Rediseño de una plataforma de tres grados de libertad para adaptarla a un simulador de conducción
73
0
0
Texto completo
(2) AGRADECIMIENTOS Agradezco en primer lugar a mi madre, a mi abuela no solo por el apoyo incondicional que me han brindado sino también por la formación que me dieron desde edades tempranas. Quiero agradecer al Tutor Jorge L. Moya por haberme permitido investigar en el campo y por haberme guiado en el mismo. A Nadia, Osmany y Glendi, que aunque lejos me han apoyado tanto. A José Gutiérrez Bayolo, Ramonín, Rolo, Alexis (El falco), Guillermo, René, Guzmán, el Robe y su familia, a Gilberto, y otros profesores Gracias por dedicarme parte de su tiempo, los conocimientos compartidos y su dedicación. A mis amistades de cinco años, por haberme seguido y soportado hasta hoy. A mis amistades más cercanas Mar, lee, Sisco, Toné, Jima, Neorge, Bravo, Apa, Lore, Cosita, Mi Princesa Mononoke, mi gente de Sagua, Davison, Enrique, Manolo, El Curra y a todos los hermanos del cibermundo vicioso, gracias por los bueno momentos, que son los que al final se extrañan.. “No hay puerta mejor cerrada que la que pueda abrirse”. I I.
(3) Resumen. Resumen Adaptar una tecnología a las necesidades que se presenten es un problema de la actualidad sobre todo en los países que no cuentan con recursos para desarrollar una economía a la par de los países desarrollados. En el siguiente trabajo se realizó un rediseño a un simulador de aviones dada sus características, a un diseño de un simulador de conducción, ajustándose a ciertos criterios y puntos de vista que presentó el cliente. Primeramente se recopiló información sobre el tema de la robótica luego se hizo un estudio de la estructura mecánica de la plataforma de simulación a rediseñar, se subrayaron los criterios de diseños claves y se procedió al rediseño teniendo en cuenta éstos. Se realizó un análisis económico donde se manejaron los costos de adquisición de la plataforma a nivel internacional y se compararon con los costos de construcción de dicha plataforma a nivel nacional, además se realizó un análisis de sostenibilidad destacando la importancia de la utilización de simuladores.. I I.
(4) Indice. Índice INTRODUCCIÓN ................................................................................................................. 1 CAPÍTULO I ......................................................................................................................... 8 1. Marco Teórico............................................................................................................... 8 1.1. Uso de los Robots.................................................................................................. 8 1.1.1. Aplicaciones industriales ................................................................................. 8 1.1.2. Máquina-herramienta ...................................................................................... 9 1.1.3. Aplicaciones médicas .................................................................................... 11 1.1.4. Simuladores................................................................................................... 13 1.1.5. Otras aplicaciones ......................................................................................... 16 1.2 Clasificación, ventajas y desventajas de los robots .............................................. 19 1.2.1. Ventajas de los robots paralelos sobre los tipo serie..................................... 22 1.2.2. Desventajas de los robots paralelos con respecto a los tipo serie ................ 23 1.3. Situación de las plataformas de simulación en Cuba........................................... 23 Conclusiones parciales................................................................................................... 25 CAPÍTULO II ...................................................................................................................... 26 2.1 Arquitecturas de las plataformas........................................................................... 28 2.1.1 Arquitectura de la plataforma original ............................................................. 29 2.1.2 Arquitectura de la plataforma rediseñada ....................................................... 30 2.2 Principales datos de las plataformas..................................................................... 31 2.2.1 Principales datos de la plataforma original ..................................................... 31 2.2.2 Principales datos de la plataforma rediseñada ............................................... 33 2.3 Análisis de las cadenas cinemáticas..................................................................... 33 II II.
(5) Indice 2.3.1 Análisis de las cadenas cinemáticas de la plataforma original ....................... 34 2.3.2 Análisis de las cadenas cinemáticas de la plataforma rediseñada ................. 35 Conclusiones parciales................................................................................................... 37 CAPÍTuLO III...................................................................................................................... 38 3.1. Análisis Económico de la plataforma original. ...................................................... 42 3.2. Análisis económico de la plataforma rediseñada ................................................. 42 3.3. Análisis socio-ambiental de los simuladores. ....................................................... 42 Conclusiones parciales................................................................................................... 45 Conclusiones...................................................................................................................... 46 Recomendaciones.............................................................................................................. 47 Bibliografía ......................................................................................................................... 48 Anexos ............................................................................................................................... 50. III III.
(6) Introducción. INTRODUCCIÓN Desde la época de la revolución industrial ha habido una creciente demanda para mejorar la calidad de los productos y reducir el costo de manufactura al mismo tiempo. De ahí que a principios del siglo XX la compañía Ford Motor introdujo el concepto de producción en masa en el cual los procesos de manufactura eran realizados por máquinas de propósito especial. Este método de producción redujo drásticamente los costos de producción permitiendo que ciertos productos fueran accesibles al público en general. Así mismo, fue posible atender la gran demanda de productos de calidad. Sin embargo, dado que una máquina de propósito especial era diseñada para ejecutar una tarea específica, cada vez que surgía la necesidad de un cambio en la línea de producción era necesario reemplazar dicha máquina. Esta inflexibilidad aunada al alto costo de actualización propició el empleo de robots en las tareas de automatización debido a su reprogramabilidad y pronto su uso se extendió a otras áreas donde el uso de personas es impráctico o indeseable, como la exploración submarina y planetaria, la reparación de satélites, el tratamiento de dispositivos explosivos o el trabajo en ambientes radioactivos. Actualmente la robótica también ha encontrado aplicación en muchas otras áreas como ambientes de simulación de vuelo o marítimos, dispositivos apuntadores, medicina y muchas otras [1]. "La palabra "robot" viene del vocablo checo robota, "trabajo", especialmente los llamados trabajadores alquilados" que vivieron en el Imperio Austrohúngaro hasta 1848. El término fue utilizado por primera vez por Karel Čapek [2] en su obra teatral R.U.R. (Rossum's Universal Robots) escrita en colaboración con su hermano Josef en 1920. Desde entonces, dicho término ha sido aplicado a gran variedad de dispositivos mecánicos, los cuales operaran con cierto grado de autonomía, usualmente bajo un cierto control. Dichos dispositivos, aunque distantes de los robots de la ciencia ficción, son sin embargo sistemas electro-mecánicos extremadamente complejos cuya descripción analítica requiere métodos avanzados, que presentan muchos retos e interesantes tópicos de investigación. Hacia 1942, Isaac Asimov da una versión más humanizada a través de su conocida serie de relatos, en los que introduce por primera vez el término robótica con el sentido de. 1.
(7) Introducción disciplina científica encargada de construir y programar robots. Además, este autor plantea que las acciones que desarrolla un robot deben ser dirigidas por una serie de reglas morales, llamadas las Tres leyes de la robótica, posteriormente ampliadas a cuatro tras la introducción de la Ley Cero [4]. ANTECEDENTES Según I.A. Bonev [3] el orden cronológico en que fueron apareciendo los robots paralelos es el siguiente:. Figura 1. El mecanismo esférico propuesta en 1928 por JE Gwinnet. Bonev [3]. Lo que llamaremos sin mecanismo esférico un servicio utilizado como una plataforma para una sala de cine. Por la información existente, esta plataforma no llegó a construirse. (Figura 1). En 1942 W.L.V. Pollard [3] patentó un robot paralelo (Position-Controlling Apparatus) para pintar automóviles. Fig. 2. Al parecer, este robot tampoco llegó a construirse.. Figura. 2: Robot paralelo patentado por W.L.V. Pollard. 2.
(8) Introducción En 1947 V.E. Gough ideó un robot paralelo con seis actuadores lineales formando una estructura de octaedro, Fig. 3. Este robot con seis grados de libertad fue utilizado en la empresa Dunlop para el ensayo de neumáticos de aviación. Esta estructura de robot paralelo presentada en un congreso de FISITA en 1962 [4] es la que ha tenido mayor éxito. En la actualidad, injustamente, muchos autores le denominan plataforma de Stewart cuando se le debería conocer como plataforma de Gough.. Figura. 3: Robot paralelo ideado por V.E. Gough. (a) Primer prototipo. (b) Configuración actual.. V.E. Gough en la presentación de su invento, citaba la existencia de unas mesas (MAST, Multi-Axis Simulation Table) anteriores a su invento. Estas mesas están accionadas por seis actuadores lineales, tres verticales y tres horizontales, Figura. 4.. Figura. 4: MAST, Multi-Axis Simulation Table.. En 1965 D. Stewart [6] presentó una plataforma con seis grados de libertad para ser utilizada como simulador de vuelo, (Figura 5).. 3.
(9) Introducción. Figura. 5: Plataforma de Stewart.. En 1967 K.L. Cappel [7] patentó un simulador de vuelo utilizando la misma estructura que la plataforma de Gough, (Figura 6).. Fig. 6: Simulador de vuelo patentado por K.L. Cappel.. En realidad todos los autores enumerados hasta aquí se pueden considerar pioneros ya que desarrollaron sus inventos sin conocimiento previo de los anteriores. Como pionero también se puede considerar el manipulador paralelo 6-RUS con seis grados de libertad accionado por actuadores giratorios presentado por K.H. Hunt [6] en 1983, (Figura. 7).. 4.
(10) Introducción. Fig. 7: Manipulador paralelo 6-RUS propuesto por K.H. Hunt.. En la actualidad los robots se han extendido a casi todas las esferas de la vida cotidiana del hombre, desde la producción en las industrias hasta el ocio, donde cada diseño tiene un propósito en específico y cada uno de ellos es especial ya sea por sus características constructivas o por su uso, teniendo gran relevancia en la industria, la medicina, el ocio, el deporte, la simulación la que se ha estado desarrollando cada vez más en todo el mundo, y aunque los robots series dominan el mercado, parece por el desarrollo tardío de los robots paralelos, estos últimos son un campo bien interesante por su diversidad en los diseños, características y aplicaciones. Desde 1965 cuando D. Stewart presentó su simulador de vuelo hasta la actualidad las plataformas de simulación han sido uno de los campos más importantes y difundidos de los robots, donde todavía se sigue estudiando y perfeccionando alguno de los diseños que los pioneros de la robótica nos legaron. El trabajo que se desarrolla a continuación se basa en el rediseño de una plataforma de simulación de tres grados de libertad garantizando las necesidades especificadas por el cliente, ya que la plataforma existente presenta una serie de características tanto constructivas como de movilidad no deseada para las prestaciones que quiere la empresa. Para el rediseño de esta plataforma de simulación, el cliente presentó algunos puntos de vista, que quería mejorar de la plataforma ya existente, para el tipo de prestación que quería brindar, lo cual introduce una problemática científica que se abordará a continuación.. 5.
(11) Introducción Problema científico Existen problemas mecánicos, de diseño y constructivos que afectan el funcionamiento de la plataforma existente, se hace necesario su rediseño a fin de mejorar las prestaciones que brindará la plataforma.. Objetivo general Rediseñar para la industria nacional una plataforma de simulación que satisfaga las prestaciones mecánicas exigidas, utilizando softwares profesionales. Objetivos específicos •. Caracterizar el estado del arte sobre el diseño de plataformas.. •. Estudiar detalladamente el diseño original y rediseñar la plataforma de simulación según los puntos de vista y las exigencias del cliente utilizando el software Mechanical Desktop 2002.. •. Validar el rediseño con el software Solid Work 2009, realizándole pruebas mecánicas simuladas.. •. Realizar un análisis de sostenibilidad de la plataforma original y compararlo con el rediseñado.. Hipótesis Si se realiza un rediseño a la plataforma existente se puede mejorar algunas de sus características, y de esta forma satisfacer las necesidades del cliente. Tarea técnica • Buscar información relacionada con los diferentes diseños de robots en el mundo, y aplicaciones de éstos. • Caracterizar los diferentes tipos de robots, ver sus ventajas y desventajas.. 6.
(12) Introducción • Buscar información sobre la explotación de plataformas de simulación en Cuba. • Analizar detalladamente la arquitectura de la plataforma original y según los criterios, además de las exigencias del cliente realizar el rediseño. • Analizar las cadenas cinemáticas de ambos diseños y compararlas. • Comparar los datos técnicos de cada plataforma. • Realizar un análisis económico de la plataforma original y compararlo con la rediseñada. • Realizar un análisis de sostenibilidad en la utilización de los simuladores.. 7.
(13) Capítulo I. CAPÍTULO I 1. Marco Teórico Los sistemas mecánicos que permiten que un cuerpo rígido (aquí llamado efector) para moverse con respecto a una base fija, desempeñan un papel muy importante en numerosas aplicaciones. Un cuerpo rígido en el espacio se puede mover en varias formas, en traslación o movimiento de rotación, estos se llaman sus grados de libertad. El número total de grados de libertad de un cuerpo rígido en el espacio no puede exceder 6 (por ejemplo, tres movimientos de traslación a lo largo de ejes ortogonales entre sí, y tres movimientos de rotación alrededor de estos ejes). La posición y la orientación del efector puede ser descrito por sus coordenadas generalizadas, por lo general son las coordenadas de un determinado punto del efector y los ángulos que definen su orientación, pero puede que cualquier otro conjunto de parámetros que permite definir la postura única del efector. Tan pronto como es posible controlar varios grados de la libertad de los efectores a través de un sistema mecánico, este sistema puede ser llamado un robot. [5] 1.1. Uso de los Robots Históricamente, las estructuras robóticas paralelas se han diseñado primero para el montaje de tareas. Numerosas demostraciones en la viabilidad de ensambles (con o sin fuerza de retroalimentación) han sido realizadas por Pierrot, Reboulet y otros. Hasta la actualidad los campos de aplicación de los robots siguen creciendo abarcando casi todas las esferas de desempeño del hombre. 1.1.1. Aplicaciones industriales Hay que reconocer que el montaje es ningún modo el mayor campo de aplicación industrial para estructuras paralelas (aunque se puede pensar que el montaje puede llegar a ser importante para el desarrollo en el ensamblaje de grandes componentes aeroespaciales). Vamos a presentar aquí dominios industriales en los que paralelamente estructuras de juego, van a jugar un papel importante. [5]. 8.
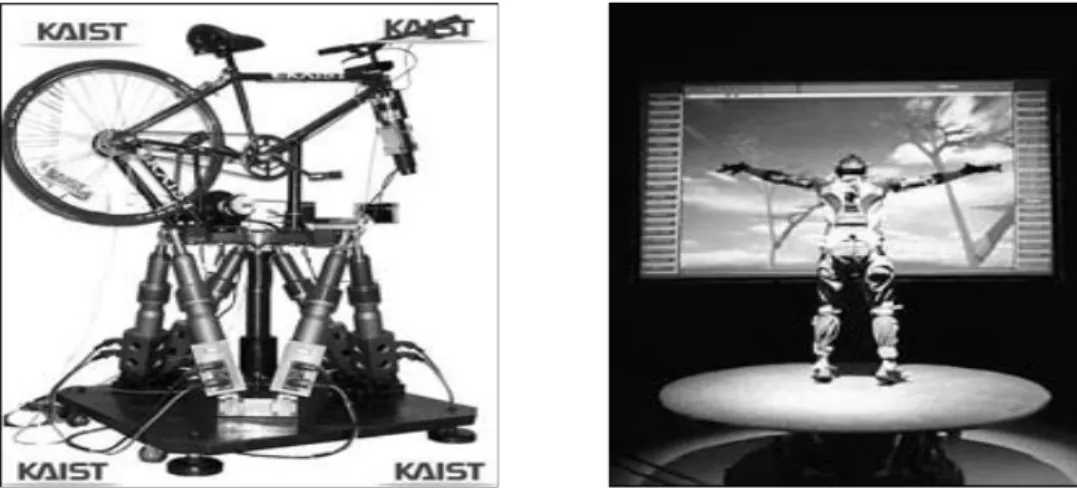
(14) Capítulo I. Figura 8. A la izquierda, un simulador de bicicleta (KAIST). A la derecha, Caren, plataforma de movimiento utilizado para entrenamiento deportivo y la rehabilitación médica (de Motek).. 1.1.2. Máquina-herramienta Entre las aplicaciones de la robótica el que puede tener el más grande impacto económico se encuentra en máquinas-herramienta. La fresadora se presentó por la empresa Giddings & Levis (ahora parte de Thyssen Krupp) en la feria IMTS de máquinas-herramienta en Chicago en 1994, era el principal atracción, bajo el nombre Variax (figura 9). Se basaba en el principio de la plataforma Gough, de esta manera lograr la visión de los revisores de papel de Stewart. Según su fabricante, a pesar de que la máquina posee 6 grados de libertad, fue 5 veces más rígido que una máquina clásica y tenía una velocidad mucho más avanzada y superior.. Figura 9. La Variax de Gidding & Lewis, la primera máquina industrial de fresado paralelo presentado en 1994 en IMTS. 9.
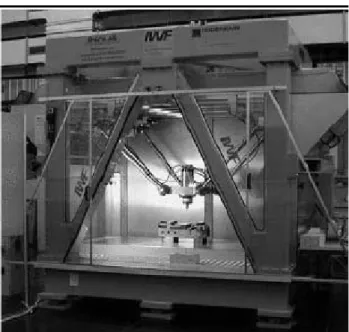
(15) Capítulo I. Figura 10. El robot Hexaglide de 'Ecole Polytechnique F'ed'erale de Zürich, y su aplicación como una máquina-herramienta.. Figura 11. El robot Delta en este caso se utiliza para el embalaje en la industria alimentaria (por Demaurex y Robótica SIG). 10.
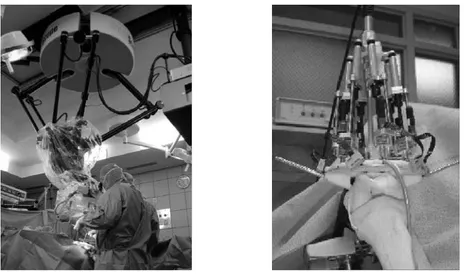
(16) Capítulo I. Figura 12. A la izquierda, un dispositivo de prueba para el vuelo por Schönherr (1990). A la derecha, un banco de pruebas de neumáticos (FCS).. 1.1.3. Aplicaciones médicas Los robots van entrando lentamente en el campo de la medicina con sistemas tales como el DaVinci (Intuitive Surgical) o Zeus (Computer Motion) robots. Las estructuras paralelas juegan también un papel en esta evolución y su uso potencial se mencionó desde el principio. Por ejemplo, en el sistema Crigos de Brandt un robot paralelo fue utilizado para las operaciones de cirugía ortopédica, mientras que las muñecas activas INRIA han sido empleadas con éxito para las operaciones de cirugía oftalmológica en los perros, pero en cuanto a su contraparte de robots serie no muchos de los prototipos de laboratorios han encontrado su camino en el campo. En el sistema SurgiScope proporcionada por ISIS Robotics_ ISIS, un tipo Delta robot se utiliza como soporte del microscopio (figura 13). Otro ejemplo aborda una dificultad para el robot quirúrgico que consiste en seguir el movimiento del paciente. Esto ha motivado el desarrollo de la MARS robot que tiene una estructura 6-UPS: el robot está directamente montado sobre estructura ósea del paciente cerca de la zona quirúrgica. Este robot se ha utilizado como una herramienta quirúrgica para guiar la colocación de tornillos pediculares espinal, y se vende por Mazor_ MAZ como el robot Spine Assist. Un robot similar para arthroplastry de rodilla, el MBARS (Mini sistema robótico Bone-Attached) está. 11.
(17) Capítulo I siendo desarrollado en CMU_ CMU. El Spine Assist y MBARS puede indicar una tendencia hacia otro enfoque a la robótica quirúrgica, basado en una tecnología pequeña, adaptable y relativamente de bajo costo, en comparación con grande y caras estructuras en escala (véase, por ejemplo, el robot quirúrgico Romed propuesto por la IPA Fraunhofer, la figura 14, para el mismo propósito).[5]. Figura 13. A la izquierda, es el ISIS / SurgiScope sistema utilizando un robot Delta como soporte de microscopio (aquí en el hospital Val de Grace de París, ISIS). A la derecha, es La CMU MBARS (Mini sistema robótico Bone-Attached). Figura 14. A la izquierda, el robot Romed propuesta quirúrgica por la API de Fraunhofer. A la derecha, el HexaPOD de 6 d.o.f. camilla de tratamiento robótica para el posicionamiento del paciente durante la terapia de radiación (de Medical Intelligence MI) con una orientación ± 3 grados, capacidad, ± 30 mm de movimiento de traslación, una resolución de 0,1 mm y una carga de 185 kg.. 12.
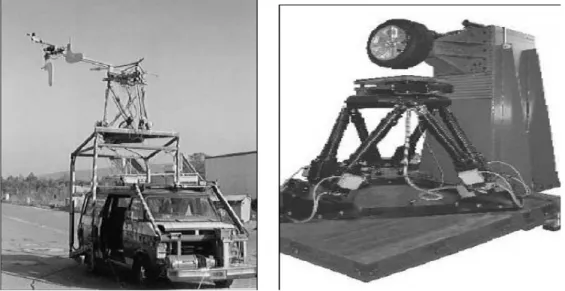
(18) Capítulo I 1.1.4. Simuladores Después de la propuesta inicial de Stewart, se han producido numerosos avances de robots paralelos para simuladores de vuelo [5]. Hoy en día, muchas empresas están construyendo simuladores con movimiento en realidad virtual, no sólo para las aeronaves sino también para los buques, trenes, camiones (driving_ INRT); este sector es probablemente uno en el que las estructuras paralelas son los más exitosas. Podemos mencionar CAE (Canadá) _ CAE, Thal `s (Francia) _ TH, Frasca (EE.UU.) _ FRA. Un ejemplo de simulador se presenta en la fotografía 15. El simulador de conducción más grande de National Advanced Driving Simulator (NADS) en la Universidad de Iowa (figura 16) _ NADS. Un manipulador paralelo impresionante, la Torreta de movimiento basado Simulador (TMBS) fue construido por el Centro del Ejército de EE.UU. para los tanques de Investigación (TACOM) _ TMB. Los actuadores son hidráulicos, la capacidad de carga es de 27 toneladas, con aceleraciones verticales de unos 4-6 g. El objetivo es probar la ergonomía del interior del tanque, y para estudiar los sistemas de estabilización del brazo (Figura 17). Un simulador de sorprendente es Persival, inicialmente desarrollado por el francés 'Ecole Nationale d'quitation'E (figura 17): su objetivo es dar a los jinetes novatos una formación previa, sin poner en peligro la educación en un buen caballo, y es ahora comercialmente asequible.. Figura 15. El simulador de Airbus A340 (realización THOMSON-CSF.).. 13.
(19) Capítulo I. Figura 16. El simulador de conducción NADS en la universidad de Iowa. Figura 17. A la izquierda, Simulador basado en la Torreta de movimiento de un TACOM del Ejército de los EE.UU. A la derecha, el simulador de caballos Persival de la "Ecole Nationale d''Equitación, construido en colaboración con ENAC (E.N.E.).. 14.
(20) Capítulo I. Figura 18. Los primeros simuladores. A la izquierda La Cruz de Hierro (1956) montado en un universal conjunta cuyo movimiento se controla a través de 6 inyectores de nitrógeno. A la derecha simulador de La Luna rendez-vous (1962) con 2 d.o.f. (NASA). Figura 19. Una foto en la patente de K. Cappel (Cappel K.L. invención y desarrollo del sistema de movimiento sinérgico. Enero de 1999). 15.
(21) Capítulo I. Figura 20. El robot de alambre SACSO para probar un modelo de avión en un túnel de viento (Onera).. 1.1.5. Otras aplicaciones Los robots paralelos están en uso en muchos dominios de aplicación diferentes, y nosotros ahora presentamos algunos ejemplos, sin pretender ser exhaustivos. Mucho trabajo de investigación se ha dedicado a la utilización de estructuras paralelas como dispositivos hápticos o joysticks. La alta precisión, y la fuerza sensitiva son ventajas de tales aplicaciones, mientras que el menor espacio de trabajo en comparación con el de serie. es una desventaja en dispositivos. hápticos. Un ejemplo de tal dispositivo, La OM de Omega_ Forcedimension, basado en un robot Delta, se presenta en la figura 21. Una original aplicación es el ascensor de Hydro, que se utiliza para la instalación de el tren de aterrizaje principal del ELG A380_ Airbus. En la industria del ocio, numerosas estructuras paralelas se usan para el movimiento simuladores de paseo. Muchas compañías están ofreciendo ese tipo de bases de movimiento en diversas dimensiones, y el dominio se trata de una de las más exitosas de estructuras paralelas. Mencionamos al grupo que ha diseñado simuladores de los estudios Disney-MGM Star Tour (figura 22), el vuelo AF-Avionics_, Servos simulación_ SMB (figura 23), Virtogo_ VMP con una plataforma de movimiento neumático. Muchos de ellos son. 16.
(22) Capítulo I basados en Moog_ MO o Rexroth_ REX bases de movimiento Hydraudine, eléctrica o hidráulicas, algunas de ellas con cargas nominales más de 10 toneladas. [5]. Figura 21. A la izquierda, la Omega, un dispositivo háptico de 3 g.d.l. basado en la estructura Delta (Forcedimension). A la derecha, un ascensor para el tren de aterrizaje de la Airbus A-380 ( HydroGer atbau ¨). Figura 22. A la izquierda, la plataforma de movimiento los siete pasajeros StarGazer. A la derecha, los estudios Disney-MGM Star Tours plataforma de movimiento instalados en 1987 (AI Group_ AI). 17.
(23) Capítulo I. Figura 23. A la izquierda, la versión del robot Hexa. A la derecha, una aplicación del Hexa para una base de entretenimiento simuladora de movimiento (Servos Simulación Inc.).. Figura 24. Un ejemplo de uso de un robot paralelo para el control de la orientación de la antena.(Tenga en cuenta las pequeñas dimensiones de los actuadores en comparación con el plato (de IN-SNEC IS)). 18.
(24) Capítulo I Figura 25. El aislador de vibraciones PH1 y PHEX1 Ingeniería de la CSA (Ingeniería CSA). Figura 26. Un ejemplo interesante es el de la VISS (vibraciones, aislamiento, represión y Sistema de dirección) _ V ISS, desarrollado conjuntamente por La Fuerza Aérea Americana, Honeywell, y JPL Trisys con el fin de aislar a bordo de medición sistemas (ya sea de óptica, láser, etc) del cuerpo de un satélite.. 1.2 Clasificación, ventajas y desventajas de los robots En la literatura, existen diferentes clasificaciones para los robots. Teniendo en cuenta su estructura cinemática, los mismos se pueden clasificar en: Robots Serie, Robots Paralelos e Híbridos. Los robots tipo serie están formados por una cadena cinemática abierta, con una estructura similar al brazo humano (antropomórficos), Figura 27(a). En cambio, los robots paralelos están formados por cadenas cinemáticas cerradas Figura 1(b). En el caso que aparezca integrado en un mismo robot, ambos tipos de cadenas cinemáticas, se dice que éste es híbrido [7].. 19.
(25) Capítulo I (a). (b). Figura 27 (a) Robot tipo serie. (b) Robot o manipulador tipo paralelo.. Otra clasificación de los robots es la industrial donde: La IFR distingue entre cuatro tipos de robots: •. Robot secuencial.. •. Robot de trayectoria controlable.. •. Robot adaptativo.. •. Robot telemanipulado.. Otra clasificación de los robots según la AFRI •. Tipo A .Manipulador con control manual o telemando.. •. Tipo B .Manipulador automático con ciclos preajustados; regulación mediante fines de. carrera o topes; control por PLC; accionamiento neumático, eléctrico, hidráulico.. •. Tipo C .Robot programable con trayectoria continua o punto a punto. Carece de conocimientos sobre su entorno.. •. Tipo D .Robot capaz de adquirir datos de su entorno, readaptando su tarea en función de éstos.. Otra es la clasificación de robots en generaciones 1. Generación 1- Repite la tarea programada secuencialmente. No toma en cuenta las posibles alteraciones de su entorno. 2. Generación 2- Adquiere información limitada de su entorno y actúa en consecuencia.. 20.
(26) Capítulo I Puede localizar, clasificar (visión) y detectar esfuerzos y adaptar sus movimientos en consecuencia. 3. Generación 3- Su programación se realiza mediante el empleo de un lenguaje Natural. Posee capacidad para la programación automática de tareas. Robots Series Los robots tipo serie se vienen utilizando desde hace varias décadas en múltiples aplicaciones, siendo raro el proceso industrial automatizado en el que no se utilicen. A continuación en la figura 28 presentamos algunas configuraciones más frecuentes de robots industriales tipo serie.[4]. Figura 28. Configuraciones más frecuentes de robots industriales tipo serie [4]. Robots Paralelos Desde sus inicios el hombre ha tenido la posibilidad de manipular objetos con un solo brazo, éstas se ven incrementadas cuando se utilizan los dos brazos simultáneamente. Un levantador de pesas, cuando utiliza los dos brazos, consigue marcas más importantes que la suma de las que conseguiría con cada una de sus brazos individualmente. Como tantos desarrollos tecnológicos, inspirados en la observación de las leyes de la naturaleza, las consideraciones anteriores son las. 21.
(27) Capítulo I que pueden conducir a concebir para los robots el uso de estructuras paralelas, alternativas de las tradicionales en serie, que, por esta cualidad, se denominan paralelos [8], [9]. En los últimos años, uno de los sistemas multicuerpo que ha recibido mayor atención por parte de los investigadores en el área, son los robots paralelos, los que son muy utilizados en la actualidad sobre todo en ciertas aplicaciones industriales, donde es requerido interactuar con grandes cargas. Este tipo de sistemas presenta ventajas importantes respecto a otros sistemas multicuerpo, por su mayor rigidez y relación de tamaño de sus componentes, lo cual le permite una mayor relación tamaño-carga de trabajo [5]. Los trabajos sobre robots paralelos se han enfocado principalmente a la solución del problema cinemático y relativamente pocos trabajos se enfocan en la dinámica de robots paralelos [2]. Según Merlet [5], de manera general los robots paralelos los podemos definir como mecanismos de cadena cinemática cerrada cuyo efector final se une a la base por medio de varias cadenas cinemáticas independientes. Esta definición es muy abierta, e incluye robots con mecanismos redundantes de más actuadores que números de grados de libertad controlados hasta el efector final, tales como manipuladores trabajando en cooperación. De esta forma sólo nos ocuparemos principalmente de manipuladores donde al menos dos cadenas soportan el efector final y cada una de estas cadenas contiene por lo menos un actuador simple, además el número de actuadores es igual que el número de grados de libertad del robot, y la movilidad resulta cero cuando los actuadores son bloqueados. 1.2.1. Ventajas de los robots paralelos sobre los tipo serie •. Un mínimo de dos cadenas permite distribuir la carga en dichas cadenas.. •. El número de actuadores es mínimo.. •. El número de sensores necesarios para el control de lazo-cerrado del mecanismo es mínimo.. 22.
(28) Capítulo I •. Cuando los actuadores se bloquean, el manipulador conserva su posición; ello. constituye un aspecto importante de seguridad para ciertas. aplicaciones, como por ejemplo la robótica médica. •. La relación masa del robot frente a carga a soportar es mucho menor, por lo que admiten mayores aceleraciones durante su movimiento, y por ello, mayores velocidades, también tienen mayor rigidez y precisión ya que soportan la carga por medio de varios brazos en paralelo.. •. Otra ventaja de los manipuladores paralelos es que los motores de los actuadores están instalados en la plataforma fija, y por ello, son fijos. En cambio en los robots tipo serie los motores de los actuadores están montados en las articulaciones de los diferentes eslabones que componen el robot, lo que hace que la mayor parte de los motores tengan ciertos desplazamientos aumentando las masas móviles y con ello las fuerzas de inercia y el riesgo de averías.. 1.2.2. Desventajas de los robots paralelos con respecto a los tipo serie •. La principal desventaja de los robots paralelos radica en que su configuración en lazo cerrado restringe el movimiento del sistema, lo cual dificulta la obtención sistemática de las ecuaciones que definen su comportamiento dinámico.. •. Tienen menor espacio de trabajo que los robots tipo serie.. 1.3. Situación de las plataformas de simulación en Cuba En Cuba, la Empresa de Automatización Integral (CEDAI) dirige el tema de las aplicaciones electro-neumáticas en la automatización de la industria nacional, pero se centra especialmente en aplicaciones de posicionamiento discreto de las cargas (“pick and place”). Otra empresa cubana, el Centro de Investigación y Desarrollo de Simuladores Profesionales (SIMPRO), desarrolla simuladores de conducción. basados. en. Realidad. Virtual,. que. emplean. actuadores. electroneumáticos para proporcionar los movimientos de ladeo y cabeceo a la. 23.
(29) Capítulo I cabina del conductor [10]. Sus prestaciones actuales son limitadas, dado que no disponen de una estrategia de control adecuada. No obstante el SIMPRO ha instalado más de 20 plataformas de simulación en todo el país, ya que las plataformas antes existentes para el entrenamiento y el aprendizaje estaban obsoletas e inactivas. Esta empresa ha estado investigando hasta nuestros días plataformas de dos grados de libertad con vistas a desarrollar simuladores de conducción, de tres grados, de cuatro y seis, todos con objetivos similares, aunque está en sus planes expandir sus producciones hacia el sector del ocio. En el centro desde hace varios años el Grupo de Investigación de Automática, Robótica y Percepción perteneciente al Dpto. de Automática lleva a cabo tareas de investigación en el control de robots paralelos aplicados a simuladores de conducción, en colaboración conjunta con el SIMPRO, una empresa de gran experiencia en el país en la producción y explotación de simuladores de conducción. Dicha empresa garantiza todo el aseguramiento material y parte del financiamiento de las investigaciones cuyos resultados serán incorporados a los elementos productivos de la misma. En tal sentido se vienen estudiando variantes de control para plataformas de 2, 3 y 6 grados de libertad. En nuestro caso la atención está centrada en una estructura robótica paralela de 3 grados de libertad, que realiza las funciones de simulador de conducción. [11]. 24.
(30) Capítulo I. Conclusiones parciales •. Hay una gran cantidad de esferas donde se emplean los robots en el mercado, además de la gran diversidad de diseños.. •. Los robots paralelos son más ventajosos que los series, aunque éstos últimos predominan en el mercado.. •. En Cuba hay poca explotación de los robots a pesar de las ventajas para la vida y el desarrollo.. 25.
(31) Capítulo II. CAPÍTULO II En años recientes, en el campo de Ingeniería Mecánica se ha manifestado una tendencia hacia requerimientos más estrictos del diseño que respondan a los nuevos estándares y normas nacionales e internacionales. Esto conlleva a la necesidad de crear sistemas mecánicos más modernos y complejos además de que éstos utilicen nuevos y mejores materiales, con el objeto de obtener un mejor desempeño y reducir su costo. La línea de investigación está asociada con el tópico de investigación "Optimización de sistemas mecánicos". Ésta línea está dividida en dos sub-tópicos: “Comportamiento Estático y Dinámico de Sistemas Mecánicos” y “Modificación de Propiedades de Sistemas Mecánicos”, los cuales se establecieron para responder a la necesidad de analizar conjunta y/o separadamente una amplia variedad de problemas existentes en el proceso de diseño, construcción o rediseño de máquinas y sistemas mecánicos, con sus elementos y uniones. Se abordan temáticas relacionadas con el análisis estático y dinámico de sistemas mecánicos, que han incluido estudios de elementos deformables. en. uniones. mecánicas. y. de. fenómenos. de. vibración,. amortiguamiento, esfuerzos y deformaciones, como los causados por el impacto de componentes mecánicos; también se han abordado problemas de tribología como lo son el desgaste, la fricción y los ajustes de componentes mecánicos. Áreas novedosas de aplicación de las investigaciones del Departamento de Ingeniería Mecánica, en la cual se utilizan elementos de diversas disciplinas es la mecatrónica y la biomecánica, donde el diseño de elementos protésicos para cadera, rodilla, entre otros es un ambiente de investigación muy interesante, además esta área ha involucrado desarrollos relacionados con la modificación de las estructuras de mecanismos y el diseño de nuevas estructuras. En este capítulo se realiza un rediseño a una plataforma de simulación de 3 grados de libertad, en la que se toman varios criterios para realizarlos, puntos de vista que nos brinda el cliente en los cuales se basa para según las prestaciones que brindará la plataforma rediseñada.. 26.
(32) Capítulo II Estos criterios a tener en cuenta son: 1.. Mantener la estética de la plataforma original.. 2.. Bajar el centro de masa de la plataforma a rediseñar.. 3.. Disminuir su peso.. 4.. Eliminar el ángulo que forman los actuadores neumáticos con la normal.. 5.. Simplificar la complejidad de la estructura mecánica manteniendo el espacio de trabajo de la plataforma original.. 6.. Eliminar la complejidad que presenta la cadena cinemática principal, y tratar de hacer las tres cadenas cinemáticas lo mas idénticas posible.. 7.. Bajar el ladeo de la plataforma a ± 4 grados, es decir ladeo máximo 8 grados.. 8.. Eliminar dos puntos muertos debido a problemas constructivos, donde los elementos rígidos de la plataforma chocan.. 9.. Disminuir su costo.. Nociones de máquinas, mecanismos y cadenas cinemáticas Una cadena cinemática es una colección de eslabones y articulaciones conectados. Un eslabón puede ser definido de manera más generalizada como un cuerpo o elemento rígido con dos o más nodos o puntos de unión. Una articulación, también conocida como par cinemático, es una conexión entre dos eslabones mediante sus nodos que permite un movimiento relativo entre ellos. Puede ser clasificada por el número de grados de libertad que permite, el cual es denotado como f, o bien por su orden, es decir, el número de eslabones que conecta.. 27.
(33) Capítulo II Asimismo, éstas pueden ser actuadas mediante un controlador (o manualmente), denominándose activas, o bien, ser dependientes de la posición y fuerzas del mecanismo, es decir, tratarse de articulaciones pasivas. Las articulaciones elementales poseen un tipo de movimiento o grado de libertad y pueden ser rotacionales (de revolución) o lineales (prismáticas): Una articulación de revolución (R) es como una bisagra ya que permite la rotación relativa entre dos elementos rígidos, y es la más comúnmente empleada. Una articulación prismática (P) permite el movimiento lineal relativo (traslación) entre dos elementos rígidos o eslabones. Las variables de articulación, denotadas por θi para una articulación de revolución y di para una prismática, representan el movimiento relativo entre eslabones adyacentes. Algunos tipos de articulaciones se muestran en la tabla 1:. Tabla 1. Tipos de articulaciones comunes [1]. 2.1 Arquitecturas de las plataformas En este epígrafe se hace una panorámica de las arquitecturas de las plataformas de simulación, tanto de la original como de la rediseñada en los que se destaca los grados de libertad de las plataformas y sus vistas isométricas.. 28.
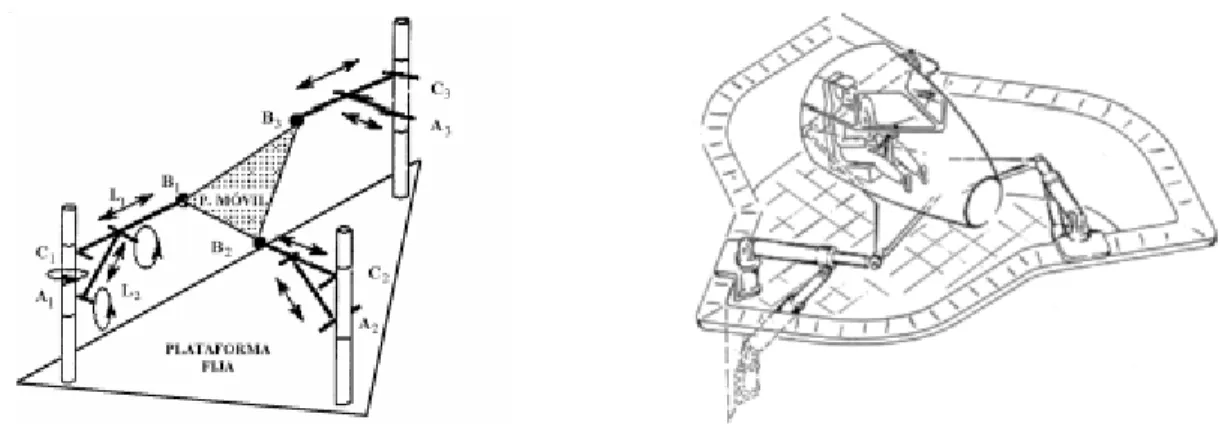
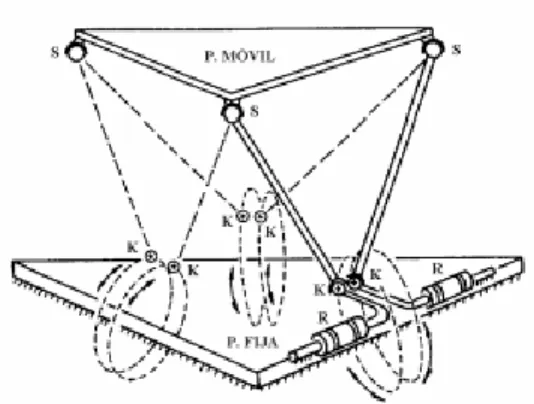
(34) Capítulo II 2.1.1 Arquitectura de la plataforma original El simulador de movimiento objeto de estudio se muestra en la figura 29. El mismo está compuesto por una base fija unida a la plataforma móvil mediante 3 cadenas cinemáticas. independientes. accionadas. por. cilindros. neumáticos,. cuyos. desplazamientos lineales proporcionan los tres grados de libertad con que cuenta el sistema. Adicionalmente a las tres cadenas cinemáticas actuadas, entre la base fija y el efector final hay colocados dos cuerpos rígidos entrecruzados (representados en color más claro en la figura 29), cuya función es proporcionar una mayor estabilidad y rigidez mecánica a la estructura robótica.. Los. desplazamientos lineales de cilindros neumáticos de doble efecto proporcionan los grados de libertad del sistema; que son: ladeo (rotación alrededor del eje x), cabeceo (rotación alrededor del eje y) y elevación (desplazamiento a lo largo del eje z) según se muestra en la figura 30; donde los valores deseados de rotación, desplazamiento se obtienen de un mundo virtual y gracias a ello simular escenas lo más real posible que son mostradas en un monitor ubicado en el interior o el exterior de una cabina que descansa soportada sobre la plataforma móvil.[11]. Figura 29. Simulador de 3 grados de libertad, modelo isométrico.. 29.
(35) Capítulo II. Figura 30. Representación de los movimientos de la cabina de conducción que va soportada sobre la plataforma móvil.. 2.1.2 Arquitectura de la plataforma rediseñada El rediseño del simulador de movimiento mostrado en la figura 31, al cual se le ha analizado mecánicamente su estructura lo basamos en diferentes puntos de vistas según nuestro cliente (SIMPRO), algunos de los cuales son: una estética similar, algunas piezas encontradas en la plataforma original debían permanecer iguales para a la hora de la construcción del simulador tener ya la tecnología con que se cuenta en la empresa, ya sea de soldadura o de montaje, otro de los puntos que se tuvieron en cuenta fue la necesidad de bajar el centro de masa, para evitar vibraciones en la base fija causadas por las aceleraciones de los efectores, otro punto de vista fue tratar de hacer homogéneas las tres cadenas cinemáticas cerradas para facilitar el control de la plataforma; siguiendo estos puntos los más importantes a solucionar de los criterios a tener en cuenta antes mencionados, el simulador rediseñado (figura 31) presenta una base fija unida al efector mediante las tres cadenas cinemáticas independientes accionadas por los tres actuadores neumáticos de doble efecto los cuales le dan a la plataforma los tres grados de libertad al igual que el anterior diseño, otro criterio fue tratar de eliminar el ángulo entre los efectores y la normal de forma que los tres actuadores reciban todo el peso perpendicularmente, de esta forma todo el esfuerzo de los actuadores va hacia el seguidor del efector, de lo contrario si existe un ángulo entre el actuador y la normal como en el diseño original, la fuerza que se encuentra actuando en el nódulo superior del actuador se descompone, asimilando una parte de esta fuerza. 30.
(36) Capítulo II que es la que mueve a la plataforma móvil y otra parte de esta fuerza que tiende a flexionar, romper el seguidor del efector. El nuevo mecanismo también cuenta con un cuerpo rígido entre la base fija y el efector, asegurando la rigidez de la plataforma, éste a diferencia de los elementos rígidos que presentaba la plataforma original es sólo medio elemento de dos entrecruzados que existían anteriormente, lo que favorece el nuevo diseño al disminuir su costo a la hora de la construcción, debido al ahorro de materiales. En los anexos se muestran algunos cálculos hechos a varias piezas de la plataforma rediseñada.. Figura.31 Simulador de conducción de 3 grados de libertad, modelo isométrico.. 2.2 Principales datos de las plataformas Los datos que se muestran a continuación nos permiten observar las principales características de ambas plataformas con los que se pueden definir las prestaciones para las cuales se han credo cada uno de los diseños.. 2.2.1 Principales datos de la plataforma original En la tabla 2 se muestran los principales datos y especificaciones técnicas de la plataforma de simulación, cuyos actuadores lo forman cilindros electroneumáticos de doble efecto FESTO DNC-125-500 accionados por válvulas solenoides de flujo MPYE-5-3/8 que a su vez reciben las señales de mando desde controladores empotrados.[13].. 31.
(37) Capítulo II. Parámetros. Valor. Unidad. 720, 785, 1560. mm. Máxima elongación de los cilindros. 500. mm. Ángulo máximo de ladeo (ver fig. 32). ± 17. grados. Ángulo máximo de cabeceo (ver fig. 32). ± 15. grados. Máxima elevación de la plataforma móvil. ±215. mm. Aceleración máxima de los actuadores. 980. mm/s2. Masa de la cabina con ocupantes. 200. kg. Masa total (sin cabina) del robot. 834. kg. Relación carga útil-peso. 2.18. -. Coordenadas centro de masa del robot. (ver fig. 32). Tabla 2. Principales datos de la plataforma original.. Ladeo negativo. Ladeo positivo. Cabeceo. Figura 32. Representación de los principales movimientos de la plataforma. Datos de los actuadores -. Tipo de actuador: Cilindros Neumáticos. 32. Elevación.
(38) Capítulo II -. Cantidad: 3. -. Acción: Doble Efecto.. -. Fabricante: FESTO.. -. Modelo: DNC 125-500-PPV-A. -. Fuerza de cada actuador: 7.363 kN (a 6 bares).. -. Presión de trabajo: 6 a 10 bares. 2.2.2 Principales datos de la plataforma rediseñada En la siguiente tabla se muestran los datos de la plataforma rediseñada aunque tomando en cuenta uno de los criterios a la hora de rediseñar que es: mantener la estética del simulador original, algunas piezas no se cambian manteniendo las características que se presentan en el anterior epígrafe.. Parámetros. Valor. Unidad. 720, 785, 900. mm. Máxima elongación de los cilindros. 150. mm. Ángulo máximo de ladeo. ±4. grados. Ángulo máximo de cabeceo. ±3. grados. Máxima elevación de la plataforma móvil. ±215. mm. Aceleración máxima de los actuadores. 980. mm/s2. Masa de la cabina con ocupantes. 200. kg. Coordenadas centro de masa del robot. Tabla 3. Principales datos de la plataforma rediseñada.. 2.3 Análisis de las cadenas cinemáticas El siguiente análisis se desarrolla para mostrar la complejidad de las cadenas cinemáticas de ambos diseños para poder hacer una comparación en cuanto a. 33.
(39) Capítulo II éstas, dándonos una idea de los resultados que se pueden obtener a partir de las mismas. 2.3.1 Análisis de las cadenas cinemáticas de la plataforma original La cadena cinemática central es del tipo SPSU siendo gobernada por el pistón 1, en la parte trasera las uniones de la plataforma móvil con la base fija son soportadas por dos cadenas cinemáticas idénticas del tipo 2-SPS, accionadas por los pistones 2 y 3 respectivamente. (Como se muestra en la figura 33). Figura 33. Arquitectura del simulador de conducción.. En la figura 34 se muestran los vectores de cierre de las tres cadenas cinemáticas independientes donde podemos notar que no son homogéneas ya que la cadena cinemática principal presenta un sistema de cierre diferente a la de las otras (2 y 3) ya que está unida a uno de los dos cuerpos rígidos entrecruzados cuya función es proporcionar una mayor estabilidad y rigidez mecánica a la estructura; además las distancias entre el centro “O” y los tres puntos de apoyo de los actuadores neumáticos (A1, A2 y A3) no es la misma, debido a estas diferencias entre los actuadores, los análisis cinemáticos y dinámicos se hacen más complejos y con una alta probabilidad de introducir errores a la hora de los cálculos.. 34.
(40) Capítulo II. Figura 34. Vectores de cierre de las cadenas cinemáticas activas. 2.3.2 Análisis de las cadenas cinemáticas de la plataforma rediseñada La cadena cinemática central es del tipo SPS siendo gobernada por el pistón 1, en la parte trasera las uniones de la plataforma móvil con la base fija son soportadas por dos cadenas cinemáticas idénticas a la del tipo 2-SPS, accionadas por los pistones 2 y 3 respectivamente. (Como se muestra en la figura 35). Figura 35. Arquitectura del simulador de conducción rediseñado.. En la figura 36 se muestran los vectores de cierre de las tres cadenas cinemáticas independientes donde podemos notar que son homogéneas ya que la cadena cinemática principal presenta un sistema de cierre igual a la de las otras (2 y 3); además las distancias entre el centro “O” y los tres puntos de apoyo de los actuadores neumáticos (A1, A2 y A3) es la misma, por lo que los análisis cinemáticos y dinámicos se hacen más sencillos que en le diseño anterior y con una menor probabilidad de introducir errores a la hora de los cálculos.. 35.
(41) Capítulo II. Figura 36. Vectores de cierre de las cadenas cinemáticas activas.. 36.
(42) Capítulo II. Conclusiones parciales •. El simulador original presenta una estructura mecánica compleja de controlar.. •. La plataforma rediseñada presenta cadenas cinemáticas más sencillas que la original.. •. Se obtuvo un diseño que cumple y satisface las expectativas del cliente logrando así el objetivo del trabajo.. 37.
(43) Capítulo III. CAPÍTULO III En la actualidad no se concibe una investigación científica sin un análisis de la sostenibilidad en el que se aborden puntos claves como el costo total de la investigación, el impacto medio-ambiental de éste, así como la importancia de realizarla; en este capítulo se efectúa un análisis económico de la plataforma original y se hace una comparación con la rediseñada, demostrando que es factible realizar el rediseño, además se hace un análisis ambiental destacando las razones por lo que los simuladores son beneficiosos en este punto. Hoy en día se maneja un término que integra tres aspectos muy importantes en la vida del hombre, este término se denomina “Sostenibilidad”, a continuación se presenta una explicación gráfica donde se muestra de una forma sencilla.. Figura 37. Gráfico de sostenibilidad.. Ahora bien el principio de sostenibilidad está basado en varios conceptos: La ciencia de la sostenibilidad y la ciencia ambiental forman las bases de la estructura analítica y filosófica, mientras que los datos se coleccionan por medio de medidas de sostenibilidad. Después se usan estos datos para formular planes de políticas de sostenibilidad. El término desarrollo sostenible, perdurable o sustentable se aplica al desarrollo socio-económico y fue formalizado por primera vez en el documento conocido como Informe Brundtland (1987), fruto de los trabajos de la Comisión Mundial de Medio Ambiente y Desarrollo de Naciones Unidas, creada en. 38.
(44) Capítulo III Asamblea de las Naciones Unidas en 1983. Dicha definición se asumiría en el Principio 3.º de la Declaración de Río (1992). El ámbito del desarrollo sostenible puede dividirse conceptualmente en tres partes: ambiental, económica y social. Se considera el aspecto social por la relación entre el bienestar social con el medio ambiente y la bonanza económica. El triple resultado es un conjunto de indicadores de desempeño de una organización en las tres áreas. Deben satisfacerse las necesidades de la sociedad como alimentación, ropa, vivienda y trabajo, pues si la pobreza es habitual, el mundo estará encaminado a catástrofes de varios tipos, incluidas las ecológicas. Asimismo, el desarrollo y el bienestar social, están limitados por el nivel tecnológico, los recursos del medio ambiente y la capacidad del medio ambiente para absorber los efectos de la actividad humana. Ante esta situación, se plantea la posibilidad de mejorar la tecnología y la organización social de forma que el medio ambiente pueda recuperarse al mismo ritmo que es afectado por la actividad humana. El desarrollo sostenible no se aceptó exclusivamente en las cuestiones ambientales. En términos más generales, las políticas de desarrollo sostenible afectan a tres áreas: económica, ambiental y social. En apoyo a esto, varios textos de las Naciones Unidas, incluyendo el Documento Final de la Cumbre Mundial de 2005 se refieren a los tres componentes del desarrollo sostenible, que son el desarrollo económico, el desarrollo social y la protección del medio ambiente, como "pilares interdependientes que se refuerzan mutuamente". La Declaración Universal sobre la Diversidad Cultural (Unesco, 2001) profundiza aún más en el concepto al afirmar que "... la diversidad cultural es tan necesaria para el género humano como la diversidad biológica para los organismos vivos"; Se convierte en "una de las raíces del desarrollo entendido no sólo en términos de crecimiento económico, sino también como un medio para lograr un balance más. 39.
(45) Capítulo III satisfactorio intelectual, afectivo, moral y espiritual". En esta visión, la diversidad cultural es el cuarto ámbito de la política de desarrollo sostenible. El "desarrollo verde" generalmente es diferenciado del desarrollo sostenible en que el desarrollo verde puede ser visto en el sentido de dar prioridad a lo que algunos pueden considerar "sostenibilidad ambiental" sobre la "sostenibilidad económica y cultural". Sin embargo, el enfoque del "desarrollo verde" puede pretender objetivos a largo plazo inalcanzables Por ejemplo, una planta de tratamiento de última tecnología con gastos de mantenimiento sumamente altos no puede ser sostenible en las regiones del mundo con menos recursos financieros. Una planta de última tecnología "respetuosa con el medio ambiente" con altos gastos de operación es menos sostenible que una planta rudimentaria, incluso si es más eficaz desde un punto de vista ambiental. Algunas investigaciones parten de esta definición para argumentar que el medio ambiente es una combinación de naturaleza y cultura. El sitio "Desarrollo sostenible en un mundo. diverso". trabaja. en. esta. dirección. integrando. capacidades. multidisciplinarias e interpretando la diversidad cultural como un elemento clave de una nueva estrategia para el desarrollo sostenible. El objetivo del desarrollo sostenible es definir proyectos viables y reconciliar los aspectos económico, social, y ambiental de las actividades humanas; "tres pilares" que deben tenerse en cuenta por parte de las comunidades, tanto empresas como personas: •. Económico: funcionamiento financiero "clásico", pero también capacidad para contribuir al desarrollo económico en el ámbito de creación de empresas de todos los niveles.. •. Social: consecuencias sociales de la actividad de la empresa en todos los niveles: los trabajadores (condiciones de trabajo, nivel salarial, etc.), los proveedores, los clientes, las comunidades locales y la sociedad en general, necesidades humanas básicas.. 40.
(46) Capítulo III •. Ambiental: compatibilidad entre la actividad social de la empresa y la preservación de la biodiversidad y de los ecosistemas. Incluye un análisis de los impactos del desarrollo social de las empresas y de sus productos en términos de flujos, consumo de recursos difícil o lentamente renovables, así como en términos de generación de residuos y emisiones... Este último pilar es necesario para que los otros dos sean estables.. La justificación del desarrollo sostenible proviene tanto del hecho de tener unos recursos naturales limitados (nutrientes en el suelo, agua potable, minerales, etc.), susceptibles de agotarse, como del hecho de que una creciente actividad económica sin más criterio que el económico produce, tanto a escala local como planetaria, graves problemas medioambientales que pueden llegar a ser irreversibles. Los límites de los recursos naturales sugieren tres reglas básicas en relación con los ritmos de desarrollo sostenibles. 1. Ningún recurso renovable deberá utilizarse a un ritmo superior al de su generación. 2. Ningún contaminante deberá producirse a un ritmo superior al que pueda ser reciclado, neutralizado o absorbido por el medio ambiente. 3. Ningún recurso no renovable deberá aprovecharse a mayor velocidad de la necesaria para sustituirlo por un recurso renovable utilizado de manera sostenible. Según algunos autores, estas tres reglas están forzosamente supeditadas a la inexistencia de un crecimiento demográfico. [12]. 41.
(47) Capítulo III 3.1. Análisis Económico de la plataforma original. El precio de la plataforma objeto de estudio es de aproximadamente 18 000 USD y con la cabina del simulador completo incluyendo el sistema de visualización, oscila en un valor entre los 40 000 a 50 000 USD. El costo de producción es menor que los precios mencionados anteriormente ya que los productos que conforman la cabina con sistema de visualización, conteniendo computadora, monitor, tarjeta aceleradora de video, backup, tarjeta de audio, tiene un costo de 4327 USD, además las piezas mecánicas que la conforman son relativamente baratas, por ejemplo el metro cuadrado de lámina de acero de 3 mm de espesor cuesta 13.00 USD, por otra parte los actuadores que son cilindros neumáticos de doble efecto tienen un costo de aproximadamente 700 USD, sumándole las electroválvulas, posibles censores de presión y encoder de desplazamiento lineal se eleva alrededor de 3400 USD. En el anexo I y II se hace referencia al costo directo de la plataforma según SIMPRO. 3.2. Análisis económico de la plataforma rediseñada Teniendo en cuenta el costo de la plataforma en el extranjero, de la original y del costo de sus materiales de construcción se ahorran con el nuevo diseño alrededor de 65.00 USD además de toda la tecnología que se emplearía en el proceso, que serían los electrodos para la soldadura a utilizar en la construcción los elementos rígidos, la energía a emplear en el proceso, la eliminación de la barra por donde se deslizaba el elemento de una de las piezas rígidas así como los apoyos, taladros etc., abaratando el costo de producción de la plataforma y de la mano de obra.. 3.3. Análisis socio-ambiental de los simuladores. No se concibe una investigación sin un análisis ambiental dada la situación de crisis por la que se está pasando en la actualidad, el uso excesivo y derrochador de los recursos naturales, la contaminación producida por casi todas las industrias, la transportación en general, los accidentes con repercusión ambiental, entre otras negligencias, se está llevando al caos ambiental, por lo que cada investigador. 42.
(48) Capítulo III debe aportar su granito de arena para mejorar de algún modo la situación ambiental. En el caso de este trabajo se abordó un tema que está tomando un lugar importante en muchas esferas de la vida, ya que mediante la simulación de un ambiente de trabajo o de investigaciones peligrosas se puede tener una idea previa de lo que se quiere, sin arriesgarse a realizarlas. Los simuladores en este caso, de conducción, ayudan al conductor a mejorar sus sentidos y sus reacciones en la práctica real, es decir el tiempo de reacción en la carretera, pues se pueden simular situaciones peligrosas y así capacitar al conductor mucho mejor que un conductor que aprende en un ambiente real, además se evitan accidentes en el proceso de aprendizaje así como el desgaste de piezas o el mal trato. En el caso de la simulación mientras más compleja es la situación más se ahorran recursos en la realidad, un ejemplo de ello es la simulación de la conducción de un vehículo corriente comparado con la de un vehículo militar de gran envergadura donde el consumo de combustible es mucho mayor, llegando a ahorrar hasta más de un 80% del combustible en el aprendizaje, lo que es muy factible en estos tiempos. Según los especialistas en el tema una sesión de aprendizaje en un simulador está alrededor de 15 minutos, lo que un día se deben capacitar 30 personas; el compresor. que. se. utiliza. para. alimentar. los. cilindros. es. de. 5.5kW. (5.5kW*7.5h=41.25kWh en el día) más 300W de potencia en la computadora de control, que serían 300W*7.5h/1000kW= 2.25kWh de consumo en un día, en total 43.5 kWh consumidos por el compresor y la computadora en el día; teniendo en cuenta que en el país para generar un 1kWh de energía eléctrica, se queman 340g de combustibles, este valor es un valor medio entre las emisiones de un grupo electrógeno, y una termoeléctrica(no se toman en cuenta las pérdidas de transmisión y distribución); que por cada kg de combustible que se queme se obtiene 3kg de CO2, este valor es aproximado, que se toma del análisis estequiométrico hecho al combustible donde: La masa molecular del carbono en el análisis estequiométrico del combustible es C-12, el oxígeno es O-16 pero como se multiplica por 2 queda O-32, quedando 12 + 32 = 44. 44 / 12 = 3.66, ahora bien, de los combustibles se considera que es. 43.
(49) Capítulo III carbono sólo el 80% por lo que 3.66*0.8 = 2.928 pero para cálculos de ingeniería se toma 3. Un barril de petróleo está a $75,71 USD (este valor está en constante cambio, por lo que se tomó como referencia el precio del mercado internacional del 29/6/2010 y se referencia en [14], que una tonelada tiene 7 barriles se puede llegar a que: 1 tonelada = 1000kg =7 barriles de petróleo 7*$75.71=$529.97 USD la tonelada de combustible $529.97/1000kg = 0.5$/kg Ahora: 1 kWh = 340g de combustible = 0.340kg 43.5 kWh = 14.79 kg/kWh de consumo de combustible en un día. El simulador ahorra un 80% del combustible en el aprendizaje (comparado con lo que consume un camión) 14.79---------20%. X= 74.5 kg/kWh. X--------------100%. 74.5--------100% Y------------80%. Y = 59.6 kg/kWh. Entonces el total de combustible ahorrado multiplicado por 3 nos da el CO2 no emitido quedando 59.6kg *3kg de CO2 = 178.8 kg de CO2 que se dejan de emitir a la atmósfera. Además 59.6kg/kWh*0.5 $/kg= $29.80 que se ahorran en el día en la generación de corriente eléctrica del país. Actualmente, el precio del CO2 en el mundo es de aproximadamente 15 dólares la tonelada, por lo que 178.8/1000*15=$2.68USD ahorrados por emisión de CO2 a la atmósfera en un día. (Fecha-2/7/2010)[15] Nota: Se trabaja sólo con CO2 como residuo en la combustión pero existen otros productos residuales. Como sulfuros, CO, combustible sin quemar, entre otros.. 44.
(50) Capítulo III. Conclusiones parciales •. Si se construye la plataforma rediseñada con la tecnología existente en el país se ahorran $65.00 USD más la tecnología que se emplearía en el proceso, comparada con la plataforma ya existente.. •. La utilización de simuladores de conducción en este caso ahorran un 80% de combustible al país, disminuyendo así las emisiones de CO2 a la atmósfera en 178.8 kg y se ahorran $2.68 USD por día del mismo.. •. Se puede afirmar que este trabajo cumple con la sostenibilidad ambiental, con la sostenibilidad económica y con la sostenibilidad social, siendo el mismo sostenible desde el punto de vista global.. 45.
(51) Conclusiones. CONCLUSIONES •. Existe gran cantidad de esferas donde se emplean los robots en el mercado, además de la gran diversidad de diseños.. •. En Cuba existe poca explotación de los robots, a pesar de las ventajas para la vida y el desarrollo.. •. El simulador original presenta una estructura mecánica y cadenas cinemáticas complejas de controlar.. •. Se obtuvo un diseño que cumple y satisface las expectativas del cliente logrando así el objetivo del trabajo.. •. Si se construye la plataforma rediseñada con la tecnología existente en el país se ahorran $65.00 USD más la tecnología que se emplearía en el proceso, comparada con la plataforma ya existente.. •. La utilización de simuladores de conducción en este caso ahorran un 80% de combustible al país, disminuyendo así las emisiones de CO2 a la atmósfera en 178.8 kg y se ahorran $2.68 USD por día del mismo.. •. Se puede afirmar que este trabajo cumple con la sostenibilidad ambiental, económica y social, siendo el mismo sostenible desde el punto de vista global.. 46.
(52) Recomendaciones. RECOMENDACIONES •. Analizar diseños más optimizados para el mecanismo del simulador.. •. Sustituir los actuadores neumáticos por hidráulicos.. •. Analizar una solución para llevar a un mismo plano horizontal las dos rotaciones en el mecanismo cardánico.. •. Sustituir piezas soldadas por acoplamientos por tornillos para hacer mejor su manipulación en el montaje y desmontaje.. 47.
(53) Bibliografía. BIBLIOGRAFÍA [1]- LIMÓN, R. C. (2006) Modelo Matemático de un Robot Paralelo de Seis Grados de Libertad. Ph. D. Thesis of Computer, Electronics, Physics and Innovation. Puebla, University of Americas. [2]- TSAI, L.-W. (2000) Robot Analysis. The Mechanic of Serial and Parallel Manipulators., New York / Chichester / Weinheim / Brisbane / Singapore / Toronto, A Willer-Interscience Publication. [3]- IA Bonev Los verdaderos orígenes de la robótica. Enero, 24, 2003, http://www.parallemic.org/Reviews/Review007.html.). menciona. una. patente. presentada en 1928 Por JE Gwin - neto (Gwinnett JE dispositivo de atracciones, enero, 20, 1931. Unidos StatesPatent n ◦ 1.789.680). [4]- BARRIENTOS, A., PEÑIN, L. F., BALAGUER, C. & ARACIL, R. (1997) Fundamentos de Robótica, Madrid, España, MCGraw-Bill Interamericana España. [5]- MERLET, J.-P. (2006) Parallel Robots, France, Springer Editorial. [6]- ZABALZA, I. & ROS, J. (Octubre 2007) Aplicaciones Actuales de los Robots Paralelos. 8vo Congreso Iberoamericano de Ingeniería Mecánica. [7]- K.L. Cappel, Motion simulator, patente Nº US3295224, 1967 [8]- SANZ, M. G. & CASADO, M. M. (Abril 2005) Herramientas para el Estudio de Robots de Cinemática Paralela: Simulador y Prototipo Experimental. RIAI Revista Iberoamericana de Automática e Informática Industrial, Vol 2. Disponible en: http://riai.isa.upv.es [9]- ARACIL, R., SALTARÉN, R. J., SABATER, J. M. & REINOSO, O. (Enero 2006) Robots Paralelos: Máquinas con un Pasado para una Robótica del Futuro. Revista Iberoamericana de Automática e Informática Industrial, Vol. 3 [10]- [Moreno, 2000] Moreno, R., "Plataforma para Simuladores", SIMPRO, Instituto Superior Politécnico "José Antonio Echevarría", 2000.. 48.
(54) Bibliografía [11]-[Eduardo Izaguirre] y col. MODELO DINAMICO BASADO EN EL PRINCIPIO DEL TRABAJO VIRTUAL PARA ROBOT PARALELO. (2010) [12]- http://es.wikipedia.org/wiki/Desarrollo_sostenible. [13]- CD Catálogo de FESTO [14]- http://www.bbc.co.uk/mundo/mercados/ [15]- http://www.ecologiablog.com/post/1015/vancouver-2010-las-olimpiadas-deinvierno-compensaran-sus-emisiones-de-co2. [16]-Termodinámica (Fire) [15]-Bruno Siciliano, Ossama Khatib(2008), Springer Handbook of robotics. [16]-Luis Angel Silva, Optimal Design off a Parallel Robot with High Performance. [17]-Gursel Alici, Bijan Shirinzadeh (2003), Loci of singular configurations of a 3DOF spherical paralle.. [18]-Alon Wolf, Erika Ottaviano, Moshe Shoham, Marco Ceccarelli, (2003), Application of line geometry complex approximation to singularity analysis of the 3DOF CaPaMan parallel manipulator.. [19]-Stefan Staicu, Dan Zhang, Radu Rugescu, (2005), Dynamic modelling of a 3DOF parallel manipulator using recursive matrix relations.. [20]-Yangmi Li, Qingsong Xu, (2007), Stiffness analysis for a 3-PUU parallel kinematic machine.. 49.
(55) Anexos. ANEXOS Anexo I Ficha de costo de la plataforma original según SIMPRO. DESAGREGACION DE LOS INSUMOS FUNDAMENTALES. CÓDIGO DEL PRODUCTO O SERVICIO:. Descricción Del Producto:. 08.01.00.0002 CÓDIGO. Conducción de BMP PRODUCTO. UM. NORMA. PRECIO. IMPORTE. CONSUMO. UNITARIO. TOTAL. DIRECCION DE COMUNICACIONES 112,1,02,0004,. COMPUTADORA. U. 1. 931.14. 931.14. 100.0.00.0031. MONITOR. U. 2. 691.14. 1382.28. 112.1.10.0006. TARJETA ACELERADORA VIDEO. U. 1. 1796.46. 1796.46. 735.1.10.0054. BAKUP. U. 1. 200.00. 200.00. 100.1.17.1017. TARJETA DE AUDIO. U. 1. 17.63. 17.63. 910,7,05,1900. TRANSFORMADOR 3 220V 28. U. 1. 234.86. 234.86. TOTAL. 4562.37. DEPARTAMENTO DE FONDOS MATERIALES 272,8,22,0300. PLANCHA ACERO 20MMX2500X6MM. T. 0.25. 863.24. 215.81. 280,4,20,1077. VIGA U 120MM. T. 0.1666. 4800.00. 799.68. 284,5,11,0220. BARRA DE BRONCE 30MM. MTS. 0.5. 12.96. 6.48. 50.
(56) Anexos 264,1,02,0280. BARRA ACERO 28MM REDONDA. T. 0.25. 1035.30. 258.83. 272,8,11,1528. PLACHA ACERO 10MM P/P 06950. T. 0.25. 283.09. 70.77. 272,7,41,0200. CHAPA ACERO 2MM X1250X3MM. U. 0.25. 554.06. 138.52. 272,7,11,0268. CHAPA ACERO 1MMX1200X2500. T. 1.5. 430.00. 645.00. 361,1,09,1416. ELECTRODO 5MM. KG. 2. 0.98. 1.96. 266,1,01,0080. CHAPA 0,3MMX1000X2MM. T. 0.78872. 707.65. 558.14. 272,3,01,0324. ANGULAR ACERO 32X32MM. U. 5. 3.18. 15.9. 536,1,64,2460. ANGULAR ACERO 20X20. U. 2. 1.41. 2.82. 303,1,64,2460. TORNILLO N8X25. U. 20. 0.09. 1.80. 303,5,70,1716. TORNILLO M10X30. KG. 0.5. 8.15. 4.075. 303,5,14,5220. TORNILLO M6X20. CU. 30. 0.95. 28.50. 303,4,16,5108. TUERCA M8. U. 20. 0.043. 0.86. 303,4,16,5118. TUERCA M10. CU. 10. 0.16. 1.60. 3034,16,5112. TUERCA M6. CU. 30. 0.17. 5.10. 303,4,46,1006. ARANDELA PLANA M6. CU. 30. 0.18. 5.40. 303,4,46,1008. ARANDELA PLANA M8. CU. 20. 0.20. 4.00. 303,4,46,1145. ARANDELA PLANA M10. CU. 10. 0.30. 3.00. 316,1,09,1003. ELECTRODO 3MM. KG. 5. 0.98. 4.90. 316,1,09,1011. ELECTRODO 2,5MM. KG. 5. 0.98. 4.90. 338,4,01,0001. OXIGENO. M3. 2. 0.6895. 1.38. 336,1,01,0001. ACETILENO. M3. 1. 6.49. 6.49. 264,1,02,0110. BARRA ACERO REDONDA 11MM. M. 6. 0.78. 4.68. 310,4,12,1204. DISCO FITRO 6MM. U. 1. 1.16. 1.16. 51.
Figure
+7




Documento similar
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
Para recibir todos los números de referencia en un solo correo electrónico, es necesario que las solicitudes estén cumplimentadas y sean todos los datos válidos, incluido el
La determinación molecular es esencial para continuar optimizando el abordaje del cáncer de pulmón, por lo que es necesaria su inclusión en la cartera de servicios del Sistema
trañables para él: el campo, la vida del labriego, otra vez el tiempo, insinuando ahora una novedad: la distinción del tiempo pleno, el tiempo-vida, y el tiempo
Sólo que aquí, de una manera bien drástica, aunque a la vez coherente con lo más tuétano de sí mismo, la conversión de la poesía en objeto -reconocida ya sin telarañas
