INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICASECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
PRESENTA:
M. en C. LEONEL GERMÁN CORONA RAMÍREZ
DIRECTOR:
DR. GUILLERMO URRIOLAGOITIA CALDERÓN
MÉXICO, D.F; noviembre 2006
CONTROL BASADO EN LA EQUIVALENCIA
POR RETROALIMENTACIÓN DEL
ESTADO DE UN SISTEMA PASIVO DE
UN ROBOT MÓVIL
TESIS
QUE PARA OBTENER EL GRADO DE
DOCTOR EN CIENCIAS
CON ESPECIALIDAD EN
Índice
Objetivo i
Justificación i
Resumen iv
Introducción v
Capítulo I Estado de arte 1
1.1 Recientes avances en el control de robots móviles 1
1.2 Planteamiento del problema 4
1.2.1 Dificultad de solución 4
1.2.2 Como mejora la propuesta a lo existente 6 1.3 Morfología y caracterización de las propiedades funcionales 7
1.4 Robótica y mecatrónica 9
1.5 Referencias 11
Capítulo II Fundamentación Teórica 13
2.1 Pasividad y equivalencia a sistemas pasivos 13
2.2 Sistemas pasivos 14
2.3 Equivalencia por retroalimentación de estado a sistema pasivo 22
2.3 Estabilidad de sistemas pasivos 29
2.4 Sumario 32
2.5 Referencias 33
Capítulo III Modelo Matemático 34
3.1 Generalidades 34
3.2 Modelado cinemático 35
3.2.1 Modelo cinemático del robot omnidireccional. 41 3.2.2 Modelo cinemático del robot diferencial 45
3.3 Simulación del modelo cinemático 48
3.4 Modelado dinámico 53
3.4.1 Modelo dinámico del robot omnidireccional. 56 3.4.2 Simulación del movimiento para el robot omnidireccional 62
3.4.3 Modelo dinámico de los motores 65
3.5 Sumario 70
Capítulo IV Control 72
4.1 Control de un motor de corriente directa conectado en serie 72 4.2 Equivalencia del modelo del motor a un sistema pasivo 78
4.3 Control de la velocidad del motor 81
4.4 Estabilidad del sistema en lazo cerrado 83 4.5 Diseño de un estimador de la velocidad y el torque de carga 83
4.6 Función de transferencia 87
4.7 Control de los motores de C.D. 91
4.7.1 Planeación de la trayectoria 92
4.7.2 Implementación de la trayectoria 95
4.8 Escalamiento de los perfiles de velocidad 99
4.9 Sumario 104
4.10 Referencias 106
Capitulo V Planeación Mecatrónica 107
5.1 Generalidades 107
5.2 Elementos que constituyen a un Robot 108
5.3 Planteamiento de los objetivos particulares y metas concretas 111 5.4 Planteamiento de la problemática a resolver 111 5.5 Parámetros generales requeridos por el Robot móvil 112
5.6 Sumario 115
5.7 Referencias 116
Conclusiones 117
Recomendaciones para trabajos futuros 119
Anexo A Sistema mecánico 120
Índice de Figuras
Figura 1 Robot Spirit ii
Figura 1.1 Sistema de referencia móvil asociado al robot 5
Figura 1.2 Robot autónomo , Robot demining 8
Figura 1.3 Robot CyberRave 9
Figura 2.1 Sistema pasivo no lineal con una entrada y una salida 19
Figura 2.2 Circuito RLC 20
Figura 2.3 Circuito LC 21
Figura 3.1 Articulación con tres grados de libertad 35
Figura 3.2 Rueda omnidireccional 36
Figura 3.3 Estructura cinemática genérica 37
Figura 3.4 Esquema cinemático del robot. Localización del robot en el plano 41-46
Figura 3.5 Diagrama de las ruedas del robot 46
Figura 3.6 Modelo del robot 48
Figura 3.7 Orientación del robot para wi=90 rad/s, wd=90 rad/s con visualNastran 49 Figura 3.8 Orientación del robot para wi=90 rad/s, wd=90 rad/s con Matlab 49 Figura 3.9 Diagrama de bloques de matlab-simulink cinemática 50 Figura 3.10 Posición del robot para wi=-90 rad/s, wd=90 rad/s con visualNastran 51 Figura 3.11 Posición del robot para wi=-90 rad/s, wd=90 rad/s con Matlab 51 Figura 3.12 Velocidad del robot para wi=90 rad/s, wd=90 rad/s 52 Figura 3.13 Velocidad del robot para wi=-90 rad/s, wd=90 rad/s 52 Figura 3.14 Posición del del robot para wi=0 rad/s, wd=90 rad/s 52 Figura 3.15 Velocidad del robot para wi=0 rad/s, wd=90 rad/s 53
Figura 3.16 Ejemplo de movimiento lineal 63
Figura 3.17 Giro con un punto central cualquiera 63
Figura 3.18 Desplazamiento lineal con variación de la orientación 64 Figura 3.19 Rotación del robot alrededor de un punto sin cambio de orientación 65
Figura 3.20 Diagrama eléctrico motor de cd. 66
Figura 3.21 Respuesta del motor en velocidad angular 68 Figura 3.22 Diagrama a bloques en simulink para simulación del motor de cd 68 Figura 3.23 Respuesta del motor en posición del eje 69
Figura 4.1 Motor de C.D. conectado en serie 72
Figura 4.2 Circuito de conexiones para un motor de C.D. conectado 73 Figura 4.3 Controlador del motor de C.D. conectado en serie 82 Figura 4.4 Estructura control-observador para el motor de C.D. conectado en serie 85 Figura 4.5 Respuesta del motor de C.D. a una entrada escalón 89 Figura 4.6 Respuesta del motor de C.D. a una entrada de pulsos 90 Figura 4.7 Respuesta del motor de C.D. a una entrada rampa 90 Figura 4.8 Diagrama de bloques de la etapa de control 91 Figura 4.9 Trayectoria propuesta que va del punto a al punto b 92
Figura 4.10 Recorrido del punto a al b 93
Figura 4.27 Gráficas en Matlab, para encontrar los valores de wd y wi. 96 Figura 4.28 Gráficas en Matlab para encontrar los ángulos de recorrido. 97 Figura 4.29 Aceleraciones de las ruedas derecha e izquierda. 98
Figura 4.30 Señales de cuadratura del encoder 99
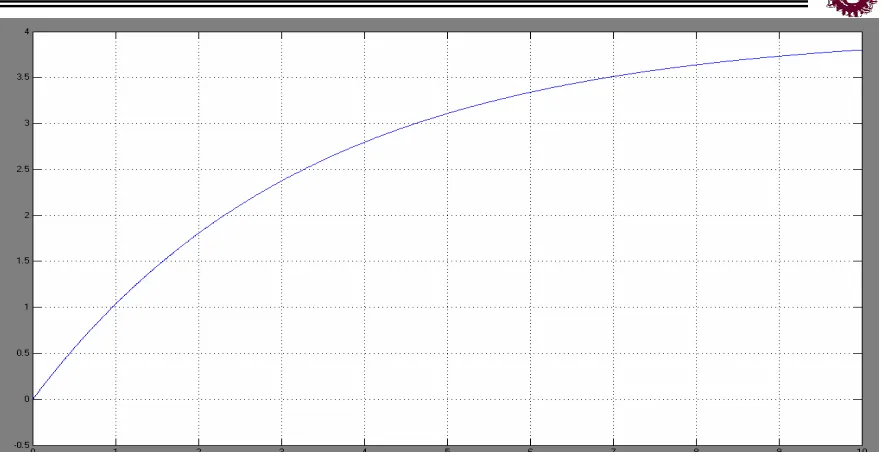
Figura 4.31 Diagrama a bloques simplificado del LM629 102 Figura 4.32 Respuesta al escalón unitario de un sistema críticamente amortiguado 103 Figura 4.33 Respuesta al escalón unitario de un sistema críticamente amortiguado 103 Figura 5.1 Esquema representativo de las disciplinas que comprenden el robot
móvil
109
Figura 5.2 Esquema general del sistema 111
Índice de Tablas
Tabla 3.1 Parámetros configuración cinemática 41
Tabla 4.1a Valores nominales de las variables y parámetros del motor de C.D.
77 Tabla 4.1b Valore de las constantes del motor
88 Tabla 4.22 Características del circuito integrado LM629
91 Tabla 5.1 Velocidades del motor de C.D.
OBJETIVO
Objetivo General: Diseñar un algoritmo de control con base en la equivalencia de los sistemas no lineales por retroalimentación del estado a sistemas que disipan energía o sistemas pasivos para un robot móvil con configuración del sistema de locomoción “two driving wheels plus roller-ball for balance”
Objetivo Particular 1: Diseñar un algoritmo que “pasivise” el sistema no lineal por medio de la retroalimentación del estado.
Objetivo Particular 2: Obtener una estrategia de control con base a la propiedad de pasividad del sistema no lineal, para el seguimiento de trayectorias.
Objetivo Particular 3: Construir un prototipo de robot-móvil con configuración del sistema de locomoción “two driving wheels plus roller-ball for balance”, e implementar el esquema de control para validar resultados teóricos.
JUSTIFICACIÓN
Cuando una tarea debe ser ejecutada dentro de un ambiente peligroso, hostil o inaccesible; una posible alternativa para realizarla y minimizar el riesgo al personal es mediante el uso de robots. Por lo tanto si se requiere que un robot móvil realice este trabajo.
Figura 1 Robot Spirit.
Por otra parte, el problema del seguimiento de trayectorias para un vehículo ha recibido una considerable atención por parte de numerosos investigadores, proponiéndose una gran variedad de técnicas para ello. Estas técnicas varían significativamente en función del tipo de entorno en el cual el robot móvil se desplaza, de la tarea a realizar, y del tipo de sensores con el que el robot esta equipado.
Es de gran ayuda poder establecer una ruta o trayectoria previamente definida al robot, y que éste pueda seguirla de manera autónoma, reduciendo así errores de seguimiento debidos al retardo de tiempo, posibles inexactitudes del operador o teleoperador. Esta característica de los robots es apreciable, inclusive en aplicaciones de CAD-CAM-CAE, manufactura flexible, militares y medicina.
Actualmente, se están estudiando cierta clase de sistemas no lineales que pueden hacerse equivalente, mediante una retroalimentación estática de los estados, a un sistema pasivo, utilizando conceptos de la teoría geométrica para sistemas no lineales. En particular, la caracterización que se obtiene de los sistemas que pueden hacerse equivalentes a un sistema pasivo es una “mejora” no lineal de algunos resultados clásicos con relación a la pasividad de un sistema lineal. Por ejemplo, los sistemas no lineales pasivos comparten la analogía no lineal de la propiedad de fase mínima expresada en términos de la dinámica cero del sistema, y en términos de este invariante, se puede resolver, bajo ciertas suposiciones de regularidad adecuadas, el problema de identificar aquellos sistemas no lineales que son equivalentes por retroalimentación a sistemas pasivos.
menos restrictiva y más interesante del problema de equivalencia por retroalimentación a un sistema lineal.
En la actualidad, las técnicas comúnmente empleadas para el control de robots móviles utilizan esquemas de control clásicas, control PID, PD, control adaptable. En este trabajo se propone una estrategia de control para el problema de seguimiento de trayectorias de un robot móvil con sistema de locomoción “two driving wheels plus roller-ball for balance” y está fundamentada en la pasividad inducida por retroalimentación estática de los estados.
Lo que se busca con el desarrollo de este trabajo doctoral, es demostrar que el seguimiento de trayectorias por medio del control pasivo es una opción factible en el control de robots móviles, la autonomía y el desempeño del robot puede incrementarse si el sistema no lineal se reduce a un sistema pasivo que puede ser inclusive controlado por medio de esquemas de control lineal clásico. Si en una sola secuencia de datos se introduce la función de movimiento, se puede reducir el tiempo de procesamiento que implica el tratamiento de las señales generadas por los sensores, que determinan el perfil de movimiento.
La contribución de este trabajo consiste en la obtención del esquema de control pasivo que permita su implantación sobre el robot y mostrar la viabilidad del procedimiento propuesto a través del análisis de los resultados teórico y experimental.
RESUMEN
En el presente trabajo, se describe el diseño de un esquema de control con base en la equivalencia de los sistemas no lineales, a sistemas que disipan energía o sistemas pasivos. Esta estrategia de diseño se propone para el problema de seguimiento de trayectorias de un robot móvil con sistema de locomoción “two driving wheels plus roller-ball for balance” y está apoyada en la pasividad inducida por retroalimentación estática de los estados. Se describen también los resultados teóricos y experimentales del algoritmo de control.
Para la parte teórica se analiza las propiedades de los modelos matemáticos cinemático-dinámico del robot. Algunos de los problemas que se tienen que resolver para desarrollar e implementar este tipo de control, son demostrar si el sistema no lineal cumple con las condiciones necesarias para que pueda hacerse equivalente por retroalimentación del estado a un sistema pasivo, diseñar un algoritmo que “pasivise” el sistema y desarrollar una ley de control para seguimiento de trayectorias. Para esto, es necesario tener un modelo lo más aproximado posible a la realidad del robot, ya que este tipo de esquema de control se basa en la cancelación de las no linealidades que existen en el sistema. Para verificar el desempeño del algoritmo de control, así como el desempeño del robot en diferentes condiciones de operación, se realizan simulaciones.
Para la parte experimental, se presenta un procedimiento sistemático en el análisis y la integración de los elementos físicos (mecánicos, electrónicos y de computación) que permitió la implantación del algoritmo de control desarrollado, validando así los resultados teóricos obtenidos en simulación a través de los resultados experimentales reales.
ABSTRACT
Presently work, the design of a control with base in the equivalence of the non lineal systems to systems that dissipate energy or passive systems is described,. This design strategy intends for the problem of tracking of a mobile robot's trajectories with system of locomotion "two driving wheels plus roller-ball for balance" and it is supported in the passivity induced by static feedback of the states. The theoretical and experimental results of the control algorithm are also described.
For the theoretical part it is analyzed the properties of the robot's cinematic-dynamic mathematical models. Some of the problems that have to be solved to develop and to implement this control type are: to demonstrate if the non lineal system fulfill the necessary conditions so that it can become equivalent for feedback of the state to a passive system, to design an algorithm that "becomes passive" to the system and to develop a control law for tracking of trajectories. For this, it is necessary to have a model the most approximately possible to the robot's reality, due to this type of control scheme is based on the cancellation of the non lineal ways that exist in the system. To verify the acting of the control algorithm, as well as the robot's acting under different operation conditions, simulations are carried out.
INTRODUCCIÓN
A través de la historia, se ha podido constatar que el avance de la ciencia y tecnología ha jugado un papel primordial en el desarrollo de los pueblos. La continua búsqueda de nuevas alternativas tecnológicas que mejoren el desempeño funcional de los sistemas tradicionales de ingeniería, tanto en el proceso, así como en el diseño, ha propiciado el surgimiento reciente de una nueva concepción en ingeniería llamada Mecatrónica, La palabra Mecatrónica fue inventada en Japón a finales de los años 60's, por la compañía Yaskawa Electric Company [I.1]. La combinación sinérgica de las Ingenierías Mecánica, Electrónica, Control y Computación es en la actualidad el concepto más extendido y aceptado en el mundo que define a la Mecatrónica" [I.2]. Es importante mencionar que en un sistema mecatrónico, la toma de decisiones es con base en el programa desarrollado para operarlo, pudiendo éste programarse en computadoras o microcontroladores [I.3]. Este se fundamenta en la interacción cooperativa entre los agentes mecánicos y electrónicos para crear un efecto combinado reforzado mayor que la suma de los efectos individuales" [I.4].
De acuerdo a la anterior definición la robótica es considerada como uno de los sistemas mecatrónicos más notables por su avanzado desarrollo tecnológico. El programa en tiempo real implementado en todos los sistemas de este tipo es de seguridad crítica, un mal funcionamiento puede ocasionar serios daños sobre la tarea a realizar y sobre el propio sistema. La palabra clave es sincronía, se vuelve el corazón y el alma del programa en tiempo real [I.5]. Los sistemas mecatrónicos controlados por redes de computadoras a menudo se relacionaban estrechamente con la realidad virtual y el multimedia [I.6].
Existen varias definiciones de robot móvil, una de las mas conocidas menciona que, “un robot móvil es un vehículo autónomo con cierto grado de inteligencia, que es capaz de realizar algunas tareas útiles”. [I.6a] Una de las clasificaciones mas aceptada de las máquinas móviles depende del tipo de control que se quiera utilizar en la máquina, existen tres fundamentales: Teleoperación, Telerobot y Autónomo.
Sin embargo, el avance tecnológico también ha propiciado muchas veces situaciones desfavorables que influyen negativamente a la sociedad, como lo es el caso del desarrollo de armas inteligentes (robots) de exterminio masivo, con las cuales es posible destruir ciudades enteras, accidentes nucleares, contaminación del entorno natural etc. Un ejemplo de esto es la catástrofe ocurrida en 1986, donde una explosión de vapor reventó la tapa de un reactor de la unidad 4 en Chernobyl, causada irónicamente por la realización de un experimento relacionado con la seguridad, en el que se pretendía demostrar que la electricidad producida por el alternador, a partir de la inercia de la turbina sin vapor, podría usarse para alimentar ciertos componentes del sistema de refrigeración de emergencia, durante periodos cortos, hasta que pudiera disponerse de los generadores de emergencia. Sobre de las ruinas del reactor se construyó un sarcófago de concreto con acero, en donde todos los héroes que participaron en la construcción murieron a causa de la exposición a la radiación, y mantuvieron escondido del mundo toneladas de escombros y polvo, piscinas de radiación, así como la verdadera extensión del daño hecho en la madrugada del 26 de abril de 1986. El robot móvil Pioneer, uno de los más avanzados que existen en la actualidad, está dotado de sensores y cámaras estéreo para tomar muestras, mediciones de las condiciones del entorno y crear un modelo de computadora tridimensional, ayudó a los ucranianos a un plan de limpieza. La meta fue tener la zona lo suficientemente limpia para que de esta manera otros robots móviles pudieran entrar y reforzar el tan deteriorado sarcófago.
ORGANIZACIÓN DE LA TESIS
Esta tesis está estructurada de la siguiente manera:
En el capítulo I se exponen los recientes avances en el control de robots móviles se hace una breve descripción del desarrollo de esta importante área tecnológica. Se analiza el avance de las técnicas de control implantadas.
En el capítulo II se exponen los fundamentos teóricos, se analiza la propiedad de pasividad en los sistemas físicos. Se describe el marco teórico que fundamenta al control con base en pasividad.
En el capítulo III se obtienen los modelos matemáticos cinemático y dinámico del robot, se simulan y validan, además se muestran resultados
En el capitulo IV se describe el algoritmo de control implementado, sustentado en un esquema con base, en la pasividad inducida por la retroalimentación estática de los estados.
En el Apéndice A se muestra el desarrollo del sistema mecánico, Se partió primeramente del estudio sobre las distintas configuraciones de desplazamiento o sistemas de locomoción de robots móviles, posteriormente se analiza los parámetros requeridos en la funcionalidad del robot, finalmente se proponen las características finales requeridas para que posteriormente se integren estos subsistemas y se obtenga el sistema completo.
En el capítulo B se muestra el desarrollo del sistema electrónico, se analiza los parámetros requeridos en la funcionalidad del robot, finalmente se proponen las características finales requeridas.
TRABAJOS RELACIONADOS
Desde el punto de vista de la teoría de control, recientemente se ha mostrado que el uso de conceptos y técnicas de la teoría de sistemas pasivos y de la teoría de control geométrica no lineal permiten tener una metodología mas completa para el diseño de estructuras de control en sistemas no lineales [I.19].
Los actuadores de los robots, son sistemas cuyos modelos son no lineales, se han reportado varias aplicaciones de la teoría de control no lineal a este tipo de sistemas (véase, por ejemplo, [I.20, I.21, I.22, I.23, I.24]. En particular, en [I.20] se presenta un control con base en técnicas de geometría diferencial junto con un observador no lineal que permite estimar la velocidad y torque de carga usando solo las mediciones de las corrientes. En la aplicación que se presenta en esta sección, se utiliza el modelo del motor de CD dado en [I.20] para hacerlo pasivo por medio de la retroalimentación estática de los estados y así poder diseñar un controlador simple para regular su velocidad. Se utiliza, además, el mismo observador no lineal propuesto en [I.20] para estimar esta velocidad y el torque de carga.
En México existe un gran número de trabajos de investigación que están relacionados con el control de robots móviles, se pueden citar como ejemplo los siguientes: En el laboratorio de control de la DEPFI, UNAM se desarrolló un robot móvil de ruedas, el cual tiene como objetivo la realización de una trayectoria compuesta de líneas rectas y arcos de circunferencia. Dicha trayectoria es dada por medio de una PC. La comunicación de la PC al Robot Móvil es por medio de comunicación serial.
tarjeta denominada de periféricos. El microcontrolador utilizado es el HC11F1 de Motorola, en modo expandido. En él se realiza la etapa de control para la velocidad y dirección de las llantas delanteras del mismo.
A partir de 1998 en el Departamento de Mecatrónica del Centro de Estudios Avanzados del Instituto Politécnico Nacional se ha trabajado también esta línea de investigación, específicamente en robots móviles con configuración diferencial y robots con remolque que siguen trayectorias preestablecidas. Se han desarrollado trabajos donde desarrollan esquemas de control conmutado, con base en leyes de control linealizantes. La estrategia de control consiste en lograr que las señales de control siempre estén bien definidas. Para ello, cuando la trayectoria se acerca a la sub-variedad singular de la ley de control esta se desactiva y se activa una ley de control linealizante con una subvariedad singular diferente [1.25].
REFERENCIAS
[I.1] Japan Trademark Registration, no. 946594, Jn. 1972.
[I.2] Mechatronics - "What Is It, Why, and How", An Editorial, IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, pags: 1-4, March 1996.
[I.3] David M. Auslander, "What is Mechatronics?", IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, pags: 5-9, March 1996.
[I.4] Nobuhiro Kyura y Hirosuke Oho, Mechatronic “-An Industrial Perspective", IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, pags:10-15, March 1996.
[I.5] Rolf Isermann, IEEE, "Modeling and Desing Methodology for Mechatronic Systems", IEEE/ASME Transactions on Mechatronics, Vol. 1, No. 1, pags: 16-28, Mareh 1996.
[I.6] Robin R. Murphy, "Introduction to Al Robotics", Massachusetts of Technology, The MIT Press, 2000, ISBN 262-1338.
[1.6a] http: //pitts.rhon.itam.mx/Espaniol/Simuladores/MissionLab.htm
[I.7] Díaz de León, V. M. "Metodología para el Diseño de un Robot Manipulador Industrial", Tesis de Maestría. SEPI-ESIME-IPN, 1993.
[I.8] Ramiro López A, "Análisis Cinemático y Dinámico de un Manipulador Robótico con tres Gados de Libertad", Tesis de Maestría, SEPI-ESIME-IPN, 1993.
[I.9] Rojas Garnica, J.C., "Diseño de un Mecanismo Atornillador para un Brazo Manipulador Robótico", Tesis de Maestría. SEPI-ESIME-IPN, 1997.
[I.10] Gonzáles Sánchez, A., "Desarrollo de un Simulador para el Control de un Brazo Robótica", Tesis de Maestría, SEPI-ESIME-IPN, 1993.
[I.11] Merchán Cruz, E. A. "Metodología para la Generación de Trayectorias de Manipuladores Robóticos, su Cinemática y Dinámica" , Tesis de Maestría, SEPI-ESIME-IPN, 2000.
[I.12] B. Solano, T. P. "Diseño de un Manipulador Robótico de Cinco Grados”,Tesis de Maestría. SEPI--ESIME-IPN. 2003.
[I.13] V. Sánchez A. T. "Implementación del Control PID a un Grado de Libertad", Tesis de Maestría, SEPI-ESIME-IPN, 2003.
[I.14] U. Guerrero H. M. "Diseño de un Efector Final para Pintura", Tesis de Maestría. SEPI-ESIME-IPN,-2003.
[I.15] Ramírez G. J. "Diseño de un Efector Final de Ventosa por Vacío", Tesis de Maestría. SEPI-ESIME-IPN, 2003.
[I.16] Aguirre, H. "Modelación y Simulación de Sistemas Electromecánicos Bajo Control",Tesis de Maestría, SEPI-ESIME-IPN,1998.
[I.17] Russell L. Anderson, A Robot Ping Pong Player: Experiments in Real- time Intelligent Control. Cambridge, MA: The MIT Press, 1988.
[I.18] Tien-Chien Chang, Richard A. Wysk, "Computer-Aided Manufacturing", Segunda edición, Prentice Hall lnternationaI.1998.
[I.19] Byrnes C.I., A. Isidori y J.C. Willems, “Passivity, Feedback Equivalence, and the Global Stabilization of Minimum Phase Nonlinear System”, IEEE Trans. on Contr. vol. 36, pp. 1228-1240, 1991.
[I.21] Chiason J., “Nonlinear Differential-Geometric Tecniques for Control of a Series DC Motor” , IEEE Trans. On Contr. Syst. Tech., vol 2, no.1, pp. 35-42, 1994. [I.22] Chiason J., y M. Bodson , “Nonlinear and Adaptive Control of a Shunt dc Motor”,
IEEE Trans. On Contr. vol 38, no.11, pp. 1662-1666, 1993.
[I.23] Isidori A., Nonlinear Control Systems, 3rd Ed. Spriger Verlag, New York, 1995.
[I.24] Marino R., “An Example of a Linear Regulator”, IEEE Trans. on Aut Contr., vol AC-29, no. 3 pp. 276-279, 1984.
CAPÍTULO I
ESTADO DEL ARTE
1.1 Recientes Avances en el Control de Robots móviles
En la actualidad el desarrollo de la robótica ha tenido notables avances, particularmente la teoría del control no lineal ha reportado una prosperidad considerable. Principalmente las técnicas de linealización, el control por modos deslizantes y las técnicas adaptables no lineales [1.1 y 1.2]. En la conducción de robots móviles y automóviles así como en sistemas de control de vuelo en sistemas espaciales es donde principalmente se han reportado las aplicaciones de estas técnicas de control.
En el estudio de la robótica se ha utilizado el concepto de almacenamiento de energía para deducir el comportamiento del sistema, sin embargo en la actualidad no se ha reportado ningún trabajo relacionado con este enfoque y aplicado al control dinámico de un robot móvil.
Un sistema pasivo puede ser definido como un sistema que siempre disipa energía; la energía almacenada en el sistema es inferior a la energía externa suministrada al mismo. Esto tiene un sentido físico si el sistema es por ejemplo una red eléctrica En el estudio de los sistemas físicos, tales como un sistema mecánico o una red eléctrica, se utiliza frecuentemente el concepto de almacenamiento de energía para poder comprender el comportamiento de los mismos. Se puede decir, en general, que la dinámica de un sistema físico satisface el principio de la conservación de la energía representando por medio de la ecuación (1.1) en otros casos puede no existir una interpretación física simple.
presentaron resultados importantes sobre la estabilidad de sistemas disipativos no lineales fundamentados en la generación de funciones de Lyapunov y en [1.6], se publicaron los primeros resultados sobre estabilidad de sistemas no lineales disipativos retroalimentados. En [1.7] se aplicaron los resultados obtenidos con la geometría diferencial a los sistemas no lineales disipativos, y se presentaron algunas herramientas para el estudio cualitativo del comportamiento de los sistemas no lineales con múltiples puntos de equilibrio. Se han reportado también los resultados que permiten saber bajo que condiciones una cierta clase de sistemas no lineales pueden ser equivalentes a sistemas pasivos [1.10], Cuando un sistema no lineal es equivalente a un sistema pasivo por retroalimentación del estado, este puede ser asintóticamente estabilizado, bajo ciertas suposiciones adicionales, por medio de una simple retroalimentación de la salida [1.10,1.8]. La estabilización de un sistema es importante para la regulación y el seguimiento asintótico de trayectorias. En [1.11] se presentaron algunos resultados sobre el problema de hacer pasivo a un sistema no lineal que tiene incertidumbres paramétricas por medio de un controlador adaptable.
Actualmente, se tienen reportados varias aplicaciones con base en el diseño de reguladores por retroalimentación para sistemas pasivos. Estas aplicaciones están fundamentadas en la modificación de la función de almacenamiento de energía asociada al sistema y en la posibilidad de agregar al mismo un amortiguamiento por retroalimentación. Este enfoque ha sido aplicado, principalmente, a robots manipuladores y motores síncronos.[1.12, 1.13, 1.14]. Sin embargo, a la fecha de realización de esta memoria no ha sido reportado algún procedimiento sistemático fundamentado en la equivalencia de un sistema robot móvil a un sistema pasivo.
Los últimos avances en el estudio de metodologías para resolver el problema de seguimiento de trayectorias de un robot móvil, están enfocados al control de movimiento en un robot móvil, consecuentemente se ha extendido considerablemente. Varias contribuciones teóricas y prácticas han sido realizadas, particularmente la linealización por retroalimentación ha sido objeto del interés de un gran número de investigadores y algunas de estas técnicas han sido empleadas en el control de robots móviles. En [1.28] problemas de seguimiento de trayectorias de algunos tipos de robots móviles han sido investigados mediante la linealización por retroalimentación estática y dinámica. En [1.29] se estudian los problemas de seguimiento local y global por variación del tiempo, con base en la técnica de retroceso (backstepping). En un sistema de locomoción donde se tienen restricciones no holónomas debidas a la configuración del sistema de ruedas del robot móvil, se tiene una controlabilidad deficiente, por lo tanto es difícil controlarlas. El problema de estabilización puede ser atacado a partir de la generación de entradas de control para llevar el robot desde un punto inicial a un punto final. El problema crucial en el escenario de la estabilización se centra en el hecho de que el modelo robot móvil no puede ser conocido completamente, y necesariamente una condición de estabilización por retroalimentación, así el robot móvil no puede ser estabilizado con retroalimentación del estado, lo cual conlleva a una limitación de aplicación. Algunos controladores discretos, controladores con variación de tiempo y controladores híbridos con base en la teoría de Lyapunov han sido propuestos en [1.30]. El problema de seguimiento global para referenciar un robot móvil con base en la técnica de retroceso es discutido [1.31]. El problema de seguimiento de trayectorias para referenciar un robot móvil con base en la técnica de modos deslizantes es mostrado en [1.32], para esto se requiere una velocidad de rotación diferente de cero. La estabilización de un robot móvil mediante la retroalimentación exacta del espacio de estado con base en la aproximación dinámica es dada en [1.33]. El problema de estabilización en un marco polar, puede ser transformado al problema de controlar un sistema lineal invariante. Pero esto tiene la desventaja que se requiere la verificación de una compleja involución. Y solo es analizado el problema de estabilización pero el problema de seguimiento no es resuelto.
1.2 Planteamiento del problema
En este trabajo describe el diseño de un esquema de control implementado a un robot móvil. El algoritmo de control está constituido por dos niveles jerarquizados. Primeramente, un lazo externo de control que se aplica al modelo cinemático y que consiste de un esquema de linealización entrada-salida por retroalimentación de los estados, también se tiene un esquema para el control de los motores sustentado en un control con enfoque pasivo. Se revisan los conceptos de disipatividad y pasividad para una clase de sistemas no lineales, se dan las condiciones para que un sistema no lineal de una clase considerada pueda ser equivalente aun sistema pasivo mediante retroalimentación estática de los estados. Finalmente, se describen algunos resultados sobre la estabilización de sistemas pasivos.
1.2.1 Dificultad de solución
Desde el punto de vista de la cinemática, la estructura de un robot móvil, se puede considerar como un conjunto de cadenas cinemáticas cerradas, tantas como ruedas en contacto con el suelo. Asimismo, la interacción rueda-suelo se define, desde el punto de vista cinemático, como una articulación planar con tres grados de libertad, donde uno de ellos, generalmente sin controlar, representa los deslizamientos laterales. Estos dos hechos dificultan la construcción del modelo, ya que se dan efectos no presentes en los manipuladores. En concreto, cobra gran importancia la perfecta sincronización de la velocidad de las ruedas para alcanzar una localización determinada, factor que no resulta determinante en el ámbito de los manipuladores. Esto se debe a que el avance a lo largo de un grado de libertad cartesiano, se consigue gracias a la combinación de las aportaciones de las velocidades lineales de las ruedas al punto de guía del vehículo. Por esta razón de complejidad, muchos autores emplean soluciones cinemáticas particularizadas para cada configuración específica de vehículos. Entre estas, se destacan los modelos síncronos [1.15], la disposición de Ackerman [1.16], o el modelo de la bicicleta [1.17].
En cuanto a la dinámica, resulta muy complicado tener en cuenta todos los efectos que se producen en el vehículo, y en particular la interacción con el terreno. Asimismo, suponiendo que sea posible un modelo preciso, la cantidad de parámetros que entran en juego hacen poco factible la verificación del mismo. Así, se tiende a considerar que, cuando el robot móvil navega con una velocidad reducida, muchos de los comportamientos no lineales resultan despreciables. Entonces, se toma un modelo de primer orden para caracterizar el cambio de velocidad y de dirección del vehículo [1.17] [1.16].
Es importante el estudio del movimiento del robot en función de su geometría ya que entre las aplicaciones inmediatas se encuentran la posibilidad de utilizarlo como modelo matemático para el diseño del controlador, la simulación del comportamiento cinemático del vehículo, o para establecer las ecuaciones de los cálculos odométricos. Se consideran las siguientes limitaciones para la construcción del modelo cinemático:
• El robot se mueve sobre una superficie plana.
• No existen elementos flexibles en la estructura del robot. (incluidas las ruedas).
• Las ruedas poseen uno o ningún eje de direccionamiento, de manera que este último siempre es perpendicular al suelo.
• No se consideran ningún tipo de fricciones en elementos móviles del vehículo, o contra el suelo.
El comportamiento cinemático se establece en el principio de que las ruedas en contacto con el suelo se comportan como una articulación planar de tres grados de libertad.
La estimación de la posición de un vehículo ha recibido una considerable atención por parte de numerosos investigadores, proponiéndose una gran variedad de técnicas para ello. Estas técnicas varían significativamente en función del tipo de entorno en el cual el robot móvil ha de navegar, del conocimiento que se tenga de este, de la tarea a realizar, y del tipo de sensor con el que el robot está equipado.
La mayoría de los robots móviles van provistos de codificadores en los ejes de movimiento que permiten estimar en cada instante la localización de éste empleando un modelo de locomoción. Sin embargo, esta estimación no resulta suficientemente precisa para la mayoría de las aplicaciones. El motivo no es debido tanto a los errores que éste pudiera cometer sino, fundamentalmente, al hecho de que estos se van acumulando durante la navegación, lo que origina que la región de incertidumbre asociada a la posición y orientación del robot vaya creciendo más y más conforme el robot se mueve De esta forma, cada vez que ésta supere unos determinados límites, el robot necesita de algún sistema de posicionamiento "externo" que reduzca esta incertidumbre. Estos límites vienen impuestos por el tipo de escenario, la naturaleza de la tarea a realizar y la precisión requerida en los movimientos. Asimismo, la precisión alcanzada con el sistema de posicionamiento dependerá de la técnica y del sensor utilizado.
Otras dificultades que se resolvieron son las singularidades en las leyes de control. Para el modelo matemático propuesto, las singularidades ocurren cuando el robot se orienta perpendicularmente a uno de los ejes coordenados, o bien cuando la velocidad lineal del robot es nula.
Los motores presentan una zona muerta; es decir una región en la cual dado un voltaje de control, no se produce desplazamiento alguno.
El posicionamiento se obtiene de manera indirecta usando el modelo cinemático lo cual puede producir un error en la localización real del prototipo.
1.2.2 Como mejora la propuesta a lo existente
Recientemente se ha mostrado que el uso de conceptos y técnicas de la teoría de sistemas pasivos y de la teoría de control geométrica no lineal permiten tener una metodología mas completa para el diseño de estructuras de control en sistemas no lineales [1.18]. Este tipo de conceptos se fundamenta en la ecuación (1.1), que además es la base para algunas técnicas de modelado de sistemas.
dt d
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ + ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ = ⎥ ⎦ ⎤ ⎢
⎣ ⎡
generada erna Potencia
istrada su
externa Potencia
almacenada Energia
int min
Los sistemas pasivos se caracterizan precisamente porque la energía almacenada en el sistema es inferior a la energía externa suministrada al mismo. Por lo tanto, un sistema pasivo es incapaz de almacenar toda la energía que suministra, es decir, un sistema pasivo “gasta” la energía adquirida. Como consecuencia de este hecho, los sistemas pasivos tienen propiedades de estabilidad deseables [1.19]. Estas propiedades están relacionadas con el diseño de estructuras de control simples para estos sistemas. Se ha mostrado, por ejemplo, que los sistemas pasivos que satisfacen una cierta propiedad de “detectabilidad” pueden estabilizarse por medio de una retroalimentación estática de la salida [1.18]. La estabilización de sistemas dinámicos es un paso preliminar importante para lograr objetivos adicionales de control tales como regulación, el seguimiento asintótico de
trayectorias o atenuación de señales de perturbación externas.
En el presente trabajo se representan los conceptos y definiciones de la teoría de sistemas pasivos desde un punto de vista geométrico, la equivalencia por retroalimentación del estado a sistemas pasivos así como algunos resultados básicos sobre la estabilización asintótica de sistemas pasivos por retroalimentación de la salida. Estos conceptos, definiciones y resultados constituyen la base del procedimiento de diseño de reguladores simples.
1.3 Morfología y caracterización de las propiedades funcionales.
Una forma de clasificar los robots es por los factores que caracterizar el comportamiento y las propiedades funcionales que posee. Esto se puede englobar en 4 atributos.
• Movilidad: Muy fuertemente asociada a su morfología indica la capacidad de movimiento y las características de su comportamiento dinámico. Puede referirse al conjunto del robot o limitarse al ámbito de cualquier subsistema estructural del robot (cuerpo, brazos o elementos terminales).
• Gobernabilidad: Capacidad para ser controlado y mandado desde el exterior.
• Autonomía: Facultad de autogobierno.
• Polivalencia: Capacidad para ejecutar con eficacia tareas diferentes.
desde diversos puntos de vista. Por ejemplo, método de locomoción o configuración mecánica. Existen tres tipos de métodos de locomoción terrestre:
[image:26.612.230.396.230.334.2]1.- Ruedas: están bien establecidas como método de soporte para los vehículos. Es la categoría más utilizada. Existe una gran variedad de configuraciones de robots con ruedas, La principal desventaja de esta configuración es que su desempeño no es bueno en terrenos irregulares. Además, si el obstáculo es más grande que el radio de la rueda, no es posible treparlo. En la figura 1.2 se muestra un robot móvil con sistema locomoción con ruedas.
Figura.1.2 Robot autónomo (Soujoner)
2.- Piernas: Una pierna es un sistema de transmisión de movimiento regularmente de dos grados de libertad. En la Figura 1.2 se observa un robot cuadrúpedo que se puede desplazar en terrenos difíciles y esquivar obstáculos
Figura 1.2 Robotic Demining
Figura 1.3 CyberRAVE
1.4 Robótica y Mecatrónica
La introducción de los microprocesadores desde los años 70 ha hecho posible que la tecnología de los robots haya sufrido grandes avances, los modernos ordenadores han ofrecido un "cerebro" a los músculos de los robots mecánicos. Ha sido esta fusión de electrónica y mecánica la que ha hecho posible al moderno robot, los japoneses han acuñado el término "Mecatrónica" para describir esta fusión.
El año 1980 fue llamado "primer año de la era robótica" porque la producción de robots industriales aumentó ese año un 80 % respecto del año anterior.
Los cambios en Robótica se suceden tan rápido que ya se ha pasado de unos robots relativamente primitivos a principios de los 70, a una segunda generación. La primera generación de robots era reprogramable, de tipo brazo, dispositivos manipuladores que sólo podían memorizar movimientos repetitivos, asistidos por sensores internos que les ayudan a realizar sus movimientos con precisión.
La segunda generación de robots entra en escena a finales de los 70, tienen sensores externos (tacto y visión por lo general) que dan al robot información (realimentación) del mundo exterior. Estos robots pueden hacer elecciones limitadas o tomar decisiones y reaccionar ante el entorno de trabajo, se les conoce como robots adaptativos.
Desde el principio de la década de los noventas se han realizado experimentos tecnológicos con robots móviles espaciales que han volado con el trasbordador espacial COLUMBIA [1.27]. Se ha trabajado más concretamente con un robot equipado con multisensores que está instalado en la plataforma de la nave, y trabaja exitosamente en modo autónomo, siendo teleoperado por astronautas, así como también, desde la tierra.
I. 5 Referencias
[1.1] Isidori A. Nonlinear Control Systems, 3rd Ed. Springer Verlag, New York, 1995. [1.2] Slotine J.J. E. y W. Li, Applied Nonlinear Control. Englewood Cliffs, Prentice-Hall,
NJ, 1991.
[1.3] Willems J.C., “The Generation of Lyapunov Functions for Input-Output Table systems”, SIAM J. Contr. And Optimization, vol 9, pp. 105-134, 1971.
[1.4] Willems J.C., “Disipative Dynamical System Part II: Linear System with Quadratic Supplies Rate”, Arch. Rational Mechanics and Analysis, vol. 45, pp. 352-393 1972.
[1.5] Hill D. y P. Moylan, “The Stability of Nolinear Dissipative Systems”, IEEE Trans. On Aut. Contr., vol. 21 pp. 708-711, 1976.
[1.6] Moylan, P.J. “Implications of Passivity in a Class of no Linear Systems”, IEEE Trans. On Aut. Contr., vol. AC-19, pp. 373-381, 1974.
[1.7] Hill D. “ Dissipative Dynamics Systems: Basic Input-Output and State Properties”, J. Franklin Inst, vol. 309, pp. 327-357, 1980.
[1.8] Moylan P.J. “Implications of Passivity in a Class of Nonlinear Systems” IEEE Trans. Aut. Contr., vol. AC-19, pp.373-381, 1974.
[1.10] Byrnes C.I., A. Isidori y J.C. Willems, “Passivity, Feedback Equivalence, and the Global Stabilization of Minimum Phase Nonlinear System”, IEEE Trans. On Contr. vol. 36, pp. 1228-1240, 1991.
[1.11] Serón M., D. Hill y A. Fradkov, “Nonlinear adaptive control of feedback passive system”, Automatica, vol 31, pp. 1053-1060, 1995.
[1.12] D. Cho, Y. Kato y D. Spilmar, “Sliding Mode and Classical Control of Magnetic Levitation System”, IEEE Contr. Syst. Magazine, vol. 13, no. 1, pp 42-48, 1993. [1.13] Ortega R. y M. W. Spong, “On Output Feedback Global Stabilization of Euler
Langrange Systems”, Automatica, vol. 25, pp. 877-888, 1989.
[1.14] Ortega R., A. Loria, R. Kelly y L. Pral., “Adaptive Motion Control of Rigid Robots”, Int. J. Robust Non. Contr., vol 5, pp. 313-324, 1995.
[1.15] Zhao Y., BeMent S-L. Kinematics, Dynamics and Control of Wheeled Mobile Robots. Proc. Of the IEEE International Conference on Robotics and Automation, pp 91-96, 1992 Nice (France).
[1.16] Ollero-Baturone A. Robótica: Manipuladores y Robots Móviles. Marcombo. ISBN 84-267-1313. 2001.
[1.17] Martínez-Rodríguez J.L. Seguimiento Automático de Caminos en Robots Móviles. Tesis Doctoral. Universidad de Málaga. 1994.
[1.18] Byrnes C.I., A. Isidori y J.C. Willems, “Passivity, Feedback Equivalence, and the Global Stabilization of Minimum Phase Nonlinear System”, IEEE trans. on Contr. vol. 36, pp. 1228-1240, 1991
[1.19] Willems J.C., “Disipative Dynamical System Part II: Linear System with Quadratic Supplies Rate”, Arch. Rational Mechanics and Analysis, vol. 45, pp. 352-393 1972.
[1.21] Adam W., Develbiss and John T. Wen., Trayectory Tracking Control of a Car-trailer System, IEEE Transactions on Control Systems Technology, Vol 5, No.3, May 1997.
[1.22] J.M. Yang, J.H. Kim, Sliding Mode Motion Control of Nonholonomic Mobile Robots, IEEE International Conference on Robotics and Automation, Leuven Belgium, May, 1998.
[1.23] C. Canudas de Wit, R. Roskam, Path Following of a 2-DOF Wheeled Mobile Robot Under Path and Input Torque Constraints, Proceeding of the IEEE, International Conference on Robotics and Automation, Sacramento, California, April 1991.
[1.24] K. Tanaka, K. Yoshioka, Fuzzy Trayectory Control and GA-Based Obstacle Avoidance of a Truck with Five trailers, IEEE International Conference on Systems, Man and Cybernetics, 1995.
[1.25] K. Watanabe, J. Tang, M. Nakamura, S. Koga, T. Fukuda, A fuzzy-Gaussian Neural Network and its Application to Mobile Robot Control, IEEE Transaction on Control Systems Technology, Vol 4, No.2, March 1996.
[1.26] A. De luca, G. Oriolo and C. Samson, Feedback Control of a Nonholonomic Car-Like Robot, Lecture Notes in Control and Information Sciences 229, Robot Motion Planning and Control, Springer-Verlag, 1998.
[1.27] K. Landzettel. B. Brunner, G. Hirzinger, "The Telerobot Concepts for ESS". [1.28] D’Andrea-Novel B, Campion G, Bastin G. Control of Nonholonomic Wheeled
Mobile Robots by State Feedback Linearization. Int J Robot Res 1995. [1.29] Brockett RW. Asymptotic Stability and Feedback Stabilization. In: Differential
Geometric Control Theory. Boston: Birkhauser; 1983. pp. 181–91.
[1.30] Kolmanovsky I, McClamroch NH. Developments in Nonholonomic Control Problems. IEEE Control System 1995.
[1.31] Wu Wei-Guo, Chen Hui-Tang, Wang Yue-Juan. Global Trajectory Tracking Control of Mobile Robots. Acta Autom. Sin. 2001.
[1.32] Li Shi-Hua, Tian Yu-Ping. Tracking Control of Mobile Robot. Control and Decision 2000.
CAPÍTULO II
FUNDAMENTACIÓN TEORICA
2.1 Pasividad y Equivalencia a Sistemas Pasivos.
En el estudio de los sistemas físicos, tales como un sistema mecánico o una red eléctrica, se utiliza frecuentemente el concepto de almacenamiento de energía para poder comprender el comportamiento de los mismos. Se puede decir, en general, que la dinámica de un sistema físico satisface el principio de la conservación de la energía representando por medio de la ecuación [2.1]
dt d
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ + ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ = ⎥ ⎦ ⎤ ⎢
⎣ ⎡
generada erna Potencia
ada proporcion externa Potencia
almacenada Energía
int
Este tipo de ecuaciones son, además, la base para algunas técnicas de modelado de sistemas.
Los sistemas pasivos se caracterizan precisamente porque la energía almacenada en el sistema es inferior a la energía externa suministrada al mismo. Por lo tanto, un sistema pasivo es incapaz de almacenar toda la energía que suministra, es decir, un sistema pasivo “gasta” la energía adquirida. Como consecuencia de este hecho, los sistemas pasivos tienen propiedades de estabilidad deseables [2.2]. Estas propiedades están relacionadas con el diseño de estructuras de control simples para estos sistemas. Se ha mostrado, por ejemplo, que los sistemas pasivos que satisfacen una cierta propiedad de “detectabilidad” pueden estabilizarse por medio de una retroalimentación estática de la salida [2.3]. La estabilización de sistemas dinámicos es un paso preliminar importante para lograr objetivos adicionales de control tales como regulación, el seguimiento asintótico de trayectorias o atenuación de señales de perturbación externas.
Recientemente se ha mostrado que el uso de conceptos y técnicas de la teoría de sistemas pasivos y de la teoría de control geométrica no lineal permiten tener una metodología más completa para el diseño de estructuras de control en sistemas no lineales [2.3].
retroalimentación de la salida. Estos conceptos, definiciones y resultados constituyen la base del procedimiento de diseño de reguladores simples.
En la sección 2.1 se revisan los conceptos de disipatividad y pasividad para una clase de sistemas no lineales, en la sección 2.2 se dan las condiciones para que un sistema no lineal de una clase considerada pueda ser equivalente a un sistema pasivo mediante retroalimentación estática de los estados. Finalmente, en la sección 2.3 se describen algunos resultados sobre la estabilización de sistemas pasivos. El material presentado está basado, principalmente, en los trabajos de Byrnes et al [2.3], Hill y Moylan [2.4] y Willems [2.5].
2.2 Sistemas Pasivos
En esta sección se dán algunos conceptos básicos relacionados con las nociones de disipación y pasividad. Considérese el sistema no lineal descrito por
) (
, ) ( ) (
x h y
u x g x f x
=
+ =
⋅
(2.1)
Donde el estado , la entrada , la salida . f y las m columnas de g son campos vectoriales suaves y h es un mapeo suave. Se supone, también, que el campo vectorial f tiene un punto de equilibrio en el origen, i.e. , y que Sea, además, U el conjunto de entradas admisibles al sistema consistente de todas las funciones continuas por segmentos definidas sobre ℜ y que toman valores de U.
n X
x∈ =ℜ u∈U =ℜm y∈Υ =ℜm
0 ) 0
( =
f h(0)=0.
Sea una función real definida sobre UxY, llamada razón de suministro. Esta función constituye una abstracción del concepto de “potencia de entrada”. Se asume que para cualquier
w
U
u∈ y para toda x =x ∈ℜn , la salida )
0 ( 0
(
, ,)
) ()
(t h t x0 u
y = φ del sistema (2.1), es tal que w(δ)= w(u(δ),y(δ))satisface . 1
∫
<∞t
d w 0
)
(δ δ ∀t ≥0
Definición 2.1.1 : Un sistema de la forma (2.1) con razón de suministro w es llamado disipativo si existe una función no negativa , llamada función de almacenamiento, tal que para toda
0
C V :X →ℜ
0 , , 0 ∈ℜ ≥
∈U x t
u n
∫
≤−V x t w d
x V 0 0 ) ( ) ( )
( δ δ (2.2)
La relación (2.2) se conoce como desigualdad de disipación y expresa el hecho de que la energía almacenada V(x(t)) del sistema (2.1) en un tiempo t es, a lo más, igual a la suma de la energía almacenada en y de la energía suministrada internamente, durante el intervalo de tiempo [0,t]. Es decir, no hay “ creación de energía interna”, solo es posible tener disipación interna de energía. La siguiente definición caracteriza la noción de almacenamiento disponible, la cual juega un papel importante en determinar si es disipativo o no.
)), 0 ( ( ) ( ,
0V x0 V x
t = =
∫
t w d 0, ) (δ δ
Definición 2.1.2 : El almacenamiento disponible, denotado por , de un sistema (2.1) con razón de suministro w es la función
a V
ℜ →
X
Va : definido por
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − =
∫
≥∈ = t t U ux xa x w d
V 0 0 ) ( sup ) ( 0 δ
δ (2.3)
El almacenamiento disponible puede ser interpretado como la máxima cantidad de energía que puede ser extraída del sistema (2.1). Es importante notar que el almacenamiento disponible es no negativo, ya que es el supremo sobre un conjunto de números que contienen al elemento cero. En [2.5] se muestra que si un sistema (2.1) con razón de suministro w es disipativo, entonces el almacenamiento disponible es finito para cada y, además, cualquier posible función de almacenamiento V satisface
) (x Va 0 ≥ a V ) (x
Va x∈ℜn
) ( ) (
0≤Va x ≥V x
para cada . Por otro lado, si es , entonces es en si misma una posible función de almacenamiento. De igual manera, si es y finita para cada , entonces el sistema (2.1) es disipativo.
X
x∈ Va C0
a V
) (x
Va 0
C X
Una selección importante de razón de suministro es la dada por el producto interno
u y y u
w= = T
,
En lo que sigue se considerara esta selección. Es importante notar que, en caso más general en que se pueda asociar al sistema (2.1) una razón de suministro [2.4]
), dim( )
dim(u ≠ y
Ru u Su y Qy y y u
w = T + T + T
2 )
, (
donde Q, S y R son matrices constantes de dimensiones apropiada con Q y R simétricas.
Definición 2.1.3 : Un sistema (2.1) es pasivo, si este es disipativo con razón de suministro w= u y = yTu
, y la función de almacenamiento V satisface V(0)=0. Esto es, un sistema (2.1) es pasivo si existe una función no negativa
la cual satisface V(0)=0 de tal manera que
0 C
ℜ → Χ
: V
V x −V x ≤
∫
t yT u d (2.4)0 0
. ) ( ) ( )
( )
( δ δ δ
A partir de esta definición se puede ver que, cuando u =0,V es decreciente a lo
largo de cualquier trayectoria no forzada de (2.1); por lo tanto, un sistema pasivo que tiene una función de almacenamiento V definida positiva es estable en el sentido de Lyapunov. De igual manera, V es también decreciente a lo largo de cualquier trayectoria de (2.1) dinámica ser de un sistema [2.6], se puede decir que los sistemas pasivos que tiene una función de almacenamiento V definida positiva tienen una dinámica cero estable en el sentido de Lyapunov.
Algunas veces es conveniente identificar aquellos sistemas correspondientes a las situaciones en las que las desigualdades toman la forma de una igualdad o (hablando en forma general) de una desigualdad estricta. Estas clases se caracterizan por medio de las siguientes definiciones.
Definición 2.1.4 : Se dice que un sistema pasivo de la forma (2.1) con función de almacenamiento V es sin pérdidas, si para toda u∈U,x0∈ℜn,t ≥0
V x −V x ≤
∫
t yT u d (2.5)0 0
. ) ( ) ( )
( )
Definición 2.1.5 : Un sistema pasivo de la forma (2.1) con función de almacenamiento v es estrictamente pasivo si existe una función definida positiva
tal que para toda
ℜ →
X
S: u∈U,x0∈ℜn,t ≥0
∫
−∫
≤
−V x t yT u d tS x d
x V
0 0
0
)) ( ( )
( ) ( )
( )
( δ δ δ δ δ (2.6)
Los sistemas pasivos están relacionados con los sistemas reales positivos. Más precisamente, un sistema descrito por (2.1) es real positivo si para toda u∈U,t ≥0
∫
≤ t yT u d
0
. ) ( ) (
0 δ δ δ
cuando x(0)=0.
En el caso de un sistema lineal se puede ver, a partir de la identidad de Parseval, que la desigualdad anterior, para t =∞, es equivalente a la no negatividad de la parte real de la función de transferencia del sistema sobre el eje imaginario (vease por ejemplo,[ 2.1], Capitulo 4, sección 4.7.2, pp. 137-138). En forma mas general, y a partir de un argumento basado en la transformación de integrales, se sigue que la desigualdad anterior, para toda t no negativa, es equivalente a la real positiva de la función de transferencia, es decir, la función de transferencia es analítica y tiene parte real no negativa en el semiplano derecho (vease también el Apéndice A donde se encuentra un resumen de los conceptos de real positividad y pasividad en sistemas lineales invariantes en el tiempo).
La relación entre sistemas pasivos y sistemas reales positivos depende de la propiedad de que la realización en variables de estado de un sistema sea alcanzable a partir del punto de equilibrio . Un sistema disipativo (2.1) con razón de suministro es real positivo si y solo si su almacenamiento disponible satisface además, un sistema pasivo es real positivo. De igual manera, si un sistema es real positivo, su almacenamiento disponible es finito en cada x que es alcanzable desde el origen; por lo tanto, un sistema real positivo en el cual cualquier estado es alcanzable desde el origen y es pasivo [2.3].
2 0 =
x u
y w= T
; 0 ) 0 ( = a V
a
V
Una interpretación interesante de la desigualdad (2.4) se da en el siguiente resultado relacionada con la propiedad de Kalman-Yacubovitch -Popov (KYP). Proposición 2.1.1 : Sea el sistema (2.1), es pasivo con función no negativa
con V(0)=0, tal que
1 C
) ( )
(
, 0 ) (
x h x V L
x V L
T g
f
= ≤
(2.7)
para toda , entonces el sistema (2.1), es pasivo con función de almacenamiento V. De igual manera, un sistema (2.1) pasivo que tenga una función de almacenamiento satisface las desigualdades (2.7).
X x∈
1 C
Las desigualdades (2.7) se conocen también como condiciones de Kalman-Yacubovitch -Popov (KYP) y un sistema (2.1) que la satisfaga se dice que tiene la propiedad KYP.
Observación 2.1.1 : Sea un sistema lineal invariante en el tiempo descrito por
(2.8)
Cx y
Bu Ax x
= + = ⋅
,
donde el espacio de estados x∈ℜ, la entrada , la salida , y A,B,C son matrices constantes de dimensiones (n x n), (n x m), y (m x n) respectivamente. El sistema (2.8) es pasivo si y solo si existe una matriz simétrica definida positiva P tal que
m
u∈ℜ m
y∈ℜ
(2.9) T
T
C PB
0 PA P A
=
≤ +
Aún más, la función
Px x 2 1 ) x (
V = T
define una función cuadrática de almacenamiento para el sistema lineal (2.8) si y solo si P satisface las desigualdades en (2.9). Estas desigualdades constituyen las condiciones KYP para un sistema lineal e invariante en el tiempo [2.2].
Observación 2.1.2: En un sistema sin pérdidas con una función de almacenamiento V que es se tiene que 1
C
0 ) (x = V
Lf (2.10)
para toda , y en un sistema estrictamente pasivo con una función de almacenamiento que es se tiene que
ℜ ∈ x
1
C
) ( )
(x S x
V
para toda , es decir es definida negativa. Por tanto, en particular, si un sistema es estrictamente pasivo con una función de almacenamiento definida positiva, su punto de equilibrio es asintóticamente estable.
ℜ ∈
x LfV(x)
Figura 2.1: Sistema pasivo no lineal con una entrada y una salida.
Ejemplo 1:Sea el sistema masa-resorte-amortiguador representado por el sistema no lineal
F
d
d
d
d
m
+
2 3+
7=
)
(
&
&
&
donde d es la posición del cuerpo de masa m y F es la fuerza aplicada al mismo. Al hacer la asignación x1 =d, x2 =d&, u=F y seleccionar como salida a la velocidad d, el sistema puede escribirse en la forma (2.1) con
(
x x x)
,m 1 x ) x ( f 7 1 3 2 2 1 2 ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ + − = , m 1 0 ) x ( g ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛
= h ( x ) = x 2
donde 2 .
2
1,x )
x ( col
x = ∈ℜ
Si se escoge como función de almacenamiento a la energía total almacenada (energía cinética mas energía potencial), es decir
8 1 2 2 8 1 2 1 )
(x mx x
V = +
se tiene que 4, de donde
2 2 1 )
(x yu x x
V& = −
) ( ) ( , 0 )
( 12 24
x h x V L x x x V L g f = ≤ − =
para toda . Entonces el sistema masa-resorte-amortiguador es pasivo al tomar como entrada la fuerza externa F y como salida la velocidad d.
2
Ejemplo 2: Considere el sistema descrito por (2.1) donde x∈ℜ,u∈ℜ,y∈ℜ, h(x) es una función del mismo signo que su argumento y
, x ) x ( ) x (
f =−λ
g
(
x
)
=
1
donde λ(x)≥0, para toda x∈ℜ. Si se escoge la función de almacenamiento
( )
=∫
x γ γ0
d ) ( h x
V
se tiene que V&
( )
x =yu−λ( ) ( )x
x hx , y( )
( ) ( )
( )
x h( )
x VL
, 0 x x h x x
V L
g f
=
≤ λ
− =
Figura 2.2: Circuito RLC
Para toda . Entonces el sistema considerado, que puede verse como un filtro no lineal en cascada con una función no lineal x (veas la Fig. 2.1), es pasivo. x∈ℜ
Ejemplo 3: Considérese ahora el circuito RLC de la Fig. 2.2 cuyo comportamiento dinámico puede ser descrito por las ecuaciones
∫
=
+ =
ξ
ξ d
i C
Vc
Ri dt
di L V
c
L L
) ( 1
Al hacer la asignación x1 =iL,x2 = vc,u= i y seleccionar como salida al voltaje ,
estas ecuaciones pueden escribirse en la forma (2.8) con
c
v
(
)
∈ℜ+ ℜ+=colx ,x x
⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎜ ⎝ ⎛ − − = 0 C 1 L 1 C R A , ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = C 1 0
B , C=(0 1)
Al escoger como función de almacenamiento a la suma de la energía almacenada en el capacitor y en la bobina, es decir,
( )
(
)
x Px2 1 Cx Lx 2 1 x
V 2 T
2 2
1 + =
= donde ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = C 0 0 L P
es una matriz simétrica y definida positiva, se tiene que
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = + 0 0 0 R 2 PA P AT
la cual es semidefinida negativa (la resistencia r es positiva) y
T
C 1 0 PB ⎟⎟=
⎠ ⎞ ⎜⎜ ⎝ ⎛ =
Figura 2.3: Circuito LC
Por lo tanto el circuito eléctrico de la Fig. 2.2 con entrada u = i y salida y =v es pasivo. Es interesante notar que la derivada con respeto al tiempo de la función de almacenamiento dada por
( )
21
Rx yu
x
V& = −
el término 2 corresponde a la energía disipada en la resistencia.
1
Rx −
⎟ ⎟ ⎟ ⎟
⎠ ⎞
⎜ ⎜ ⎜ ⎜
⎝ ⎛
− − =
0 C 1 L
1 C R
A ,
⎟ ⎟ ⎟
⎠ ⎞
⎜ ⎜ ⎜
⎝ ⎛ =
C 1 0
B , C=(0 1)
Al escoger, de igual manera, la misma función de almacenamiento, se tiene que
0 PA P
A T + =
y . Es decir, el circuito eléctrico LC de la Fig. 2.3 con entrada u = i y salida y = v es sin perdidas. Este es un resultado esperado ya que al no tener resistencia en el circuito, no hay disipación de energía
T
C PB=
(V&(x) = yu ).
Observación 2.1.3: Considérese un sistema de la forma (2.1), pero con salida no especificada, y supóngase que existe una función no negativa , con V(0)=0, tal que
R X : V →
( )
x 0 VLf ≤ . En la literatura se ha estudiado ampliamente el problema de estabilizar esta clase de sistemas usando una retroalimentación de estados de la forma
( )
[
]
TgV x
L u = −
A partir de la proposición 2.1.1, se puede observar que esta ley de control se puede interpretar como una retroalimentación negativa de la salida con ganancia unitaria, u=-y, impuesta sobre el sistema pasivo definido por con salida
( ) ( )
x gx uf x& = +
( )
[
]
TgV x
L y =
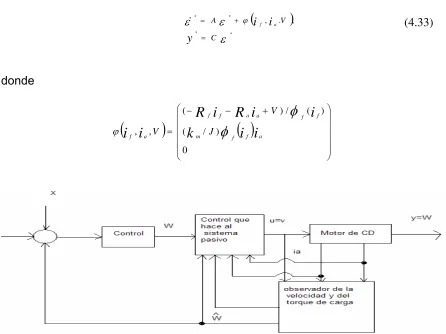
2.3 Equivalencia por Retroalimentación del Estado a Sistema Pasivo.
En esta sección, se presentan algunas condiciones bajo las cuales un sistema dado se puede hacer pasivo, con una función de almacenamiento definida positiva V(x), por medio de una retroalimentación estática del estado. Ya que la propiedad de que un sistema sea de fase mínima, juega un papel importante, se recordará brevemente como es que se caracteriza a los sistemas no lineales de fase no mínima. La mayoría de los conceptos y resultados presentados aquí han sido tomados de [2.1, 2.6].
Se dice que un sistema de la forma (2.1) tiene un (vector ) de grado relativo
{ }
1,...,1en x=0 si la matriz es no singular [2.6]. Si este es el caso, es posible encontrar n-m funciones reales
) 0 ( h Lg
( )
x,..., n m( )
x1 η−
( )
( )
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
η
η
=
η
−x
.
x
m n 1 (2.13) En las nuevas coordenadas( )
η,y , el sistema está representado por ecuacionesque tienen la siguiente estructura
( ) ( )
( ) ( )
,y a ,y ub y , u y , d y , c η + η = η + η = η & & (2.14)
donde a
(
η,y)
es no singular para toda( )
η,y cerca de (0,0). Al aplicar unaretroalimentación de la forma
( )
[
a ,y]
[
b( )
,y v]
u= η −1 − η + (2.15)
donde v es una nueva entrada, el sistema (2.14) queda descrito por
(
)
(
)
v y v y , y , = η γ + η θ = η && (2.16)
Si ahora se introduce el cambio de variables adicionales [2.3]
( )
,y y,z = η − γ η (2.17)
el sistema (2.16) queda como
( ) ( )
(
( ))
v y , v y , z q y y , z p z f z m 1 i i = + + ∗ = ∑ = & & (2.18) donde p(z,y) y lasq
i(
z
,
y
)
son matrices de dimensiones apropiadas.La dinámica cero de un sistema describe aquella dinámica interna que es consistente con las restricción externa y=0 [2.6]. Si un sistema de la forma (2.1) tiene un (vector) de grado relativo
{ }
1,...,1 en x=0, su dinámica cero existelocalmente en una vecindad de x=0, evoluciona en una superficie de dimensiones n-m definida por
− X
( )
{x X : h x 0}