Reconocimiento de patrones aplicado a la exposición fotográfica
127
0
0
Texto completo
(2) ,. Indice de contenido Intoducción 1 Fotografía ................................................................................................... 1.1 1.1 Exposición fotográfica ........................................................................... 1.1 1.2 Clasificación de escenas ........................................................................ 1.2 1.3 Sistemas de exposición fotográfica .......................................................... 1.5 1.4 "Guía para la exposición fotográfica" ....................................................... l. 7 1.4.1 Método corto para determinar la exposición. "Regla f/16" .................. l. 7 1.4.2 Cálculo de exposición para escenas a plena luz del día ...................... l. 7 1.5 Sistemas aritmético de unidades de exposición ........................................... 1.9 1.6 Niveles de luminancia para escenas de tipo paisaje y latitud de una película .. 1.11 1. 7 Bibliografía ......................................................................................... 1.13 2 Reconocimiento de patrones .......................................................................... 2 .1 2.1 Sistema de reconocimiento de patrones ................................................... 2.1 2.2 Dispositivo de carga acoplada (CCD) ..................................................... 2.2 2.3 Formato BMP ..................................................................................... 2.3 2.4 Convolución digital .............................................................................. 2.5 2.5 Filtros ................................................................................................ 2.6 2.5.1 Filtros pasa bajas .................................................... :············; ....... 2.7 2.5.2 Filtros pasa altas ......................................................................... 2.9 2.5.1 Filtros pasa banda ........................................................................ 2.9 2.6 Contornos .......................................................................................... 2.10 2.7 Segmentos ......................................................................................... 2.11 2.8 Selección de Características ................................................................. 2.12 2. 9 Clasificadores .............................................................................. :. .. . . 2 .12 2.9.1 Redes Neuronales ...................................................................... 2.14 2.10 Bibliografía.................................................................................... 2.19 3 Sistema de reconocimiento de patrones para determinar la exposición fotografía ... 3 .1 3 .1 Extracción de la información ................................................................. 3. 2 3.1.1 Normalización ............................................................................. 3.3 3.1.2 Filtrado ..................................................................................... 3.3 3.1.3 Laplaciano .................................................................................. 3.6 3 .1. 4 Segmentación .............................................................................. 3. 7 3. 2 Clasificador .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 3 .1 O 3.2.1 Valor de Exposición de las imágenes empleadas .............................. 3.10 3.2.2 Luminancia-Área de los segmentos ............................................... .3.11 3.3 Entropía ............................................................................................ 3.14 3.4 Bibliografía ....................................................................................... 3.16.
(3) 4 Resultados ................................................................................................... 4.1 4. 1 Extracción de información .................................................................... 4.1 4. 2 Imágenes de entrenamiento ................................................................... 4. 2 4. 3 Imágenes de validación ....... : .................. , ............................................ 4.3 4. 4 Resultado del entrenamiento de la red neuronal ...................................... 4.4 4. 5 Validación del entrenamiento ....................................... ·........................ 4.5 4. 6 Aplicación del sistema ........................................................................ 4.6 4. 7 Bibliografía ...................................................................................... 4 .13. 5 Conclusiones ........................................................... :. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 .1 Fotografía . . . . . .. . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2 Reconocimiento de patrones aplicado a la exposición fotográfica ............... 5.2.1 Extracción de información ........................................................... 5.2.2 Clasificador ......................... .................. ........................ ...... ...... 5. 3 Perspectivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . .. 5 .1 5 .1 5.2 5.2 5.2 5. 3. Apéndice A ................................................................................................... A.1 Apéndice B ................................................................. .- ................................. B.1 Apéndice C ................................................................................................... C. l Apéndice D ................................................................................................... D .1.
(4) ,. Indice de figuras Figura 1.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 1.1 Figura 1.2 .................................................................................................... 1.1 Figura 1.3 ........................... :........................................................................ 1.2 Figura 1.4 . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 1.3 Figura 1.5 .................................................................................................... 1.3 Figura 1.6 ........................... ·......................................................................... 1.3 Figura 1.7 .................................................................................................... 1.4 Figura 1.8 ..................................................................................................... 1.4 Figura 1.9 ..................................................................................................... 1.4 Figura 1.10 ................................................................................................... 1.5 Figura 1.11 ................................................................................................... 1.5 Figura 1.12 Pentax PZ-1 ................................................................................... 1.6 Figura 1.13 Nikon N90 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . .. . . . . .. . . . . . . . .. . . . . . . . . . . .. . . . . . . . . . 1. 7 Figura 1.14 Minolta 9xi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. 3 Figura 2.1 Cabecera de Mapa de Bits ................................................................ 2.3 Figura 2.2 Cabecera de Información ................................................................ 2.4 Figura 2.3 Estructura de la Paleta .................................................................... 2.4 Figura 2.4 Estructura RGBQUAD ................................................,. .................. 2.4 Figura 2.5 Sistema lineal ................................................................................ 2.5 Figura 2.6 Convolución entre un filtro y una imagen .......................................... 2.5 Figura 2.7 Distribución Gaussiana Binomial ...................................................... 2.8 Figura 2.8 Laplaciano de la Gaussiana ............................................................. 2.9 Figura 2.9 Taxonomía de los métodos de reconocimiento de patrones ................. 2.13 Figura 3.1 Diagrama a bloques del sistema de exposicón fotográfica .................... Figura 3.2 Imagen original ............................................................................. Figura 3. 3 Imagen normalizada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3.4 Imagen original ............................................................................. Figura 3.5 Imagen normalizada ....................................................................... Figura 3.6 Tratamiento de pixeles de la orilla de la imagen ................................. Figura 3.7 Mediana 3x3 ................................................................................. Figura 3.8 Mediana 3x3 ................................................................................. Figura 3.9 Mediana 5x5 ................................................................................. Figura 3.10 Mediana 5x5 ............................................................................... Figura 3 .11 Código de II shellsort 11 • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • Figura 3 .12 Puntos de inflexión . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3 .13 Puntos de inflexión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3.14 Fragmento de la matriz de los puntos de inflexión ............................ Figura 3 .15 Estructura dinámica resultante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 3.2 3.3 3. 3 3.3 3.3 3.4 3.4 3.4 3.4 3.4 3. 5 3. 7 3. 7 3.7 3. 8.
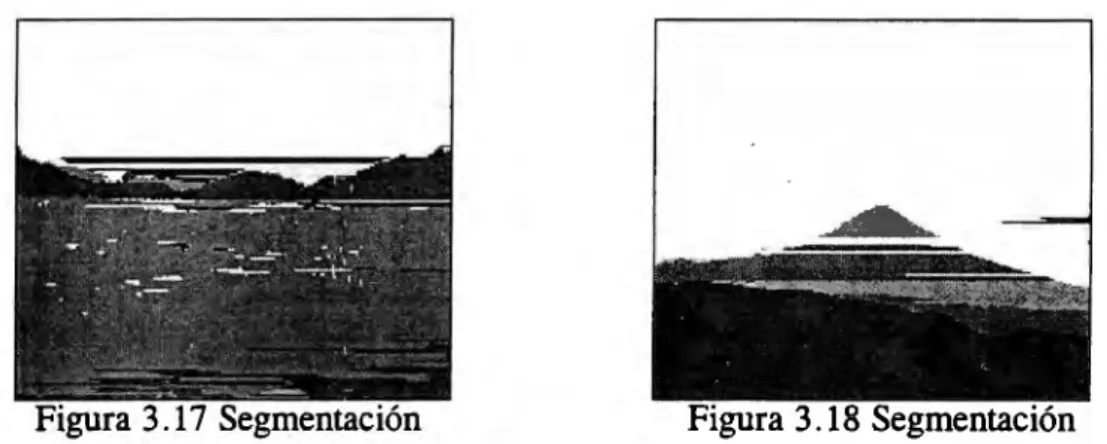
(5) Figura 3 .16 Unión de fracciones de línea .. .. .. .. . .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . .. .. .. .. .. . 3. 8 Figura 3.17 Segmentación............................................................................. 3.9 Figura 3.18 Segmentación............................................................................. 3.9 Figura 3 .19 Estructura de la red neuronal . . . . . . . . . . . .. .. .. .. . . . . . .. . . . .. . . . . . . . . . . . . . . . . . . . ... .. 3 .12 Figura 3 .20 Archivo para el entrenamiento de la red neuronal ............................ 3 .13 Gráfica 4.1 Error del grupo de entrenmiento y del grupo de validación................ Gráfica 4.2 Aprendizaje= 0.74, momentum = 0.87, e = 0.22, error= O.O....... 4.4 4.5. Figura 4.1 Fotografía 1 A=16, T=l/30 .......................................................... 4.7 Figura 4.2 Fotografía 2 A=16, T=l/8 .......................................................... 4.7 Figura 4.4 Fotografía 3 A= 16, T= 1/60 .......................................................... 4.8 Figura 4.4 Fotografía 4 A= 16, T= 1/15 .......................................................... 4.8 Figura 4.5 Fotografía 5 A= 16, T= 1/4 ...................................... .................... 4.9 Figura 4.6 Fotografía 6 A= 16, T= 1/8 ...................................... .................... 4.9 Figura 4. 7 Imagen digital de la Fotografía 1 ..................................................... 4.10 Figura 4.8 Segmentación de la Fotografía 1 ..................................................... 4.10 Figura 4. 9 Imagen digital de la Fotografía 2 ..................................................... 4.10 Figura 4.10 Segmentación de la Fotografía 2 .................................................... .4.10 Figura 4 .11 Imagen digital de la Fotografía 3 .. .. . . .. .. . . .. . .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. . .. .. 4 .10 Figura 4.12 Segmentación de la Fotografía 3 ..................................................... 4.10 Figura 4.14 Imagen digital de la Fotografía 4 .................................................. 4.11 Figura 4 .14 Segmentación de la Fotografía 4 ................................................ , ..... 4 .11 Figura 4 .15 Imagen digital de la Fotografía 5 ................................ :.................. .4 .11 Figura 4.16 Segmentación de la Fotografía 5 .................................................... .4.11 Figura 4 .17 Imagen digital de la Fotografía 6 . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 .11 Figura 4.18 Segmentación de la Fotografía 6 ..................................................... 4.11.
(6) ,. Indice de tablas Tabla Tabla Tabla Tabla. 1.1 1.2 1.3 1.4. Valores de luz incidente (lv) para una latitud 20º norte y sur ........ ... .... Incremento de exposición por ángulo de incidencia . .. ........ .. . .. ... .. . ....... Incremento de exposición debido a las condiciones del cielo . . . . . . . . . . . . . . . . . Valores redondeados y precisos de los parámetros fotográficos T ,-A y S. 1.8 1.8 l. 9 1.10. Tabla 3.1 Valores de exposición de las 75 imágenes empleadas ....... ;................. 3.10 Tabla 3.2 Información de las Figuras 3.2 y 3.4 ................................................ 3.11 Tabla 4.1 Tabla 4.2 Tabla 4.3 Tabla 4.4. Sementación de las imágenes 1 a 3 ................ ................ ........ ........... 4.1 Conjunto de imágenes de entrenamiento y su entropía .................. 4.2 - 4.3 Conjunto de imágenes de validación .................................................. 4.4 Información resultante del sistema para determinar la exposición fotográfica ......................... ........................................ .. ................. 4.5.
(7) Abstract. La exposición fotográfica es un problema complejo que aún las cámaras fotográficas más sofisticadas (sistemas de zonas con forma predefinida) no resuelven satisfactoriamente en todos los casos. En esta tesis se desarrolla un sistema capaz de calcular la exposición fotográfica para escenas de tipo "paisaje" extrayendo las características de la imagen para alimentar una red neuronal. La extracción de los datos característicos de la imagen se hace mediante una segmentación de la misma, para obtener regiones con la forma de los elementos que componen la escena. Se hacen conjuntos de patrones (validación y entrenamiento) en función de la entropía de cada imagen. Estos conjuntos se usan para el proceso de entrenamiento y validación de la red neuronal. Se emplea el método de entrenamiento "Propagación hacia atrás con momentum y eliminación de punto plano"..
(8) Introducción Los avances tecnológicos han permitido al hombre simplificar diversas tareas de su actividad cotidiana. Tal es el caso de la fotografia, donde el proceso de plasmar imágenes en papel se ha ido mejorando y facilitando cada vez más. Las cámaras modernas dan más opciones de composición y apoyan al fotógrafo en la exposición de la película fotográfica. Sin embargo, la determinación automática de la exposición no es confiable en el 100% de los casos. El problema de la exposición fotográfica consiste en encontrar la combinación de velocidad de obturación y apertura de diafragma para exponer adecuadamente la película fotográfica. La emulsión fotográfica de la película tiene un rango de sensibilidad a la cantidad de luz que in"Cide sobre ella. Si recibe una cantidad de luz mayor al límite superior del rango de sensibilidad, se dice que la película queda "sobreexpuesta"; en el caso contrario, la película queda "subexpuesta". En ambas situaciones el evento no queda registrado adecuadamente. En la actualidad aún los sistemas más sofisticados no pueden determinar correctamente la exposición para todas las escenas que se le puedan presentar al fotógrafo. Las cámaras fotográficas más modernas cuentan con sistemas de medición de luz de multizona, donde la escena se divide en zonas y dependiendo de la programación que hace el usuario se calcula la exposición fotográfica. La programación del usuario indica al sistema el tipo de escena que se va a tomar para que haga las correcciones de exposición pertinentes. La forma en que se divide la escena y el número de secciones que se hace, está en relación con la marca de la cámara. Existen sistemas que dividen la escena en zonas de forma predefinida (hexágonos, rectángulos, etc.) en un número que van de 8 zonas (Pentax) hasta 16 zonas (Minolta). Las pruebas hechas a estos sistemas indic&1 que una cámara moderna no es capaz de identificar cuál es la mejor exposición. Los métodos empleados hasta el momento no aseguran el éxito de exposición en su totalidad. Por lo tanto es necesario seguir trabajando para la mejora de estos sistemas. En el presente reporte se explica el desarrollo de un sistema de exposición que extrae la información de imágenes previamente digitalizadas, mediante técnicas de procesamiento digital de señales. Esta información alimenta una red neuronal que determina cual es la exposición que debe darse a una escena. Parte importante del procesamiento de la imagen es la segmentación, que permite dividirla en regiones acordes a la forma de los elementos que componen la escena. En capítulos siguientes se desarrollan temas como la fotografia, el reconocimiento de patrones, el sistema de reconocimiento de patrones para determinar la exposición fotográfica y los resultados obtenidos. En el Capítulo 1 se describe lo que es la fotografia, en que consiste el problema de la exposición y dos estándares internacionales para determinar la exposición fotográfica. En el Capítulo 2 se da un repaso de los diferentes.
(9) sistemas de reconocimiento de patrones que existen, así como las técnicas empleadas en el procesamiento digital de imágenes. En el Capítulo 3 se analiza el sistema desarrollado, mostrando que técnicas particulares se emplearon para el procesamiento de la información y la clasificación de los datos obtenidos hasta obtener el valor de exposición. En el Capítulo 4 se presentan los resultados de los experimentos hechos que incluyen fotografias tomadas con los valores de exposición indicadas por el _sistema desarrollado. En el Capítulo 5 se encuentran las conclusiones del trabajo. En los apéndices se puede ver la aplicación de un estándar internacional para determinar el valor de exposición de las imágenes usadas en este trabajo, una guía de instalación y uso del Simulador de Redes Neuronales SNNS y tablas de información obtenidas en _las diferentes etapas de los procesos del sistema..
(10) 1 Fotografía En este capítulo se analiza el problema de la exposición fotográfica, los parámetros que intervienen y los estándares internacionales que existen. Además se comenta sobre los diferentes tipos de sistemas. de exposición fotográfica que se encuentran en comercialmente. La fotografía es una actividad que el hombre ha realizado hace más de cien años, buscando inmortalizar eventos significativos dentro de su existencia o expresar sus sentimientos a través de este medio. Para dejar claro que es la fotografía se define enseguida: "La fotografía es el arte de fijar y reproducir, mediante reacciones químicas, en superficies convenientemente preparadas, las imágenes recogidas en la cámara obscura" [1].. 1.1 Exposición fotográfica La exposición fotográfica es el proceso de regulación del tiempo y cantidad de luz que debe recibir la película fotográfica. Los elementos que intervienen en este proceso son la velocidad de obturación, la apertura de diafragma, la sensibilidad de la película y la luminancia de la escena.. Obturador Figura 1.1 Cámara fotográfica. Figura 1. 2 Objetivo. El obturador es una cortina que permite el paso de la luz durante un tiempo determinado (fracciones de segundo, segundos o minutos). Este es un período de exposición que el fotógrafo puede modificar para captar escenas con elementos en movimiento (por ejemplo, una fotografía de un evento deportivo). Conforme se disminuya el período de exposición (aumento de velocidad de obturación) es posible. 1.1.
(11) captar escenas con mayor velocidad. Esto quiere decir que el objeto en movimiento quedará "congelado" . El diafragma es una abertura variable en el objetivo 1 de la cámara que modifica la cantidad de la luz que se deja pasar a la película. El efecto que produce el cambio en la apertura del diafragma es la variación de la "profundidad de campo" 2 • A menor apertura de diafragma, mayor profundidad de campo y viceversa. Las condiciones de luz y los elementos que conforman la escena determinarán el grado de luminancia3 que se tiene. Esta luminancia produce ·zonas con mayor o menor saturación en la película fotográfica. El conjunto de zonas formará una imagen idéntica a la escena, donde se van a poder apreciar los componentes de la misma (personas, animales, estructuras, etc.) y su ubicación relativa. La sensibilidad de la película es una medida de la capacidad de reacción de la emulsión fotográfica a la luz. Si la película recibe una cantidad de luz mayor al límite superior del rango de sensibilidad, se dice que la película queda "sobreexpuesta"; en el caso contrario la película queda "subexpuesta" . En ambas situaciones, el evento no queda registrado adecuadamente.. 1.2 Clasificación de escenas Las escenas comunes presentan patrones típicos en función del tema que se va a fotografiar. Una clasificación basada en la experiencia de fotógrafos[2] y una descripción de sus componentes se presenta enseguida.. • • • • • • • • •. Retrato Paisaje Periodismo Desnudo Niños Naturaleza Deportes y acción Arquitectura Naturaleza muerta. Figura 1.3. 1. Objetivo, es el sistema óptico que conduce la luz a la película fotográfica. Profundidad de campo, es el espacio que está adelante y detrás del objeto de interés que permanece nítido (es decir, bien enfocado). 3 Luminancia, es el flujo luminoso por unidad de área que se recibe de un objeto por reflexión; se mide en luxes. 2. 1.2.
(12) Retrato. Se puede apreciar que el tema principal se encuentra en el centro de la imagen, ahí se localizan zonas de cambios de contraste. Por lo regular el fondo tiene una luminancia de magnitud uniforme. Para este tipo de escenas se requiere poca profundidad de campo. Observe la Figura 1.3.. Paisaje. Presenta gran número de zonas con contrastes; los objetos se hallan en la mitad inferior de la imagen. En la mitad superior predominan las zonas con luminancia similar. Se requiere gran profundidad de campo.. Figura 1.4. Periodismo. El tema principal .ocupa la mayor parte de la escena; pueden ser uno o varios objetos. Existen contrastes bruscos. Y se requiere gran profundidad de campo.. Figura 1.5. Niños. El sujeto usualmente está en el centro de la escena; hay grandes contrastes de luz. Se requieren de velocidades de obturación altas (menor a 1/250 de segundo).. Figura 1.6. 1.3.
(13) Desnudo. El tema principal ocupa el centro de la imagen. Los contrastes que existen no son tan fuertes. Se emplea gran profundidad de campo.. Figura 1.7. Naturaleza.El objeto principal ocupa la mayor parte de la imagen. Tiene regiones grandes con niveles de luminancia similar. Existen altos contrastes. Son fotos de acercamiento que requieren de gran profundidad de campo.. Figura 1.8. Deportes y acción. Existen grandes contrastes. Se presenta el sujeto principal centrado. Es necesario el uso de velocidades de obturación altas (menor a 1/250 de segundo).. Figura 1.9. 1.4.
(14) Arquitectura. El sujeto ocupa la mayor parte de contrastes.. la. imagen.. Hay. muchos. Figura 1.10. Naturaleza muerta. Se tienen varios objetos situados en toda la escena. Altos contrastes. Es fotografía de acercamiento que requiere de gran profundidad de campo.. Figura 1.11 Como se puede apreciar en las figuras anteriores, la clasificación se ha hecho en función del motivo de cada una de las escenas y no en función de la luminancia que se tiene.. 1.3 Sistemas de exposición fotográfica En la composición de una fotografía se consideran el motivo de la escena y la luminancia de la misma. El motivo de la escena definirá si se requiere una profundidad de campo amplio o reducido y una velocidad de obturación alta o baja. Sin embargo, la luminancia es el principal factor para determinar la exposición. La luminancia es la variable independiente del proceso de exposición fotográfica. Hay diferentes formas para determinar la exposición de la escena. Una manera consiste en el cálculo de la exposición en función del lugar, la hora del día y las características particulares de la escena. También existen instrumentos de medición de luz como son los exposímetros, con los cuales se puede tomar una lectura de la luminancia de la escena o de una parte de ella;. 1.5.
(15) transformando el valor de luminancia a velocidad de obturación y apertura de diafragma. Comercialmente se pueden encontrar exposímetros analógicos y digitales. Muchas cámaras ya tienen un exposímetro integrado; el usuario puede medir la luz que llega a la cámara y manualmente modificar la velocidad de obturación y apertura del diafragma hasta encontrar la combinación adecuada. Las cámaras fotográficas más sofisticadas poseen sistemas de medición de luz que automáticamente modifican la velocidad de obturación y la apertura del diafragma. Son sistemas de medición de luz multizona, donde la escena· se divide en regiones y se considera el tipo de escena que se va a tomar; previamente el usuario indica el tipo de la escena. La forma de división de la escena y el número de secciones está en relación con la marca de la cámara. Existen sistemas que pueden dividir la escena en desde 8 zonas (Figural.12 y Figura 1.13, Pentax y Nikon respectivamente) hasta las que emplean 16 zonas (Figura 1.13, Minolta).. Figura 1.12 Pentax PZ-1. Figura 1.13 Nikon N90. Figura 1.14 Minolta 9xi. Una prueba hecha por la revista Popular Photography [3], hace una comparación entre 17 cámaras SLR (Single Lens Reflex) de las marcas: Canon, Minolta, Nikon, Pentax y Sigma, mostrando los resultados de los sistemas de medición en 7 escenas diferentes. Los resultados que da el experimento de fotografiar la misma escena, con las mismas condiciones de luz, varían según la cámara que se emplee y el modo de operación escogido. Estas pruebas indican que una cámara moderna no es capaz de identificar cuál es la mejor exposición. Los métodos empleados hasta el momento no aseguran el éxito de exposición en su totalidad. Por lo tanto se puede afirmar que es necesario seguir trabajando para la mejora de los mismos. La conclusión a la que llega el grupo evaluador es que a mayor número de segmentos en los que se divida la escena, la medición resultante representa mejor las condiciones de luz que existen.. 1.6.
(16) 1.4 "Guía para la exposición fotográfica" La norma American National Standard for Photogrphy - Photogrphic Exposure Guide [4], tiene como propósito proveer información sobre la iluminación producida por el sol, la luna y fuentes artificiales, para encontrar la exposición adecuada de la película fotográfica. En otras palabras; determinar la velocidad de obturación y apertura de diafragma correspondientes a la situación particular. A continuación se resumen la "Regla f/16" y cálculo de la exposición para escenas a plena luz del día. 1.4.1 Método corto para determinar la exposición. "Regla f/16" La "Regla f/16" es una forma simple para obtener fotografías bien expuestas, que se aplica a la situación de un fotógrafo casual. Esta regla es un método confiable para escenas con sujetos iluminados de frente en días claros, con el sol bien arriba del horizonte. Consiste en fijar la apertura del diafragma a f/16 y la velocidad de obturación se obtiene con la relación 1/ISO [5][6] (o en su defecto 1/ASA; donde ISO o ASA es la sensibilidad de la película). Así, si se tiene una sensibilidad ISO= 100, la velocidad de obturación es 1/125 (que es la velocidad más cercana a 1/100; este; valor también es definido por la ANSI [7]). En caso de que el cielo esté nublado, se emplean las compensaciones siguientes + 1 paso4, con neblina densa o una capa de nubes delgada. +2 pasos, con nubosidad brillante. +3 pasos, muy nublado o con el sujeto a la sombra en un día claro.. 1.4.2 Cálculo de exposición para escenas a plena luz del día Para los fines de este trabajo donde se consideran condiciones de luz a plena luz del día, enseguida se presentan sólo los pasos para el cálculo de la exposición de una escena a plena luz del día.. 1 Determinar la luz incidente de la escena (valor IJ. Este valor se obtiene considerando la latitud a la que se encuentra la escena, el mes y la hora del día.. 4. "paso", es el intervalo de los parámetros fotográficos con el que se define al aumento o disminución de la exposición. AJ sumar un paso se aumenta la exposición al doble (por ejemplo, modificar la velocidad de obturación de 1/125 a 1/60); en caso de restar un paso, se disminuye la exposición a la mitad (por ejemplo, cambiar la apertura del diafragma de f/5.6 a f/8).. 1.7.
(17) Enseguida se reproduce la tabla de valores de I. para una latitud de 20º norte correspondiente a la Cd. de México. Medio Día Mes 10 2/3 Junio 10 2/3 Julio Mayo 10 2/3 Agosto Abril 10 2/3 Sept. 10 2/3 Marzo Octubre Febrero 10 2/3 Nov. 10 2/3 Enero Dic. Tabla 1.1 Valores. 11 am 1 pm. 10 am 2pm. 9am 3pm. 8am 4pm. 7 am 5 pm. 6am 6pm. 10 2/3 10 2/3 10 2/3. 10 2/3 10 2/3 10 2/3. 10 2/3 10 2/3 10 2/3. 10 1/3 10 1/3 101/3. 10 1/3 10 1/3 10. 9 9 7 2/3. 10 2/3. 10 2/3. 10 2/3. 10 1/3. 10. 10 2/3. 10 2/3. 10 2/3. 10 1/3. 9 1/3. 10 2/3. 10 2/3. 10 1/3. 10 1/3. 9. 10 2/3. 10 2/3. 10 1/3. 10. 8 1/3. de luz incidente (l.) para una latitud 20º norte y sur. 2 Se considera la compensación debido a la dirección de la luz. Cuando la luz incide en el sujeto directamente se dice que el ángulo entre la cámara y ~l sol es de Oº. En este caso no se requiere compensación; sin embargo al cambiar el ángulo de incidencia se requerirá de mayor exposición, como se indica en la tabla 1.2.. Angulo Sol brillante Sol con bruma Oº +1/3 35º +1/3 +2/3 70º +2/3 +1 90º +1 1/3 +1 120º +1 1/3 +1 2/3 150º +1 2/3 +2 180º +2 +2 1/3 Tabla 1.2 Incremento de exposición por ángulo de incidencia. 3 Condiciones del cielo. La luz que llega al sol se ve disminuida por las condiciones atmosféricas. La tabla siguiente muestra la compensación requerida para varias situaciones del cielo.. 1.8.
(18) Capa delgada de nubes + 1 2/3 Nuboso brillante +2 2/3 Neblina densa +3 2/3 A la sombra en día claro +3 2/3 Tabla 1.3 Incremento de exposición debido a las condiciones del cielo 4 Tono del sujeto. Si el sujeto está obscuro se debe incrementar la exposición de + 1/3 a+ 2/3. En caso de que el motivo principal esté claro se debe decrementar la exposición de -1/3 a -2/3. 5 El entorno también afecta a la exposición. Para un entorno obscuro se debe incrementar de + 1/3 a+ 2/3 de paso la exposición. Si el entorno es claro, debe disminuirse la exposición de -1/3 a -2/3. 6 Bruma aérea. Conforme aumenta la altura la radiación ultravioleta y la luz de longitud de onda corta se incrementan. A una altitud de 900 a 3000 m. se recomienda un decremento entre -1/3 y -1 paso de exposición. Arriba de los 3000 m. se debe decrementar la exposición de -2/3 a -1 1/3 pasos. El análisis de 75 imágenes empleando este método, se encuentra en el apéndice A.. 1.5 Sistema aritmético de unidades de exposición La ANSI [7] indica la nomenclatura y las fórmulas de los parámetros de exposición, esto incluye el sistema aritmético de unidades de exposición que a continuación se describe. La ecuación matemática que relaciona los parámetros de exposición5 es: (1.1). Donde: Ev es el valor de exposición A es la apertura del diafragma T es la velocidad de obturación, en segundos I es la iluminación en pies-candela (1 pie-candela = 10. 76 luxes) S es la sensibilidad de la película (ASA, ISO) C es la constante de exposición para luz incidente; tiene un valor de 20.83. 5. En la norma PH3.49-1971 se expresa el primer ténnino de la igualdad (1.1) como. 2E •. Esto es un error porque la relación que. existe entre los parámetros fotográficos es de tipo exponencial base 2 y no de tipo lineal.. 1.9.
(19) Despejando Ev de la ecuación (1.1), se tiene:. /~~:: )s]. Ev = lofJ. = log(z24J:308. log2. J. (1.2). log2. Otras relaciones útiles son: 2. 1 = (10.76) A C TS. 1. =224.1308~. (1.3). = (Io.? 6)2E, e= (224.Bos)2E,.. (1.4). TS. s. s. Donde la luminancia se puede obtener en función de la apertura del diafragma, la velocidad de obturación y sensibilidad de la película (ecuación (1.3)), o en función del valor de exposión y la sensibilidad de la película (ecuación (1.4)). En las ecuaciones (1.2), (1.3) y (1.4), la luminancia (1) se expresa en luxes. Los valores que pueden tomar A, T y S se presentan en la tabla siguiente.. Velocidad de obturación Redondeado Preciso 1 1. Apertura de diafragma Redondeado Preciso 1 1. Sensibilidad de película Redondeado Preciso 3 4/ifi. 1/2. 1/2. 1.4. ..fi.. 6. s/ifi. 1/4. 1/4. 2. 2. 12. 16/ifi. '._. dJf!<. ,/ ;,. -. 1/15 1/30 1/60 1/125 1/250 1/500 1/1000 1/2000 1/4000. "'. 1/16 1/32 1/64 1/128 1/256 1/512 1/1024 1/2048 1/8192. . -. 4 5.6 8. "'"-. .. ¿,. l_" \¡ .,,.. 4. • ~. l ' .... -. 50 100 200 400 800 1600 3200 6400 12500. 32V4 4..fi. 64V4 8 128V4 11 g..fi. 256V4 16 16 512V4 22 1024V4 16.J2 32 32 2048V4 45 32.J2 4096V4 64 64 8192V4 Tabla 1.4 Valores redondeados y precisos de los parámetros fotográficos T, A y S Los valores que aparecen en la columna de "redondeado" es un conjunto de números fáciles de recordar. Sin embargo, para fines de diseño debe emplearse una progresión geométrica de potencias de 2 a partir de la línea sombreada de la Tabla 1.4. Para. 1.10.
(20) obtener divisiones intermedias se emplea. Ji. en los valores de velocidad de obturación. y apertura de diafragma; en el caso de la sensibilidad de la película se emplea. V2.. 1.6 Niveles de luminancia para escenas de tipo paisaje y latitud de una película Para tener una idea del rango de luminancia que presenta una escena de tipo paisaje y el rango de sensibilidad de una película fotográfica, se presenta el análisis siguiente. Una escena del tipo paisaje tiene características muy particulares. Presenta un gran número de zonas con alto contraste y por lo regular la escena se divide en dos partes, la mitad inferior tiene objetos diversos y la mitad superior presenta luminosidad uniforme (cielo, por ejemplo); se requiere de gran profundidad de campo (aperturas de diafragma pequeñas); en general son situaciones a plena luz del día en espacios abiertos. El contraste de una escena es el rango de luminancia determinado por las porciones más claras y las más obscuras. En promedio una escena al aire libre típica tiene un rango de 7 pasos de exposición [6]. De la tabla 1. 1 se puede ver que a las 12 hrs. , durante todo el año se tiene una iluminación de: (1.5). Considerando este valor I. (ecuación 1.5) y el rango de 7 pasos descritos anteriormente, se puede decir que el rango de iluminación va de 3 % a 1O% de valores de iluminación. Su equivalente en luxes se encuentra dado por la relación (1.6). (1.6) Con I en pie-candela. Despejando I se tiene la ecuación (1.7). 1 = 67.24antilog(!v/3.32). (1.7). Donde I está en luxes. Empleando esta relación de conversión se tiene que el rango de luxes que tiene una escena de tipo paisaje, va de 853 luxes a 109298 luxes aproximadamente. Como un dato adicional, se debe mencionar que la iluminación máxima en una situación de luz de día (sol a 90º de altitud y luz del cielo - reflexiones por nubes-) es de 118360 luxes[4]. La latitud de una película es el rango de sensibilidad que tiene. Una película de color tiene una latitud de 5 pasos de exposición[6], 1 paso de subexposición y 4 de 1.11.
(21) sobreexposición. La latitud de una película de color común con sensibilidad de ASA 100 tiene un rango que va de los 4518 luxes a los 144582 luxes aproximadamente. Una forma de cálcular este rango es usando la "regla f/16" para un día soleado, empleando una apertura de f/ 16 y una velocidad de obturación de 1/ 125. La condición de subexposición se presenta con f/22 y la de sobrexposición con f/4. Comparado ambos rangos se aprecia que la latitud de la película con la exposición propuesta, no podrá registrar adecuadamente los eventos que tengan una luminancia entre 853 luxes y 4518 luxes. Esto indica que se requiere de una corrección en la exposición. Las limitaciones físicas son claras, tanto en la película fotográfica como en la cámara. Las combinaciones posibles de los parámetros fotográficos están limitadas por la luminancia de la escena. Por tanto sólo mediante mediciones de diferentes partes de la escena y con experiencia se puede obtener una fotografía bien expuesta.. 1.12.
(22) 1. 7 Bibliografía [1] Nuevo diccionario ilustrado Sopena de la lengua española. Ramón Sopena S.A. 1972 [2] Garret, John El arte de la fotografía en blanco y negro Herman Blume Ediciones TR164.G62218 1991 [3] Popular Photograpy. Volume 58, No.5 May 1994. Pags. 40-51, 116 y 142 [4] ANSI PH2.7-1986 American N ational Standard for Photogrphy - Photogrphic Exposure Guide [5] ANSI PH2.5-1979 American N ational Standard Method for Determining Speed of Photographic Negative Materials (Monochrome, Continuous-Tone). [6] ANSI/ISO 2240-1982 ANSI PH2.21-1983 American National Standard for phoography (sensitometry) color reversa! camera films determination ISO speed. [7] ANSI PH3.49-1971 American N ational Standard for general purpose photographic exposure meters (photoelectric type).. 1.13.
(23) 2 Reconocimiento de patrones En el capítulo anterior se plantea la solución al problema de la exposición fotográfica desde el punto de vista del fotógrafo. Y se comenta que el empleo de estándares, instrumentos de medición y la experiencia permiten encontrar la combinación adecuada para una buena exposición. Es claro que el proceso que sigue un fotógrafo para encontrar la exposición fotográfica de una escena consiste en identificar las características especiales que tiene, la relación del sujeto principal con su entorno y la luminancia recibida de los objetos que están en la escena. Al considerar estas variables el fotógrafo podrá reconocer cual es la combinación conveniente de apertura de diafragma y velocidad de obturación, para exponer adecuadamente la película. Un sistema artificial puede realizar una función similar mediante técnicas de reconocimiento de patrones. La aplicación de la técnica depende directamente del problema y las características· deseables de la solución. En este capítulo se habla de los pasos que se tienen que seguir para el diseño de un sistema de reconocimiento de patrones, algunas técnicas de procesamiento digital de imágenes para el tratamiento de información y las redes neuronales como clasificador.. 2.1 Sistema de reconocimiento de patrones Un sistema de reconocimiento de patrones es aquel sistema que es capaz de discernir a que clase pertenece un objeto dentro de un conjunto de clases. El proceso que se sigue para hacer esta identificación se hace en tres etapas[l]. La primera etapa consiste en traducir las características físicas a datos útiles mediante el empleo de un transductor. Más adelante se hablará del "Carged Coupled Device" (CCD) que es un dispositivo capaz de transformar el flujo luminoso a niveles de voltaje que a su vez se pueden convertir a un dato digital. La organización de la información digital es fundamental tanto para su almacenamiento como para la interpretación de los datos; en otra sección se hablará del formato "Microsoft Windows Bitmap" (BMP) que fue el empleado en este trabajo.. En la segunda etapa se extraen las características principales que representan el evento. Mediante filtros y procesos heurísticos es posible obtener un conjunto de datos que caractericen el fenómeno. En el caso de una imagen la frecuencia con que se presentan los niveles de luminancia, los contornos, los segmentos que tiene y combinaciones de éstos, pueden ser elementos válidos para representarla.. 2.1.
(24) En la última etapa se procede a reconocer a que clase pertenece la muestra presentada a la entrada del sistema. Existen diferentes técnicas de reconocimiento de patrones; en general para el diseño de un sistema de esta índole Castleman[2] propone los pasos siguientes: 1. Diseño de localizador de regiones. Se selecciona el algoritmo que aislará las regiones de la imagen. 2. Selección de características. Se decide que propiedades distinguen a las diferentes regiones. 3. Diseño del clasificador. Se establece la base matemática del algoritmo de clasificación y se selecciona la estructura del clasificador. 4. Entrenamiento del clasificador. Fijar los parámetros del clasificador para que coincidan con los objetos a clasificar.. 5. Evaluación del desarrollo. Se estiman los valores deseados y los posibles errores de clasificación. Estas etapas de diseño se desarrollarán en el capítulo siguiente. Enseguida se dan los elementos que sirven de base para la elaboración del sistema.. 2.2 Dispositivo de carga acoplada (CCD) El concepto de dispositivo de carga acoplada (Carged Coupled Device o CCD) surge en 1970 [3]. Y desde entonces ha tenido aplicaciones en: filtros, multiplexores, memorias [4] y sensores de imagen [5]. En la aplicación de sensores de imágenes su uso se encuentra en la astronomía, fotografía, video, cámaras de seguridad, sistemas de visión y endoscopía. Los CCD's son circuitos integrados hechos con semiconductor; y tienen la capacidad de almacenar energía en "pozos de potencial" 1• Estos pozos son áreas pequeñas del dispositivo donde se acumula la energía que llega en forma de luz (radiación visible). Si se forma una matriz de pozos de potencial se estará en posibilidad de construir una imagen. El número de pozos o pixeles determinarán la resolución del dispositivo. En nuestro caso el tamaño de la imagen es de suma importancia; pues se relaciona directamente con el tiempo de procesamiento que se requiere - con una imagen más grande se requerirá de más tiempo -. Como referencia consideramos el CCD modelo TC211 [2], manufacturado por Texas Instruments, para definir las dimensiones de las imágenes que empleamos. Es un circuito de 6 terminales, con una resolución de 192 1 Un "pozo de potencial", es una región en la unión de dos semiconductores donde se ha dado una recombinación de huecos y electrones llegando al equilibrio. A esta región se la llama "región de agotamiento" o "región de carga espacial" (4).. 2.2.
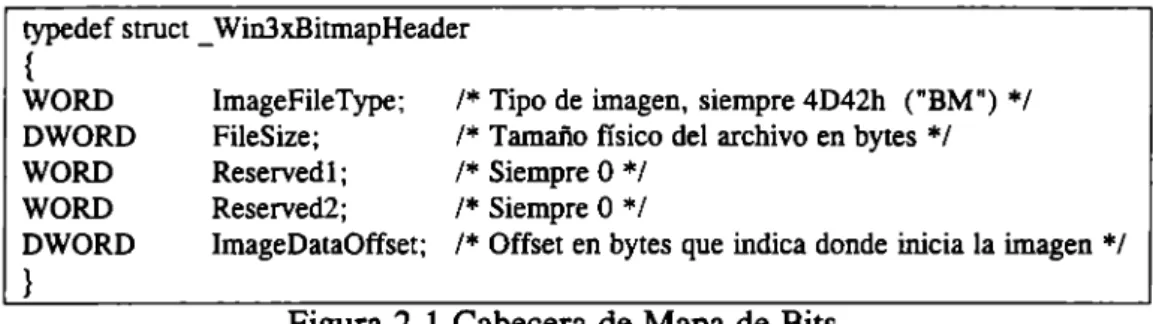
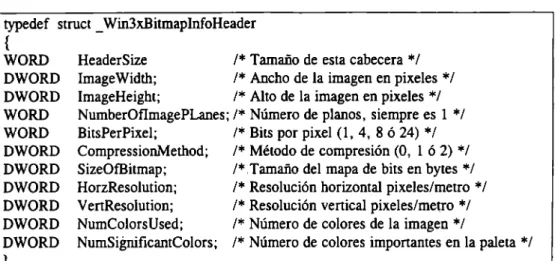
(25) pixeles (horizontal) por 165 líneas (vertical), blanco y negro, y dimensiones de 7 .54 mm de largo, 7.82 mm de alto y 2.5 mm de espesor. Cada pixel mide 13.75 µID (horizontal) por 16 µID (vertical).. 2.3 Formato BMP Una imagen se puede representar en diferentes tipos de formatos dentro de un archivo de computadora. Tal es el caso de formatos como: JPG, GIF, TIFF, BMP, etc. En nuestro caso se decidió emplear el formato BMP[6] (Microsoft Windows Bitmap), por ser un estándar usado ampliamente y no presentar compresión de datos[?] (es importante señalar que durante el desarrollo del presente trabajo no se encontraron archivos comprimidos), aun cuando tiene la capacidad de soportar esta modalidad. Este formato fue diseñado por Microsoft para su programa "Microsoft Windows"; posteriormente, junto con IBM, han desarrollado versiones más recientes para el sistema operativo OS/2. Para determinar que información es útil para nuestra aplicación se analiza la estructura del archivo. Ésta está compuesta de cuatro partes: "Cabecera del Mapa de Bits", "Cabecera de Información", "Paleta" y el "Mapa de Bits".. La Cabecera del Mapa de Bits contiene la clave que indica el tipo de archivo que es (una "BM" al inicio del archivo), el tamaño fisico en bytes del archivo y el offset que señala donde inicia la información de la imagen. En la Figura 2.1 se muestra la estructura correspondiente. typedef struct _ Win3xBitmapHeader { ImageFileType; /* WORD FileSize; /* DWORD /* Reservedl; WORD /* Reserved2; WORD ImageDataOffset; /* DWORD }. Tipo de imagen, siempre 4D42h ("BM") */ Tamaño físico del archivo en bytes */ Sie1npre O*/ Siempre O*/ Offset en bytes que indica donde inicia la imagen */. Figura 2 .1 Cabecera de Mapa de Bits Es necesario resaltar que el tipo "WORD" indica que el tamaño de la variable es de 2 bytes y "DWORD" que la variable es de 4 bytes. La importancia radica en la portabilidad del programa; en nuestro caso el programa corre tanto en una plataforma PowerPC de IBM, como en una computadora personal.. La estructura de la Cabecera el ancho y alto de la imagen en pixeles, si está o no comprimida la imagen, número de colores de la imagen, etc. En la Figura 2.2 se muestra una descripción detallada de esta estructura. Para nuestro trabajo la información más relevante es el ancho y el alto de la imagen.. 2.3.
(26) typedef struct _Win3xBitmaplnfoHeader. { WORD DWORD DWORD WORD WORD DWORD DWORD DWORD DWORD DWORD DWORD }. HeaderSize /* Tamaño de esta cabecera */ ImageWidth; /* Ancho de la imagen en pixeles */ ImageHeight; /* Alto de la imagen en pixeles */ NumberOflmagePLanes; /* Número de planos, siempre es 1 */ BitsPerPixel; /* Bits por pixel (1, 4, 8 ó 24) */ CompressionMethod; /* Método de compresión (O, l ó 2) */ SizeOfBitmap; /* .Tamaño del mapa de bits en bytes */ HorzResolution; /* Resolución horizontal pixeles/metro */ VenResolution; /* Resolución venical pixeles/metro */ NumColorsUsed; /* Número de colores de la imagen*/ NumSignificantColors; /* Número de colores imponantes en la paleta*/. Figura 2.2 Cabecera de Información. La estructura de la Paleta se muestra a continuación. typedef struct _Win3xPalette. { RGBQUAD Palette[ ]; }. /* 2, 16 ó 156 elementos */. Figura 2. 3 Estructura de la Paleta Donde RGBQUAD se define como typedef struct _Win3xRgbQuad { BYTE Blue; /* Componente azul de 8 bits */ BYTE Green; /* Componente verde de 8 bits */ BYTE Red; /* Componente rojo de 8 bits */ /* Valor reservado, siempre O */ BYTE Reserved }. Figura 2.4 Estructura RGBQUAD La estructura anterior (Figura 2.4) indica que el color de un pixel se encuentra definido por el nivel que se tenga de azul, verde y rojo. En nuestra aplicación se cuidan los niveles de luminancia, por tanto sólo se requiere la información monocromática (256 niveles, representados en un 1 byte). Para la conversión de una imagen a colores a una imagen en blanco y negro se puede emplear la relación (2.1)[8] sin perder información.. Escala_ de_ gris= 0.114 * Blue + 0.587 *Green+ 0.299 * Red (2.1). 2.4.
(27) 2.4 Convolución digital Antes de hablar de filtros es necesario comentar sobre la convolución digital[9], que es la herramienta que permitirá la aplicación de los filtros sobre las imágenes. Por definición se dice que si en un sistema lineal se tiene un sistema S que se considera una caja negra, a cuya entrada se le aplica la función f{x,y), a la salida-se tiene h{x,y) = S (f(x,y)). Para nuestro caso la imagen original se representa por f(x,y), S es el filtro y h{x,y) la imagen de salida.. s. f(x,y). h(x,y). Figura 2.5 Sistema lineal Si la salida del sistema cumple con permanecer lineal e invariante con el desplazamiento, entonces el sistema se puede representar como se indica en la expresión (2.2) [2] h(x,y) = f * g. =f. ff(u, v)g(x -u,y- v)dudv. CX). CX). -00. -00. (2.2). Para el caso de una imagen digitalizada se tiene la convolución discreta en dos dimensiones se emplea la expresión (2.3). H(i,j)=F*G=. ¿ m. (2.3). ¿f(m,n)h(i-m,j-n) n. En la figura siguiente se muestra la convolución entre un filtro (máscara) y un fragmento de imagen.. • m3 •m4 • • m5 m6 •m m • • 7 8 m9 ml. • • m2. Máscara. • •. • •. • •. •. •. •. •. • • • •. • • • • • •. •1. •1. 34 Í35. •. •. 33. ~. 1. •i53. • • •. •. 43 i44 ~ 1. • • •. 54. • •. • • •i45 • • 1 55 • • • • • •. .. • •. • •. • • • • • • • • • • • •. Centrado en i 44 la salida y nuevo valor de i 44 seria:. Figura 2.6 Convolución entre un filtro y una imagen. 2.5.
(28) 2.5 Filtros Un filtro es un dispositivo o sistema capaz de retener información particular de un evento cuando los datos se hacen pasar a través del filtro, mientras que el resto de la información permanece sin cambio. Su aplicación es diversa dentro de la ingeniería por ejemplo en la electrónica existen filtros que eliminan los sonidos agudos; en control se tienen filtros para compensar el funcionamiento de un sistema de control; o en el área de procesamiento digital de señales, que es nuestro caso, donde se puede encontrar un contorno. Existen diferentes tipos de filtros como son los filtros pasa bajas, pasa altas, pasa banda y rechaza banda; su función está relacionada con los efectos que tienen sobre el fenómeno. Para clarificar este efecto se pueden estudiar diferentes eventos en función de la frecuencia. La herramienta matemática para encontrar las componentes de frecuencia de un evento que sucede en el transcurso del tiempo es la Transformada de Fourier [10]. Tomando la función constante para representar una región de la imagen sin contrastes y función impulso unitario 8(t) para representar un cambio brusco de contraste se puede explicar la función de un filtro. Inicialmente se analiza la función constante. Donde la Transformada de Fourier de la función constante f(t) = A se representa enseguida F[f(t)] = F[A] = 2m3(ü>). (2.4). Se puede observar que en el dominio de la frecuencia sólo se tendrá una componente de amplitud 21r en la frecuencia m = O. Ahora, la función impulso se define como se muestra en la relación B(t) ={:. si t. -:t:. si t. = O,. O,. Y la Transformada de Fourier de la función impulso se muestra en la siguiente relación. ., F[8(t)] = fa(t)e- 1(1)/dt. =e-1ai1l,=o =1. (2.5). Considerando ambas transformadas (relaciones (2.4) y (2.5) ) se puede afirmar que la función constante f(t) = A no tiene componentes de alta frecuencia, mientras que la función impulso 8(t) presenta estas componentes y en número infinito. En otras palabras un fenómeno que tenga un gran número de componentes en el dominio de la frecuencia, tendrá un comportamiento "abrupto".. 2.6.
(29) Si aplicamos un filtro pasa bajas a la función impulso, se eliminarán componentes de alta frecuencia quedando un evento con características similares a la Transformada de Fourier de la función constante. Por tanto un fenómeno modificado por un filtro pasa bajas presentará un comportamiento más uniforme ("sin brincos"). Ahora si se aplica un filtro pasa altas a una función impulso, el resultado será un evento con componentes de alta frecuencia. Por tanto se resaltarán los cambios de nivel más significativos, pues se están eliminando los cambios "suaves" debidos a las bajas frecuencias. Su aplicación en el procesamiento digital de imágenes es de suma importancia. Un filtro pasa bajas permitirá suavizar una; mientras que un filtro pasa altas resaltará los bordes eliminando los cambios de contraste que no están tan acentuados.. 2.5.1 Filtros pasa bajas. Algunos filtros pasa bajas comunes se mencionan enseguida. Media, consiste en obtener el promedio de los componentes de una ventana. Media ponderada, se promedian los valores de los pixeles dentro de una ventana, donde previamente cada pixel se modificó en función de la distancia a la que está del centro de la ventana. Moda, el pixel central de la ventana se reemplaza por el valor más común dentro de la misma. Mediana, el valor del pixel se sustituye por la mediana de los vecinos que conforman la ventana analizada. K-vecino cercano, en una ventana se toman k valores que están muy cerca del valor central de la ventana, se promedian y este será el nuevo valor del pixel de interés. Comúnmente el número de valores que se toma es de 6, y el tamaño de la ventana de 3x3. Filtro Sigma, es una variante del anterior; en lugar de tomar k valores, ahora se toman aquellos valores que están a cierto número de desviaciones estándar de distancia. Filtros condicionales, se aplica un filtro si la condición se cumple, si no se emplea un filtro distinto al primero. Gaussiana, es un filtro basado en la distribución Gaussiana binomial [11]; matemáticamente se define en la expresión (2.6). \OS30.:Z.. BIBLIOTECA. 11~, J:-:,."\. ¡¡_. ~. í~,;/. / -4. ·----·. t:;~,. -¡,•p•·, ·~, ~~~.r .:)::: ·.~ \.. l ..~ .. J,-· •. 1 "'i. .! :. ~ ... ·,. 2.7.
(30) x2+y2. 1 -p(x,y)=--e 2,,.2. (2.6). s 7r(J'2. En la figura 2. 7 se muestra la distribución Gaussiana binomial.. o.os. 10. -10. Figura 2. 7 Distribución Gaussiana Binomial. Otro grupo de filtros son: filtros basados en valores y gradientes, máxima homogeneidad, cercano a un mínimo y un máximo, etc. [9]. 2.5.2 Filtros pasa altas Operador Gradiente, permite encontrar la pendiente entre pixeles de manera que al encontrar un borde el gradiente inicialmente es cero, después se incrementa hasta llegar a un máximo, enseguida se decrementa y se encuentra la pendiente cero. Laplaciano, con este operador es posible encontrar los puntos de inflexión de una imagen. Mediante la segunda derivada de una función discreta, deducida a partir de la aproximación polinomial por diferencias finitas[l2] y el binomio de Newton, se pueden conocer los máximos y los mínimos de la región analizada.. 2.8.
(31) Operadores de Roberts, Sobel, Prewitt y Kirsch, son un conjunto de máscaras que se aplican en un orden predeterminado para enfatizar la detección de un borde. Filtros condicionales, también existen filtros pasa altas donde bajo ciertas circunstancias se aplica un filtro y en otras se usa un filtro diferente.. 2.5.3 Filtros pasa banda Operador Marr, David Marr[13] propuso una combinación de la Gaussiana y el Laplaciano. De forma que la Gaussiana suaviza la imagen y el Laplaciano detecta los bordes. Matemáticamente el Laplaciano de la Gaussiana (LoG) es:. El LoG normalizado es:. (2.7) Gráficamente se muestra el comportamiento de (2.7) empleando. O'=. 1.6.. 2. 8 Laplaciano de la Gaussiana. 2.9.
(32) En este trabajo se decidió emplear un filtro pasa banda debido a las características que presentan las imágenes; existe en la mayoría de los casos un gran número combinaciones de altos y bajos contrastes haciendo necesario resaltar la información más valiosa para la integración de los contornos.. 2.6 Contornos Una vez que se ha filtrado la imagen, lo que se obtiene es una mejora en cuanto a mayor claridad en los objetos observados, acentuación de bordes o contornos, efectos especiales, etc. Sin embargo, las características propias de la imagen (como el ruido) pueden impedir que un borde esté completo. Esto es importante por que se desea hacer una segmentación en función de los bordes. Existen varios métodos para detectar los contornos[14] que limitan un objeto dentro de una imagen, entre los cuales se pueden mencionar: Ligado de contorno por ajuste de curvas, existen varias formas (polinomio de Bezier, ajuste piezolineal de curva, ajuste poligonal, etc.) de ir ajustando polinomios que vayan uniendo puntos hasta reconstruir el contorno. Métodos heurísticos para ligar contornos, es posible considerar información como el gradiente entre puntos vecinos, ya sea en ventanas de 3x3 o mayores. Ligado de contorno por transformación de Hough, consiste en trasladar el fenómeno del espacio Cartesiano al espacio Polar, de forma que en lugar de tener dos distancias con respecto al origen para ubicar al punto, se tiene a la magnitud y el ángulo para representar al punto. Así los puntos que pertenecen a un contorno específico, en el espacio Polar serán un conjunto de curvas que se intersectan en una coordenada determinada. Ligado de contorno por transformación de Duda-Hart, es una adaptación de la técnica de Hough, donde cada punto diferente de cero se transforma al espacio Polar. Posteriormente se cuantiza este espacio Polar en celdas y se contabiliza el número de elementos que caen dentro de cada celda. Las celdas con un gran número de elementos indicará que los puntos correspondientes a esa celda pueden ser unidos con una línea recta. Para las celdas con un valor bajo, se deduce que los puntos están aislados y pueden ser borrados. Ligado de contorno por transformación de O'Gorman-Clowes, es una propuesta donde se emplea la dirección del gradiante del contorno en lugar del ángulo. Y en lugar de incrementar el valor de la celda de cuantización en uno, se hace en función de la magnitud del gradiente para dar importancia a los contornos fuertes sobre los contornos débiles.. 2.10.
(33) En nuestro caso se decidió emplear directamente los puntos obtenidos por el proceso de filtrado, debido al costo en tiempo que toma aplicar un proceso de construcción de contorno. Además de no ser el objetivo primordial, sino el de obtener los segmentos de la imagen. Este tema se aborda enseguida.. 2.7 Segmentos La segmentación es la culminación del proceso con el cual se podrá representar los componentes de la imagen como entidades independientes. Esto se puede lograr empleando diferentes técnicas; varias de ellas se mencionan a continuación[2].. Segmentación por nivel, consiste en definir rangos de niveles de gris. Para esto existen técnicas como: nivel global, nivel adaptativo y selección óptima de nivel, entre otras. Estos métodos consideran los puntos exteriores e interiores de cada elemento de la imagen.. Segmentación por gradiente, emplea la información obtenida mediante técnicas como el Laplaciano y gradiente de nivel, donde ya se tiene el contorno. Se requiere seguir el contorno para determinar los segmentos de la imagen. Crecimiento de región, se divide la imagen en muchas regiones pequeñas, en cada región se definen computacionalmente las propiedades que indican pertenencia como el nivel de gris, textura o color y se van agregando a la región que sin~e de referencia las regiones circundantes que cumplen con las propiedades ya mencionadas. Para anexar nuevas regiones se analizan los límites de las regiones adyacentes y se determinan cuáles son débiles y cuáles no. Los límites débiles se disuelven y se sigue el proceso hasta contar con la totalidad de bordes fuertes. En nuestro caso se desarrolló una segmentación particular como se verá en el próximo capítulo, donde se consideran los puntos que forman el contorno de las regiones y los rangos de nivel de gris.. 2.8 Selección de Características Para la selección de las características que empleará un sistema de reconocimiento de patrones, Castleman[2] propone que estas características tengan cuatro propiedades.. Discriminación, las características toman valores muy diferentes si los objetos son distintos.. Confiabilidad, las características tendrán valores similares para todos los objetos de la misma clase.. Independencia, las características escogidas no deberán estar relacionadas entre sí.. 2.11.
(34) Números pequeños, es recomendable que el número de características no debe ser grande, el grado de complejidad del sistema puede aumentar grandemente.. En lo particular se consideró que la combinación del grado de luminancia del segmento y el área del segmento y el número de segmentos son elementos suficientes para caracterizar la imagen. Estos elementos cumplen con las características antes mencionadas. Los valores que toman son muy diferentes, un observador común puede hacer la distinción de regiones basado en estos elementos. Así mismo puede agrupar aquellos segmentos que tienen características similares. Es indiscutible la independencia que existe entre el nivel de luminancia y el área del objeto que está reflejando la luz. Y sólo son dos elementos, la combinación de luminancia y área y 5 segmentos por imagen. En el próximo capítulo se sustentará cómo se escogieron estas características.. 2.9 Clasificadores Los métodos empleados en el reconocimiento de patrones se pueden clasificar en tres grandes áreas[l], aquellos que están relacionados con la Teoría de Decisión, la clasificación Estructural/Sintáctica y la clasificación por Mapas Asociativos. En la Teoría de Decisión encontramos los métodos que ocupan herramientas estadísticas como la función de densidad probabilística, donde encontramos clasificadores parámetricos y no paramétricos (en los primeros sólo se tienen algunos elementos de la función de densidad como la media, varianza, etc.; en los segundos no se tiene una representación funcional, de tal manera que se requiere un gran número de muestras para estimar la función de densidad). Dentro de esta categoría también se tienen aquellos métodos que emplean Teoría de Grafos y los sistemas basados en reglas. La clasificación Estructural/Sintáctica se basa en el manejo de cadenas de símbolos obtenidos a partir un alfabeto. Estas cadenas son oraciones que siguen un conjunto de reglas gramaticales. Si los atributos estructurales de un objeto se pueden transformar en una oración perteneciente a una gramática particular, entonces se podrá decir que este objeto pertenece a una clase asociada a una gramática. Como un ejemplo de los métodos que pertenecen a este tipo de clasificación se puede mencionar la Teoría de Autómatas. Los Mapas Asociativos son métodos que hace una transformación no lineal de un fenómeno con N variables (cubo N-dimensional) a una expresión de M variables (cubo M-dimensional). Las redes neuronales y el mapeo difuso son métodos que están dentro de esta categoría. En la Figura 2.9 se puede observar una clasificación de los métodos de reconocimientos de patrones propuesta por Looney[l].. 2.12.
(35) aramétrica No paramétrica Estadística { Estimación Bayesiana Teoría de decisión Teoría de grafos eglas lógicas binarias. Basada en reglas { Reglas lógicas ifusas. Autómata. f. Oeterrninístico. ~stocástico Sintáctica/ Estructural. Redes neuronales. Reconocimiento de patrones. recurrentes Hopfield. Mapas bidireccionales asociativos. Redes neuronales con alimentación hacia adelante. Perceptrones en capas múltiples Redes ligadas funcionales Redes funcionales en base radial. Mapas de características autoorganizables Mapas asociativos. Algoritmos de agrupamiento e-media difusos. Redes auto-organizables. Mapas autoorganizables difusos Teoría de resonancia adaptativa Redes de cuantizaci6n de. vector de aprendizaje Redes híbridas. Redes neuronales probabillsticas Mapas asociativos difusos Redes de cuantizaci6n de vector de aprendizaje difuso. Figura 2.9 Taxonomía de los métodos de reconocimiento de patrones. 2.13.
(36) Una imagen presenta un comportamiento aleatorio donde existen un número infinito de combinaciones de los elementos que la componen. De tal manera que a partir de un conjunto finito de muestras se debe generalizar al universo de posibilidades. Por las razones anteriores se considera que el empleo de una red neuronal es el mejor medio para determinar la exposición fotográfica. Ahora se definirá que tipo de red neuronal es la adecuada para el problema de la exposición fotográfica. Enseguida se da una clasificación de redes neuronales.. 2.9.1 Redes Neuronales La definición de una red neuronal es: "Una red neuronal es una estructura de procesamiento en paralelo de información distribuida consistente en elementos de procesamiento (que posee una memoria local y puede transportar a la salida operaciones de procesamiento de información) interconectados entre sí por canales de señal unidireccionales llamados conexiones. Cada elemento de procesamiento tiene una sola salida que se ramifica en muchas conexiones colaterales como se desee (cada una transporta la misma información - la salida del elemento de procesamiento). La señal de salida del elemento de procesamiento puede ser del tipo matemático que se desee. Todo el procesamiento que se da dentro de cada elemento de procesamiento debe ser completamente local; es decir, sólo debe depender de los valores actuales de las señales de entrada que llegan al elemento de procesamiento a través de las conexiones que lo afectan y los valores almacenados en la memoria local del elemento de procesamiento"[15].. La estructura general que tiene una red neuronal es de N elementos de entrada, X capas ocultas con Yi elementos en cada capa (donde Yi indica que cada capa oculta puede tener diferente número de elementos) y M elementos de salida. Fu[16] propone la siguiente clasificación de redes neuronales, que se basa en la función que realizan.. Clasificación. El objeto es asignado a una categoría entre un número finito de categorías. Las redes neuronales que están dentro de esta clasificación son: perceptron, adaline, madaline, perceptrones multicapa y red de propagación hacia atrás.. Asociación. Existen dos tipos, la Autoasociación que hace la recuperación de un objeto en función del objeto mismo. Y la Heteroasociación que recupera un objeto de un conjunto a partir de otro objeto perteneciente a otro conjunto. Ejemplos de estas redes son las redes Hopfield y las memorias asociativas bidireccionales (BAM).. Optimización. Encuentra la mejor solución, por lo regular minimiza la función de costo. Algunos ejemplos son las redes Hopfield y las máquinas de Boltzmann.. 2.14.
(37) Auto-organizable. Organiza la información recibida, empleando autoaprendizaje. Se tienen a las redes de Kohonen, aprendizaje competitivo y aprendizaje de Hebb.. La determinación de la exposición fotográfica es un proceso de clasificación de la escena, donde se consideran los elementos que la conforman (motivo de la escena, luminancia, entorno, etc.) y se escogen la velocidad de obturación y apertura de diafragma correspondientes a la situación. Dado que es un proceso de clasificación se optó por la red de propagación hacia atrás. 2.9.1.1 Red neuronal de propagación hacia atrás. Una red neuronal de propagación hacia atrás tiene la función de activación 0 1 mostrada enseguida [16].. Donde: F(a) es la función sigmoidal y se define como. J(a)= 1. 1 +e. W1; es el peso que existe en la conexión de la neurona i de la capa anterior y la neurona j de la capa actual.. O; es la salida de la neurona i de la capa anterior.. e1. es el valor de disparo de la neurona actual.. Para la inicialización de los elementos de la red se recomienda poner todos los pesos y valores de disparo en valores aleatorios pequeños. Y el valor de disparo del nodo es el valor negativo del peso de la unidad de polarización, es decir - ¿W1;0; . Una red neuronal para que aprenda se requiere de un proceso de entrenamiento. Que es el proceso donde se modifican los pesos de las conexiones debido a la respuesta que da la red al presentarse los patrones de entrenamiento a su entrada y compararlos con la salida esperada (en un entrenamiento supervisado). Para el entrenamiento de la red neuronal de propagación hacia atrás se mencionarán dos métodos, "propagación hacia atrás estándar" y "propagación hacia atrás con momentum y eliminación de punto plano" .. 2.15.
Figure


+7



Documento similar
Proporcione esta nota de seguridad y las copias de la versión para pacientes junto con el documento Preguntas frecuentes sobre contraindicaciones y
[r]
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
6 Para la pervivencia de la tradición clásica y la mitología en la poesía machadiana, véase: Lasso de la Vega, José, “El mito clásico en la literatura española
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
