Modelación de un amortiguador magneto reológico
132
0
0
Texto completo
(2) INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY. ESCUELA DE INGENIERÍA Y TECNOLOGÍAS DE INFORMACIÓN. TECNOLÓGICO DE MONTERREY. MODELACIÓN DE U N AMORTIGUADOR MAGNETO-REOLÓGICO TESIS P R E S E N T A D A C O M O REQUISITO P A R C I A L P A R A O B T E N E R E L G R A D O ACADÉMICO D E :. MAESTRO E N CIENCIAS CON ESPECIALIDAD EN AUTOMATIZACIÓN POR:. MARTÍN MIGUEL LÓPEZ NÚÑEZ M O N T E R R E Y , N U E V O LEÓN, M É X I C O , 15 D E M A Y O D E L 2012.
(3) Copyright © por Martín Miguel López Núñez, 2012. II.
(4) INSTITUTO TECNOLÓGICO Y D E ESTUDIOS SUPERIORES D E M O N T E R R E Y DIVISIÓN D E MECATRÓNICA Y TECNOLOGÍAS D E INFORMACIÓN P R O G R A M A D E G R A D U A D O S E N MECATRÓNICA Y TECNOLOGÍAS D E INFORMACIÓN. Los miembros del comité de tesis recomendamos que la presente tesis del Ing. Martín Miguel López Núñez sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias con Especialidad en Automatización.. Comité de Tesis. Dr. Rubén Morales Menéndez Asesor. Dr. Federico Guedea Elizalde Sinodal. Dr. Horacio Ahuett Garza Sinodal. Dr. Gerardo Castañón Avila Director de las Maestrías en Ciencias en Electrónica y Automatización. 15 de Mayo del 2012. III.
(5) MODELACIÓN DE UN AMORTIGUADOR MAGNETO-REOLÓGICO. POR. MARTÍN MIGUEL LÓPEZ NÚÑEZ. TESIS. PRESENTADA A L A E S C U E L A D E INGENIERÍA Y TECNOLOGÍAS D E L A INFORMACIÓN. C O M O REQUISITO PARCIAL PARA OBTENER E L G R A D O ACADÉMICO D E. MAESTRO EN CIENCIAS ESPECIALIDAD EN. AUTOMATIZACIÓN. INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY CAMPUS MONTERREY. M O N T E R R E Y , N U E V O LEÓN, M É X I C O , 15 D E M A Y O D E L 2012. IV.
(6) Agradecimientos Quisiera agradecer a mi asesor de tesis el Dr. Rubén Morales-Menéndez, por su enseñanza, paciencia y confianza otorgada en la realización de este proyecto.. Quisiera agradecer a mis sinodales, Dr. Federico Guedea y Dr. Horacio Ahuett, por las sugerencias y las revisiones brindadas a este trabajo de tesis.. Quisiera agradecer a mis compañeros de trabajo, Jorge Lozoya, Juan Carlos Tudón y Carlos V i vas, por su amistad y las aportaciones brindadas en este trabajo, sin su apoyo hubiera resultado muy difícil realizar este documento tan completo.. v.
(7) Dedicatoria. A Dios: Gracias por todas las bendiciones que has traído a mi vida. Tu gracia y misericordia siempre han estado presentes en todo momento.. A mis padres: Martín y Susana Siempre me han brindado un apoyo incondicional. Gracias por su gran amor y estar a mi lado. Lo que he logrado ha sido gracias a ustedes.. A Bris Hemos pasado momentos maravillosos juntos. Gracias por todo tu apoyo, la confianza y la motivación que has brindado en mi vida. Te quiero!.. A mi familia. Gracias a mis hermanos, tíos y abuelos, por su apoyo, cariño y amor. Han sido una fuente de inspiración para mí.. VI.
(8) Resumen. A pesar de que se ha realizado mucha investigación en amortiguadores semi-activos, la mayoría de los estudios que se han llevado a cabo, han demostrado que es necesario mejorar las bases de la modelación y control, para satisfacer las expectativas de los sistemas de control de confort y maniobrabilidad del vehículo. En este trabajo, se comparan los modelos que se han publicado a la fecha, para su implementación en el control semi-activo del sistema de suspensión del vehículo, basado en amortiguadores con fluidos Magneto-Reológicos (MR). Sin embargo, detrás de las aplicaciones de estos dispositivos, surge el comportamiento complejo de la no l i nealidad de la fuerza-desplazamiento y la histéresis de la fuerza-velocidad, cuyo aumento se ve reflejado ante la presencia de la corriente eléctrica. Los modelos propuestos en esta investigación, poseen una dependencia de la corriente eléctrica, con el propósito de obtener una representación completa del comportamiento del amortiguador MR. En la caracterización del comportamiento de este dispositivo semi-activo, se llevaron a cabo una serie de pruebas experimentales, conformadas por patrones de entrada de desplazamiento y corriente, con la finalidad de lograr un buen aprendizaje del modelo. Los modelos identificados con las secuencias de entrenamiento, son evaluados en su desempeño de manera cuantitativa y cualitativa, para los diferentes anchos de banda de frecuencias, demostrando que ciertos modelos son efectivos para determinadas frecuencias en el rango de trabajo del amortiguador. En cuanto a la selección de los coeficientes adecuados, se realiza un análisis de validación cruzada, con el propósito de obtener los modelos que permiten una mejor estimación de la fuerza experimental en el amortiguador. Ante la viabilidad de cada modelo para su implementación en un modelo de cuarto de vehículo, se emplean tres estrategias de control comúnmente utilizadas en la literatura: SkyHook (SH), GroundHook (GH) e Híbrido (H). L a validación de los modelos en los controladores, es determinada por la respuesta en el dominio de la frecuencia del cuarto del vehículo, ante las señales de entrada que simulan un perfil del camino. E l comportamiento de cada modelo, en un sistema de control, permite la evaluación de los modelos para la simulación de la suspensión semi-activa. Se utilizó la plataforma de simulación de dinámica de vehículos: CarSim. Como resultado, se logró un control favorable de la suspensión semi-activa de un vehículo tipo sedán clase F. L a mejora sobre la suspensión pasiva tradicional, se orienta principalmente hacia el confort de los pasajeros. E l modelo de red neuronal con el controlador SH, ofrece buenos resultados para las pruebas orientadas a maniobrabilidad: 2% y 10% en la reducción del valor Root Mean Square (RMS) para el desplazamiento y la aceleración vertical de la suspensión, respectivamente. Dicha configuración puede elegirse para representar el control semi-activo de una suspensión independiente en las cuatro esquinas del vehículo. Por otro lado, en una prueba de análisis de confort, el modelo de Cesmeci (mAlg) con el controlador SH, muestra que la inclusión de la aceleración como entrada en un modelo, permite obtener un buen desempeño: 2 % en la reducción del valor RMS para el desplazamiento y el movimiento de cabeceo de la suspensión.. VII.
(9) Índice general 1. Introducción. 1. 1.1. Tecnología. 1. 1.1.1.. Sistemas de amortiguamiento. 2. 1.1.2.. Amortiguadores Magneto-Reológicos MR. 3. 1.2. Descripción del problema. 4. 1.3. Propuesta de Tesis. 5. 1.4. Estructura de la Tesis. 6. 2. Revisión Bibliográfica. 7. 2.1. Modelación de MR Dampers. 2.2.. 2.3.. 7. 2.1.1.. Modelos paramétricos dinámicos. 2.1.2.. Modelos no paramétricos dinámicos. 14. 8. 2.1.3.. Resumen. 15. Diseño de Experimentos. 16. 2.2.1.. Configuración de la prueba experimental. 16. 2.2.2.. Caracterización experimental para las pruebas del amortiguador MR. 18. 2.2.3.. Resultados. 18. Identificación del amortiguador. 20. 2.3.1.. Métodos de optimización para la identificación no lineal. 20. 2.3.2.. Validación de los modelos. 20. 2.4. Controladores. 22. 2.4.1.. Controladores continuos. 23. 2.4.2.. Controladores On/Off. 24. 2.4.3.. Medidades de desempeño de los algoritmos de control. 26. 3. Resultados 3.1.. 28. Simulación de amortiguadores MR. 28. 3.1.1.. 29. Simulación de los modelos algebraicos. 3.1.2.. Simulación de los modelos basados en ecuaciones diferenciales ordinarias. 34. 3.1.3.. Simulación de los modelos de caja negra. 35. 3.1.4.. Análisis de los resultados de simulación de los modelos propuestos. 36. 3.1.5.. Resultados de las pruebas de validación cruzada. 37. 3.1.6.. Resumen de los resultados de modelación. 42. VIII.
(10) 3.2. Diseño de los controladores. 43. 3.3.. 46. Simulación de estrategias de control. 4. Simulación. 55. 4.1.. Descripción del software C a r S i m ™. 55. 4.2.. Configuración de la simulación del vehículo en CarSim. 57. 4.3.. Escenarios de validación en CarSim. 59. 4.4.. Variables de entrada-salida al CarSim. 61. 4.5.. Descripción de la simulación del amortiguador y los modelos. 61. 4.6.. Gráficos de comparación en el tiempo. 62. 5. Análisis y discusión de resultados 5.1.. 64. Resultados de la prueba Bounce Sine Sweep. 64. 5.2. Resultados de la prueba Fishook. 65. 5.3. Resultados de la prueba Double Line Change. 68. 5.4. Resumen de los resultados obtenidos. 71. 6. Conclusiones 6.1.. 75. Trabajo Futuro. 77. Apéndices. 81. A.. 82 82. A . 1. Descripción de variables y acrónimos B.. 86 B . 1. Características de las secuencias de entrenamiento. 86. B. 1.1. Secuencias de entrenamiento basadas en desplazamiento. 86. B. 1.2. Secuencias de entrenamiento basadas en corriente eléctrica. 89. B. 2. Secuencias de entrenamiento utilizadas en la experimentación. 91. C. 1. Resultados de los análisis de los planos característicos. 93. C.. 93 C. 1.1. Gráficas de los planos característicos. 93. D.. 95 D. 1. Configuración de los modelos basados en ecuaciones diferenciales ordinarias. 95. E. 1. Resultados de validación de los índices de desempeño. 98. E.. 98 E. 1.1. Comparación de los resultados del ESR, RMSE y RMSSE. F.. 98 104. F. 1. Análisis del ajuste a las diferentes frecuencias de los modelos. IX. 104.
(11) G.. 109 G.1. Figuras y parámetros del amortiguador para análisis de la respuesta en lazo abierto. H. Currículum Vitae. 109 121. x.
(12) Capítulo 1. Introducción E l sistema de suspensión es uno de los componentes en la dinámica de un vehículo. Su diseño ha sido explorado extensivamente durante las dos últimas décadas. Con el desarrollo de la tecnología electrónica, los requerimientos de mejora en el manejo, estabilidad y seguridad, son los mayores objetivos de desarrollo en los vehículos modernos para satisfacer las expectativas de los clientes. Es bien sabido que el sistema de suspensión es importante para el manejo confortable y la maniobrabilidad del vehículo. Por consiguiente, el diseño de un sistema de suspensión apropiado es siempre un tópico de investigación importante para alcanzar la calidad deseada en el manejo del vehículo. E l amortiguador es un elemento clave del sistema de suspensión. Tradicionalmente asociado a la absorción de impactos, sólo realiza esta tarea en parte. L a necesidad de mejores amortiguadores crece debido a los movimientos de balanceo (roll) y cabeceo (pitch) asociados a la maniobravilidad del vehículo, y la desigualdad del camino. Estos dispostivos, sirven el propósito de disipar energía del movimiento vertical de las ruedas y el cuerpo. Actualmente, la tecnología de amortiguadores variables (amortiguadores electro-hidraúlicos,. magneto-reológicos,. de aire, etc.) ha venido a ser mas confiable y. menos costosa. Se ha venido realizando un gran impulso en la investigación académica e industrial en esta área. M u chos vehículos de alto nivel, se encuentran equipados con suspensiones que utilizan amortiguadores variables, por esta razón el futuro de las suspensiones que utilicen estos sofisticados dispositivos de control de amortiguamiento, pueden ser una alternativa importante en comparación con las suspensiones clásicas que se encuentran conformadas solo de componentes pasivos.. 1.1.. Tecnología. A lo largo de los años los investigadores han trabajado en diseñar sistemas de suspensión, cada vez mejores y más confiables para la industria automotriz. En su diseño, se han considerado varias medidas cualitativas para alcanzar el rendimiento deseado. Entre ellas, el confort y la estabilidad, surgen como características muy importantes en la conducción de un automóvil. Sin embargo, estos dos criterios causan un conflicto al tratar de obtenerse de manera simultánea. Por un lado, se desea tener un manejo suave que permita a los ocupantes del vehículo, sentirse lo más confortable que se pueda, sin verse afectados por el movimiento del vehículo sobre el camino. Por otro lado, un manejo fuerte (buena estabilidad o agarre) también es requerido para que el neumático se mantenga en contacto con el suelo durante maniobras extremas, incrementando las características de agarre y seguridad del vehículo. Cuando se considera una suspensión pasiva que utiliza solamente elementos pasivos, el manejo suave solo. 1.
(13) 2 se realiza utilizando un amortiguador con un coeficiente de amortiguamiento relativamente bajo; mientras que un manejo fuerte es implementado con la ayuda de un coeficiente de amortiguamiento relativamente grande. Debido a que ambos coeficientes no se pueden realizar simultáneamente, los manufactureros de amortiguadores realizaron un compromiso, cuando se considera la tarea primordial que debe desempeñar la suspensión. Los componentes activos y semi-activos, surgen de la necesidad de adaptar el sistema de suspensión a las condiciones de manejo. Agregando un amortiguador o resorte variable, se realiza una mejora en el confort y la seguridad, comparado con el montaje de la suspensión con propiedades fijas. Una suspensión puede ser primero reducida a lo así llamado modelo de un cuarto de vehículo, mediante la consideración de las dinámicas verticales y tomando en cuenta la simetría del vehículo [5]. Actualmente la producción mundial de amortiguadores para vehículos, se estima alrededor de 50 a 100 millones de unidades por año, con un valor de venta que excede por lo menos mil millones de dólares [5]. E l propósito de este componente tan importante en la mejora del vehículo, se enfoca en disipar cualquier energía en el movimiento vertical del cuerpo o las llantas, derivado de las entradas de control, o la perturbaciones asociadas por la desigualdad de los caminos. Como una aglomeración de masas y resortes, el vehículo con sus llantas constituye un sistema de vibración que necesita de amortiguadores para optimizar el control del comportamiento, previniendo la respuesta a sobretiros, y minimizando la influencia de algunas resonancias inevitables. Como consecuencia de la disponibilidad de la confiabilidad y eficiencia de los componentes electrónicos, los diseñadores de vehículos están comenzando a usar diferentes sistemas automáticos de control, para probar la calidad del vehículo y el desempeño económico. Específicamente, una de las mejores en los sistemas de suspensión de los vehículos, se basa en la aplicación de los sistemas de control de vibración activos y semi-activos.. 1.1.1.. Sistemas de amortiguamiento. Los sistemas de suspensión se encuentran clasificados de acuerdo a tres categorías: pasivas, activas y semiactivas [13]. En la Figura 1.1 se puede visualizar las mejoras en comparación con el sistema de suspensión pasiva, al igual que los rangos de frecuencia típicos sobre los que opera el actuador. E l sistema de suspensión pasiva consiste de 2 componentes clave que tratan de absorber las desigualdades del terreno, un elemento disipador de energía, que es el amortiguador, y un elemento de almacenamiento de energía, que es el resorte. Debido a que estos dos elementos se encuentran fijos y no pueden agregar energía al sistema, este tipo de suspensiones son denominadas pasivas. Es decir, el amortiguador no es más que una unidad sellada que no posee entradas externas para cambiar sus características pasivas. Algunos amortiguadores pasivos poseen diferentes configuraciones, cambiables a través de la manipulación mecánica del amortiguador. Dependiendo de su configuración y arquitectura, existen amortiguadores pasivos monotubos y bitubos [5]. Por otro lado, los sistemas de suspensión semi-activa, tienen una actuación a tiempo real para la disipación energía. Esta se logra a través de un amortiguador con coeficientes de amortiguamiento variables, que se adaptan a las demandas actuales de fuerza necesaria. Los coeficientes pueden ser continuamente variados dentro de cierto rango, o pueden tener ajustes discretos. Una suspensión activa tiene la habilidad de almacenar, disipar y agregar energía a las masas. Un conjunto de sensores monitorean continuamente las condiciones de operación del vehículo. Basado en las señales, se habilitan actuadores neumáticos o hidráulicos, que permiten el amortiguamiento en rangos variables. Debido a que también facilitan la introducción de energía al sistema, no pueden seguir siendo tomados en cuenta como amortiguadores. Los sistemas de suspensión activos y semi-activos tienen el potencial de incrementar el confort, rendimiento y seguridad del vehículo. Por ejemplo, un sistema de suspensión activa puede incrementar el confort mediante.
(14) 3. Introducción. Figura 1.1: Clasificación de los sistemas de suspensión. Frecuencias naturales del cuerpo fB y la rueda fw [13].. la reducción de la aceleración experimentada por la masa suspendida, y por consiguiente, por los ocupantes del vehículo. Una suspensión semi-activa puede incrementar el rendimiento y la seguridad del vehículo minimizando la fluctuación de la fuerza normal con el pavimento. A pesar del diseño y el control de las suspensiones activas, estas han resultado bastante complejas para el control de la suspensión, tanto la ubicación del actuador entre las masas suspendidas, como la considerable potencia del actuador hidráulico para operar (varios K W ) . E l sistema requiere mucho mantenimiento. Como una alternativa, se han desarrollado los sistemas de suspensión semi-activa, los cuales poseen la ventaja de un bajo costo, simplicidad del sistema, fácil implementación, y consumo bajo de energía [20].. 1.1.2.. Amortiguadores Magneto-Reológicos MR. Recientemente, se ha mostrado un mayor interés en los amortiguadores de materiales inteligentes [7,12,20,31, 43]. Los materiales usados son reológicos en naturaleza, lo que significa que el fluido de operación (el cual remplaza al aceite convencional) contiene partículas polarizables de tamaño micrométrico, que se alinean formando cadenas de estructuras cuando se aplica un campo de energía apropiado. Las partículas alineadas tienen la capacidad de fluir o aumentar la resistencia a ceder; esto es, se incrementa la pérdida de viscosidad alcanzada a través del movimiento del amortiguador. Los dos tipos principales de campos de energía usados son los eléctricos y magnéticos, por los cuales los nombres son derivados: Amortiguadores Electro-Reológicos. (ER) y Magneto-Reológicos. (MR).. La mayor ventaja usando los fluidos reológicos en los amortiguadores, es de que no es necesario controlar válvulas externas como en el caso de las suspensiones activas, debido a que la arquitectura de la válvula siempre se encuentra en operación, aplicando diferentes campos magnéticos se alcanzan diferentes amortiguamientos. Para los amortiguadores ER este es un tipo de inconveniente. Su operación requiere de varios K V / m m de campo.
(15) 4 eléctrico, mientras que se alcanzan bajos esfuerzos cortantes. Por otro lado, los amortiguadores MR, pueden generar altos esfuerzos cortantes mientras son operados normalmente con una batería del vehículo. Esto hace a los fluidos magneto-reológicos adecuados para su uso en vehículos, y como amortiguamiento en estructuras sujetas a sismos. Las características típicas del (luido para sus usos incluyen baja viscosidad a un campo magnético cero, alta viscosidad a un campo magnético máximo, baja histéresis, inercia química, estabilidad de temperatura, y respuesta rápida en el cambio del proceso [20]. Los amortiguadores magneto-reológicos. han recibido gran atención en las últimas dos décadas, debido a que es. una tecnología potencial para conducir al control semi-activo. Es de gran importancia entender el comportamiento dinámico de tales dispositivos, cuyo histéresis no lineal es un fenómeno complejo [20]. L a Figura 1.2 muestra una vista de un amortiguador magneto-reológico monotubo. A través de la bobina interna del amortiguador, circula la corriente eléctrica (normalmente de 1-2 A ) que produce el cambio en el campo magnético.. Figura 1.2: Vista interna de un amortiguador magneto-reológico [5].. 1.2.. Descripción del problema. Como dispositivos de control semi-activo, los amortiguadores MR han recibido una gran atención. Detrás de las aplicaciones de estos dispositivos, surgen inconvenientes como la no linealidad de la fuerza/desplazamiento y la histéresis en la relación fuerza/velocidad. E l control efectivo de un amortiguador MR, depende en entender su comportamiento no lineal e histérico, bajo la aplicación de un campo magnético. Por consiguiente, el desarrollo de algoritmos de control precisos, que pueden tomar las ventajas máximas de las características únicas de los amortiguadores MR, dependen fuertemente de los modelos matemáticos que permiten caracterizar adecuadamente el comportamiento intrínseco no lineal de estos dispositivos. Es importante conducir una evaluación comparativa de los modelos con los que se cuenta actualmente, de manera que se seleccionen los más adecuados, para desarrollar algoritmos de control que puedan ser usados en el control de la suspensión semi-activa. Sin embargo, una tarea difícil surge, en encontrar modelos simples con una buena precisión. En adición, es necesario explorar e implementar los modelos para amortiguadores MR, en estudios de simulación con controladores de la suspensión del vehículo. E l éxito de los amortiguadores MR en las aplicaciones de vehículos con suspensiones semi-activas, depende fuertemente de dos aspectos: uno es la precisión en la modelación de los amortiguadores MR, para el diseño de los controladores, el otro aspecto se debe a la selección de estrategias de control apropiadas. Los alcances del diseño del control de la suspensión basado en un modelo, permite optimizar los controladores de acuerdo al desempeño del criterio seleccionado..
(16) Introducción. 1.3.. 5. Propuesta de Tesis. Varios investigadores se han enfocado en obtener modelos para probar el comportamiento de los amortiguadores MR. Sin embargo, pocos han conjuntado una comparación de modelos dependientes de corriente, que pueden ser implementados en controladores, para su validación ante diferentes escenarios de prueba. Recientemente, Sahin et al. [43], realizó una evaluación comparativa de modelos paramétricos disponibles, que han sido usados en diferentes trabajos, para desarrollar algoritmos de control, mostrando que los modelos algebraicos simples, exhiben mejores predicciones en comparación con los modelos paramétricos diferenciales. E l modelo algebraico mAlg que propone Sahin en su trabajo, es de los pocos modelos que poseen como variable de entrada la aceleración. L a estimación de la fuerza de este modelo, provee buenos resultados ante los modelos de ecuaciones diferenciales de Lugre, Dahl y Spencer [38]. Por otro lado, Sandu et al. [7], llevo a cabo un estudio para predecir el comportamiento de múltiples entradas, de un amortiguador MR experimental. A manera de comparación, evalúa cuatro aproximaciones de modelación; la lineal, no lineal, con histéresis y la probabilística. Sandu demuestra que el hecho de incluir la histerésis en el modelo no lineal propuesto, reduce la suma cuadrática del error en un 35 % sobre el modelo lineal. Referente a la modelación no paramétrica (modelos de caja negra), Savaresi et al. [34] propone dos comparaciones de modelación. L a primera comparación involucra un modelo no lineal autorregresivo con variable exógena (NARX), contra 2 modelos paramétricos semi-fenomenológicos (Bingham y el modelo modificado de Bouc-Wen mBW). Los resultados muestran que con los modelos mBWy NARX, es posible lograr una buena minimización de la razón del error a la señal (ESR alrededor del 2 %), teniendo como patrones de entrenamiento una señal de desplazamiento con amplitud constante y frecuencia creciente (SFS), acompañada de corrientes eléctricas constantes (0, 0.6 y 1.2 A.). En la segunda comparación, se involucra una dependencia de la corriente eléctrica en la estructura de los modelos N A R X y mBW, con el objetivo de llevar a cabo un análisis del desempeño de los modelos, ante corrientes eléctricas de entrada variables al amortiguador MR. E l modelo N A R X provee buenos resultados de modelación ( E S R ~ 4 %•), mientras que el modelo mBW con dependencia de corriente eléctrica, no obtiene buenos resultados de la estimación de la fuerza de amortiguamiento (ESR~ 22 %). Con el propósito de mostrar una revisión de la modelación parámetrica de los amortiguadores de fluidos magnetorreológicos, Wang et al. [38], hace un resumen importante de los modelos actuales, así como un análisis a detalle de las características de los amortiguadores ante diferentes condiciones de prueba. En adición a la identificación de los modelos BW y mvBW, los resultados obtenidos sobre los modelos paramétricos de ecuaciones diferenciales, muestran que la predicción de los modelos dinámicos de los amortiguadores MR dependen no solamente en la dinámica del modelo, sino también del método de identificación utilizado. L a idea fundamental de este trabajo, parte de la necesidad existente de obtener un modelo simple que se ajuste adecuadamente a los datos experimentales del amortiguador MR, con el objetivo de diseñar un controlador. Por otra lado, surge la pregunta de cuál modelo es el que permite realizar una mejor estimación de la fuerza dinámica del amortiguador, sin agregar complejidad al modelo. En este estudio, se desean obtener diferentes modelos importantes, que capturen con buena precisión, el comportamiento histerético y no lineal de los amortiguadores MR. Para ello, es necesario llevar a cabo, una caracterización importante del amortiguador, usando señales de excitación que son representativas, en la identificación y las aplicaciones actuales de los amortiguadores MR. En el proceso de la identificación de los coeficientes óptimos de los modelos, se proponen utilizar algoritmos de optimización, además de la selección de criterios de desempeño de la estimación de la fuerza de los modelos. Los modelos aprendidos serán simulados junto con los controladores, para su evaluación en un modelo de cuarto de vehículo, teniendo en cuenta como entrada de excitación, diferentes señales.
(17) 6 de prueba de camino. Por último, se propone utilizar el software comercial de simulación de dinámica de vehículos Carsim™,. como plataforma de validación de las pruebas realizadas al vehículo.. L a validación de los modelos se llevará acabo de manera cualitativa y cuantitativa. Para la validación de los resultados cuantitativos se cuenta con 3 índices de desempeño: la razón del error a la señal (ESR), la raíz cuadrada del error cuadrático medio (RMSE) y la raíz cuadrada del error cuadrático medio simulado (RMSSE), Para la validación de los resultados cualitativos de los modelos, se cuentan con los planos característicos del amortiguador: FuerzaVelocidad y Fuerza en el tiempo. L a validación del desempeño de los modelos en los controladores, se llevará a cabo en base a las frecuencias de respuesta (diagramas de pseudo-Bode) de las simulaciones en lazo abierto y lazo cerrado del cuarto de vehículo. En el caso de un análisis cuantitativo se cuenta con el porcentaje de cambio del error de la densidad de energía espectral (PSD). En cuanto a la simulación en CarSim, la comparación de los modelos se lleva a cabo en base a la respuesta de la simulación en el tiempo del vehículo con esquinas independientes. Los gráficos en el tiempo de las variables de interés permiten analizar el comportamiento de la suspensión y valorar los resultados obtenidos.. 1.4.. Estructura de la Tesis. Este documento se encuentra organizado de la siguiente manera: el capítulo 2 presenta una revisión a la literatura de los modelos existentes, así como su descripción y clasificación de cada uno, posteriormente, se muestra la configuración del montaje experimental, en el que se llevaron a cabo las pruebas con las secuencias de entrenamiento del amortiguador. Como resultado de la experimentación, se visualizan los resultados del plano característico de Fuerza-Velocidad del amortiguador ante diferentes corrientes eléctricas de entrada. Para el procedimiento de identificación, se abordan los diferentes métodos de optimización, así mismo, los índices de desempeño que permitirán la validación de los modelos identificados. A l final de este capítulo se describe la configuración de un cuarto de vehículo, con los controladores utilizados para suspensiones semi-activas. En el capítulo 3, se observa la respuesta del amortiguador ante cada incremento de frecuencia y corriente eléctrica. En la simulación de los modelos identificados, las diferentes gráficas de comparación de los planos característicos del amortiguador, muestran un análisis cualitativo del desempeño. Con el objetivo de seleccionar los coeficientes óptimos de cada modelo, se obtienen los resultados cuantitativos de las pruebas de validación cruzada. A l final de este capítulo se muestran las simulaciones de los controladores con los modelos propuestos, ante diferentes señales de prueba de camino. Primero realizando una comparación en lazo abierto con diferentes corrientes eléctricas de entrada al amortiguador, segundo, cerrando el lazo de control con tres estrategias de control propuestas. En el capítulo 4 se introduce a la plataforma de simulación Carsim™.. Se muestra el tipo de vehículo a simular, la configuración de la suspensión, las dimensiones del. vehículo y los valores de los parámetros necesarios para la simulación conjunta con Simulink™.. Con el propósito. de evaluar el comportamiento de la suspensión del vehículo con los modelos, se eligen 3 pruebas en CarSim que permiten monitorear en el tiempo, las condiciones de maniobrabilidad y confort de la suspensión. Por último, en el capítulo 5 se realiza un análisis y discusión de resultados basados en las simulaciones obtenidas en el tiempo, evaluando el desempeño de los modelos en la suspensión del vehículo utilizado..
(18) Capítulo 2. Revisión Bibliográfica En este capítulo, se lleva a cabo un análisis de los modelos publicados a la fecha, que pueden representar con precisión la no linealidad de la fuerza de amortiguamiento. Se realiza una descripción del montaje experimental, llevado a cabo, en la realización de cada una de las diferentes pruebas del diseño de experimentos, así como las especificaciones de las secuencias de entrenamiento, para la excitación de la respuesta de los amortiguadores MR. Como parte de la etapa de identificación, se proporciona una explicación general de los algoritmos de optimización utilizados, además de la metodología de validación de los modelos. Para la simulación del control de la suspensión con esquinas independientes, se hace una revisión de la literatura, de los controladores a utilizarse.. 2.1.. Modelación de M R Dampers. Uno de los factores importantes para lograr un control favorable de un sistema basado en el uso de amortiguadores MR, es poseer un modelo de la fuerza de amortiguamiento, que capture con precisión el fenómeno no lineal del amortiguador MR. En esta sección se presenta una revisión de la literatura, con respecto a modelos existentes que realizan una buena predicción del comportamiento no lineal del amortiguador. Los modelos dinámicos de los amortiguadores, generalmente sufren de la complejidad de modelar el comportamiento físico, o la ineficiencia en estructura del modelado denominado caja negra. Algunos de los modelos paramétricos mostrados en este capítulo poseen una dependencia de la corriente eléctrica. E l control efectivo de un amortiguador MR, depende de la estimación de la fuerza del modelo ante el campo magnético producido por la corriente eléctrica. Más adelante, se analizarán los resultados referentes al proceso de indentificación de los parameteros de los modelos aquí presentados, revelando el desempeño en la caracterización de la fuerza del amortiguador ante diferentes patrones de entrada (frecuencias con amplitudes de desplazamiento y corriente). Actualmente, se han desarrollado diferentes modelos para representar las características de los amortiguadores MR. De acuerdo a las propiedades que representan [38], estos pueden ser categorizados como o dinámicos.. cuasiestáticos. De acuerdo a los métodos de modelación, pueden ser categorizados como paramétricos. y no pa-. ramétricos. De acuerdo a la reversibilidad de los modelos desarrollados, pueden ser categorizados como dinámicos y dinámicos inversos. A continuación se revisarán diferentes arquitecturas de modelos dinámicos paramétricos, las cuales han sido usadas extensamente en la modelación y en el desarrollo de algoritmos de control, que toman ventaja máxima de las características únicas de estos dispositivos.. 7.
(19) 8. 2.1.1.. Modelos paramétricos dinámicos. Los modelos paramétricos dinámicos representan las relaciones de entrada y salida del proceso, por medio de ecuaciones que contienen explícitamente un número de parámetros contenidos en una estructura elemental, que puede ser representada por medio de un diagrama de bloques detallado. La parte dinámica indica la dependencia y/o cambio en el tiempo de las variables del modelo. Las ecuaciones son basadas en consideraciones físicas, que toman en cuenta la formulación de ecuaciones de balance o conservación (masa, momento, energía,...), de este modo se facilita la incorporación de conocimiento a priori y una exanimación a posteriori de los ordenes de magnitud de los parámetros estimados. Los modelos paramétricos bajo consideración en este trabajo, pueden agruparse de acuerdo a dos categorías. La primera categoría involucra la evaluación de una expresión algebraica. L a segunda categoría involucra la solución de un modelo que depende de una o varias ecuaciones diferenciales no lineales ordinarias. 2.1.1.1. 2.1.1.1.1.. Los modelos algebraicos Modelo algebraico modificado (mAlg). Sahin et al. [43], propusieron una versión modificada del modelo algebraico usado por Guo y Hu [15], el cuál trata de modelar la histerésis que presenta el amortiguador a bajas corrientes (0 y 0.2 A.). E l modelo agrega un término inercial al final, debido a que las fuerzas inerciales del fluido tienen a ser más dominantes conforme se incrementa la excitación de la aceleración. E l modelo algebraico modificado se encuentra dado por: (2.1) donde f es la precarga del nitrógeno en el acumulador, encargada de compensar la diferencia de volúmenes entre los t. dos lados del pistón, en el fondo del amortiguador MR, C¡, representa el coeficiente de amortiguamiento viscoso, f. y. representa la fuerza de cedencia o fluencia del fluido MR (deformación plástica en presencia del campo magnético), k el coeficiente de forma, x la velocidad de histéresis, y m representa el parámetro referente a la masa virtual, el 0. cuál deberá determinarse en el proceso de identificación, basándose en los datos experimentales. La definición de todas las variables de este documento se encuentran en el Apéndice A. Para caracterizar con precisión el comportamiento de los amortiguadores MR usando el modelo algebraico modificado dado por la ecuación (2.1), se debe identificar un conjunto de seis parámetros:. 2.1.1.1.2.. Modelo de Kwok (Kwok). Kwok et al. [31 ] propone un modelo que representa la relación de histerésis existente entre la fuerza de amortiguamiento y la velocidad. E l modelo además de ser simple, no posee un gran número de parámetros, en contraste con los modelos que representan la dinámica interna del amortiguador, haciendo uso de una ecuación diferencial no l i neal. Los parámetros pueden relacionarse explicitamente con el fenómeno de histéresis, mientras todavía mantienen interpretaciones físicas para el amortiguamiento viscoso y la rigidez del resorte, la Figura 2.1 ilustra la configuración conceptual. E l modelo se encuentra dado por: (2.2) donde z es la variable de histéresis dada por la función de tangente hiperbólica: (2.3).
(20) Introducción. 9. Figura 2.1: Diagrama físico del modelo de Kwok, donde los efectos de cada coeficiente, afectan de manera importante al lazo de histerésis del diagrama Fuerza-Velocidad [31].. donde ¡3 es el factor de escala de la velocidad del amortiguador que define la pendiente de la histéresis, S es el factor de escala que determina el ancho de la histerésis a través del término S.sgn(x). Los efectos de cada parámetro individual en el ciclo de histerésis se ilustran a la derecha de la Figura 2.1. L a viscocidad ex genera una línea inclinada que representa la relación del límite elástico (al final de las dos líneas de la histéresis) entre la velocidad y la fuerza del amortiguador. Un coeficiente largo de c proporciona la relación de inclinación. L a rigidez k (el elipse horizontal formado del producto kx) es responsable de la apertura encontrada en la proximidad de la velocidad cero. Un valor grande de k corresponde a la apertura de las terminaciones. Los parámetros c y k contribuyen a la representación de un amortiguamiento convencional sin histerésis. L a histerésis total (el lazo histerético más grande mostrado en la Figura 2.1) se escala mediante el factor a, determinando así la altura de histerésis. E l lazo total de histerésis es finalmente desplazado por el offset /o. Kwok expresa que el modelo contiene solamente una función de tangente hiperbólica, haciéndolo computacionalmente eficiente en el contexto de la identificación de parámetros, y su uso en el diseño e implementación de controladores. Para caracterizar con precisión el comportamiento de los amortiguadores MR usando el modelo de Kwok, de las ecuaciones (2.2 y 2.3), se debe identificar un conjunto de seis parámetros:. 2.1.1.1.3.. Modelo modificado de Kwok (mKwok). E l modelo de Kwok no incluye una dependencia de la corriente eléctrica en la estructura original. Esta característica es vital para obtener una representación completa del amortiguador MR. Aunque un modelo pueda replicar la histerésis, si se modifica el nivel de corriente eléctrica, el modelo tiene que adaptar los parámetros para ajustarse al nuevo comportamiento del amortiguador. Si el modelo no incluye una dependencia de la corriente eléctrica, no le será posible replicar el comportamiento del amortiguador MR en una manera adecuada. Se han llevado a cabo diferentes trabajos sobre la dependencia lineal de la corriente eléctrica [1,7, 31,43]. En dichos trabajos, se ha observado que no existe una mejora significativamente grande, cuando se aumenta el orden del polinomio de corriente, que multiplica a algún término dentro de la ecuación de los diferentes modelos.
(21) 10 propuestos [1] . Teniendo en cuenta lo anterior, se decidió incluir el término en la ecuación del modelo de Kwok: (2.4) donde la i representa la corriente eléctrica dentro de la bobina del amortiguador. Las demás variables poseen el mismo significado, descrito en el modelo de Kwok. Con la modificación anterior, se obtiene una gran mejora en la identificación del modelo del amortiguador. 2.1.1.1.4.. Modelo histerético no lineal (Hnl). Para propósitos de control, es deseable usar modelos con pocos parámetros, asegurándose que el modelo a utilizar posea una respuesta consistente, con respecto a las características reológicas relacionadas a la región del límite elástico del amortiguador MR. Sandu et al. [7] incorpora un filtro dinámico a un modelo no lineal para exhibir los efectos de la histéresis. Independientemente del efecto en cada modelo, la histerésis se puede modelar de manera práctica, incluyendo un resorte en serie con un amortiguador ideal. E l modelo dinámico y no lineal puede ser modelado mediante la siguiente ecuación: (2.5) donde ex es un término referente al amortiguamiento lineal viscoso. E l modelo muestra una dependencia de corriente eléctrica mediante un polinomio de expansión simple, al igual que una representación de la curva característica de Fuerza-Velocidad a través de una función exponencial y la función sign. E l término VQ es una constante que determina la transición entre la región de preesfuerzo y postesfuerzo. A l final de la ecuación se considera la función de transferencia para agregar histéresis al modelo, donde a es un parámetro a ser determinado. Para caracterizar el comportamiento de los amortiguadores MR usando el modelo histerético no lineal dado por las ecuación (2.5), se debe identificar un set de 7 parámetros constantes relacionados con la corriente de excitación, el conjunto de parámetros es el siguiente:. 2.1.1.1.5.. Modelo de Guo (Guo). Para interpretar el comportamiento histéretico y bi-viscoso de una forma concisa y suave, Guo et al. [41 ] propone un modelo del amortiguador MR con parámetros que poseen significados físicos. E l modelo propuesto representa la fuerza de amortiguamiento por medio de: (2.6) donde x y i representan el desplazamiento y la velocidad del pistón del amortiguador. A\ es la fuerza dinámica de cedencia o fluencia del fluido M R , Ai y A son parámetros relacionados a los coeficientes de amortiguamiento 3. viscoso en la región de límite de elasticidad, Vo y Xo denotan respectivamente, el valor absoluto de la velocidad crítica histéretica in v el desplazamiento crítico histerético Xn, ñor lo que: (2.7) (2.8).
(22) 11. Introducción donde la +Vó y el — X. 0. se mantienen cuando el pistón se mueve a lo largo de la dirección positiva x del pistón, y. viceversa. L a Figura 2.2 muestra un diagrama esquemático del modelo propuesto. E l carácter histerético de la fuerza de amortiguamiento puede ser descrito por medio de un retardo de fase, el cual a su vez puede ser descrito por una combinación lineal de la velocidad del pistón i y el desplazamiento x.. Figura 2.2: Diagrama esquemático del modelo de Guo, donde k\ = A^VQ/XQ,. k = A2V0/X0, <¿i = A-¿, di = A2 2. [41]. E l modelo posee una respuesta suave con una expresión simple, la cual es una extensión del modelo de Bingham [40], definida por una función del tipo tanh, además del término x + (Vo/X )x 0. en lugar de x. E l segundo término en. el modelo propuesto, A2(x + (Vo/Xo)x), es una combinación lineal de la velocidad del pistón i y el desplazamiento x. L a primer parte de este término es A<¿x, que representa la característica de viscosidad de amortiguamiento lineal de los fluidos Newtonianos. La segunda parte del término es A2(Vo/X )x, 0. corresponde a la característica lineal de. los elastómeros. Para caracterizar el comportamiento de los amortiguadores MR usando el modelo de Guo dado por las ecuaciones (2.6 - 2.8), se debe identificar un conjunto de cinco parámetros constantes: f = 2.1.1.1.6.. [A ,A ,A ,X ,V ]. 1. 2. 3. 0. 0. Modelo modificado de Guo (mGuo). A l igual que el modelo de Kwok, es necesario incluir la dependencia de la corriente eléctrica en el modelo. Se analizaron diferentes combinaciones de corriente [1], para obtener una mejora en la estimación de la fuerza del amortiguador. Por lo que, los coeficientes del modelo se modificaron en una estructura diferente del modelo de Guo: (2.9) donde la i representa la corriente eléctrica dentro de la bobina del amortiguador. La estructura del modelo modificado de Guo, permite la identificación de un conjunto de seis parámetros constantes, sin incrementar la complejidad y el número de parámetros a identificar. Para caracterizar el comportamiento de los amortiguadores MR usando el modelo modificado de Guo dado por la ecuación (2.9), se debe identificar un conjunto de seis parámetros constantes: / =. [ai,a ,a ,a ,X ,V }. 2. 3. 4. z. z.
(23) 12 2.1.1.2.. Modelos paramétricos basados en ecuaciones diferenciales. 2.1.1.2.1.. Modelo general de Bouc-Wen (BW). E l modelo de Bouc-Wen et al. [4] es un modelo dinámico, extremadamente versátil, que ha sido usado extensivamente por diferentes investigadores para simular el fenómeno no lineal de la histéresis presentado en el amortiguador MR. L a fuerza de amortiguamiento se encuentra dada por: F(t) = CQX + ko(x — XQ) + az. (2.10). de donde x es el desplazamiento inicial debido al gas en el acumulador, a es la caída de presión debido al efecto 0. M R (esfuerzo cortante), y z es la variable evolutiva gobernada por: (2.11) En la ecuación (2.11), 7, /3, A y n son los parámetros experimentales del modelo de Bouc-Wen, que afectan la forma y escala del lazo de histerésis. En adición, la fuerza /o debido al acumulador puede ser directamente incorporada en el modelo, como una deflexión inicial del resorte linealfeo-L a Figura 2.3a muestra un diagrama esquemático del modelo simple de Bouc-Wen.. (a) Modelo general.. (b) Modelo modificado.. Figura 2.3: Los modelos de Bouc-Wen [4]. E l modelo simple de Bouc-Wen es recomendado para la simulación numérica, debido a que las ecuaciones dinámicas resultantes son menos complicadas de simular que las del modelo extendido de Bingham. Pero no puede reproducir el efecto del roll-off en la región de cedencia o fluencia del fluido MR, para velocidades con un valor absoluto pequeño. Para caracterizar con precisión el comportamiento de los amortiguadores MR usando el modelo simple de BoucWen dado por las ecuaciones (2.10 y 2.11), se debe identificar un conjunto de ocho parámetros constantes: / = [co,k ,x ,a,j,n, 0. 2.1.1.2.2.. 0. A}.. Modelo modificado de Bouc-Wen (mBW). Debido a que la respuesta no lineal de la fuerza-velocidad del modelo de Bouc-Wen no se atenúa en la región.
(24) Introducción. 13. donde la velocidad y la aceleración poseen signos opuestos y las magnitudes de las velocidades son pequeñas, Spencer et al. [4], propuso una versión modificada del modelo de Bouc-Wen para predicir el comportamiento dinámico del amortiguador MR en dicha región. E l modelo modificado de Bouc-Wen se expresa del siguiente modo: F(t) = az + c {± -y). + k (x - y) + k {x - x ). 0. 0. x. 0. (2.12). donde la variable evolutiva z está gobernada por: i = - 7 |¿ -y\z. 1. n. M™- - (í{x - y) \z\ + A(x - y). (2.13). donde y es el desplazamiento interno del amortiguador M R gobernado por: (2.14) En este modelo modificado, k\ representa la rigidez del acumulador, c\ y co representan el amortiguamiento viscoso observado a bajas y altas velocidades, respectivamente, fco se usa para controlar la rigidez a grandes velocidades y xo es el desplazamiento inicial del resorte kj asociado con la fuerza nominal de amortiguamiento debido al acumulador. El diagrama esquemático del modelo físico se muestra en la Figura 2.3b. Para caracterizar el comportamiento con precisión de los amortiguadores M R usando el modelo de Bouc-Wen modificado dado por las ecuaciones (2.12-2.14), se debe identificar un conjunto de 10 parámetros: / = 2.1.1.2.3.. [c ,c ,k ,k ,x ,a,')\ 3,n,A} 0. 1. 0. 1. 0. f. Modelo modificado de Bouc-Wen dependiente de voltaje (mvBW). Spencer et al. [4], propuso una versión generalizada del modelo mostrado en la Figura 2.3b para corrientes de excitación fluctuantes y, por consiguiente, campos magnéticos. De sus observaciones experimentales, concluyeron que q, Ci y CQ varían linealmente con la aplicación del voltaje de entrada, por lo que propusieron las relaciones: a(u). =. a. Ci(u). =. Cia+CibU. c (u). =. C. 0. + ctbU. a. 0a. (2.15). + Co U b. donde las dinámicas involucradas en el fluido MR alcanzando el equilibrio reológico, son tomadas en cuenta por el filtro de primer orden: ú = —r¡(u — v). (2.16). donde v es el voltaje aplicado al controlador de corriente. Los valores óptimos de un total de 14 parámetros tienen que ser estimados con el ajuste de los datos experimentales y las predicciones del modelo para el amortiguador MR, el conjunto de parámetros constantes: / =. lc ,co ,ko,ci ,ci ,ki,xo,a ,a ,'Y,n,P,ri,A]. 0a. b. a. b. a. b. De acuerdo a este contexto, los parámetros estimados pueden caracterizar el comportamiento del amortiguador MR bajo condiciones expecíficas de corrientes de excitación, frecuencia y amplitud de desplazamiento..
(25) 14. 2.1.2.. Modelos no paramétricos dinámicos. Los modelos no paramétricos dinámicos son capaces de modelar el comportamiento del amortiguador MR con gran precisión, de manera que no es necesario poseer un conocimiento del fenómeno físico que ocurre en el sistema. Encuentran una relación entre una cierta entrada y la respuesta correspondiente, mediante el análisis de datos de prueba o principios de trabajo del dispositivo. Debido a que no exhiben una estructura de manera específica, pueden ser de dimensión infinita, llamados modelos de caja negra [34]. A manera de ejemplos, en la modelación de los amortiguadores MR, se han propuesto y verificado modelos polinomiales N A R X [34], polinomiales de Chebyshev [19], redes neuronales [21], modelos neuro-difusos [8], entre otros. 2.1.2.1.. Modelo Neuronal (ANN). Una neurona artificial, es un modelo matemático de una neurona biológica en su forma más simple, en la cual ocurre un procesamiento de la información, que es enviado a través de enlaces con pesos apropiados para multiplicar la señal transmitida, entre las neuronas. L a red neuronal es una colección de neuronas artificiales, con gran utilidad para establecer relaciones entre las entradas y salidas de cualquier sistema. Generalmente, es difícil desarrollar un modelo matemático para un complejo sistema dinámico y no lineal, tal como el amortiguador MR. Recientemente la red neuronal artificial {Artificial Neuronal Network ANN), ha sido aplicada efectivamente para modelar este tipo de dispositivos [11,21,37], debido a su gran aprendizaje (proceso de entrenamiento) y la creación de funciones (emulación de patrones o clasificación). Es posible modelar el amortiguador MR e identificar el desempeño del sistema complejo dinámico, utilizando una red neuronal. Para este trabajo se propone el uso de un modelo no paramétrico basado en una red neuronal. 2.1.2.1.1.. LaredMLP. L a red del perceptrón multicapas (multi-layer perceptrón MLP), consiste de múltiples capas de neuronas, interconectadas de manera que el flujo de información de las señales, se produzca hacia adelante. Comúnmente, es utilizada en la familia de las redes neuronales, debido a su habilidad para modelar las relaciones funcionales de sistemas complejos. En la Figura 2.4, se muestra una red neuronal MLP de dos capas hacia adelante, con p entradas, m salidas, q neuronas escondidas, y un sesgo en la capa de entrada y salida. Las funciones de activación / en las diferentes neuronas, pueden ser diferentes. Las neuronas de una capa poseen conexiones de peso con neuronas en la siguiente capa, pero no conexiones entre las neuronas de la misma capa o con capas anteriores. L a salida y¿ puede ser expresada como la función de los pesos y las entradas:. (2.17) donde los pesos WÍJ y Wjk (i = 1,2,...,m; j = 1,2,... ,q) son los parámetros ajustables de la red, y son determinados desde el set de datos a través del proceso de entrenamiento. La función de tangente hiperbólica es seleccionada como la función de acción sigmoidal / en la capa escondida. El algoritmo de retro-propagación es uno de los métodos de entrenamiento más utilizados, debido a que permite resolver problemas complejos. En una red neuronal con retro-propagación, el algoritmo de aprendizaje posee dos fases. L a primera, un patrón de entrenamiento de entrada es presentado a la capa de entrada de la red. La red propaga el patrón de entrada de capa en capa, hasta que el patrón de salida es generado por la capa de salida. Si el patrón es.
(26) Introducción. 15. Figura 2.4: Una red conectada de dos capas con propagación hacia adelante [37].. diferente a la salida deseada, un error es calculado y propagado hacia atrás, a través de la red, desde la capa de salida a la capa de entrada. Los pesos son modificados, al igual que el error es propagado. E l entrenamiento del algoritmo de retro-propagación es un gradiente iterativo, diseñado para minimizar el cuadrado del error entre la salida actual del perceptrón multi-capas con propagación hacia adelante, y la salida deseada. Requiere de una función no lineal diferenciable y continua (uso de la función no-lineal sigmoidal).. 2.1.3. Resumen L a Tabla 3.1 presenta un resumen de modelos actuales utilizados en el control de amortiguadores semi-activos. Originalmente, los modelos de Cesmeci (mAlg), Sandu (Hnl) y Spencer (mvBW) presentan la ventaja de que dependen de la corriente eléctrica. En la literatura existe una mayor variedad de modelos [20], sin embargo, muchos de estos no dependen de la excitación de la corriente dentro de su estructura. En este trabajo se escogieron los modelos relevantes, que poseen las variables de entrada reales que afectan la estimación de la fuerza de amortiguamiento. Se han llevado a cabo numerosos esfuerzos para la obtención de modelos cuasiestáticos, que usen como base el modelo de Bingham para fluidos M R [20]. Los modelos de Guo (mGuo) y Kwok (mKwok), poseen la ventaja de pocos parámetros con significados físicos, los cuales se basan en el análisis de la viscosidad y los esfuerzos cortantes de los fluidos MR, como efecto de la presencia del campo magnético. E l modelo de Cesmeci (mAlg) posee la ventaja de pocos parámetros, e incluye la variable de aceleración como efecto de las fuerzas inerciales del fluido a bajas corrientes eléctricas, lo que lo hace un modelo innovador que busca alternativas para la modelación de la fuerza. L a ventaja de los modelos algebraicos se debe a que no poseen una complejidad númerica como la que represen¬ tan los modelos basados en ecuaciones diferenciales. Por otro lado, los modelos basados en ecuaciones diferenciales, tienen una ventaja de estimación de la fuerza [4], debido a que guardan el cambio en las variables de entrada de co¬ rriente eléctrica, desplazamiento y velocidad. E l modelo de Spencer dependiente de voltaje (mvBW), es un modelo de referencia muy útil para comparación del desempeño de modelos de amortiguadores, pero la gran cantidad de parámetros le aumenta cierta complejidad en su identificación e implementación. L a desventaja de los modelos paramétricos ante los modelos no paramétricos, es la precisión del modelo. L a ventaja de contar con una gran cantidad de datos experimentales en este trabajo, brinda la oportunidad de realizar un buen entrenamiento supervisado de la red, así como una validación del modelo (ANN) obtenido, para todas las pruebas realizadas. U n estudio de la literatura indica que este tipo de modelos pueden representar efectivamente el.
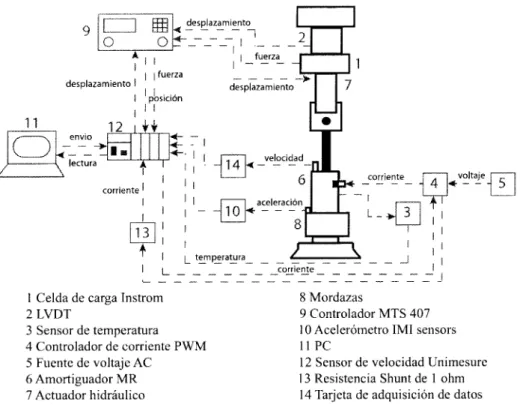
(27) 16 comportamiento del amortiguador MR. El modelo BW se excluye de este trabajo, debido a que no posee una dependencia de la corriente, además de falta de estimación de la fuerza del amortiguador. Los modelos mAlg, mKwok, mGuo se modificaron para incluir el término de la corriente. E l modelo ANN se definirá de los datos experimentales del amortiguador. Los modelos paramétricos que no se basan en ecuaciones diferenciales, resultan sencillos de obtener, debido a que tienen pocos parámetros y poseen una extrapolación de la corriente de manipulación a valores mayores de los identificados experimentalmente. Tabla 2.1: Resumen de los modelos estudiados. Cada modelo posee un determinado número de parámetros, el modelo neuronal se define en base al número de neuronas utilizadas. L a categoría relaciona las propiedades en dos maneras: dinámicas o cuasiestáticas. A l final de la tabla se muestran las variables de entrada de las cuales depende cada modelo. Número de. Tipo de. parámetros. modelo. 6. algebraico. cuasiestático. mKwok. 6. algebraico. cuasiestático. Hnl. 7. algebraico. dinámico. mGuo. 5. algebraico. cuasiestático. Modelo mAlg. 2.2.. Categoría. Variables de entrada independientes i,x,x. i, X. i,x,x. BW. 5. diferencial. dinámico. x,x. mBW. 10. diferencial. dinámico. X, X. mvBW. 14. diferencial. dinámico. i, X, X. ANN. 13. caja negra. dinámico. i, X. Diseño de Experimentos. Para incorporar un amortiguador MR como parte del sistema de control de la suspensión de un vehículo, es necesario, primero analizar sus propiedades características mediante un diseño de experimentos adecuado, que nos permita obtener el comportamiento del amortiguador ante diferentes señales de entrada. Los experimentos llevados a cabo en este estudio, fueron diseñados para obtener una serie de respuestas de la fuerza de amortiguamiento, que contienen los efectos que el amortiguador MR puede exhibir en aplicaciones automotrices. El ajuste de los parámetros de los modelos propuestos, dependen de los experimentos que se desarrollen para obtener los datos, por lo que es necesario tomar en cuenta la localización y el tipo de sensores y actuadores que aseguren una confiabilidad de los datos, tiempos de muestreo, procesamiento de los datos, y que el diseño de experimentos genere información adecuada para identificar los parámetros.. 2.2.1.. Configuración de la prueba experimental. El propósito de la plataforma experimental es determinar las propiedades del amortiguador y obtener la respuesta dinámica necesaria para estimar los parámetros del modelo. L a Figura 2.5 muestra un diagrama del montaje experimental realizado para cada una de las pruebas. Para la realización de las pruebas, el montaje experimental se llevo a cabo utilizando un amortiguador semiactivo de la marca ACDelco™.. L a realización de las pruebas consisten de un actuador electrohidráulico conectado a un.
(28) 17. Introducción. 1 Celda de carga Instrom. 8 Mordazas. 2 LVDT. 9 Controlador M T S 407. 3 Sensor de temperatura. 10 A c e l e r ó m e t r o IMI sensors. 4 Controlador de corriente P W M. 11 PC. 5 Fuente de voltaje A C. 12 Sensor de velocidad Unimesure. 6 Amortiguador M R. 13 Resistencia Shunt de 1 ohm. 7 Actuador hidráulico. 14 Tarjeta de adquisición de datos. Figura 2.5: Diagrama esquemático del amortiguador MR, donde se muestran la interacción entre los diferentes componentes del sistema experimental.. controlador maestro MTS™,. el cual tiene un control de ganancia automática que permite cambiar el tiempo de. simulación, el control de la amplitud y frecuencia de la variable dinámica de desplazamiento mediante un LVDT (Linear Variable Differential Transformer). El amortiguador se fijó a una estructura que contiene una junta en la parte superior, que evita cierto grado de rigidez lateral, al mismo tiempo que permite al actuador proveer la elongación y compresión del amortiguador. L a fuerza resultante es medida por la celda de carga con capacidad de ± 2 5 K N . E l actuador posee un rango de fuerza de ázl5KN. con una carrera del pistón de 6 pulgadas. Se eligió una respuesta a la frecuencia de máximo 20 Hz,. debido a que es la frecuencia de interés en la aplicación de control de vehículos automotrices [25]. En el amortiguador MR, tanto la viscosidad como las propiedades del fluido MR, son controladas por el campo magnético aplicado, el cual es función de la corriente eléctrica de excitación. Para alimentar las señales diseñadas de corriente eléctrica, a la bobina que propicia el campo electromagnético del amortiguador, se utilizó un controlador de corriente eléctrica Pulse Width Modulation PWM con un rango de 0 a 2.5 A . La señal de salida es medida por un sensor de corriente y enviada al sistema de adquisición de datos de las señales de Nationallnstruments™. (NI).. Se utilizó un acelerómetro para medir la aceleración, al igual que un sensor de temperatura para medir esta variable durante la experimentación. Las señales de posición,velocidad, aceleración, corriente, temperatura y fuerza asociadas con el amortiguador, fueron registradas a través del sistema de adquisición de datos, el cuál se monitorea a través de una interfaz desarrollada en LabView™.. L a frecuencia de muestreo de cada una de estas señales fue de 1650 Hz..
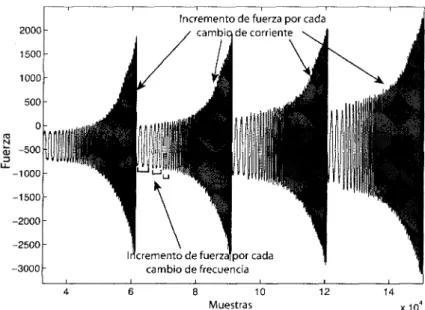
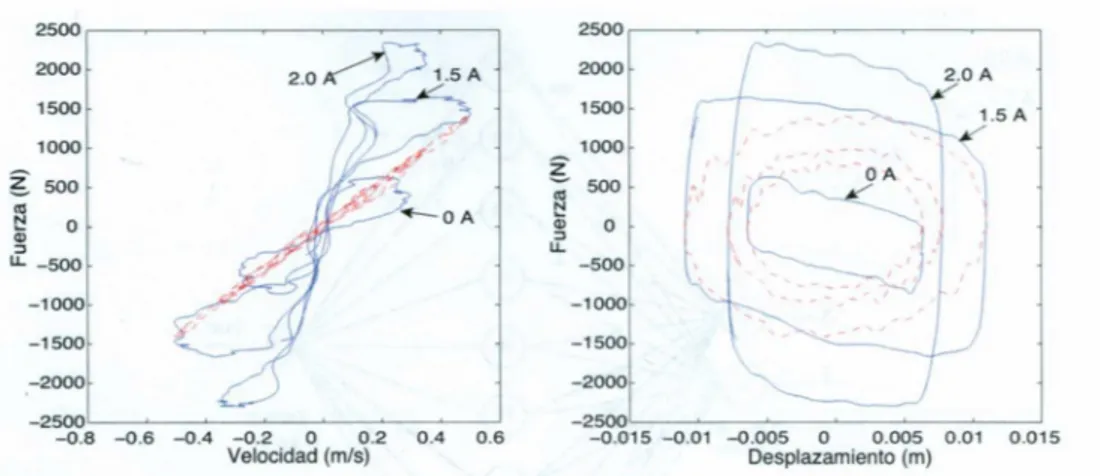
(29) 18. 2.2.2.. Caracterización experimental para las pruebas del amortiguador MR. En la mayoría de las aplicaciones de análisis de sistemas, es importante generar datos que sean lo suficientemente informativos, es decir, que las señales de entrada usadas en cada uno de los experimentos de identificación, tengan una influencia significativa que resulte en una buena estimación de los parámetros del modelo. En la práctica es recomendable decidir sobre una banda importante e interesante de frecuencias para identificar el sistema en cuestión, así como determinar los puntos de operación, los modos y las partes que son excitadas durante cada experimento. El objetivo de la experimentación es extraer la respuesta dinámica del amortiguador MR, mediante la obtención de datos del amortiguador bajo condiciones de trabajo que representen un contenido adecuado de frecuencias. Para realizar esto, se diseñaron conjuntos de experimentos con diferentes patrones de entrada de desplazamiento y corriente eléctrica. Comúnmente, la caracterización de amortiguadores MR se lleva a cabo utilizando señales de excitación de corrientes de entrada constantes con una señal de perfil senoidal [4,15,41]. Sin embargo, es importante tomar en cuenta otro tipo de señales de entrenamiento que reproduzcan la histéresis y no limiten los efectos dinámicos del amortiguador. Esta sección describe las pruebas realizadas al amortiguador para recolectar los datos necesarios que permitan ajustar los modelos del amortiguador descritos. 2.2.2.1.. Secuencias de entrenamiento utilizadas en el Diseño Experimental. La Tabla 2.2 muestra el diseño de experimentos correspondiente al amortiguador MR. Se hicieron uso de 8 pruebas diferentes en la experimentación, con un total de 10 réplicas de cada una. E l propósito del número de réplicas es para garantizar la confiabilidad y consistencia de los resultados. Las características de las secuencias de desplazamiento y corriente eléctrica, así como el interés en la identificación del amortiguador MR, se pueden ver en el Apéndice B. La duración de cada prueba depende del diseño de cada secuencia de entrenamiento, siendo la prueba 5 la que mayor tiempo toma en realizarse, esto es, con el propósito de explorar un rango amplio de frecuencias de interés, en el control semiactivo de la suspensión de un vehículo [15]. Los incrementos de frecuencias van de 0.5, 1.5 o 7.5 Hz, en el caso de las pruebas 1, 2, 5 y 8. En el caso de las pruebas que utilizan una señal de excitación del tipo Road Profile RP, el rango de frecuencias oscila entre 0 y 5 Hz, debido a que es el rango común de la evaluación del comfort a bajas frecuencias [15]. La corriente eléctrica máxima enviada a la bobina del amortiguador, corresponde a 2.5 A en la mayoría de las pruebas. L a evaluación de los rangos de corriente eléctrica utilizados en la experimentación, cumplen el propósito de evaluar el amortiguador sobre características comunes de operación, además del análisis de los cambios de los planos característicos del amortiguador ante cada incremento de corriente eléctrica, como es el caso de la prueba 2, donde los incrementos de corriente se realizan cada 0.25 A . A l final de la derecha de la Tabla 2.2, se muestra el rango de valores de desplazamiento x, velocidad x y aceleración x del pistón del amortiguador, obtenidos con la ayuda de los sensores montados en la plataforma experimental. La carrera dinámica máxima corresponde a la prueba 6, sin embargo las velocidades máximas se alcanzan en las pruebas 1, 2, 3, 4 y 8, donde el rango de frecuencias cambia muy rápido, hasta alcanzar un máximo de 15 Hz.. 2.2.3. Resultados 2.2.3.1.. Planos característicos. A través del análisis de la respuesta del amortiguador, se pueden determinar las diferentes características de operación. En la gráfica de la Figura 2.6 se muestra el plano característico de Fuerza vs Velocidad, del amortiguador.
(30) Introducción. 19. Tabla 2.2: Resumen de las pruebas llevadas a cabo en la experimentación del amortiguador MR. Las secuencias de entrenamiento utilizadas, consisten de 10 réplicas cada una. E l rango de frecuencias de las secuencias de desplazamiento, oscila entre los 0 y 20 Hz, para las secuencias de corriente eléctrica, se encuentre entre los 0 y 2.5 A . El rango del desplazamiento, velocidad y aceleración de la carrera del pistón, se muestra al final de la tabla. Los acrónimos se describen en el Apéndice A. Prueba. Réplicas. Valor máximo pico a pico. Secuencia de. Secuencia de. Duración. Frecuencias. Corrientes. Desplazamiento. Corriente. (segs). (Hz). (A). x (mm). x (m/s). x(m/s ) 613.87. 2. 1. 10. TPNVS. SC. 23. 0.5:0.5:15. 0.5,2. 35. 2.70. 2. 10. SFS. SC. 181. 0.5:0.5:15. 0:0.25:2.25. 25. 2.65. 392.94. 3. 10. FM. ICPS. 30. 1-15. 0-2.5. 25.4. 2.75. 421.27. 4. 10. FM. APRBS. 30. 1-15. 0-2.5. 25.4. 2.69. 395.45. 5. 10. SFS-DA. APRBS. 202. 1:1.5:20. 0-2.5. 25. 1.47. 280.42. 6. 10. RP. ICPS. 30. 0-5. 0-2.5. 50.8. 1.69. 142.92. 7. 10. RP. Cte. 100. 0-5. 0:0.25:2.25. 15. 0.33. 46.11. 8. 10. AM-DA. ICPS. 121. 1:7.5:15. 0-2.5. 25. 2. 458.34. utilizado en la experimentación. La frecuencia de oscilación a la que corresponde la gráfica, se ubica entre los 0 y 2.5 Hz a un desplazamiento pico de 25 mm. E l valor de la fuerza depende fuertemente de la corriente eléctrica de entrada a la bobina del amortiguador. Evaluando a una corriente eléctrica de 0 A., se puede observar que la fuerza de amortiguamiento se mantiene constante las diferentes velocidades del pistón. Por otro lado, conforme aumenta la corriente eléctrica, la histerésis no lineal comienza a formar parte en el comportamiento de la fuerza. Como resultado de la experimentación, en el Apéndice C se pueden observar la variedad de gráficas obtenidas, de los distintos planos característicos del amortiguador. Conforme aumenta la frecuencia del desplazamiento del amortiguador, se observan los efectos no lineales. A partir de frecuencias de 6 Hz, la histéresis se vuelve predominante en el comportamiento de la fuerza del amortiguador.. Figura 2.6: Plano de Fuerza vs. Velocidad a diferentes corrientes eléctricas del amortiguador M R . La fuerza en el amortiguador es simétrica para velocidades positivas y negativas..
(31) 20. 2.3.. Identificación del amortiguador. 2.3.1.. Métodos de optimización para la identificación no lineal. L a propuesta en el problema de mínimos cuadradados no lineales, es calcular los parámetros que determinan a un modelo a partir de datos reales. Pensemos que deseamos calcular los parámetros de un modelo no lineal, es decir, nuestro interés principal es ajustar unos datos a un modelo de la mejor manera posible. Se considera un set de n datos (x\, f ), exp¡. fex. x. P. = f re( ,P), P. (X2, fexp ), • • • ,(x , 2. n. fex ), Pn. y una curva (función de modelo). que en adición a la variable x también depende de ra parámetros, ¡3 = (fíi,/3 ,...,/3 ) 2. m. con. n > m. Se desea encontrar un vector de ñ parámetros tal que la curva se ajuste de la mejor manera a los datos, esto es la suma de cuadrados: (2.18) es minimizada, cuando los residuales (errores) e¿ son dados por: fexpi. fprei. íexp. x. fpTe{%i>. ft). (2.19). para i = 1, 2 , . . . , n. Se considera que los métodos de región de confianza son derivados del método de LevenbergMarquardt, usado para resolver problemas de mínimos cuadrados. Forman una respetada clase de algoritmos para solucionar problemas de minimización sin restricciones, por lo que su popularidad viene de la naturaleza de su alcance, altas propiedades de convergencia y el desarrollo de software tanto eficiente como confiable. Estos métodos surgieron para evitar las dificultades que el método de Gauss-Newton experimenta, cuando a lo largo del proceso iterativo, en algún punto, la matriz Jacobiana no tiene rango completo [17]. E l método reflexivo de región de confianza (trust-region-reflective) requiere de un gradiente, permitiendo solo límites o restricciones de igualdad lineales, pero no ambas. Con estas limitaciones, el algoritmo maneja eficientemente, problemas de gran dispersión y pequeña densidad. Para entender la aproximación de la región de confianza para optimización, es necesario considerar un problema de minimización sin restricción, suponiendo que se tiene un punto x en un espacio n y se requiere mejorar, es decir, mover a un punto con un valor menor en la función. La idea básica es aproximar / con una función simple q, que razonablemente refleje el comportamiento de la función / en una vecindad N, alrededor del punto x. Esta vecindad es la región de confianza. Si un modelo adecuado de la función objetivo se encuentra dentro de la región de confianza, la región es expandida; de manera inversa, si la aproximación no es buena, la región es contraída. Para más detalle de estos algoritmos pueden revisarse el trabajo d e L i [45]. Para estimar los parámetros de los modelos algebraicos, es posible utilizar en Matlab el Toolbox: Curve Fiting, o las funciones fmincon, y Isqcurvefit. Sin embargo para los modelos evolutivos, que poseen dentro de sus estructura, ecuaciones diferenciales no lineales que cambian con el tiempo, es necesario utilizar en Matlab el Toolbox de Simulink: Parameter Estimation (PET). Ambos toolboxes utilizan métodos de mínimos cuadrados no lineales, basados en algoritmos de optimización de gran escala. Para este trabajo se utilizaron los algoritmos de trust-region-reflective y Levenberg-Marquardt, para igualar las predicciones del modelo con los resultados experimentales.. 2.3.2.. Validación de los modelos. Debido a la simplicidad de las suposiciones y el conocimiento impreciso de los parámetros del proceso, una necesidad frecuente es validar un modelo, que se deriva de los experimentos. Es necesario llevar a cabo, un análisis.
Figure
![Figura 2.1: Diagrama físico del modelo de Kwok, donde los efectos de cada coeficiente, afectan de manera impor- impor-tante al lazo de histerésis del diagrama Fuerza-Velocidad [31]](https://thumb-us.123doks.com/thumbv2/123dok_es/2351593.518265/20.918.237.786.134.353/figura-diagrama-físico-efectos-coeficiente-histerésis-diagrama-velocidad.webp)

+7





Documento similar
Un método de estudio aparte de ser una herramienta muy útil al momento de estudiar también nos ayuda a agilizar nuestra mente y tener una buena memoria para futuro?. Palabras
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
En cada antecedente debe considerarse como mínimo: Autor, Nombre de la Investigación, año de la investigación, objetivo, metodología de la investigación,
El quincenario de los frailes de Filipinas, condena para el Archipiélago los propósitos de nivelación jurídica que para todo territorio español, peninsular o ultramarino, se
Aunque en relación con su volumen de capital al mo- mento de su fundación (1 O millones de pesos) ocupara el segundo lugar entre las empresas manufactureras (el pri-
Es importante mencionar, que en los últimos 5 años, China ha venido mostrando un gran avance en la industria textil y de la confección, ingresando en mercados como Europa,
*Correctivo contingente *Correctivo programable.. El mantenimiento correctivo contingente se refiere a las actividades que se realizan en forma inmediata, debido a que algún
