UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
UNIANDES
FACULTAD DE SISTEMAS MERCANTILES
CARRERA DE SISTEMAS E INFORMÁTICA
Tesis de grado previo a la obtención del Titulo de
INGENIERO EN SISTEMAS INFORMÁTICOS
TEMA:
Robots autónomos controlados por sensores, que faciliten el proceso
de enseñanza-aprendizaje de robótica en la carrera de sistemas e informática
de Uniandes Tulcán.
AUTOR:
Diego Francisco Rosales Almeida
TUTOR:
Ing. Darwin Becerra
CERTIFICACIÓN DEL TUTOR
Ing. Darwin Becerra, en calidad de Asesor de Tesis, designado por disposición de Cancillería de la Uniandes, certifica que el señor Diego Francisco Rosales Almeida, egresado de la escuela de Sistemas Mercantiles, ha culminado con su trabajo de Tesis de Grado, con el tema: “Robots autónomos controlados por sensores, que faciliten el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas informáticos de Uniandes en la ciudad de Tulcán.”, elaboró su trabajo de grado bajo los requerimientos académicos de orden teórico, metodológico y validez práctica de UNIANDES.
De la misma manera autorizo que la presente Tesis de Grado sea sometida a presentación pública y evaluación por parte del tribunal evaluador que se designe.
Atentamente,
RESPONSABILIDAD DE AUTORIA DE TESIS
Yo, Diego Francisco Rosales Almeida, declaro en forma libre y voluntaria que el presente Trabajo de Grado, que versa sobre el tema: "Robots autónomos controlados por sensores, que faciliten el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas e informática de Uniandes Tulcán."; así como las expresiones vertidas en la tesis son de mi autoría. En consecuencia, asumo la responsabilidad de la originalidad y el cuidado respectivo al remitirme a las fuentes bibliográficas.
En igual forma, reconozco a la Universidad Regional Autónoma de los Andes la cesión de derechos del mismo, con carácter exclusivo, para que se de el uso que se estime pertinente.
Atentamente,
Índice General
INTRODUCCIÓN...1
Antecedentes de la Investigación...1
Situación Problémica...1
Problema Científico...2
Delimitación del Problema...2
Lugar...2
Tiempo...2
Objeto de Investigación y Campo de Acción...3
Objeto de Investigación:...3
Campo de Acción:...3
Identificación de la Línea de Investigación...3
Objetivos...3
Objetivo General:...3
Objetivos Específicos:...3
Idea a Defender...3
Variable Independiente:...3
Variable Dependiente:...4
Justificación del Tema...4
Metodología a emplear...4
Modalidad Cuantitativa...4
Modalidad Cualitativa...4
Tipos de Investigación...4
Investigación de Campo...4
Investigación Correlacional...5
Métodos Empíricos...5
Observación Científica:...5
Análisis Documental:...5
Validación por expertos:...5
Métodos Teóricos...5
Método analítico sintético:...5
Método inductivo-deductivo:...6
Método Sistémico:...6
Técnicas...6
Encuesta:...6
Instrumentos...6
Cuestionario:...6
Metodología de Desarrollo de la Robótica...6
Análisis Orientada a procesos autómatas...6
Diseño de procesos robóticos...7
Construcción de prototipos...7
Refinamiento o rediseño de robot...7
Construcción del Robot...7
Estructura de la Tesis...7
Elementos de novedad, aporte teórico y significación práctica...9
Aporte Teórico...9
Significación Práctica...9
Novedad...9
Capítulo I. MARCO TEÓRICO...10
Investigación Robótica...12
1.2. Análisis de las distintas posiciones teóricas de la robótica...13
1.2.1.1. Control de los robots...14
1.2.1.2. Niveles de autonomía...14
1.2.1.3 Principales componentes de un Robot...15
1.2.1.3.1 Fuente de poder...15
1.2.1.3.2. Actuadores...16
1.2.1.3.3. Motores Eléctricos...16
1.2.1.3.4. Actuadores elásticos...16
1.2.1.3.5. Músculos de cable...16
1.2.1.3.6. Músculos de Aire o Músculos artificiales neumáticos...16
1.2.1.3.7 Polímeros electroactivos...17
1.2.1.3.8. Motores Piezoeléctricos...17
1.2.1.3.9. Nanotubos Elásticos...17
1.2.1.3.10 Sensores...17
1.2.1.3.11. Sensores de Tacto...17
1.2.1.3.12 Sensores de Visión...18
1.2.1.3.13 Sensores de Manipulación...19
1.2.1.3.14 Pinzas Mecánicas...19
1.2.1.3.15 Garra de vacío...19
1.2.1.4. Locomoción de robots...19
1.2.1.4.1. Robots de equilibrio en dos ruedas...20
1.2.1.4.2. Robots de equilibrio en una rueda...20
1.2.1.4.3. Robots esféricos...20
1.2.1.4.4. El Caminar aplicado a los robots...20
1.2.1.4.6. El equilibrado dinámico (controlar cayendo)...21
1.2.1.4.7. Locomoción por salto...21
1.2.1.4.8. Locomoción por dinámica pasiva...22
1.2.1.5. La interacción del medio ambiente y la navegación...22
1.2.1.6. Interacción hombre- robot...22
1.2.1.6.1 El reconocimiento de voz...23
1.2.1.6.2. Voz robótica...23
1.2.1.6.3. Gestos Robóticos...23
1.2.1.6.4. Expresión facial...24
1.2.1.6.5. Emociones artificiales...24
1.2.1.6.6 Personalidad de los Robots...24
1.2.1.7. Dinámica y cinemática...25
1.2.2. El Proceso de enseñanza-aprendizaje...25
1.2.3. El proceso de enseñanza-aprendizaje en la robótica...26
1.2.3.1. Robots en el aula...27
1.3 Valoración Crítica de los conceptos principales de las distintas posiciones teóricas sobre la Robótica...27
Capítulo II. MARCO METODOLÓGICO...29
2.1. Caracterización del sector, rama, empresa, contexto institucionales o problema seleccionado para la investigación...29
2.2. Descripción del procedimiento metodológico para el desarrollo de la investigación...29
2.2.1. Modalidades de la Investigación...29
Cuantitativa...29
Cualitativa...30
2.2.2. Tipos de Investigación...30
Investigación de Campo...30
Investigación Correlacional...30
2.2.3. Métodos Aplicados...30
2.2.3.1. Métodos del nivel empírico del conocimiento...30
Observación Científica...30
Análisis Documental...31
Validación por expertos...31
2.2.3.2. Métodos del nivel teórico del conocimiento...31
Método analítico-sintético...31
Método inductivo-deductivo...31
Método Sistémico...31
2.2.4. Técnicas...32
Encuesta...32
2.2.5. Instrumentos...32
Cuestionario:...32
2.2.6. Metodología de Desarrollo de la Robótica...32
2.2.6.1. Análisis Orientada a procesos autómatas...32
2.2.6.2. Diseño de procesos robóticos...33
2.2.6.3. Construcción de prototipos...33
2.2.6.4. Refinamiento o rediseño de robot...33
2.2.6.5. Construcción del Robot...34
2.2.6. Población...34
2.2.6.1. Tamaño de la muestra...34
2.2.7. Análisis de la encuesta...35
¿Cómo calificaría la enseñanza de la materia de robótica en la Uniandes Tulcán?...35
2.4 Conclusiones parciales del capítulo...51
CAPÍTULO III. DESARROLLO DE LA PROPUESTA...52
3.1 Título de la propuesta...52
3.2 Caracterización de la propuesta...52
3.3 Planteamiento detallado de la propuesta...52
3.3.1. Análisis de los requerimientos...53
3.3.2. Requerimientos del nuevo Sistema...53
Hardware...53
Software...54
Plan de Bloque Curricular...55
Macro-Destrezas: Construcción del conocimiento científico: (Por favor remítase al apartado “3.3.3.1 Partes Electrónicas” del presente trabajo investigativo)...55
Objetivo del Bloque:...55
Ejes Institucionales:...56
Matriz de Consistencia...57
Ejemplo de Plan de Clase correspondiente al plan de bloque propuesto...61
3.3.3. Diseño de los Robots...64
3.3.3.1. Partes Electrónicas...65
Arduino Uno:...66
Arduino Nano:...66
Servomotor:...67
Controlador de motor L293D:...67
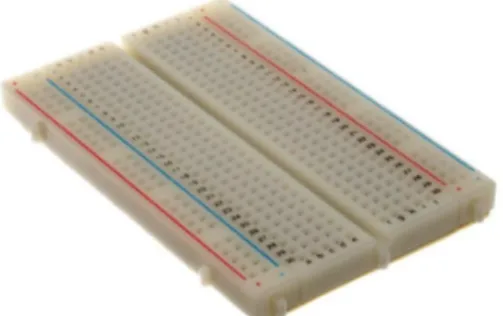
Breadboard:...68
Fotoresistencias:...68
Prototyping Shield:...69
Sensor HC-SR04:...69
Ubuntu, el robot que sigue la luz...70
Cableado de las fotoresistencias...70
Cableado del servomotor...70
La matemática detrás de la construcción de Ubuntu:...71
Linus, el robot que evita obstáculos...72
El entorno de desarrollo Arduino (Arduino IDE)...76
Escribiendo Sketches (bocetos)...76
Código de Ubuntu, el robot que sigue la luz...78
Código de Linus, el robot que evita obstáculos...80
3.3.4.1. Seguridades requeridas...84
3.3.4.2. Rutinas de Mantenimiento...84
3.3.5. Pruebas...84
3.3.5.1. Primera Prueba – Sensor Infrarrojo...84
3.3.5.2. Segunda Prueba – Controlador del motor L293D...85
3.3.5.3. Tercera Prueba – Test de funcionalidad integral...86
3.4. Validación de la Propuesta...87
Datos informativos del Primer experto :...88
Datos Informativos del Segundo experto:...88
Datos informativos de experto 3:...89
3.5. Resultados de la Validación de la Propuesta...89
3.6. Conclusiones Parciales del Capítulo III...94
Conclusiones Generales...94
Recomendaciones Generales...95
Índice de Tablas
Tabla 1; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...34
Tabla 2; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...34
Tabla 3; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...35
Tabla 4; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...36
Tabla 5; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...37
Tabla 6; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...37
Tabla 7; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...38
Tabla 8; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...39
Tabla 9; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...40
Tabla 10; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...41
Tabla 11; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...41
Tabla 12; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...42
Tabla 13; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...43
Tabla 14; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...44
Tabla 15; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...44
Tabla 16; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...45
Tabla 17; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...46
Tabla 18; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...47
Tabla 19; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...49
Tabla 20; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...56
Índice de Ilustraciones
Ilustración 1; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...35
Ilustración 2; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...36
Ilustración 3; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...37
Ilustración 4; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...38
Ilustración 5; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...39
Ilustración 6; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...40
Ilustración 7; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...41
Ilustración 8; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...42
Ilustración 9; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...42
Ilustración 10; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...43
Ilustración 11; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...44
Ilustración 12; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...45
Ilustración 13; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...46
Ilustración 14; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...47
Ilustración 15; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...48
Ilustración 16; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...49
Ilustración 17; Fuente: Investigación de Campo; Elaborado por: Diego Rosales...50
Ilustración 18, Fuente: duino-robotics. Autor: ChickenParmi...65
Ilustración 19, Fuente: duino-robotics.Autor: ChickenParmi...65
Ilustración 20; Fuente: duino-robotics; Autor: Reuters...66
Ilustración 21; Fuente: duino-robotics; Autor: Reuters...66
Ilustración 22; Fuente: duino-robotics; Autor: AP...66
Ilustración 23; Fuente: Investigación de campo; Autor: AP...67
Ilustración 24; Fuente: Investigación de campo. Autor: Diego Rosales...67
Ilustración 26; Fuente: Investigación de campo. Autor: Diego Rosales...68
Ilustración 27; Fuente: duino-robotics; Autor: AP...69
Ilustración 28; Fuente: Reuters; Autor: Anónimo...69
Ilustración 29; Divisor de voltaje con fotoresistencias Fuente: Investigación de campo Autor: Diego Rosales...70
Ilustración 30 Cableado de la fuente de poder y servomotores Fuente: Investigación de campo Autor: Diego Rosales...70
Ilustración 31; Fuente: Investigación de Campo; Autor: Diego Rosales...72
Ilustración 32; Fuente: Investigación de Campo; Autor: Diego Rosales...73
Ilustración 33; Fuente: Investigación de Campo; Autor: Diego Rosales...73
Ilustración 34; Fuente: Investigación de Campo; Autor: Diego Rosales...73
Ilustración 35; Fuente: Investigación de Campo; Autor: Diego Rosales...74
Ilustración 36; Fuente: Investigación de Campo; Autor: Diego Rosales...75
Ilustración 37; Fuente: Investigación de Campo; Autor: Diego Rosales...76
Ilustración 38; Fuente: Investigación de Campo; Autor: Diego Rosales...77
Ilustración 39; Fuente: Investigación de Campo; Autor: Diego Rosales...85
Ilustración 40; Fuente: Investigación de Campo; Autor: Diego Rosales...85
Ilustración 41; Fuente: Investigación de Campo; Autor: Diego Rosales...86
Ilustración 42; Fuente: Investigación de Campo; Autor: Diego Rosales...89
Ilustración 43; Fuente: Investigación de Campo; Autor: Diego Rosales...90
Ilustración 44; Fuente: Investigación de Campo; Autor: Diego Rosales...90
Ilustración 45; Fuente: Investigación de Campo; Autor: Diego Rosales...91
Ilustración 46; Fuente: Investigación de Campo; Autor: Diego Rosales...91
Ilustración 47; Fuente: Investigación de Campo; Autor: Diego Rosales...92
Ilustración 48; Fuente: Investigación de Campo; Autor: Diego Rosales...93
RESUMEN EJECUTIVO
El presente trabajo está completamente orientado a mejorar los procesos de enseñanza-aprendizaje de la materia de robótica mediante la implementación de robots autónomos controlados por sensores y otros recursos didácticos.
La línea de investigación reguladora del presente trabajo de tesis pertenece a la automatización, control y robótica presente en el manual de tesis de Uniandes 2013.
La presente trabajo investigativo sigue la estructura propuesta en el manual de tesis de Uniandes, dividida en tres capítulos, a continuación se da a conocer al aporte de cada uno de estos capítulos:
En el primer capítulo se plantea el problema fundamental de investigación, en base a él se establecen los demás aspectos de la investigación, aquí se encuentra también los objetivos y la justificación del problema.
En el segundo capítulo se desarrolla el marco metodológico y el planteamiento del problema al cual la investigación en las modalidades de campo y explicativa con la aplicación de métodos empíricos, analítico-sintéticos, inductivo-deductivos y sistémico pretende dar solución, como respaldo y verificación de la veracidad de la propuesta de solución se aplican técnicas de investigación como la entrevista a los estudiantes de la carrera de sistemas mercantiles de Uniandes Tulcán, incluyendo el respectivo análisis de datos arrojados por las encuestas para sintetizar conclusiones y recomendaciones que se verifican con la idea a defender.
En el tercer capítulo se elabora el esquema de la propuesta que consiste en el desarrollo de una microplanificación curricular orientada al bloque de construcción y diseño de autómatas aplicando métodos cognitivistas y constructivistas en la enseñanza; y la construcción de robots autónomos controlados por sensores, incorporando conclusiones generales, recomendaciones, bibliografía y anexos.
ABSTRACT
This work is entirely focused on improving the teaching/learning process of through the implementation of autonomous robots controlled by sensors, other teaching resources are used as well.
The current regulatory line of investigation belongs to automation, control and robotics present in the Uniandes 2013 thesis manual.
The present work tends to follow the structure proposed in the Uniandes thesis manual wich is divided into three chapters, the contribution of each of these chapters is socialized next :
In the first chapter the fundamental research problem arises , according to it the other aspects of the investigation are set , here is also the objectives and justification of the problem.
In the second chapter the methodological framework and approach to the problem to which research in the field and explanatory methods with the application of analytical - synthetic , inductive- deductive and empirical methods seeks to solve, for verification is developed the accuracy of the proposed solution applied research techniques such as interview to Uniandes students of commercial systems , including the analysis of data obtained from surveys to synthesize findings and recommendations will be verified with the idea to defend.
In the third chapter the outline of the proposal is the development of a curriculum oriented to micro building block design and implementing cognitivist and constructivist methods in teaching; and the construction of autonomous robots controlled by sensors , incorporating general conclusions , recommendations , bibliography and appendices .
INTRODUCCIÓN
Antecedentes de la Investigación
Dentro de la actual temática se encuentran los siguientes temas de tesis que sirven como un referente al actual trabajo:
González Espín, Cristian Paúl. Urrutia Goyes, Paúl Fernando (2006), “Diseño y construcción de un robot ápodo para tareas de exploración” Facultad de Ingeniería Electrónica. ESPE. Sede Sangolquí. Desarrollar e implementar un robot ápodo para explorar cualquier tipo de terreno. En este trabajo se aplica una de las finalidades más importantes de la robótica que es evitar exponer al humano a las diversas condiciones del terreno, y a los diversos peligros que pueda tener el ambiente en el cual se esté desenvolviendo, para la construcción del robot se usan módulos de funcionalidad.
Pumashunta Guisha Carlos Efraín; Villalba Jácome, Jefferson Rodrigo (2007), “Diseño y construcción de un robot explorador controlado mediante comandos de voz en forma remota que servirá como herramienta de limpieza de sistemas de aire acondicionado.” Facultad de Ingeniería, ESPE. Sede Latacunga. Diseñar y construir un robot explorador controlado mediante comandos de voz en forma remota que servirá como herramienta de limpieza de sistemas de aire acondicionado.
En este proceso se verifica la investigación necesaria a un proyecto de autómatas que interpretan comandos de voz de forma remota. y se muestran ideas para usar tarjetas de reconocimiento de voz como sensores. Debido a la envergadura de este autómata se usan los Microcontrolares tanto como maestro, como esclavos.
Planteamiento del problema
Es importante resaltar la creciente necesidad de trabajos de investigación de carácter tecnológico en la Uniandes, dentro de la carrera de sistemas informática de cualquier institución de formación de tercer nivel los proyectos de diseño y creación de autómatas siempre han sido de interés, pero esta temática presenta un especial reto al estudiante debido, en parte, a los siguientes problemas:
La falta de información acerca de cómo adquirir los materiales para el aprendizaje de robótica, que genera que los estudiantes no puedan proponer proyectos por la falta de acceso a los componentes electrónicos.
no disponga del material para facilitar su aprendizaje.
Las tecnologías que son vigentes en construcción de autómatas implican una pronunciada curva de aprendizaje y son muy variadas, tanto en el diseño, construcción y programación de los autómatas lo cual puede provocar frustración en el estudiante al no disponer de un punto de inicio claro.
El diseño y creación de robots a menudo implica la abstracción por parte de la persona que construye el robot de acuerdo a la funcionalidad que planea implementar, dicha abstracción es de carácter subjetivo y no siempre se implementan metodologías fijas, lo que provoca que el estudiante tenga dificultades en el momento de interpretar las decisiones técnicas, por sobre todo si el proyecto que se estudia es de gran envergadura.
De aquí se concluye que la construcción de robots autónomos controlados por sensores, puede facilitar el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas informáticos de Uniandes en la ciudad de Tulcán.
Formulación del problema
¿Cómo facilitar el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas informáticos de Uniandes en la ciudad de Tulcán.?
Delimitación del Problema Lugar
La presente investigación se llevará a cabo en la Universidad Regional Autónoma de los Andes, sede Tulcán.
Tiempo
La presente investigación, se la realizará en el período comprendido entre Marzo y Mayo del 2014.
Objeto de Investigación y Campo de Acción Objeto de Investigación:
Robótica
Campo de Acción: Autómatas Programables
El lineamiento bajo el cual esta desarrollado el presente trabajo es: Automatización y Control
Objetivos
Objetivo General:
Implementar robots autónomos controlados por sensores, que faciliten el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas informáticos de Uniandes en la ciudad de Tulcán.
Objetivos Específicos:
Fundamentar científicamente sobre robots autónomos controlados por sensores y el proceso de enseñanza aprendizaje.
Diagnosticar la situación actual de la implementación de robots autónomos controlados por sensores en la carrera de sistemas informáticos de Uniandes de la ciudad de Tulcán.
Determinar los elementos constitutivos del robots autónomos controlados por sensores.
Validar la propuesta mediante vía de expertos.
Idea a Defender
Con la implementación de robots autónomos controlados por sensores, se facilitará el proceso de enseñanza-aprendizaje de robótica en la carrera de sistemas informáticos de Uniandes en la ciudad de Tulcán.
Variable Independiente:
Robots autónomos controlados por sensores.
Variable Dependiente:
Procesos de enseñanza - aprendizaje de Robótica en la carrera de Sistemas Informáticos de Uniandes
Justificación del Tema
Ante el inconveniente que presenta para el proceso de enseñanza-aprendizaje de robótica, se pensó en la construcción de robots en la cual se transparenten los procesos de diseño, adquisición de los materiales, ensamblaje, pruebas y refinamiento de los robots.
Metodología a emplear Modalidad Cuantitativa.
Se verifica la utilidad de esta modalidad para representar variables discretas del presente estudio, para de esta manera, aplicando métodos estadísticos, se compruebe la vialidad del presente trabajo investigativo, de igual manera sirve para inferir la veracidad de los datos recabados, Münch Lourdes y Ángeles Ernesto (2009).
Modalidad Cualitativa.
En el presente trabajo es indispensable detallar de manera práctica cada uno de los aspectos visualizados y que son importantes para dictaminar un diagnóstico, con lo que se otorga a esta investigación la modalidad de cualitativa y por la facilidad de entendimiento que brinda para la fácil interpretación del problema objeto de investigación, (Bernal, 2006).
Tipos de Investigación Investigación de Campo
Se infiere la utilidad de la observación directa de la situación estudiada, por la necesidad de proporcionar una visión más amplia del problema planteado, Lourdes Münch (2009). De igual forma permite la aplicación de encuestas que son técnicas de campo y que a través del muestreo permite determinar generalidades acerca de la población, facilitando así la interpretación de la información recopilada.
Investigación Descriptiva
Se puede resaltar la aplicabilidad de la investigación descriptiva a lo largo del desarrollo del presente trabajo, pues contribuye a la explicación de las causas y efectos del problema estudiado, así mismo facilita la descripción de las ideas propuestas para alcanzar la situación deseada. Y cabe resaltar que sus principales fuentes eliminadas de información son la encuesta, la entrevista, la observación científica y la revisión documental, (Bernal 2006).
Investigación Correlacional
Esta modalidad de investigación es aplicable al momento de establecer nuestras variables de estudio, determinando el grado de relación de la variable dependiente a la independiente.
Se va a aplicar por la necesidad de utilizar técnicas propias de la investigación para determinar el problema y su naturaleza, así mismo en encontrar una solución al mismo.
Análisis Documental:
Se va a emplear la recolección de información mediante encuestas para recabar datos sobre el problema planteado, así mismo es necesario realizar entrevistas a autoridades que justifiquen la existencia del problema y el impacto de éste en la institución.
Validación por expertos:
Su utilización se verá reflejada en la presentación del presente trabajo a tres expertos en esta especialidad para determinar su viabilidad.
Métodos Teóricos
Método analítico sintético:
Se aplicará este método puesto que en varias oportunidades durante el desarrollo de la tesis, la solución al problema planteado no siempre es trivial, entonces es necesario realizar un análisis de la partes que componen el problema con la intención de encontrar la solución más viable, que es actualmente en la idea a defender.
Método inductivo-deductivo:
Este método se aplicará en la interpolación y extrapolación de los datos recabados con la finalidad de establecer una solución adecuada al problema y extenderla a otras aplicaciones similares a este trabajo de investigación.
Método Sistémico:
Durante el desarrollo de la tesis cada parte de ella interactuará con otras partes constitutivas, estableciendo un sistema de procedimientos que conducen a la alternativa de solución más viable a la problemática tratada, integrando todas la partes de la tesis en un sistema computacional.
Técnicas Encuesta:
El objetivo de su aplicación está reflejado en la confiabilidad de la información, un aspecto que es de gran importancia a la hora del planteamiento de las preguntas es definir la relación que estas tengan con las variables e indicadores que sean objeto de investigación.
La aplicación de este instrumento proporciona al investigador la facilidad de identificar las áreas críticas o las variables en las cuales se va a enfocar el estudio y planteamiento de la propuesta.
Metodología de Desarrollo de la Robótica.
La metodología de desarrollo de la robótica a emplear es la orientada a automatización y control, con la cual se pretende abarcar cada una de las etapas implementación de los robots, la cual consta de las siguientes partes:
Análisis Orientada a procesos autómatas
Porque propone un análisis de las partes necesarias para abarcar la funcionalidad que se le pretende dar al robot, es decir, de los componentes mecánicos eléctricos y electrónicos necesarios para que el robot perciba su entorno, genere un estímulo y responda de la manera adecuada. De igual manera, la metodología es útil cuando se pretende saber qué entornos de desarrollo son necesarios para programar los componentes electrónicos en tiempo real en base a procesos secuenciales.
Diseño de procesos robóticos
Se usa puesto que una vez que se tiene la idea de la funcionalidad del robot y los implementos necesarios para construirlo, es necesario reconocer cómo hacerlo realidad, esto se puede lograr mediante maquetas, bocetos o herramientas CAD con la intención de prever detalles que facilitará la posterior construcción del robot y permitirá contar con una idea de la apariencia final del autómata.
Construcción de prototipos
Esta etapa en el proceso de desarrollo es útil puesto que la mejor manera de saber si un diseño funcionará en las condiciones del mundo real es construyendo un prototipo. Un prototipo es un modelo fiel del diseño final. Hay que evaluar el coste, la durabilidad, facilidad de construcción, la estética y si cumple los criterios de la fase de diseño.
Refinamiento o rediseño de robot
Es aplicable porque si un diseño inicial y el prototipo no solventan el problema en su totalidad, supera el coste previsto o no cumple las especificaciones, el diseñador puede volver atrás en el proceso y plantear otros modelos que intenten mejorar el anterior. A veces la principal limitación para refinar/rediseñar el prototipo es el dinero. Quizás es preferible escoger un diseño inferior que volver a desarrollar un nuevo modelo.
Es aplicable en el contexto de que el proceso de construcción es lento y complejo. Hay que tener en cuenta los materiales, herramientas, procesos, limitaciones y coste. Proporcionando siempre la documentación necesaria en los procesos de ensamblado y codificación.
Estructura de la Tesis. Introducción
Antecedentes de la Investigación.
Situación Problémica
Problema Científico
Objeto de Investigación y Campo de Acción.
Identificación de la Línea de Investigación.
Objetivos.
Objetivo General.
Objetivos Específicos.
Idea a Defender
Variable Independiente
Variable Dependiente
Tipos de Investigación
Resumen de la Estructura de la Tesis.
Elementos de novedad, aporte teórico y significación practica.
Capítulo I. Marco Teórico.
En este capítulo se analizan todas las teorías utilizadas para la elaboración de la presente tesis de grado.
Capítulo II. Marco Metodológico Planteamiento de la Propuesta.
Capítulo III. Desarrollo de la Propuesta.
En este capítulo se detalla como está elaborado el Robot, así como las respectivas pruebas del mismo.
Conclusiones Generales.
Recomendaciones.
Bibliografía.
Elementos de novedad, aporte teórico y significación práctica. Aporte Teórico
Se aporta a la bibliografía disponible en la temática con conceptos relacionados con el diseño y construcción de robots autónomos, sintetizando información útil desde diferentes fuentes, dicha información será interpretada y puesta a disposición de cualquier interesado.
Significación Práctica
La actual investigación propone todos los fundamentos necesarios en el diseño y construcción de robots autónomos, orientada principalmente a estudiantes que les permitirá profundizar más acerca de esta temática y que de cierta manera facilite el proceso de enseñanza - aprendizaje promoviendo el interés sobre el campo de la robótica.
Novedad
Las tesis de grado de robótica que se han abordado en la carrera de sistemas informáticos en la Uniandes, sede Tulcán, han sido cuidadosamente escogidos principalmente por su significación práctica, pero un proceso pedagógico que facilite el aprendizaje de la creación de autómatas puede significar especial interés debido a la manera sistematizada de presentar información al estudiante interesado, los medios para obtenerla, la información detallada en el diseño y la construcción e información del código fuente usado para el comportamiento del robot.
Capítulo I. MARCO TEÓRICO 1.1. Origen y evolución de la robótica
La palabra robótica fue usado por primera vez, en un medio impreso por Isaac Asimov, en su cuento corto de ciencia ficción “Liar!”, publicado en Mayo de 1941(Diccionario de Inglés Oxford, 2009). Se presume que Asimov al pensar que ciencia y tecnología de dispositivos eléctricos es “electrónica”, “robótica” haría referencia a la ciencia y tecnología de los robots.
Desde siempre, las personas han querido desarrollar seres animados con diferentes fines. Este deseo de dar vida, conjugado con el progreso mecánico, científico, tecnológico y electrónico a lo largo de la historia, dio lugar a la creación de los autómatas, máquinas que imitan la figura y los movimientos de un ser animado, antecedente directo de los robots.
Los primeros autómatas se remontan a la Antigüedad: egipcios y griegos fueron pioneros en el desarrollo de la mecánica y la ingeniería. Conocían y utilizaban a la perfección principios mecánicos como la rueda, el eje, la cuña, la palanca, el engranaje, la rosca y la polea, elementos que constituyen la base de muchos mecanismos empleados en la actualidad. Tenían también un profundo conocimiento de hidráulica y neumática, que usaban para dar movimiento a algunas estatuas.
En el siglo I d. C., Herón de Alejandría escribió el primer tratado de robótica, Los autómatas, y creó los primeros autómatas: el teodolito, un aparato que medía ángulos, distancias y desniveles, y el odómetro, que medía distancias recorridas.
Durante la Edad Media, dos personajes se destacaron por sus invenciones. Alberto Magno (1206-1280) creó un autómata de hierro que le servía como mayordomo, podía caminar, abrir puertas y comunicarse con los invitados, y una cabeza parlante que predecía el futuro. Al-Jazari, uno de los más grandes ingenieros de la historia, inventó un reloj elefante, con seres humanos y animales mecánico.
El Renacimiento fue un período rico en pensadores e invenciones. El enorme interés por la investigación en el campo de las ciencias que explican al mundo y al ser humano impulsó el desarrollo de espectaculares maquinarias.
Leonardo Da Vinci (1452-1519), quizás el más grande inventor de todos los tiempos, creó, entre otras, la máquina de volar. El matemático y filósofo Blaise Pascal (1623-1662), un destacado representante del racionalismo, inventó la primera máquina de calcular. Durante la misma época, la corriente de pensamiento de René Descartes (1596-1650) se sostuvo en el postulado de que todo se explica a través de las matemáticas.
su parte, el ingeniero e inventor Jacques de Vaucanson (1709-1782) creó un pato artificial que movía las alas y realizaba el proceso digestivo completo, y dos músicos autómatas: El flautista y el tamborilero, que podían tocar un amplio repertorio musical.
Hasta el siglo XVIII, se había instalado cierto optimismo respecto del bienestar y progreso socio-económicos que el desarrollo de as maquinarias traería aparejado. Sin embargo, a partir de la Revolución Industrial, los aspectos positivos asociados a este paradigma comienzan a ser cuestionados: las máquinas empiezan a reemplazar y ya no tanto a aliviar la mano de obra. También el medioambiente se ve notablemente perjudicado, pues este nuevo modelo económico requiere de la explotación de recursos naturales para sostenerse.
En 1929, con la crisis mundial derivada de la caída de Wall Street, la sociedad se vuelve pesimista y es cada vez más crítica respecto del avance tecnológico y el sistema industrial. Además, la Primera y la Segunda Guerra Mundial ponen de manifiesto el carácter destructivo que se da al uso de la tecnología.
En la actualidad, las opiniones están encontradas y el espectro es muy amplio: desde las sociedades consumistas, adictas al uso de artefactos que parecieran cumplir infinitas funciones, hasta la tendencia a volver a las viejas costumbres, como promueven los impulsores de la slow-life o vida lenta.
¿De qué manera se podrían encauzar las actividades científicas para garantizar el bienestar de las personas y evitar el control de sus actos? (Riccillo Marcela, 2009, Pág 43).
La situación es compleja: por un lado, tenemos la sensación de que la evolución tecnológica cumplirá todos nuestros deseos; por el otro, nos produce sentimientos de control social o de dependencia absoluta, algo por completo ajeno al deseo humano.
La robótica juega un papel central dentro del campo de las investigaciones científicas. Sus objetivos actuales son obtener prototipos que nos asistan, alivien nuestras labores y nos brinden una agradable compañía. Hasta ahora, el desarrollo de estos experimentos parecería propiciar el bienestar social.
Investigación Robótica
Gran parte de la investigación en robótica no se centra en tareas industriales específicos, sino en la investigación de nuevos tipos de robots, maneras alternativas de pensar o de diseño y nuevas maneras de fabricarlos, pero otras investigaciones , como proyecto cyberflora del MIT , es casi en su totalidad académico.
La primera gran innovacion en cuanto al diseño es el proyecto de robot OpenSourcing. Para describir el nivel de avance de un robot, se usa el término “Generación de Robots”. Este término es acuñado por el Profesor Hans Moravec, Científico Principal de Investigación en el Instituto de Robótica de la Universidad Carnegie Mellon en la descripción de la evolución futura de la tecnología robótica. La primera generación de robots, predijo Moravec en 1997, deben tener una capacidad intelectual comparable a quizás un lagarto y debería estar disponible en 2010 pero el robot sería incapaz de aprender, sin embargo , Moravec predice que el robot de segunda generación sería una mejora sobre el primero y estarían disponibles para el año 2020, con la inteligencia tal vez comparable a la de un ratón. El robot tercera generación debe tener la inteligencia comparable a la de un mono. Y los robots de cuarta generación, robots con inteligencia humana (Moraevec Hans, 1997), que no ocurrirían antes de 2040 o 2050.
industria manufacturera.
1.2. Análisis de las distintas posiciones teóricas de la robótica 1.2.1. Robótica
La robótica es la ciencia que estudia el diseño y la implementación de robots, conjugando múltiples disciplinas, como la mecánica, la electrónica, la informática, la inteligencia artificial y la ingeniería de control, entre otras.(Moraevec Hans, 1997, Pag 12)
Para definirlo en términos generales, un robot es una máquina automática o autónoma que posee cierto grado de inteligencia, capaz de percibir su entorno y de imitar de terminados comportamientos del ser humano. Los robots se utilizan para desempeñar labores riesgosas o que requieren de una fuerza, velocidad o precisión que está fuera de nuestro alcance. También existen robots cuya finalidad es social o lúdica.
Los robots se usan en diversos ámbitos y para cumplir tareas variadas: desde los brazos robóticos utilizados en la industria automotriz hasta el novedoso sistema quirúrgico Da Vinci, que permite practicar cirugías de alta complejidad poco invasivas y con una precisión sin precedentes; desde los robots espaciales diseñados para explorar la superficie de planetas desconocidos hasta la aspiradora doméstica Roomba, que realiza la limpieza de manera autónoma, o el Nano colibrí, un pájaro utilizado para espionaje militar.
Pero quizá los más llamativos sean los androides, que imitan la morfología, el comportamiento y el movimiento de los seres humanos. Uno de los más conocidos en la actualidad es ASIMO, pensado para llevar a cabo labores asistenciales y sociales. Aunque se encuentra en una etapa experimental, ASIMO es capaz de caminar o subir escaleras por sí solo.
1.2.1.1. Control de los robots
La estructura mecánica de un robot debe ser controlada para realizar tareas. El control de un robot consiste en tres fases distintas: percepción, procesamiento y acción (paradigmas robóticos). Los sensores proporcionan información sobre el medio ambiente o el propio robot (por ejemplo, la posición de sus articulaciones o su efector final). Esta información es procesada a continuación para calcular las señales apropiadas a los actuadores (motores) que mueven la mecánica (Moraevec Hans, 1997, Pag 145) .
. La fusión del sensor puede primero ser utilizado para estimar los parámetros de interés (por ejemplo, la posición de la pinza del robot) a partir de datos de sensores ruidosos. Una tarea inmediata (como mover la pinza en una dirección determinada) se infiere de estas estimaciones. Las técnicas de la teoría de control convierten la tarea en comandos que impulsan los actuadores.
En escalas de tiempo más largas o con tareas más sofisticadas, el robot puede tener que construir razonar con un modelo "cognitivo". Los modelos cognitivos tratan de representar el robot, el mundo, y cómo interaccionan. El reconocimiento de patrones y el sensor de visión pueden ser usados para rastrear objetos. Técnicas de mapeo pueden ser utilizados para construir mapas del mundo. Por último, la planificación de movimiento y otras técnicas de inteligencia artificial se pueden utilizar para encontrar la manera de actuar. Por ejemplo, un robot con sensores infrarrojos puede encontrar la manera de lograr una tarea sin chocar con obstáculos, o caerse , etc
1.2.1.2. Niveles de autonomía
Los sistemas de control también tiene diferentes niveles de autonomía .
• La interacción directa se utiliza para los dispositivos hápticos o teleoperados, y el ser humano tiene un control casi total sobre el movimiento del robot.
• Los modos de operación asistidos tienen una persona encargada de realizar los
comandos a nivel medio o bajo, y el robot sabe como interpretar dichos comandos y realizarlos.
• Los robot autónomo puede trabajar por largos períodos de tiempo sin la interacción humana. Los mayores niveles de autonomía no necesariamente requieren capacidades cognitivas más complejas. Por ejemplo, los robots en plantas de ensamblaje son completamente autónomos, pero operan en un patrón fijo .
Otra clasificación tiene en cuenta la interacción entre el control humano y los movimientos de la máquina .
• Teleoperación: Un humano controla cada movimiento, cada cambio de actuador de la máquina se especifica por el operador.
• Supervisión: Un humano especifica movimientos generales o cambios de posición y el equipo decide los movimientos específicos de sus actuadores.
1.2.1.3.1 Fuente de poder.
En el presente, la mayoría de las baterías usadas como fuente de poder son plomo-ácido. Muchos tipos de baterías pueden ser usadas como fuente de poder para roobots. Desde las baterías plomo-ácido que son más seguras y tienen una vida relativamente larga, pero que son más pesadas, a las baterías de cadmio, más pequeñas en volumen pero actualmente más costosas.(Moraevec Hans, 1997, Pag 156). El diseño de un robot impulsado por baterías debe tomar en cuenta factores como la seguridad, tiempo de vida y el peso. Los generadores que ofrecen algún tipo de motor de combustión interna también pueden ser usados. Sin embargo, estos diseños son mecanicamente complejos y necesitan de combustible, disipación de color y son generalmente pesados. Una conexión externa a una fuente de alimentación externa eliminaría la necesidad de un suministro de poder. Esto tiene la ventaja de ahorrar espacio y peso, removiendo la generación de poder y el almacenamiento de componentes. Sin embargo, este diseño conlleva la desventaja de siempre necesitar de un cable conectado al robot, lo cual puede ser difícil. También pueden ser potenciales fuentes de energía:
Neumáticos(gases comprimidos).
Hidráulicos (líquidos).
Almacenes de energía rotacional (que trabajan almacenando energía como energía rotacional de una hélice).
Depósitos de desechos orgánicos (a través de digestión anaeróbica)
Heces (humanas o animales); que pueden ser interesantes en el contexto militar dado que la heces de un pequeño grupo de soldados pueden ser rehusadas para los requerimientos de los famosos drones de guerra creados por el ejército estadounidense.
1.2.1.3.2. Actuadores.
Son como los músculos del robot, las partes que convierten la energía almacenada en movimiento. Por mucho los actuadores más famosos son los motores eléctricos que giran en torno a una rueda o engrane, y los actuadores lineales que controlan a robots indsutriales en fábricas, los cuales se mueven afuera y adentro en lugar de rotar, impulsados por lo general por aire comprimido. Pero últimamente han habido bastantes avances en tipos alternativos de actuadores, impulsados por electricidad, químicos.
La mayoría de robots usan motores eléctricos de corriente contínua, o motores de corriente alterna en robots industriales. Estos motores son preferidos en sistemas con cargas más ligeras y donde el movimiento predominante es el rotacional.
1.2.1.3.4. Actuadores elásticos.
Un resorte puede ser diseñado como parte de un motor actuador para permitir un mejor control de fuerza, por lo que ha sido usado en varios tipos de robots, en especial robots humanoides que caminan.
1.2.1.3.5. Músculos de cable.
También conocidos como Aleación con memoria de la forma, cables Nitinol o Flexinol, es un material que se contrae ligeramente (por lo general por debajo del 5%) cuando la electricidad fluye a través de él. Estos han sido usados en aplicaciones de robots pequeños.
1.2.1.3.6. Músculos de Aire o Músculos artificiales neumáticos.
Los músculos artificiales neumáticos, también conocidos como músculos de aire, son tubos especiales que se contraen(normalmente hasta un 40%) cuando el aire es forzado dentro de ellos. Se han utilizado para algunas aplicaciones de robótica
1.2.1.3.7 Polímeros electroactivos.
Son un nuevo material de plástico que puede contraerse considerablemente (hasta 380% de deformación) cuando le fluye electricidad, y se han utilizado en los músculos faciales y los brazos de robots humanoides.
1.2.1.3.8. Motores Piezoeléctricos
Alternativas recientes a motores de corriente continua son motores piezoeléctricos o los motores ultrasónicos. Estos funcionan en un principio fundamentalmente distinto, los elementos piezoeléctricos diminutos vibran miles de veces por segundo, provocando un movimiento lineal o rotativo. Hay diferentes mecanismos de operación; un tipo utiliza la vibración de los elementos piezoeléctricos para mover el motor en un círculo o en línea recta. Otro tipo utiliza los elementos piezoeléctricos para hacer vibrar a una tuerca y hacer girar al tornillo. Las ventajas de los motores está en su resolución nanométrica, la velocidad y la fuerza disponible para su tamaño. Estos motores ya están disponibles comercialmente.
1.2.1.3.9. Nanotubos Elásticos
deformarse elásticamente por varios puntos porcentuales, con los niveles de almacenamiento de energía de tal vez 10 J/cm3 para nanotubos de metal . Los bíceps Humanos podrían ser reemplazados con un alambre de diámetro 8 mm de este material. Este musculo compacto podría permitir que los robots del futuro salten y corran más agilmente que los humanos.(Moraevec Hans, 1997, Pag 178).
1.2.1.3.10 Sensores
Los sensores permiten a los robots recibir información de una cierta medición del medio ambiente o de los componentes internos del robot. Esto es esencial para los robots en la realización de sus tareas, actúan sobre cualquier cambio en el medio ambiente y genera el cálculo de la respuesta apropiada. Se utilizan para diversos tipos de mediciones , para dar a los robots advertencias de seguridad o de mal funcionamiento, y para proporcionar información en tiempo real de la tarea que está realizando.
1.2.1.3.11. Sensores de Tacto.
Las manos robóticas y prótesis actuales reciben mucha menos información táctil que la mano humana. Aunque investigaciones recientes han desarrollado un conjunto de sensores táctiles que imita las propiedades mecánicas y de los receptores del tacto de los dedos humanos. El conjunto de sensores se construye como un núcleo rígido rodeado de fluido conductor que figuran por una piel elastomérica. Los electrodos están montados en la superficie rígida y están conectados a un dispositivo de medición de impedancia dentro del núcleo. Cuando la piel artificial toca un objeto la trayectoria de fluido alrededor de los electrodos es deformada , produciendo cambios de impedancia que se asignan las fuerzas recibidas desde el objeto . Los investigadores esperan que una aplicación importante de estos dedos artificiales será el agarre robótico de objetos.
Científicos de varios países europeos e israelíes desarrollaron una prótesis de mano en el 2009 , llamado SMARTHAND, que funciona como una mano de verdad, lo que permite a los pacientes con manos amputadas escribir en un teclado, tocar el piano y realizar otros movimientos finos. La prótesis tiene sensores que permiten al paciente sentir verdaderamente sus yemas de los dedos.
1.2.1.3.12 Sensores de Visión
En la mayoría de las aplicaciones prácticas de visión por ordenador, los ordenadores están preprogramados para resolver una tarea en particular , pero los métodos basados en el aprendizaje se están convirtiendo cada vez más común .
Los sistemas de visión por ordenador se basan en sensores de imagen que detectan la radiación electromagnética que se encuentra normalmente en la forma de luz visible o luz infrarroja . Los sensores están diseñados utilizando la física del estado sólido. El proceso por el que la luz se propaga y se refleja en las superficies se explica el uso de la óptica. Sensores de imagen sofisticados requieren incluso mecánica cuántica para proporcionar una comprensión completa del proceso de formación de la imagen . Los robots también se pueden equipar con múltiples sensores de visión para ser más capaces de calcular la sensación de profundidad en el medio ambiente. Al igual que los ojos humanos, los "ojos " robots " también deben ser capaces de centrarse en un área particular de interés , así como adaptarse a las variaciones en la intensidad de la luz . Hay un subcampo dentro de la visión por ordenador , donde los sistemas artificiales están diseñados para imitar el procesamiento y el comportamiento de sistema biológico en diferentes niveles de complejidad. Además, algunos de los métodos basados en el aprendizaje desarrolladas en la visión por computador tienen sus antecedentes en la biología.
1.2.1.3.13 Sensores de Manipulación
Los robots tienen que manipular objetos; recoger , modificar, o de ejercer un efecto en otro objeto. A menudo, las manos de un robot se les llama efectores finales, mientras que el "brazo" se conoce como un manipulador. La mayoría de los brazos de robot tienen efectores reemplazables , lo que les permite realizar una pequeña gama de tareas. Algunos tienen un manipulador fijo que no puede ser reemplazado , mientras que unos pocos tienen un manipulador de propósito general, por ejemplo una mano humanoide.
1.2.1.3.14 Pinzas Mecánicas
Uno de los efectores más comunes es la pinza . En su manifestación más simple consiste en sólo dos dedos que se pueden abrir y cerrar para recoger y dejar de lado una serie de pequeños objetos. Los dedos pueden ser de una cadena con un tendido de cables de metal a través de él .
1.2.1.3.15 Garra de vacío
La Garra de vacío son dispositivos muy simples, pero pueden sostener cargas muy grandes siempre y cuando la superficie de prensión sea lo suficientemente amplia y no porosa como para asegurar la succión.
1.2.1.4. Locomoción de robots
Por lo general, la mayoría de los robots móviles tienen cuatro ruedas. Algunos investigadores han tratado de crear robots con sólo una o dos ruedas . Estos pueden tener ciertas ventajas , tales como una mayor eficiencia y partes reducidas, así como permitir que un robot navegar en lugares confinados donde un robot de cuatro ruedas no sería capaz de llegar.
1.2.1.4.1. Robots de equilibrio en dos ruedas
Los robots de equilibrio general, utilizar un giroscopio para detectar cuándo un robot se está cayendo y gira las ruedas en la dirección opuesta, para contrarrestar la caída, cientos de veces por segundo, asemejando a la dinámica de un péndulo invertido. Un ejemplo es el Segway (caminadores eléctricos)aunque no es comúnmente considerado como un robot, sino como un componente de robot, cuando se usa como tal Segway se refieren a ellos como RMP ( Robotic Mobility Platform ).
1.2.1.4.2. Robots de equilibrio en una rueda.
Un robot de equilibrio de una rueda es una extensión de un robot de equilibrio de dos ruedas de manera que pueda moverse en cualquier dirección 2D usando una bola redonda como su única rueda . Varios robots de equilibrio de una sola rueda que han sido diseñadas recientemente, como el “Ballbot” de la Universidad Carnegie Mellon que tiene la altura y ancho aproximado de una persona. Debido a la forma larga y delgada tienen la capacidad para maniobrar en espacios reducidos, y también tienen el potencial de funcionar mejor que otros robots en entornos con gente.
1.2.1.4.3. Robots esféricos
Se han hecho varios intentos de que el robot esté completamente dentro de una bola esférica, ya sea haciendo girar un peso dentro de la bola, o mediante la rotación de las capas exteriores de la esfera. También son conocidos como robots orbe o bot pelota.
1.2.1.4.4. El Caminar aplicado a los robots
hecho que tan robustos como un ser humano. Ha habido muchos estudios inspirados en humanos, como el del laboratorio AMBAR que fue establecido en 2008 por el Departamento de Ingeniería Mecánica de la Universidad de Texas A & M University. Se han construido muchos robots que implementan el caminar en más de dos piernas, debido a que estos robots son significativamente más fácil de construir. Los robots caminantes pueden ser usados en terrenos desiguales, puesto que proporcionan movilidad y una mejor eficiencia energética que otros métodos de locomoción . Los híbridos también se han propuesto en películas como Yo , Robot, donde caminan en 2 patas y cambian a 4 (brazos + piernas). Normalmente, los robots en 2 piernas pueden caminar bien en un suelo plano y en ocasiones pueden subir las escaleras. Pero ninguno puede caminar sobre terreno rocoso desigual. Algunos de los métodos que se han probado son: Técnica ZMP, que se trata con más detalle a continuación.
1.2.1.4.5. Técnica ZMP
El Punto de momento cero (ZMP) es el algoritmo utilizado por los robots como ASIMO de Honda. El ordenador a bordo del robot trata de mantener las fuerzas totales de inercia (la combinación de la gravedad de la Tierra y de la aceleración y desaceleración de la marcha), exactamente con la oposición de la fuerza de reacción baja (la fuerza del suelo empujando hacia atrás en el pie del robot). De esta manera, las dos fuerzas se anulan, anulando el momento (fuerza que causa el robot girar y caer). Sin embargo , esto no es exactamente cómo camina un ser humano, y la diferencia es obvia para los observadores humanos, hay quienes afirman que ASIMO camina como si necesitara ir al baño. El algoritmo para caminar de ASIMO no es estático, y se utiliza un poco de equilibrio dinámico (véase más adelante). Sin embargo, todavía se requiere una superficie lisa para caminar.
1.2.1.4.6. El equilibrado dinámico (controlar cayendo)
Una forma más avanzada para un robot a caminar es el uso de un algoritmo de equilibrio dinámico, que es potencialmente más robusta que la técnica ZMP, ya que monitorea constantemente el movimiento del robot, y coloca los pies con el fin de mantener la estabilidad. Esta técnica fue demostrada recientemente por Anybots' Dexter Robot, que es tan estable que incluso puede saltar.
1.2.1.4.7. Locomoción por salto.
pierna, y una parte muy pequeña de pie, podría mantenerse en pie simplemente saltando. El movimiento es el mismo que el de una persona en un palo de pogo. Cuando el robot cae a un lado, salta ligeramente en esa dirección, con el fin de atrapar equilibrarse. Pronto, el algoritmo se generalizó a dos y cuatro patas . Los robot bípedos pudieron correr e incluso realizar saltos mortales. Los cuadrúpedos también podía trotar y correr. Para una lista completa de estos robots , consulte la página del MIT correspondiente a Laboratorios de Robótica.
1.2.1.4.8. Locomoción por dinámica pasiva.
Tal vez el enfoque más prometedor utiliza la dinámica pasiva en la cual se utiliza el impulso de las extremidades de balanceo para una mayor eficiencia. Se ha demostrado que los mecanismos de humanoides totalmente sin motor pueden caminar por una pendiente suave , utilizando sólo la gravedad para impulsarse. Usando esta técnica, un robot sólo necesita suministrar una pequeña cantidad de potencia del motor a caminar a lo largo de una superficie plana o un poco más al subir una pendiente. Esta técnica promete hacer robots andantes al menos diez veces más eficiente que los caminantes ZMP , como ASIMO .
1.2.1.5. La interacción del medio ambiente y la navegación
Aunque un porcentaje significativo de los robots en funcionamiento son humanamente controlados, u operan en un entorno estático, hay un creciente interés en los robots que pueden funcionar de forma autónoma en un entorno dinámico. Estos robots requieren alguna combinación de hardware y software de navegación con el fin de atravesar su entorno . En particular, los acontecimientos imprevistos (por ejemplo, las personas y otros obstáculos que no son estacionarios ) pueden causar problemas o colisiones,como es el caso de algunos robots altamente avanzados como ASIMO. Además, los coches auto-controlados, los coches sin conductor de Ernst Dickmann, y los robots inscritos en el DARPA Grand Challenge, son capaces de detectar el medio ambiente y así y, posteriormente, tomar decisiones de navegación basados en esta información. La mayoría de estos robots emplean un dispositivo GPS de navegación con puntos de referencia, junto con el radar , a veces combinado con otros datos sensoriales como el LIDAR , cámaras de video y sistemas de guía inercial para una mejor navegación entre los puntos de control.
1.2.1.6. Interacción hombre- robot
trabajo, y sobre todo cómo se les dirá que paren de realizar la tarea actual. Las personas que interactúan con ellos pueden tener poca o ninguna formación en robótica, por lo que cualquier interfaz tendrán que ser extremadamente intuitiva. Autores de ciencia ficción también suelen asumir que los robots con el tiempo será capaz de comunicarse con los seres humanos a través del habla, gestos y expresiones faciales, en lugar de una interfaz de línea de comandos. Aunque el habla sería la forma más natural para el ser humano para comunicarse, no es natural para el robot. Probablemente pasará mucho tiempo antes de que los robots interaccionen tan naturalmente como el ficticio C-3PO de la Guerra de las Galaxias.
1.2.1.6.1 El reconocimiento de voz
Interpretar el flujo continuo de sonidos provenientes de un ser humano, en tiempo real, es una tarea difícil, sobre todo debido a la gran variabilidad de expresión. La misma palabra , hablada por la misma persona puede sonar diferente dependiendo de la acústica , el volumen, la palabra anterior, si el hablamte tiene un resfriado, etc . Esto se vuelve aún más difícil cuando el que habla tiene un acento diferente. Sin embargo , grandes avances se han hecho en el campo desde que Davis , Biddulph , y Balashek diseñaron el primer “sistema de entrada de voz”, que reconoce “diez dígitos hablados por un solo usuario con un 100 % de precisión”(Davis Mark, 1952). En la actualidad, los mejores sistemas pueden reconocer el habla continua , natural, de hasta 160 palabras por minuto, con una precisión de 95 %, como es el caso de la interfaz del teléfono Motorola, el Moto X que incluye un procesador que siempre está escuchando.
1.2.1.6.2. Voz robótica
Existen otros obstáculos al permitir que el robot utiliza la voz para interactuar con los humanos. Por razones sociales, la voz sintética resulta subóptima como medio de comunicación, por lo que es necesario desarrollar el componente emocional de la voz robótica a través de diversas técnicas que están actualmente en desarrollo.
1.2.1.6.3. Gestos Robóticos
robots en un futuro cercano.
1.2.1.6.4. Expresión facial
Las expresiones faciales pueden proporcionar una rápida retroalimentación sobre el avance de un diálogo entre dos seres humanos, y puede ser capaz de hacer lo mismo con los seres humanos y robots. Algunas caras robóticas que han sido construidos por Hanson Robotics usando su polímero elástico llamado Frubber, permiten un gran número de expresiones faciales debido a la elasticidad del recubrimiento facial de caucho y motores del subsuelo incrustados (servos). El recubrimiento y los servos se construyen sobre una cráneo del metal . Un robot debe saber cómo acercarse a un ser humano, y ser capaz de usar un lenguaje de expresiones y juzgar el lenguaje de expresión facial. De esta manera, la persona recibirán el tipo de interacción esperada del robot. En este campo de estudio de la robótica se han desarrollado robots como Kismet y la adición más reciente, Nexi que pueden producir un determinada gama de expresiones faciales, lo que les permite mantener mantener intercambios sociales significativos con los seres humanos.
1.2.1.6.5. Emociones artificiales
Las emociones artificiales también se pueden generar, componiendo secuencias de expresiones y / o gestos faciales. Como se puede ver en la película Final Fantasy : La fuerza interior, donde la animación en 3d logra recrear con cierto grado de exactitud las expresiones humanas, pero evidenciando como la programación de estas emociones artificiales es complejo y requiere una gran cantidad de la observación humana. Para simplificar esta programación en la película , capturas de movimiento se generaron con un programa de software especial. Esto disminuyó la cantidad de tiempo necesario para hacer la película. Estas capturas de movimiento posiblemente podrían ser transferidos para su uso en robots reales.
1.2.1.6.6 Personalidad de los Robots
1.2.1.7. Dinámica y cinemática
El estudio del movimiento se puede dividir en cinemática y dinámica. La cinemática directa se refiere al cálculo de la posición de efector del extremo, orientación, velocidad y aceleración cuando se conocen los valores conjuntos correspondientes . La cinemática inversa se refiere al caso opuesto en que se requiere valores conjuntos para calcular los valores de efectores finales, como se hace en la planificación de ruta. Algunos de los aspectos especiales de la cinemática incluyen el manejo de la redundancia (diferentes posibilidades de realizar el mismo movimiento), la prevención de colisiones, y el evitamiento de singularidades. Una vez que todas las posiciones relevantes , velocidades y aceleraciones se han calculado utilizando la cinemática, se usan métodos correspondientes al campo de la dinámica para estudiar el efecto de las fuerzas sobre estos movimientos. La dinámica directa se refiere al cálculo de aceleraciones en el robot una vez que se conocen las fuerzas aplicadas. Se utilizan en las simulaciones por ordenador del robot. La dinámica inversa se refiere al cálculo de las fuerzas de accionamiento necesarias para crear una aceleración al efector final. Esta información puede utilizarse para mejorar los algoritmos de control de un robot .
En cada área que se ha mencionado anteriormente, los investigadores se esfuerzan por desarrollar nuevos conceptos y estrategias, mejorar las existentes, y mejorar la interacción entre ellas. Para ello, los criterios óptimos de rendimiento, optimización de diseño, estructura, y el control de los robots deben ser desarrollados e implementados .
1.2.2. El Proceso de enseñanza-aprendizaje
El proceso pretende formar personas con capacidad para detectar problemas de su realidad, analizarlas y actuar sobre ellas; por tanto, contribuir positiva y eficazmente en su sociedad, de forma participativa. Por lo que el aprendizaje se concibe como productivo, esto es, que el estudiante sea capaz de analizar su contexto social, desarrollar ideas al respecto, y resolver los problemas que se presenten en su vida social.
Añadiendo a lo anterior, consideramos que en la educación formal los estudiantes se someten a dos tipos de procesos:
1) Informativo, por el que acceden, en forma sistemática, al conjunto de conocimientos que se delimitaron previamente en la organización curricular; y
para resolver problemas derivados de ese análisis y actuar en consecuencia.
Todo esto tomando en cuenta una perspectiva epistemológica, ya que cada individuo construye su propio conocimiento, por lo que los contenidos que se han estructurado no pasan de manera directa del educador al que aprende.
1.2.3. El proceso de enseñanza-aprendizaje en la robótica
La robótica educativa tiene su origen en los trabajos de investigación de Seymour Papert y otros científicos del Laboratorio de Medios del Instituto Tecnológico de Massachusetts (MIT) durante la década del 60. Estos investigadores desarrollaron dispositivos tecnológicos para que los niños construyeran edificios y máquinas. Luego, durante la década del 80, estos juguetes formaron parte del programa educativo en las escuelas.
En los últimos años, esta disciplina se ha ido desarrollando en todo el mundo, cada vez con más intensidad. Es, sin duda, una interesante vía de motivación para el aprendizaje de distintas áreas del conocimiento, tales como la matemática, la física, la ingeniería, la lógica, el diseño industrial y la electrónica(Papert Seymour, 1963).
Los estudiantes involucrados en el la construcción de robots desarrollan diversas capacidades, tales como la motricidad, la creatividad, la lógica y el trabajo en equipo. Se trata de una actividad que se puede manejar a manera de proyectos, que combina la planificación del robot y su realización. En una primera instancia, se diseña el prototipo de manera virtual mediante interfaces digitales, se testea y, de ser necesario, se corrige el modelo a desarrollar. Finalizada esta etapa, se procede a la construcción física del robot con dispositivos específicos como interfaces de control, sensores, microcontroladores y motores, aunque también es posible usar elementos más accesibles, como cajas de cartón y circuitos en desuso. En esta actividad pedagógica, el error es parte del proceso de aprendizaje. El alumno experimenta, construye, arma y desarma, desplegando todo su capital creativo.
Con la incorporación de estas nuevas tecnologías en Uniandes, se fomenta la innovación en el desarrollo del conocimiento, y se genera un ambiente de aprendizaje multidisciplinario en donde el alumno adquiere conocimientos de manera natural y entretenida.
1.2.3.1. Robots en el aula
El circuito comercial ofrece un extenso abanico de kits educativos para la creación autodidacta de robots, que muchos centros educativos utilizan como herramientas pedagógicas. Entre las grandes compañías dedicadas por años a la producción de juegos para niños y adolescentes, Lego desarrolló su división Lego Mindstorm, dedicada a la venta de kits para la construcción de robots.
También hay otras ofertas como la interface FlowGo de Data Harvest, la interface ROBO TX Controller de Fischertechnik, la interface Enconor de Enconor Tecnología Educativa, el Robot Programable mOway de MiniRobots y los kits educativos Robo-Ed.
En América latina, también hay instituciones dedicadas a la robótica educativa. En Ecuador, en noviembre del 2013 se realizó en Cuenca la Novena Edición del Concurso Ecuatoriano de Robótica, en el que participaron 8 universidades del país. O los concursos de competencias de robots seguidores de línea, del Proyecto Multimedia, realizado en febrero del 2012 en Quito.
1.3 Valoración Crítica de los conceptos principales de las distintas posiciones teóricas sobre la Robótica.
Desde siempre, las personas han inventado mecanismos y desarrollado tecnologías que nos permitieran transpasar los límites de nuestras capacidades. Al mismo tiempo, fantaseamos con la idea de jugar a ser Dios y crear seres a su imagen y semejanza. El enorme progreso en ingeniería, electrónica e informática lo está haciendo posible. Aquí o hallá, en nuestros hogares o en grandes fábricas. Los robots están entre nosotros, jugando un papel fundamental en nuestra vida diaria, en aparatos insospechados como teléfonos, lavadoras, refrigeradores. Nuestro actual estilo de vida se basa en tecnologías imprescindibles como por ejemplo, la robótica.