INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
DISEÑO DE UNA PLANTA VIRTUAL DE UN
INTERCAMBIADOR DE CALOR EN MATLAB, CON
ENLACE AL SISTEMA DE CONTROL FREELANCE
.T E S I S
QUE PARA OBTENER EL TÍTULO DE INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A
NATIVIDAD RODRÍGUEZ ERIK TOVAR LEÓN HÉCTOR
ASESORES: ING. RICARDO HURTADO RANGEL DR. IGNACIO CARVAJAL MARISCAL
RELACIÓN DE FIGURAS ... 1
OBJETIVO GENERAL ... 1
OBJETIVOS PARTICULARES ... 1
ANTECEDENTES ... 2
JUSTIFICACIÓN ... 3
CAPÍTULO 1 MARCO TEÓRICO ... 4
1.1 LABORATORIOS VIRTUALES... 4
1.2 INTERCAMBIADORES DE CALOR ... 7
1.2.1 Procesos de transferencia de calor ...7
1.2.2 Mecanismos de transferencia de calor y Ley de enfriamiento de Newton ...9
1.2.3 Conductividad Térmica (W/m °C) ...10
1.2.4 Coeficiente Global de Transferencia de Calor (Kw/°C m2) ...10
1.2.5 Área de Transferencia de Calor (m2) ...10
1.3 GENERALIDADES DE LOS TIPOS DE INTERCAMBIADORES DE CALOR ... 10
1.4 TIPOS DE INTERCAMBIADORES DE CALOR ... 15
1.5 CONCEPTO DE OPC... 17
CAPÍTULO 2 MODELADO Y SIMULACIÓN EN MATLAB ... 22
2.1 INTRODUCCIÓN AL MODELAMIENTO DEL INTERCAMBIADOR DE CALOR ... 22
2.1.1 Control en lazo abierto ...24
2.1.2 Control retroalimentado ...25
2.2 CARACTERÍSTICAS Y DESCRIPCIÓN DEL INTERCAMBIADOR DE CALOR MODELADO .. 27
2.2.1 Descripción del Proceso ...27
2.2.2 Consideraciones de funcionamiento y diseño del intercambiador de calor tipo serpentín. ...28
2.3 MODELO MATEMÁTICO DEL PROCESO... 28
2.3.1 Balance de energía ...28
2.3.2 Balance de energía en el intercambiador ...29
2.3.3 Balance de energía en el serpentín ...29
2.3.4 Linealización y Transformada de Laplace ...29
2.4 PARÁMETROS DEL MODELO ... 32
2.5 CONSTRUCCIÓN DE LA SIMULACIÓN DINÁMICA EN SIMULINK ... 32
CAPÍTULO 3 INTEGRACIÓN CON FREELANCE ... 37
3.1 ASIGNACIÓN DE LA DIRECCIÓN IP DE LA ESTACIÓN DE INGENIERÍA ... 37
3.2 CREACIÓN DEL PROYECTO EN CONTROL BUILDER F... 41
3.3 INSTAURACIÓN DE UNA ESTACIÓN DE PROCESO (D-PS) ... 42
3.4 INSTAURACIÓN DEL SERVIDOR OPC ... 52
3.5 ESTACIÓN DE OPERACIÓN... 54
3.6 DECLARACIÓN DE RECURSOS ... 55
3.6.1 Componentes de la estación de operación ...56
3.6.2 Declaración de la Gateway Station OPC ...57
3.7 ASIGNACIÓN DE RECURSOS ... 57
3.8 CONFIGURACIÓN DE IP´S E ID´S ... 59
3.9 ENLACE ENTRE EL SOFTWARE CONTROL BUILDER F Y MATLAB SIMULINK ... 60
CAPÍTULO 4 DESARROLLO DE HMI PARA MONITOREO ... 68
4.1 INTEGRACIÓN DE IMÁGENES TIPO BITMAP ... 68
4.2 INTEGRACIÓN DE DISPLAY ... 71
4.3 RESULTADOS DE LA INGENIERÍA DESARROLLADA ... 81
CONCLUSIONES ... 92
GLOSARIO DE TÉRMINOS ... 93
BIBLIOGRAFÍA ... 96
APÉNDICES ... 97
APÉNDICE A MANUAL DEL CONTROLADOR PID DE COTROL BUILDER F ... 97
RELACIÓN DE FIGURAS
Figura 1.1 Flujo en un Intercambiador de Calor ... 11
Figura 1.2 Intercambiador de calor en contracorriente. ... 12
Figura 1.3 Comportamiento del intercambiador de calor en contraflujo. ... 12
Figura 1.4 Intercambiador de calor de flujo paralelo. ... 13
Figura 1.5 Comportamiento del intercambiador de calor de flujo paralelo. ... 13
Figura 1.6 Corrientes cruzadas en un intercambiador de calor ... 14
Figura 1.7 Comportamiento de un intercambiador de flujo cruzado. ... 14
Figura 1.8 Clasificación de Intercambiadores de Calor ... 15
Figura 1.9 Comparación antes y después del OPC. ... 18
Figura 2.1 Sistema en Lazo Abierto ... 25
Figura 2.2 Control Retroalimentado ... 26
Figura 2.3 Diagrama de proceso para el intercambiador de calor tipo serpentín. ... 27
Figura 2.4 Diagrama en Simulink representativo del intercambiador de calor. ... 33
Figura 2.5 Diagrama de bloques del proceso en Simulink con Bloques Scope. ... 33
Figura 2.6 Implementación del cambio de flujo programado en Simulink ... 34
Figura 2.7 Bloque PID en Simulink. ... 34
Figura 2.8 Sintonización del PID usando auto-tune. ... 35
Figura 2.9 Diagrama de bloques representativo del Intercambiador de Calor. ... 35
Figura 2.10 Gráfica de la respuesta del sistema al correr la simulación ... 36
Figura 3.1 Asignación de IP a la estación de Ingeniería. ... 37
Figura 3.2 Asignación de ID al programa Control Builder F ... 38
Figura 3.3 Asignación de ID al programa DigiVis. ... 38
Figura 3.4 Asignación de ID al Servidor OPC. ... 39
Figura 3.5 Propiedades del Protocolo de Internet (TCP/IP). ... 39
Figura 3.7 Contenido del archivo para asignación de IP estática. ... 40
Figura 3.8 Ventana generada por el archivo .bat de asignación de IP estática ... 41
Figura 3.9 Creación de un nuevo proyecto. ... 41
Figura 3.10 Creación de la estación de proceso ... 43
Figu a . Adi ió del o jeto Co Figu atio CONF . ... 43
Figu a . Adi ió del o jeto P o ess station D-P“ . ... 44
Figu a . Adi ió del o jeto Task TA“K ... 44
Figu a . Á ol de p o e to o el o jeto Ta eas ag egado ... 45
Figura 3.16 Agregando al objeto Program LIst ... 45
Figura 3.17 Agregando el subnivel de bloques funcionales FBD ... 46
Figura 3.18 Árbol de proyecto con subnivel FBD ... 46
Figu a . 9 Ag ega do el lo ue Co t olado . ... 47
Figura 3.20 Parámetros general del controlador. ... 47
Figura 3.21 Sección uno de configuración en el controlador. ... 48
Figura 3.22 Segunda sección de configuración en el controlador. ... 48
Figura 3.23 Tercer sección de configuración en el controlador. ... 49
Figura 3.24 Segunda ventana de configuración en el controlador. ... 49
Figura 3.25 Configuración del modo de operación en el controlador... 50
Figura 3.26 Agregando variables de escritura y lectura. ... 50
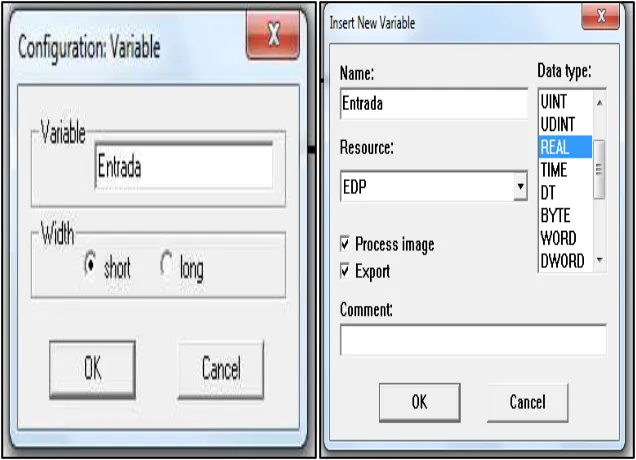
Figura 3.27 Ventana de configuración de variables. ... 51
Figura 3.28 Diagrama de bloques funcionales con controlador y variables. ... 51
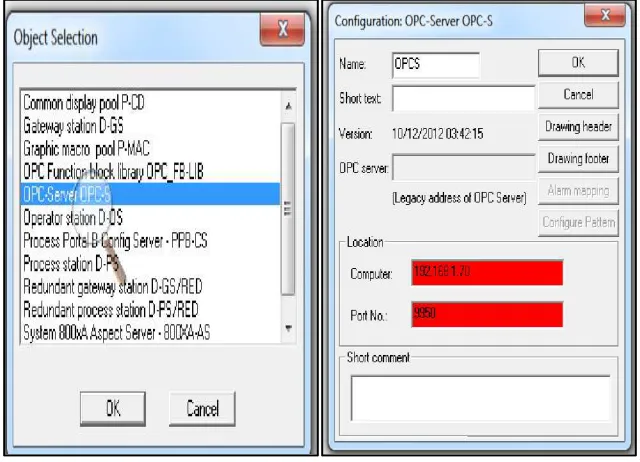
Figura 3.29 Configurando el servidor OPC. ... 52
Figura 3.30 Adició del o jeto OPC-Server (OPC-“) . ... 52
Figu a . . Adi ió del o jeto Gate a “tatio D-G“ . ... 53
Figura 3.32 Selección del tipo de Gate a “tatio D-G“ . ... 53
Figura 3.32 Árbol de proyecto con tres subniveles agregados. ... 54
Figura 3.34 Incorporación de una estación de operación (D-OS). ... 55
Figura 3.35 Árbol de proyecto con estación de proceso (D-PS) y ... 55
estación de operación (D-OS). ... 55
Figura 3.36 Declaración del emulador como estación de proceso ... 56
Figura 3.37 Declaración de la estación de operación ... 56
Figura 3.38 Declaración de la estación de enlace ... 57
Figura 3.40 Asignación de la estación de operación ... 58
Figura 3.41 Asignación de la puerta de enlace OPC. ... 58
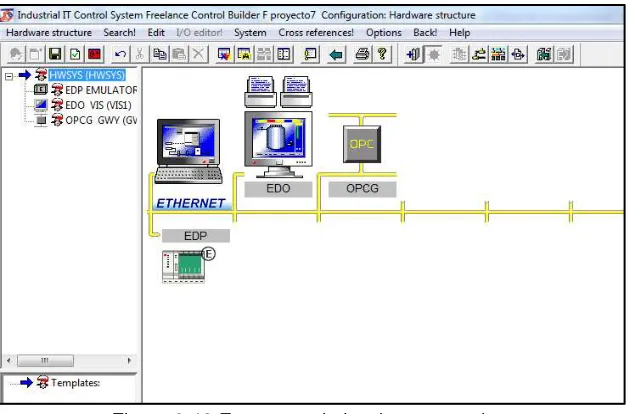
Figura 3.42 Estructura de hardware completa. ... 59
Figura 3.43 Configuración de IP´s ... 59
Figura 3.44 Revisión de errores en el proyecto. ... 60
Figura 3.45 Simulación del proceso usando Simulink. ... 60
Figura 3.46 OPC Toolbox. ... 61
Figu a . Blo ue OPC Co figu atio ... 61
Figura 3.48 Iniciando servidor OPC en Windows 7. ... 62
Figura 3.49 Reconocimiento del servidor de Control Buifer F. ... 62
Figura 3.50 Nombre del servidor de Control Builder F. ... 63
Figura 3.51 Configuración exitosa del servidor OPC en Simulink. ... 63
Figura 3.52 Configuración del Bloque Read ... 64
Figura 3.53 Configuración de enlace pa a la a ia le “alida . ... 64
Figu a . E la e e itoso de la a ia le “alida e “i uli k. ... 65
Figura 3.55 Adición del Bloque OPC Read a la simulación. ... 65
Figu a . Co figu a ió de e la e pa a la a ia le E t ada . ... 66
Figura 3.57 Enlace exitoso de la varia le E t ada e “i uli k. ... 66
Figura 3.58 Simulación del proceso de intercambio de calor con servidor OPC. ... 67
Figura 4.1 Nivel FGR en árbol de proyecto. ... 68
Figura 4.2 Imagen del intercambiador de calor para la HMI ... 69
Figura 4.3 Botón Bitmap. ... 69
Figura 4.4 Importación de imagen a Control Builder F ... 70
Figura 4.5 Creación de etiquetas tipo texto ... 70
Figura 4.6 Adición de la etiquetas de texto para el proyecto. ... 71
Figura 4.7 Adición de un display alfanumérico. ... 71
Figura 4.8 Configuración de display para la temperatura de entrada... 72
Figura 4.9 Integración de display para temperatura de la mezcla. ... 72
Figura 4.10 Acceso y creación a nuevas variables ... 73
Figura 4.12 Activación de lectura y escritura de datos ... 74
Figu a . Co figu a ió de displa pa a la a ia le VVapo ... 74
Figura 4.14 Integración de display para temperatura del vapor. ... 75
Figu a . Adi ió del Blo ue OPC W ite pa a la a ia le VVapo ... 75
Figura 4.16 Enlazado de la variable VVapor a Simulink ... 76
Figu a . C ea ió de la a ia le Flujo ... 76
Figura 4.18 Configuración de la varia le Flujo ... 77
Figura 4.19 Activación de lectura y escritura de datos. ... 77
Figura 4.20 Configuración de display para la variable Flujo ... 78
Figura 4.21 Integración de display para el cambio de flujo. ... 78
Figura 4.22 Adición del Bloque OPC Write para la variable Flujo ... 79
Figu a . Ligado de la a ia le Flujo e “i uli k... 79
Figura 4.24 Diagrama de bloques en Simulink con comunicación vía OPC integrado a la HMI. ... 80
Figura 4.25 Comprobación de errores de proyecto... 81
Figura 4.26 Consejos emergentes desplegados... 81
Figura 4.27 Iniciando el modo de comisionamiento. ... 82
Figura 4.28 Iniciando Emulador ... 82
Figura 4.29 Emulando el Freelance con ID 30. ... 83
Figura 4.30 Carga del recurso EDP ... 83
Figura 4.31 Estación de proceso en línea. ... 84
Figura 4.32 Cargando OPCG ... 84
Figura 4.33 Cargando la estación de operación EDO... 85
Figura 4.34 Carga de proyecto exitosa. ... 85
Figura 4.35 Diagrama de bloques con controlador vía OPC y controlador local en simulink. ... 86
Figura 4.36 Accediendo a la HMI en digivis. ... 87
Figura 4.37 Accediendo al manipulador del controlador. ... 87
Figura 4.38 HMI en línea ... 88
Figura 4.40 Control del Freelance sobre la temperatura de salida en el intercambiador de calor. ... 89
Figura 4.41 Control de Simulink sobre la temperatura de salida en el intercambiador de calor. ... 90
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 1
OBJETIVO GENERAL
Diseñar un emulador de un proceso de intercambio de calor en Matlab, que pueda interactuar con el sistema de control distribuido de Freelance, como parte de un laboratorio virtual.
OBJETIVOS PARTICULARES
-Desarrollar un sistema de comunicaciones entre el Freelance 800F ABB y el software MatLab.
-Analizar el control de temperatura en un intercambiador de calor en Matlab y observar el comportamiento del proceso.
-Mostrar las técnicas para el control en Matlab y la integración con el sistema Freelance 800F de ABB.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 2
ANTECEDENTES
Poner en práctica los conocimientos adquiridos sobre procesos industriales es una cuestión que a veces no resulta del todo viable debido a los altos costos generados en la adquisición y operación de los equipos en donde se realizan, los laboratorios virtuales son herramientas muy útiles en la didáctica de cualquier ciencia para trabajo donde no se cuenta con equipos útiles a disposición.
Debido al avance de la tecnología, algunos años atrás surge una nueva forma de poner en práctica lo visto en clase. Si bien es cierto, la industria utiliza procesos complejos para llevar a cabo sus operaciones de producción, es posible crear procesos virtuales donde se puede aprender virtualmente lo que físicamente quizás no esté al alcance de los estudiantes.
Poder Implementar laboratorios donde a través de un programa de computadora se pueda simular el funcionamiento de los factores más determinantes en un proceso de producción es de gran importancia para la formación de ingenieros en control y automatización. A través de las interfaces gráficas de los programas se puede visualizar el comportamiento o funcionamiento de un mecanismo, de una parte de un proceso; así que esto permite generar experiencia en un tiempo corto, y así se pueda aprender más fácilmente los pros y los contras de nuestras decisiones, asemejándose a las pruebas en la industria, que traería costos enormes. En los laboratorios virtuales se usa el concepto de simulación. Dentro de estos laboratorios hay presencia activa por parte del estudiante, a su vez, él tiene el control completo del entorno y libertad de realizar lo que se desee.
En los últimos años, se ha masificado el uso del concepto para tener experiencias simuladas y controladas haciendo uso de la tecnología. Esto permite que los estudiantes desarrollen sus competencias en la operación y programación de los modernos sistemas controlados, además hace que los estudiantes se familiaricen de manera virtual con la industria y sus procesos.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 3
JUSTIFICACIÓN
La enseñanza en la parte práctica siempre ha sido fundamental, especialmente en donde se requiere tener un conocimiento más que teórico, es decir, experimental. Las prácticas de laboratorio permiten a la persona manipular materiales, instrumentos e ideas, así como aplicar su propia investigación y originalidad. Cuando existe la dificultad de implementar un estudio de manera física, es entonces cuando se justifica la importancia de los laboratorios virtuales. Hoy en día, dichos laboratorios se usan para una amplia variedad de situaciones de ingeniería en las cuales es necesario observar los comportamientos de procesos industriales importantes que no permiten fallas por ningún motivo.
En el mercado existe una gran variedad de intercambiadores de calor, estos dispositivos además de que tienen un costo elevado también son desarrollados para propósito industrial; además es necesario que aparte del equipo se tenga una infraestructura especial para poder funcionar. Cuando se maneja un proceso donde se pretenda regular la variable temperatura es necesario que se consiga trabajar con los menores errores posibles ya que representan perdidas incuantificables; el proyecto descrito en esta tesis permitirá brindar una visión más clara de los sistemas de control. El enfoque dado a la simulación es principalmente de tipo didáctico ya que en los laboratorios de control a nivel licenciatura es indispensable conocer el funcionamiento de los sistemas de control.
En el ambiente laboral se hace cada vez más presente la competitividad entre ingenieros en control, la presente tesis parte de esta necesidad de competitividad por lo que se propone crear la simulación del control de un intercambiador de calor para probar su funcionamiento en el sistema Freelance 800F de ABB dentro de un laboratorio que no posee la infraestructura suficiente para poder contar con un proceso físico dentro del mismo. Se hará uso también de otro software, Matlab, que nos permitirá introducir el modelo del intercambiador para que después el sistema Freelance lea esa información de manera que se pueda visualizar el comportamiento del dispositivo de manera gráfica.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 4
CAPÍTULO 1 MARCO TEÓRICO
1.1 LABORATORIOS VIRTUALES
En computación el término “virtual” distingue algo que es conceptual de algo que es físicamente real y se puede utilizar en gran variedad de situaciones. Los laboratorios virtuales han sido definidos como herramientas muy útiles en la didáctica de cualquier ciencia para trabajar temas que, por razones diversas, no admiten la experimentación o implementación real.
En la industria, este concepto es utilizado desde hace poco más de treinta años para la planificación y experimentación de procesos. En el medio académico, surge a raíz de la necesidad de crear sistemas de apoyo al estudiante para sus prácticas de laboratorio, con el objetivo de optimizar el tiempo que éste emplea en la realización de dichas prácticas y la demanda de recursos de infraestructura. Como parte del presente trabajo, se usará un laboratorio virtual como forma de suplir la dificultad de adquisición del material físico necesario para el desarrollo real de la investigación de procesos de intercambio de calor.
En los últimos años ha aumentado considerablemente el uso de las nuevas tecnologías en el aprendizaje y desarrollo de prácticas, o bien, investigaciones, como es el caso de este trabajo. El laboratorio virtual es un simulador interactivo de un proceso real donde a través de la tecnología, se pueden realizar un sinfín de actividades que podrían ser difíciles de desarrollar físicamente debido a que se necesitaría tener una muy buena infraestructura para que los equipos operaran, además de tener personal capacitado para darle mantenimiento a estos equipos, el resultado de una simulación arroja datos muy cercanos a lo que se podría obtener si estuviera el proceso real, pero también se pueden identificar pequeñas deficiencias que a continuación se enlistan:
Ventajas
Se visualiza gráficamente el comportamiento de un proceso físico de forma remota.
Fomenta la capacidad de análisis, observación y pensamiento crítico del tema.
No supone gasto económico alguno por parte de los involucrados para adquirir el material físico a utilizar.
Permite al programador analizar los resultados desde la PC y en cualquier momento del día.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 5
Inconvenientes
Es necesario tener un cierto nivel de conocimiento del software a utilizar. Un laboratorio virtual proporciona un entorno simulado. Se han desarrollado muchos paquetes de software para la simulación de experimentos reales. Algunas ventajas de estos simuladores conllevan:
• Explicaciones efectivas de los conceptos teóricos. • Realización de experimentos paso a paso.
• Es un medio interactivo.
• Es flexible y con herramientas fáciles de usar.
• Es una alternativa de bajo costo.
• No existen restricciones físicas ni de tiempo.
Como se mencionó, para desarrollar un laboratorio virtual es necesario contar con el software necesario que permita implementar las condiciones necesarias en donde se lleve a cabo la simulación, y a su vez, la visualización del comportamiento del proceso, o bien, parte del proceso.
Se tienen un sinfín de software que facilitan lo anterior, sin embargo entre los software que nos permitirán llevar a cabo el presente trabajo se nombran a continuación:
Matlab
Control Builder F de ABB.
Cada uno de ellos cuenta con su forma de programación y configuración que el usuario debe conocer como parte fundamental de su uso, esto para los fines descritos en el trabajo.
1.1.1 Simulación
Una vez conociendo el programa, el proceso a desarrollar y sabiendo manejar el software, entonces se procede a llevar a cabo su simulación para su observación y análisis.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 6
los resultados deseados. En el capítulo 2 se mostrará la función que describirá nuestro proceso, y enseguida se simulará en el mismo software.
Para el caso del Control Builder F de ABB es necesario emular el comportamiento del controlador con ayuda de cualquier servidor de Internet, bajo la dirección: http://localhost:8888/, donde más adelante, en el capítulo 2 se describirá la forma de hacerlo paso a paso.
Las técnicas de simulación de procesos se fundamentan en el desarrollo y la obtención de uno o varios modelos matemáticos del sistema, que se trata de simular. El modelo, o modelos matemáticos, están constituidos por una serie de ecuaciones que representan los balances de materia, de energía y la función de transferencia, o en dado caso, la ecuación de estado del sistema. Partiendo de ese modelo, se podrá obtener información del sistema por métodos analíticos.
Una simulación se podría definir como un modelo matemático de ese proceso que reproduce su comportamiento ya sea en condiciones estacionarias (simulación estacionaria) o en condiciones no estacionarias (simulación dinámica). Tal simulación (modelo matemático), es cargada y ejecutada en el programa simulador para que este pueda realizar los cálculos de balances de materia y energía, si el software lo permite, con el objeto de obtener los resultados de simulación. Dichos resultados pueden permitir, desde el cálculo y diseño de un intercambiador de calor, hasta el desarrollo de un plan de puesta en marcha de una compleja unidad de proceso.
Con la ayuda de la simulación de procesos, se pueden optimizar las condiciones de operación de la planta, con el fin de obtener un determinado objetivo. Éste puede ser: la reducción de costos, la mejora de las calidades de los productos, la optimización energética, etc.
¿Cuándo simulamos?
Cuando es costoso, peligroso, consume mucho tiempo, o imposible de construir y experimentar con prototipos.
Hay necesidad de estudiar el pasado, presente, o futuro del sistema en tiempo real.
Las áreas de aplicación de la simulación son numerosas y entre ellas están:
• Diseño y análisis de sistemas de producción o de procesos.
• Análisis de sistemas financieros o económicos. • Diseño de sistemas de comunicación y protocolos.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 7
1.2 INTERCAMBIADORES DE CALOR
Para poder entender el proceso que se lleva a cabo dentro de un intercambiador de calor de cualquier tipo es necesario conocer los conceptos generales que envuelven su funcionamiento y así poder obtener el balance de energía que generara el modelo matemático que lo represente.
1.2.1 Procesos de transferencia de calor
La termodinámica como ciencia estudia en la primera ley, la naturaleza y transformación de la energía en sus diferentes formas: energía interna, entalpía, trabajo y calor. En la segunda ley explica porque el calor no puede ser transformado totalmente en trabajo.
La herramienta con la cual se aplican los conceptos de la primera ley de la termodinámica a los procesos industriales se denomina balance de materia y energía. Sin embargo ninguna de las dos explica cómo se transfiere el calor de un cuerpo a otro. Dicha explicación es trabajada en los Procesos de Transferencia de Calor.
Se define la Transferencia de Calor como “el estudio de las velocidades a las cuales el calor se intercambia entre fuentes de calor y receptores”, mientras que los Procesos de Transferencia de Calor están relacionados con las razones de intercambio térmico que ocurren en los equipos.
Al tratar con procesos químicos y físicos se hace necesario el conocimiento de las variables donde interactúa la energía en forma de calor, es decir se debe conocer los cambios que se producen cuando ocurre este proceso; como ejemplo de algunas variables se tiene flujo, nivel, temperatura, etc. así como también la dinámica de estas variables que podemos definir como el cambio que hay en relación de la salida con respecto a la entrada. Otro aspecto que se hace sumamente necesario es entender las leyes de la termodinámica donde de forma breve se explicarán más adelante, éstas nos ayudan a entender el comportamiento de la energía debido a una transferencia de calor. La ciencia de la transferencia de calor está relacionada con la razón de intercambio de calor entre cuerpos calientes y fríos llamados fuente y recibidor.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 8
comportamiento exacto de un proceso por medio de un modelo matemático ya que este es ideal y en el caso real existen factores que afectan su comportamiento, entonces la exactitud con la que requiera expresar un proceso por medio de su modelo matemático esta en directa relación con la complejidad de esta.
Se ha descrito a la transferencia de calor como el estudio de las velocidades a las cuales el calor se intercambia entre fuentes de calor y recibidores, tratados usualmente de manera independiente. Los procesos de transferencia de calor se relacionan con las razones de intercambio térmico, tales como los que ocurren en equipo de transferencia de calor, tanto en ingeniería mecánica como en los procesos químicos. Este enfoque realza la importancia de las diferencias de temperatura entre la fuente y el recibidor, lo que es, después de todo, el potencial por el cual la transferencia de calor se lleva a efecto. Un problema típico de procesos de transferencia de calor involucra las cantidades de calor que deben transferirse, las razones a las cuales pueden transferirse debido a la naturaleza de los cuerpos, la diferencia de potencial, la extensión y arreglo de las superficies que separan la fuente y el recibidor, y la cantidad de energía mecánica que debe disiparse para facilitar la transferencia de calor. Puesto que la transferencia de calor considera un intercambio en un sistema, la pérdida de calor por un cuerpo deberá ser igual al calor absorbido por otro dentro de los confines del mismo sistema.
Para poder entender el funcionamiento de estos procesos se hace necesario definir dos conceptos importantes; temperatura que representa la cantidad de energía térmica disponible, mientras que el flujo de calor representa el movimiento de la energía térmica a partir de un lugar a otro.
En una escala pequeña, la energía térmica se relaciona con la energía cinética de las moléculas. Cuanto mayor sea la temperatura de un material, mayor es la agitación térmica de sus moléculas constituyentes (manifestado tanto en el movimiento lineal y modos de vibración). Es natural que las regiones que contienen una mayor energía cinética molecular pasen esta energía a las regiones con menos energía cinética.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 9
1.2.2 Mecanismos de transferencia de calor y Ley de enfriamiento de Newton
Para poder llevar a cabo un intercambio de calor entre dos sistemas existen tres formas en las que se realiza, llamados Mecanismos de Transferencia de Calor. Aun cuando muchas de las aplicaciones en la ingeniería son combinaciones de dos o tres, las tres formas diferentes en las que el calor puede pasar de la fuente al recibidor, son, conducción, convección y radiación.
La transferencia de calor está íntimamente ligado a la Ley de Enfriamiento de Newton (Ec. 1.1), la cual puede enunciarse de la siguiente manera: “la temperatura de un cuerpo cambia a una velocidad que es proporcional a la diferencia de las temperaturas entre el medio externo y el cuerpo”.
= −
−
(1.1)Donde:
=
Representa la rapidez del enfriamiento,= es la temperatura instantánea del cuerpo, = una constante que define el ritmo de enfriamiento,
= es la temperatura ambiente, que es la temperatura que alcanza el cuerpo luego de suficiente tiempo, que se supone siempre constante.
Resolviendo esta ecuación diferencial para un cuerpo que se enfría desde una temperatura To hasta una temperatura T, obtenemos la temperatura del cuerpo en función del tiempo:
= −
−
∫
−= − ∫
− = − + � �− = + � �− −� (1.2) (1.3) (1.4) (1.5)INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 10
diferencia de temperaturas entre el cuerpo y dicho medio externo, siempre y cuando este último mantenga constante su temperatura durante el proceso de enfriamiento. 1.2.3 Conductividad Térmica (W/m °C)
Propiedad de cada material para conducir calor. Se define como la cantidad de calor que pasa a través de una unidad de superficie de una muestra del material de extensión finita caras plano paralelas y espesor unidad cuando entre sus caras se establece una diferencia de temperaturas igual a la unidad.
1.2.4 Coeficiente Global de Transferencia de Calor (Kw/°C m2)
Se define como la cantidad de calor total transferido por unidad de superficie ante una variación de un grado Celsius. Este valor es obtenido experimentalmente y varía de acuerdo a las características del intercambiador.
1.2.5 Área de Transferencia de Calor (m2)
Se define como el área disponible para la transferencia de calor entre los dos fluidos. Para el caso del intercambiador de calor el área efectiva es el área superficial total exterior de los tubos. Se calcula hallando el área superficial de un tubo y multiplicando el valor por el número de tubos y el número de pasos por la carcasa. 1.3 GENERALIDADES DE LOS TIPOS DE INTERCAMBIADORES DE
CALOR
Los procesos de transferencia de calor se realizan en equipos conocidos como intercambiadores de calor. Con carácter general, el intercambiador de calor es cualquier dispositivo en el que se verifica un intercambio de calor entre dos fluidos separados por una pared. Si se tiene en cuenta que cualquiera de los dos fluidos puede ser un líquido, un gas, un vapor condensable o un líquido en ebullición, el número de intercambiadores de calor es muy elevado.
El fluido caliente se denomina fuente y el frío se denomina receptor. La transferencia de calor trata de la velocidad de intercambio entre la fuente y el receptor. Aunque genéricamente se conocen como intercambiadores, los equipos utilizados para transferencia de calor se definen por la función que llevan a cabo en el proceso, clasificándose como:
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 11 • Calentador. Se utiliza fundamentalmente para calentar corrientes de proceso, generalmente con vapor de agua.
• Enfriador. Se utiliza fundamentalmente para enfriar corrientes de proceso, generalmente con agua.
• Condensador. Es un enfriador cuyo uso fundamental es el de eliminar calor latente de condensación. En muchas ocasiones se utiliza aire para condensar.
• Reboiler. Es un calentador que tiene como función principal la de aportar calor latente en procesos de destilación. En ocasiones se calienta con fluidos de proceso.
• Evaporador. Se utiliza para concentrar alguna solución evaporando el agua. Si en lugar de agua se vaporiza cualquier otro fluido su nombre es el de vaporizador.
En un intercambiador de calor dos corrientes a distintas temperaturas fluyen sin mezclarse para enfriar una de ellas o calentar la otra o ambas cosas a la vez. (Figura 1.1)
Figura 1.1 Flujo en un Intercambiador de Calor
Se presentan los tipos de intercambiadores de calor en función del flujo: flujo paralelo; contraflujo; flujo cruzado.
Los intercambiadores de calor cuentan con dos entradas por donde se alimenta el fluido cálido y el fluido frío con sus dos respectivas salidas de cada fluido, al interactuar se presenta una diferencia de temperaturas t1 , t2 = temperaturas de entrada y salida del fluido frío; T1 , T2 = temperaturas de entrada y salida del fluido cálido. Este tipo de intercambiador es llamado de “contracorrientes” o “contraflujo”
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 12
Figura 1.2 Intercambiador de calor en contracorriente.
Cada uno de los fluidos entra al intercambiador por diferentes extremos ya que el fluido con menor temperatura sale en contraflujo del intercambiador de calor en el extremo donde entra el fluido con mayor temperatura, la temperatura del fluido más frío se aproximará a la temperatura del fluido de entrada (Fig. 1.3). Este tipo de intercambiador resulta ser más eficiente que los otros dos tipos mencionados. En contraste con el intercambiador de calor de flujo paralelo, el intercambiador de contraflujo puede presentar la temperatura más alta en el fluido frío y la más baja temperatura en el fluido caliente una vez realizada la transferencia de calor en el intercambiador.
Figura 1.3 Comportamiento del intercambiador de calor en contraflujo.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 13
Figura 1.4 Intercambiador de calor de flujo paralelo.
En este caso, los dos fluidos entran al intercambiador por el mismo extremo y estos presentan una diferencia de temperatura significativa. Como el calor se transfiere del fluido con mayor temperatura hacia el fluido de menor temperatura, la temperatura de los fluidos se aproxima la una a la otra, es decir que uno disminuye su temperatura y el otro la aumenta tratando de alcanzar el equilibrio térmico entre ellos (Figura 1.5). Debe quedar claro que el fluido con menor temperatura nunca alcanza la temperatura del fluido más caliente.
Figura 1.5 Comportamiento del intercambiador de calor de flujo paralelo.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 14
Figura 1.6 Corrientes cruzadas en un intercambiador de calor
En la figura 1.7 se muestra como en el intercambiador de calor de flujo cruzado uno de los fluidos fluye de manera perpendicular al otro fluido, esto es, uno de los fluidos pasa a través de tubos mientras que el otro pasa alrededor de dichos tubos formando un ángulo de 90◦.Los intercambiadores de flujo cruzado son comúnmente usado donde uno de los fluidos presenta cambio de fase y por tanto se tiene un fluido pasado por el intercambiador en dos fases bifásico. Un ejemplo típico de este tipo de intercambiador es en los sistemas de condensación de vapor, donde el vapor exhausto que sale de una turbina entra como flujo externo a la carcasa del condensador y el agua fría que fluye por los tubos absorbe el calor del vapor y éste se condensa y forma agua líquida. Se pueden condensar grandes volúmenes de vapor de agua al utiliza este tipo de intercambiador de calor.
Figura 1.7 Comportamiento de un intercambiador de flujo cruzado.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 15
real que incluye dos, o los tres tipos de intercambio descritos anteriormente, resulta muy complicado de analizar. La razón de incluir la combinación de varios tipos en uno solo, es maximizar la eficacia del intercambiador dentro de las restricciones propias del diseño, que son: tamaño, costo, peso, eficacia requerida, tipo de fluidos, temperaturas y presiones de operación, que permiten establecer la complejidad del intercambiador.
1.4 TIPOS DE INTERCAMBIADORES DE CALOR
Debido a los diferentes requerimientos dentro de la industria se han desarrollados diferentes tipos de intercambiadores de calor. Hoy en día en todos los procesos dentro de las donde se requiere enfriar o calentar dos sustancias sin entrar en contacto, es casi imposible no encontrar un intercambiador de calor debido a que la operación de enfriamiento o calentamiento es inherente a todo proceso que maneje energía en cualquiera de sus formas.
Esta gran demanda de equipos ha orillado que para ciertas aplicaciones puntuales se hayan desarrollado intercambiadores muy especializados. Tratar todos los tipos sería imposible por la cantidad y variedad en ellos que se puede encontrar.
En forma muy general, podemos clasificarlos según el tipo (Figura 1.8) de superficie en:
Figura 1.8 Clasificación de Intercambiadores de Calor
Los Intercambiadores de Serpentín Sumergido
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 16
Intercambiadores de Doble Tubo
Es el tipo más sencillo de intercambiador de calor. Está constituido por dos tubos concéntricos de diámetros diferentes. Uno de los fluidos fluye por el tubo de menor diámetro y el otro fluido fluye por el espacio anular entre los dos tubos. En este tipo de intercambiador son posibles dos configuraciones en cuanto a la dirección del flujo de los fluidos: contraflujo y flujo paralelo. En la configuración en flujo paralelo los dos fluidos entran por el mismo extremo y fluyen en el mismo sentido. En la configuración en contraflujo los fluidos entran por los extremos opuestos y fluyen en sentidos opuestos.
Intercambiadores de coraza y haz de tubos
El intercambiador coraza o también llamado de carcasa y tubo, consiste en una serie de tubos lineales colocados dentro de un tubo muy grande llamado coraza y representan la alternativa a la necesidad de una gran transferencia de calor. Se usan para servicios que requieren grandes superficies de intercambio, generalmente asociadas a caudales mayores de los que puede manejar un intercambiador de calor de doble tubo. La solución consiste en ubicar los tubos en un haz, rodeados por un tubo de gran diámetro denominado coraza. De este modo los puntos débiles donde se pueden producir fugas, en las uniones del extremo de los tubos con la placa, están contenidos en la coraza. En cambio en un conjunto de horquillas estos puntos están al aire libre.
Enfriadores de cascada
Los enfriadores en cascada consisten en una serie de tubos montados horizontalmente, uno sobre otros. Se denominan a veces enfriadores de trombón, enfriadores de goteo o de serpentín. El agua de enfriamiento de un depósito de distribución se desliza sobre cada tubo y, a continuación, va a un dren. El fluido caliente circula generalmente en flujo a contracorriente, del fondo a la parte superior del grupo de tubos. Existen enfriadores en cascada de vidrio, grafito impermeable, hierro colado y otros materiales.
Recipientes Encamisados
El encamisado o enchaquetado se utiliza con frecuencia para recipientes que necesitan limpieza frecuente o para los recubrimientos de vidrio que son difíciles de equipar con serpentines internos. La camisa elimina la necesidad de serpentín. Intercambiadores de Placa
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 17
circulan los fluidos. Entre las placas hay dos canales con un medio frío y otro caliente. Éstos fluyen por cada lado de las placas y circulan a contracorriente. Estas placas están montadas sobre un bastidor de acero y dos placas o columnas de acero sujetadas por tornillos de apriete que compactan las placas. Cada placa dispone de 4 bocas por donde circulan los fluidos en paralelo, mientras que un fluido es conducido por las placas pares y el otro por las impares consiguiendo así el necesario intercambio de calor entre ambos.
Los intercambiadores de calor de placas son ideales para aplicaciones en las que los fluidos tienen una viscosidad relativamente baja y no contienen partículas. Como bien se mencionó en el subtema 1.1.1, para poder visualizar el comportamiento de un intercambiador es necesario comenzar a realizar su balance de materia y energía, obtener su modelado matemático, para después llegar a una función de transferencia que a su vez será introducida en el software para su simulación, de manera que así podremos observar su comportamiento.
En el siguiente capítulo se describe el modelado que se va a utilizar para la simulación del intercambiador, así que esto nos permitirá después visualizar y controlar éste proceso en los programas a utilizar. Cabe recalcar que no solo se puede simular equipos de transferencia de calor como lo es el intercambiador, sino que se pueden observar cualquier tipo de procesos específico o general, se escogió un intercambiador solo para comprobar que se puede controlar y visualizar el proceso mediante un enlace entre los dos software, siendo éste enlace la parte medular del presente trabajo.
1.5 CONCEPTO DE OPC
El OPC (OLE for Process Control) es un estándar de comunicación en el campo del control y supervisión de procesos industriales, basado en una tecnología Microsoft, que ofrece una interfaz común para comunicación que permite que componentes de software individuales y de diferentes marcas interaccionen y compartan datos. La comunicación OPC se realiza a través de una arquitectura cliente-servidor. El servidor OPC es la fuente de datos (como un dispositivo hardware a nivel de planta) y cualquier aplicación basada en OPC puede acceder a dicho servidor para leer/escribir cualquier variable que ofrezca el servidor. Es una solución abierta y flexible al clásico problema de los propietarios de los drivers. Prácticamente todos los mayores fabricantes de sistemas de control, instrumentación y de procesos han incluido OPC en sus productos.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 18
especificación técnica que define un conjunto de interfaces basadas en estándares de tecnología Microsoft. La aplicación de la interfaz OPC estándar hace posible la interoperabilidad entre aplicaciones de automatización/control, sistemas/dispositivos de campo y aplicaciones de negocio/oficina. Tradicionalmente, cada desarrollador de aplicaciones o software estaba obligado a escribir una interfaz personalizada o servidor/controlador, para intercambiar datos con dispositivos de campo del hardware. OPC elimina este requisito mediante la definición de una interfaz común y de alto rendimiento que permite que este trabajo se realice una vez, y luego reutilizar fácilmente por HMI, SCADA, control y aplicaciones personalizadas.
Como se observa en la figura 1.9, anteriormente era complicado llevar a cabo una comunicación entre diferentes proveedores de equipos, la industria debía estar
“casada” con una solo marca para que no tuviera problemas entre sus propios
equipos, hoy en día esto es diferente, bajo el estándar de OPC la comunicación entre equipos de diferentes proveedores se hace realidad, siempre y cuando los equipos funcionen bajo ese estándar.
Figura 1.9 Comparación antes y después del OPC.
Existe una fundación que reúne a los miembros que operan bajo el estándar OPC, dicha fundación (OPC Foundation) se dedica a garantizar la interoperabilidad en la automatización de la creación y el mantenimiento de especificaciones abiertas que estandarizan la adquisición y control de datos de proceso, alarmas y registros de eventos, datos históricos y datos de lotes a los sistemas empresariales de múltiples proveedores y entre dispositivos de producción. Los dispositivos de producción incluyen sensores, instrumentos, PLCs, RTUs, DCS, HMI, historiadores, subsistemas de tendencias, subsistemas de alarmas y más utilizado en la industria de procesos, la fabricación y en la adquisición y el transporte de petróleo, gas y minerales.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 19
en una planta de proceso, tal como una refinería petroquímica, de una línea de montaje de automóviles, o una fábrica de papel.
Un servidor OPC se identifica mediante un ID de servidor único. El ID de servidor es único en el equipo en el que se encuentra el servidor. Una combinación del nombre de host del equipo servidor y el ID de servidor del servidor OPC, proporciona un identificador único para un servidor OPC en una red de computadoras.
En la actualidad hay cientos de servidores OPC y también de clientes entre los cuales se encuentran:
o Siemens
o Procter & Gamble o Rockwell Automation o Matlab
o Matrikon OPC o ABB Automation
o Emerson Process Management o Endress + Hauser Process Solutions o Schneider Electric
Para los usuarios, la gran ventaja es la flexibilidad de interoperabilidad entre diferentes equipos. Rápidamente se dieron cuenta de que la comunicación se podría ver beneficiada bajo su normalización y estandarización.
Las especificaciones OPC actuales y emergentes incluyen: OPC Data Access
Los originales! Se utiliza para mover datos en tiempo real de los PLC, DCS, y otros dispositivos de control a HMIs y otros clientes de visualización.
OPC Alarmas y Eventos
Proporciona notificaciones de alarmas y eventos a la carta (en contraste con el flujo continuo de acceso de datos). Estos incluyen alarmas de proceso, las acciones del operador, mensajes informativos y mensajes de seguimiento/auditoría.
OPC lotes
Esta especificación lleva la filosofía OPC a las necesidades específicas de los procesos por lotes. Proporciona interfaces para el intercambio de capacidades de los equipos y las condiciones actuales de operación.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 20
Esta especificación nos lleva de cliente/servidor a servidor/servidor con comunicación a través de redes Ethernet de bus de campo. Esto proporciona interoperabilidad de múltiples proveedores. Y añade la configuración remota, servicios de diagnóstico y vigilancia/gestión.
OPC Historical Data Access
Cuando OPC Data Access proporciona acceso en tiempo real a los datos, continuamente cambiantes, OPC Historical Data Access proporciona acceso a los datos ya almacenados. Desde un sencillo sistema de registro de datos en serie a un complejo sistema SCADA, archivos históricos se pueden recuperar de una manera uniforme.
OPC Security
Todos los servidores OPC proporcionan información que es valiosa para la empresa y si no se actualiza, podría tener consecuencias significativas en los procesos de la planta. OPC Security especifica cómo controlar el acceso de los clientes a estos servidores con el fin de proteger la información confidencial y para proteger contra la modificación no autorizada de parámetros del proceso.
OPC XML-DA
Establece reglas flexibles, coherentes y formatos para la exposición de datos de la planta utilizando XML, aprovechando el trabajo realizado por Microsoft y otros en SOAP y Servicios Web.
OPC Complex Data
Una especificación complementaria de acceso a datos y XML-DA que permite a los servidores exponer y describir los tipos de datos más complejos, como estructuras binarias y documentos XML.
Comandos de OPC
Un grupo de trabajo se ha formado para desarrollar un nuevo conjunto de interfaces que permiten a los clientes y servidores OPC para identificar, controlar y enviar comandos de control que se ejecutan en un dispositivo.
OPC Unified Architecture
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 21
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 22
CAPÍTULO 2 MODELADO Y SIMULACIÓN EN MATLAB
La creación de un modelo preciso que pueda manifestar los parámetros más relevantes del proceso real, es el primer paso en la implementación de un laboratorio virtual. Durante el transcurso del capítulo adyacente se hace mención de los conceptos fundamentales sobre el proceso de intercambio de calor culminando con la descripción detallada de la elaboración del modelo y posterior simulación dentro del entorno del programa Simulink de Matlab.
2.1 INTRODUCCIÓN AL MODELAMIENTO DEL INTERCAMBIADOR DE CALOR
Antes de comenzar a describir el modelamiento del intercambiador de calor, se debe tener un concepto acerca del control de procesos ya que el mismo intercambiador de calor funciona como un proceso en sí, debido a que se lleva a cabo dentro de él un proceso de transferencia de calor.
El Control de Procesos se conoce como el conjunto de conocimientos, métodos, herramientas, tecnologías, aparatos y experiencia que se necesitan para medir y regular automáticamente las variables que afectan a los procesos de producción, hasta lograr la optimización en cuanto a mejoras del control, productividad, calidad, seguridad, u otros criterios.
Con respecto al control podemos mencionar los siguientes objetivos que se persiguen:
- Permitir el manejo del proceso.
- Conocer las incidencias del proceso y parámetros más importantes. - Se busca optimizar los recursos disponibles.
- Mejora el rendimiento en general.
El controlar un proceso, se refiere a cómo se controlan variables inherentes al mismo para:
- Reducir la variabilidad del producto final. - Incrementar la eficiencia.
- Mantener el proceso dentro de los límites de seguridad que corresponda. - Reducción de pérdidas en el proceso.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 23
teniendo en cuenta sus condicionantes específicos como la naturaleza del producto, su estado, grado de peligrosidad, limitaciones (de espacio, distancia, accesibilidad, explosividad, radiactividad...), límites de error aceptables para medir cada variable en cada punto del proceso, visualización de la medida, precios relativos entre varias posibles soluciones, pros y contras de cada una de ellas, etc.
Gracias al sistema de control se tiene una operación del proceso más fiable y sencilla, al encargarse de obtener unas condiciones de operación estables y corregir toda desviación que se pudiera producir en ellas respecto a los valores de ajuste. La misión del sistema de control en un proceso será corregir las desviaciones surgidas en las variables de proceso respecto de los valores determinados, que se consideran óptimos para conseguir las propiedades requeridas en el producto final. La implantación de un sistema de control de proceso adecuado, que responda y se adapte a las necesidades del sistema, mejorará la operación del mismo.
Principalmente los beneficios obtenidos serán:
Incremento de la productividad
Mejora de los rendimientos
Mejora de la calidad
Ahorro energético
Control medioambiental
Seguridad operativa
Optimización de la operación del proceso/utilización del equipo
Fácil acceso a los datos del proceso
El propósito del control de procesos es mantener la variable controlada a pesar de las perturbaciones. Las razones más importantes para aplicar estrategias de control en los procesos son:
1. Evitar lesiones al personal de la planta o del equipo. La seguridad siempre debe estar en la mente de todos, ésta es la consideración más importante.
2. Mantener la calidad del producto ya sea composición, pureza, color, etc. en un nivel continuo y con un costo mínimo.
3. Mantener la tasa de producción de la planta al costo mínimo.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 24
2.1.1 Control en lazo abierto
Dentro de las estrategias de control que se pueden implementar en un proceso el control en lazo abierto es de los más básicos para el entendimiento, este tiene la característica de no recibir el valor de la señal de salida. Por tanto, si se produce una desviación entre el valor esperado y el valor real de salida, el sistema no podrá intervenir de manera autónoma en su corrección.
Son los sistemas en los cuales la salida no afecta la acción de control. En un sistema en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada, esto hace que a cada entrada de referencia le corresponde una condición operativa fija; como resultado, la precisión del sistema depende de la calibración. En la práctica, el control en lazo abierto sólo se utiliza si se conoce la relación entre la entrada y la salida y si no hay perturbaciones internas ni externas.
Desde el punto de vista de la estabilidad, en el sistema de control de lazo abierto, ésta es más fácil de lograr, ya que en él la estabilidad no constituye un problema importante. En cambio, en los sistemas de lazo cerrado, la estabilidad sí es un problema importante, por su tendencia a corregir errores que pueden producir oscilaciones de amplitud constante o variable.
Para sistemas donde las entradas son conocidas previamente y en los que no hay perturbaciones, es preferible utilizar el control de lazo abierto. Los sistemas de control de lazo cerrado presentan ventajas sólo si se presentan perturbaciones que no son predecibles.
Características de un Sistema en Lazo Abierto:
Sistemas de control extraordinariamente sencillos
Necesita una perfecta calibración de la planta
No puede compensar posibles distorsiones en el sistema
Bajo costo de instalación
Algunos ejemplos representativos donde se aplica este tipo de control son: lavadoras, tostador de pan, semáforos, dosificadores, hornos de microondas, entre otros. Analizando el control de un semáforo común se puede entender que la señal de entrada es el tiempo asignado a cada luz (rojo, amarilla y verde) de cada una de las calles. El sistema cambia las luces según el tiempo indicado, sin importar que la cantidad de tránsito varíe en las calle, al no tener en cuenta la salida, su capacidad
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 25
Figura 2.1 Sistema en Lazo Abierto
2.1.2 Control retroalimentado
El objetivo de un sistema de control es mantener un proceso en condiciones específicas de operación, estas condiciones son valores en los que deben permanecer las variables de dicho proceso.
Existen diversas formas de implementar un sistema de control en un proceso, estas formas se conocen como estrategias de control.
El control retroalimentado consiste en medir una variable de salida llamada variable controlada o variable de proceso para compararla con un punto de operación, que es el valor en el que se desea mantener la variable de proceso, de esta operación se genera una señal de error que es la desviación de la variable controlada con respecto a su punto de operación, el controlador se encarga de recibir la señal de error y enviar una acción de control a un actuador de tal forma que la señal de error sea compensada y tienda a cero, físicamente una acción de control representa abrir o cerrar un válvula, determinar el sentido de giro de un motor, aplicar una mayor o menor cantidad de calor a un sistema, etc.
Un sistema de control es el conjunto de elementos que mantienen las variables de un proceso en puntos de operación o valores deseados de funcionamiento.
Los cuatro componentes básicos de un sistema de control retroalimentado son: - Sensor, que es conocido también como elemento primario.
- Transmisor, que se conoce también como elemento secundario. - Controlador, que es el cerebro del sistema de control.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 26
La estructura general de un sistema de control se muestra en la figura 2.2 siguiente:
Figura 2.2 Control Retroalimentado
Como se mencionó anteriormente, de la comparación de la variable de proceso obtenida del sensor, con el punto de operación, se obtiene una señal de error que se transmite al controlador, éste genera una acción de control necesaria para compensar dicho error y la envía al actuador que es el elemento que está en contacto directo con la planta, un actuador puede ser una válvula, una bomba, un pistón hidráulico o neumático, un motor, etc.
Cabe mencionar que las señales empleadas en cada uno de los elementos de los sistemas de control industrial están normalizadas, los valores normalizados de las señales de control son de 4 a 20 mA para señales eléctricas y de 3 a 15 psi para señales neumáticas.
En la actualidad el controlador empleado generalmente en un sistema de control industrial es el PID (Controlador Proporcional Integral Derivativo) que es el encargado de compensar la señal de error obtenida de la comparación entre la variable controlada y el punto de control y enviar una acción de control al actuador, de tal forma que el sistema trabaje dentro de ciertas condiciones de operación. Para sintonizar un controlador PID a un sistema de control es necesario conocer el modelo matemático del proceso ya que los valores que se deben ajustar en el PID, dependen de las características del proceso y de las condiciones de operación necesarias.
La ecuación de un controlador PID está dada por la ecuación (2.1):
= +
�∫ +
(2.1)
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 27
=
+
�
+
(2.2)
2.2 CARACTERÍSTICAS Y DESCRIPCIÓN DEL INTERCAMBIADOR DE CALOR MODELADO
A continuación se ejemplifica el modelo de un proceso típico de calentamiento de un líquido que fluye a través de un intercambiador de calor, mediante un vapor que se mueve por un serpentín instalado en su interior. Se regula la temperatura del líquido en el tanque ejecutando las acciones básicas de control ante una perturbación en el valor del flujo de la corriente de entrada. La dinámica del proceso se plantea y se modela seguidamente, y se especifican las dinámicas correspondientes a la válvula de control y el sensor empleado.
2.2.1 Descripción del Proceso
El intercambiador de calor tipo serpentín que se observa en la figura 2.3 se utiliza para calentar una corriente de proceso en forma tal que sus componentes premezclados alcancen una concentración uniforme. Es importante el control de temperatura porque un aumento de ella tiende a descomponer el producto, mientras que una baja temperatura ocasiona un mezclado incompleto. El tanque se calienta mediante vapor que condensa circulando a través de un serpentín. Se controla la temperatura en el tanque mediante acciones proporcional-integral-derivativo y la manipulación de la posición de la válvula que regula el flujo de entrada de vapor.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 28
2.2.2 Consideraciones de funcionamiento y diseño del intercambiador de calor tipo serpentín.
La densidad del alimento es de 68 lb/pie y un calor específico de 0.80 BTU/lb × °F. El volumen de líquido en el reactor es de 120 pie y se mantiene constante. El serpentín es una tubería de acero catálogo 40 de 4 pulgadas de diámetro interno y 205 pies de longitud, que pesa 10.8 lb/pie , tiene un calor específico de 0.12Btu/lb × °F y su diámetro externo es de 4.5 pulgadas. El coeficiente global de transferencia de calor U se estima en 2.1 BTU/min × pie × °F en base al área externa del serpentín. Se puede asumir que su calor latente de condensación es constante con un valor de 966 BTU/lb.
También puede asumirse que la temperatura de la corriente de entrada es constante El flujo de alimento en condiciones de diseño es 15 pie / � y su temperatura es de 100°F. El contenido del tanque debe mantenerse a una temperatura de 150°F. Las perturbaciones posibles son los cambios en el flujo de alimento y la temperatura. El sensor de temperatura es calibrado para un intervalo de medición entre 100 y 200°F y su dinámica muestra un atraso de 0.75 min. La válvula de control se diseña para un 100 % de sobrecapacidad y se pueden despreciar sus caídas de presión. La válvula es de igual porcentaje con una rangeabilidad de 50. El actuador tiene una constante de tiempo de 0.20 min.
2.3 MODELO MATEMÁTICO DEL PROCESO
A través del tanque se desarrolla un fenómeno de transporte de materia y energía, de tal manera que el modelo se plantea con los balances respectivos. Se asume un mezclado perfecto, propiedades físicas del líquido y vapor constantes, el volumen de líquido residente en el tanque constante y se desprecian las pérdidas de calor a través del tanque
2.3.1 Balance de energía
El balance de líquido a través del intercambiador es descrito por la ecuación (2.3): dρ
d = f ρ − f p (2.3)
La simplificación de volumen y densidad constante, hacen que de la ecuación (2.3) se obtenga que los flujos de entrada y salida son iguales, es decir que:
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 29
2.3.2 Balance de energía en el intercambiador
Para un balance de energía del líquido que está contenido dentro en el intercambiador, se plantea la ecuación 2.5 siguiente:
VρC dT td t = f t ρCPTi+ UA [T t − T t ] − f t ρCPT t .
Siendo V el volumen del intercambiador en m3, A el área de transferencia de calor en m2 y la temperatura del líquido primario del serpentín en °F.
2.3.3 Balance de energía en el serpentín
Para el balance de energía a través del serpentín sumergido que transporta interiormente el líquido primario se propone la ecuación 2.6:
CM dT tdt = w t λ − UA [T t − T t ] .
Siendo w(t) del líquido en lb/min y �� la capacidad calórica del metal del serpentín en BTU/°F
Asumiendo que para el líquido contenido en el intercambiador el � y el �� son aproximadamente iguales y considerando constante la temperatura de la corriente de alimentación, el modelo compuesto por las ecuaciones (2.5) y (2.6) contiene cuatro incógnitas que son la temperatura del líquido en el intercambiador, T; la temperatura del líquido primario, TS; el flujo de la corriente del líquido, y el flujo de vapor, w.
2.3.4 Linealización y Transformada de Laplace
Para analizar la respuesta controlada del proceso se requiere de la linealización de las ecuaciones del modelo, en función del tiempo, que son:
El balance de energía linealizado a través del intercambiador está representado en la ecuación 2.7a:
�� � = ���( �− ) + � � − ( � + ���) � . �
ó
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 30
Siendo � = ρCP
A+fρCP .
KF =ρCP Ti− T UA + f̅ρCp
.
K = A+ f̅ρCA
p .
El balance de energía linealizado a través del serpentín:
CM dΓdt t = W t λ− UA Γ t + UA Γ t . a
ó τCdΓdS + Γ t = Γ t + K . b Siendo:
τC= CUA M .
K = UAλ .
Siendo Γ t , Γ , y las variables de desviación de , , , y � respectivamente.
Para el análisis en el dominio de Laplace, se transforman las ecuaciones (2.7b) y (2.11b) y las correspondientes funciones de transferencia son:
Para el líquido a través del intercambiador ecuación 2.14:
� =� +� +� + �� .
Para el vapor a través del serpentín ecuación 2.15:
Γ s = τ
Cs +
Γ s + K
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 31
A partir de las funciones de transferencia (2.14) y (2.15) se deduce que el sistema es interactuante con dos variables de salida y dos variables de entrada. Al eliminar la temperatura del vapor, se obtiene la función de transferencia de la temperatura en el intercambiador agitado con respecto a las variables de entrada, es decir:
Γ s = K K
τCs + τs + − K W s +
KF τCs +
τCs + τs + − K F s . Siendo:
G s = τ K K
Cs + τs + − K
.
GF s = τ KF τCs +
Cs + τs + − K
.
2.3.5 Dinámica de la válvula de control
La función de transferencia para una válvula de igual porcentaje con caída de presión constante es de la forma:
G s = W sM s =τ s +K .
Siendo M(s) la señal de salida del controlador en porcentaje (% CO) y la ganancia de la válvula es calculada con la ecuación:
K = w ln a .
2.3.6 Dinámica del sensor transmisor
El sensor transmisor puede representarse por una dinámica de atraso de primer orden de la forma:
H s = C sT s =τ s +K .
Siendo:
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 32
2.4 PARÁMETROS DEL MODELO
Para la simulación de la respuesta dinámica del proceso se toman los valores del sistema tomando como referencia los patrones de mediciones más usuales en la industria, ya que se pueden emplear diferentes tipos de aceite y líquidos, en este caso en particular se plantean los siguientes valores (véase Anexo A).
Variables a emplear durante la simulación:
A=241.5 pie2 V= 120 pie3
�� =265.7 BTU/°F � =0.20 min
� =075 min � = 4.93 min
�� =0.524 min � = − . ° /(pie3/min)
� = . ° /(lb/min) � = . ° /°
�� = � = . % �/° � = . (lb/min)/%CO 2.5 CONSTRUCCIÓN DE LA SIMULACIÓN DINÁMICA EN SIMULINK
Para llevar a cabo la simulación del modelo matemático que describe el comportamiento de la temperatura de salida en el intercambiador de calor, es necesario realizar un diagrama de bloques en la herramienta “Simulink” incluida en el programa Matlab.
Para iniciar a construir el diagrama de bloques se incluyó el bloque “flujo entrada 1”
que representaría el flujo de la mezcla que entra al intercambiador para ser calentado, para está simulación se le otorgo un valor de flujo de 15 pie3/min, la temperatura a la que se debe llevar el sistema es de 150°F y está representada por
el bloque con la etiqueta “Set Point De La Temperatura”, enseguida de este bloque
se colocó un punto suma para calcular la diferencia que hay entre el valor deseado y el valor de salida.
La válvula de control es representada usando un bloque “Tranfer Fcn” y un bloque
“Gain”, donde se agregan los valores de su función de transferencia previamente calculados así como el valor de la ganancia Kv.
Para representar el proceso de intercambio de calor se utilizan las funciones de transferencia que corresponden al flujo de vapor en el serpentín (ec. 2.17):
=
����INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 33
Y al flujo del líquido dentro del tanque con la ecuación 2.18:
=
�� �� +�� + � + − ��
(2.18) Estas ecuaciones son evaluadas en los parámetros propuestos en el subtema 2.4, para esto se hizo uso de 2 bloques “Tranfer Fcn” de la librería de Simulink.
Finalmente se agregó un lazo de retroalimentación conformado por un sensor que se representó en un bloque de función de transferencia y se conectó al punto suma que lleva consigo el “set point” deseado. (Figura 2.4)
Figura 2.4 Diagrama en Simulink representativo del intercambiador de calor.
Una vez terminado el ensamble de los bloques representativos del sistema se
agregaron 2 bloques “Scope” para poder observar las gráficas de simulación arrojadas por nuestro proceso. Estos bloques monitorean la temperatura de salida de la mezcla o fluido de trabajo, y la temperatura del vapor o fluido de servicio durante el proceso de simulación de intercambio de calor. (Figura 2.5)
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 34
Al realizar la simulación del intercambiador se introduce un cambio en el valor del flujo de alimentación de la mezcla de 15 a 20 pie3/min con un cronometro 30 minutos (Figura 2.6) de tiempo para entrar en acción.
Figura 2.6 Implementación del cambio de flujo programado en Simulink
También se agregó un controlador PID, los parámetros del controlador (ganancia, tiempo integral y tiempo derivativo) se obtienen ocupando la herramienta llamada tune (Figura 2.7). Que se encuentra dentro de las opciones del bloque PID de Simulink.
Figura 2.7 Bloque PID en Simulink.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 35
proceso simulado y así comprobar un sistema de control con todos los elementos que lo conforman.
Figura 2.8 Sintonización del PID usando auto-tune.
Quedando finalmente el diagrama de bloques del proceso de intercambio de calor con controlador PID y cambio de flujo programado, como lo muestra la figura 2.9 siguiente.
Figura 2.9 Diagrama de bloques representativo del Intercambiador de Calor.
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN 36
corriendo la simulación y abriendo la ventana con la gráfica generada por el bloque scope, como se puede observar en la figura 2.10.
Figura 2.10 Gráfica de la respuesta del sistema al correr la simulación