Material complementario para la solución de circuitos eléctricos no lineales resistivos puros por métodos gráficos
105
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de electroenergética. TRABAJO DE DIPLOMA Material complementario para la solución de Circuitos eléctricos no lineales resistivos puros por métodos gráficos Autor: Jorge Luis Sánchez Pérez [email protected]. Tutor(es): Dr. Avertano Hernández Stuart [email protected]. MsC. Juan Curbelo Cancio [email protected] Santa Clara 2011 "Año 53 de la revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “Hay una fuerza motriz más poderosa que el vapor, la electricidad y la energía atómica: la voluntad” Albert Einstein.
(5) ii. DEDICATORIA. A mis padres, Rosa Elena Pérez Salgado y Jorge Luis Sánchez Pérez. Por todo el amor y dedicación que me han dado en el transcurso de mi vida. A mis cuatro abuelos en especial a María de Jesús, por darme todos ellos su cariño y ayudarme cada vez que lo he necesitado. A todos mis familiares, especialmente a mis tíos y primos. A mi novia que me incondicionalmente.. ha. dado. su. amor. y. apoyo. A mis compañeros de aula, mis amigos y todos aquellos que de una manera u otra han contribuido a la realización de este trabajo. A mis profesores que han ayudado con su trabajo y dedicación a mejorar mi formación humana y profesional..
(6) iii. AGRADECIMIENTOS. La realización de este trabajo, es el resultado de varios años de duro estudio e intensa dedicación. No habría sido posible sin la ayuda y los consejos de diferentes personas, a las cuales me gustaría agradecer. Quiero agradecer también a todos mis profesores, de los cuales he recibido siempre cariño y apoyo moral, con cuya ayuda he logrado que mi esfuerzo haya sido exitoso, lo que me ha permitido terminar mi carrera profesional, que para mí ha sido una de las mayores alegrías en mi vida. Con el más sincero cariño a… Dr. Avertano Hernández Stuart MSc. Juan Curbelo Cancio El profesor de la asignatura Sistemas Eléctricos: Dr. Leonardo Casas Fernández El estimado profesor de Suministros Eléctricos: Dr. Ignacio Pérez Abril El estimado profesor de la asignatura de Ingeniera Eléctrica: Dr. Ángel Valcárcel Rojas La profesora de la asignatura protecciones Eléctricas: Dra. Marta Bravo de las Casas Los tres profesores del departamento de Máquinas Eléctricas: MSc. Arian Ramos Martínez MSc. Alicia Hernández Maldonado Ing. Deivis Jesús Arias Álvarez.
(7) iv. TAREA TÉCNICA. . Revisión y estudio de la bibliografía y preparación metodológica existente acerca del análisis de circuitos resistivos no lineales por métodos gráficos.. . Actualización los contenidos teóricos usando textos básicos y materiales de estudio publicados en Internet.. . Elaboración un documento de apoyo a la docencia, acerca del análisis de circuitos resistivos no lineales por métodos gráficos, uno de los temas que forman parte de la asignatura Circuitos Eléctricos III para la carrera de Ingeniería Eléctrica.. . Estudio de los contenidos fundamentales del lenguaje de programación Matlab y el empleo de su simulador Simulink, que permitan resolver los problemas relacionados a la solución gráfica de los circuitos resistivos no lineales.. . Resolución de ejercicios típicos adecuadamente seleccionados, de forma analítica, que ilustren de manera coherente el tratamiento de este tema en la asignatura Circuitos Eléctricos III, llevar a cabo la solución de los mismos, total o parcialmente, mediante programas elaborados en Matlab y finalmente obtener la solución elaborando modelos utilizando el simulador Simulink.. . Elaboración de un listado de ejercicios sobre el tema, que permita al estudiante ejercitar y consolidar lo aprendido.. . Organización adecuadamente la estructura de la tesis basándose en un diseño metodológico estratégico según la didáctica de la asignatura y las orientaciones y normas aprobadas por el MES.. . Escritura del informe del trabajo de diploma con todos los requisitos que se exigen.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. La solución de circuitos no lineales se hace muy compleja dado que no se pueden aplicar los métodos generales conocidos. Debido a las dificultades que se presentan en la aplicación de estos métodos se ha decidido la realización de este trabajo con el fin de esclarecer y ejercitar los conocimientos sobre esta materia, obteniéndose además un documento final que servirá de base material de estudio para profesores y estudiantes. Se actualizan los conocimientos sobre circuitos no lineales mediante una amplia bibliografía buscada en libros y en internet. Se muestran distintas vías para resolver ejemplos utilizando métodos gráficos. Se trabaja con el MATLAB realizándose distintos programas para facilitar la obtención de las respuestas y se simulan varios circuitos mediante el SIMULINK para que el lector vea desde un punto de vista más práctico los circuitos y se familiarice con ellos. Pueden compararse los resultados obtenidos por varias vías y comprobarse la similitud de los resultados..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES,. MÉTODOS DE SOLUCIÓN.................................................................................................. 3 CAPÍTULO 2.. SOLUCIÓN DE CIRCUITOS NO LINEALES USANDO LA. SOLUCIÓN, POLINÓMICA, EL MÉTODO ESTRUCTURAL, LINEALIZACIÓN POR PARTES Y EL MATLAB. ................................................................................................... 43 CONCLUSIONES Y RECOMENDACIONES ................................................................... 85 ANEXO ................................................................................................................................ 88 Anexo II ............................................................................................................................ 90.
(10) INTRODUCCIÓN. 1. INTRODUCCIÓN. Generalmente en la Ley de Ohm V. I * R se supone que el parámetro R , llamado. resistencia, sea constante, se habla entonces de circuito eléctrico resistivo lineal. En la realidad existe una gran variedad de elementos o de dispositivos eléctricos que no son en ninguna manera lineales, es decir que la relación entre voltaje aplicado y corriente no es constante. Estos elementos o dispositivos se llaman no-lineales. Ejemplos de elementos nolineales son el bombillo común y el termistor (llamado a veces resistencia térmica), el tubo electrónico, los transistores, los rectificadores etc. Cuando en un circuito eléctrico se emplea uno o más elementos no-lineales, el circuito se llama no-lineal. La red no-lineal no obedece a la ley de Ohm en su formulación usual que es la estática, pero sí a su formulación dinámica. En general la relación I. f (v) está dada por expresiones. matemáticas complicadas, según los diversos tipos de elementos no-lineales; por esta razón se prefiere tener dicha relación bajo forma de diagramas y buscar la solución de los circuitos que contienen elementos no-lineales por procedimientos gráficos, que además de dar una buena respuesta cuantitativa a los problemas, se prestan a una interpretación cualitativa de los fenómenos. El objetivo general de este trabajo es desarrollar un material sobre circuitos eléctricos no lineales resistivos puros utilizando métodos gráficos. Los objetivos específicos son: 1. Determinar los referentes teóricos y metodológicos sobre los circuitos eléctricos no lineales resistivos puros. 2. Estudiar los contenidos sobre el lenguaje de programación del MATLAB y el empleo de su simulador Simulink..
(11) INTRODUCCIÓN. 2. 3. Resolver ejercicios tipos de forma analítica y mediante programas del MATLAB e implementar estos circuitos en el Simulink. 4. Presentar los resultados de los ejercicios propuestos explicando los pasos a dar tanto del proceso analítico como de la simulación. La memoria escrita está estructurada en dos partes: Una primera parte donde se realiza toda una recopilación bibliográfica que dio a conocer el estado del arte en que se encontraba la materia y se elabora todo un resumen teórico de los diferentes métodos de solución de estos circuitos no lineales resistivos puros utilizando métodos gráficos. Este capítulo debe recoger el resultado de los aspectos relacionados con los temas que serán tratados. Entonces, deberá contener la explicación de la necesidad del trabajo, el problema a resolver, una fundamentación de los objetivos que se proponen, un análisis de la actualidad y/o novedad del tema y cualquier otro aspecto que se considere necesario para una mejor comprensión. Una segunda parte donde se resuelven determinados ejercicios típicos analíticamente, MATLAB y en SIMULINK para demostrar las diferentes vías de solución y comparando los resultados se verifica que estas sean correctamente aplicadas..
(12) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES, MÉTODOS DE SOLUCIÓN. 1.1. INTRODUCCIÓN En el desarrollo de la Teoría de Redes corresponde una parte muy importante al estudio de las propiedades y métodos de solución de los circuitos lineales, pero en la realidad muchos dispositivos prácticos no cumplen la condición de linealidad o la cumplen aproximadamente dentro de cierto límite. Se tratará sobre aquellos elementos de circuitos en los que la relación entre las variables no sigue una ley lineal, por lo que se denominan elementos no lineales. En la Figura 1.1 se muestra el símbolo para el resistor, inductor y capacitor, así como las características que pueden tener en cada caso y las variables que la relacionan. Para el estudio de las redes lineales existen un conjunto de métodos matemáticos de solución: solución de ecuaciones algebraicas lineales, de ecuaciones diferenciales lineales, transformadas de Laplace, Fourier y método fasorial. Todos se basan en el Principio de Superposición, propiedad esencial que caracteriza a las redes lineales..
(13) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 4. SOLUCIÓN. Figura 1.1 En cualquier problema existe siempre un procedimiento sistemático para obtener las soluciones exactas, con mayor o menor grado de complejidad numérica, en dependencia de la complejidad del circuito. En el caso de los circuitos no lineales esto no es así. El Principio de Superposición no es aplicable; las ecuaciones que hay que resolver no tienen solución analítica o esta es muy difícil de hallar aunque se trate de una red simple. En otros casos, no se tiene una descripción analítica del elemento, sino solo tablas de valores. Es decir, que no existe una teoría matemática general, por lo que el procedimiento de solución depende del problema en particular, siendo los más frecuente los métodos aproximados o numéricos en los que se acepta determinado error(Lu, 2009). Los dispositivos no lineales realizan en la práctica múltiples funciones, sin las cuales no es concebible la técnica moderna y que son imposibles de lograr con los lineales. Están por ejemplo los rectificadores, multiplicadores de frecuencia, osciladores, moduladores, etc. De ahí que no obstante las dificultades con que se enfrenta su análisis, este se encuentre en constante desarrollo. El conocimiento actual sobre circuitos no lineales justifica escribir no un capítulo, sino un libro sobre el tema: de ahí que se realizó una selección para presentar aquellos contenidos más generales y básicos del tema. Como no existe una teoría general, se estudian diferentes casos particulares; estos son: circuitos resistivos puros; con un elemento almacenador (solo inductores o solo capacitores) y circuitos dinámicos (Trajkovic, 2005)..
(14) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 5. SOLUCIÓN. El primer caso se describe mediante ecuaciones algebraicas no lineales, dado que, al estar en fase estímulo y respuesta no es necesario en el análisis incluir al tiempo. Se emplean métodos numéricos como Newton-Raphson, métodos gráficos o aproximados. En circuitos con un solo elemento almacenador la relación estímulo-respuesta es a través de derivadas e integrales. Se analizan en estado estacionario utilizando las variables determinadas por la característica. (i) , q (u) e integrando o derivando el estímulo.. Los circuitos dinámicos se describen mediante ecuaciones diferenciales no lineales, que no tienen solución exacta ni general. Se utilizan métodos numéricos y en régimen estacionario existen otros que tienen cierta analogía con los métodos de frecuencias en circuitos lineales(Alba, 1987, Weiland, 2010). 1.2. DEFINICIONES BÁSICAS SOBRE ELEMENTOS NO LINEALES En este epígrafe se establecerán los conceptos iniciales necesarios para el estudio de los circuitos no lineales: forma en que se expresan las características, principales dispositivos no lineales de interés práctico, etcétera. Se tratarán los elementos no lineales resistivos. 1.2.1. Elementos resistivos Para describir las características de los elementos no lineales resistivos se utilizan las funciones i. i (u ) y u. u (i) , siendo la primera la más usada. Para ambas es requisito. indispensable que estén definidas y que sean conocidas en todo el intervalo de variación de la corriente y el voltaje en que será utilizado el resistor no lineal en cuestión. En dependencia de la forma de la característica, los elementos pueden ser divididos en bilaterales y unilaterales. En el primer caso su comportamiento es independiente del sentido de la corriente y del voltaje (Ver figura 1.2). En el segundo, la característica volt-ampere varía al cambiar el sentido de la corriente y el voltaje (ver figura 1.3) (Alba, 1987)..
(15) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 6. SOLUCIÓN. No necesariamente las características de los elementos no lineales se desarrollan siempre en el primer y tercer cuadrante, como las mostradas en las figuras 1.2 y 1.3. Se encuentran elementos cuyas características pueden tener zonas en los cuadrantes segundo o cuarto. En el primer caso, la potencia instantánea siempre será positiva, es decir consumida por el elemento. En el segundo caso, hay zonas para las que la potencia instantánea es negativa el elemento entrega potencia al circuito (ver figura 1.4)..
(16) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 7. SOLUCIÓN. En el primer caso, la potencia instantánea p(t ) u(t ) * i(t ) siempre será positiva, es decir, consumida por el elemento. En el segundo caso, hay zonas para las que la potencia instantánea es negativa, es decir, el elemento entrega potencia al resto del circuito. Igualmente, según su forma, las características pueden ser monótonas y no monótonas. Monótonas son aquellas que en todo el intervalo de variación, la derivada no cambia su signo; siempre: di 0 Ó du. di 0 du. Un ejemplo se muestra en la figura 1.2. Por el contrario, son no monótonas aquellas características en las que puede cambiar el signo de la derivada. En este grupo se distinguen por su interés las características tipo N y tipo S. Puede observarse en la figura 1.5 a, como en la característica tipo N existen zonas de pendiente positiva y otras de pendiente negativa. A cada valor de voltaje corresponde un.
(17) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 8. SOLUCIÓN. valor determinado de corriente, pero lo inverso no se cumple: a determinados valores de corriente pueden corresponder tres valores diferentes de voltaje. Es decir, en las características tipo N el voltaje no es una función univaluada de la corriente. Estas características se dicen controladas por el voltaje (Rugh, 1981, Stern, 1965).. a). b) Figura 1.5. En la característica tipo S que se observa en la figura 1.5 b), la corriente no es una función univaluada del voltaje, definiéndose esta controlada por corriente. Las curvas características de los elementos no lineales se obtienen experimentalmente. Cuando se utilizan corrientes o voltajes constantes (CD) cuya magnitud se va variando de modo tal que pueda obtenerse toda la curva, las características así obtenidas se denominan estáticas(Cermak, 1971). Estas definen el comportamiento del elemento a CD y frecuencias bajas, ya que a partir de cierto valor aparecen otros efectos que hacen que la característica estática deba ser corregida. El valor límite de frecuencia depende del dispositivo en específico. Debido a la complejidad que introduce la corrección de las características para valores altos de frecuencia, este efecto no se tendrá en cuenta y se supondrá a lo largo de todo el capítulo que se trabaja dentro de los límites de validez de las características y que el elemento no lineal no es afectado por la frecuencia del estímulo aplicado (.Wilson, 1975, Chua, 1969). 1.2.2. Parámetros estáticos y dinámicos..
(18) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 9. SOLUCIÓN. En ocasiones, resultan útiles en el análisis de circuitos no lineales las resistencias o conductancias estáticas y dinámicas. Sea, por ejemplo, la característica de un elemento no lineal resistivo como la mostrada en la Figura 1.6.. F i g u r a. 1 Figura 1.6. Si el elemento se encuentra operando en el punto 0, se define la conductancia estática en este punto como:. G. I U. 0. E0. (1.2.1). 0. Análogamente, puede definirse la resistencia estática:. R. E0. U I. 0. (1.2.2). 0. El carácter no lineal del elemento hace que sus parámetros estáticos sean diferentes para cada punto de operación, es decir, si el dispositivo se encuentra operando en el punto a:. G. I U. a. Ea. a. G. E0. (1.2.3).
(19) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 10. SOLUCIÓN. Es evidente de la definición que los parámetros estáticos son siempre positivos. Su utilidad mayor se encuentra en el análisis de aquellos circuitos en que las corrientes y voltajes no varían con el tiempo (Dent, 1998). En la misma característica de la figura 1.6 puede definirse la conductancia dinámica en el punto de operación o como el límite de la relación entre los incrementos de corriente y voltaje. i y u , o lo que es lo mismo, la derivada en el punto 0.. G D0. di du. (1.2.4) u. U0. Análogamente puede definirse la resistencia dinámica en el punto de operación 0, que se denomina R D0 . Los parámetros dinámicos también dependen del punto de operación y tiene su mayor utilización en aquellos casos en que el estímulo es la suma de una componente CD y una componente alterna de pequeña magnitud. En estos casos es posible representar la característica en las cercanías del punto de trabajo ´´0´´ por una línea recta según la expresión:. i i(U 0). i u. (u u. U. 0. ). I G 0. D0. (u. u ) (1.2.5) 0. U0. Donde se ha tomado derivada parcial ya que la corriente depende tanto del voltaje como del tiempo. Esta aproximación se cumple si el intervalo de variación de la componente alterna es pequeño y es la base del análisis del comportamiento a pequeña señal de los amplificadores y otros dispositivos en los cuales se utilizan elementos activos no lineales. En dependencia de la forma que tengan las características de los elementos no lineales, los parámetros dinámicos pueden ser positivos o negativos. En la definición hecha a partir de la figura 1.6 se tiene evidentemente que la conductancia dinámica es positiva. En. las.
(20) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 11. SOLUCIÓN. características tipo N y tipo S se encuentra que hay zonas en que la derivada es negativa, es decir, que a incrementos de voltaje corresponde disminución de corriente (características N) o que a incrementos de corriente corresponde disminución de voltaje (características S). En estos casos los parámetros dinámicos son negativos (Clay, 1971). 1.3. DESCRIPCIÓN ANALÍTICA DE LAS CARACTERÍSTICAS NO LINEALES Cuando se desea utilizar métodos analíticos de solución o cuando se requiere trabajar con computadoras digitales, es imprescindible disponer de una expresión analítica para las características de los elementos del circuito (Goldgeisser, 1998). En el caso de los elementos no lineales, generalmente no se dispone de esta expresión analítica. Lo más usual es que las características se presenten en forma de curvas o tablas de valores (Alba, 1987).. Figura 1.7 Para generalización del análisis se han denominado x , y las variables independiente y dependiente, respectivamente. En cada caso particular se tendrá que: Para un resistor no lineal:. x. u ; y. Para un inductor no lineal:. x i; y. Para un capacito no lineal:. x. u; y. i. q.
(21) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 12. SOLUCIÓN. Se describirán a continuación los procedimientos más conocidos para obtener una f (x) a partir de un conjunto de pares de valores ( x, y ) . Estos son:. expresión analítica y. la aproximación mediante polinomios y la linealización por partes(Weiner, 1980). En cualquier método, la descripción analítica implica una aproximación, y por tanto un determinado error. Se comprobará en la explicación posterior cómo, mientras más cercana sea la expresión analítica a la curva real y por tanto menor sea el error, la aproximación resultará más compleja(Nilsson, 2007). Por otra parte, es necesario definir con precisión los límites de la aproximación, ya que mientras mayor sea el intervalo, o mientras más pares de valores x , y se consideren, más compleja resultará la aproximación(Ushida, 1976). De ahí que para una aplicación eficiente de cualquiera de los métodos existente sea importante determinar previamente los límites de trabajo del equipo o dispositivos y la cantidad de puntos o pares de valores ( x, y ) necesarios que han de considerarse(Trajkovic, 1999). 1.3.1. Aproximación a las características mediante polinomios. Interpolación El problema de hallar una curva que pase por un conjunto de puntos está indeterminado, pues hay infinitas curvas que pasan por un determinado número de puntos, por pequeño que este sea. Para que el problema de la interpolación quede determinado debe prefijarse el tipo de función que se requiere utilizar, siendo las más simples los polinomios; por ejemplo:. a. y ( x). 0. a1 x. ax 2. 2. ... an x. n. n. ax. n. k. k 0. (1.3.1). La condición que se establece consiste en que deben determinarse los valores de los coeficientes. a fin de que la función tome los valores. x , x , x ...x 0. 1. 2. m. y , y , y ... y 0. 1. 2. m. para cada valor. . Es decir, la aproximación y la característica exacta deben coincidir en. esos puntos (Sontang, abril /1981)..
(22) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 13. SOLUCIÓN. Resulta fácil comprender que como el número de datos es m 1 (es decir, hay m 1 pares de valores x, y contando desde. x ,y 0. 0. x ,y. hasta. m. m. ) para que el problema tenga solución. única deben tenerse m 1 incógnitas (es decir, m 1 coeficientes determinar). Si el grado del polinomio y. f (x) es. n , habrá 2. k. que hay que. n 1 coeficientes, por lo. que la solución es única cuando: m. m 1 n 1. n. Para determinar los valores de los coeficientes. y a ax 0. 0. 1. 0. y a ax 1. 0. 1. 1. debe resolverse el siguiente sistema:. n. .... a x0. .... a x1. .... a xm. n. n. n. .. y a ax n. 0. 1. n. n. n. Que resulta ser un sistema de ecuaciones lineales donde recalca m. n.. Esta última condición puede convertirse en una desventaja, ya que hace depender la complejidad de la aproximación del número de puntos. Otra desventaja es que, aunque la aproximación completamente exacta en lo pares de valores. x , y que se tienen como datos, no se puede controlar el error en puntos. intermedios(Acha, 1979). Fórmula de Lagrange Si la cantidad de datos experimentales de que se dispone es elevada, el orden del sistema de ecuaciones que hay que resolver crece y consecuentemente el trabajo numérico necesario. De ahí que se hayan desarrollado fórmulas que permiten llegar a resultado final sin tener.
(23) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 14. SOLUCIÓN. que resolver el sistema de ecuaciones. Una de ellas es la fórmula de Lagrange, cuyo fundamento se explicara continuación. Se forma un polinomio de grado n tal que se anule en los puntos. x , x ...x 1. 2. n. y que. x tome 0. el valor de y . Esto es: 0. f. 0. k. ( x). f (x ) y 0. x )(x x )...(x x ). (x. 0. 0. 1. 2. n. (1.3.2). 0. Donde la constante. k. 0. tiene el valor necesario para que la condición (1.3.3) se cumpla:. f ( x ) k ( x x )(x x )...(x x ) y 0. k. 0. 0. 0. 1. 0. 2. 0. n. 0. y ( x x )( x x )...( x x ) 0. 0. 0. 1. 0. 2. 0. (1.3.4). n. Igualmente, se forma otro polinomio que se anule, en este caso los puntos x0 , x2 ,...xn y que para. f. 1. x. y . Esto es. tome el valor. 1. 1. k ( x x )(x x )...(x x ). ( x). 1. 0. 2. (1.3.5). n. f (x ) y 1. 1. (1.3.6). 1. La constante. k. 1. se calcula a partir de. (1.3.6):. y k ( x x )(x x )...(x x ) 0. (1.3.7). 1. 1. 0. 1. 2. 1. n. Analógicamente se van formando polinomios auxiliares hasta llegar al último, se anulará en los puntos. x , x , x ...x 0. 1. 2. n 1. y que para. x. n. f. n. (x) , que. tomará el valor y . Esto es: n.
(24) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 15. SOLUCIÓN. f. n. k. ( x). n. f (x ) y n. k. x )(x x )...(x x. (x. n. 0. 1. ). n 1. (1.3.8). n. y ( x x )( x x )...(x x n. n. n. 0. n. 2. n. El polinomio deseado y. n. (1.3.9). ) 1. y , y ,... y. f (x) , es aquel que toma los valores. 0. 1. para cada. n. valor x0 , x1 ,...xn . Este resulta ser simplemente la suma de los diferentes polinomios auxiliares. f. 0. ( x),. f. 1. ( x),... f ( x) , por lo que, utilizando las expresiones (1.3.2) a (1.3.9) n. se encuentra que. y ( x). y( 0. x )(x x )...(x x ) y ( x x )(x x )...(x x ) x x )(x x )...(x x ) ( x x )(x x )...(x x ) (x. 1. 2. n. 0. 2. n. 1. 0. 1. 0. 2. 0. n. 1. 0. 1. 2. 1. ... y. n. x )(x x )...(x x ) ( x x )( x x )...(x x ) (x. n. 0. n. 0. 1. n. 1. (1.3.10) La expresión (1.3.10) es la fórmula de interpolación de LaGrange que puede expresarse en una forma más compacta como:. y. y ( x) i u. x )...(x x ( x x )...(x x (x. n i. i. 0. 0. i. x. x) )( x x )( x x ). )( x. i 1. i 1. )...(x. i 1. i. i 1. n. i. n. (1.3.11) Debe tenerse en cuenta al aplicar (1.3.11) que, para cada valor del subíndice ´´ i´´ no aparece en el numerador el término del tipo ( x. ( xi. x) i. ni en el denominador el término. x). i. La aplicación de esta fórmula permite obtener el polinomio resultante sin necesidad de resolver un sistema de ecuaciones. No obstante, dicho polinomio no se obtiene en forma ordenada, lo cual es un inconveniente común a casi todas las formas de interpolación.. n 1. n. n 1.
(25) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 16. SOLUCIÓN. Otro problema que confronta esta fórmula es que si la aproximación lograda es insuficiente y se requiere tomar en cuenta nuevos valores para formar un polinomio de grado superior, debe repetirse todo el trabajo numérico(Alba, 1987). Formula de Newton (Variante de Horner) La siguiente fórmula de interpolación está basada en las denominadas ´´diferencias divididas´´. Se denomina diferencias divididas de la función y. x , x , x ...x , x , x , x 0. 1. 2. i. j. k. f (x) en la sucesión de puntos. a los cocientes sucesivos que se expresan según la notación. m. siguiente:. y ( xi , x j ). y( x j ). (1.3.12). x x j. y ( xi , x j , xk ). y ( xi ) i. y ( x j , xk ) y ( xi , x j ) k. y ( xi , x j , xk , xm). (1.3.13). x x. i. y ( x j , xk , xm) y ( xi , x j , xk ). (1.3.14). x x m. i. La fórmula de interpolación se basa en ir incrementando paulatinamente el número de puntos a aproximar o parejas de valores x. y de la forma siguiente:. a) Si la característica a aproximar tiene sólo un punto ( x0 , y ) (el polinomio resultante 0. es simplemente y( x). y( x0) .. b)Si la característica a aproximar tiene dos puntos. (x , y ; x , y ) 0. 0. 1. evidentemente una línea recta que puede expresarse como:. y ( x). y ( x0) ( x. x0). y ( x1). y ( x0). x x 1. 0. 1. (la aproximación es.
(26) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 17. SOLUCIÓN. Esta es la ecuación de una recta que pasa por dos puntos. Según la notación introducida en (1.3.13) para la diferencia dividida de segundo orden:. y( x). y( x0) ( x. x ) y( x , x ) 0. 0. (1.3.15). 1. c) Siguiendo esta línea de razonamiento, se tiene que cuando la característica a aproximar pasa por tres puntos puede demostrarse que:. y( x). y( x0) ( x. x ) y( x , x ) 0. 0. x )(x x ) y( x , x , x ). (x. 1. 0. 1. 0. 1. 2. (1.3.16) donde se ha añadido a (1.3.15) un término en el que aparece la diferencia dividida de tercer orden (1.3.13) d) Para cuatro puntos:. y( x). y( x0) ( x. x ) y( x , x ) 0. 0. 1. (x. x )(x x ) y( x , x , x )(x x )(x x )(x x ) y( x , x , x , x ) 0. 1. 0. 1. 2. 0. 1. 2. 0. 1. (1.3.17) y así, análogamente. Puede notarse que, efectivamente, el trabajo numérico realizado no se pierde si una vez hecho el cálculo para una cierta cantidad de puntos se requiere añadir otros más(Acha, 1979). En general, esta fórmula puede escribirse como:. y( x). y( x0) ( x. x ) y( x , x ) 0. 0. 1. (x. x ) y( x , x , x ) 1. 0. 1. 2. (x. x ) y( x , x , x , x ) 2. 0. 1. 2. 3. (1.3.18) 1.3.2. Aproximaciones a la característica mediante polinomios: mínimos cuadrados. Este método es muy conocido y aplicado en diversas ramas de la técnica. Tiene su fundamentación en la minimización de error cuadrático. Si se denomina, en general, y(x) a la función aproximadamente, el error en un punto ´´i´´ de la característica se define como (ver figura 1.8): i. y( xi ). y. i. .... 2. 3.
(27) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 18. SOLUCIÓN. Es decir, la diferencia entre el valor de la función aproximadamente para el punto valor. y. i. x. i. y el. de la característica obtenido aproximadamente.. Figura 1.8 Este método puede aplicarse para distintas formas de la función y(x) .Escogiendo una aproximación mediante polinomios, para uno de grado n se tiene: n. y ( x). ax. k. k. k 0. Por lo que el error en el punto i se expresa ahora como: n i. k. a xi y k. k 0. i. Existen muchos criterios para minimizar el error, siendo este un tema que ha sido objeto de estudio para resolver diferentes problemas, como por en la aproximación a la característica de un filtro ideal(Sontang, abril /1981). En el método de mínimos cuadrados se minimiza el error cuadrático para toda la característica; este es: 2. m. 2. n. a k xi. i 0 k 0. k. yi. (1.3.19).
(28) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 19. SOLUCIÓN. La expresión (1.3.19) es la suma del cuadrado de los errores para los diferentes puntos de la característica, asociados al subíndice i , cuyo valor máximo se ha denominado m . El subíndice k está asociado a los diferentes términos del polinomio aproximadamente y su valor máximo corresponde al grado de dicho polinomio n . En este método no es necesario que el grado del polinomio y el número de puntos de la característica coincidan, lo cual es una de sus principales ventajas. Para minimizar el error cuadrático de toda la característica deben ajustarse los coeficientes. a. k. adecuadamente, a fin de que se cumpla, simultáneamente. 2. a. 2. 0. 2. 0 . a. 0. a. 1. (1.3.20). 0 n. Dado que hay n 1 coeficientes, de las condiciones (1.3.20) se obtiene n 1 ecuaciones, cuyas solución es (el conjunto de valores de. a. k. ) es la respuesta al problema planteado.. Se obtendrá a continuación la forma de esas ecuaciones. De acuerdo con las reglas de derivación y teniendo en cuenta que se trata de una operación línea, intercambiable con la sumatoria: 2. a. m. k. a xi y. m. 2. a. k. i 0 k 0. 0 2. n. 2. m. 2. n. a xi y x. . . .. k. a xi. i 0 k 0. 2. i. k. i 0 k 0. 1. a. n. 2. k. i. k. i. y xi i. 2.
(29) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 20. SOLUCIÓN 2. a. 2. m. n. k. a xi y xi. i 0 k 0. n. k. n. i. Trabajando, para mayor generalidad con la ecuación 1 y recordando que estará igualada a cero puede escribirse:. 2. m. n. k. a xi y xi k. i 0 k 0. m n. a xi. 0. i. m. k 1. k. i 0k 0. l. i 0. y xi. l. i. Que, agrupados convenientemente queda: n. m. k 0. a. k i 0. xi. m. k 1. i 0. y xi. l. i. Donde: k = número de cada coeficiente del polinomio de ajuste. i = número de cada punto de la característica no lineal l = número de orden de la ecuación que se forma a partir de las derivadas (1.3.21),. comenzando por cero. Se define entonces m. xi. lk i 0 m l. i 0. k l. y i xi. (1.3.21) l. (1.3.22). Por lo que la forma general de la ecuación 1 es: n lk k 0. o sea. a. k. l. (1.3.23).
(30) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 21. SOLUCIÓN. l 0 a0. l1 a1. l n an. .... l. Se forma entonces un sistema de n ecuaciones donde las incógnitas son los coeficientes ak . Como el número de puntos de la característica y el grado del polinomio son independientes, el primer paso resulta ser la selección de este último. En esto debe analizarse la forma de la característica no lineal, por ejemplo, si es una función impar debe escogerse un polinomio impar. No necesariamente un grado elevado del polinomio conduce a una aproximación mejor. Por esto no hay reglas específicas, siendo inevitable un proceso de tanteo hasta llegar a la mejor decisión, en lo cual puede ayudar mucho la experiencia previa del investigador(Acha, 1979, Alba, 1987). 1.3.3 Linealización por partes Una forma muy simple de expresar analíticamente la característica de un elemento no lineal consiste en dividir está en segmentos que se representan como líneas rectas. Cuando se realiza este procedimiento, en esencia lo que se logra es convertir un problema no lineal en lineal, siendo entonces la característica linealizada para un tramo cualquiera (ver figura 1.9) expresable de la forma siguiente.. y k. y. i. i. x. x. k. Donde. k. i. y x. k 1 k 1. y x. k. k. x. x. k 1. (1.3.24).
(31) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 22. SOLUCIÓN. Figura 1.9 Es decir, que para. cualquier valor de. inventario xk. la variable dependiente se obtiene según (1.3.24), que es la. x. x. k 1. ecuación de una recta de pendiente De esta forma, para el intervalo. k. x. k. la variable independiente x. e intercepto. i. x. x. k 1. y. i. en el. con el eje y .. la relación entre las variables y, x es lineal,. siendo aplicable los métodos conocidos para el análisis de dispositivos lineales. El conjunto de todas las ecuaciones para todos los tramos en que se divide la característica es la descripción analítica en este caso. Nótese la diferencia con las representaciones anteriores, en que se ha ido a la búsqueda de una función que se aproxima a la característica no lineal en todo el intervalo de trabajo; en la linealización por partes no existe una función para toda la característica sino varias funciones, una para cada tramo. La cantidad de tramos lineales a escoger depende de la forma que tenga cada característica en específico. Cuando se aplica este método, hay que tener especial cuidado en los puntos de cambio de pendiente, ya que cambian las ecuaciones que describen el comportamiento de los circuitos(Chungkin, 1987, Duffin, 1946)..
(32) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 23. SOLUCIÓN. 1.4. PROPIEDADES DE LOS CIRCUITOS NO LINEALES El análisis de los circuitos eléctricos y en general, de los sistemas lineales se encuentra muy desarrollado teóricamente, existiendo varios métodos desde el punto de vista matemático y una buena caracterización de sus propiedades generales .En este capítulo, se hará un estudio de las propiedades más generales de los circuitos no lineales que, como se verá, guardan gran diferencia con respecto a las propiedades y características de los circuitos lineales (Hasler and 1986). Son precisamente estas propiedades y características específicas de los circuitos no lineales las que sirven de base al funcionamiento de múltiples dispositivos y equipos, sin los cuales no sería concebible la técnica moderna. A continuación se enumeran y explican los fenómenos principales que tiene lugar exclusivamente en circuitos no lineales. 1.4.1. No cumplimiento del principio de superposición El principio de superposición es una propiedad fundamental de los circuitos lineales, en la cual se basan los métodos de análisis más poderosos.. Figura 1.10 Para el circuito lineal muy simple, como el mostrado en la figura 1.10 el principio de superposición implica que: Para e. e. 1. i. i. 1. G e1.
(33) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 24. SOLUCIÓN. e. e. e. e1 e. 2. 2. i. i. i. i i. 2. 1. G e2 G e1 G e2. 2. En un circuito no lineal también muy simple, como el mostrado en la figura 1.9 b, cuya característica puede aproximarse según la expresión i. au 2. 2. (1.4.1) se tiene que:. Para 2. e. e. i. i a e1. e. e. i. i a e2. e. e e. i. a (e e 2) i i. 1. 2. 1. 2. 1. 2. 2. 2. 2. 2. 2. 1. 1. 2. No se cumple el principio de superposición. De esto se deriva que el modelo matemático en este caso son ecuaciones no lineales, para las cuales no existe una teoría de solución. Cobran entonces importancia los métodos numéricos, gráficos y aquellos que permiten evaluaciones cualitativas(Korn, 1961). Compárese esta situación con la existente para los circuitos lineales, donde siempre se puede llegar a una solución exacta por métodos analíticos. Otra consecuencia del no cumplimiento de principio de superposición es que en los circuitos no lineales la magnitud de la señal a la salida no es proporcional a la magnitud de la señal a la entrada. Es decir, para el circuito de la figura 1.9 se cumple i. Gu ó. i u. G. Existe una relación de proporcionalidad directa, siendo. G. la constante de. proporcionalidad. Una expresión análoga es imposible de obtener para el circuito en la figura 1.9 b cuya característica se expresa como (1.4.1). Esta es una propiedad de todo circuito no lineal y es el fundamento de los dispositivos utilizados como estabilizadores de voltaje y corriente..
(34) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 25. SOLUCIÓN. Por otra parte, es posible que, existiendo estímulo, para un determinado intervalo de valores de este no haya respuesta (ver figura 1.3). Dispositivos de este tipo se utilizan como rectificadores(Alba, 1987, Weiland, 2010). 1.4.3. Propiedades específicas de los circuitos no lineales Aparte de los aspectos ya explicados, en los circuitos no lineales se presentan fenómenos específicos, que no tienen analogía ni comparación con ningún proceso existente en circuitos lineales. Una propiedad importantísima en los circuitos no lineales es su capacidad de producir amplificación de voltaje, corriente y potencia en una banda ancha de frecuencias(Angelov et al., 1995). Los circuitos no lineales pueden tener en ocasiones más de una respuesta o estado de equilibrio, para un mismo estímulo aplicado. Un ejemplo de esto aparece en la figura 1.11.. Figura 1.11 En estos circuitos lineales, siempre un estímulo determinado produce la misma respuesta; en este ejemplo se ve que la respuesta va a depender de la zona de la característica en que se trabaje (A, B, o C). Algunos de los posibles estados de equilibrio resultan inestables, como el denominado B en la figura 1.10 y el circuito no puede funcionar en ellos..
(35) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 26. SOLUCIÓN. Esto hace que aun cuando el estímulo varíe de forma continua, en la respuesta pueden aparecer saltos. En la figura 1.10 si la magnitud de la corriente se aumenta continuamente a partir de cero, el voltaje ira aumentado también en forma continua según muestra la característica, que se recorre en el sentido de la flecha desde el punto 0 al D. Cuando la corriente alcanza el valor. I. P. correspondiente al voltaje. U P , un ligero incremento de la 1. primera hace que el voltaje salte al valor. UP. pasando al punto E de la característica 2. según indican las flechas. Esta es otra situación que se representa únicamente en circuitos no lineales (Alba, 1987). 1.5. ANALISIS DE CIRCUITOS NO LINEALES RESISTIVOS PUROS Se procederá a continuación a describir los principales métodos de análisis de circuitos no lineales para el caso en que estos son resistivos. El modelo matemático en este caso es el sistema de ecuaciones algebraicas no lineales:. f ( x ,...x ,...x , t ) k. 1. Dónde:. i. n. 0, k 1,...n. n= orden del sistema de ecuaciones. x. i. = variable del circuito, voltaje o corriente. t = variable tiempo, hay que tenerla en cuenta si el estímulo depende del tiempo Como las ecuaciones son algebraicas y no diferenciales, no aparecen retraso o diferencia de fase entre las variables de estímulo y respuesta. Esta es una propiedad importante ya que entonces se puede resolver el sistema ´´ paso a paso´´, es decir:. f. ik. ( xi ,...xn). 0,. k. 1,...n para t. t. i. Se resuelve el sistema de n ecuaciones con n incógnitas para cada uno de los diferentes instantes. t. i. La formulación del sistema se base en las leyes de Kirchhoff, ya que los métodos generales no son aplicables pues se basan en superposición. Para resolver las ecuaciones se usan.
(36) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 27. SOLUCIÓN. principalmente métodos numéricos, tales como el método de aproximaciones sucesivas o Newton-Raphson. Este procedimiento de solución requiere de las características de los elementos no lineales en forma analítica. Los resultados se obtienen como un objeto de valores numéricos y debe resaltarse el hecho de que si cambian los estímulos hay que repetir completamente todo el procedimiento de solución(Hoft, 1986).. Figura 1.12 Otra forma de analizar circuitos no lineales resistivos consiste en obtener para ellos las características de entrada o de transferencia mediante diversas manipulaciones con las características de los elementos. Estas pueden estar expresadas tanto en forma de gráficos como analíticamente, siendo por ejemplo, para el esquema de la figura 1.12: u. f (e), i. f (e) o en general. f. 2. f(f ) 1. Una vez determinada la característica deseada para el circuito no lineal, es posible en forma gráfica determinar la forma de onda de la señal de salida para cualquier estímulo. En la figura 1.13 se muestra un procedimiento posible para esto. A partir de la señal de entrada, figura 1.13 a, se toman diferentes puntos que a través de la recta de transformación, figura 1.13 b, se llevan a la característica, figura 1.13 c. Aquí queda determinado el valor de la señal de salida. f. 2. . Este se proyecta hacia el gráfico, figura 1.13. d, en el cual se sitúa coincidiendo en el tiempo con la señal de estímulo..
(37) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 28. SOLUCIÓN. Figura 1.13. Otra variante para el análisis del gráfico se muestra en la figura 1.14. Aquí los valores de la señal de entrada figura 1.14 a, se proyectan directamente sobre la característica, figura 1.14 b, obteniéndose punto a punto la forma de la señal de salida. f. 2. (t ) , figura 1.14 c. Este.
(38) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 29. SOLUCIÓN. procedimiento tiene la particularidad de que no se puede observar la correspondencia en el tiempo para las señales de entrada y salida(Chungkin, 1987). Nótese que en este método de análisis, como se trabaja con las funciones de transferencia, si cambia el estímulo sólo es necesario calcular la nueva respuesta sin tener que repetir el procedimiento completo. Otra variante es el método de linealización por partes, que consiste como ya se explicó, en sustituir tramos de las características de los elementos no lineales por rectas, siendo por tanto necesario resolver un conjunto de circuitos lineales(Roos, 1994).. Figura 1.15 Cuando un dispositivo o circuito no lineal es estimulado por una señal de amplitud pequeña, puede considerarse que en el intervalo en que ocurren las variaciones la característica es lineal (ver figura 1.15). De esto se derivan los denominados modelos de pequeña señal, que representan la operación del dispositivo mediante circuitos con componentes lineales, usualmente resistencias dinámicas y en ocasiones fuentes dependientes(Angelov et al., 1995). Estos modelos permiten realizar el análisis utilizando los métodos analíticos conocidos para circuitos lineales, debiendo recalcarse que esto es válido siempre que la variación de corriente y voltaje sea tan pequeña que la suposición de linealidad sea válida, es decir, los parámetros se mantienen constantes en el intervalo de trabajo..
(39) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 30. SOLUCIÓN. Con mucha frecuencia este procedimiento se emplea cuando la excitación es la suma de componentes de directa y de alterna, sirviendo la CD para fijar el punto de trabajo en l característica (U 0 , I 0 en la figura 1.15). Para pequeñas variaciones entorno al punto de operación, puede plantearse que i =Constante = GD u. Recordando la definición dada para los parámetros dinámicos en el subepígrafe 1.2.2. El modelo de pequeña señal es en este caso una conductancia (o resistencia) de valor. G. D. (o. 1. G. ) . D. En la figura 1.15 se muestran dos modelos de pequeña señal de un transistor bipolar a bajas frecuencias, a modo de ilustrar la forma que pueden tomar estos modelos para dispositivos más complejos. Dado que el procedimiento de análisis en este caso implica la solución de circuitos lineales por los métodos conocidos (bajo la condición ya señalada de pequeñas variaciones en torno al puto de trabajo) en realidad esto no implica el análisis de un circuito no lineal, por lo que, en este tema, no se volverá a insistir en este procedimiento, aunque si se señalará su aplicación en caso de circuitos no lineales inductivos y capacitivos(Itoh, 1997).
(40) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 31. SOLUCIÓN. Figura 1.16 Resumiendo, puede decirse que los métodos de análisis de circuitos no lineales resistivos pueden ser: Solución de las ecuaciones; es más general y se basa en métodos matemáticos; Métodos estructurales; se basa en la posibilidad de simplificar el circuito para obtener las características de entrada o transferencia; Linealización por partes; es un intermedio entre los dos anteriores. A continuación se explicará cada uno de ellos(Row, 1970). 1.6. MÉTODO ESTRUCTURAL Este método es muy fácil de entender, aunque su realización conlleva determinada cantidad de trabajo numérico. Es especialmente útil para circuitos de estructura en escalera y una sola fuente, como el mostrado en la figura 1.17 a..
(41) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 32. SOLUCIÓN. Figura 1.17 Mediante reducción de las combinaciones serie paralelo puede llegarse hasta un esquema como el de la figura 1.17 b, donde se ha determinado la característica de entrada, o al de la figura 1.17 c, correspondiente a la relación de transferencias de voltajes. Si hay varias fuentes, este método es aplicable cuando sea posible reducir a un circuito equivalente con una sola fuente. A continuación se explicará la forma de realizar las combinaciones más simples, para elementos no lineales en serie y paralelo y después se ilustrará el procedimiento para circuitos más complejos(Alba, 1987). 1.6.1. Conexión de elementos no lineales en serie.
(42) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 33. SOLUCIÓN. Figura 1.18 En la figura 1.18 a se muestra la conexión serie de dos resistores no lineales cuyas características se dan en la figura 1.18 b. Se desea obtener la característica del resistor equivalente tal que el voltaje y la corriente entre sus terminales sean idénticos a los que aparecen entre sus terminales de la combinación, figura 1.18 b. Como los resistores no lineales están en serie, la corriente por ambos es la misma, siendo el voltaje total la suma de los voltajes en ambos elementos, es decir:. i i 1. u u 1. i. 2. 2. u. (1.6.1). La característica del resistor equivalente puede obtenerse entonces aplicando estas condiciones. Para varios valores de corriente se determinan los voltajes en los resistores 1 y 2 y el voltaje total es la suma. En la figura 1.43 c se han representado simultáneamente las características de los resistores 1 y 2 y la total. Para cada valor de corriente señalado se cumple la condición (1.6.1), siendo la característica deseada la unión de todos los puntos..
(43) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 34. SOLUCIÓN. Este procedimiento puede realizarse también con las características analíticas aproximadas, es decir, si se conoce que:. u a a 1. 10. 11. u a a 2. 20. ai. i. 21. 2. 12. i. a i. 2. 22. La característica resultante para los resistores conectados en serie es:. u u. u. 1. 2. (a10. a. 20. ) (a11. a. )i (a12. 21. a )i. 2. 22. Debe señalarse que este procedimiento es aplicable cualquiera que sea la cantidad de elementos en serie, no necesariamente dos(Milnes, 1980). Igualmente, si alguno de los resistores es lineal, se trabaja como se ha explicado, pero en este caso con la característica lineal(Stern, 1965). 1.6.2 Conexión de elementos no lineales en paralelo Igualmente se desea obtener en este subepígrafe la característica del resistor equivalente, en este caso de dos conectados en paralelo. En la figura 1.19 el circuito y las características de cada uno de los elementos.. Figura 1.19 Como los resistores están conectados en paralelo, en este caso se cumple que:. u u 1. 2. u.
(44) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 35. SOLUCIÓN. i i 1. i. 2. (1.6.2). La característica equivalente se obtiene aplicando estas condiciones. Para varios valores de voltaje se determinan las corrientes en los resistores 1 y 2 y la corriente total es la suma. En la figura 1.19 b se ha representado conjuntamente las características de los elementos individuales. Para cada valor de voltaje señalado se cumple la condición (1.6.2) siendo la característica deseada la unión de todos los puntos. Puede analizarse fácilmente que este circuito es el dual del serie y por tanto se cumple también dualidad en el procedimiento de análisis(Alba, 1987). Si se dispone de las características analíticas aproximadas:. i a a 1. 10. 11. i a a 2. 20. La. i. au. u. a u. 21. 12. 1. 2. (a10. 2. 22. característica. i i. 2. u. resultante. a. 20. ) (a11. para. a. los. )u (a12. 21. resistores. a )u. conectados. en. paralelo. es:. 2. 22. 1.6.3. Determinación de características de entrada y de transferencia A partir de procedimiento básico para la obtención de las características de los resistores en serie y paralelo, puede pasarse al análisis del método para determinar características de entrada y de transferencia en circuitos de mayor complejidad. Se analizará inicialmente el procedimiento para determinar las características de entrada para el circuito de la figura 1.20 a..
(45) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 36. SOLUCIÓN. Figura 1.20 Se tienen como datos las características volt-ampere de cada uno de los elementos componentes. Puede establecerse una comparación entre el procedimiento a seguir si el circuito fuera lineal y el necesario en este caso, en que es no lineal. Para obtener la resistencia equivalente o de entrada, en el primer caso se reducen los dos resistores en paralelo a su equivalente y de nuevo se combinan los dos resistores resultantes, esta vez en serie para obtener el resistor equivalente final(Kundert, 1987). En este caso de elementos no lineales también es posible obtener un equivalente de los dos elementos en paralelo según el procedimiento explicado en el subepígrafe 1.6.2 (ver figura 1.21). Figura 1.21 El circuito serie resultante se analiza como se explicó en el subepígrafe 1.6.1, obteniéndose así la característica de entrada equivalente del circuito completo. En la figura 1.22 se ilustra el procedimiento gráficamente..
(46) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 37. SOLUCIÓN. En la figura 1.21 b se analizará la combinación de los dos resistores en paralelo, sumando los valores de corriente para diferentes voltajes, obteniéndose la característica auxiliar 2.3. En la figura 1.22 b se realizará la combinación de los dos resistores en serie, el existente físicamente en el circuito y el resultante de la transformación mostrada en la figura 1.21.. Figura 1.22 En esa misma figura aparece la característica de entrada resultante. Como se señaló inicialmente, el método gráfico de solución es especialmente útil para redes de estructura en escalera, cuya forma general se recuerda en la Figura 1.23. Como regla, los elementos aparecen sucesivamente en serie o en paralelo.. Figura 1.23 Los elementos en serie se reducen sumando las características a corriente común y los elementos en paralelo se reducen sumando las características a voltaje común. Si algunos resistores son lineales el procedimiento no se modifica, trabajándose con su característica, en este caso lineal(Soveiko, March 2004)..
(47) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 38. SOLUCIÓN. Figura 1.24 Se analizará ahora el procedimiento para el cálculo de la características transferenciales. Se estudiará, en primer término, el circuito de la figura 1.24 a con el fin de obtener la característica. u (u ) . 2. 1. Se dispone de la característica volt-ampere de cada uno de los elementos, figura 1.24 b. En este caso, a partir de las leyes de Kirchhoff se tiene que:. u u u 1. 3. 2. i i i 3. 2. 1. Es decir, la corriente por los dos resistores no lineales es la misma. Tomando como base esta condición, es posible obtener, sumando las características (2) y (3) a corriente común, la suma. u ( i ) . Esto se muestra en la figura 1.25 a. Teniendo siempre como base que la 1. 1. corriente para esta configuración es común, se puede, para determinados valores de. u. corriente, conocer los valores de los voltajes gráfico trazado situando para cada valor de de. u. 2. 1. u. 1. y. u . En la figura 1.25 b se muestra el 2. en el eje de las abscisas el correspondiente. en las ordenadas. Esta es la característica transferencial deseada..
(48) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 39. SOLUCIÓN. Figura 1.25 Analizando el procedimiento empleado, se encuentra que este se ha basado en obtener la característica de entrada y después, sobre la base de las relaciones entre las variables voltaje y corriente impuestas por las leyes de Kirchhoff, determinar, para cada valor de la variable independiente (en este caso u1 ), el valor de la variable dependiente (en este caso. u. 2. ). En. general, este será siempre el mecanismo para determinar una característica de transferencia, recordando que las redes de estructura en escalera son las más aconsejables para la aplicación de este método(Chua, 1969). 1.6.4. Circuitos con fuentes. Punto de operación Una vez determinada la característica de entrada o de transferencia de un circuito no lineal, puede obtenerse, por métodos gráficos, la respuesta para diferentes estímulos(website, 2010b). El procedimiento se explicó ya en el subepígrafe 1.5 (ver Figura 1.12 y 1.13) por lo que no es necesario añadir ahora nada nuevo conceptualmente. Se realizará a continuación ejemplos para estímulos constantes y variables con el tiempo..
(49) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 40. SOLUCIÓN. Una vez resueltos estos ejemplos de solución gráfica de circuitos no lineales puede realizarse un pequeño resumen: No siempre es necesario determinar la característica equivalente, puede ser que la respuesta se obtenga directamente sin necesidad de esto; Para estímulo de CD la respuesta es simplemente un punto de la característica, es decir, también una señal de CD; para estímulo variable en el tiempo la respuesta será una función de forma de onda diferente (recuérdese la aparición de nuevas frecuencias); En dependencia de la zona de la característica en que se trabaja, puede variar grandemente el comportamiento de circuito(Dommel, 1971). 1.7. LINEALIZACIÓN POR PARTES Como se mencionó en el epígrafe 1.5, este es otro método que se puede utilizar para el análisis de circuitos resistivos no lineales.. Figura 1.26 Se basa en aproximar la característica del elemento no lineal mediante segmentos de rectas (subepígrafe 1.3.3) tal como se muestra en la figura 1.26 para un caso general. El circuito no lineal del cual forma parte este elemento puede entonces describirse mediante un conjunto de ecuaciones lineales, cada una de ellas valida en uno de los intervalos o partes lineales de la característica(Land 2007). La complejidad del procedimiento de solución aumenta con el número de partes lineales, por lo que estas deben escogerse de forma que cada una aproxime el mayor intervalo.
(50) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 41. SOLUCIÓN. posible de la característica, a fin de tener que trabajar con un número pequeño de intervalos lineales(website, 2010a). Los segmentos de recta utilizados para la aproximación no tienen que ser tangentes a la curva original, aunque es aconsejable que no se aparten mucho de ella. La idea es escoger el número mínimo de segmentos lineales que den una buena aproximación (Alba, 1987).. Figura 1.27 Para establecer el conjunto de ecuaciones lineales que describen el comportamiento del circuito en este caso, resulta de buena ayuda representar el elemento no lineal mediante un esquema equivalente lineal. De la Figura 1.27 se tiene que para el tramo representado la ecuación de la recta es:. i. Gu iu k. k. k 1. u. u. (1.7.1). k. G i. I u. k. k.
(51) CAPÍTULO 1. RESUMEN TEÓRICO SOBRE LOS CIRCUITOS NO LINEALES , MÉTODOS DE. 42. SOLUCIÓN. Figura 1.28 Que tiene como representación circuital la mostrada en la Figura 1.28. Este esquema puede utilizarse para representar al elemento no lineal en toda la característica, teniendo en cuenta que en cada tramo deben cambiar los valores de los parámetros G k e. I. k. .. Puede obtenerse una representación en función de fuentes de voltaje y resistores, tal como la mostrada en la Figura 1.29. A esta se llega transformando el circuito de la Figura 1.28 o directamente de la ecuación (1.7.1) despejando el voltaje:. u. 1. G. i k. I G. k. Ri E k. (1.7.2). k. k. R. k. E. I G. k. k. k. +. i. U Figura 1.29. Igualmente, con este esquema se puede representar al elemento no lineal en toda la característica, cambiando de forma apropiada los valores de los parámetros. R. k. y. E. k. .. De esta forma, es posible remplazar un circuito no lineal por un conjunto de circuitos lineales, que describen adecuadamente el comportamiento real cada uno en su intervalo de validez. Pero precisamente en la determinación de estos intervalos de validez esta la dificultad principal que representa la aplicación de este método; resulta necesario poder determinar los puntos de frontera, de cambio de pendiente y esto conlleva en muchos casos la necesidad de un proceso de tanteo(Alba, 1987, Chua, Junio 1971)..
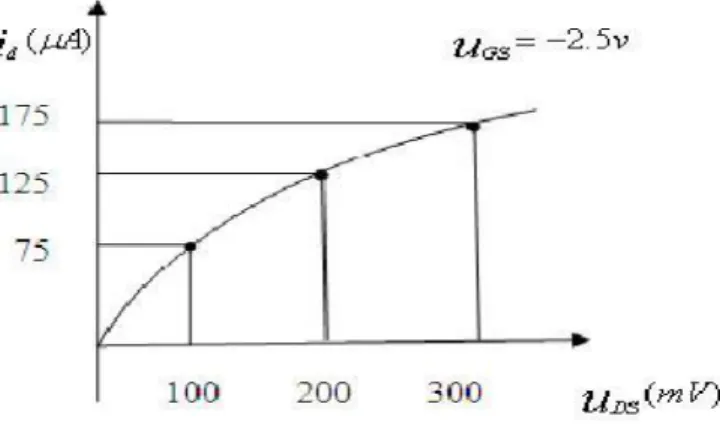
(52) CAPÍTULO 2. SOLUCIÓN DE CIRCUITOS NO LINEALES USANDO LA SOLUCIÓN, POLINÓMICA, EL MÉTODO ESTRUCTURAL, LINEALIZACIÓN POR PARTES Y EL MATLAB.. Ejemplo 1.1. En la figura 1.30 se muestra la característica de un resistor controlado por voltaje. Obtener la aproximación polinómica correspondiente según los valores numéricos de que se dispone.. Figura 1.30 Resolución: Del gráfico se observa que se conocen 4 pares de valores i, u, incluyendo el origen, por lo que el polinomio que se ha de utilizar debe ser de grado tres. Es decir, a partir de (1.3.1): m. i. 2. a au au au 0. 1. 2. 3. 3.
(53) CAPÍTULO 2. MATERIALES Y MÉTODOS. 44. El sistema de ecuaciones que hay que resolver para el cálculo de los coeficientes es, según (1.3.2):. a a (0) a (0) a (0). 0. 0. 1. 2. 3. a a (100) a (100)2 a (100)3. 75. 0. 1. 2. 3. 125. a a (200) a (200)2 a (200)3. 175. a a (300) a (300)2 a (300)3. 0. 1. 0. 2. 1. 3. 2. 3. Donde se obtienen los siguientes resultados:. a. 0. a. 0.9583. 0. 1. a. 2. a. 3. 0.0025 4.166. 10. 6. Por lo que el polinomio es:. i. 0.9583u 0.0025u. 2. 4.166. 6. 10 u. 3. Esta función coincide con los valores u-i de la figura 1.30 con muy buena aproximación. Es importante puntualizar que este polinomio no puede considerarse como aproximación a la característica para valores fuera del intervalo R. MATLAB: Programa: (Ver anexo I) La Figura 1.31 muestra el resultado final.. 0. u. 300mV ..
(54) CAPÍTULO 2. MATERIALES Y MÉTODOS. 45. Figura 1.31. Ejemplo 1.2. Para la característica mostrada en la figura 1.30 se dispone de cuatro pares de valores i-u. La fórmula general de LaGrange es en este caso: Resolución:. i(u ). u )(u u )(u u ) i( u u )(u u )(u u ) (u. 1. 0. i. 1. 2. 3. 0. 1. 0. 2. 0. 3. u )(u u )(u u ) (u u )(u u )(u u ) (u 1. 0. 0. 2. 1. 2. 3. 1. 3. u )(u u )(u u ) i ( u u )(u u )(u u ) (u. 0. 1. 3. 2. 2. i. 2. 1. 2. 3. u )(u u )(u u ) (u u )(u u )(u u ) (u. 3. 0. 3. 0. 0. 1. 3. 1. 2. 3. 2. Sustituyendo los valores numéricos:.
(55) CAPÍTULO 2. MATERIALES Y MÉTODOS. i(u ) 0 75. u (u 200 )(u 300 ) 100 (100 200 )(100 300 ). 125. u (u 100 )(u 300 ) 200 (200 100 )( 200 300 ). 175. u (u 100 )(u 200 ) 300 (300 100 )(300 200 ). Resolviendo numéricamente:. i(u) 37,5. 62.5. 10. 29.16. 10. 10 6. 6. 6. u(u 200)(u 300). u(u 100)(u 200). u(u 100)(u 200). Agrupando:. i(u). 0.9582u 0.00249u. 2. 4.16. R.MATLAB: Programa: (Ver anexo I) La figura 1.32 muestra el resultado final.. 6. 3. 10 u. 46.
(56) CAPÍTULO 2. MATERIALES Y MÉTODOS. 47. Figura 1.32 Ejemplo 1.3. Para la característica mostrada en la figura 1.30, obtener la aproximación polinómica según la fórmula de Newton-Horner. Resolución: Como se sabe, se dispone de 4 pares de valores i-u, por lo que en este caso la fórmula a utilizar es la (1.3.17). Se calcularán las diferencias divididas, en primer término; para facultar las operaciones numéricas se repiten los valores de los datos:. ( x0 , y ). (u0 , i0). ( x1 , y ). (u1 , i1). ( x2 , y ). (u2 , i2). (200,125). ( x3 , y ). (u3 , i3). (300,175). 0. 1. 2. 3. (0,0) (100,75). Cálculo de las diferencias divididas necesarias:. y ( x0 , x1). 75 0 100 0. y ( x0 , x1 , x2). 0.75. y ( x1 , x2) y ( x0 , x1). x x 2. 0. Se requiere para obtener este valor hallar primero. y( x1 , x2) : y( x1 , x2). Entonces. y ( x0 , x1 , x2). Falta calcular. 125 75 200 100 0.5 0.75 200. y( x0 , x1 , x2 , x3). 0.5. 0.00125.
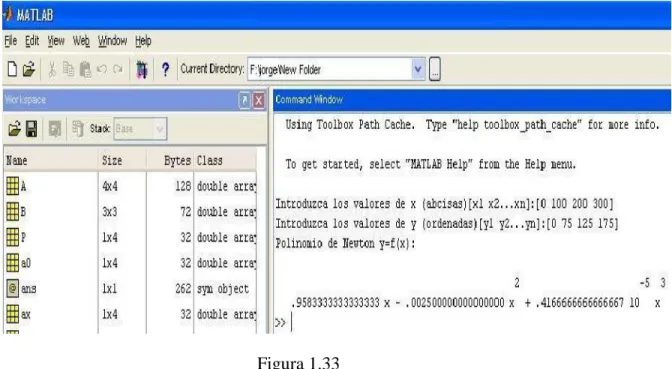
(57) CAPÍTULO 2. MATERIALES Y MÉTODOS. 48. Para lo cual se requiere. y ( x1 , x2 , x3). y ( x2 , x3) y ( x1 , x2). x x 3. 1. Solo se necesita ahora. y( x2 , x3). 175 125 300 200. 0.5. Por lo que. y( x1 , x2 , x3). 0.5 0.5 300 100. 0. Y entonces. y( x0 , x1 , x2 , x3). 0 0.00125 300. 4.17. 10. 6. El polinomio resultante es:. y ( x). 0 x(0.75). x( x 100)( 0.00125). x( x 100)(x 200)(4.17. 10. 6. ). Ordenando los términos y expresando el resultado en función de las variables del problema:. i(u ) 0.9584u 0.0025u. 2. 4.17. R. MATLAB: Programa: (Ver anexo I) La figura 1.33 muestra el resultado final.. 10 u 6. 3.
(58) CAPÍTULO 2. MATERIALES Y MÉTODOS. 49. Figura 1.33 Ejemplo 1.4 Para el resistor no lineal cuya característica se muestra, obtener una expresión analítica por el método de mínimos cuadrados.. u (mV ) -400 -300 -200 -100 0 100 200 300 400 i( A) -212.5 -175 -125 -75 0 75 125 175 212.5 Resolución: Se trata del mismo dispositivo utilizado para los ejemplos anteriores, deseándose en este caso la expresión analítica en el intervalo:. 400 u. 400mV. Como se trata de una característica impar, puede escogerse un polinomio impar, este es:. y. 3. ax ax 1. 3. En este caso. i. au au 1. 3. 3.
(59) CAPÍTULO 2. MATERIALES Y MÉTODOS. Para el cálculo de los coeficientes a1 y. a. 50. deben utilizarse las expresiones (1.3.21),. 3. (1.2.22) y (1.3.23). Como en este caso no existen los coeficientes. a. 0. y. a. , no se. 2. consideran para las variables l y k los valores 0 y 2, quedando entonces el sistema (1.3.23) como: 11. a. 13. a. 31. a. 33. a. 1. 1. 3. 1. 3. 3. y las expresiones (1.3.21) y ( 1.3.22): 4. xi. 11 i 0. 4. 2 1. 4 13. 31 i 0 4. 33 i 0. xi. xi. i 0. yi x. i. 4. 4 3. i 0. y xi. 3. i. 6. Nótese que para la variable i que indica los puntos de la característica, pueden considerarse solo los valores del primer cuadrante, ya que por ser el polinomio (1.3.24) impar, la parte negativa se satisface automáticamente. Realizando los cálculos numéricos: 2. 2. 2. 2. 4. 4. 4. 4. 10. 6. 6. 6. 6. 15. 5. 11. (100) (200) (300) (400) 3.10. 13. (100) (200) (300) (400) 3.54*10. 33. (100) (200) (300) (400) 4.89*10. 1. (100)(75) (200)(125) (300)(175) (400)(212.5) 3. 3. (75 ) (100). 3. (125 ) (200). 3. (175 ) (300). 5. 1.7*10. 3. (212 .5) (400). 10. 1.94*10.
(60) CAPÍTULO 2. MATERIALES Y MÉTODOS. El sistema a resolver es: 10. 5. 3*105a 3.54*10 a 1.7*10 3. 1. 15. 10. 3.54*1010a 4.89.*10 a 1.94*10 3. 1. Con lo que se obtiene los valores:. a. 1. 0.676u. a. 3. 9.26 *10. 7. El polinomio resultante es:. i. 0.676u 9.26*10. 7. u. 3. R.MATLAB: Programa: (Ver anexo I) La figura 1.34 muestra el resultado final.. Figura 1.34. 51.
(61) CAPÍTULO 2. MATERIALES Y MÉTODOS. 52. Ejemplo 1.5 Para el resistor no lineal del circuito de la figura 1.35 se muestra la característica en la figura 1.36.. Figura 1.35. Figura1.36 a) Si en los terminales I I´ se conecta una fuente de voltaje de valor 0.25 volt. ¿Cuál será la corriente total? b) Si en los terminales I I´ se conecta una fuente de corriente de valor 200 y cuyo sentido coincide con el indicado en la figura. ¿Cuál será el voltaje total? c) Si cambia el sentido de la fuente en el inciso b. ¿Cuál será el voltaje total?.
(62) CAPÍTULO 2. MATERIALES Y MÉTODOS. 53. Resolución:. Figura 1.37 a) Para este caso en que el estímulo es una fuente de voltaje, la corriente total es simplemente la suma de las corrientes por el resistor lineal ( ) y por el resistor no i2 lineal. ( i3 ). .. La corriente. i. 0.25 2. 3. 2.10. ( i2 ). se calcula directamente como:. 125 A. La corriente. se obtiene de la. ( i3 ). característica del resistor no lineal. Para un. voltaje de 250mV resulta:. i. 3. 150 A. La corriente total es:. i i i 1. 2. 3. i. 1. 125 150 275 μ A. Figura 1.38 b) En este caso no es posible obtener la respuesta en forma tan simple como en el inciso a) siendo necesario realizar el procedimiento explicado en el subíndice 1.6.2 a fin de obtener.
Figure

Documento similar
La Normativa de evaluación del rendimiento académico de los estudiantes y de revisión de calificaciones de la Universidad de Santiago de Compostela, aprobada por el Pleno or-
La definición del material fíbrico, hémico o sáprico, material parcialmente descompuesto y descompuesto, así como el color en pirofosfato, fueron indicadores del grado de
En estas modificaciones se busca aumentar el orden, mejorar la rapidez de convergencia (m´ etodos aceleradores de la convergencia), tratar de eliminar el uso de derivadas, aplicar el
Gastos derivados de la recaudación de los derechos económicos de la entidad local o de sus organis- mos autónomos cuando aquélla se efectúe por otras enti- dades locales o
Lo que se pierde en extensión se gana en profundidad, se nos dice. Ello es verdad si se admite que esta profundidad es limitada incluso desde el punto de vista funcional. ¿Por qué se
• El conjunto solución de un sistema de ecuaciones lineales, está formado por todas las soluciones del sistema.. • Dos sistemas de ecuaciones lineales son equivalentes, si tienen
En la primera parte, se utilizaron métodos numéricos avanzados para la solución de las ecuaciones de Navier-Stokes para simular el flujo alrededor de diferentes clases de barcos
Iniciamos el estudio de los métodos de solución de Ecuaciones Diferenciales Ordinarias (EDO) con la resolución de ecuaciones separables por simple integración de la expresión
