Manipulación y visualización 3D de brazo robótico Mitsubishi
118
0
0
Texto completo
(2) 6. iNDICE DE TABLAS Página Tabla 1- Características de Actuadores. 26. Tabla 2- Tipos de Herramientas. 30. Tabla 3- Elementos Terminales con Tipo de Accionamiento. 30. Tabla 4- Parámetros de Denavit-Hartenberg. 37.
(3) 7. ÍNDICE DE FIGURAS Figura 1 2 3 4 5 6 7 8 9 10 11 12. 13 14 15 16 17 18 19 20. 21 22 23 24 25 26 27. 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42. Página Brazo Robótico Articulaciones Configuraciones Básicas Motor DC de Brazo Mitsubishi Encoder Incremental Sensor de Contacto Potenciómetro RV-Ml Movemasterex Matriz de Transferencia Dimensiones RV-Ml Movemasterex Diagrama de Conexión Iconográfico LabVIEW 2011 Software Implementado Menú Primitivas Simulación 3D Comunicación LabVIEW con DBMS Vinculación de datos LabVIEW-Microsoft Access Base de Datos para Puntos Base de Datos para Creación de Programa MRL Panel Principal de Simulación Panel Principal de Guardar Puntos Panel Principal de Guardar Puntos (Menú) Base de Dato de Puntos (Ángulos) Exportación de Datos a extensión .txt Archivo Puntos .txt Panel Principal Guardar Programa Panel Principal Guardar Programa (Menú) Base de Datos de Programa MRL Exportación de Datos de Programa a extensión .txt Archivo Programa .txt DAQ6008 Adquisición de Datos Entradas y Salidas DAQ Actuadores Brazo Mitsubishi Posición de Sensores Diagrama a Bloques del Sistema de Posición en Lazo Cerrado Amplificador Operacional LM741 Amplificador LM741 Conectado como Sumador El LM741 como Amplificador Inverso Controlador Proporcional Análogo con Amplificador LM741 Controlador Proporcional Análogo Numeración de Terminales de los Transistores TIP41C y TIP42C Control Proporcional Análogo para Regular Sistema de Posición con DAQ6008 NI. 23 24 25 27 28 28 29 33 34 35 42 42 43 44 45 47 47. 48 48 49 49 50 50 51 51 52 53 53 54 55 55 56 57 57. 58 59 59 60 60 61 62 63.
(4) 8. Figura. 43 44 45. Página Parte Interna Gabinete Parte Externa Gabinete Proyecto Final. 63. 64 64.
(5) 9. ÍNDICE GENERAL. Dedicatoria Agradecimiento Índice de Tablas Índice se Figuras Índice General. Página 3 4 6 7. 9. Capítulo 1 - Introducción. 11. 1.1 Introducción 1.2 Motivación 1.3 Antecedentes 1.4 Hipótesis 1.5 Objetivos 1.6 Alcances y Limitaciones. 11 12 13 13 14 14. Capítulo 2 - Estado del Arte. 15. 2.1 Tesis Realizadas Dentro del Sistema ITESM 2.1.1 Interfaz de usuario para el Robot PUMA 560 de UNIMATION 2.1.2 Control de Posición para un manipulador robótico utilizando retroalimentación difusa visual basada en imagen con cámara fija. 2.1.3 Laboratorio Visual de Robótica Móvil 2.1.4 Laboratorio Visual de Robótica Móvil en esquema de Coordinación Concurrente 2.2 Tesis e Investigaciones Fuera del Sistema ITESM 2.2.1 Series Elastic Actuator Control of a Powered Exoskeleton 2.2.2 Development and Experiments of a Robot Assisting Photodynamic Therapy for Port Wine Stains 2.2.3 Methodology for the Sizing of Air Muscles in a Robotic Ann 2.2.4 Motion Planning and Control of Interactive Humanoid Robotic Anns 2.3 Puntos de Partida. 15 15 16 16 18 18 18 18. 19 19 19. Capítulo 3 - Modelación del Manipulador. 21. 3.1 Robot Industrial 3.1.1 Clasificación del Robot Industrial 3.1.2 Componentes de los Robots Industriales 3.1.3 Estructura de Robot Industrial Manipulador 3.1.4 Configuración Angular 3.2 Actuadores 3.2.1 Actuadores Eléctricos. 21 22 22 23 24 25 26.
(6) 10. 3.3 Sensores 3.4 Elemento Terminal. 27 29. Capítulo 4 - Cinemática del Brazo Manipulador. 31. 4.1 Manipulador RV-MOVEMASTEREX MITSUBISHI 4.2 Cinemática Directa de Manipuladores. 31 33. Capítulo 5 - Resultado: Diseño de Manipulación y Visualización 3D. 41. 5.1 LabVIEW: Software de Visualización y Manipulación 5.2 Tarjeta de Adquisición de Datos 5.3 Diseño de Circuito de Comunicación 5.3.1 Circuito P (Proporcional) 5.3 .1.1 Amplificador Operacional 5.3.1.2 Sumador 5.3.1.3 Amplificador Inversor 5.3.1.4 Amplificador de Potencia 5.3.2 Sistema de Lazo Cerrado con Controlador Proporcional. 41 54 56. 58 58 59. 60 60 62. Conclusiones. 65. Bibliografía. 67. ANEXO A: Tablas de Relaciones ANEXO B: Datasheet DAQ6008 ANEXO C: Datasheet LM741 ANEXO D: Datasheet TIP41C ANEXO E: Datasheet TIP42C. i ü iii iv V.
(7) 11. CAPÍTULO 1 INTRODUCCIÓN 1.1 INTRODUCCIÓN La modelación y simulación por computadora de los movimientos de cualquier robot, consiste en la implementación de un sistema computacional que realiza la adquisición y procesamiento de datos, con la cual se pretende hacer la simulación y manipulación de los movimientos del brazo MOVEMASTEREX de Mitsubishi en tiempo real y a la par el desarrollo de programas en lenguaje Mitsubishi Robot Language (MRL). Con la ayuda del software LabVIEW, Microsoft Access y Proteus,. se programaran y se. disefiaran las herramientas necesarias para la manipulación y simulación del brazo robótico Mitsubishi, haciendo una interfaz hombre-máquina en tiempo real, generando bases de datos. El proyecto a desarrollar tiene dos vertientes: teórica y práctica. En el aspecto teórico se reúne las aportaciones de la automatización y la informática. Por el lado práctico o tecnológico encontramos aspectos de construcción (mecánica, electrónica), y de gestión (programación). La robótica, pues, presenta un marco de carácter multidisciplinario. El objetivo es mostrar el diseño para la construcción de circuitería de manipulación y un simulador de brazo manipulador de 5 Grados de Libertad (g.d.l.), que nos permita guardar datos de posición y generar programa MRL, en un ambiente tridimensional. Este programa será de utilidad para la enseñanza didáctica de la robótica como herramienta de apoyo a profesores y alumnos. Este trabajo se apoya en el modelo matemático del robot de 5gdl MOVEMASTEREX de Mitsubishi para la construcción de un simulador en visualización 3D. Se utilizará como.
(8) 12. herramientas el programa de control virtual de National Instrument "LabVIEW ver 2011 ", y las librerías de visualización en 3D. Para la construcción del modelo que da forma al brazo manipulador de 5 gdl se hará uso de la librería 3D Picture Control de OpenGL para LabVIEW [1]. Dicha librería incluye menú de primitivas, es decir, polígonos tales como cubo, cilindro, cono, esfera y toroide. Así como funciones de rotación y traslación, para la parte del desarrollo del programa MRL, se implementará una base de datos en la cual se guardarán los puntos y se generarán los programas necesarios, con la ayuda de la librería Database Connectivity.. 1.2 MOTIVACIÓN El revisar las oportunidades de desarrollo de este tipo de proyectos, surgió un gran interés para desarrollar una interfaz amigable para la manipulación de robots manipuladores, especialmente, Robot Mitsubishi Movemasterex. A lo largo de la historia el hombre ha buscado distintas maneras de hacerse de una vida más fácil, valiéndose de diversas herramientas para poder lograr esto. En la actualidad el ser humano se ha apoyado en la tecnología para poder incursionar en terrenos tal vez desconocidos para él, o simplemente, con el único objetivo de desarrollar tareas menos difíciles en las que su esfuerzo sea el mínimo. Para las industrias el manejo de información, así como la optimización de los procesos de producción, son dos temas que han tomado importancia en los medios actuales de producción, sobre todo cuando se habla de automatización de procesos e integración en las empresas, el uso de bases de datos, correo electrónico y del intemet hacen cada vez más necesarias la información y la automatización en tiempo real, desde la comercialización hasta la fabricación, para ofrecer al cliente productos que se ajusten exactamente a sus necesidades.[2] Se puede decir que la competitividad de las empresas depende más de los resultados que se obtengan del proceso de manufactura, lo cual implica, que un factor importante de éxito es la excelencia operativa [3]..
(9) 13. 1.3 ANTECEDENTES , Para el desarrollo del presente proyecto, se tuvo que iniciar una previa investigación de proyectos con un enfoque similar a la temática de investigación, para poder hacer comparaciones con los mismos y encontrar puntos en los cuales se permitiera obtener una referencia para la elaboración de dicha investigación, durante el proceso se encontró una tesis de grado que toma por nombre. "lnteñaz de usuario para el robot puma 560 de Unimation" [2] la cual cumple con uno de los objetivos de este proyecto, el diseño de una interfaz de comunicación hombre-máquina, tomando como referencia un punto de aplicación que el autor de esa tesis deja como abierta para futuras investigaciones, la cual es, la simulación del comportamiento del Brazo robótico en 3D, basados en ese punto se aplicó como extra para completar la investigación, una interfaz en la cual se pennitiera la simulación en 3D junto con la manipulación del brazo en tiempo real. Para la implementación de estos objetivos, se sustituyo el brazo manipulador PUMA 560 por el brazo INDUSTRIAL. MICRO-ROBOT. SYSTEM. Modelo. RV-Ml. MOVEMASTEREX. de. MITSUBISHI. Ya presente el caso de estudio, se procedió a la investigación de software para la visualización 3D y manipulación del brazo, tomando como principales LabVIEW, Microsoft Access y Solid Edge, pero con la constante investigación y descubrimiento de nuevos software estos fueron cambiando. En principio se pretendía hacer el cambio del software que nos hiciera la simulación 3D (SolidEdge) y cambiarlo por Roboworks. Se empezaron a diseñ.ar prototipos de simulación en Roboworks, pero se encontró un gran inconveniente con él software, este era un software muy amistoso y fácil de trabajar, solo que, como era una versión para estudiantes, no se prestaba para cumplir con uno de los objetivos, el cual es diseñar un software ejecutable, para ello se decidió realizar la programación en el software iconográfico LabVIEW.. 1.4 HIPÓTESIS Creación de una interfaz de usuario para el robot RV-Ml MOVEMASTEREX de MITSUBISHI, enfocado a las necesidades del Laboratorio de Sistemas Integrados de Manufactura y para futuras aplicaciones en la industria automotriz con robots con funcionamiento similar. Facilitando la enseñanza para manipulación de este tipo de brazo robótico..
(10) 14. ·l.5 OBJETIVOS •. Manipular y simular el movimiento de brazo robótico con la ayuda de programas de manipulación virtual.. •. Programar On-line puntos y secuencia de movimientos, implementando base de datos.. •. Diseñ.ar y construir circuitería para manipulación de brazo robótico, con la ayuda de programas de disefio y simulación electrónica.. 1.6 ALCANCES Y LIMITACIONES •. Crear interfaz de usuario para el robot RV-Ml MOVEMASTEREX de MITSUBISHI, permitiendo manipular el robot.. •. El usuario manipulará cada uno de los movimientos del robot directamente de la PC en donde se tendrá la visualización de los movimientos.. •. La simulación de los movimientos comprobará la secuencia de instrucciones que deberá ejecutar el manipulador, se generarán los programas del Robot en lenguaje Mitsubishi Robot Language (MRL).. Una limitante que se tomó en cuenta, es la aplicación de este sistema para otro tipo de robot manipulador, se pretendió que con el mismo software sea posible controlar otro tipo de brazos manipuladores, pero para esto se tuvo que hacer modificación a la mayor parte del programa, por lo tanto, esto limita a trabajar con el robot RV-Ml MOVEMASTEREX de MITSUBISHI..
(11) 15. CAPÍTUL02 ESTADO DEL ARTE. Uno de los puntos clave de los objetivos establecidos, es la identificación de las tesis que se realizaron dentro del sistema ITESM, las cuales permitieron generar y desarrollar un enfoque al tema de investigación, posteriormente se investigó sobre tesis fuera del sistema ITESM denotando que estas tesis solo fueron como una guía para el desarrollo del documento.. 2.1 TESIS REALIZADAS DENTRO DEL SISTEMA ITESM: A continuación se describirá de forma general los proyectos realizados dentro del sistema ITESM, los cuales implican la investigación de interfaz de usuario para la manipulación de brazos robóticos hasta la implementación de laboratorios virtuales, todos estos, implementados para la enseñanza de la robótica.. 2.1.1.- INTERFAZ DE USUARIO PARA EL ROBOT PUMA 560 DE UNIMATION Desarrollado en el Instituto Tecnológico de Estudios Superiores de Monterrey Campus Monterrey por el Ing. Julio Arturo Olivares Fong en mayo 2002, el objetivo de esta tesis era diseñar y desarrollar un programa que funcionara como una interfaz de usuario, para facilitar la enseñanza de tareas, la programación y la ejecución de programas del robot PUMA 560 de Unimation, además de brindar la opción de guardar la información generada en el disco duro de una computadora o en un disco de 3.5 [2].
(12) 16. 2.1.2.-. CONTROL. DE. POSICIÓN. PARA. UN. MANIPULADOR. ROBÓTICO. UTILIZANDO RETROALIMENTACIÓN DIFUSA VISUAL BASADA EN IMAGEN CON CÁMARA FIJA. Realizado en el Instituto Tecnológico de Estudios Superiores de Monterrey Campus Monterrey por el lng. César Alberto Villanueva Garza en mayo 2004. El proyecto consta de cuatro bloques principales: el de visión, el de control, el de orientación y el del robot. El bloque de visión, ubica la posición en parámetros de la imagen, tanto del objetivo como del efector, con el cálculo de los momentos. [3] Puesto que el manipulador utilizado, sobre el cual se implementa la retroalimentación difusa visual consta de 6 g.d.l., no basta exclusivamente con definir la posición cartesiana a la que se debe desplazar, sino que se necesita además calcular su orientación. Adicionalmente, la nueva posición definida por el controlador difuso, puede ubicarse fuera del espacio de trabajo. El bloque de orientación elimina ambos problemas, calculando orientaciones adecuadas para la cinemática inversa interna del manipulador y asegurando que la nueva posición esté dentro del espacio de trabajo del manipulador. El proyecto se basa en la manipulación del brazo mediante el seguimiento de puntos indicados a la cámara.. 2.1.3.- LABORATORIO VIRTUAL DE ROBÓTICA MÓVIL En el campus Cuemavaca del Instituto Tecnológico y de Estudios Superiores de Monterrey, se elaboró un laboratorio virtual basado en el World Wide Web, 2005. Este laboratorio virtual le permite a un estudiante diseñar las características de un robot móvil para después situarlo en un evento simulado de seguimiento de línea. Durante el curso de esta competencia, el estudiante puede controlar los movimientos y la velocidad del robot. [4] El laboratorio virtual presenta cuatro experimentos. Un experimento de seguimiento de línea donde se puede controlar el robot de manera manual, se puede modificar las características fisicas (configuración mecánica, largo y ancho del robot y dimensión de las llantas). El sistema brinda una retroalimentación basada en el desempeño de alumno a lo largo de la competencia (tiempo y.
(13) 17 precisión del seguimiento) y basada en la exploración del alumno dentro del experimento (si modificó alguna de las características del robot). El segundo experimento presenta características similares que el anterior, pero añade la posibilidad de controlar el robot por medio de la información recolectada en tres sensores. En este caso, la retroalimentación reúne la información anterior más la aportada por los sensores. El tercer experimento es similar al segundo, pero esta vez la pista no se muestra en la parte simulada por lo que el alumno se debe guiar únicamente por la información presentada por los sensores. El último experimento permite la inserción de un programa de control para el robot. Este programa debe contener instrucciones propias del lenguaje de programación utilizado dentro de este experimento. Dado que el programa es interpretado y no es compilado, la velocidad de la simulación es lenta con respecto a los otros tres experimentos.Esta herramienta permitió explorar las características de comportamiento y aprendizaje de un grupo de alumnos, quienes fueron divididos en dos grupos de estudio: uno de ellos usaría la herramienta sin su parte tutor inteligente mientras que el otro la utilizaría con la parte tutor inteligente. El objetivo de este estudio era observar si los estudiantes que tenían alguna herramienta de apoyo a su aprendizaje (en este caso, un laboratorio virtual con tutor inteligente) mejoraban de alguna manera su adquisición de conocimiento y presentaban un mejor aprovechamiento de la enseñanza aportada. En la evaluación del sistema, se aplicó al grupo completo de estudiantes un examen diagnóstico. En base a este examen diagnóstico se observó que los resultados arrojados por la categorización inicial del sistema eran congruentes con los resultados obtenidos en el examen. Después de que los alumnos realizaron los experimentos presentados, se recolectaron los valores de los objetivos de aprendizaje que se habían guardado en la base de datos del sistema. Con estos datos, se pudo observar que los alumnos que no tenían el apoyo del módulo tutor inteligente presentaban un desempeño menor que aquel de los alumnos con apoyo del módulo..
(14) 18. 2.1.4.- LABORATORIO VIRTUAL DE ROBÓTICA MÓVIL EN ESQUEMAS DE COORDINACIÓN CONCURRENTE Realizado en el Instituto Tecnológico de Estudios Superiores de Monterrey Campus Cuemavaca por el Ing. Gilberto Huesca Juárez, noviembre 2006, el proyecto se basa en la extensión de modelos que permitan la interacción a distancia de varios estudiantes dentro de un mismo experimento que se desarrolle al mismo tiempo en un laboratorio virtual. [5] Otra aportación es el desarrollo de un módulo de programación para el control automático los robots móviles dentro del laboratorio virtual. Este módulo proporciona una interfaz para que el estudiante pueda programar un robot móvil que después será incluido en un experimento de seguimiento de línea dentro del laboratorio virtual.. 2.2 TESIS E INVESTIGACIONES FUERA DEL SISTEMA ITESM: A continuación se describirá de forma general los proyectos realizados fuera del sistema ITESM, los cuales implican la investigación de aplicaciones de brazos robóticos, principalmente la implementación de esta tecnología en la medicina.. 2.2.1. - SERIES ELASTIC ACTUATOR CONTROL OF A POWERED EXOSKELETON Una órtesis motorizada de una extremidad superior basada en el pasivo del sistema WREX (producto ortopédico) se está desarrollando. La órtesis es un brazo de 4 g.d.l. controlado por entradas que el usuario proporciona, en su caso son fuerzas residuales. El brazo está destinado a personas con debilidad neuromuscular debido a la distrofia muscular o la atrofia muscular espinal. La conformidad se logra mediante el uso de una serie elástica del actuador (MAR) y colocar resortes de torsión entre los motores y la WREX. [6]. 2.2.2. - DEVELOPMENT AND EXPERIMENTS OF A ROBOT PHOTODYNAl\flC THERAPY FOR PORT WINE STAINS. ASSISTING. Proyecto diseñado para la ayuda de médicos en el tratado de las Manchas de Vino (Port Wine Stain (PWS)), ya que en las terapias normales las radiaciones láser que se les implementaban eran desiguales, por lo tanto se diseño un brazo robótico que ayudara al médico a radiar las zonas de forma uniforme. [7].
(15) 19. 2.2.3. - METHODOLOGY FOR THE SIZING OF AIR MUSCLES IN A ROBOTIC ARM Este artículo discute una metodología para el dimensionamiento de músculos de aire para ser utilizados en la aplicación de un brazo robótico. Mediante una evaluación completa de la cinemática y la dinámica del brazo, se asegura la metodología desarrollada para una rápida y correcta dimensión de los músculos de aire requerido para satisfacer las especificaciones de los brazos. Esta metodología se aplicó a un brazo robótico capaz de levantar 5 [kg] al menos. Los resultados obtenidos por el uso del algoritmo de tamañ.o son plenamente satisfactorios. [8]. 2.2.4. - MOTION PLANNING AND CONTROL OF INTERACTIVE HUMANOID ROBOTIC ARMS En este trabajo, se propone un brazo robótico que su manipulación sea análoga al movimiento de extremidades superiores humanas. El brazo robótico propuesto está diseñ.ado como un robot de siete de grados de libertad de configuración. Para aumentar la interactividad con los seres humanos, un sensor de fuerza de seis ejes se adjunta en la muñ.eca del robot para capturar la fuerza aplicada sobre el brazo robótico. Posteriormente, el brazo robótico se mueve siguiendo la fuerza aplicada en la muñ.eca. Además de la conformidad de movimiento humano, el brazo robótico es capaz de planificar de forma dinámica trayectorias espaciales para diversas líneas rectas, círculos, o caminos predefinidos. Especialmente, debido a la estructura de este brazo robótico de 7 grados de libertad, no se pudo encontrar una solución única para la cinemática inversa. [9]. 2.3 PUNTOS DE PARTIDA. Basados en las investigaciones anteriores, esta tesis toma como iniciativa los siguientes puntos, los cuales fueron puntos mencionados por algunas de las tesis anteriores, como puntos futuros de investigación: •. Manipulación y Visualización 3D: Este punto es propuesto por la tesis INTERFAZ DE USUARIO PARA EL ROBOT PUMA 560 DE UNIMATION, se implemento la parte de la manipulación agregando visualización 3D de los movimientos generados para el brazo robótica Mitsubishi.. •. Creación de programa desarrollador de Lenguajes para Brazo Robótico: después de realizar la investigación se propuso diseñar un programa capaz de generar un lenguaje de programación que se pudiera descargar al brazo manipulador Mitsubishi.. •. Creación de interfaz Amigable para el aprendizaje de este tipo de tecnologías: basados en los métodos implementados en la tesis LABORATORIO VIRTUAL DE ROBÓTICA.
(16) 20. MÓVIL EN ESQUEMAS DE COORDINACIÓN CONCURRENTE, se desarrollo la idea de generar el programa que permitiera la simulación de los movimientos del manipulador Mitsubishi, antes de ponerlo en ejecución.. IBLIOTEC#.
(17) 21. CAPÍTUL03 PARTES DEL MANIPULADOR. La investigación en robótica se extiende a campos muy variados por lo que se divide en grandes áreas de investigación. Se mostrara la definición de robot industrial y se presentaran los componentes elementales del Robot Mitsubishi, tales como, su clasificación de acuerdo a sus caracteristicas, su estructura de acuerdo a su tipo de articulación, su configuración básica para posteriormente definir los actuadores que generan la fuerza para el movimiento y los sensores que proporcionarán la ubicación del robot.. 3.1 ROBOT INDUSTRIAL Se define como: "Manipulador programable y multifuncional diseñ.ado para mover materiales, partes, herramientas o dispositivos específicos mediante movimientos programados para realizar diferentes tareas" [ 1O]. Un manipulador mecánico consiste en una secuencia de cuerpos rigidos llamados elementos, conectados mediante articulaciones prismáticas o de revolución. Cada par articulación-elemento constituye un grado de libertad, esto se refiere al número mínimo de parámetros que necesitamos especificar para determinar completamente la velocidad de un mecanismo o el número de reacciones de una estructura, más concretamente, los grados de libertad son el número mínimo de velocidades generalizadas independientes necesarias para definir el estado cinemático de un mecanismo o sistema mecánico. Las articulaciones y elementos se enumeran hacia fuera desde la base; así la articulación 1 es el punto de conexión 1 y la base soporte. Cada elemento se conecta, a lo más, a otros dos, así pues no se forman lazos cerrados..
(18) 22. 3.1.1 Clasificación del Robot Industrial No existe una única clasificación de los robots industriales, sin embargo podemos clasificarlos o agruparlos según diversas características, teniendo así las siguientes clasificaciones dadas para el Robot Manipulador Mitsubishi:. •. Clasificación en función al desarrollo de los microprocesadores:. MANIPULADORES, sistemas mecánicos multifuncionales, capaces de controlar sus movimientos, ya sea de manera manual, con secuencia fija o de secuencia variable. Estos equipos se adaptan muy bien a tareas sencillas y repetitivas. •. Clasificación según la Asociación Francesa de Robótica Industrial (AFRI). Tipo A, manipulador con control manual o telemando. •. Clasificación según la Federación Internacional de Robótica (por sus siglas en ingles, IFR), distingue cuatro tipos de robots:. Robot secuencial: Realiza una serie de movimientos destinados a cumplir una tarea, siguiendo un conjunto de instrucciones previamente programadas.. •. Clasificación en generaciones. Primera generación, el robot repite la tarea secuencialmente. No toma en cuenta las posibles alteraciones de su entorno.. 3.1.2 Componentes de los robots industriales Mecánicamente está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos. Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal), a este último se le conoce.
(19) 23. habitualmente como aprehensor, garra, pinza o gnpper, en otros términos, también se les identifica o relaciona con las partes del cuerpo humano. En esencia un robot industrial está formado de dos elementos, el manipulador (o "brazo" parte mecánica) y el controlador del robot. El controlador contiene el sistema microprocesador y las unidades de control de energía. El brazo es accionado por medio de energía eléctrica, en su caso, son los actuadores los que generan el movimiento.. A continuación se presenta un robot manipulador industrial de 5 g.d.l. Es importante definir que el efector final no se considera un grado de libertad. Además, entre mas sean los grados de libertad, es mayor la dificultad para manipularlo, debido a los requisitos de software.. BRAZO. --, __ --~T_E~J3~~':', ..,,,. .-<...,. DEDOS:. MANO. Figura 1. Brazo Robótico [ 11]. 3.1.3 Estructura de Robot Industrial Manipulador Los robots manipuladores son en esencia, brazos articulados, es una cadena cinemática abierta formada por un conjunto de eslabones o elementos de la cadena interrelacionados mediante articulaciones o pares cinemáticos, estas permiten el movimiento relativo entre los sucesivos eslabones [ 12]. Existen diferentes tipo de articulaciones, las más utilizadas se muestran en la figura 2, para el caso del robot manipulador Mitsubishi su principal articulación es la siguiente:. •. Las articulaciones con movimiento de rotación permiten la rotación alrededor de un eje de rotación siendo la más usada. Suministra un grado de libertad..
(20) 24. UQUEIIA. ARTICULACIÓN. GRADOS l.l&ERTAD. ROTACIÓN. 1. PRISMAllCA. CH..INDAICA. 2. PLANAR. 2. ~FéRICA {RÓTULA}. Figura 2. Articulaciones [ 12]. 3.1.4 Configuración Angular Existen 4 configuraciones básicas (figura 3), para el caso de estudio solo se describirá la configuración del Brazo Robótico de Mitsubishi: Configuración cartesiana Configuración cilíndrica Configuración polar o esférica Configuración angular.
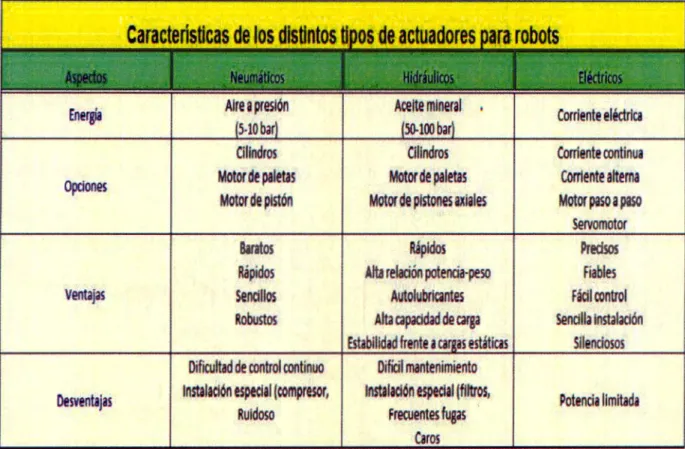
(21) 25. El brazo robótica Mitsubishi está constituido con una configuración angular, esta configuración es una estructura con tres articulaciones de rotación (3G o RRR). La posición del extremo final está dada en coordenadas angulares. La estructura tiene un mejor acceso a espacios cerrados y es fácil desde el punto de vista constructivo. Usualmente se empleada en robots manipuladores industriales, especialmente en tareas de manipulación que tengan una cierta complejidad. La configuración angular es la más utilizada en educación y actividades de investigación y desarrollo. [ 12]. c.,.,..,_. p. i a) 'f. Clllndllm p. 20. z. 1G. b). ?claf. p. 10. 2G. Angular. r. e:). ,. ~ )d) Figura 3. Configuraciones Básicas [ 12]. 3.2 ACTUADORES Los actuadores son los elementos que generan las fuerzas o pares necesarios para generar el movimiento al manipulador [ 12]. Basados en la tabla 1, los actuadores más empleados en robótica son: •. Neumáticos (cilindros y motores). •. Hidráulicos (cilindros y motores). •. Eléctricos (Motores DC,AC).
(22) 26. Características de los distintos ti os de actuadores ara robots Ener~a. Opciones. Ventajas. Desventajas. Aire apresión 5-10 bar Cilindros Motor de paletas Motorde pistón. Aceite mineral S0.100 bar Cilindros Motor depaletas Motordepistonesaxiales. Baratos Rápidos Sencillos Robustos. Rápidos Alta relación potencia-peso Autolubrlcantes Alta capacidad de carga Estabilidad frente acar asestáticas Dificultad de control contínuo Difícil mantenimiento Instalaciónespecial (compresor, Instalación especial (filtros, Ruidoso Frecuentes fugas Caros. Corrienteeléctrica Corrientecontinua Corrientealterna Motorpasoapaso Servomotor Precisos Fiables Fácil control Sencilla instalación Silenciosos Potencialimitada. Tabla 1. Características de Actuadores [ 13). 3.2.1 Actuadores Eléctricos Las características de manipulación, sencillez y precisión de los accionamientos eléctricos, han hecho que sean los más usados en los robots industriales, el robot manipulador Mitsubishi cuenta con 6 motores eléctricos, ver figura 4, los cuales le proporcionan el movimiento.. Motores de corriente continua (OC) ./ Controlado por voltaje de armadura ./ Controlados a través de la corriente de excitación.
(23) 27. Figura 4. Motor OC de brazo Mitsubishi. 3.3 SENSORES. La utilización de sensores externos permite a un robot interactuar con su entorno de una manera más flexible, esto está en contraste con operaciones pre programadas en las cuales a un robot se le "enseña" para efectuar tareas respectivas mediante un conjunto de funciones programadas. [ 1O]. Las funciones de los sensores del robot se pueden dividir en dos categorías principales:. Estado interno: estos tratan con la detección de variables tales como la posición de la articulación del brazo, que se utiliza para controlar el robot.. Estado externo: estos tratan con la detección de variables tales como alcance, proximidad y contacto. [ 1O]. El robot manipulador Mitsubishi cuenta con sensores internos, ya que es un robot de primera generación, no obtiene información del exterior, a continuación se muestran los sensores con los que cuenta el manipulador y los implementados para este proyecto:. Encoders incrementales: Constan de un disco transparente con una serie de marcas opacas. colocadas radialmente y equidistantes entre sí, de un sistema de iluminación y de un elemento fotorreceptor. El eje cuya posición se quiere medir va acoplado al disco, a medida que el eje gira se van generando pulsos en el receptor cada vez que la luz atraviese las marcas, llevando una.
(24) 28. cuenta de estos pulsos es posible conocer la posición del eje. La resolución depende del número de marcas que se pueden poner físicamente en el disco.. Aplicaciones: Dispositivo de control de puertas, Robótica, Maquinas de lente demoledor, Plotter, Soldadura ultrasónica.. Figura 5. Encoder Incremental. Contacto: Estos dispositivos, son los más simples, ya que son interruptores que se activan o desactivan si se encuentran en contacto con un objeto, por lo que de esta manera se reconoce la presencia de un objeto en un determinado lugar.. Aplicaciones: Robótica, fin de carrera de una banda transportadora.. Figura 6. Sensor de Contacto.
(25) 29. SENSOR IMPLEMENTADO: Potenciómetro: Es un resistor cuyo valor de resistencia es variable.. son unas resistencias. especiales que están formadas por una parte fija con la resistencia y una móvil en contacto con la misma que, al desplazarse, hace variar la resistencia entre las tomas. Consiguen variar la resistencia que ofrecen en función de un mayor o menor giro manual de su parte móvil, de esta manera, indirectamente, se puede controlar la intensidad de corriente que fluye por un circuito si se conecta en paralelo, o la diferencia de potencial al conectarlo en serie.. Aplicaciones: Los potenciómetros son usados principalmente como reóstatos conectando el cursor a uno de los terminales fijos, con el fin de controlar la corriente que circula a través de un circuito; o como divisores de voltaje, los cuales permiten obtener cualquier valor de voltaje comprendido entre cero y el máximo voltaje aplicado a sus extremos.. Figura 7. Potenciómetro. 3.4 ELEMENTO TERMINAL. Finalmente, el manipulador debe poseer un elemento terminal que le permita realizar diferentes labores. Según el uso, puede poseer una variedad de elementos terminales o herramientas, que combinadas con los movimientos del manipulador, lograran realizar los trabajos encomendados. Existen varios tipos, con diferentes accionamientos y para usos específicos como a continuación se detalla:.
(26) 30. Atornillado Fresa-Ira Pistola de intura Cañón láser. Dos electrodos que se cierran sobre la pieza a soldar A ortan el flu·o de electrodos ue se funde Para traba·os de fundición Suelen incluir la alimentación de tomillos Para rfilar, eliminar rebabas, ulir , etc. Para ulverización de intura Para corte de materiales, soldadura o ins ección Para corte de materiales Tabla 2. Tipos de Herramienta. Pinza de presión. Neumático o eléctrico. Pinza de enganche. Neumático o eléctrico. Ventosas de vacío Electroimán. Neumático Eléctrico. Transporte y manipulación de piezas sobre las que no importe presionar Piezas de grandes dimensiones o sobre las que no se puede ejercer .' res1on. Cuerpos con superficies lisas poco porosas, tales como cristal o plástico. Piezas ferromagnéticas. Tabla 3. Elementos terminales con tipo de accionamiento.
(27) 31. CAPÍTULO4 CINEMÁTICA DEL BRAZO MANIPULADOR La Cinemática es la rama de la mecánica clásica que estudia las leyes del movimiento (cambios de posición) de los cuerpos. Es necesario conocer las características cinemáticas del Robot Mitsubishi, ya que, estas permitirán el estudio de su posición, sin importar las fuerzas que generen su movimiento, implementando un método de Cinemática Directa llamado DenavitHartenberg (D-H), en donde se encontraron los puntos que ubican al efector final en el espacio 3D.. 4.1 MANIPULADOR RV-Ml MOVEMASTEREX MITSUBISID. El robot Mitsubishi MoveMaster EX es un robot vertical articulado con 5 g.d.l. Tiene una capacidad de carga de 1 kg y con una excelente velocidad y capacidad de repetición. RV-Ml Movemaster puede realizar prácticamente cualquier tarea, como es el caso de la cosecha (recolección) y movimientos con secuencias de manipulación complejas, que pueden ser programados y controlados con la consola de aprendizaje, así como con un PC, un PLC u otro sistema de control de procesos. El Brazo Manipulador Movemaster representa una importante mejora en el rendimiento de los robots industriales más convencionales, con una velocidad máxima. de. l000mm/sec. y. una. repetición. de. la. posición. de. +. /-0.3mm.. La unidad de mando se comunica con el Robot Movemaster RV-Ml a través de dos cables, dichos cables son conocidos como los puertos de interfaz. Las conexiones para equipos periféricos y los datos de proceso de E / S se encuentran en el panel posterior, esta unidad está equipada con dos desviaciones estándar (RS-232C y centronics) para la conexión a los.
(28) 32. ordenadores personales. Un EPROM programador está integrado en. la unidad como equipo estándar [ 14] .. Elementos: l Control alámbrico l Unidad de manejo l Brazo electromecánico Movimientos (ejes): Nos permite movimiento en 5 ejes Eje Control: JlX. J2Y J3 z J4P. 15 R TIPOS DE MOVIMIENTO: PTP: El tipo de movimiento PTP permite mover al robot articulación por articulación o punto por punto como lo dice su mismo nombre (Point To Point) por sus siglas en Ingles.. XYZ: Al activar este tipo de movimiento, el brazo robótico se moverá de tal manera que la posición de su herramienta (pinza), se mantenga deslizándose sobre unos eJes cartesianos fijos en la base del robot, paralelos al riel en que está montado.. TOOL: La opción TOOL arrastra los ejes XYZ a la muñeca de la herramienta del brazo del robot y estos ejes se trasladan según sea la posición de la misma..
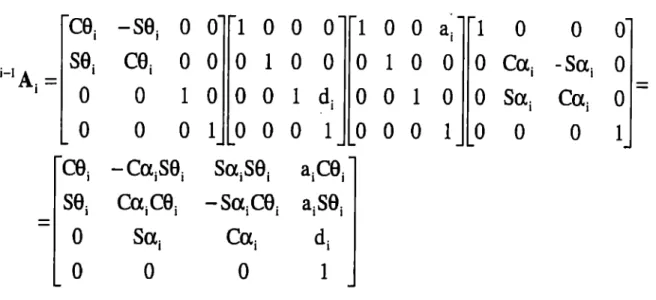
(29) 33. Figura 8. RV-M I Movemasterex [14]. 4.2 CINEMÁTICA DIRECTA DE MANIPULADORES La cinemática es la ciencia del movimiento que trata con el movimiento sin importar las fuerzas que lo causan. Mediante la cinemática se estudia la posición, velocidad, aceleración y todas las derivadas de las variables de posición (con respecto al tiempo o a otra variable). El número de grados de libertad que posee un manipulador es un ténnino usado en general para cualquier mecanismo. Dos problemas básicos se relacionan a la cinemática de manipuladores: la cinemática directa y la cinemática inversa. La cinemática directa se refiere al problema de geometría estática del manipulador mecánico para calcular la posición del efector final (pinza), mientras que la cinemática inversa se refiere al cálculo de todos los conjuntos de ángulos de cada articulación partiendo de una posición y orientación conocida para el efector final.. Para describir la relación rotacional y traslación entre los diferentes pares articulación-elemento, Denavit y Hartenberg propusieron un método matricial de establecer de forma sistemática un sistema de coordenadas para cada elemento de una cadena articulada. La representación de Denavit-Hartenberg (D-H) resulta en una matriz de transformación homogénea 4 x 4 que representa cada uno de los sistemas de coordenadas de los elementos en la articulación con respecto al sistema de coordenadas del sistema previo. De esta forma, mediante una secuencia de transformaciones, el elemento final del manipulador se puede transformar y expresar en las coordenadas de la base que constituyen el sistema inercial de este sistema dinámico de la siguiente forma [ 1O]..
(30) 34. i-1A. 1. =. oo. o o o 1 o o a¡ 1 o Se¡ C0¡ o o o 1 o o o 1 o o o Ca¡ o o 1 o o o 1 d. o o 1 o o Sa. o o o1 ooo 1 ooo 1 o o. ce.1 -se.1. 1. 1. C0¡. -ca.se. 1 1. Sa¡S0¡. a¡C0¡. S0¡. Ca¡C0¡. -sa.ce. 1 1. a¡S0¡. o o. Sa¡. Ca¡. d¡. o. o. 1. 1. o o -Sa. o Ca. o o 1 1. 1. Figura 9. Matriz de Transferencia. En donde la primer matriz hace referencia a la rotación, posteriormente la siguiente matriz muestra la traslación, ambas sobre el eje Z, para las siguientes dos matrices se tiene que, la primer matriz muestra la traslación y la segunda matriz la rotación, ambas sobre el eje X. Es importante denotar que el orden de las matrices altera el producto, por lo tanto, su correcta implementación proporcionara datos reales.. El problema de la cinemática directa se reduce a encontrar una matriz de transformación que relaciona el sistema de coordenadas ligado al cuerpo al sistema de coordenadas de referencia. Se utiliza una matriz de rotación 3x3 para describir las operaciones rotacionales del sistema ligado al cuerpo con respecto al sistema de referencia. Se utilizan entonces las coordenadas homogéneas para representar vectores de posición en un espacio tridimensional, y las matrices de rotación se ampliaran a matrices de transformación homogénea 4x4 para incluir las operaciones traslacionales del sistema de coordenadas ligado al cuerpo [10], este método es conocido como Método de Denavit-Hartemberg.. Los parámetros de Denavit-Hartenberg escogen cada trama en una forma particular de tal manera que sólo necesite 4 parámetros para describir su configuración relativa entre tramas consecutivas. A cada articulación se le asigna un eje coordenado, utilizando la notación de Denavit-Hartenberg, sólo se necesitan 4 parámetros para describir cómo un eje (i) se relaciona con el anterior eje coordenado (i-1). [15].
(31) 35. Las variables o parámetros: a, a, d, 0. ai = La distancia desde Zi hasta Zi+ 1 medida a lo largo del eje Xi ai = El ángulo entre Zi y Zi+ 1 medido alrededor de Xi di= La distancia desde Xi-1 hasta Xi medida a lo largo de Zi 0i = El ángulo entre Xi-1 y Xi medido alrededor de Zi. Usualmente se escoge ai > O dado que corresponde a una distancia, sin embargo, ai, di, 0i son cantidades signadas.. Al igual que una matriz homogénea que describe la cinemática directa de un robot, la matriz de Denavit-Hartenberg es una matriz de trasformación de un eje coordenado al siguiente. Utilizando series de multiplicaciones de matrices de Denavit-Hartenberg y la tabla de parámetros.. Para definir la cinemática será necesario contar con un modelo que defina la apariencia del manipulador. Este modelo debe mostrar la configuración que tendrá, es decir cómo estarán distribuidos los grados de libertad, la posición y giro de los actuadores, la longitud de los eslabones, etc.. A continuación se presenta el modelo del RV-Ml MOVEMASTEREX. En la Figura 10 se muestra la apariencia del manipulador y algunas medidas representativas que serán mencionadas durante la formulación de las ecuaciones. o. Figura 1O. Dimensiones RV-M I MOVEMASTEREX [ 14].
(32) 36. Con el modelo definido, es posible iniciar la formulación de las ecuaciones cinemáticas. Para ello es necesario previamente establecer sistemas de coordenadas en cada una de las articulaciones del robot, con lo que cada eslabón contará con un sistema de coordenadas propio. Los sistemas son colocados siguiendo los parámetros que se muestran a continuación:. •. El número de sistemas de coordenadas será igual a n+ 1, donde n es el número de grados de libertad del manipulador. Para el manipulador de 5 GDL (n=5), fueron asignados 6 sistemas de coordenadas.. •. Se colocó un sistema de coordenadas en la base fija del manipulador, este lleva la numeración O.. •. El eje z de cada uno de los sistemas de coordenadas coincide con el eje de giro de cada una de las articulaciones.. •. En el sistema O de la base, la colocación de los ejes x, verificando que se cumpliera únicamente la regla de la mano derecha tras colocar el eje z.. •. El eje x (xi) en los sistemas diferentes al de la base, fue colocado sobre la perpendicular que une los sistemas i-1 e i.. •. El eje y fue colocado cumpliendo la regla de la mano derecha.. •. El último sistema de coordenadas se colocó en el extremo del último eslabón del manipulador. Este sistema será paralelo al penúltimo, pues no posee articulación para alinearlo.. Definidos y colocados los sistemas de coordenadas, se procede a definir las matrices de transformación homogéneas que relacionen todos los sistemas entre sí, y así poder plantear la cinemática directa. Se comienza desarrollando las relaciones para los sistemas de coordenadas O y l.. La matriz de transformación homogénea debe ser una expresión que permita relacionar los sistemas O y 1, esta relación estará basada en los movimientos que debe hacer el sistema de coordenadas Opara llegar a la misma posición y orientación del sistema 1, así implementado para cada grado de libertad..
(33) 37. La tabla 4 muestra los parámetros de Denavit- Hartenberg:. l. 01. 90. L1. 2. 02. L2. 3. 03. o o. 4. 04. 90. L4. o o o o. 5. 0s. 90. o. ds. L3. Tabla 4. Parámetros de Denavit- Hartenberg. La matriz de transformación homogénea asociada, resultará de multiplicar las tres matrices representativas de los movimientos con sus respectivos valores aplicados al sistema 1. La representación de esta operación y la matriz resultante se puede observar en la siguiente matriz.. cos0 1 sen0 1. o o. l. o. o o. o. _ sen0 2. -. sen0 1 -cos0 1. 1. cos0 2. T12. o o. -sen0 2 cos0 2. o o. o. * T34. ~. = 1-1 o. o o. 1. COS0 4. o o. o. o. o. -sen04. L 2 • cos0 2 L2 · sen0 2. 1. COS03. o. o 1. o o. -sen0 3. L1 · cos0 1 L1 · sen0 1. o. 1. L3.. COS03. L 3 • sen0 3. o 1. 1.
(34) 38. T4s. cos05 -sen0'S sen0 5 cos05. = o o. o o. o o o o 1 ds o 1. = T(Z, 84) · p · T(y, a4) = o o 1 o o L4 cosa4 o o o o 1 o o o 1 -sena4 o 1 o o o 1 o o 1 o o o 1 o o. * T34. COS84 -sen84 sen84 COS84. o o. o o. T34. =. sena4. o. cosa4. o. o o o 1. cos8 4 - cosa4 -sen8 4 cos8 4 • sena4 L4 · COS84 sen8 4 · sena4 L4 · sen8 4 sen8 4 • cosa4 COS84 -sena4 o cosa4 o. o. o. o. 1. Definidas todas las matrices de transfonnación entre cada sistema de coordenadas, se procede a obtener una matriz que pennita relacionar todos los sistemas, de manera que se tenga la posición espacial del extremo del manipulador referida a la base fija en función a los giros de los actuadores. Para esto, únicamente se deben multiplicar todas las matrices de transfonnación obtenidas previamente, con lo que se obtiene una expresión como esta:.
(35) 39. nx = -cos0s sen 01 - cos01 sen (02+03+04) sen0s ny = cos01 cos0s - sen01 sen (02+03+04) sen0s nz = cos (02+03+04) sen0s. ox =-cos0s cos 01 sen (02+03+04) +sen0s sen01 oy =-cos0s sen 01 sen (02+03+04) - sen0s cos 01 oz = cos (02+03+04) cos0s. ax= cos01 cos (02+03+04) ay = sen01 cos (02+03+04) az = sen (02+03+04). X= cos81(L1+L2cos 82+L3cos(82+83)+L4cos (82+83+84)+dscos (82+83+84) Y= sen81(L1+L2cos 82+L3cos(82+83)+L4cos (82+83+84)+dscos (82+83+84) Z = L2sen 82+L3sen (82+83)+ L4sen (82+83+84)+ dscos (82+83+84). Donde los valores X, Y y Z, expresan la posición espacial del efector con referencia a la base fija, los otros valores de la matriz, representan la orientación del mismo.. Una vez encontradas las ecuaciones que muestran la posición del efector final (pinza) en el espacio, se implementaron en el siguiente capítulo para desarrollar el programa en el cual se pudo manipular las posiciones..
(36) 40.
(37) 41. CAPÍTULOS RESULTADOS: DISEÑO DE MANIPULACIÓN Y VISUALIZACIÓN 3D. En la historia de la automatización industrial, los periodos de cambio son rápidos y normalmente alineados a la economía mundial. El uso de la robótica industrial en conjunto con sistemas de diseño asistido por computadora (CAD, por sus siglas en inglés), caracteriza y lideran la automatización industrial llevándola hacia una transición sin precedentes. El presente trabajo se enfoca en la mecánica y manipulación de una de las formas de robot industrial, constantemente utilizadas en laboratorio de Sistemas Integrados de Manufactura como una herramienta de apoyo, implementando tecnologías de diseño y manipulación como es el caso de Labview, Access y Proteus.. 5.1 LABVIEW: SOFTWARE DE VISUALIZACIÓN Y MANIPULACIÓN. Se implementó como herramienta un entorno de programación gráfica usado por miles de ingenieros e investigadores para desarrollar sistemas sofisticados de medida, pruebas y control usando íconos gráficos e intuitivos y cables que parecen un diagrama de flujo (figura 11). Este programa de control virtual de National Instruments es conocido como LabVIEW 2011 (figura 12)..
(38) 42. 11 r21 ~Edit Item~: V~k.Je Chanae. ... ..1False .. ,.1 True •. _-,;.l_---l_lfp_,,_--------·--------·._..,'rl#l, 1 -. N¿ine. ~. 1---~Tvne~--~. -. Geometrv Definition 1----==1 •*oimensionesl ~ Posltion VJRT Perent (X Y 2~ ....______. •*-Posición WRT 1 Rotat1on WRT Parent idenrees' WRT 1. ~. ,trx.v z,. TYDO Geometrv Fle Path Jol,t. ~ion:. -~~-. Edit Item. cm-----~-. Cob-. update errors on •. non-tlTleout events. 1---hATlnn de MoY. I 1-i, ~ n de Arct-.vol. I. (keep< errors ti. "cleared"I. ~. 111--. ~ error de salida. -(!l=illl. };. :;;;;:;;;:;;;:;:;;:;;;;:;;;:;;;::;:1;:::::::::::;;:;:1;::~:t::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::_::....t:i_t:_=_=...J1-;;;;;-1-;;;;;-;;;;;_;;;;;_;;;;;_;;;;;-lfflt:4t-~-.-. .... Figura 11. Diagrama de Conexión Iconográfico.. Ofrece una integración incomparable con miles de dispositivos de hardware y brinda cientos de bibliotecas integradas para análisis avanzado y visualización de datos, todo para crear instrumentación virtual. La plataforma LabVIEW 2011 es escalable a través de múltiples objetivos y sistemas operativos.. LabVIEW.. Figura 12. Lab VIEW 201 1 Software implementado. Este software se ejecuta en un ordenador que tiene alojado unos elementos hardware concretos, tarjetas de adquisición de datos DAQ6008 (analógicos y digitales).. Este instrumento virtual permite manejar ese hardware mediante una interfaz gráfica de usuario que se asemeja al panel de mandos de los aparatos habituales (Osciloscopio, multímetro, etc.).
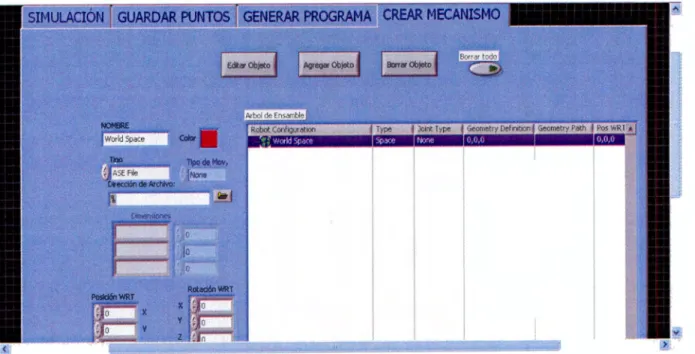
(39) 43. Mediante le representación en pantalla de los elementos gráficos de visualización y control que servirán de interfaz con el usuario, este observará los estados de las entradas seleccionadas en la pantalla e interactuar con las salidas directamente o mediante la ejecución de las rutinas que se han programado.. Para la construcción del modelo que da forma al robot de 5 g.d.l. se hace uso de la librería 30 Picture Control de OpenGL para LabVIEW, dicha librería incluye menú de primitivas, es decir, polígonos tales como cubo, cilindro, cono, esfera y toroide, así como funciones de rotación y traslación. El programa desarrollado fue útil para poder diseñar y manipular diferentes brazos manipuladores que cumplan con las características principales de un Brazo Robótica de 5 g.d.l. o en su defecto, es posible diseñar otro tipo de mecanismos que cuenten con 5 a 6 g.d.l., ya que la herramienta está habilitada para ello.. En la figura 13 se muestra la pantalla en donde se generan los meca111smos a manipular. Principalmente cuenta con un menú en donde el usuario crea sus objetos haciendo referencia de qué tipo de pieza es, que tipo de movimiento se generara (en dado caso de que la figura sea dinámica) y también es posible definir su tamaño y posición en el espacio X, Y, Z. También es posible editar los objetos una vez ya definidos, presionando en los botones de "Editar", "Agregar" o "Borrar Objeto".. Figura 13. Menú de Primitivas.
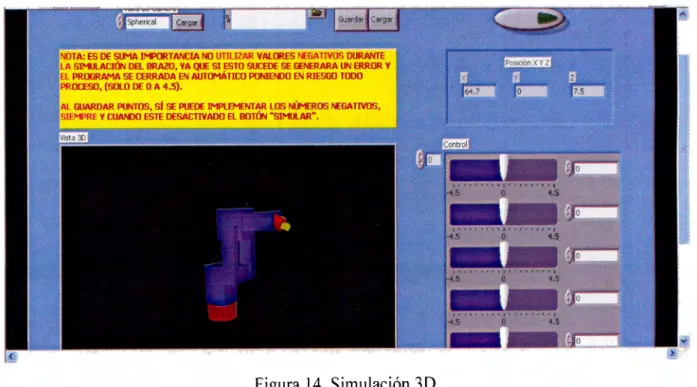
(40) 44. Una vez determinados los objetos es necesario mostrar la escena aplicando funciones de definición y colocación de cámara (simulación del observador), renderización y sombreado de los objetos (características de los materiales), color ambiente e iluminación (simulación de las variables del medio ambiente, como luz solar, lámparas, etc. que inciden sobre los objetos). Esto le da un realismo a la modelación y simulación gráfica en 30. La manipulación y Visualización del Brazo Robótico Mitsubishi, se realiza desde esta ventana, como se muestra en la figura 14, cuenta con barras deslizables, las cuales representan el voltaje equivalente al ángulo de posición que deseamos (Verificar ANEXO A), cada voltaje representa un ángulo diferente para cada eslabón, cabe mencionar que los ángulos son diferentes para cada eslabón. También es posible cargar archivos que fueron realizados y guardados con extensión *.dat.. Figura 14. Simulación 3D. Para el guardado de puntos en los cuales se posiciona el brazo, se implementó las librerías Database Connectivity de Labview en conjunto con el Software Microsoft Access para crear bases de datos de los puntos guardados y la generación del programa MRL que controlara al brazo Mitsubishi con su plataforma original. El manejo de Base de Datos se implementa para el almacenamiento de variables con el objetivo de registrar, consultar y realizar un posterior análisis de estos datos. La base de datos está.
(41) 45. compuesta por tablas y cada tabla está compuesta por columnas, también conocidas como campos [ 16].. Cada Campo (columna) tiene un tipo de dato, estos tipos de datos son definidos al hacer la tabla, los más comunes incluyen entero, doble, texto, fecha/hora y binario, los tipos de datos varían dependiendo de la base de datos (MSAccess, Oracle, SQL Server, etc.).. Lab VIEW se comunica con un Administrador de Base de Datos (DBMS) según se observa en la siguiente imagen:. Figura 15. Comunicación Lab VIEW con DBMS [ 16]. Como se observa en la figura 15, existen dos tipos de conexión, mediante ODBC con un archivo DSN (Data Source Name), también se puede realizar mediante un proveedor OLE DB mediante un archivo UDL (Universal Data Link) [ 16].. ODBC: Open Database Connectivity.
(42) 46. •. API (Application Programrning Interface) común para interfaces con diferentes bases de datos.. •. Solo para base de datos relacionales.. •. ODBC de sistema y usuario DSN o Contiene el nombre de la base de datos e información como el controlador ODBC o Se almacena en el registro del sistema o Acceso a cualquiera en el sistema o un solo usuario. OLE DB: Object Linking and Embedding Database •. Comunicación con varios tipos de DBMS. •. Proveedores de OLE DB nativo. •. Proveedor de OLE DB para ODBC. Archivo DSN (* .dsn) •. Se refiere a un Archivo especifico. •. No está restringido al usuario o al sistema. UDL •. Contiene información sobre el proveedor OLE DB e información del servidor, base de datos, etc.. •. Similar al Archivo DSN, pero utiliza ADO (ActiveX Data Objects) en lugar de ODBC. Para la parte de GUARDAR PUNTOS y GENERAR PROGRAMA MRL del presente proyecto se implementó un UDL con una extensión *.mdb para la base de datos generada en el software Microsoft Access. Para la conexión de LabVIEW con la base de datos de Access se implemento un Proveedor OLE DB Jet 4.0 para acceso a Access 2003-2007, entrando al menú Tools-Create Data Lin1cs, quedando la representación grafica de las conexiones mostradas en las figuras 16, 17 y 18:.
(43) 47. P1oveedotes de OLE 0B rt1. 1,. 111111111. 1. Microsoft Ollice 12.0Access Database Engine OLE DB P,ovi Mic,osoft OLE DB P10vide1lo, An,-ysis Se,vices 9.0. Mic,osoft OLE DBP,ovide, For Data Mining Se1vices Mic1osoft OLE DB P,ovider fo1lnde>1ing Service Mic1osolt OLE DB P,ov<fer 101 lnte,net Publishing Mic1osolt OLE DB P1ovider 101 ODBC D1ive1S Mic,osoft OLE DB P,ovider 101OLAP Se,vices 8.0 Micmsoft OLE DB Prov<fer lo, D,acle Microsoft OLE DB P,ov<!er lo, SQL Server Microsoft OLE 08 Simple Provider MSD ataShape Proveedo, de bases de datos OLE para servicios de directorio e. Figura 16. Vinculación de datos LabVIEW-Microsoft Access. Direccionamiento de datos a la base de datos ACCESS, se observa que desde el siguiente diagrama se han declarado las variables a utilizar durante la programación de archivos MLR. Ver figura 17.. 1. 1. TOS. ·- - ?1--- -- ~ PD. Pr~Userfot. PROGRAMA BASE. lnpt.( OI(. G3. Figura 17. Base de Datos para Puntos. G4. G5.
(44) 48. Muy similar al Guardado de Puntos, el Guardado de Programa cuenta con un direccionamiento de los datos a utilizar para el desarrollo de archivos MRL, estos datos se envían a la Base de Datos, donde posteriormente serán utilizados. Ver figura 18.. '. lm··· ·. .•. .. Prompt User for In ut7. ........ [i!]. Prompt User far Input2 OK. ,.. {)R. =. ·¡. '. . '. . . .J. Display Message to User2 Enable. r ...J. ,o¡y.l. l.¡'•~ GENERAR. 2. 1. Messa e OK. ERROR DE SALIDA 2. I ACCION. I PUNTO. I GRI PPER VEL. Figura 18. Base de Datos Para Creación de Programa MRL. Quedando como programa final, con la unión de todos los puntos para el diseño, manipulación de los elementos en 30, Guardar puntos y Generar programa, ver figura 19:. Figura 19. Panel Principal de Simulación..
(45) 49. Los puntos guardados, como se muestran en la figura 20, corresponden a los ángulos que se desplazaron los ejes del Brazo Mitsubishi, se realiza una relación entre puntos que van de -4.5 a 4.5 con los ángulos limite de cada eje, en el ANEXO A se puede identificar cierta relación.. SIMULACION GUARDAR PUNTOS GENERAR PROGRAMA CREAR MECANISMO. GUARDAR PUNTOS GUARDAR. Figura 20. Panel Principal de Guardar Puntos.. En el panel de guardar puntos se genera un sub-menú, el cual permite colocar el punto en la base de datos con una posición deseada, ver figura 21.. GUARDAR PUNTOS GENERAR PROGRAMA CREAR MECANISMO. ~. I>. Prompt User for Input. torio\TESIS\s~BASE DE DATOS.udl PUNTO EN DONDE SE GUARDARAN LOS ANGLlOS DE MOVIMIENTO: PUNTO:. 111 source OK. Figura 21. Panel Principal de Guardar Puntos (Menú)..
(46) so De forma inmediata esos puntos (ángulos) indicados en el panel de manipulación generada en Lab VIEW son guardados en la base de datos ACCESS como se muestra en la siguiente figura:. Herramientas de tabla Datos eidtmos. Todas las tablas PUNTOS. im. Huramient.u de bu, clt datos. PUNTOS : Base de datos (Formato de archivo de Accoess .... HOJa de datos. ~. -38A 16.11. PUNTOS : Tabla. 2. -20.0. - ;3. o.o. o.o. o.o. 172.0. 39.9 -46.8 57.2. 41.1. o.o. o.o. -32.3. -34.8 -34.8. 38A. 51 6. -24.3. -152.0' -S2.0. -1.5. o.o o.o. Vista Hoja de datos. Figura 22. Base de Datos de Puntos (Ángulos). Para crear el archivo .txt que es necesario para la descarga en el gabinete de control original del Brazo Mitsubishi, se utiliza una herramienta de Access que nos permite la exportación de nuestra base de a un Archivo .txt, el cual ha sido modificado, para dicha aplicación, mostrada en las siguientes figuras:. r1 '5( ]. Admlnl ,;f rar l,UCM dr- d<!!:! Ot. Toda,. fu tablas PUNTOS. 'ª"" ¡ ¡c,.. ,.,.... ~ --- 11 -. 1. X \~. 1. ...,... Vbt:.I HOJI de datos. Figura 23. Exportación de Datos a extensión .txt.
(47) 51. , ~ PUNTOS -Bloc de notas. (gf§rg). Archivo Edición Formato Ver Ayuda. : PD,1.00, 59.99,17.33,-32.26,26.40,-38.39 PD,2.00,-20.00,-24.26,-5.86,-8.39,16. 79 PD,3.00,0.00,0.00,0.00,0.00,0.00 PD,4.00,171.99,39.86,41.06,0.00,0.00 PD, 5.00,-151.99,-46.80,-32.26,-34.80,0.00 PD,6.00,-51.99, 57.20,-1.46,-34.80,38.39. Figura 24. Archivo Puntos .txt. Para Generar Programa sigue una secuencia muy similar a la de Guardar Puntos, solo que en esta etapa el sub-menú que aparece cuenta con 8 opciones, las cuales nos permiten desarrollar el Archivo MRL que será descargado en el gabinete de control original del Brazo Mitsubishi, ver figura 25.. SIMULACIÓN GUARDAR PUNTOS GENERAR PROGRAMA CREAR MECANISMO C:\DoC\Jllents and SettinQs\Ammisaddal Arciga\Escr~orio\TESIS\si\PROGRAMAl .t.d. NOTA: PARA PODER GEf\ERAR EL PROGRAMA QUE SE IMPLEMENTARA EN MITSUBISHI, ES NECESARIO PRESIONAR "GENERAR", SE DESPLEGARA UN M8'.Ú EL CUAL LE PERMITIRÁ SELECCIONAR LA ACCIÓN A REALIZAR.. ERROR DE SALIDA 2. PARA ESTE CASO LA DIRECCIÓN CORRECTA EN DONJE SE GUARDARAN TODOS LOS PASOS ES LA SIGUIENTE: C: \ DOCUMENTS AND SETTINGS\ AMMISADDAI ARCIGA \ ESCRITORIO \ TESIS\ SI\ PROGRAMAl.UDL AL FINAL DE REALIZAR EL PROGRAMA ES f\ECESARIO MODIFICAR EL PROGRAMA FINAL.. Figura 25. Panel Principal Guardar Programa..
(48) 52. El sub-menú que despliega el programa cuenta con las siguientes variables [ 14], ver figura 26:. 1- Home (NT): Establece la posición de referencia en el sistema de coordenadas cartesianas. 2- 08 (08): Establece el estado de la salida de un bit especificado a través de un puerto de salida externa. 3- Speed (SP, L, H): Establece la velocidad de operación y tiempo de aceleración/deceleración para el robot. 4- Gripper (GO, GC): Abre o Cierra el Gripper. 5- Move (MO, O, C): Mueve el final de la mano a una posición especificada. 6- Time (TI): Detiene el movimiento por un período determinado de tiempo. 7- End (ED): Finalización del programa. 8- Salir: Te regresa a la pantalla principal de manipulación.. SIMULACION. COLOQUE El I\LMERO CORESPONDIENTE A LA ACCIÓN A TOMAR: l ·HOME, 2-08, 3-SPEED, 4-GRIPPER, S·MOVE, 6· TtME, 7-END Y6SAL!R.. NOTA: PARA PODER GE IMPLEMENTARA EN MIT "GENERAR" SE DESPLE SELECCIONAR LA ACCIÓ. ACCIÓN:. PARA ESTE CASO LA DIR GUARDARAN TODOS LO \ DOCUMENTS AND SETT~5"'imTS,i,"i:,rnirr'm~:i11:i- - - T -"C:=.--;;;_...;;__:,;,_____::_J ESCRITORIO \ TESIS\ SI\ PROGRAMA 1.UOL AL FINAL DE REALIZAR EL PROGRAMA ES NECESARIO MODIFICAR EL PROGRAMA FINAL.. Figura 26. Panel Principal Guardar Programa (Menú). Una vez especificados las secuencias de movimiento que realizara el manipulador, estas son guardadas en la base de datos de Microsoft Access, ver figura 27, en donde una vez adquiridos los datos se prosigue a la exportación a .txt, archivo que será descargado en el gabinete de control original del Brazo Mitsubishi, ver figura 28..
(49) 53 Herramientas de t abla. PROGR;:.MA: Base de datos (Fom,alo dl' archr10 de Acce.... X. Hoj a de <latos. • ~¡~¡ ¡ 1. I. Vt.r ;. l. .•. Ptgar. j. • lf. C). j..,. -. aíizar , ¡~= -= -jl'V L j ,1 ~cb.J todo .. "'. J. Nu,vo. ..!ji Guardar )(. U!. 1: tat,I., .,, R.,u,ón orto9ráfica. =. Ehminar .. ea Mas·. H. ~ Portapa t lt s rv. Todas las tab las. ,. h,/ :. tA ... ~ Stlt cción ... 'g Avanza das •. V. I.Jt.trnarf1lh'l. ~. .,. l, Buscar. • •. Ord~yJt~ar. ,.. ! «. DATOS. ~. DATOS : Tabla. -O. 'os. -1. 0B 0B 0B 0B. ·2 -3. IIJ. 0B. .7. 11 I!. SP. 7. ,H. ' GO. I!. ll P. /j. -4. -5. /j. TI. ¡;. MO. 10 1. ,o. ~. SP. 3. ,L. " ". MO MO. 2. ·º,o. 11. 3. ·r10. TI. Reg irtro ; 1~. < l de39. • •1. j. l1 1. •·. Vl sttlll!I! d• datos. Figura 27. Base de Datos de Programa MRL. NOTA: Cabe mencionar que en la base de datos no aparecen los números en la columna de NÚMERO, por tal motivo se realiza el cambio de la numeración de forma manual.. 11J¡gj. Administrar tareas de datos lfll)Orta<i0nc< guardada,. te Ari:.e ••. -. -. ·,. ll_~ciines guar~ ·- '----~ -~'------ -- - - - - - - - - - - - - - ,. Haga de para selecoonor la Olq)O(t&ióog....-darla que desea adornstrar.. ;. r-. "-. •. -.·4. X. Todas las tablas DATOS DATOS : Tabla. Para editar el norrbre o la dosalpd<in de la operación guardada, seleccione la operación y, cie<pués, haga die en el texto q,e desee editar. Ejeq¡tar. J I úear tarea de ~. .. . 1 1. i;:1 -.-. c,m,r. Vi sta Hoj a de datos. Figura 28. Exportación de Datos de Programa a extensión .txt.
(50) 54. Donde se representa la exportación de los archivos a la extensión .txt mostrado en la figura 29. - --- t . PROGRAMA - Bloc de nold5 GJ['.g]~ Archivo Edición Formato Ver Ayuda. 10 NT 20 0B -O 30 0B -1 40 0B -2 50 0B -3 60 0B -4 70 0B -5 80 0B -6 90 0B -7 100 SP 7 ,H 110 GO. 120 TI 10 130 MO 1 ,O 140 SP 3 , L 1 50 MO 2 , O 160 MO 3 ,O 170 TI 10 180 GC 190 TI 10 200 MO 2 ,C 210 MO 1 ,C 220 SP 7 , H 230 MO 4 ,C 240 MO 5 ,C 250 SP 3 , L 260 MO 6 ,C 270 MO 7 ,C 280 TI 10 290 GO 300 TI 10 310 MO 6 ,O 320 MO 5 , O 330 SP 5 , L 340 MO 4 ,O 350 MO 1 ,O 360 NT # ED. ~I. Figura 29. Archivo Programa .txt. 5.2 TARJETA DE ADQUISICIÓN DE DATOS. La adquisición de datos, consiste en la toma de muestras del mundo real (sistema analógico) para generar datos que puedan ser manipulados por una PC. Consiste en tomar un conjunto de señales físicas, convertirlas en tensiones eléctricas y digitalizarlas de manera que se puedan procesar en una PC. Se requiere una etapa de acondicionamiento, que adecua la señal a niveles compatibles con el elemento que hace la transformación a señal digital. El elemento que hace dicha transformación es el módulo de digitalización o tarjeta de Adquisición de Datos (DAQ), ver figura 30..
(51) SS. ·~ -. .,~. ,.......,,,... ioa,,_ ,::.::=.'.1. - -----. --Figura 30. DAQ6008 [ 17]. El software de aplicación facilita la interacción entre la PC y el usuario para adquirir, analizar y presentar datos de medidas. Puede ser una aplicación pre-construida con funcionalidad predefinida o un entorno de programación para construir aplicaciones con funcionalidad personalizada. Las aplicaciones personalizadas generalmente son usadas para automatizar múltiples funciones de un dispositivo DAQ, realizar algoritmos de procesamiento de señales y mostrar interfaces de usuario personal izadas. [ 17]. En la figura 31 se muestra las etapas de adquisición y acondicionamiento de datos para ser manipulados desde la PC.. Sensor. PC. Dispositivo DAO. Bus. Acondicionamiento d SfJñales. Convertidor An.ilcig,co-D,g,t;:il. Software Controlador. Figura 31. Adquisición de Datos. [ 17]. Software de Aplicación.
(52) 56. Para el caso de estudio de este proyecto se implementó la Tarjeta de Adquisición de Datos de National Instruments DAQ6008, la cual nos brinda las siguientes características (ANEXO 8):. •. 8 entradas analógicas (12 bits, IOkS/s). Figura 47. •. 2 salidas analógicas (12 bits a 150 S/s), 12 E/S digitales; contador de 32 bits. Figura 32. •. Energizado por bus para una mayor movilidad, conectividad de señal integrada. •. Compatible con LabVIEW, LabWindows/CVI y Measurement Studio para Visual Studio .NET. •. Software controlador NI-DAQmx y software interactivo NI LabVIEW SignalExpress LE para registro de datos. NI USB-6008. Figura 32. Entradas y Salidas DAQ. 5.3 DISEÑO DE CIRCUITOS DE COMUNICACIÓN. El objetivo de diseñar circuitos relacionados con la comunicación, es tener la oportunidad de intercambiar información con el exterior, como se ha mencionado en temas anteriores, la adquisición de señales ofrecidas por los sensores deben ser transmitidas a la tarjeta de adquisición de datos, para ello, se desarrolló circuitos Proporcionales los cuales hacen una comparación con voltajes de referencias y voltajes que nos retroalimentan salidas de un sensor..
(53) 57. Ya adquiridas esas señales, el segundo objetivo es, mover los actuadores del brazo robótico a una posición deseada, en el caso del presente proyecto, los valores que se entregan al sistema para que sea ubicado el brazo, son ángulos de posición, en la figura 33 se muestran los actuadores que en principio son manipulados por el Software LabYIEW, la tarjeta DAQ 6008 y los circuitos P con funcionalidad de potencia. r~~. i 1. ..-.,1,. .r--J4. ,n-.,tu,. JI ul& limill 1>W1~. Figura 33. Actuadores Brazo Mitsubishi [ 14]. Para poder obtener esa señal requerida para la ubicación de los actuadores, se colocaron sensores (potenciómetros de precisión) en paralelo a los actuadores, los cuales brindan la posición angular en términos de voltaje. Véase figura 34. Figura 34. Posición de Sensores.
(54) 58. 5.3.1 Circuito P (Proporcional). Un controlador proporcional calcula la diferencia entre la señal de variable de proceso y la señal de set point, llamado error. Este valor representa cuanto el proceso se está desviando del valor del set point, y puede ser calculado como SP-PV (set point-variable de proceso) o como PV-SP (variable de proceso-set point), en particular se busca que este error sea lomas aproximado a cero, dependiendo si el controlador tiene que producir un incremento en su señal de salida para causar un incremento en la variable de proceso, o tener un decremento en su señ.al de salida para hacer de igual manera un incremento de PV (variable de proceso).. Esta manera de sustracción determina si un controlador será reverse-acting (acción inversa) o direct-acting (acción directa). La dirección de acción requerida por el controlador es determinada por la naturaleza del proceso, transmisor, y elemento final de control. [18]. Para el presente proyecto se plantea el siguiente diagrama a bloques del sistema de posición en lazo cerrado:. Potenciómetro. e. r Sumador. p. u. Controlador. Motor. y. Proceso. Figura 35. Diagrama a bloques del sistema de posición en lazo cerrado. 5.3.1.1. Amplificador operacional. Se utilizó un amplificador operacional LM741 por su bajo costo y facilidad de adquisición en el mercado local. La figura 36 muestra el diagrama de conexionado de este integrado..
(55) 59. 2. 7 LM741. 3. 6. 4. 5. Figura 36. Amplificador Operacional LM 741. Las terminales de los circuitos integrados se enumeran desde la muesca, vistos desde la parte superior, en sentido anti horario. El integrado LM74 I, amplificador operacional, se alimenta, para su funcionamiento, a los terminales 4 y 7 con voltajes que no superen los -18 y+ 18 volts de CD respectivamente. Los terminales 1, 5 y 8 no se utilizan en este proyecto.. 5.3.1.2. Sumador. El sumador o comparador, se puede construir con el amplificador operacional LM74 I conectado como muestra la figura 37, en la cual se aprecia que el voltaje de salida (terminal 6) es igual a la diferencia de los voltajes de entradas (aplicados a los terminales 3 y 2), que en este caso serán la referencia, r, y la salida del potenciómetro y.. Realizando pruebas, se muestra que el voltaje de salida en la terminal 6 es igual a la diferencia de voltajes en las entradas (terminal 2 y 3).. R4. Figura 37. Amplificador LM741 conectado como sumador.
(56) 60. 5.3.1.3. Amplificador Inversor. El circuito muestra el LM74 I conectado como amplificador inversor, ver figura 38:. V+. R2 <TEXT>. Figura 38. El LM741 como amplificador inversor. Se aprecia que el voltaje de salida, Yo, es igual al voltaje de entrada, Vi, amplificado R2/R 1, pero con polaridad inversa. Para corregir la polaridad se emplea otro amplificador inversor, en cascada, con ganancia igual a 1, es decir, con R2 = R1, ver figura 39.. Figura 39. Controlador proporcional análogo con amplificadores LM741. 5.3.1.4. Amplificador de potencia. El controlador proporcional análogo, basado en amplificadores proporcionales, genera un voltaje proporcional al error, e, en la relación:.
Figure
![Figura 3. Configuraciones Básicas [ 12]](https://thumb-us.123doks.com/thumbv2/123dok_es/2211517.511000/21.948.342.713.429.878/figura-configuraciones-básicas.webp)

![Figura 8. RV-M I Movemasterex [14]](https://thumb-us.123doks.com/thumbv2/123dok_es/2211517.511000/29.948.304.711.141.430/figura-rv-m-i-movemasterex.webp)
+7
![Figura 1 O. Dimensiones RV-M I MOVEMASTEREX [ 14]](https://thumb-us.123doks.com/thumbv2/123dok_es/2211517.511000/31.948.251.751.875.1123/figura-o-dimensiones-rv-m-i-movemasterex.webp)


Documento similar
El fin de este proyecto es el montaje, programación y puesta en marcha de un sistema de visión artificial coordinado con un brazo robótico, para la realización de manipulación
• Estudiar las distribuciones de popularidad más comunes en conjuntos de datos de reco- mendación para observar el comportamiento de las métricas, tanto de verdaderos como de
En este punto del ciclo de vida, se observa quizás la mayor distancia entre los recomendadores de referencia y los casos con los distintos ciclos de vida planteados, lo cual por
Estos capítulos contienen diseño de las distintas piezas, selección, funcionamiento y programación de los distintos módulos, sensores, componentes y motores, desarrollo del
a) La condición interna del receptor, el cual requiere un retardo de la próxima Trama de Datos o Trama Remota. b) Detección de un bit dominante en el primer y segundo bit
Además, en este capítulo, se detalla el trabajo realizado tanto en Windows XP, con el uso de la herramienta facilitada por Schunk para controlar los motores, como en Linux, con la
− Un manipulador de menú, si el ítem tiene el flag MF_POPUP, en éste caso hay que hacer un casting a (UINT). − O puede ser cero, si se trata de un separador. El último
Como este proyecto, a la vez que divulgar los avances, investigaciones y desarrollos que se han llevado a cabo, también pretende ser una especie de manual para futuros trabajos que
