Diseño e Implementación de Estrategias Avanzadas de Control Utilizando Controladores Adaptativos Predictivos Edición Única
229
0
0
Texto completo
(2)
(3) INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY DIVISIÓN DE MECATRÓNICA Y TECNOLOGÍAS INFORMACIÓN PROGRAMA DE GRADUADOS EN MECATRÓNICA Y TECNOLOGÍAS DE INFORMACIÓN. Los miembros del comité de tesis recomendamos que la presente tesis del Ing. Manuel Gustavo Delgado Garza sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias con Especialidad en Automatización.. Comité de tesis:. Dr. Antonio Favela Contreras Asesor. Dr. José de Jesús Rodríguez Ortiz Sinodal. M.C. Luis Rosas Cobos Sinodal. Dr. Gerardo Antonio Castañón Ávila Director de las Maestrías de Electrónica y Automatización de DMTI Mayo de 2010.
(4)
(5) DISEÑO E IMPLEMENTACIÓN DE ESTRATEGIAS AVANZADAS DE CONTROL UTILIZANDO CONTROLADORES ADAPTATIVOS PREDICTIVOS. POR:. MANUEL GUSTAVO DELGADO GARZA. TESIS PRESENTADA AL INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY ESTE TRABAJO ES REQUISITO PARCIAL PARA OBTENER EL GRADO DE:. MAESTRO EN CIENCIAS CON ESPECIALIDAD EN AUTOMATIZACIÓN MAYO DE 2010.
(6)
(7) Dedicatoria. A mis papás, por el cariño y el apoyo incondicional que siempre me han dado y por motivarme a alcanzar las metas que me he trazado. A mis hermanas, Diana, Mercedes e Ileana, por sus consejos y apoyo.. vii.
(8)
(9) Agradecimientos. A Dios, por darme las herramientas para estar en donde estoy y lograr lo que he logrado. Al Tecnológico de Monterrey, por el apoyo para realizar mis estudios de maestría. A mi asesor, el Dr. Antonio Favela, por la confianza que puso en mi trabajo, sus consejos, su tiempo, y por las oportunidades de crecimiento que me ha brindado. A mis sinodales, el Dr. José de Jesús Rodríguez y el M.C. Luis Rosas, por su tiempo, comentarios y aportaciones a este trabajo. A mis maestros y coordinadores de la maestría, por la asesoría constante que me brindaron. A mis amigos y compañeros, por su apoyo, consejo y amistad.. ix.
(10)
(11) Resumen. En el presente trabajo de tesis presentado como requisito para la obtención de grado de Maestro en Ciencias con Especialidad en Automatización, se estudiaron e implementaron diversas estrategias avanzadas de control utilizando controladores adaptativos predictivos. En la primera parte de este trabajo, se estudió la estrategia de control adaptativo predictivo, sus principios de operación, así como los algoritmos involucrados en su implementación. Se introdujo la herramienta de control industrial ADEX COP, empleada como medio para la implementación y análisis de dichos controladores. Posteriormente, se realizó un análisis teórico del efecto de los parámetros de operación de los controladores adaptativos predictivo y se corroboró mediante simulaciones computacionales ante distintos escenarios de configuración. Se presentaron recomendaciones para la configuración de los bloques que componen la estrategia de control adaptativo predictivo, entre éstas, se mostró la manera de seleccionar la estructura del modelo adaptativo predictivo, el comportamiento deseado de la trayectoria deseada proyectada del bloque conductor y la importancia de la selección adecuada del periodo de control y los límites de las variables. Con los resultados obtenidos del estudio anterior, se realizaron implementaciones de varias estrategias de control empleando controladores adaptativos predictivos con el fin de estudiar su desempeño ante diversos escenarios de operación para procesos uni y multivariables variantes en el tiempo. Se estudió la estrategia de control retroalimentado con antealimentación de la perturbación. Finalmente, para analizar la forma en que los controladores interaccionan entre ellos dentro de una estrategia de control, se implementó una estrategia de control en cascada y un sistema de control multivariable. Se definió una forma de configurar los controladores adaptativos predictivos para funcionar adecuadamente en dichos esquemas de control y se realizaron simulaciones para mostrar la operación correcta de cada una de estas estrategias, comparando su funcionamiento frente a esquemas de control convencionales.. xi.
(12)
(13) Índice. CAPÍTULO 1. INTRODUCCIÓN ............................................................................................................... 3 1.1. Antecedentes ....................................................................................................................................................... 3 1.2. Justificación .......................................................................................................................................................... 4 1.3. Objetivos ................................................................................................................................................................ 5 1.4. Método.................................................................................................................................................................... 6 1.5. Organización de la tesis ................................................................................................................................... 6. CAPÍTULO 2. CONTROL ADAPTATIVO PREDICTIVO EXPERTO ........................................................... 11 2.1. Control predictivo........................................................................................................................................... 11 2.1.1. El concepto de bloque conductor .................................................................................................... 12 2.1.2. La trayectoria deseada proyectada ................................................................................................. 13 2.1.3. Estrategia básica de control predictivo......................................................................................... 14 2.1.4. Estrategia extendida de control predictivo ................................................................................. 14 2.2. Control adaptativo .......................................................................................................................................... 18 2.2.1. El mecanismo de adaptación ............................................................................................................. 19 2.3. Control adaptativo predictivo.................................................................................................................... 21 2.4. Control adaptativo predictivo experto................................................................................................... 22 2.5. Los controladores ADEX .............................................................................................................................. 22 2.6. La plataforma ADEX COP ............................................................................................................................. 23 2.6.1. Introducción ............................................................................................................................................. 23 2.6.2. Procesador ................................................................................................................................................ 25 2.6.3. Supervisor ................................................................................................................................................. 42 2.6.4. Simulador .................................................................................................................................................. 44. CAPÍTULO 3. ANÁLISIS. DEL EFECTO DE LOS PARÁMETROS DE LOS CONTROLADORES ADAPTATIVOS PREDICTIVOS .......................................................................................................... 49. 3.1. Bloque de proceso .......................................................................................................................................... 49 3.1.1. Tiempo de muestreo ST ....................................................................................................................... 49 3.1.2. Periodo de control CP ........................................................................................................................... 50 3.2. Mecanismo de adaptación ........................................................................................................................... 52 3.2.1. Selección del modelo adaptativo predictivo ............................................................................... 52 3.2.2. Valores iniciales de los coeficientes del modelo........................................................................ 54. xiii.
(14) 3.2.3. Velocidad del mecanismo de adaptación AM .............................................................................. 55 3.2.4. Nivel de ruido NL .................................................................................................................................... 59 3.3. Bloque conductor ............................................................................................................................................ 61 3.3.1. Velocidad de cambio RC ....................................................................................................................... 62 3.3.2. Constante de tiempo TC ....................................................................................................................... 63 3.3.3. Horizonte de predicción PH ............................................................................................................... 64 3.4. Bloque de control ............................................................................................................................................ 66 3.4.1. Constantes de filtrado FL..................................................................................................................... 66. CAPÍTULO 4. ESTUDIO DE ESTRATEGIAS DE CONTROL: ANÁLISIS, EXPERIMENTACIÓN Y RESULTADOS ................................................................................................................................... 71 4.1. Estrategias de control basada en controladores AP ......................................................................... 71 4.2. Control retroalimentado con antealimentación de perturbaciones .......................................... 72 4.2.1. Descripción de la estrategia ............................................................................................................... 72 4.2.2. Diseño de los controladores ............................................................................................................... 73 4.2.3. Experimentación y resultados........................................................................................................... 78 4.3. Control en cascada .......................................................................................................................................... 89 4.3.1. Descripción de la estrategia ............................................................................................................... 89 4.3.2. Experimentación ..................................................................................................................................... 91 4.3.3. Experimentación y resultados........................................................................................................ 100 4.4. Control multivariable aplicado a un proceso de fase no mínima ............................................. 113 4.4.1. Descripción de la estrategia ............................................................................................................ 113 4.4.2. Diseño de los controladores ............................................................................................................ 114 4.4.3. Experimentación y resultados........................................................................................................ 121 4.5. Recomendaciones generales ................................................................................................................... 135. CAPÍTULO 5. CONCLUSIONES Y TRABAJOS FUTUROS ...................................................................... 139 5.1. Conclusiones................................................................................................................................................... 139 5.2. Trabajos futuros ........................................................................................................................................... 140. BIBLIOGRAFÍA.................................................................................................................................. 145 ANEXOS ............................................................................................................................................ 147 Anexo A.. Creación de una aplicación personalizada en ADEX COP 2.0 ..................................... 149. Anexo B.. Documentación de las aplicaciones de control implementadas ............................... 191. Anexo C.. Guía rápida de parámetros de los controladores ADEX ............................................... 207. xiv.
(15) Índice de figuras. Figura 2.1. Diagrama de bloques básico del control predictivo. ............................................................ 12 Figura 2.2. Respuesta típica de un proceso de fase no mínima ante una entrada escalón............................................................................................................................................................ 15 Figura 2.3. Diagrama de bloques del control adaptativo. ......................................................................... 19 Figura 2.4. Diagrama de bloques del control adaptativo predictivo. ................................................... 21 Figura 2.5. Diagrama de bloques de la estrategia de control adaptativo predictivo experto. .......................................................................................................................................................... 22 Figura 2.6. Dominios de operación de controladores ADEX. .................................................................. 23 Figura 2.7. Estructura de una aplicación ADEX. ........................................................................................... 24 Figura 2.8. Ventana de edición de un proyecto en ADEX COP: Apartado del Procesador. ......... 26 Figura 2.9. Apartado para definición de entradas y salidas. ................................................................... 29 Figura 2.10. Apartado de configuración de controladores. ..................................................................... 30 Figura 2.11. Ventana de configuración de los controladores ADEX. .................................................... 31 Figura 2.12. Configuración de los controladores: Parámetros dentro del bloque de control. ........................................................................................................................................................... 35 Figura 2.13. Configuración de los controladores: Parámetros dentro del mecanismo de adaptación. ................................................................................................................................................... 36 Figura 2.14. Configuración de los controladores: Parámetros dentro del bloque experto. .......................................................................................................................................................... 39 Figura 2.15. Configuración de los controladores: Parámetros dentro del bloque conductor. ..................................................................................................................................................... 41 Figura 2.16. Apartado de configuración de parámetros de ejecución................................................. 42 Figura 2.17. Ventana de edición de un proyecto en ADEX COP: Apartado del Supervisor..................................................................................................................................................... 43 Figura 2.18. Ejemplo de una interfaz de supervisión. ................................................................................ 43 Figura 2.19. Ejemplo de programación de una simulación personalizada. ...................................... 45 Figura 3.1. Respuesta de G1(s) ante cambio en referencia utilizando diferentes periodos de control. .................................................................................................................................. 52 Figura 3.2. Respuesta del mecanismo de adaptación con AM=1.00..................................................... 57 Figura 3.3. Respuesta del mecanismo de adaptación con AM=0.75..................................................... 57 Figura 3.4. Respuesta del mecanismo de adaptación con AM=0.50..................................................... 58 Figura 3.5. Respuesta del mecanismo de adaptación con AM=0.25..................................................... 58 Figura 3.6. Respuesta del mecanismo de adaptación con AM=0.05..................................................... 59 Figura 3.7. Efecto del nivel de ruido sobre el mecanismo de adaptación. ......................................... 60 Figura 3.8. Efecto del nivel de ruido sobre desviaciones de la referencia. ........................................ 61 Figura 3.9. Efecto en la respuesta de la planta G1(s) en lazo cerrado ante un cambio de referencia escalón utilizando diferentes razones de cambio en el bloque conductor. ..................................................................................................................................................... 62 xv.
(16) Figura 3.10. Respuesta en lazo cerrado de G1(s) ante un cambio de referencia escalón utilizando diferentes constantes de tiempo en el bloque conductor................................... 63 Figura 3.11. Respuesta de G1(s) ante cambio en referencia utilizando una constante rápida. ............................................................................................................................................................ 64 Figura 3.12. Efecto de la constante de filtrado (FL) sobre la variable de proceso. ....................... 67 Figura 4.1. Esquema de control retroalimentado con un controlador AP. ....................................... 73 Figura 4.2. Respuesta del sistema monovariable a una entrada tipo escalón unitario. ............. 74 Figura 4.3. Configuración del mecanismo de adaptación para el control del sistema SISO. ................................................................................................................................................................ 76 Figura 4.4. Adaptación inicial de los coeficientes el modelo AP para el sistema monovariable. ............................................................................................................................................. 78 Figura 4.5. Respuesta del sistema monovariable ante un cambio en referencia. .......................... 80 Figura 4.6. Respuesta del sistema SISO ante una perturbación escalón a la salida. ..................... 81 Figura 4.7. Respuesta del sistema SISO ante una perturbación a la salida al agregar antealimentación....................................................................................................................................... 82 Figura 4.8. Adaptación del modelo AP al cambiar el tiempo muerto del sistema SISO. .............. 83 Figura 4.9. Respuesta ante un cambio en referencia al variar el tiempo muerto del sistema SISO. ............................................................................................................................................... 84 Figura 4.10. Respuesta regulatoria ante un cambio en la ganancia del sistema SISO.................. 85 Figura 4.11. Respuesta ante un cambio en referencia al variar la ganancia del sistema monovariable. ............................................................................................................................................. 86 Figura 4.12. Respuesta regulatoria ante cambios en la dinámica del proceso SISO. .................... 87 Figura 4.13. Respuesta ante un cambio en referencia tras un cambio en la dinámica del proceso SISO. ....................................................................................................................................... 88 Figura 4.14. Respuesta del sistema ante perturbación tras un cambio en la dinámica del proceso monovariable. .................................................................................................................... 89 Figura 4.15. Esquema de control en cascada. ............................................................................................... 90 Figura 4.16. Respuesta en lazo abierto del proceso en cascada y de sus subprocesos ante entradas tipo escalón unitario. .................................................................................................. 91 Figura 4.17. Desempeño del lazo interno del proceso en cascada ante cambios en referencia. .................................................................................................................................................... 96 Figura 4.18. Comportamiento en lazo abierto del sistema en cascada (lazo interno cerrado)......................................................................................................................................................... 97 Figura 4.19. Efecto de la variación del horizonte de predicción externo. ....................................... 101 Figura 4.20. Desempeño del sistema de control en cascada con CP=0.6 seg. ................................ 102 Figura 4.21. Desempeño del sistema de control en cascada con CP=2.0 seg. ................................ 103 Figura 4.22. Respuesta del sistema interno ante cambios en referencia. ....................................... 104 Figura 4.23. Respuesta del sistema en cascada ante un cambio en la referencia principal. ..................................................................................................................................................... 105 Figura 4.24. Respuesta ante perturbaciones en el lazo interno para el esquema (a) ADEX y (b) PI. ........................................................................................................................................... 107 Figura 4.25. Respuesta ante perturbaciones en el lazo externo. ........................................................ 108. xvi.
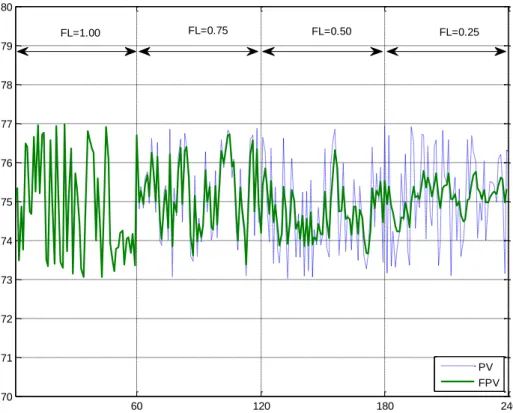
(17) Figura 4.26. Adaptación de los coeficientes del modelo interno ante un cambio en la dinámica simulada. ................................................................................................................................ 109 Figura 4.27. Adaptación de los coeficientes del modelo externo ante un cambio en la dinámica simulada. ................................................................................................................................ 110 Figura 4.28. Respuesta ante cambio en referencia tras variar el modelo externo...................... 111 Figura 4.29. Respuesta ante perturbaciones tras variar el modelo externo. ................................ 112 Figura 4.30. Esquema de control retroalimentado multivariable. .................................................... 114 Figura 4.31. Respuesta del sistema MIMO a una entrada escalón en OUT1 de 30 a 35. ............ 115 Figura 4.32. Respuesta del sistema MIMO a una entrada escalón en OUT2 de 40 a 45. ............ 116 Figura 4.33. Adaptación de los parámetros del modelo AP del CAP1, manteniendo CAP2 en modo manual. ........................................................................................................................ 122 Figura 4.34. Adaptación de los parámetros del modelo AP del CAP2, utilizando valores iniciales inadecuados. ........................................................................................................................... 123 Figura 4.35. Adaptación de los parámetros del modelo AP del CAP1, al habilitar ambos controladores simultáneamente. ..................................................................................................... 124 Figura 4.36. Efecto del horizonte de predicción sobre el proceso de fase no mínima (valores estables). .................................................................................................................................. 126 Figura 4.37. Efecto del horizonte de predicción sobre el proceso de fase no mínima (PH=3, valor inestable). ....................................................................................................................... 127 Figura 4.38. Respuesta ante cambio en SP1 (SP2 constante) utilizando distintos horizontes de predicción. .................................................................................................................... 128 Figura 4.39. Respuesta ante cambio en SP1 (SP2 constante) con un horizontes de predicción críticamente estable (PH=4). ...................................................................................... 129 Figura 4.40. Respuesta de los controladores ante cambios en el retraso y el efecto inverso......................................................................................................................................................... 131 Figura 4.41. Respuesta ante cambio en las ganancias (interacciones). ........................................... 133 Figura 4.42. Comparación de desempeño al variar el horizonte de predicción. .......................... 133 Figura 4.43. Desempeño ante perturbaciones a la salida del CAP1. ................................................. 134. xvii.
(18)
(19) Índice de tablas. Tabla 4.1. Indicadores de desempeño ante un cambio en referencia para el sistema SISO.................................................................................................................................................................. 79 Tabla 4.2. Indicadores de desempeño ante una perturbación a la salida para el sistema SISO.................................................................................................................................................................. 82 Tabla 4.3. Indicadores de desempeño ante un cambio en referencia para el sistema SISO con variación en la ganancia....................................................................................................... 86 Tabla 4.4. Indicadores de desempeño ante un cambio de referencia del lazo de control interno del proceso en cascada............................................................................................................ 95 Tabla 4.5. Indicadores de desempeño ante un cambio en la referencia interna para el sistema esclavo. ....................................................................................................................................... 104 Tabla 4.6. Indicadores de desempeño ante un cambio en la referencia principal para el sistema en cascada. ................................................................................................................................ 106 Tabla 4.7. Indicadores de desempeño del lazo interno ante una perturbación a la salida. ........................................................................................................................................................... 106 Tabla 4.8. Indicadores de desempeño del lazo externo ante una perturbación a la salida. ........................................................................................................................................................... 107 Tabla 4.9. Indicadores de desempeño ante un cambio en la referencia principal para el sistema en cascada tras variar el modelo externo. ................................................................... 111 Tabla 4.10. Indicadores de desempeño del lazo externo ante una perturbación a la salida tras variar el modelo externo. .............................................................................................. 113 Tabla 4.11. Indicadores de desempeño ante un cambio en la referencia de PV1 utilizando distintos horizontes de predicción. ........................................................................... 129. xix.
(20)
(21) CAPÍTULO 1. INTRODUCCIÓN. En el presente capítulo se proporciona el entorno del trabajo de investigación y la problemática que se pretende resolver. Se especifican los objetivos de la tesis y el método seguido. 1.
(22)
(23) Capítulo 1. Introducción. En el presente capítulo, se presentan los antecedentes para situar al lector en el entorno del presente trabajo, seguido de una justificación del problema de investigación, los objetivos de este trabajo de tesis y el método que se siguió para lograrlos. Además, se describe la organización de este escrito.. 1.1. ANTECEDENTES A finales del siglo XIX, tras la revolución industrial y con el surgimiento de la manufactura, nace la necesidad de conocer y optimizar el funcionamiento de los sistemas automáticos de producción. Dicha necesidad fue precisamente la que dio origen a los sistemas de control, parte esencial de los sistemas de producción en masa a inicios del siglo XX. Desde el punto de vista de la teoría de control, es posible representar un proceso de producción, también denominado planta, como un bloque (o modelo) que ante determinadas señales de entrada genera un conjunto de señales de salida. Los sistemas de control, por lo tanto, están conformados por el grupo de dispositivos encargados de manipular y procesar dichas señales de entrada y salida para obtener el mayor beneficio del comportamiento del sistema ante necesidades específicas de operación. Tanto las entradas (denominadas comúnmente como señales de control) como las salidas (o variables de operación del proceso) suelen representar variables físicas, como el porcentaje de apertura de una válvula, el flujo de entrada o salida de una sustancia, la temperatura de un horno o el nivel de llenado de un tanque. Existen además otros factores, como las perturbaciones, que tienen impacto en los niveles de operación del proceso. Generalmente, se pretende mantener las variables de salida en niveles fijos y estables, incluso ante la aparición de perturbaciones, manipulando para ello las señales de entrada a niveles determinados. El esquema de control más clásico es el denominado control retroalimentado. Bajo dicho esquema, la señal de salida de la planta, sujeta a perturbaciones, es sensada y retroalimentada al controlador, que la compara con la referencia o nivel de operación deseado. Dicha comparación genera un error mediante el cual se determina una acción de. 3.
(24) CAPÍTULO 1: INTRODUCCIÓN. control para corregirlo. Además, para ofrecer un mejor desempeño del sistema, se han planteado diversas estrategias de control avanzado, como el control cascada o el antealimentado, por mencionar algunos esquemas comunes. Sin duda, el controlador más comúnmente utilizado es el PID. Éste tiene diversas funciones: actúa inmediatamente a través de su acción proporcional, es capaz de eliminar el error de estado estable a través de la acción integral y puede anticipar el futuro mediante la acción derivativa. Este tipo de controladores es suficiente para resolver una amplia gama de problemas de control, particularmente cuando la dinámica es sencilla y los requerimientos modestos; debido a esto, su utilización prevalece en más del noventa por ciento de los lazos de control existentes. [2] A pesar de lo anterior, existen ciertos procesos para los cuales el funcionamiento del controlador PID no es del todo adecuado, debido principalmente a alguna de las siguientes causas: no linealidad del proceso, variabilidad del proceso en el tiempo, inestabilidad del sistema, interdependencia entre procesos o complejidad de la dinámica de la planta. Por ello, han surgido controladores y estrategias capaces de trabajar adecuadamente con algunas de estas características. El presente trabajo de investigación se basa en la utilización del esquema de control denominado adaptativo predictivo, capaz de manejar la dinámica variable de un proceso y ofrecer una respuesta que prediga el comportamiento futuro del mismo.. 1.2. JUSTIFICACIÓN El controlador PID es, sin dudas, el controlador más común a nivel industrial. Esto se debe, principalmente, a los siguientes factores: simplicidad de la formulación matemática del controlador, disponibilidad amplia de documentación y sencillez para la sintonía de los parámetros del controlador. Sin embargo, en el diseño de estos controladores se realizan diversas suposiciones que en ocasiones comprometen su desempeño adecuado; una de estas suposiciones consiste en pretender que los procesos son lineales e invariantes en el tiempo, lo cual es altamente lejano a la realidad para muchas aplicaciones. En gran cantidad de casos, los elementos del proceso cambian en el tiempo de manera constante, por ejemplo, por desgaste de los componentes o por la naturaleza propia del sistema. Para trabajar con estos procesos, se suele diseñar en un rango de operación que se. 4.
(25) CAPÍTULO 1: INTRODUCCIÓN. asume lineal e incluso se emplean diversas estrategias para compensar la dinámica del proceso. No obstante, cuando el sistema se aleja de estos supuestos, el desempeño se deteriora y el controlador deja de cumplir con los objetivos para los que fue diseñado. Ante esta situación, surge la necesidad de controladores y estrategias capaces de solucionar los problemas que los diseños convencionales no son capaces de manejar. En la presente investigación, se plantea como solución a dicha problemática la utilización de distintas estrategias avanzadas de control, valiéndose del uso de controladores adaptativos predictivos, para mejorar el desempeño del control en procesos reales difíciles de controlar, tales como sistemas no lineales y/o lineales variantes en el tiempo, ya sean monovariables o multivariables, inestables y/o de fase no mínima, entre otros.. 1.3. OBJETIVOS Diseñar e implementar estrategias avanzadas de control basadas en la utilización de controladores adaptativos predictivos para el control de sistemas complejos, monovariables, multivariables, no lineales y/o lineales variantes en el tiempo. De manera específica, se pretende alcanzar lo siguiente: . Estudiar a fondo la estrategia de control adaptativo predictivo.. . Implementar distintas estrategias de control basadas en controladores adaptativos predictivos.. . Analizar el efecto operacional de los principales parámetros de los controladores adaptativos predictivos ADEX usados en aplicaciones industriales.. . Proporcionar pautas generales para configurar los controladores adaptativos predictivos en diversas estrategias empleadas para distintos tipos de procesos uni y multivariables variantes en el tiempo.. . Analizar la forma en que los controladores adaptativos predictivos interaccionan dentro de una estrategia de control.. 5.
(26) CAPÍTULO 1: INTRODUCCIÓN. . Contrastar el desempeño de estas estrategias de control avanzado frente a esquemas convencionales de control.. 1.4. MÉTODO En la realización de la investigación, se siguieron los siguientes pasos para lograr los objetivos planteados: . Investigación bibliográfica sobre la estrategia de control adaptativo predictivo.. . Estudio de la metodología ADEX y familiarización con la plataforma ADEX COP, empleada en la implementación de las estrategias de control.. . Implementación de un simulador de la estrategia retroalimentada básica de control adaptativo predictivo mediante la plataforma ADEX COP.. . Estudio de los parámetros involucrados en la operación de los controladores adaptativos predictivos expertos y de su impacto en el desempeño de control.. . Implementación de simuladores para estrategias de control avanzadas utilizando controladores AP, que permitan comparar el desempeño de los controladores adaptativos predictivos frente a esquemas de control convencionales.. . Diseño, sintonización y simulación de procesos controlados mediante las estrategias seleccionadas.. . Análisis del desempeño de los controladores en las estrategias implementadas ante diversas condiciones de operación.. . Presentación de conclusiones y perspectivas de trabajos futuros.. 1.5. ORGANIZACIÓN DE LA TESIS En el Capítulo 1 se presentó una introducción al tema que aborda el presente trabajo de investigación, así como su justificación, delineando los objetivos de la tesis y el método para lograrlos. 6.
(27) CAPÍTULO 1: INTRODUCCIÓN. En el Capítulo 2 se proporciona una breve descripción del marco teórico del control adaptativo predictivo, incluyendo una descripción del control predictivo, sus principios de operación, los modelos empleados, la necesidad de un mecanismo de adaptación y un primer acercamiento a la estrategia de control ADEX. Además, se brinda una descripción abreviada de la plataforma tecnológica ADEX COP 2.0, empleada como herramienta para implementar los esquemas de control en el presente trabajo. Por último, se describen los controladores que se utilizan y sus parámetros de operación. En el Capítulo 3 se profundiza en el impacto de los principales parámetros que conforman a los controladores adaptativos predictivos, estudiando su impacto en el desempeño de sistemas monovariables sencillos controlados con la estrategia AP básica. En el Capítulo 4 se presentan algunas estrategias de control más usadas, implementadas con controladores adaptativos predictivos. Se simula una estrategia retroalimentada simple, un sistema de control en cascada y un esquema multivariable de 2 × 2, y se validan controlando procesos de primer y segundo orden, con ganancias tanto positivas como negativas, de fase no mínima, inestables y/o no lineales, con dinámicas variantes en el tiempo. En el Capítulo 5 se presentan las conclusiones de la investigación y recomendaciones para trabajos futuros.. 7.
(28)
(29) CAPÍTULO 2. CONTROL ADAPTATIVO PREDICTIVO EXPERTO. En el presente capítulo se introduce la metodología de control adaptativo predictivo experto así como los conceptos básicos involucrados con dicho esquema de control. Además, se proporciona una descripción general de la 9 herramienta de control utilizada para la implementación de las estrategias..
(30)
(31) Capítulo 2. Control adaptativo predictivo experto. 2.1. CONTROL PREDICTIVO El control predictivo tiene como objetivo lograr que a partir de un modelo del proceso, la salida del proceso predicha coincida con una respuesta deseada, elegida convenientemente para dicho sistema. Dicha trayectoria de comportamiento deseada se elige de modo que sea físicamente realizable, mediante acciones de control acotadas, y que conduzca a la salida de proceso hacia el valor de referencia de forma rápida, sin sobretiro ni error de estado estable. El control predictivo se emplea usualmente cuando se requieren mejores resultados que los que se puede obtener con técnicas no predictivas. Esto incluye sistemas cuyo comportamiento futuro puede diferir considerablemente del comportamiento actual que se percibe de ellos, tales como sistemas con tiempo muerto, sistemas de orden elevado, sistemas subamortiguados y procesos de fase no mínima. [6] En 1959, Smith introdujo por primera vez la idea de utilizar un predictor para superar el problema de controlar sistemas con tiempo muerto. Desde entonces y gracias a la introducción del control computarizado, enfoques como el de los compensadores de tiempo muerto surgieron para abordar este problema de control. Una de estas estrategias es el control predictivo generalizado, el cual tiene como principio de operación la aplicación de las siguientes acciones: . En el instante actual, se realiza una predicción de la salida de proceso a lo largo de un horizonte de predicción, con base en un modelo matemático del proceso.. . Se selecciona la acción de control que conduzca a la salida predicha del sistema hacia el valor de referencia de la mejor manera de acuerdo a algún objetivo de control específico.. . La salida de control se aplica al sistema real en el instante de control actual. En el siguiente instante de control, se repite el procedimiento, permitiendo generar una acción de control actualizada y corregida de acuerdo a las mediciones más recientes.. 11.
(32) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Figura 2.1. Diagrama de bloques básico del control predictivo.. En general, la predicción sirve para estimar los valores futuros de la variable de proceso basándose en la información disponible del sistema. Mientras más representativa sea esta información del sistema mayor será la exactitud de la predicción. Dicha información del proceso se recoge en lo que se denomina modelo predictivo, el cual calcula las señales de control. Por otra parte, la información de la trayectoria deseada y el modelo para generarla se incluye en el bloque conductor. Estos dos elementos conforman el esquema básico de control predictivo, mostrado en la Figura 2.1. De antemano, la estructura del modelo que se utilizará en el bloque o modelo predictivo corresponde a un modelo ARX, por ejemplo,. (2.1). donde. (k) representa un vector de perturbaciones o ruido.. 2 . 1 . 1 . EL CONCEPTO DE BLOQUE CONDUCTOR El bloque conductor, como ya se mencionó, debe generar la trayectoria que se desea que la salida controlada siga para llegar a su valor de referencia. Este concepto surge de la idea de un modelo de referencia. El modelo de referencia genera básicamente una trayectoria a partir del valor de setpoint que se pretende alcanzar y siguiendo ciertas características deseadas. Un ejemplo típico se puede definir como. 12.
(33) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. (2.2). donde y e y representan la salida deseada del modelo y el setpoint, respectivamente. Los d. sp. coeficientes del modelo se pueden elegir para cualquier modelo deseado, por ejemplo, un sistema de segundo orden sobreamortiguado, con ganancia unitaria constante y una constante de tiempo dominante pequeña. Con ello, puede obtenerse la trayectoria para los instantes k = 0,1,... en función de un valor de setpoint. Observe que este concepto no contempla la evolución real del sistema, al calcularse únicamente a partir del setpoint. Ante esta situación, el bloque conductor introduce un pequeño cambio a esta formulación. La diferencia radica en que la trayectoria deseada se calcula, en cada instante de control, a partir no sólo del setpoint y del comportamiento deseado, sino que también se incluye para el instante actual y los periodos anteriores, la trayectoria real que sigue la salida del proceso. Así, si al cabo de un instante de control la salida real y (k) no alcanza el nivel deseado o se aleja debido a alguna perturbación, la trayectoria deseada se recalcula, asegurando que la variable llegará a la referencia siguiendo un comportamiento físicamente realizable.. 2 . 1 . 2 . LA TRAYECTORIA DESEADA PROYECTADA Considerando el planteamiento del bloque conductor y la necesidad de recalcular la trayectoria deseada en cada instante de control, se introduce el concepto de trayectoria deseada proyectada, la cual se define por la siguiente ecuación. (2.3). donde la diferencia con el modelo de referencia radica en considerar (2.4). La notación utilizada indica que y (k + j\k) es la salida deseada para el instante k + j d. calculada a partir de los datos en el instante k. Los coeficientes del modelo se pueden elegir. 13.
(34) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. también para ajustarse a un sistema particular, por ejemplo, un proceso de segundo orden, con cambios suaves y sin sobretiro.. 2 . 1 . 3 . ESTRATEGIA BÁSICA DE CONTROL PREDICTIVO La estrategia básica de control predictivo considerará únicamente la predicción para el siguiente instante de control k + 1, hecha en el instante k, la cual para un modelo predictivo como el propuesto en (2.1), con los valores estimados en el instante k queda definida como. (2.5). La estrategia básica, como se describe en [9], contempla las siguientes acciones: 1). Calcular la salida deseada para el instante k + 1 de acuerdo a la trayectoria deseada proyectada,. (2.6). 2) Determinar la acción de control predictivo u(k) para el instante de control actual,. (2.7). Estos pasos se repiten en cada instante de control subsecuente.. 2 . 1 . 4 . ESTRATEGIA EXTENDIDA DE CONTROL PREDICTIVO Existen procesos para los cuales la estrategia básica no es capaz de de conducir a la variable de salida hacia el valor de referencia deseado con acciones de control acotadas y estables. Un ejemplo de este tipo de procesos son aquellos que pueden ser modelados como sistemas de fase no mínima. Estos sistemas se caracterizan por responder inicialmente con una ganancia opuesta a la que tienen en su estado estable; este efecto se debe a la presencia de un cero. 14.
(35) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. inestable en el modelo de este tipo de procesos. Un ejemplo de este tipo de sistemas se define por la siguiente función de transferencia continua. (2.8). La respuesta simulada de dicho sistema se muestra en la Figura 2.2. Observe que cuando se aplica el cambio en la acción de control positivo, la salida del sistema responde inicialmente de forma negativa (inversa). Si se aplica la estrategia básica a este sistema, buscando que la salida controlada al cabo de un instante de muestreo alcance un nivel positivo deseado, se requerirá una acción de control negativa; más aún, para que la salida continúe evolucionando de acuerdo a dicha trayectoria deseada, las acciones de control negativas para ir alcanzando estos valores irán creciendo indefinidamente hasta alcanzar los límites negativos permisibles para la acción de control, lo cual resultaría inaceptable desde el punto de vista de realización física. Este problema se ilustra con mayor detalle en [9]. Si bien, en teoría es posible cancelar el efecto de los ceros inestables mediante el modelo de referencia, en la práctica no resulta muy factible debido al desconocimiento preciso de estos valores. Para este tipo de procesos, sin embargo, se cuenta con la estrategia extendida de control predictivo, la cual no realiza la predicción en un solo instante futuro, sino en un. Figura 2.2. Respuesta típica de un proceso de fase no mínima ante una entrada escalón.. 15.
(36) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. horizonte de predicción que abarca un mayor número de instantes determinado por el parámetro. y además, considera la dinámica del proceso.. Definiendo un intervalo de predicción. a partir del instante de muestreo k, es. posible predecir una secuencia de salidas. en función de una secuencia de acciones. de control. Esta predicción se realiza aumentando el número. de instantes futuros considerados en el modelo (2.5), tal que. (2.9). donde se considera. (2.10). que corresponden a las salidas medidas y a las entradas ya aplicadas en el instante k. Note que cuando se considera. = 1, las ecuaciones corresponden a la estrategia básica.. A partir de este planteamiento, la trayectoria deseada proyectada en cada instante k es la trayectoria predicha por el modelo predictivo en respuesta a la secuencia de control, de modo que éstas satisfagan cierto criterio de rendimiento. En [9], Sánchez propone. (2.11). donde. es una trayectoria de referencia generada dentro del horizonte de. predicción, tal que:. (2.12). considerando. 16.
(37) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. (2.13). La función de costo (2.11) se debe minimizar para encontrar los valores de la secuencia de control predicha. Según los principios de la estrategia, una vez encontrados dichos valores, se aplica u(k) =. y se repite el procedimiento para k + 1.. Empleando el modelo predictivo (2.9) de forma recursiva, partiendo de (2.10), se encuentra. (2.14). donde. y. son coeficientes que se pueden obtener de los parámetros. y. del modelo. predictivo mediante el siguiente algoritmo recursivo:. (2.15). donde. (2.16). La función de costo planteada implica que la trayectoria deseada proyectada resultante se aproxime lo más posible a la trayectoria de referencia en dicha función, mientras que los coeficientes Qj y Rj se escogen para dar más o menos peso al seguimiento de la trayectoria de referencia o a la magnitud de la acción de control. Ahora bien, la solución del problema de minimización con. incógnitas presenta la necesidad de realizar un número elevado de. operaciones y cálculos matriciales. -dimensionales, los cuales se incrementan si los. coeficientes del modelo son adaptados en línea. Si bien, resolver el problema permite encontrar toda la secuencia de acciones de control estimadas, únicamente la primera de éstas será utilizada. Por lo tanto, se propone comúnmente elegir los siguientes factores de costo. 17.
(38) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. (2.17). además de mantener constante la secuencia de control en el intervalo de predicción, permitiendo reducir la función de costo a. (2.18). A partir de estas condiciones, se reescribe (2.14) para el instante k +. tal que. (2.19). Finalmente, forzando J = 0 se puede obtener u(k) a partir de la ecuación k. (2.20). El desempeño de la ley de control, en la cual es posible agregar el parámetro de retraso d, depende de manera importante de la precisión de los coeficientes del modelo predictivo empleado. Por ello, cuando se trabaja con sistemas reales cuya dinámica puede variar a lo largo del tiempo debido a diversas condiciones de operación, es útil mantener el modelo actualizado para obtener el mejor desempeño de la estrategia predictiva.. 2.2. CONTROL ADAPTATIVO Como se mencionó, resulta fundamental contar con un modelo del sistema que lo describa fielmente en todo momento y ante distintas condiciones de operación; para ello, se utiliza un mecanismo de adaptación. El control adaptativo resuelve el problema que surge al trabajar con sistemas reales que muchas veces son no lineales o variantes en el tiempo, de los cuales se desconoce el orden exacto y el valor de sus parámetros. [8]. 18.
(39) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Figura 2.3. Diagrama de bloques del control adaptativo.. La Figura 2.3 muestra el diagrama de bloques de este esquema. Básicamente, el sistema se basa en la comparación de la salida del proceso con la salida de un modelo del mismo. Con dicha comparación se genera un error que permite ajustar el modelo, de modo que dicho error tienda a cero conforme pasa el tiempo. Los coeficientes del modelo son ajustados en cada instante de muestreo a partir de sus valores anteriores y en función del error entre la salida del proceso y la salida generada por el modelo.. 2 . 2 . 1 . EL MECANISMO DE ADAPTACIÓN Para explicar el mecanismo de adaptación, se empleará la notación vectorial del modelo del proceso de la siguiente forma (2.21). El modelo adaptativo predictivo (AP) se describe (2.22). donde. (2.23). Se considera el caso ideal donde. (k) y. son iguales, donde. 19.
(40) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. (2.24). La diferencia entre los parámetros del proceso y los del modelo viene dada por la forma (2.25). Se utilizará el cálculo del error a posteriori para la estrategia, esto es (2.26). El siguiente algoritmo se propone en [9] para definir el mecanismo de adaptación (2.27). donde B es una matriz definida positiva. Observe que el error a posteriori e(k\k) se determina en el instante k a partir de la salida del proceso y(k\k), la cual se calcula a partir de la ecuación del modelo AP a partir del valor de los parámetros ya ajustado en el mismo instante. Para romper este círculo de dependencias, se emplea el error a priori, definido como (2.28). Restando (2.28) de (2.26), se obtiene (2.29). Finalmente, mediante (2.27) y (2.29) se obtiene. (2.30). con lo cual queda definido el mecanismo de adaptación estable. De manera alternativa, el mecanismo de adaptación puede expresarse de modo que (2.31). donde. (2.32). 20.
(41) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. El vector 𝐺 𝑘 se denomina vector de ganancia variable y se utiliza en el modelo definido (2.31) para sumar al vector previo de parámetros una estimación nueva determinada en función del error de estimación multiplicada por dicho vector de ganancia variable. Debe aclararse que el método presentado es solamente una alternativa para solucionar el problema de adaptación de manera estable, aunque existen otras como el método del gradiente o el método de mínimos cuadrados, por ejemplo. Nótese además que el objetivo del mecanismo planteado no es realizar una identificación paramétrica del sistema, sino encontrar un modelo adecuado que permita aproximar la dinámica y ganancia del proceso para que se pueda, por medio de él, alcanzar los valores establecidos de referencia.. 2.3. CONTROL ADAPTATIVO PREDICTIVO Al combinar el modelo de control predictivo con el mecanismo de adaptación presentado previamente, se obtiene el esquema de control adaptativo predictivo. Bajo este esquema, el modelo predictivo generará la salida de control con base en la salida deseada dada por el bloque conductor. El modelo de adaptación se encargará de ajustar dicho modelo cada instante de muestreo, haciendo que cualquier error que se presente tienda a cero. Con ello, se logra que la salida deseada sea igual a la salida del proceso de manera dinámica. El esquema integrado se muestra en la Figura 2.4.. Proceso Referencia. Bloque conductor. Salida del proceso Error. Modelo predictivo Modelo. Salida del modelo Mecanismo de adaptación. Figura 2.4. Diagrama de bloques del control adaptativo predictivo.. 21.
(42) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. 2.4. CONTROL ADAPTATIVO PREDICTIVO EXPERTO El control adaptativo predictivo ofrece un excelente desempeño mientras que se mantenga una relación causa – efecto entre las entradas y salidas del sistema. Sin embargo, existen muchos procesos en los que esto deja de ocurrir en varios rangos de operación; esto suele suceder cuando se opera en los límites superiores o inferiores de las variables de operación. Cuando esto ocurre, el mecanismo de adaptación no es capaz de “identificar” adecuadamente al sistema y los coeficientes del modelo suelen tender a cero, impidiendo el control. En la anterior situación, resulta más recomendable operar en modo manual para que las variables de proceso se conduzcan a sus valores adecuados. Ante estos casos, el control experto complementa el funcionamiento de los controladores adaptativos predictivos proporcionando un control adecuado cuando las variables se alejan de los rangos en los que éstos pueden operar.. 2.5. LOS CONTROLADORES ADEX Los controladores ADEX integran estos tres módulos de control en la estrategia de control adaptativo predictivo experto, mostrada en la Figura 2.5.. Bloque experto. Referencia. Bloque conductor. Salida deseada. Modelo predictivo. Señal de control. Salida del proceso. Proceso. Mecanismo de adaptación Figura 2.5. Diagrama de bloques de la estrategia de control adaptativo predictivo experto.. 22.
(43) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. DOMINIO EXPERTO EX - S AP - S DOMINIO ADAPTATIVO PREDICTIVO AP - C AP - I EX - I Figura 2.6. Dominios de operación de controladores ADEX.. Como se describen en [1], los controladores ADEX cuentan con hasta cinco dominios de operación, dos de ellos expertos y los otros tres adaptativos predictivos (Figura 2.6). Dependiendo del rango en que se encuentra la variable de proceso, el controlador opera en cada uno de estos dominios. Estos controladores se implementan comercialmente mediante la plataforma tecnológica de control ADEX COP.. 2.6. LA PLATAFORMA ADEX COP La plataforma de control. ADEX COP 2.0 es empleada en el presente trabajo para la. implementación de las estrategias de control. Por ello, se dedica esta sección para describir brevemente sus principios de operación, los pasos involucrados en el diseño e implementación de las aplicaciones de control, así como la estructura de los controladores empleados y sus parámetros de operación.. 2.6.1. INTRODUCCIÓN La plataforma ADEX COP 2.0 (ADEX Control & Optimization Platform) se utiliza para el desarrollo de Esquemas de Control y Optimización (ECO) utilizando controladores adaptativos predictivos expertos (ADEX). Además, permite la simulación de procesos y la creación de interfaces gráficas de usuario para el monitoreo o supervisión de los sistemas controlados. El software trabaja en el entorno operativo de Microsoft Windows, empleando funciones de operación en tiempo real de LabVIEW de National Instruments.. 23.
(44) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Para el desarrollo y ejecución de los sistemas optimizados de control ADEX, la plataforma consta de tres utilidades fundamentales: procesador, supervisor y, opcionalmente, el simulador que toma el lugar del proceso. La estructura de comunicación entre dichos módulos se muestra en la Figura 2.7. A continuación se describen sus funciones: . Procesador (“Processor”). Permite la implementación de los esquemas de control utilizando controladores ADEX. En esta utilidad se define la estrategia de control a ejecutar, ya sea en su configuración estándar o personalizada. Todas las variables relacionadas con el sistema de control son definidas y delimitadas en este apartado del programa.. . Supervisor (“Supervisor”). Se emplea para la creación de una interfaz gráfica de usuario (GUI) para el monitoreo de las variables del sistema de control. La interfaz diseñada podrá permitir la introducción de variables de operación por parte del usuario así como la supervisión y/o modificación de las variables de los controladores y sus parámetros de configuración.. . Simulador (“Simulator”). Permite realizar una simulación de los procesos a controlar, de modo que sea posible probar el funcionamiento de la estrategia de control diseñada fuera de línea. La simulación puede diseñarse de dos maneras: estándar (para estructuras de proceso simples) y personalizada (para simular procesos de mayor complejidad).. SUPERVISOR Interfaz gráfica de usuario. Almacenamiento de datos. PROCESADOR. Ethernet. Driver TCP. Estrategia de control y optimización. PROCESO E/S. Almacenamiento de datos. Figura 2.7. Estructura de una aplicación ADEX.. 24. O SIMULADOR.
(45) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Tanto el Supervisor como el Procesador y el Simulador, en su modo personalizado, requieren de la herramienta de programación gráfica LabVIEW para el diseño e implementación de las interfaces, las estrategias de control y las simulaciones de procesos, respectivamente. Debe notarse que la plataforma se emplea únicamente durante la etapa de diseño para definir las tres secciones de las aplicaciones de control. Posteriormente el diseño se valida y se crea la aplicación ejecutable conformada por las partes ya descritas. Durante la operación, los módulos diseñados se ejecutan de manera independiente. Así, será responsabilidad del Procesador ejecutar la estrategia diseñada, recibiendo los datos de operación y proceso y generando las acciones de control. El Supervisor, cuando sea requerido, desplegará la interfaz de control diseñada permitiendo monitorear los procesos e introducir valores de operación. El Simulador, si se utiliza, recibirá los comandos de control y retornará a cambio los valores de las variables del proceso simulado. En las siguientes secciones, se describen a mayor detalle los componentes de la plataforma ADEX COP 2.0, así como los parámetros involucrados en el diseño y funcionamiento de los controladores ADEX.. 2.6.2. PROCESADOR Como ya se mencionó, el Procesador es el módulo encargado de la ejecución de las estrategias de control, es decir, es aquél que tiene por función realizar las acciones necesarias para el control del proceso. En el Procesador se encuentra implementado tanto el esquema de control como la adquisición de los datos y el resto de la lógica y programación requerida para el correcto funcionamiento del sistema de control. El apartado de diseño y configuración del Procesador se muestra en la Figura 2.8.. Definición de la estrategia de control Dentro del apartado Estrategia de control (“Control Strategy”) ADEX COP permite la definición de las estrategias de control de dos formas distintas: estándar y personalizada.. 25.
(46) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Figura 2.8. Ventana de edición de un proyecto en ADEX COP: Apartado del Procesador.. Estrategia estándar Se utiliza cuando se requiere una implementación sencilla de los controladores ADEX, con poca lógica adicional ya sea previa o posterior a la ejecución de los controladores o sin requerir la realización de operaciones de control específicas no contenidas en las estrategias ADEX predeterminadas. La estrategia estándar permite la implementación de múltiples controladores ADEX de 𝑚 entradas por 𝑛 salidas. La implementación de cada controlador estándar requiere la definición de los siguientes parámetros: nombre del controlador, categoría (maestro o esclavo), número de variables de proceso (de una a tres; determina también el número de variables a manipular) y número de perturbaciones (hasta seis). De este modo, se puede tener un máximo de 𝑚 = 9 (tres variables de proceso y seis perturbaciones) con 𝑛 = 3. Cada controlador ADEX empleado dentro de la estrategia utiliza las siguientes variables análogas de entrada: 𝑷𝑽 (variables de proceso que se desean controlar), 𝑺𝑷 (valores de referencia que se desean alcanzar para las variables de proceso), 𝑨𝑰 (última entrada real. 26.
(47) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. aplicada al proceso; puede diferir de la última salida de control, mas no necesariamente), 𝑷𝑬𝑹𝑻 (valores de las perturbaciones medibles que se desean tomar en cuenta). Se considerará como perturbación cualquier variable de entrada que se desee tomar en cuenta para calcular la acción de control y sobre la cual no se pretenda actuar. Además, en cada controlador se tiene la salida de control 𝑶𝑼𝑻 (variables de manipulación generadas por el controlador). Se utilizan adicionalmente las variables discretas 𝑴𝑶𝑫𝑬 (indica si el controlador funciona en modo automático o manual) y 𝑨𝒍𝒕𝑪𝒐𝒎𝑹 / 𝑨𝒍𝒕𝑪𝒐𝒎𝑾 (variables de comprobación de comunicación). La estrategia estándar permite añadir lógica complementaria utilizando los llamados bloques lógicos. Estos permiten realizar acciones a partir de condiciones lógicas simples determinadas con base en los valores de las variables de entrada y salida de los controladores. La estrategia estándar es recomendada cuando no se requieren acciones que vayan más allá de decisiones basadas en comparaciones, conjunciones, disyunciones o negaciones, es decir, operaciones basadas en el resultado de igualdades, desigualdades u operadores tipo Y, O y NO. Es importante considerar que, al definir los controladores, se requieren declarar no solo las variables a emplear por el Procesador, sino todas las variables que se pretendan utilizar en el resto de los módulos de la aplicación (incluyendo variables de operación utilizadas por el Supervisor o variables de simulación que se empleen en el modulo de Simulador) y que requieran ser conservadas en memoria, almacenadas o enviadas de un módulo a otro.. Estrategia personalizada Su utilización se recomienda para los casos en los que se requiere la implementación de estrategias de control complejas, o bien, de decisiones lógicas que no puedan ser implementadas utilizando la estrategia estándar y sus bloques lógicos. Las estrategias personalizadas se desarrollan en el ambiente de programación de LabVIEW y sus variables de funcionamiento son semejantes a las de la estrategia estándar. La ventaja de utilizar esta herramienta de programación gráfica es que facilita la implementación de cualquier acción o lógica de control deseada; además, la programación se realiza en un entorno que simplifica la visualización y entendimiento de las acciones e interconexiones. 27.
(48) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. comprendidas en las estrategias que se desean implementar. La programación se vale de instrumentos virtuales (VI) propios del software ADEX, como los conectores para lectura y escritura de datos, así como los propios controladores ADEX. El presente trabajo de investigación emplea aplicaciones diseñadas utilizando estrategias personalizadas, por lo que su método de implementación se ejemplifica en el Anexo A.. Definición de entradas, salidas y modo de comunicación Tras haber definido las estrategias de control y tras declarar las variables a utilizar en la aplicación de control, se debe especificar la manera en que se obtendrán las diversas entradas y salidas de proceso, que generalmente se leerán o escribirán sobre variables externas al sistema a través de uno o más protocolos de comunicación. El apartado para Definición de entradas y salidas (“IO Definition”) muestra las variables de proceso previamente creadas al definir los controladores y permite elegir, para cada una, el tipo de comunicación que se desea utilizar para su obtención o escritura, según sea el caso, pudiéndose utilizar drivers de OPC, FieldPoint o Matlab, entre otros. En el caso de que la variable se obtenga de procesos simulados, ésta deberá ser asignada al módulo de simulación (SIM). En la Figura 2.9 se muestra el apartado de la plataforma para la definición de entradas y salidas. En el ejemplo, una pareja de variables de entrada análogas son obtenidas del módulo de simulación. El manejo del módulo de simulación se aborda más adelante.. Definición de rangos de las variables de entradas y salida Para las variables análogas definidas en la estrategia, es posible definir el rango de variación que éstas podrán tener, especificando valores máximos y mínimos. Esto se realiza en el apartado Rango de entradas y salidas (“IO Range”).. 28.
(49) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. Figura 2.9. Apartado para definición de entradas y salidas.. Definición de valores iniciales de las variables de entradas y salida Como se mencionó anteriormente, existen variables utilizadas en la ejecución de la estrategia de control asignadas a memoria y otras provenientes de valores de operación (comúnmente del panel de supervisión). Para dichas variables, pudiera requerirse definir ciertos valores iniciales, los cuales se pueden especificar en la sección de Valores iniciales (“Initial values”) para cada tipo de variable. Por defecto, estos toman el valor de cero tanto para variables análogas como digitales.. Configuración de los controladores ADEX Una vez diseñadas y validadas las estrategias y las variables de control, es posible especificar la configuración inicial para cada uno de los controladores ADEX implementados, mostrados en el apartado de Controladores (“Controllers”).. 29.
(50) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. En la Figura 2.10 se muestra dicho apartado para un proyecto con dos controladores. Note que se enlista cada controlador, incluyendo su nombre y tamaño (número de entradas por número de salidas). Adicionalmente, para cada controlador mostrado, es posible acceder a la ventana de configuración mostrada en la Figura 2.11; en ésta, se muestra la estructura de un controlador multivariable ADEX y los parámetros que pueden ser modificados para cada uno. Nótese de nuevo que cada controlador ADEX es de naturaleza multivariable y puede ser aplicado a procesos de múltiple entrada y múltiple salida (MIMO, por sus siglas en inglés), con 𝑚 entradas y 𝑛 salidas, es decir, de dimensiones 𝑚 × 𝑛. Se requiere que: . Se tenga una cantidad igual o mayor de entradas que de salidas, es decir, 𝑚 ≥ 𝑛.. . Un subconjunto de 𝑛 de las variables de entrada pueden ser manipuladas para controlar las 𝑛 variables de proceso.. . El resto de las variables de entrada, 𝑙 = 𝑚 − 𝑛 , son consideradas como perturbaciones y se tomarán en cuenta para determinar las variables de control.. Figura 2.10. Apartado de configuración de controladores.. 30.
(51) CAPÍTULO 2: CONTROL ADAPTATIVO PREDICTIVO EXPERTO. A B C. F. D. E. G. H. Figura 2.11. Ventana de configuración de los controladores ADEX. (A) Dominio de configuración, (B) Variable de proceso seleccionada, (C) Estado del controlador, (D) Bloque conductor, (E) Bloque de control, (F) Bloque experto, (G) Bloque de proceso, (H) Mecanismo de adaptación.. . Se tiene un máximo de variables de salida de 3 (𝑛 ≤ 3) con un máximo de 9 entradas (𝑚 ≤ 9).. Cada controlador se descompone internamente en un conjunto de 𝑛 controladores de múltiple entrada y una salida (MISO, por sus siglas en inglés). Es decir, si se tiene un controlador de 5 × 3 esto resulta equivalente a considerar tres controladores de 5 × 1. Con ello, a cada controlador MISO interno le corresponde controlar una sola variable de proceso (𝑃𝑉) a través de una sola salida de control (𝑂𝑈𝑇). Las cuatro entradas restantes son vistas como perturbaciones del sistema (𝑃𝐸𝑅𝑇). Partiendo de esta idea, la configuración de los controladores ADEX se realiza considerando cada controlador MISO interno de manera independiente. La Figura 2.11-B muestra el campo para la selección del controlador activo.. 31.
Figure




+7





Documento similar
En este ensayo de 24 semanas, las exacerbaciones del asma (definidas por el aumento temporal de la dosis administrada de corticosteroide oral durante un mínimo de 3 días) se
En un estudio clínico en niños y adolescentes de 10-24 años de edad con diabetes mellitus tipo 2, 39 pacientes fueron aleatorizados a dapagliflozina 10 mg y 33 a placebo,
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
dente: algunas decían que doña Leonor, "con muy grand rescelo e miedo que avía del rey don Pedro que nueva- mente regnaba, e de la reyna doña María, su madre del dicho rey,
E Clamades andaua sienpre sobre el caua- 11o de madera, y en poco tienpo fue tan lexos, que el no sabia en donde estaña; pero el tomo muy gran esfuergo en si, y pensó yendo assi
ATLAS está siendo desarrollado sobre la base de otra herramienta preexistente, TANGOW [4], que se utiliza como sistema soporte para la modelización y ejecución de los cursos
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
