2.4:
(
1 0)
10
n n d
R
n
−
= (2.3)
(
2 0)
20
n n d
R
n
−
= (2.4)
Donde “d” es el espesor de la placa
Ahora para calcular la diferencia de fase, que está expresada como una distancia, es simplemente la resta entre los retrasos absolutos. Por lo que el retraso relativo es:
1 2
R=R −R (2.5)
Por lo regular, se recomienda que R sea determinado como una fracción “N” o un múltiplo de longitud de onda (λ). Esto es mostrado a continuación:
N =R λ (2.6)
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.4.4 Relaciones básicas de la birrefringencia en materiales.
En algunos materiales la birrefringencia ocurre naturalmente. Ejemplos son la calcita y el nitrato de sodio. Estos materiales son usados en la construcción de polarizadores de tipo birrefringente como es el prisma de Nicol. En otra amplia clase de materiales, la birrefringencia puede ser ocasionada por esfuerzo o deformación. Ejemplos donde se presenta es en cristales o en ciertos plásticos.
Teniendo que σ1 y σ2 son los esfuerzos principales en una placa bidimensional construida de un material de características linealmente elásticas, algunos experimentos mostraron lo siguiente:
a) Los ejes principales de refracción corresponden con los ejes de esfuerzos principales.
b) Cada índice de refracción principal es una función lineal de las dos componentes de esfuerzos.
El retraso absoluto puede ser expresado en términos de los esfuerzos mediante el uso de los coeficientes fotoelásticos absolutos C1 y C2; Recordando que “d” es el espesor de la placa, las ecuaciones de las componentes del retraso absoluto que se obtienen son las siguientes (2.7 y 2.8):
(
)
1 1 1 2 2
R = Cσ +Cσ d (2.7)
(
)
2 2 1 1 2
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
Ahora para determinar el retraso relativo, sustituiremos las expresiones anteriores (2.7 y 2.8) en la ecuación 2.5 obteniendo:
(
)(
)
1 2 1 2 1 2
R=R −R = C −C σ σ− d (2.9)
Cabe mencionar que los coeficientes fotoelásticos absolutos no son comúnmente usados, pero estos ayudan a definir a una constante empírica Cσ denominada coeficiente óptico de esfuerzo. Esto se ve mostrado a continuación:
1 2
Cσ =C −C (2.10)
Finalmente, sustituyendo la fórmula anterior (2.10) en la ecuación 2.9, se encontrará una forma más simple para determinar el retraso relativo.
(
1 2)
R=Cσ σ σ− d (2.11)
2.4.5 Deducción de la fórmula fundamental de la fotoelasticidad.[2.5]
Despejando la ecuación 2.11, en términos de la diferencia de esfuerzos principales:
(
1 2)
R C dσ
σ σ− = (2.12)
Con la expresión 2.6, de la cual se despeja en términos de R y se sustituye en la anterior (2.12):
(
1 2)
N C dσ
λ
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
Agrupando la longitud de onda y el coeficiente óptico de esfuerzos se determinará una constante conocida como valor de franja:
f C
σ λ
= (2.14)
Para finalmente obtener la expresión fundamental de la fotoelásticidad:
(
1 2)
Nf d
σ σ− = (2.15)
2.4.6 Familias de franjas en el método fotoelástico [2.2, 2.8]
En los espectros fotoelásticos se pueden obtener dos clases de franjas: las franjas isocromáticas y las franjas isóclinas, a continuación se describen éstas cada una con más detalle:
a) Franjas isocromáticas
Las franjas isocromáticas son el lugar geométrico de los puntos en que se tiene la misma diferencia de esfuerzos principales. Estas líneas isocromáticas, proporcionan el valor del orden de franja en toda la extensión del modelo y se pueden determinar por medio de la ecuación 2.15.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
fotografía coincidirían con las de la otra. La figura 2.7 muestra la combinación de los espectros, tanto en campo claro como en oscuro.
[image:52.612.200.413.190.401.2]
Fig. 2.7 Isocromáticas en campo claro y en campo oscuro en un anillo circular sometido a compresión
b) Franjas isóclinas
Las franjas isóclinas son el lugar geométrico de los puntos que tienen la misma inclinación de los esfuerzos principales. En la figura 2.8(a) se muestra una imagen fotoelástica obtenida en un polariscopio plano. En ella se tiene a una isóclina de cero grados y al conjunto de bandas isocromáticas. Evidentemente la imagen resulta ambigua, puesto que no se puede distinguir la curva isóclina de las isocromáticas.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
polarizador y analizador, hay una extinción para todas las longitudes de onda y la isóclina será siempre negra. La figura 2.8 (b) muestra la misma isóclina de cero grados pero fotografiada con luz blanca.
(a) (b)
[image:53.612.71.544.170.540.2](c) (d) Fig. 2.8 Franjas isóclinas en un modelo de arco cargado en el centro. (a) y (b) a 0°,
(c) a 10° y (d) a 20°
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
determinar las direcciones de los esfuerzos principales, en los puntos del modelo, se deben registran las franjas isóclinas para sucesivas posiciones angulares del polarizador y analizador perpendiculares.
En las figuras 2.8(c) y 2.8 (d) se muestran imágenes de las isóclinas tomadas con el polarizador y analizador cruzados girados a 10 y 20°. Normalmente, las curvas isóclinas se dibujan en papel translúcido, directamente de la pantalla de la cámara, para incrementos de giro de 5 a 10°, ya que no están justificadas fotografías para muchos incrementos.
2.4.7 Determinación del orden de franja [2.9]
Los métodos empleados para determinar el orden de franja que se presenta en los materiales con recubrimiento birrefringente depende de la calidad del recubrimiento y de la exactitud requerida en el análisis. Consecuentemente, si la respuesta ofrecida por el recubrimiento es extensa (4 o más franjas), la luz monocromática puede ser usada para obtener fotografías de los patrones de franjas isocromáticas tanto en campo claro como en campo oscuro. Por otro lado, si el patrón de franjas exhibido está entre 2 ó 4 franjas, una solución podría ser el uso del patrón de colores que se producen con la luz blanca. Este conjunto de colores es el resultado de la atenuación y extinción de 1 ó más colores del espectro de este tipo de luz.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
Tabla 2.2 Secuencia de colores producidos con luz blanca en campo oscuro
Color Retraso,nm Orden de franja Negro 0 0
Gris 160 0.28 Blanco 260 0.45 Amarillo 350 0.60 Naranja 460 0.79
Rojo 520 0.90 1ª franja de paso 577 1.00
Azul 620 1.06 Azul-verde 700 1.20 Verde-amarillo 800 1.38
Naranja 940 1.62 Rojo 1050 1.81 2ª franja de paso 1150 2.0
Verde 1350 2.33 Verde-amarillo 1450 2.50
Rosa 1550 2.67 3ª franja de paso 1730 3.0
Verde 1800 3.10
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.4.8 Método de compensación de tardy
Este método tiene como principal característica, que no requiere de ningún equipo adicional más que el uso del polariscopio para obtener el valor del orden de franja en un punto del modelo. El mecanismo consiste en alinear los ejes de polarización con los ejes de esfuerzo principal y trabajando en campo oscuro, se procede a rotar únicamente al analizador hasta que el punto analizado coincida con una franja de paso. Una vez que se tiene lo anterior el valor de orden de franja N se calcula mediante la siguiente ecuación (2.16):
180
N = ±n γ D (2.16)
Donde:
n = orden de franja de paso cercano
γ = ángulo de giro del analizador
2.4.9 Propiedades del material utilizado para la fotoelasticidad bidimensional
Uno de los factores más importantes del método fotoelástico, es la selección de un material apropiado para el modelo a analizar. Desafortunadamente, un material ideal no existe, por lo que se debe de elegir de una lista de polímeros disponibles al que mejor se ajuste a las necesidades de la prueba.
La siguiente lista nos muestra las propiedades que un material fotoelástico tiene que poseer.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
1. Ser transparente con respecto a la luz empleada en el polariscopio
2. Presentar sensibilidad con respecto a los esfuerzos y a las deformaciones
3. Poseer características de linealidad con respecto a las propiedades de esfuerzo- deformación y a las del orden de franja.
4. Poseer isotropía y homogeneidad ópticas 5. No exhibir comportamiento viscoelástico 6. Tener un alto módulo de elasticidad
7. Poderse maquinar por los métodos convencionales 8. Ser libre de esfuerzos residuales
9. Estar disponible a un precio razonable
2.4.10 Materiales más utilizados en la fotoelasticidad bidimensional [2.9]
2.4.10.1 Homalite 100
El homalite 100 es una resina poliéster la cual se vacía entre dos placas de vidrio para construir hojas muy largas. El material posee las características de estar libre de esfuerzos residuales, la superficie de las hojas son de buena calidad óptica y puede maquinarse con el router.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.4.10.2 Policarbonato
Es un polímero duro y dúctil el cual fluye antes de la fractura. Es elaborado por medio de extrusión y está disponible en grandes hojas que poseen buenas características superficiales, lamentablemente la extrusión produce en las hojas una situación de birrefringencia residual. Para eliminar la problemática anterior se recomienda realizar un templado de tiempo extendido.
Este material presenta también entre sus propiedades, un alto índice de sensibilidad, un grado bajo de deslizamiento a temperatura ambiente y es relativamente libre de efectos de envejecimiento.
2.4.10.3 Resinas epóxicas.
Las resinas epóxicas son producto de la condensación de epiclorohidrin y un fenol polihídrico. Estas resinas se caracterizan como materiales frágiles, y son más fáciles de maquinar que el poliéster y los policarbonatos. Muchos de los epóxicos son menos sensibles que los policarbonatos, pero poseen mejor sensibilidad óptica que el Homalite 100.
Este material presenta deslizamiento, aproximadamente de la misma cantidad que un Homalite 100 o policarbonato. Aunque es susceptible a efectos del envejecimiento, la velocidad de difusión de agua dentro de la resina es suficientemente alta que permite una saturación en más o menos 2 meses.
2.4.10.4 Goma de uretano.
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
Para finalizar se mencionará que este material presenta muy poco deslizamiento óptico o mecánico y que puede ser maquinado también con el router.
2.4.11 Método de compensación
Este procedimiento se realiza mediante la colocación de un instrumento conocido como compensador a través de la trayectoria óptica próxima al modelo, esto se ve reflejado en la figura 2.9. El elemento activo del compensador consiste normalmente en una cuña de un cristal con birrefringencia permanente, que se traslada sobre cualquier punto del modelo hasta la compensación, es decir, anulación del retraso relativo. La simple cuña y el compensador Babinet-Soleil son ejemplo de este tipo de instrumentos.
fig. 2.9 Método de compensación
2.4.12 Paso del modelo al prototipo [2.2]
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
las propiedades físicas del material, excepto claro, que el material sea homogéneo e isótropico.
Un modelo debe ser geométricamente semejante al prototipo pero no necesariamente del mismo tamaño; las cargas deben de estar distribuidas de forma semejante, pero pueden diferir en magnitud a través de un coeficiente de proporcionalidad.
Supuesto lo anterior, los esfuerzos en el modelo y en el prototipo satisfacen la siguiente ecuación (2.16):
P m m p m
m p p
P a d P a d
σ =σ (2.17)
Donde:
P m
P P es el factor de escala de la carga m p
a a es el factor de escala de una dimensión cualesquiera m p
d d es el factor de escala del espesor El subíndice “m” pertenece al modelo y “p” al del prototipo
2.5
INTERPRETACIÓN DE LOS RESULTADOS
[2.5]2.5.1 Calibración del material
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
(
1 2)
d f
N
σ σ−
= (2.17)
Por último se puede mencionar que normalmente se cortan barras para la calibración de la misma lámina o placa del material fotoelástico de la probeta a estudiar y realizándose también con la misma fuente luminosa del ensayo, ya que f está en función del material del modelo y de la longitud de onda de la luz utilizada.
2.5.2 Esfuerzos en los bordes
La magnitud de
(
σ σ1− 2)
puede obtenerse como ya se comento, en cualquier punto delmodelo mediante la obtención del campo de las isocromáticas. Sin embargo, en determinados puntos es posible calcular los valores por separado de los esfuerzos principales, como es el caso de los puntos del contorno donde una de ellas es nula y la otra, según la ecuación 2.15 será:
Nf
d
σ = (2.18)
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.6
MÉTODOS DE SEPARACIÓN DE ESFUERZOS PRINCIPALES
[2.9]2.6.1 Método de la diferencia de esfuerzos cortantes
Se basa en la integración numérica de las ecuaciones diferenciales de equilibrio (2.19), las cuales se presentan a continuación:
0
yx xx zx
x
F
x y z
τ
σ ∂ τ
∂ + +∂ + =
∂ ∂ ∂ ; 0
xy yy zy y
F
x y z
τ σ τ
∂ ∂ ∂
+ + + =
∂ ∂ ∂ ; 0
yz xz zz
z
F
x y z
τ
τ ∂ σ
∂ + +∂ + =
∂ ∂ ∂ (2.19)
para problemas de esfuerzo plano se pueden reducir a:
0 yx x x y τ σ ∂ ∂ + =
∂ ∂ ; 0
y xy
y x
σ τ
∂ ∂
+ =
∂ ∂ (2.20)
donde las componentes normal y tangencial del esfuerzo en cualquier punto del modelo están asociadas con σ σx, y y τxy respectivamente. Después estas ecuaciones (2.20), mediante la integración ya mencionada, se transforman en:
( )
0yx x x dx
y τ σ = σ − ∂ ∂
∫
;( )
0 xy y y dyx τ
σ = σ − ∂
∂
∫
(2.21)y las cuales pueden aproximarse de forma numérica por:
( )
0yx
x x x
y τ σ = σ − Δ Δ Δ
∑
;( )
0 xyy y y
x τ
σ = σ − Δ Δ
Δ
∑
(2.22)En las expresiones anteriores, los términos
( )
σx 0 y( )
0
y
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
proceso de integración. Usualmente, los puntos seleccionados son los que aparecen en los bordes debido a que ahí, como ya se explico con anterioridad, uno de los esfuerzos vale cero y con la información isocromática se puede empezar a realizar dicho cálculo.
El parámetro τxy puede obtenido en cualquier punto interior del modelo mediante la expresión (2.23): (2 ) 2 xy Nf sen d
τ = θ (2.23)
Una vez conocido uno de los valores, por ejemplo el de σx, el valor de σy puede obtenerse mediante:
(
1 2)
cos(2 )y x
σ =σ − σ σ− θ (2.24)
Por último mediante el uso de la siguiente expresión (2.25), se obtienen los valores por separado de los esfuerzos principales:
(
)
(
)
(
)
1 2 1 2
1 1
,
2 x y 2 x y 2
Nf d
CONCEPTOS DEL MÉTODO FOTOELÁSTICO
2.7 Referencias
[2.1]Juvinall, Robert, “Engineering considerations of stress, strain and strength”, ed. MC Graw Hill
[2.2] Tuppeny, W., “Análisis experimental de tensiones”, 1ª edición, Ediciones URMO [2.3]Sears Francis W., “Física universitaria Vol. 2”, 9ª edición, ED. Addison Wesley [2.4]Shurcliff William A., “Luz polarizada”, 1ª edición, ED. Reverte mexicana
[2.5]Ortiz Berrocal Luis, “Elasticidad”, 3ª edición, ED. Mc.Graw Hill
[2.6]Giancoli Douglas C., “Física principios con aplicaciones”, 4ª edición, ED. Prentice Hall
[2.7] Cloud, Gary, ”Optical methods of engineering analysis”, 1ª edición, Cambridge university press
[2.8] Durelli, A. “Aplicaciones del análisis de esfuerzos”, ED. Prentice may
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
CAPÍTULO III
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
3.1 GENERALIDADES
[3.1]El método del elemento finito ha llegado a ser una herramienta poderosa en la solución numérica en un amplio número de problemas de ingeniería. Las aplicaciones van desde el análisis de esfuerzos y deformaciones en automóviles, aeronaves, edificios y estructuras de puentes hasta el análisis en los campos de flujo de calor, de fluidos, magnético, filtraciones, etc.
Con los avances en la tecnología de las computadoras y de los sistemas CAD, pueden modelarse problemas complejos con relativa facilidad. En una computadora pueden probarse varias configuraciones alternas con diversas configuraciones alternas antes de construir el prototipo. Todo esto sugiere que se debe modernizar empleando estos desarrollos para entender la teoría básica, las técnicas de modelado y los aspectos computacionales del método del elemento finito.
En este método de análisis, una región compleja continua se discretiza en formas geométricas simples llamadas elementos finitos. Un proceso de ensamble de estos elementos, cuando se consideran debidamente las cargas y restricciones, da lugar a un conjunto de ecuaciones. La solución de esas ecuaciones da los desplazamientos nodales. A partir de esto se encuentran las deformaciones unitarias. Empleando las relaciones constitutivas se evalúan los esfuerzos y con las teorías de falla se determinan las condiciones de falla.
3.2 ASPECTOS HISTÓRICOS
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
En los primeros años de la década de 1960, los ingenieros usaron el método para obtener soluciones aproximadas en problemas de análisis de esfuerzos, flujo de fluidos, transferencia de calor y otras áreas. A finales de la década de 1960 y principios de la siguiente, el análisis por elemento finito se aplicó a problemas no lineales y de grandes deformaciones.
Las bases matemáticas se fijaron en la década de 1970. Nuevo desarrollo de elementos, estudios de convergencia y otras áreas afines pertenecen a esta categoría. Actualmente, los avances en las computadoras y la disponibilidad que estas presentan, han puesto a este método al alcance de estudiantes e ingenieros que trabajan en industrias pequeñas.
3.3 DISCRETIZACIÓN DEL DOMINIO
[3.2]En la mayoría de los problemas de ingeniería, se requiere hallar los valores de un campo variable, tales como desplazamientos, esfuerzos, temperatura, presión y velocidad, como una función de las coordenadas espaciales (x, y, z). Asimismo, en el caso de los problemas de estado transitorio, el campo variable tiene que ser hallado en función tanto de coordenadas (x, y, z) como del tiempo.
El primer paso del análisis del elemento finito comprende la discretización del dominio en pequeños subdominios denominados elementos finitos.
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
3.3.1 Formas básicas de los elementos
Las formas, tamaños, números y configuraciones de los elementos tienen que ser escogidos cuidadosamente, ya que deben de ser lo más semejantes al cuerpo analizado, para no incrementar el tiempo computacional de la solución. La mayoría de las selecciones del tipo de elemento es dictaminada por la geometría del cuerpo y por el número de coordenadas independientes necesarias para describir el sistema.
Si la geometría, propiedades del material y el campo variable del problema pueden ser descritas en términos de una sola coordenada espacial, se pueden utilizar elementos lineales o unidimensionales como el mostrado en la figura 3.1(a). La distribución de temperatura en una barra, la presión distribuida en una tubería y la deformación de una barra por carga axial son ejemplos que pueden ser modelados mediante el uso de estos elementos.
Cabe mencionar que aunque estos elementos poseen una sección transversal, ellos pueden ser analizados como un elemento lineal (figura 3.1 (b)). Para un análisis simple, a los elementos unidimensionales se les colocan 2 nodos, uno en cada extremo, con el correspondiente valor de campo variable escogido como incógnita.
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
Cuando la configuración y otros detalles del problema puedan ser descritos en términos de 2 coordenadas espaciales independientes, se pueden usar los elementos mostrados en la figura 3.2.
Figura 3.2 Elementos bidimensionales
El elemento básico utilizado para el análisis bidimensional es el elemento triangular. Mediante la unión de 2 ó 4 elementos triangulares se puede construir el elemento cuadrilateral (ó sus otras derivaciones el rectángulo y el paralelogramo), como se aprecia en la figura 3.3.
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
Sí la geometría, propiedades del material y otros parámetros del cuerpo pueden ser descritos en tres coordenadas espaciales independientes, la región puede modelarse mediante el uso de elementos tridimensionales como los que se muestran en la figura 3.4. Cabe decir que el elemento básico tridimensional es el tetraedro.
Figura 3.4 Elementos tridimensionales
Algunos problemas, que son tridimensionales, pueden ser descritos en una ó dos coordenadas independientes. Tales problemas pueden ser analizados mediante el uso de elementos axisimétricos, como los que se presentan en la figura 3.5.
[image:70.612.190.420.163.367.2]
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
[image:71.612.71.541.203.527.2]Para los problemas de discretización que poseen curvas en su geometría, los elementos parabólicos son una solución. Los elementos típicos de esta clase son los que se observan en la figura 3.6.
Figura 3.6 Elementos parabólicos
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
3.3.2 Proceso de discretización
Las múltiples consideraciones para realizar el proceso de discretización están expuestas a continuación:
3.3.2.1 Tipo de elemento
Frecuentemente el tipo de elemento para ser utilizado será, evidentemente, de acuerdo con el problema físico en cuestión. Por ejemplo, si el problema involucra el análisis de una estructura bajo ciertas condiciones de carga como la de la figura 3.7(a), el tipo de elemento para modelar la situación es obviamente el elemento línea o barra como se observa en la figura 3.7 (b).
(a).Estructura original (b).Idealización utilizando elementos barra
[image:72.612.88.535.329.522.2]
Figura 3.7 Tipo de elemento para una estructura
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
[image:73.612.103.534.109.312.2](a).Viga Original (b) Idealización utilizando elementos tridimensionales.
Figura 3.8 Elementos sólidos para una viga cuadrada
De cualquier forma, en algunos casos, el tipo de elemento para ser empleado en el modelado, puede no ser evidente, por lo que se debe escoger en base al juicio o a la experiencia de la persona que realiza el estudio.
3.3.2.2 Tamaño del elemento
GENERALIDADES DEL MÉTODO DEL ELEMENTO FINITO
Para el caso del análisis de esfuerzos de una viga cuadrada hueca, como la que se ilustra en la figura 3.9 (a), el tamaño de todos los elementos puede ser aproximadamente del mismo tamaño (Figura 3.9 (b)). Pudiendo ser en este caso elementos tipo cascarón.
[image:74.612.87.529.165.335.2](a). Viga original (b) Idealización en elementos finitos.
Figura 3.9 Tamaño del elemento para una viga cuadrada hueca
Algunas veces, se pueden utilizar elementos de diferentes tamaños en el mismo cuerpo. Un ejemplo de esta situación es el presentado en la figura 3.10 (a), donde se realiza un análisis de esfuerzos en una placa a tensión con un agujero en el centro, para su modelado, se pueden usar elementos de distintos tamaños como los empleados en la figura 3.10 (b).
(a). Placa original (b). Idealización utilizando diferentes tamaños
[image:74.612.83.533.525.645.2]