Análisis del comportamiento del flujo transitorio en un sistema de inyección de un Motor Diésel
76
0
0
Texto completo
(2) Agradezco a mis padres porque me brindaron su apoyo tanto moral como económico para estudiar y lograr el objetivo trazado de ser un profesional, a la universidad nacional de San Agustín de Arequipa alma mater de la ciencia porque me ha formado para el futuro como un Ingeniero Mecánico de alto nivel competitivo y a mis queridos abuelos por ser los primeros formadores y educadores de mi vida.. Muchas gracias.
(3) Contenido INTRODUCCIÓN ......................................................................................................................... - 1 1.. 2.. Generalidades ................................................................................................................... - 2 1.1.. Antecedentes ............................................................................................................ - 2 -. 1.2.. Objetivos de la investigación..................................................................................... - 2 -. 1.2.1.. Objetivo general ................................................................................................ - 2 -. 1.2.2.. Objetivos específicos ......................................................................................... - 2 -. 1.3.. Hipótesis .................................................................................................................... - 3 -. 1.4.. Justificación, importancia y limitaciones de la investigación .................................... - 3 -. 1.4.1.. Justificación de la investigación ........................................................................ - 3 -. 1.4.2.. Importancia de la investigación ........................................................................ - 4 -. 1.4.3.. Limitaciones de la investigación ........................................................................ - 4 -. Marco teórico .................................................................................................................... - 5 2.1.. Sistema de ecuaciones mecánicas ............................................................................ - 5 -. 2.1.1.. Hipótesis del medio continuo ........................................................................... - 5 -. 2.1.2.. Concepto de partícula fluida ............................................................................. - 5 -. 2.1.3.. Aproximaciones clásicas al estudio de los fluidos ............................................. - 6 -. 2.1.4.. Ecuaciones generales de la mecánica de fluidos .............................................. - 6 -. 2.2.. Principio de conservación de la cantidad de movimiento ........................................ - 7 -. 2.2.1. 2.3.. Ecuación de la continuidad ..................................................................................... - 12 -. 2.3.1. 2.4.. Ecuación de Euler ............................................................................................ - 11 -. Ecuación de continuidad en un punto ............................................................ - 13 -. Sistemas de suministro de combustible.................................................................. - 15 -. 2.4.1.. Sistema de alimentacion diesel convencional. ............................................... - 15 -. 2.4.2. 19 -. Sistema de alimentacion diesel de inyeccion por acumulación (Common Rail). ... -. 2.4.3.. Sistema de alimentación diésel con inyector bomba. .................................... - 21 -. 2.4.4.. Selección del sistema a investigar: .................................................................. - 22 -. 2.5.. Soluciones numéricas de ecuaciones diferenciales ordinarias ............................... - 23 -. 2.5.1.. El método de pendiente constante o el método de Euler .............................. - 23 -. 2.5.2.. El método de Heun o método de pendiente promedio .................................. - 26 -. 2.5.3.. Método de Runge-Kutta .................................................................................. - 28 -. 3. Modelo matemático del comportamiento de un flujo transitorio en el sistema de inyección Diésel ....................................................................................................................... - 30 3.1.. Condiciones del problema....................................................................................... - 30 -. 3.2.. Modelo matemático del problema ......................................................................... - 32 -.
(4) 3.2.1. 3.3.. 4.. Ecuación del movimiento del combustible en la tubería ................................ - 32 -. Condiciones de frontera .......................................................................................... - 35 -. 3.3.1.. Cavidad sobre el embolo buzo de la bomba de combustible ......................... - 36 -. 3.3.2.. Cavidad de la válvula de impulsión de la bomba de combustible .................. - 38 -. 3.3.3.. Cavidad del inyector ........................................................................................ - 39 -. 3.4.. Condiciones iniciales ............................................................................................... - 40 -. 3.5.. Algoritmo de cálculo ............................................................................................... - 41 -. Influencia de los parámetros de diseño sobre los procesos hidrodinámicos ................. - 43 4.1. Comportamiento de los procesos hidrodinámicos en la línea de alta presión del sistema de suministro de combustible del motor .............................................................. - 43 4.2. Influencia de la longitud de la tubería de alta presión sobre los procesos hidrodinámicos........................................................................................................................ 49 4.3. Influencia del diámetro de la tubería de suministro de alta presión sobre los procesos hidrodinámicos........................................................................................................................ 54 4.4. Influencia de la presión en la línea de suministro de baja presión sobre los procesos hidrodinámicos........................................................................................................................ 56 4.5. Influencia de la carrera del embolo buzo en la línea de suministro de alta presión sobre los procesos hidrodinámicos ......................................................................................... 62. 5.. Conclusiones........................................................................................................................ 64. ANEXO 1: Tablas de Identificadores ............................................................................................ 66 Bibliografía .................................................................................................................................. 71.
(5) INTRODUCCIÓN En el diseño de componentes mecánicos el efecto de parámetros como: la velocidad, aceleración, presión, longitud, desplazamiento, sección, etc.; es determinante para alcanzar la máxima eficiencia de piezas, sistemas o máquinas. Por ello es necesario establecer los fenómenos que se dan, la manera en la cual influyen en el funcionamiento y así establecer los parámetros para obtener la mayor eficiencia en las condiciones requeridas. Para el transcurso de un proceso de combustión de calidad en el cilindro y obtención de altos índices técnico, económicos y ecológicos del motor diésel es necesario que el sistema de combustible permita: -. La medición exacta de la cantidad de combustible en el ciclo en correspondencia con el. régimen de trabajo del motor, -. Inyección del combustible en un intervalo de tiempo dado del ciclo de trabajo,. -. Una característica de inyección dada en el tiempo,. -. Calidad exigida de pulverización en todos los regímenes y distribución necesaria de. combustible en el volumen de la cámara de combustión, -. Finalización completa de inyección y ausencia de post inyecciones,. -. Distribución uniforme de combustible a los cilindros en todos los regímenes de trabajo,. -. Estabilidad de los suministros cíclicos de combustible,. -. Característica de velocidad satisfactoria de suministro de combustible.. Para satisfacer las exigencias hacia una característica de inyección en todos los intervalos de régimen de trabajo del motor en el diseño, es necesario considerar los procesos hidrodinámicos en el sistema de suministro de combustible. Específicamente en los conductos de alta presión, en nuestro caso, entre la bomba de alta presión y la cavidad del inyector; donde el movimiento del fluido depende de la densidad, compresibilidad y viscosidad del combustible.. -1-.
(6) 1. Generalidades. 1.1. Antecedentes En la actualidad, para el análisis del movimiento transitorio del combustible en el conducto de alta presión en los sistemas de suministro de combustible existen diferentes tipos de modelos matemáticos; sin embargo, dichos modelos se caracterizan por ser complejos. Es debido a la complejidad de los modelos matemáticos existentes que en el presente trabajo se desarrolla un modelo simplificado que, sin perder fiabilidad, permite el cálculo del movimiento transitorio del fluido en la tubería de suministro de combustible de alta presión; asimismo, se analiza la influencia de la variación de los parámetros de diseño del sistema de inyección y régimen de trabajo de la bomba de inyección en el comportamiento del fluido transitorio a través del conducto del sistema de inyección de combustible de un motor Diésel.. 1.2. Objetivos de la investigación 1.2.1. Objetivo general Desarrollar un modelo matemático simplificado que permita el análisis del comportamiento de un flujo transitorio en el sistema de inyección de un motor diésel.. 1.2.2. Objetivos específicos a. Análisis matemático para la descripción del movimiento transitorio de un fluido ideal; b. Definir, entre los diferentes tipos de sistemas de suministro de combustible de motores Diésel, el adecuado para el análisis; c. Elaborar un modelo matemático del movimiento transitorio del fluido en la tubería de suministro de combustible de alta presión; d. Analizar la influencia de la variación de los parámetros de explotación y de diseño del sistema de inyección en el comportamiento del fluido transitorio a través del conducto del sistema de inyección de combustible de un motor Diésel.. -2-.
(7) 1.3. Hipótesis a. En base a parámetros de diseño como son: presiones, temperaturas, velocidades, etc.; y a través de las ecuaciones de la conservación de la masa, continuidad y su relación en la ecuación de Euler, es posible describir matemáticamente el movimiento transitorio de un fluido ideal, específicamente para el combustible en una tubería de alta presión. b. Entre los diferentes tipos de sistemas de suministro de combustible (Sistema de alimentación diésel convencional, Sistema de alimentación diésel de inyección por acumulación (Common Rail), Sistema de alimentación diésel con inyector bomba, etc.); es posible seleccionar uno, cuyas características funcionales favorezcan el estudio de los fenómenos hidrodinámicos ocurrentes. c. Una vez logrado establecer las relaciones matemáticas basadas en la ecuación de Euler y la continuidad para las cavidades, del sistema de alimentación Diésel, elegidas como volúmenes de control (cavidad sobre el embolo buzo, cavidad sobre la válvula impelente y cavidad sobre el inyector), en conjunto con las condiciones iniciales y de frontera, se obtendrá un modelo matemático que describa el movimiento transitorio del combustible. d. Por medio de un modelo matemático es posible analizar la influencia de la variación de los parámetros de explotación y de diseño del sistema de inyección en el comportamiento del fluido transitorio; con ello, determinar su efecto en la característica de inyección.. 1.4. Justificación, importancia y limitaciones de la investigación. 1.4.1. Justificación de la investigación El tiempo de estudio invertido en los años universitarios despierta la curiosidad de lo que ocurre internamente en los componentes de los grandes sistemas inventados por el hombre; la variación paramétrica y su comportamiento a lo largo del tiempo y/o bajo cambios normalmente despreciables en los cálculos generales. Es aquí donde nacen los llamados modelos matemáticos, sistemas donde todos los comportamientos u opciones se pueden simular por medio de ecuaciones matemáticas cuyas variables están previamente establecidas de acuerdo a lo que se quiere contemplar. Te permiten obtener resultados en base a experiencias anteriores o a estadística. Se utiliza en pronósticos (de demanda, ventas), en control de inventarios, de -3-.
(8) calidad, muestreo). Hay que rescatar que todo modelo matemático sufre de error cuando se compara con la realidad, pues siempre será un cálculo y factores externos que no permitan la exactitud.. 1.4.2. Importancia de la investigación La presente investigación guarda su importancia en el hecho de poder desvelar, de manera sencilla, el comportamiento interno del fluido combustible en la tubería de alta presión. Permitiendo de esta manera analizar las variaciones a las que se podría someter el diseño y analizar los resultados sin necesidad de invertir en múltiples y costosas fabricaciones de pruebas.. 1.4.3. Limitaciones de la investigación Al ser esta una investigación teórica, no se presentarán modelos físicos y/o proyectos cuyo fin sea probarla. En el cálculo de las ecuaciones involucradas, se considerará que: el flujo en la tubería de combustible es isotérmico, las fuerzas de masas externas son menospreciables, el flujo de combustible es unidimensional y el carácter del movimiento del combustible es igual en todos los puntos de la sección dada de la tubería perpendicular a su eje.. -4-.
(9) 2. Marco teórico. 2.1. Sistema de ecuaciones mecánicas Como principal pilar, para el desarrollo del modelo matemático en el presente trabajo, se toma la mecánica de fluidos; a su vez, en esta rama de la ciencia se asume que los fluidos se comportan según las siguientes leyes: - Principio de conservación de la masa - Principio de conservación de la cantidad de movimiento - Primera y segunda ley de la termodinámica. 2.1.1. Hipótesis del medio continuo La hipótesis del medio continuo es la hipótesis fundamental de la mecánica de fluidos y en general de toda la mecánica de medios continuos. En esta hipótesis se considera que el fluido es continuo a lo largo del espacio que ocupa, ignorando por tanto su estructura molecular y las discontinuidades asociadas a esta. Con esta hipótesis se puede considerar que las propiedades del fluido (densidad, temperatura, etc.) son funciones continuas.. La forma de determinar la validez de esta hipótesis consiste en comparar el camino libre medio de las moléculas con la longitud característica del sistema físico. Al cociente entre estas longitudes se le denomina número de Knudsen. Cuando este número adimensional es mucho menor a la unidad, el material en cuestión puede considerarse un fluido (medio continuo). En el caso contrario los efectos debidos a la naturaleza molecular de la materia no pueden ser despreciados y debe utilizarse la mecánica estadística para predecir el comportamiento de la materia. Ejemplos de situaciones donde la hipótesis del medio continuo no es válida pueden encontrarse en el estudio de los plasmas.. 2.1.2. Concepto de partícula fluida Este concepto está muy ligado al del medio continuo y es sumamente importante en la mecánica de fluidos. Se llama partícula fluida a la masa elemental de fluido que en un instante determinado se encuentra en un punto del espacio. Dicha masa elemental ha de ser lo suficientemente grande como para contener un gran número de moléculas, y lo suficientemente pequeña como para poder considerar que en su interior no hay variaciones de las propiedades macroscópicas del fluido, de modo que en cada partícula fluida podamos asignar un valor a estas -5-.
(10) propiedades. Es importante tener en cuenta que la partícula fluida se mueve con la velocidad macroscópica del fluido, de modo que está siempre formada por las mismas moléculas. Así pues, un determinado punto del espacio en distintos instantes de tiempo estará ocupado por distintas partículas fluidas.. 2.1.3. Aproximaciones clásicas al estudio de los fluidos A la hora de describir el movimiento de un fluido existen dos puntos de vista. Una primera forma de hacerlo es seguir a cada partícula fluida en su movimiento, de manera que buscaremos unas funciones que nos den la posición, así como las propiedades de la partícula fluida en cada instante. Ésta es la descripción Lagrangiana. Una segunda forma es asignar a cada punto del espacio y en cada instante, un valor para las propiedades o magnitudes fluidas sin importar que, en ese instante, la partícula fluida ocupa ese volumen diferencial. Ésta es la descripción Euleriana, que no está ligada a las partículas fluidas sino a los puntos del espacio ocupados por el fluido. En esta descripción el valor de una propiedad en un punto y en un instante determinado es el de la partícula fluida que ocupa dicho punto en ese instante.. La descripción euleriana es la usada comúnmente, puesto que en la mayoría de casos y aplicaciones es más útil. Usaremos dicha descripción para la obtención de las ecuaciones generales de la mecánica de fluidos. [4, 5]. 2.1.4. Ecuaciones generales de la mecánica de fluidos Las ecuaciones que rigen toda la mecánica de fluidos se obtienen por la aplicación de los principios de conservación de la mecánica y la termodinámica a un volumen fluido. Para generalizarlas usaremos el teorema del transporte de Reynolds y el teorema de la divergencia (o teorema de Gauss) para obtener las ecuaciones en una forma más útil para la formulación euleriana.. Las tres ecuaciones fundamentales son: la ecuación de continuidad, la ecuación de la cantidad de movimiento, y la ecuación de la conservación de la energía. Estas ecuaciones pueden darse en su formulación integral o en su forma diferencial, dependiendo del problema. A este conjunto de ecuaciones dadas en su forma diferencial también se le denomina ecuaciones de NavierStokes (las ecuaciones de Euler son un caso particular de las ecuaciones de Navier-Stokes para fluidos sin viscosidad). -6-.
(11) No existe una solución general a dicho conjunto de ecuaciones debido a su complejidad, por lo que para cada problema concreto de la mecánica de fluidos se estudian estas ecuaciones buscando simplificaciones que faciliten la resolución del problema. En algunos casos no es posible obtener una solución analítica, por lo que hemos de recurrir a soluciones numéricas generadas por ordenador. A esta rama de la mecánica de fluidos se la denomina mecánica de fluidos computacional. Las ecuaciones son las siguientes: . Ecuación de continuidad:. . Ecuación de cantidad de movimiento:. . Ecuación de la energía. 2.2. Principio de conservación de la cantidad de movimiento La cantidad de movimiento, momento lineal, ímpetu o momentum es una magnitud física fundamental de tipo vectorial que describe el movimiento de un cuerpo en cualquier teoría mecánica. En mecánica clásica, la cantidad de movimiento se define como el producto de la masa del cuerpo y su velocidad en un instante determinado. Históricamente, el concepto se remonta a Galileo Galilei. En su obra Discursos y demostraciones matemáticas en torno a dos nuevas ciencias, usa el término italiano impeto, mientras que Isaac Newton en “Principia Mathematica” usa el término latino motus1 (movimiento) y vis motrix (fuerza motriz). Momento y momentum son palabras directamente tomadas del latín mōmentum, término derivado del verbo mŏvēre 'mover'. [5] La definición concreta de cantidad de movimiento difiere de una formulación mecánica a otra: en mecánica newtoniana se define para una partícula simplemente como el producto de su masa por la velocidad, en la mecánica lagrangiana o hamiltoniana se admiten formas más complicadas en sistemas de coordenadas no cartesianas, en la teoría de la relatividad la definición es más compleja aun cuando se usan sistemas inerciales, y en mecánica cuántica su definición requiere el uso de operadores auto adjuntos definidos sobre un espacio vectorial de dimensión infinita.. En mecánica newtoniana, la forma más usual de introducir la cantidad de movimiento es como el producto de la masa (kg) de un cuerpo material por su velocidad (m/s), para luego analizar su relación con las leyes de Newton. No obstante, tras el desarrollo de la física moderna, esta manera de operar no resultó ser la más conveniente para abordar esta magnitud fundamental. El defecto principal es que esta definición newtoniana esconde el concepto inherente a la magnitud, que resulta ser una propiedad de cualquier ente físico con o sin masa, necesaria para -7-.
(12) describir las interacciones. Los modelos actuales consideran que no sólo los cuerpos másicos poseen cantidad de movimiento, también resulta ser un atributo de los campos y los fotones.. La cantidad de movimiento obedece a una ley de conservación, lo cual significa que la cantidad de movimiento total de todo sistema cerrado (o sea uno que no es afectado por fuerzas exteriores, y cuyas fuerzas internas no son disipadoras) no puede ser cambiada y permanece constante en el tiempo. Para obtener la ecuación de cantidad de movimiento (momentum) en forma diferencial, es necesario recordar que la ley de conservación de cantidad de movimiento para un volumen de control, establece que la sumatoria de las fuerzas ejercidas sobre el volumen de control es igual a la tasa a la cual se acumula cantidad de movimiento dentro del volumen de control más la tasa a la cual sale cantidad de movimiento del volumen de control menos la tasa a la cual entra cantidad de movimiento al volumen de control, así:. Tasa de incremento Fuerza neta sobre el. en la cantidad de. Tasa de cantidad de. Tasa de cantidad de. volumen de control. movimiento del. movimiento. movimiento. (VC) en la dirección considerada.. =. fluido en la. +. saliendo del VC en. -. entrando en el VC. dirección. la dirección. en la dirección. considerada dentro. considerada. considerada. del VC. Empleando un volumen de control infinitesimal (Figura 2.2.1.) para mostrar las fuerzas de superficie que actúan sobre el volumen de control, se deriva una expresión para el lado izquierdo de la expresión anterior. En este caso se hace la sumatoria de fuerzas en la dirección x, esto es:. ∑ 𝐹𝑥 = (. 𝜕𝜏𝑥𝑥 𝜕𝜏𝑦𝑥 𝜕𝑧𝑥 + + ) 𝑑𝑥𝑑𝑦𝑑𝑧 − 𝜏𝑥𝑥 𝑑𝑦𝑑𝑧 − 𝜏𝑦𝑥 𝑑𝑥𝑑𝑧 − 𝜏𝑧𝑥 𝑑𝑥𝑑𝑦 𝜕𝑥 𝜕𝑦 𝜕𝑥. Al reducir términos, la ecuación anterior se puede presentar como:. ∑ 𝐹𝑥 = (. 𝜕𝜏𝑥𝑥 𝜕𝜏𝑦𝑥 𝜕𝜏𝑧𝑥 + + ) 𝑑𝑥𝑑𝑦𝑑𝑧 𝜕𝑥 𝜕𝑦 𝜕𝑥. -8-.
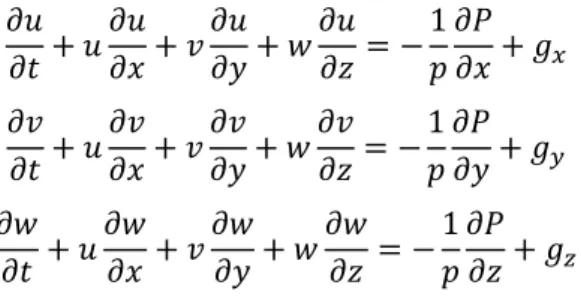
(13) Figura 2.1: Fuerzas de superficie actuando en volumen de control infinitesimal.. Por otra parte, la tasa de cantidad de movimiento acumulado dentro del volumen de control infinitesimal queda expresada por:. 𝜕 (𝑢𝑝𝑑𝑥𝑑𝑦𝑑𝑧) 𝜕𝑡 Mientras que en la Figura 2.2.2. se muestra que la cantidad de movimiento en la dirección x entrando y saliendo al volumen de control, por cada una de las caras del elemento diferencial es, respectivamente:. 𝑢𝑝𝑑𝑥𝑑𝑦𝑑𝑧 + 𝑣𝑝𝑑𝑢𝑑𝑥𝑑𝑧 + 𝑤𝑝𝑢𝑑𝑥𝑑𝑦. 𝑢 (𝑝𝑢 +. 𝜕(𝑝𝑢) 𝜕(𝑝𝑢) 𝜕(𝑝𝑢) 𝑑𝑥) 𝑑𝑦𝑑𝑧 + 𝑣 (𝑝𝑢 + 𝑑𝑦) 𝑑𝑥𝑑𝑧 + 𝑤 (𝑝𝑢 + 𝑑𝑧) 𝑑𝑥𝑑𝑦 𝜕𝑥 𝜕𝑦 𝜕𝑧. De esta forma, la ecuación de cantidad de movimiento para la dirección x es. 𝜕(𝑝𝑢) 𝜕(𝑝𝑢) 𝜕(𝑝𝑢) 𝜕(𝑝𝑢) 𝜕𝜏𝑥𝑥 𝜕𝜏𝑦𝑥 𝜕𝜏𝑧𝑥 +𝑢 +𝑣 +𝑤 = + + + 𝑝𝑔𝑥 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝜕𝑥 𝜕𝑦 𝜕𝑥. -9-.
(14) Figura 2.2: Cantidad de movimiento en x entrando y saliendo del volumen de control a través de las superficies del sistema.. Finalmente, al considerar un fluido newtoniano, es posible obtener una relación entre los esfuerzos cortantes y el campo de velocidades, figura 2.2.3.. 2 𝜕𝑢 2 𝜕𝑣 2 𝜕𝑤 ⃗ + 2𝜇 ⃗ + 2𝜇 ⃗ + 2𝜇 𝜎𝑥𝑥 = −𝑃 − 𝜇∇. 𝑉 ; 𝜎𝑦𝑦 = −𝑃 − 𝜇∇. 𝑉 ; 𝜎𝑧𝑧 = −𝑃 − 𝜇∇. 𝑉 3 𝜕𝑥 3 𝜕𝑦 3 𝜕𝑧 𝜕𝑣 𝜕𝑢 𝜕𝑤 𝜕𝑣 𝜕𝑢 𝜕𝑤 𝜎𝑥𝑦 = 𝜎𝑦𝑥 = 𝜇 ( + ) , 𝜎𝑦𝑧 = 𝜎𝑧𝑦 = 𝜇 ( + ) ; 𝜎𝑧𝑥 = 𝜎𝑥𝑧 = 𝜇 ( + ) 𝜕𝑥 𝜕𝑦 𝜕𝑦 𝜕𝑧 𝜕𝑧 𝜕𝑥. Forma diferencial de las leyes básicas. Figura 2.3: Esfuerzos normales y cortantes, en la dirección x.. - 10 -.
(15) Al sustituir estas expresiones en la ecuación de cantidad de movimiento y reducir términos, considerando propiedades del fluido constantes se tiene que la ecuación de cantidad de movimiento en x es: 𝜕𝑢 𝜕𝑢 𝜕𝑢 𝜕𝑢 1 𝜕𝑃 𝜕 2 𝑢 𝜕 2 𝑢 𝜕 2 𝑢 +𝑢 +𝑣 +𝑤 =− + ( 2 + 2 + 2 ) + 𝑔𝑥 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑥 𝜕𝑥 𝜕𝑦 𝜕𝑧. Al seguir un procedimiento similar se pueden obtener las ecuaciones de cantidad de movimiento para las direcciones y y z, respectivamente como: 𝜕𝑣 𝜕𝑣 𝜕𝑣 𝜕𝑣 1 𝜕𝑃 𝜕 2 𝑣 𝜕 2 𝑣 𝜕 2 𝑣 +𝑢 +𝑣 +𝑤 == − + ( 2 + 2 + 2 ) + 𝑔𝑦 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑦 𝜕𝑥 𝜕𝑦 𝜕𝑧. 𝜕𝑤 𝜕𝑤 𝜕𝑤 𝜕𝑤 1 𝜕𝑃 𝜕 2 𝑤 𝜕 2 𝑤 𝜕 2 𝑤 +𝑢 +𝑣 +𝑤 == − + ( 2+ + ) + 𝑔𝑧 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑤 𝜕𝑥 𝜕𝑦 2 𝜕𝑧 2. Estas expresiones en conjunto con la ecuación de continuidad forman las ecuaciones de Navier – Stokes:. 𝜕𝑢 𝜕𝑣 𝜕𝑤 + + =0 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝜕𝑢 𝜕𝑢 𝜕𝑢 𝜕𝑢 1 𝜕𝑃 𝜕 2 𝑢 𝜕 2 𝑢 𝜕 2 𝑢 +𝑢 +𝑣 +𝑤 =− + ( 2 + 2 + 2 ) + 𝑔𝑥 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑥 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝜕𝑣 𝜕𝑣 𝜕𝑣 𝜕𝑣 1 𝜕𝑃 𝜕 2 𝑣 𝜕 2 𝑣 𝜕 2 𝑣 +𝑢 +𝑣 +𝑤 =− + ( 2 + 2 + 2 ) + 𝑔𝑦 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑦 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝜕𝑤 𝜕𝑤 𝜕𝑤 𝜕𝑤 1 𝜕𝑃 𝜕 2 𝑤 𝜕 2 𝑤 𝜕 2 𝑤 +𝑢 +𝑣 +𝑤 =− + ( 2+ + ) + 𝑔𝑧 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑧 𝜕𝑥 𝜕𝑦 2 𝜕𝑧 2. 2.2.1. Ecuación de Euler Todos los fluidos reales poseen viscosidad; sin embargo, con frecuencia su Comportamiento es como si no la tuvieran. Por lo tanto, es de utilidad investigar la dinámica de un fluido ideal; esto es, un fluido incompresible con viscosidad igual a cero. El análisis del movimiento de fluidos ideales es más simple que el de flujos viscosos debido a que no existen esfuerzos cortantes y únicamente se tienen que considerar los esfuerzos normales. Para un fluido no viscoso en movimiento, el esfuerzo normal en un punto es el mismo en todas direcciones y es igual al - 11 -.
(16) negativo de la presión termodinámica. Las ecuaciones de movimiento para un flujo sin fricción, conocidas como las ecuaciones de Euler, se obtienen de la forma general de las ecuaciones de movimiento. Ya que en un flujo sin fricción no hay esfuerzos cortantes y el esfuerzo normal es igual al negativo de la presión termodinámica, las ecuaciones de movimiento para un flujo sin fricción son:. 𝜕𝑢 𝜕𝑢 𝜕𝑢 𝜕𝑢 1 𝜕𝑃 +𝑢 +𝑣 +𝑤 =− + 𝑔𝑥 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑥 𝜕𝑣 𝜕𝑣 𝜕𝑣 𝜕𝑣 1 𝜕𝑃 +𝑢 +𝑣 +𝑤 =− + 𝑔𝑦 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑦 𝜕𝑤 𝜕𝑤 𝜕𝑤 𝜕𝑤 1 𝜕𝑃 +𝑢 +𝑣 +𝑤 =− + 𝑔𝑧 𝜕𝑡 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝑝 𝜕𝑧. Sumando miembro a miembro las tres ecuaciones, tendremos:. 𝑑𝑣𝑦 𝑑𝑣𝑥 𝑑𝑣𝑧 1 𝜕𝑃 𝜕𝑃 𝜕𝑃 𝜕𝑥 + 𝜕𝑦 + 𝜕𝑧 = −𝑔 𝑑𝑧 − ( 𝑑𝑥 + 𝑑𝑦 + 𝑑𝑧) 𝑑𝑡 𝑑𝑡 𝑑𝑡 𝜌 𝜕𝑥 𝜕𝑦 𝜕𝑧. 2.3. Ecuación de la continuidad Considerando un volumen arbitrario, fijo en el espacio e inmerso en un medio continuo en movimiento que lo ocupa en cada punto y en todo instante (tal como se esquematiza en la Figura 2.3.1.) es evidente que; el balance entre la masa entrante y saliente a través de la superficie del mismo y en un instante dado, más la variación de la masa en su interior y con la variable tiempo tendiendo a cero, da inexorablemente una masa resultante nula, puesto que ésta no puede crearse ni desaparecer. [6]. Figura 2.4: Volumen de control. El principio enunciado se reduce simbólica y escuetamente como: ms me m i 0 - 12 -.
(17) En la expresión anterior m simboliza la masa y los subíndices indican “saliente”, “entrante” o “interior”. Obviamente el símbolo implica la “variación” de la masa en el tiempo y es la diferencia entre la masa final y la masa inicial en el tiempo elemental considerado. Al escribir la expresión, despejando el paréntesis que implica el balance de masa a través de la superficie lateral, la interpretación del principio de la masa puede interpretarse en forma más directa, puesto que el balance entre masa entrante y saliente por la superficie de control, es compensado por la variación de la masa en el interior del volumen de control. En símbolos:. Las ecuaciones a obtener dependen de la forma del Volumen de control adoptada. Si ésta es el cubo elemental de lados diferenciales, se obtiene la Ecuación Diferencial de Continuidad en un Punto, en cambio si el volumen de control elegido es el Tubo de corriente, la que se obtiene es la Ecuación Diferencial de Continuidad en el mismo, de suma utilidad para la consideración de los Escurrimientos Unidimensionales.. 2.3.1. Ecuación de continuidad en un punto Es la que se obtiene, al considerar como volumen de control al elemento diferencial de lados dx, dy y dz.. Figura 2.5: Volumen de control: elemento diferencial. Consecuentemente para obtener la ecuación buscada, se considera el cubo de lados diferenciales dx, dy, dz, es decir el punto material (ver Figura 2.3.2.) fijo en el espacio cartesiano. Para las tres coordenadas z; y; x; desarrollaremos el paréntesis que implica el "balance total de masa en un instante dado".. - 13 -.
(18) La masa entrante según el eje x resulta de multiplicar el "caudal de masa" según x por dt, en efecto:. 𝑑𝑞𝑚 = 𝑝𝑑𝑞 = 𝑝𝑢𝑑𝑥𝑑𝑦𝑑𝑡 = 𝑚𝑒𝑥 La masa saliente resulta:. 𝑚𝑠𝑥 = 𝑚𝑒𝑥 +. 𝜕 (𝑚 )𝑑𝑥 𝜕𝑥 𝑒𝑥. Es decir:. 𝑝𝑢𝑑𝑥𝑑𝑦𝑑𝑡 +. 𝜕 (𝑝𝑢𝑑𝑥𝑑𝑦𝑑𝑧)𝑑𝑥 𝜕𝑥. El balance o diferencia entre masa saliente y masa entrante resulta:. 𝑚𝑠𝑥 − 𝑚𝑒𝑥 =. 𝜕 (𝑝𝑢𝑑𝑦𝑑𝑧𝑑𝑡)𝑑𝑥 𝜕𝑥. Extrapolando el mismo procedimiento a los ejes y, z, se tiene:. 𝑚𝑠𝑦 − 𝑚𝑒𝑦 =. 𝜕 (𝜌𝑣𝑑𝑧𝑑𝑥𝑑𝑡)𝑑𝑦 𝜕𝑦. 𝑚𝑠𝑧 − 𝑚𝑒𝑧 =. 𝜕 (𝜌𝑤𝑑𝑥𝑑𝑦𝑑𝑡)𝑑𝑧 𝜕𝑧. Por lo que, el balance total en un instante dado, es decir la diferencia m s m e será:. 𝑚𝑠 − 𝑚𝑒 =. 𝜕 𝜕 𝜕 (𝜌𝑢𝑑𝑦𝑑𝑧𝑑𝑡)𝑑𝑥 + (𝜌𝑣𝑑𝑥𝑑𝑧𝑑𝑡)𝑑𝑦 + (𝜌𝑤𝑑𝑥𝑑𝑦𝑑𝑡)𝑑𝑧 𝜕𝑥 𝜕𝑦 𝜕𝑧. Para evaluar la variación de la masa en el tiempo, se tiene que:. ∆𝑚1 = [𝜌𝑑𝑥𝑑𝑦𝑑𝑧 +. 𝜕 (𝜌𝑢𝑑𝑥𝑑𝑦𝑑𝑧)𝑑𝑡] − 𝜌𝑑𝑥𝑑𝑦𝑑𝑧 𝜕𝑡. - 14 -.
(19) Por lo que:. ∆𝑚1 =. 𝜕 (𝜌𝑑𝑥𝑑𝑦𝑑𝑧)𝑑𝑡 𝜕𝑡. Sumando ahora e igualando a 0, con el propósito de obtener la ecuación resultante del principio de la conservación de la masa aplicada al volumen elemental de lados dx, dy, dz, y eliminando además los diferenciales comunes, se tiene:. 𝜕 𝜕 𝜕 𝜕𝜌 (𝜌𝑢) + (𝜌𝑦) + (𝜌𝑤) + =0 𝜕𝑥 𝜕𝑦 𝜕𝑧 𝜕𝑡. La que escrita en notación vectorial resulta:. 𝑑𝑖𝑣(𝜌𝑉) +. 𝜕 =0 𝜕𝑡. Si se considera =cte. en el espacio y el tiempo, la anterior se reduce a:. 𝑑𝑖𝑣𝑉 =. 𝜕𝑢 𝜕𝑣 𝜕𝑤 + + =0 𝜕𝑥 𝜕𝑦 𝜕𝑧. Que es la ecuación de continuidad para la masa específica considerada como constante, es decir que su cumplimiento, implica de por sí, una "Condición de Incompresibilidad”. 2.4. Sistemas de suministro de combustible. 2.4.1. Sistema de alimentacion diesel convencional. 2.4.1.1. Definicion. Es un sistema de inyeccion de alta presion para combustible diesel, que acaba produciendo la inyeccion de combustible dentro de los cilindros del motor justo en el momento indicado y en la cantidad justa de acuerdo al régimen de trabajo de funcionamiento del motor.. - 15 -.
(20) 2.4.1.2. Componentes de un sistema de alimentacion diesel convencional.. Figura 2.6: Circuito de Alimentación de Combustible diésel señalando sus partes: 1.- tanque 2.- bomba de transferencia 3.filtro de combustible 4.-regulador centrífugo 5.-palanca de acelerador 6.-bomba de alta presión 7.- cañería de alta presión 8.- inyector 9.-tobera.. Circuito de combustible La bomba de inyección se acompaña de un circuito de alimentación que le suministra combustible (figura 2.6). Este circuito tiene un depósito de combustible (1) que está compuesto de una boca de llenado, de un tamiz de tela metálica, que impide la entrada al depósito de grandes impurezas que pueda contener el combustible. El tapón de llenado va provisto de un orificio de puesta en atmósfera del depósito. La bomba de alimentación aspira el combustible del depósito y lo bombea hacia la bomba de inyección a una presión conveniente, que oscila entre 1 y 2 bar. El sobrante de este combustible tiene salida a través de la válvula de descarga situada en la bomba de inyección y también puede estar en el filtro, retornando al depósito. Esta válvula de descarga controla la presión del combustible en el circuito. En vehículos donde la distancia y la altura del depósito con respecto a la bomba de inyección estén muy alejados, se instala una bomba de alimentación (2), normalmente esta bomba se encuentra acoplada a la bomba de inyección. Según las condiciones de funcionamiento del - 16 -.
(21) motor y de sus características constructivas, se requieren distintos sistemas de alimentación de la bomba de inyección, como se ve en la figura inferior. Si el filtro de combustible esta en las proximidades inmediatas del motor, pueden formarse burbujas de gas dentro del sistema de tuberías. Para evitar esto resulta necesario "barrer" la cámara de admisión de la bomba de inyección. Esto se consigue instalando una válvula de descarga (6) en la cámara de admisión de la bomba de inyección. En este sistema de tuberías, el combustible sobrante vuelve al depósito de combustible a través de la válvula de descarga y de la tubería de retorno. Si en el vano del motor hay una temperatura ambiente elevada, puede utilizarse un circuito de alimentación como el representado en la figura 2.7 inferior derecha. En este circuito el filtro de combustible va instalada una válvula de descarga (7) a través de la cual una parte del combustible retorna al depósito del mismo durante el funcionamiento, arrastrando eventuales burbujas de gas o vapor. Las burbujas de gas que se forman en la cámara de admisión de la bomba de inyección son evacuadas por el combustible a través de la tubería de retorno. El barrido continuo de la cámara de admisión refrigera la bomba de inyección e impide que se formen burbujas de gas. [8, 9]. Figura 2.7: Circuito de combustible: 1.- depósito de combustible 2.- bomba de alimentación 3.- filtro de combustible 4.bomba d inyección 5.- inyector 6.- válvula de descarga 7.- válvula o estrangulador. - 17 -.
(22) 2.4.1.3. Principio de funcionamiento. El sistema de alimentación suministra el combustible a una bomba alternativa accionada por el mismo motor y sincronizada con éste, para inyectar en cada cilindro en el momento preciso, la bomba mediante unos émbolos de forma y mecanizado particular, accionados por un sistema de levas, bombea el combustible por una tubería hasta los inyectores que, con el pulso de presión del fluido, abren e inyectan el combustible que ingresa en la cámara de combustión del motor, finalmente pulverizado. La cantidad de combustible que inyecta cada émbolo de la bomba se regula haciendo girar el émbolo por medio de un sistema de piñón y cremallera, con este giro del émbolo, se pone en comunicación la cámara donde se encuentra el combustible ingresado, con una ranura helicoidal mecanizada en el émbolo, dejando salir el excedente de combustible de regreso a su depósito original, limitando así la cantidad inyectada al motor.. Figura 2.8: Descripción y funcionamiento del pistón o embolo. - 18 -.
(23) 2.4.2. Sistema de alimentacion diesel de inyeccion por acumulación (Common Rail). 2.4.2.1. Definicion. El sistema de common-rail o conducto común es un sistema electrónico de inyección de combustible para motores diésel de inyección directa en el que el gasóleo es aspirado directamente del depósito de combustible a una bomba de alta presión, y esta a su vez lo envía a un conducto común para todos los inyectores y a alta presión desde cada uno de ellos a su cilindro.. Figura 2.9: Sistema de alimentación de combustible common-rail. La idea esencial que rige el diseño es lograr una pulverización mucho mayor que la obtenida en los sistemas de bomba inyectora anteriores, para optimizar el proceso de inflamación espontánea de la mezcla que se forma en la cámara al inyectar el diésel, principio básico del ciclo Diesel. Para ello se recurre a hacer unos orificios mucho más pequeños, dispuestos radialmente en la punta del inyector (tobera), compensando esta pequeña sección de paso con una presión mucho mayor. Es esencialmente es igual a la inyección multipunto de un motor de gasolina, en la que también hay un conducto común para todos los inyectores, con la diferencia de que en los motores diésel se trabaja a una presión mucho más alta siendo de 1500 bares. [10 - 12]. - 19 -.
(24) 2.4.2.2. Componetes de un sistema de alimentacion por acumulacion.. Figura 2.10: Sistema de alimentación diésel de inyección por common rail.. Posee las mismas partes destacadas que un sistema convencional adicionando un conducto común para los inyectores, también tendrá algunos sensores que mejoraran su funcionamiento. Conducto común (common rail). La palabra "Common Rail" puede traducirse como "rampa de inyección", es decir, se hace alusión al elemento característico del sistema de inyección gasolina. La diferencia fundamental entre los dos sistemas viene dada por el funcionamiento con mayores presiones de trabajo en los motores diesel, del orden de 1350 bar que puede desarrollar un sistema "Common Rail" a los menos de 5 bar que desarrolla un sistema de inyección gasolina. Sensores principales. . Sensor de régimen o CKP para sincronizar las inyecciones a los ciclos del motor.. . Sensor de fase o CMP para distinguir entre los cilindros gemelos cuál de ellos está en. fase de compresión y cuál en escape, para inyectar en el cilindro que corresponde. . Sensor de pedal de acelerador, para detectar la carga requerida por el conductor y. según la pendiente. . Sensor de presión de Rail o RPS, para detectar la presión en cada instante.. - 20 -.
(25) 2.4.2.3. Principio de funcionamiento. El funcionamiento del Common Rail es muy similar a la inyección multipunto utilizada en motores gasolina diferenciándose en que el sistema Common Rail trabaja con mucha más presión en el circuito. En este sistema el funcionamiento consiste en que el combustible almacenado es aspirado por una bomba de transferencia y enviado hacia otra bomba, pero en este caso de alta presión que transmite el combustible a una presión aproximada de 1500 bar a un conducto común donde se encuentran situados los inyectores, encargados de introducir el gasóleo directamente al cilindro.. 2.4.3. Sistema de alimentación diésel con inyector bomba. 2.4.3.1. Definicion Es muy similar al sistema de alimentación convencional que consta de una alimentación de combustible a baja presión, una a alta presión, y la electrónica de control, que consta de sensores, unidad de control electrónica y actuadores. [12]. Figura 2.11: Despiece de un Inyector-Bomba.. - 21 -.
(26) 2.4.3.2. Componentes de un sistema de alimentacion de combustible diesel con inyector bomba. Al igual que el sistema de common rail presenta una estructura similar al convencional, quitando la bomba de alta presión y agregando este componente llamado inyector bomba. Inyector bomba. Un inyector-bomba, como dice su nombre, es una bomba de inyección con electroválvula de control y un inyector, agrupados en un solo componente, que posee las siguientes partes: . Generador de alta presión: los principales componentes del generador de alta presión. de 2000 a 3000 bar son el cuerpo de la bomba con el émbolo y el muelle de reposición. . Electroválvula de alta presión: su misión es la de determinar en qué momento y. durante cuánto tiempo se producirá la inyección de combustible. Sus principales componentes son la bobina, la aguja de la electroválvula, el núcleo magnético y el muelle de la propia electroválvula. . Los inyectores: los inyectores son los encargados de pulverizar y distribuir. uniformemente el carburante hacia las cámaras de combustión para realizar el proceso de inyección del mismo. Los inyectores se localizan junto al cuerpo de la unidad inyector-bomba mediante una tuerca de fijación.. 2.4.3.3. Principio de funcionamiento. El principio de funcionamiento es que en una misma unidad se une la generación de presión con la inyección del gasóleo, a diferencia del common rail donde la presión está en el conducto y después el inyector solo decide cuando y como dejar pasar ese combustible. Esta tecnología se utiliza en vehículos industriales desde hace mucho. Para el accionamiento se encarga un árbol de levas que determina el momento en el que se debe inyectar, y es este árbol el que aporta también la fuerza con su movimiento para generar la presión necesaria para inyectar.. 2.4.4. Selección del sistema a investigar: En este punto deseamos evaluar qué sistema sería el más indicado para el estudio de las variaciones de presión y fenómenos hidrodinámicos en el circuito de alta presión, usaremos el método de descarte desarrollándolo de la siguiente manera: . Para el sistema con bomba inyector: Debido a que no posee una tubería de alta. presión en este sistema, no podrán analizarse los fenómenos hidrodinámicos que presentara el combustible.. - 22 -.
(27) . Para el sistema common rail: En este sistema existe conducto común que está dotado. de una presión constante de 1300 bares, alimentando por la bomba de alta presión y regulado por sensores electrónicos, de esta manera la experimentación seria irrelevante, ya que las variaciones de presión serán aproximadamente cero. . Para el sistema convencional: Concluimos que este sistema es el más indicado para. realizar las experimentaciones, ya que, en las tuberías, debido a que la bomba entrega el flujo a través de la válvula impelente, saliendo por la tubería y llegando al inyector, genera fluctuaciones de presión y fenómenos hidrodinámicos que son los que se desea estudiar en este ensayo.. 2.5. Soluciones numéricas de ecuaciones diferenciales ordinarias 2.5.1. El método de pendiente constante o el método de Euler El Método de Euler es un Método de primer orden, lo que significa que el error local es proporcional al cuadrado del tamaño del paso, y el error global es proporcional al tamaño del paso. El Método de Euler sirve como base para construir Métodos más complejos. Dado un problema de valor inicial. y f (x, y). (1). y(x 0 ) y 0 Por integración de la ecuación diferencial con respecto a 𝑥 tenemos b. y=c+ f (x, y)dx. (2). a. El intervalo de 𝑥 = 𝑎 y 𝑥 = 𝑏 se subdivide en n partes iguales, cada una de longitud h, de modo que. h. ba ó b=a+nh n. (3). Donde “ℎ” el tamaño de paso “𝑛” el número de pasos. Entonces la ecuación anterior llega a ser. y=c+ . a nh. a. f (x, y)dx. (4). Si usamos solamente un paso, esto es 𝑛 = 1, para llegar a ser. y=c+. ah. a. f (x, y)dx. - 23 -. (5).
(28) La aproximación más simple para tomar en la ecuación anterior, es asumir que la pendiente 𝑓(𝑥, 𝑦) es constante sobre el intervalo a a x a h e igual a la pendiente en el punto donde. x a, y c , esto es, 𝑓(𝑎, 𝑐).En este caso llega a ser: y=c+. ah. a. f (a, c) dx c hf(a, c). (6). Fig. 2.12: Interpretación grafica del Método de Euler. Claramente, esta ecuación le dará una buena aproximación al valor de 𝑦 en. x a h. solamente si “ℎ” es pequeña. El grado de pequeñez evidentemente depende del grado de precisión deseado. En la Grafica (Fig. 1), la solución verdadera se representa por la curva punteada 𝐴𝐸. Puesto que la distancia 𝐴𝐷 = ℎ es fácil de ver que el valor de “𝑦” correspondiente está representado por la ordenada 𝑄𝐵. El error cometido está dado por 𝐵𝐸. Esto se hace más pequeño a medida que “ℎ” se hace más pequeño. Si “ℎ” es grande, el error cometido es grande. Si la longitud del intervalo de 𝑎 hacia 𝑏 es grande, parecería natural tomar valores más pequeños de “ℎ” correspondiendo a un incremento en el número de pasos, esperando de esta manera disminuir el error involucrado. Con esta idea en mente nos lleva a escribir [20]. y=c+. ah. a. f (x, y) dx . a2h. ah. f (x, y) dx ... . a nh. a (n 1)h. f (x, y) dx (7). Usando la aproximación para cada una de las integrales vemos que una aproximación, está dada por. y c hf (a, c) hf (a h, c) hf (a 2h, c2 ) ... hf (a (n1)h, cn1) (8) Donde 𝑐, es el valor de “𝑦” cuando 𝑥 = 𝑎 + 𝑗ℎ ; 𝑗 = 1,2, … , 𝑛 − 1 - 24 -.
(29) Las distintas iteraciones realizadas se indica líneas abajo (Fig. 2), vemos que A1 B1 hf a, c , la ordenada del punto B1 está dada por. c1 c hf(a,c) (9) Se calcula nueva pendiente correspondiente al punto 𝐵, cuyas coordenadas son a h, c1 ; el valor de esta pendiente está dado por f a h, c1 Usando esto, llegamos al punto 𝐵2, la distancia 𝐴2 𝐵2 , dada por hf a h, c1. . Puesto que la ordenada de 𝐵2 , es la ordenada de 𝐵1,. más la distancia 𝐴2 𝐵2 , la ordenada de 𝐵2 es. c2 c hf(a,c) hf(a k,c1). (10). Similarmente, la ordenada del punto 𝐵𝑗 es. c j c hf(a,c) hf(a h,c1) .... hf(a (j1)h,c j1). (11). y en particular. cn c hf(a,c) hf(a k,c1) .... hf(a (n1)h,cn1) (12). Fig. 2.13: Iteraciones Mediante El Método De Euler. “𝑦” es la ordenada alcanzada después de "𝑛" pasos, la cual es el valor de 𝑦, Si usamos la notación a1 a jh, j 1, 2,. , esto se puede escribir simplemente como. cn c hf(a,c) hf(a1,c1) .... hf(an1,cn1) (13). - 25 -.
(30) Así consideramos la aproximación. y(x h) y(x) hy(x) y(x) hf(x, y) (14) En el primer paso se calcula: y1 y0 hf(x0 , y0 ) En el segundo paso se calcula: y2 y1 hf(x1, y1 ) Así sucesivamente, se calcula: yn yn1 hf(xn1, yn1 ). . El Método de Euler llamado también Método de las tangentes es importante desarrollarlo debido a que es base de otros Métodos más exactos, pero más complejos.. . Debido a que la aproximación de una curva por medio de una línea recta no es exacta, se comete un error derivado del Método, a este error se le conoce como error de truncamiento.. . El error de truncamiento por paso o error de truncamiento local es de orden h2, el método se suele utilizar en la práctica debido a que la solución que proporciona acumula errores, pero no son considerables si se compara a otros Métodos.. . A pesar de la simplicidad de este Método los resultados obtenidos pueden ser buenos, llegando la precisión a ser mejor en general a medida que 𝑛 se escoge más grande.. . Para un valor grande de 𝑛, sin embargo, aunque la precisión puede ser mayor, el cómputo llega a ser más laborioso.. . El Método se adapta bien a computadores y no es difícil de programarlo.. . El método de Euler se adapta a trabajos de investigación pues los valores aproximados obtenidos muestran la tendencia en relación a los valores verdaderos.. 2.5.2. El método de Heun o método de pendiente promedio El Método De Heun llamado también el “Método De Euler Mejorado” es un Método predictorcorrector, porque en cada paso primero se predice un valor y luego se corrige. La interpretación geométrica se indica en la gráfica (Fig. 3), siendo la ordenada "𝑐1"el valor predicho y “𝑦1” el valor corregido. En el Método anterior la pendiente f x, y sobre el intervalo a x a h se remplazó por. f (a, c) de modo que el valor de “y” en x a h a1 resultó ser. c1 c hf a, c . (13). - 26 -.
(31) Una mejor aproximación se obtiene si remplazamos f x, y por el promedio de las pendientes en los puntos extremos correspondientes a x a y x a1 a h , los cuales están dados, respectivamente, por f (a, c) y f (a1 , c1 ) .Así. pendiente promedio . f (a, c) f (a1 , c1 ) 2 (14). Donde a1 a h y c1 está dado por. Usando como el valor aproximado de f (x, y) , el valor de “𝑦” en x a h a1 está dado por. y c. ah. a. [. f (a, c) f (a1 , c1 ) f (a, c) f (a1, c1 ) ]dx c h[ ] 2 2 (15). Este proceso de usar pendientes promedio se puede continuar para los intervalos sucesivos. a h x a 2h, a 2h x a 3h, etc., hasta que finalmente se tenga el valor de “𝑦” para. x =a+nh=b .Por ejemplo, en el intervalo a h x a 2h , el cual escribimos como a1 x a2 , se remplaza por. pendiente promedio . f (a1 , c1 ) f (a2 , c2 ) 2 (16). Donde c2 c1 hf a1 , c1 Y el valor de “𝑦” en x a 2h a2 está dado por. y2 c1 h[. f (a1 , c1 ) f (a2 , c2 ) ] (17) 2. Fig. 2.14: Grafica que se usan en la construcción del Método de Heun. - 27 -.
(32) . El Método de Heun es un Método predictor-corrector, a diferencia del Método del Euler que es un Método predictor.. . Es un Método de segundo orden porque el error de truncamiento por paso es de h3. . Por razones obvias este Método se llama el Método de pendiente promedio, pero también se refiere como el Método modificado de Euler.. . El Método se adapta bien a computadores y no es difícil de programarlo.. . El Método de Heun se suele utilizar en la práctica debido a que la solución que proporciona acumula errores no apreciables a lo largo del proceso, similares a los calculados por el método de Euler.. . La programación en comparación al método anterior es más laboriosa.. 2.5.3. Método de Runge-Kutta Es probable que uno de los procedimientos más difundidos y a la vez más exactos para obtener soluciones aproximadas al problema de valor inicial y’ f x, y , y xo yo . Como indica el nombre, hay Métodos de Runge-Kutta de distintos órdenes, los cuales se deducen a partir del desarrollo de y xn h en serie de Taylor [21] Desarrollando el Método de cuarto orden (como indicamos líneas arriba existen de varios órdenes) se calcula en cada paso cuatro cantidades auxiliares y luego se calcula el nuevo valor. yn+1 =yn +ak1 +bk2 +ck3 +dk4. (18). Estas constantes 𝑘1, 𝑘2, 𝑘3, 𝑘4 , mostradas en la gráfica (Fig.4), se calculan de manera que el desarrollo anterior coincida con el polinomio de Taylor de cuarto orden. Como la deducción del Método es bastante tediosa, solo damos los resultados:. k1 = hf (x n ,y n ) 1 1 k 2 = hf (x n + h,y n + k1 ) 2 2 1 1 k 3 = hf (x n + h,y n + k 2 ) 2 2 k 4 = hf (x n +h,y n +k 3 ) xn 1 =x n +h 1 yn 1 =y n + (k1 2 k 2 2 k 3 k 4 ) 6 (19). - 28 -.
(33) Fig. 2.15: aproximaciones 𝒎𝒋 a la derivada de la solución. Como se indica el desarrollo completo del Método hasta que se obtienen las expresiones dadas en (19) está más allá de nuestros objetivos y puede encontrarse en textos de Métodos numéricos avanzados, solo indicamos las constantes Los valores de estas constantes que se recogen en (19) son aproximaciones a valores de la derivada en algunos puntos de dicha función. El valor de f1 es la derivada en el extremo izquierdo, los valores de f2 y f3 son estimaciones de la derivada en el punto medio y f4 es la derivada en el extremo derecho. El nuevo punto (xn+1, yn+1) se obtiene integrando la función derivada. . La mayoría de los expertos dicen que no es recomendable trabajar con Métodos de orden superior (cuarto orden), porque el aumento del coste computacional no compensa la mayor exactitud. . A diferencia de otros Métodos, Método de Taylor, que presentan inconvenientes en el cálculo de derivadas de orden superior, el Método de Runge Kutta evita la evaluación de las derivadas parciales, esto se alcanza al evaluar, en cada paso, la función en varios puntos. . El error por truncamiento por paso es del orden de h5 y el Método es, en consecuencia, de cuarto orden.. - 29 -.
(34) 3. Modelo matemático del comportamiento de un flujo transitorio en el sistema de inyección Diésel 3.1. Condiciones del problema El sistema de combustible (fig. 3.1.) está compuesto de una bomba 1, tubería 2 e inyector 3. Se introduce combustible a la cámara de combustión 4, la presión en la misma conforma 𝑃𝑘𝑐 , el embolo buzo 5 de la bomba de inyección realiza movimiento reciproco de acuerdo a la ley que se muestra en la fig. 3.2. La carrera total del embolo buzo entre las posiciones extremas superior e inferior esta designada por 𝑆𝑃 , el volumen sobre la cavidad superior del embolo buzo 𝑉𝐻 en la posición extrema inferior del mismo es igual a 𝑉𝐻0 . La apertura de la válvula de admisión 6 se realiza automáticamente cuando la presión del combustible en el sistema de combustible 𝑃𝑃 es mayor a la presión del combustible en la cavidad sobre el embolo buzo 𝑃𝐻 . En este caso, la sección efectiva de paso de la válvula de admisión se designa como 𝑓𝐵 . La válvula impelente 7 se abre cuando la presión 𝑃𝐻 supera la presión en la cavidad de la válvula 𝑃𝐾 en el valor ∆𝑃𝐾 . El volumen en la cavidad de la valvula 𝑉𝐾 en el proceso de trabajo del sistema es constante. La sección efectiva de paso en la válvula impelente en posición abierta esta designada por 𝑓𝐾 . La longitud y el diámetro interior de la tubería está dada por LT y dT correspondientemente. El combustible de la cavidad del inyector, con volumen 𝑉𝐹 , de manera constante se introduce a la cámara de combustión a través de los orificios de pulverización, los cuales tienen una sección efectiva de paso 𝑓𝐹 . La valvula del inyector 8 se cierra automáticamente en el caso, cuando la presión del combustible en la cavidad del inyector 𝑃𝐹 es menor que la presión del combustible en la cámara de combustión 𝑃𝐾𝐶 . Para los parámetros de diseño establecidos, leyes del movimiento del embolo buzo, presiones 𝑃𝑃 y 𝑃𝐾𝐶 , temperatura del combustible 𝑇𝐶 y su densidad 𝜌20 (20 °C) determinar la cantidad de combustible suministrada a la cámara de combustión en un ciclo; asimismo, el cambio de la presión 𝑃𝐻 , 𝑃𝐾 , 𝑃𝐹 .. - 30 -.
(35) Figura 3.1: Esquema sistema de suministro de combustible del motor Diésel. Figura 3.2: Cinemática del embolo buzo de la bomba del sistema de suministro de combustible: variación de la velocidad de movimiento del embolo buzo V, aceleración a y desplazamiento S en función del tiempo - 31 -.
(36) Para el mencionado inyector, la densidad del combustible se determina por la siguiente formula: 𝜌 = 𝜌20 − [0.71 − 0.001345(𝜌20 − 850)](𝑇𝑐 − 293), kg/m3 El coeficiente isotérmico de compresibilidad del combustible: 𝛼=. 10−6 4.7034 𝜌20 − 7.823(𝑇𝑐 − 273) − 2213.6. La velocidad de propagación del sonido en el combustible 𝑎 = √1⁄𝛼𝜌. 3.2. Modelo matemático del problema De las condiciones del problema deriva, que las magnitudes que caracterizan los procesos en el sistema de combustible cuando se encuentra en funcionamiento cambian en función del tiempo. Por ello dichos procesos representan no estacionarios o transitorios. El modelo matemático del problema a resolver incluye: 1.. Ecuación del movimiento del combustible en la tubería;. 2.. Condiciones finales de frontera;. 3.. Condiciones iniciales de frontera.. 3.2.1. Ecuación del movimiento del combustible en la tubería En el cálculo del proceso de suministro de combustible viscoso por el sistema de combustible, en calidad de modelo de cálculo del medio continuo se puede utilizar el modelo de fluido compresible ideal. El sistema cerrado de ecuaciones mecánicas va incluir: -. La ecuación de Euler. -. La ecuación de la continuidad;. -. La ecuación de la barotropia.. Las ecuaciones en mención, de forma matemática, pueden ser descritas de la siguiente manera:. 𝑑𝑣 1 = 𝐹 (𝑒) − 𝑔𝑟𝑎𝑑(𝑃) 𝑑𝑡 𝜌 𝑑𝜌 𝑑𝑡. + 𝜌𝑑𝑖𝑣(𝑣) = 0. 𝜕𝑃 = 𝑎2 𝜕𝜌. - 32 -. (3.1).
(37) donde: 𝑣, 𝑃, 𝜌 – vector de velocidad, presión y densidad del combustible en un punto dado de la sección transversal de la tubería de alta presión; 𝐹 (𝑒) - densidad de las fuerzas de las masas externas; 𝑡 – tiempo; 𝑎 – Velocidad de propagación del sonido en el combustible. Para la obtención de las ecuaciones de cálculo del movimiento del combustible en la tubería de una sección constante se toma las siguientes consideraciones: 1. El flujo de combustible en la tubería representa isotérmico; 2. Se menosprecia las fuerzas de masa externas; 3. El flujo de combustible es unidimensional, es decir, hay ausencia del componente 𝑣 en la dirección perpendicular al eje de la tubería. 4. El carácter del movimiento del combustible es igual en todos los puntos de la sección dada de la tubería perpendicular a su eje. Tomando en cuenta estas consideraciones el sistema de ecuaciones (3.1) toma la siguiente forma: 𝜕𝑢 𝜕𝑢 1 𝜕𝑃 +𝑢 =− 𝜕𝑡 𝜕𝑥 𝜌 𝜕𝑥 𝜕𝜌 𝜕𝜌 𝜕𝑢 +𝑢 +𝜌 =0 𝜕𝑡 𝜕𝑥 𝜕𝑥 𝜕𝑃 = 𝑎2 𝜕𝜌 donde: 𝑥 – coordenada de la tubería a lo largo de su eje en la dirección desde la bomba de combustible hacia el inyector; 𝑢 – velocidad de movimiento del combustible a lo largo del eje de la tubería en la sección que se encuentra en la distancia 𝑥 de la sección de entrada. 𝜕𝑢. 𝜕𝑃. Menospreciando las derivadas convectivas 𝑢 𝜕𝑥 y 𝑢 𝜕𝑥 . Asimismo, 𝜕𝜌 𝜕𝑡. 𝜕𝜌 𝜕𝑃. 1 𝜕𝑃. = 𝜕𝑥 𝜕𝑡 = 𝑎2 𝜕𝑡 (3.3). El sistema (1.2) se transforma y toma la siguiente forma: 𝜕𝑢 1 𝜕𝑃 =− 𝜕𝑡 𝜌 𝜕𝑥 𝜕𝑢 𝜕𝑥. 1 𝜕𝑃. = 𝑎2 𝜌 𝜕𝑡. - 33 -. (3.4).
(38) Se obtiene un sistema de ecuaciones de diferenciales parciales de tipo hiperbólico. Si se toma en consideración, que las características físicas del combustible (∝, 𝜌) son constantes (esto es hasta 𝑃=50 – 60 MPa), entonces para el sistema (3.4) se puede obtener una solución de acuerdo a la forma de D´alamber. Para ello, diferenciamos la primera ecuación del sistema (1.4) en relación a “𝑥” y la segunda en relación a “𝑡”. 𝜕2 𝑢 𝜕𝑡𝜕𝑥. 1 𝜕2 𝑃. = − 𝜌 𝜕𝑥 2 (3.5). 𝜕2𝑢 1 𝜕2𝑃 = 2 𝜕𝑡𝜕𝑥 𝑎 𝜌 𝜕𝑡 2 Restamos de la primera, la segunda ecuación y después de algunas transformaciones obtenemos la ecuación de onda: 𝜕2 𝑃 𝜕𝑡 2 𝜕2 𝑃 𝜕𝑡 2. 𝜕2 𝑃. = 𝑎2 𝜕𝑥 2 (3.6) 𝜕2 𝑃. − 𝑎2 𝜕𝑥 2 = 0 (3.6). En forma de D´alamber 𝑃 − 𝑃0 = 𝐹(𝑡 − 𝑥⁄𝑎) − 𝑤(𝑡 + 𝑥⁄𝑎) (3.7) donde: 𝑃 – presión del combustible en el momento t en la sección transversal de la tubería que se encuentra a la distancia “𝑥” desde la entrada 𝑃0 – presión del combustible en la misma sección transversal en el momento inicial de tiempo 𝑡=0 𝐹(𝑡 − 𝑥⁄𝑎), 𝑤(𝑡 + 𝑥⁄𝑎) – funciones diferenciales, cuya forma depende de las condiciones iniciales y de frontera. 𝐹(𝑡 − 𝑥⁄𝑎) – onda directa de presión formada en la sección transversal de la tubería en el momento de tiempo 𝑡 − 𝑥⁄𝑎 y que se propaga por la tubería desde la bomba hacia el inyector con la velocidad del sonido “𝑎” 𝑤(𝑡 + 𝑥⁄𝑎) - onda reflejada de presión que se forma a la salida de la sección transversal de la tubería e inyector en el momento de tiempo.. - 34 -.
(39) 3.3.. Condiciones de frontera. La ecuación del movimiento en la tubería de alta presión se utiliza considerando las ecuaciones relacionadas con las condiciones de frontera, las cuales están determinadas por procesos en los extremos de la tubería. Particularmente para la solución de dicho problema, las condiciones de frontera están determinadas por procesos de intercambio en las cavidades unidas a los extremos de la tubería. En base al análisis másico, obtenemos en forma general ecuación para la determinación de la presión del combustible en las cavidades determinadas. En este caso, menospreciamos el movimiento de la velocidad del combustible en las cavidades; asimismo, se considera la suposición sobre, que la presión y la densidad del combustible en todos los puntos de la cavidad, en un momento dado de tiempo son iguales. Dichas suposiciones pueden ser consideradas debido a que las dimensiones geométricas de la cavidad son iguales y el tiempo de propagación del ruido entre dos puntos contrarios en la frontera son aproximadamente iguales a cero, entonces el valor de la densidad instantánea del combustible en la cavidad del volumen 𝑉 es: 𝜌=. 𝑚 𝑉. (3.11). donde: m – masa de combustible en la cavidad. Diferenciamos en relación a “𝑡” la expresión (3.11): 𝑑𝜌 𝑑𝑡. 1 𝑑𝑚. 𝑚 𝑑𝑉 ) 𝑉 𝑑𝑡. = 𝑉 ( 𝑑𝑡 −. 1 𝑑𝑚. 𝑑𝑉. = 𝑉 ( 𝑑𝑡 − 𝜌 𝑑𝑡 ) (3.12). O pasando dicha expresión a una derivada en relación al tiempo: 𝑑𝜌 𝑑𝑡. 1. 𝑑𝑚. 𝑑𝑉. = 𝛼𝑃𝑉 ( 𝑑𝑡 − 𝜌 𝑑𝑡 ) (3.13). La ecuación (3.13) señala, que el cambio de presión en cualquier cavidad está determinado por el cambio de masa de esta cavidad y su volumen. En base a lo mencionado, una ecuación absoluta se puede obtener escribiendo la ecuación para una cavidad concreta, considerando sus particularidades constructivas. 𝑑𝜌 𝑑𝑡. 𝑑𝑚 𝑑𝑡. =(. −𝜌. 𝑑𝑉 1 ) 𝑑𝑡 𝛼𝑃𝑉. - 35 -. (3.13).
(40) 3.3.1. Cavidad sobre el embolo buzo de la bomba de combustible La ecuación (3.13) para la cavidad sobre el embolo buzo de la bomba de combustible se describe de la siguiente manera:. 𝑑𝜌𝐻 𝑑𝑡. 1. 𝑑𝑚𝐻 𝑑𝑡. = 𝛼𝑃𝑉 ( 𝐻. −𝜌. 𝑑𝑉𝐻 ) 𝑑𝑡. (3.14). 𝑚𝐻 – masa de combustible en el volumen V. Se transforma la ecuación (1.14) a la siguiente forma para el cálculo respectivo: 𝑉𝐻 = 𝑉𝐻0 − 𝐹𝑃 𝑆 (3.15). donde: 𝐹𝑃 =. 2 𝜋𝑑𝑃 4. – área de la sección transversal del embolo buzo;. 𝑆 - desplazamiento corriente del embolo buzo.. Diferenciando la ecuación 3.15 en relación del tiempo, se obtiene. 𝑑𝑉𝐻 𝑑𝑡. 𝑑𝑆. = −𝐹𝑃 𝑑𝑡 = −𝐹𝑃 𝜗 (1.16). donde: 𝜗 – velocidad del embolo buzo de la bomba de combustible. El cambio de la masa de combustible en una unidad de tiempo en la cavidad 𝑉𝐻 , en caso general, está determinado por la velocidad másica de ingreso del combustible a dicha cavidad. 𝑑𝑚𝐵 𝑑𝑡. del. sistema designado a través de la válvula de admisión, así como también, por la velocidad másica de salida del combustible (. 𝑑𝑚𝐻𝐾 ) 𝑑𝑡. de la cavidad 𝑉𝐻 a la cavidad 𝑉𝐾 , por medio de la sección. transversal de la válvula impelente.. 𝑑𝑚𝐻 𝑑𝑡. =. 𝑑𝑚𝐵 𝑑𝑡. −. 𝑑𝑚𝐻𝐾 𝑑𝑡. (3.17). Entonces en su conjunto considerando las correlaciones 3.15, 3.16, 3.17, la ecuación 3.14 toma la siguiente forma:. 𝑑𝜌𝐻 𝑑𝑡. = 𝛼𝑃(𝑉. 1. 𝐻0 −𝐹𝑃 𝑆). 𝑑𝑚𝐵 𝑑𝑡. (. −. - 36 -. 𝑑𝑚𝐻𝐾 𝑑𝑡. − 𝜌𝐹𝑃 𝜗) (3.18).
(41) Para la utilización de la ecuación (3.18) en el cálculo de la presión del combustible en la cavidad sobre el embolo buzo es necesario establecer la expresión para la determinación de las magnitudes variables que la integran: 𝑆, 𝑉,. 𝑑𝑚𝐵 𝑑𝑡. ,. 𝑑𝑚𝐻𝐾 . 𝑑𝑡. En correspondencia con la fig.3.2 el desplazamiento 𝑆 y la velocidad 𝜗 del embolo buzo de la bomba de combustible se determina de la siguiente manera, de acuerdo a las siguientes formulas: -. Para el desplazamiento 𝑆: 𝑎𝑃1 𝑆1 + 𝜗1 (𝑡 − 𝑡1 ) + 𝑎𝑃2 𝑎𝑃1. -. 𝑡2 , 2. 𝑠𝑖 0 ≤ 𝑡 ≤ 𝑡1. (𝑡−𝑡1 )2 , 2. (2𝑡2 − 𝑡1 ) , 2. 𝑠𝑖 𝑡1 ≤ 𝑡 ≤ (2𝑡2 − 𝑡1 ) 𝑠𝑖 (2𝑡2 − 𝑡1 ) ≤ 𝑡 ≤ 2𝑡2. Para la velocidad 𝜗 𝑎𝑃1 𝑡,. 𝑠𝑖 0 ≤ 𝑡 ≤ 𝑡1. 𝜗1 + 𝑎𝑃2 (𝑡 − 𝑡1 ), 𝑎𝑃1 (2𝑡2 − 𝑡1 ),. 𝑠𝑖 𝑡1 ≤ 𝑡 ≤ (2𝑡2 − 𝑡1 ) 𝑠𝑖 (2𝑡2 − 𝑡1 ) ≤ 𝑡 ≤ 2𝑡2. Se describe la fórmula para la determinación de las constantes:. 𝑡 = √𝑎 𝑡2 =. 2𝑆𝑃 𝑎𝑃2 𝑃1 (𝑎𝑃2 −𝑎𝑃1 ). 𝑎𝑃2 −𝑎𝑃1 𝑡1 ; 𝑎𝑃2. 𝑆1 = 𝑎𝑃1. 𝑡12 2. (3.21). (3.22). ; (3.23). 𝜗1 = 𝑎𝑃1 𝑡1 ; (3.24). - 37 -. (3.19).
(42) La velocidad másica de ingreso del combustible a la cavidad sobre el embolo buzo a través de la válvula de admisión en relación a las correlaciones relacionadas con la presión 𝑃𝐻 y 𝑃𝐾 se determina de acuerdo a las formulas:. 𝑑𝑚𝐵 𝑑𝑡. =. 2 𝜌. 𝜌𝜗𝐵 𝑓𝐵 = 𝜌𝑓𝐵 √ (𝑃𝐻 − 𝑃𝐾 ), 0 (𝑐𝑒𝑟𝑜),. 𝑠𝑖 𝑃𝐻 > 𝑃𝐾. (3.25). 𝑠𝑖 𝑃𝐻 < 𝑃𝐾. donde: 𝜗𝐵 – velocidad de flujo de combustible a través de la sección transversal de la válvula de admisión.. La velocidad másica del flujo de combustible desde la cavidad sobre el embolo 𝑉𝐻 a la cavidad de la válvula de impulsión 𝑉𝐾 en relación a las correlaciones relacionadas con la presión 𝑃𝐻 y 𝑃𝐾 se determina de acuerdo a las siguientes formulas: 𝑑𝑚𝐻𝐾 𝑑𝑡. 2. = 𝜌𝜗𝐻𝐾 𝑓𝐾 = 𝜌𝑓𝐾 √𝜌 (𝑃𝐻 − 𝑃𝐾 ), 𝑠𝑖 𝑃𝐻 > (𝑃𝐾 + ∆𝑃𝐾 ) (3.27). 0 (𝑐𝑒𝑟𝑜), 𝑠𝑖 𝑃𝐻 ≤ (𝑃𝐾 + ∆𝑃𝐾 ) (es cero cuando la válvula está cerrada). donde: 𝜗𝐻𝐾 – velocidad de flujo del combustible a través de la sección transversal de la válvula de impulsión.. 3.3.2. Cavidad de la válvula de impulsión de la bomba de combustible La ecuación 3.13 para la cavidad 𝑉𝐾 va a tener la siguiente forma: 𝑑𝜌𝐾 𝑑𝑡. 1. 𝑑𝑚𝐾 𝑑𝑡. = 𝛼𝑃𝑉 ( 𝐾. −𝜌. 𝑑𝑉𝐾 ) 𝑑𝑡. (3.28). donde: 𝑚𝐾 – masa de combustible en la cavidad 𝑉𝐾 .. Como la cavidad 𝑉𝐾 en el proceso de trabajo de la bomba de combustible se puede considerar constante, entonces:. - 38 -.
(43) 𝑑𝑉𝐾 𝑑𝑡. El cambio de la masa de combustible a esta cavidad. 𝑑𝑚𝐻𝐾 𝑑𝑡. 𝑑𝑚𝐾 𝑑𝑡. =0.. está determinada por la velocidad másica de ingreso. desde la cavidad sobre el embolo a través de la válvula de impulsión, y por. la velocidad másica de salida del combustible desde la cavidad 𝑉𝐾 hacia la tubería. Teniendo en cuenta la ecuación 3.28, la ecuación 3.27 se describe de la siguiente manera:. 𝑑𝜌𝐾 𝑑𝑡. =. 1 𝑑𝑚 ( 𝐾 𝛼𝑃𝑉𝐾 𝑑𝑡. − 𝜌𝑓𝑇 𝑢(0)) (3.29). 𝑢(0) – velocidad del combustible a la entrada de la sección de la tubería, es decir, cuando 𝑥=0.. 𝐹𝑇 =. La magnitud. 𝑑𝑚𝐻𝐾 𝑑𝑡. 2 𝜋𝑑𝑇 4. ;. se determina de acuerdo a la formula (3.26). 3.3.3. Cavidad del inyector La ecuación (3.13) correspondiente a la cavidad del inyector se describe de la siguiente manera:. 𝑑𝜌𝐹 𝑑𝑡. 1. 𝑑𝑚𝐹 𝑑𝑡 𝐹. = 𝛼𝑃𝑉 (. −𝜌. 𝑑𝑉𝐹 ) 𝑑𝑡. (3.30). donde: 𝑚𝐹 – masa del combustible en la cavidad correspondiente al inyector. La cavidad 𝑉𝐹 se puede considera constante (𝑉𝐹 = 𝑐𝑜𝑛𝑠𝑡.), entonces: 𝑑𝑉𝐹 𝑑𝑡. = 0 (1.31). - 39 -.
Figure


+7






Documento similar
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Para ello, trabajaremos con una colección de cartas redactadas desde allí, impresa en Évora en 1598 y otros documentos jesuitas: el Sumario de las cosas de Japón (1583),
En junio de 1980, el Departamento de Literatura Española de la Universi- dad de Sevilla, tras consultar con diversos estudiosos del poeta, decidió propo- ner al Claustro de la
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
Dada la endogeneidad de la respuesta de la política monetaria a la evolución prevista para la economía, esta evolución de las cotizaciones bancarias ante sorpresas monetarias puede
[r]
