Despeje de niebla en imágenes de exteriores mediante la transformación de la luminancia
108
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubian” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. “Siempre es buen momento para hacer lo correcto”. Martin Luther King Jr..
(5) ii. DEDICATORIA. A los estudiantes que continúen investigando en el mundo digital de las imágenes..
(6) iii. AGRADECIMIENTOS. A mis padres, por apoyarme todo el tiempo y darme el buen consejo, A mis hermanos, por ser mis hermanos, y compartirlo todo, Y en especial a mis amigos, todos ellos, desde el mayor hasta el menor, por todo cuanto han hecho y harán por mí..
(7) iv. TAREA TÉCNICA. -. Realizar una revisión bibliográfica sobre el tema, sistematizando la información obtenida y haciendo un análisis crítico de la misma.. -. Realizar un estudio detallado del problema de la reducción de la niebla en imágenes de exteriores mediante técnicas de transformación de la luminancia.. -. Programar en MATLAB un algoritmo capaz de combinar distintos métodos de transformación de la luminancia para la obtención de una variedad de resultados posibles.. -. Realizar un estudio comparativo a través de una evaluación subjetiva para determinar un estándar de preferencia entre los resultados obtenidos.. -. Realizar comparaciones con otros métodos existentes para determinar los niveles de eficacia y aplicabilidad del nuevo método desarrollado.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En este trabajo se realiza una búsqueda de un método computacional rápido para la reducción de niebla presente en imágenes tomadas en escenas de exteriores. Partiendo de la utilización del software MATLAB se determinaron posibles soluciones al problema a través de diferentes procedimientos de conversión a escala de grises, métodos de realce de imágenes y combinando y probando distintos espacios de colores. De las combinaciones más plausibles se tomó una muestra de seis métodos que fueron sometidos a una evaluación subjetiva por observadores con experiencia en el campo del procesamiento digital de imágenes. Luego de un análisis estadístico se seleccionó el método preferido por los votantes, denominado GRACE (Grayscale Replacement using Adaptive Contrast Enhancement), y se realizó una comparación con el algoritmo DCP (Dark Channel Prior), donde se encontraron algunas ventajas en cuanto a tiempo de procesamiento y calidad en el nivel de detalle de las escenas. La obtención de un procedimiento eficiente, efectivo y adaptable a las características de la escena continúa siendo objeto de investigaciones en la actualidad en todo el mundo..
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO ............................................................................................................................. i DEDICATORIA ............................................................................................................................. ii AGRADECIMIENTOS ................................................................................................................. iii TAREA TÉCNICA ........................................................................................................................ iv RESUMEN ..................................................................................................................................... v INTRODUCCIÓN .......................................................................................................................... 9 CAPÍTULO 1.. FUNDAMENTOS TEÓRICOS ........................................................................ 12. 1.1. Fenómenos físicos relacionados con la obtención de imágenes en escenas con niebla... 13. 1.2. Importancia de la reducción de la niebla en imágenes de exteriores ............................... 14. 1.3. Trabajo previo y estado del arte ....................................................................................... 14. 1.4. Trabajo con imágenes RGB ............................................................................................. 17. 1.5. Espacios de colores .......................................................................................................... 19. 1.6. Necesidad de conversión a escala de grises ..................................................................... 21. 1.7. Las funciones imadjust(), histeq() y adapthisteq() de MATLAB.................................... 22. 1.7.1. La función imadjust().................................................................................................... 22. 1.7.2. La función histeq() ........................................................................................................ 23. 1.7.3. La función adapthisteq() ............................................................................................... 24.
(10) vii 1.8. Evaluación de la calidad de las imágenes ........................................................................ 25. 1.9. Pruebas no paramétricas para el análisis de datos estadísticos ........................................ 30. 1.9.1. Prueba de Mann-Whitney ............................................................................................. 31. 1.9.2. Prueba de Kolmogórov-Smirnov .................................................................................. 33. 1.9.3. Prueba de Kruskal-Wallis ............................................................................................. 33. 1.9.4. Diagramas de caja ......................................................................................................... 34. 1.10. Conclusiones del capítulo .............................................................................................. 34. CAPÍTULO 2.. MÉTODO PARA LA REDUCCIÓN DE LA NIEBLA ................................... 36. 2.1. Descripción del método ................................................................................................... 36. 2.2. Descripción del programa hecho en MatLab ................................................................... 37. 2.1.1. Conversión de la imagen RGB original a distintos espacios de colores de luminancia-crominancia ......................................................................................... 38. 2.1.2. Conversión de la imagen RGB original a escala de grises ....................................... 39. 2.1.3. Realce de las imágenes en escala de grises ............................................................... 40. 2.1.4. Recuperación del color en las imágenes ................................................................... 41. 2.1.5. Conversión de distintos espacios de luminancia-crominancia al espacio de colores estándar RGB ......................................................................................................... 41. 2.3. Proceso de variación de parámetros ................................................................................. 43. 2.3.1. Variación de los parámetros de la función imadjust() .................................................. 43. 2.3.2. Variación de los parámetros de la función histeq() ...................................................... 44. 2.3.3. Variación de los parámetros de la función adapthisteq() ............................................. 44. 2.4. Evaluación subjetiva ........................................................................................................ 45. 2.4.1. Diseño del experimento ................................................................................................ 46. 2.4.2. Características de los observadores .............................................................................. 49. 2.4.3. Características del monitor ........................................................................................... 50.
(11) viii 2.5. Utilización de pruebas estadísticas para la determinación del método más efectivo ...... 50. 2.6. Conclusiones del capítulo ................................................................................................ 50. CAPÍTULO 3.. RESULTADOS Y COMPARACIONES.......................................................... 52. 3.1. Selección de imágenes ..................................................................................................... 52. 3.2. Resultados de la variación de parámetros ........................................................................ 54. 3.3. Resultados de la evaluación subjetiva.............................................................................. 56. 3.4. Resultados del análisis estadístico no paramétrico .......................................................... 58. 3.5. Comparación con otros métodos ...................................................................................... 64. 3.6. Conclusiones del capítulo ................................................................................................ 68. CONCLUSIONES Y RECOMENDACIONES ........................................................................... 69 Conclusiones ............................................................................................................................. 69 Recomendaciones ..................................................................................................................... 70 REFERENCIAS BIBLIOGRÁFICAS ......................................................................................... 71 ANEXOS ...................................................................................................................................... 78 Anexo I. Comparación de resultados con el método DCP................................................... 78. Anexo II. Planilla usada en la evaluación subjetiva ............................................................ 97. Anexo III. Código en MATLAB del algoritmo GRACE .................................................... 98.
(12) INTRODUCCIÓN. En muchas ocasiones, las imágenes tomadas en escenas abiertas resultan degradadas debido a la contaminación de la atmósfera por la presencia de polvo, gotas de agua, humo, y partículas de toda clase. Debido a la ocurrencia de los fenómenos de absorción y dispersión de la luz, estas partículas influyen negativamente en la capacidad de la imagen de reproducir correctamente los colores de la escena real, degradando además la visibilidad de los detalles, el nivel de contraste entre los distintos objetos y la luminosidad de la escena, de forma general. La reducción de la niebla (o dehazing, en la literatura en idioma inglés), es un proceso altamente deseado tanto en la fotografía comercial como en la orientada al análisis computacional. En una primera instancia, la supresión de la niebla tiene como resultado un incremento significativo de la visibilidad de la escena y permite corregir el desajuste de los colores causado por la luz dispersada y absorbida, por lo que la imagen tomada resulta más agradable a la vista. Una segunda ventaja viene dada debido a que la mayoría de los algoritmos de visión computacional usualmente asumen que en la imagen de entrada todos los datos corresponden a la radiación de la escena en cuestión, sin tener en cuenta los fenómenos de dispersión y absorción de la luz por la atmósfera, por lo que durante los procesos de detección de características, filtrado y análisis fotométrico inevitablemente se llegarán a resultados indeseados de bajo contraste de radiación. [HST09]. El problema de la reducción de la niebla en imágenes de exteriores es un tema de desarrollo reciente debido principalmente a la incertidumbre del origen de la niebla esparcida sobre la atmósfera. Hasta la fecha se han realizado algunas investigaciones sobre el tema y se han propuesto varios métodos; usando, algunos, [NN03] múltiples imágenes de una misma escena o información adicional, y otros, [Fat08] con base en suposiciones de algunas variables como la cantidad de radiación dispersada (albedo) y el nivel de correlación entre el sombreado producido.
(13) INTRODUCCIÓN. 10. por la poca iluminación y el producido por la poca reflectancia de los objetos. Otros métodos, [HST09] proponen la combinación de un modelo de imagen con niebla y un método digital de interpolación para la obtención de una imagen mejorada de alta calidad y libre de niebla. De forma general, no existen muchos métodos que le den solución al problema por la vía de realizar transformaciones de luminancia y contraste en la versión en escala de grises de la imagen en cuestión. Por esto es que en este trabajo se hace una búsqueda de una forma de procesamiento digital basada en la ecualización adaptativa de las características de la imagen que provea buenos resultados, o al menos alternativo con otros métodos existentes. Otras investigaciones anteriores ya proveen métodos de solución a este problema, aunque en ocasiones los resultados no son del todo convenientes en cuanto a tiempo de procesamiento de las imágenes, calidad de visualización de detalles, etc. En este documento se realiza un estudio comparativo entre uno de los métodos más usados en el tema, conocido como DCP, o Dark Channel Prior, [HST09] y uno de los métodos clásicos de mejoramiento de imágenes, el algoritmo CLAHE, o Contrast-limited Adaptive Histogram Equalization, [PAA87, Stark00, Pratt07, Math10, SB11 y Szel11] teniendo en cuenta distintas formas de aplicar dicho algoritmo sobre la imagen. Específicamente, la investigación llevada a cabo en este trabajo está enfocada en aplicaciones prácticas que puedan surgir en el Grupo de Automatización, Robótica y Percepción (GARP), perteneciente a la Universidad Central “Marta Abreu” de Las Villas, donde surge la necesidad de reducir la niebla presente en ocasiones en fotografías tomadas por vehículos aéreos no tripulados (VANT), también denominados como drones. Teniendo en cuenta la necesidad de la utilización de un método rápido y práctico que permita darle solución a este problema, se proponen para este trabajo los siguientes objetivos: Objetivo general: Encontrar un método sencillo, eficaz y práctico de restaurar imágenes de exteriores afectadas por la presencia de niebla utilizando para ello técnicas de transformación de la información de la luminancia..
(14) INTRODUCCIÓN. 11. Objetivos específicos: 1. Realizar una revisión bibliográfica sobre el tema, sistematizando la información obtenida y haciendo un análisis crítico de la misma. 2. Programar en MATLAB un algoritmo capaz de combinar distintos métodos de transformación de la luminancia para la obtención de una variedad de resultados. 3. Realizar una evaluación subjetiva donde se determine un estándar de preferencia por distintos observadores con experiencia en el campo del procesamiento digital de imágenes. 4. Realizar comparaciones con otro método existente para determinar los niveles de eficacia y aplicabilidad del nuevo método desarrollado. Este documento está organizado en tres capítulos. En el primer capítulo se exponen brevemente distintos temas relacionados con toda la labor posterior, así como información sobre otros métodos desarrollados en la actualidad, las causas físicas de la aparición del fenómeno de la niebla, una breve explicación de las funciones utilizadas de MatLab y aspectos relacionados con los tipos de evaluación subjetiva existentes. En el capítulo dos se describen completamente el método utilizado y los detalles sobre la evaluación subjetiva. En el capítulo tres se muestran los resultados a los que se llegó luego de la comparación con el método de canal oscuro o DCP..
(15) CAPÍTULO 1. FUNDAMENTOS TEÓRICOS. El problema de la reducción de la niebla en imágenes de exteriores es un tema actual sobre el cual no se tiene aún una respuesta definitiva. A pesar de que existen muchas formas de enfrentar el problema, no se ha encontrado un método que dé respuesta total al asunto, ya sea por su eficacia como por su eficiencia computacional. Mientras que unos métodos resultan efectivos en unas áreas, descuidan otras, de manera que en aplicaciones prácticas se hace necesario seleccionar una u otra solución. En este capítulo se describen brevemente algunos de los métodos existentes, además de los principales temas teóricos relacionados con todo el trabajo que posteriormente se verá en los capítulos dos y tres, haciendo énfasis solo en los puntos más importantes que más adelante se tratarán. El capítulo está estructurado en ocho epígrafes. En el epígrafe 1.1 se muestran los principales fenómenos físicos que intervienen en la aparición de la niebla en las imágenes tomadas en escenas de exteriores, mientras que en el epígrafe 1.2 se describen algunas ventajas del proceso de dehazing en forma general y posibles campos de utilización de los métodos de reducción de la niebla en las imágenes. La sección 1.3 trata los diversos métodos que se han implementado hasta la fecha para darle solución al problema. En la sección 1.4 se explican los fundamentos del trabajo con imágenes RGB. Los distintos espacios de colores utilizados en este trabajo se explican brevemente en la sección 1.5. En la sección 1.6 se abordan temas relacionados con la conversión a escala de grises, ya que este es uno de los pasos más importantes durante el procesamiento de la imagen, como se verá en el capítulo dos. El epígrafe 1.7 se dedica a la explicación de las funciones en MatLab que se utilizaron, mientras que el epígrafe 1.8 trata sobre los distintos tipos de evaluación subjetiva y los requerimientos que estas implican..
(16) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 1.1. 13. Fenómenos físicos relacionados con la obtención de imágenes en escenas con niebla. En casi todos los escenarios prácticos la luz reflejada desde una superficie es dispersada en la atmósfera antes de que llegue al lente de la cámara. Esto es debido a la presencia de aerosoles, como polvo, niebla y gases, que desvían la luz de su curso original de propagación. En la fotografía a larga distancia o en escenas con alta presencia de niebla, este proceso tiene un efecto substancial en la imagen, en donde el contraste se ve reducido y los colores en las superficies se ven borrosos y débiles. Este tipo de fotografía usualmente carece de viveza y ofrece una visibilidad muy pobre del contenido real de la escena. [Fat08] Según [HST09], la neblina, los gases y el humo son partículas que intervienen en la absorción y dispersión de la luz. La radiancia recibida por la cámara desde el punto de la escena en cuestión es atenuada a lo largo de la línea de vista. Según [GH14], la niebla es causada por partículas suspendidas o moléculas de agua en la atmósfera. La visibilidad de escena es degradada debido a una serie de reacciones y fenómenos, como la dispersión, absorción y refracción entre estas partículas o moléculas de agua y la luz de la atmósfera. En este proceso la luz, debiéndose propagar siguiendo una trayectoria recta, es dispersada y reemplazada por la luz previamente dispersada, llamada luz aérea (airlight). Esto resulta en una pérdida multiplicativa del contraste de la imagen, así como en un término aditivo debido a la uniformidad de la luz. [Fat08] Un modelo bien usado para representar este tipo de fenómeno fue desarrollado en 1924 por Koschmiedar. [Kosh24] Según sus investigaciones, una imagen perturbada por la niebla puede ser físicamente modelada por la siguiente ecuación, también conocida como la ley de Koschmiedar: 𝐸 𝑥, 𝑦 = 𝑒 !!". !,!. 𝑅 𝑥, 𝑦 + 1 − 𝑒 !!". !,!. 𝐿! = 𝛼 𝑥, 𝑦 𝑅 𝑥, 𝑦 + 1 − 𝛼 𝑥, 𝑦 𝐿!. (1.1). en la cual 𝐸 𝑥, 𝑦 representa la imagen con niebla observada, 𝛽 es un coeficiente de atenuación atmosférica, 𝐿! representa la luz atmosférica, 𝑑 𝑥, 𝑦 es la profundidad de la escena y 𝑅 𝑥, 𝑦 es la radiancia de la escena. El término 𝛼 𝑥, 𝑦 = 𝑒 !!". !,!. se relaciona con la profundidad de la. escena y se conoce como transmisión de la escena. El primer término del miembro derecho de la ecuación se conoce como atenuación directa, la cual disminuye exponencialmente la radiancia de.
(17) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 14. la escena en razón proporcional a la profundidad del campo. El segundo término es la ya mencionada luz aérea (airlight), que en la práctica se ve como una capa blanca que disminuye la visibilidad. [LC15] Además, debe notarse que los parámetros que influyen en la degradación dependen de las coordenadas 𝑥, 𝑦 , por lo que no influyen por igual en toda la imagen; esto es tienen un comportamiento local. 1.2. Importancia de la reducción de la niebla en imágenes de exteriores. El efecto perjudicial de la niebla puede ser un inconveniente para fotógrafos amateurs, comerciales y artísticos y puede afectar la calidad de las fotografías aéreas y subacuáticas. Este puede ser también el caso para fotografías satelitales, las cuales son usadas para muchos propósitos, incluyendo la cartografía, el mapeo web, la navegación aérea, la arqueología y estudios ambientales de cualquier tipo. [Fat08] Otros campos donde la presencia de niebla puede ser perjudicial son los sistemas de vigilancia en escenas abiertas y los sistemas de prevención de accidentes, en cámaras ubicadas dentro de vehículos inteligentes. [FF14] Las ventajas de la reducción de la niebla son bastante claras. Las imágenes sin niebla ni ruido son visualmente mucho más vívidas y tienen mejor apariencia. Además, las imágenes libres de niebla y ruido son más adecuadas para muchas aplicaciones importantes como la segmentación de imágenes, la extracción de características y la fusión de imágenes. [Fang14] Este trabajo se ha efectuado específicamente como parte de todo el proyecto que se está desarrollando en nuestra Universidad referente a la implementación de drones para uso agroindustrial. La obtención de imágenes desde alturas determinadas se ha visto acompañada en muchos casos con la presencia de niebla, por lo que se requiere su reducción. No obstante, este trabajo puede servir para otros fines, en dependencia de otras necesidades. 1.3. Trabajo previo y estado del arte. Según [GTC14], se pueden clasificar los métodos existentes de reducción de la niebla en dos grandes grupos o categorías: -. Métodos clásicos de mejoramiento de imagen basados en el procesamiento digital, y. -. Métodos de restauración de imágenes basados en la modelación física del fenómeno..
(18) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 15. Los métodos clásicos para el mejoramiento de imágenes son: ecualización de histogramas, filtros homomórficos, transformación de luminancia y contraste, etc. Los métodos de restauración de imágenes se enfocan en el proceso de degradación que sufren las imágenes por la presencia de la niebla. Para esto se basan en el establecimiento de un modelo de degradación, deduciendo así el proceso de degradación y compensando la distorsión durante dicha degradación con el fin de obtener la imagen original o una que se acerque lo mejor posible a ella; por tanto, no tienen en cuenta el carácter variable de la degradación en el tiempo y en el espacio. Debido a que el espesor de la niebla depende de la profundidad de la escena capturada, (la cual se desconoce, y por lo tanto se convierte en una incertidumbre), el problema de la reducción de la niebla continúa siendo un desafío actual. [Li16] Zeng [ZL15] opta por clasificar las investigaciones hasta la fecha en dos categorías, las que se basan en modelos y las que no lo hacen. Según Zeng, las aproximaciones más antiguas se enfocan en el mejoramiento del contraste y en la corrección de los colores sin tener en cuenta los procesos de degradación atmosférica, de manera que en ocasiones las imágenes procesadas pierden calidad y vienen acompañadas de algún tipo de distorsión impredecible. Existen varias formas de enfrentar el problema de la reducción de la niebla. Mientras que algunos métodos utilizan información del campo medida a partir de múltiples imágenes, otros prefieren suponer puntos de partidas y usar una simple imagen para el procesamiento, siendo estos últimos los que han alcanzado mayor auge. Métodos recientes [NN99, NN00, NN03 y otros] consisten básicamente en conseguir información adicional haciendo múltiples observaciones de la misma escena. La limitante de dichos métodos es la adquisición de datos, ya que la secuencia de imágenes no siempre está disponible en casos reales, y se hace difícil implementarlos en aplicaciones en tiempo real. Otros métodos [NNS01, NNS03 y SNS06] fueron propuestos para eliminar los efectos de la niebla a través de dos o más imágenes tomadas con diferentes grados de polarización, lo cual encarece el costo de adquisición. Otra opción es emplear información adicional consistente en mapas de profundidad o de transmisión óptica. [NaN03, HTA07, KNC08] A pesar de que estos métodos son más flexibles, el proceso de estimación de la transmisión óptica es dependiente de la escena y a veces se requiere la intervención humana..
(19) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 16. Una tercera aproximación está dirigida a recobrar la imagen usando para ello una simple imagen con niebla. Esta aproximación, que no requiere de fuentes externas, tiene una alta importancia en aplicaciones prácticas. En el trabajo de Fattal [Fat08] se asumió que la transmisión óptica y el apantallamiento de la superficie (surface shading) no están localmente correlacionados con la estimación de la luz reflejada de la escena (albedo) y la transmisión óptica. A pesar de que esta suposición es físicamente razonable y puede producir resultados impresionantes, es inválido manejar regiones muy cargadas de niebla donde diferentes componentes, a diferentes profundidades, son difíciles de resolver. [Li16] Fattal basó sus investigaciones considerando que tanto la radiancia de la escena como la profundidad son dos capas no correlacionadas. El trabajo desarrollado por Kratz y Nishino [KN09] impuso suposiciones estadísticas naturales tanto en la variable de profundidad como en la de luz reflejada (albedo), y dichas variables fueron estimadas juntamente a través de una formulación probabilística canónica. Sin embargo, sus resultados son propensos a mostrar una aureola acompañada de distorsión en los colores. [Li16] Al igual que Fattal, Kratz y Nishino consideraron independientes la radiancia de la escena y la profundidad. Otro método desarrollado por Tan [Tan08] opta por eliminar la niebla maximizando el contraste local de la imagen restaurada. Los resultados muestran mayor visibilidad, pero existe la tendencia a la sobre-saturación, y el resultado se vuelve físicamente inválido. [Li16] El trabajo de Tan se basa en la radiancia de la escena como punto de partida. [LC15] He y otros [HST09] propusieron en 2009 un método conocido como DCP para estimar la transmisión óptica basándose en la observación de que los píxeles libres de niebla generalmente contienen uno o más canales de colores RGB siendo negro o cercano al negro. El trabajo de He se basó principalmente en el análisis de la profundidad de la escena y la hipótesis del canal oscuro fue comprobada empíricamente en 5000 imágenes naturales. [LC15] Luego de que el método DCP fuera propuesto, la aproximación usando estudio previo (prior) creció rápidamente. Actualmente han sido propuestos muchos algoritmos de reducción de niebla basados en el ambiente de trabajo del método DCP, constituyendo un referente clásico. Las mejoras pueden ser principalmente clasificadas en dos aspectos. Primeramente, He [HST09] usó el método DCP para estimar un mapa de transmisión aproximado, y luego lo refinó usando.
(20) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 17. un método de refinamiento por capas, obteniendo un significativo mejoramiento de la calidad de la imagen, pero con el inconveniente de que consumía bastante tiempo. De esta manera aparecieron varios métodos que propusieron acelerar el refinamiento del mapa de transmisión, como el desarrollado por el propio He en 2010 [HST10] y el trabajo de Tarel y Hautière, [HT09 y KrN09] entre otros. Estos últimos optaron por un algoritmo rápido asumiendo que tanto la variación espacial como las transiciones de profundidad eran suaves, y usando un filtro de punto medio. El inconveniente de este método es que requiere de demasiados parámetros para su ajuste. Otros intentos por mejorar el método DCP fueron desarrollados por [WW10, XGL12 y JM12], aunque no lograron mejorar significativamente el método original. En segundo lugar, la imagen procesada por el método DCP puede sufrir pérdidas en los colores. Una de las razones es que la transmisión óptica es dependiente de la longitud de onda. Debido a la ley de Rayleigh, la dispersión es más intensa en la banda azul, lo cual hace que la imagen procesada tenga cierto tono azul. Gradualmente, el método de fusión de imágenes está siendo aceptado como una simple pero potente implementación para eliminar la niebla de las fotografías. Lex Schaul y otros [SFS09] utilizan imágenes con niebla y su versión en infrarrojo como dos entradas, realizando luego una fusión a nivel de píxel bajo el criterio de maximización del contraste. De esta manera el efecto de aureola desaparece y la pérdida de calidad de la imagen libre de la niebla es minimizada. Debido a que esta operación trabaja con la luminancia, es posible que ocurran distorsiones de color en aquellas regiones donde la luminancia cambia drásticamente. Los trabajos desarrollados por Ancuti y otros [AA11, AA13] obtienen las entradas luego de aplicar cierta ecualización y estiramiento de contraste a las imágenes original y degradada. Al completar el proceso de cómputo de los mapas de luminancia y cromaticidad normalizadas y luego de aplicar un método de contraste global Laplaciano, se obtiene un resultado llamativo usando técnicas de fusión multi-escala. Aun así, la mala influencia proveniente de la luz dispersada por la atmósfera no logra ser eliminada. 1.4. Trabajo con imágenes RGB. El propósito de un espacio de colores (también llamado modelo de colores o sistema de colores) es facilitar la especificación de colores en un estándar aceptado de forma general. [GW02] En esencia, un espacio de colores es una especificación de un sistema de coordenadas y un sub-.
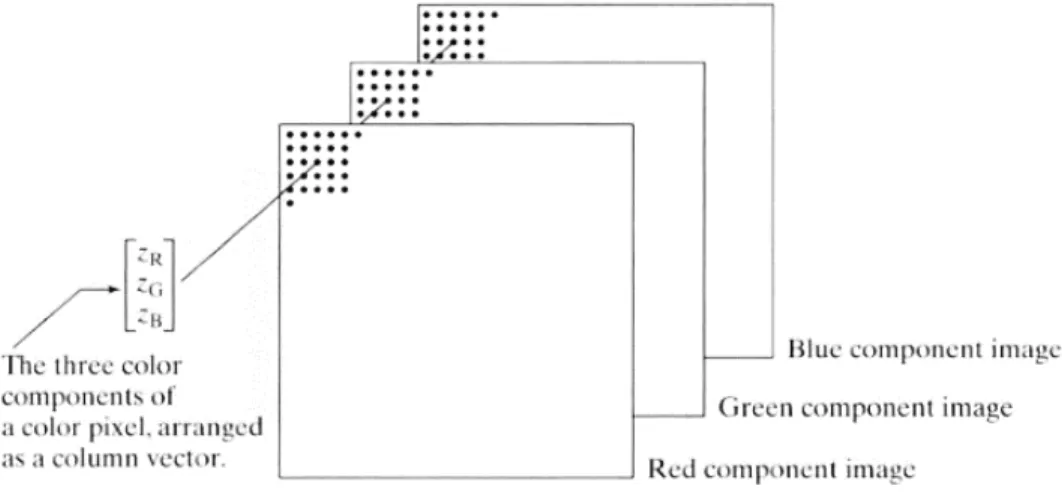
(21) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 18. espacio dentro de dicho sistema en el cual cada color puede ser representado por un simple punto. La mayoría de los modelos de colores usados en la actualidad están orientados a satisfacer dos necesidades principales: 1) que el modelo en cuestión sea compatible con un hardware determinado (por ejemplo, en monitores e impresoras) y 2) que el modelo sea fácil de usar en aplicaciones que tienen como objetivo la manipulación de los colores, por ejemplo, en la creación de gráficos de colores en la animación. En términos de procesamiento digital de imágenes, los modelos orientados a hardware más comúnmente usados en la práctica son, en orden, el modelo RGB (Red, Green, Blue) usado en los monitores y en un gran número de cámaras fotográficas y de video; los modelos CMY (Cyan, Magenta, Yellow) y CMYK (Cyan, Magenta, Yellow, Black), usados en las impresoras a color; y el modelo HSI (Hue, Saturation, Intensity), muy importante debido al estrecho vínculo que tiene en relación a la forma en que las personas interpretan los colores, y puede, por lo tanto, ser ampliamente usado en numerosas técnicas de conversión de color a escala de grises. El espacio de colores RGB es ampliamente usado para la transmisión, representación y almacenamiento de imágenes a color tanto en dispositivos analógicos (por ejemplo, en estudios de televisión) como en dispositivos digitales (computadoras, cámaras digitales y fotocopiadoras). Por esta razón, muchos programas para el tratamiento de gráficos y de procesamiento de imágenes usan el modelo RGB para su representación interna de las imágenes a color. Además, la mayoría de las librerías de lenguajes de programación, como las de Java, usan este espacio de colores como su estándar de representación de imágenes. [BB09] Es por esto que en este trabajo todas las imágenes que se procesaron fueron imágenes RGB, tanto las que se usaron como entrada para el procesamiento, como las que se obtuvieron como resultado para su visualización. Una imagen a color RGB puede ser vista como un arreglo de M x N x 3 píxeles, donde cada píxel es una tripleta correspondiente a los tres componentes primarios de colores: rojo, verde y azul (Fig. 1.1). Una imagen RGB puede ser vista como una pila, o superposición, de tres imágenes en escala de grises que, al alimentar las entradas roja, verde y azul de un monitor a color, producen una imagen a color en la pantalla. Estas tres imágenes suelen denominarse componente roja, verde y azul. En la herramienta computacional MatLab, cada imagen es una matriz de datos, o sea números, que pueden especificarse de diferentes clases. Por ejemplo, si la imagen RGB es de clase doble, entonces cada una de sus componentes serán imágenes en escala de grises (matrices.
(22) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 19. bidimensionales) con valores entre [0, 1]. De igual forma, si la imagen RGB se define de clase uint8 o uint16, las respectivas componentes R, G y B serán matices cuyos elementos serán valores entre [0, 255] y [0, 65535] respectivamente. [GWE09]. Fig. 1.1. Esquema de una imagen RGB. El número de bits usados para representar los valores de los píxeles de las imágenes componentes determina lo que se conoce como la profundidad de bit (bit depth) de una imagen RGB. Por ejemplo, si cada imagen componente es una imagen de 8 bits, la imagen RGB correspondiente es de 8 x 3 = 24 bits de profundidad. 1.5. Espacios de colores. Además del espacio de colores RGB, existen otros cuyo uso en algunas aplicaciones puede ser más conveniente o significativo que el RGB. Estos espacios son transformaciones del modelo RGB original e incluyen los espacios NTSC (YIQ), YCbCr, HSV, CMY, CMYK y HSI. [GWE09] Estos espacios tienen en común que son dependientes del dispositivo que se use. Esto significa, por ejemplo, que la apariencia de los colores RGB variará con las características de los monitores y escaneadoras que se usen y los colores CMYK serán ligeramente diferentes en distintas impresoras, con distintas tintas y en papeles de diferente textura. Debido a esto la CIE (Commission Internationale de l’Eclairage, una organización internacional fundada en 1931 en Viena, Austria, encargada de establecer todo tipo de recomendaciones y estándares en cuanto a la ciencia y el arte de la luz), ha establecido algunos espacios de colores independientes del dispositivo que se use. El primero de estos espacios, desarrollado en 1931, es el XYZ, a partir del.
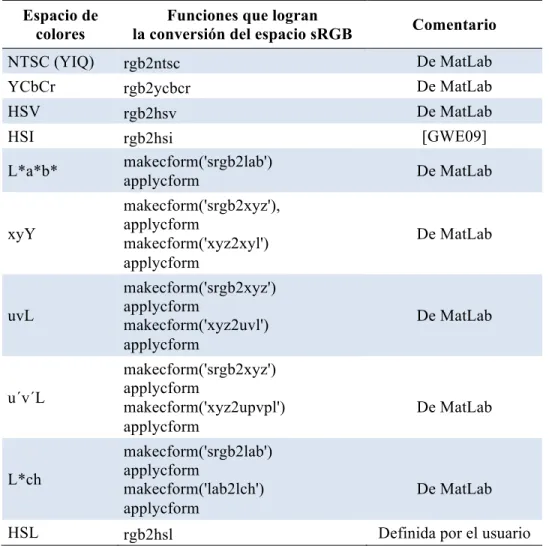
(23) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 20. cual se han derivado otros a lo largo de las décadas, con vistas a proveer otras representaciones alternativas de colores que son más prácticas para otros propósitos. En la realización de este trabajo se han usado diez espacios de colores diferentes, todos soportados por MatLab. Mientras que los primeros cuatro modelos de colores que se presentan en la Tabla 1.1 están enfocados en representar la información del color de las imágenes en formas más convenientes para los cálculos y el procesamiento digital de la imagen, además de ser espacios dependientes del dispositivo, los seis restantes forman parte de la familia de espacios independientes del dispositivo. Una característica general que todos estos espacios comparten es su capacidad de separar la información de la luminancia y la crominancia, es por eso que en ocasiones se les conoce como espacios de luminancia-crominancia. Es precisamente esta la razón por la cual se seleccionaron estos espacios y no otros, ya que el método desarrollado en este trabajo requiere exactamente esta posibilidad. Tabla 1.1. Espacios de colores usados en esta investigación. Espacio de colores. Descripción. NTSC (YIQ). Usado en televisión analógica.. YCbCr. Muy usado en video digital.. HSV. Compatible con el sistema visual humano.. HSI. Tiene una alta compatibilidad con el sistema visual humano.. L*a*b*. Usado en el diseño de impresoras, cámaras y fotocopiadoras.. xyY. Muy relacionado con el espacio XYZ original de 1931.. uvL. Intenta darle más uniformidad al plano de cromaticidad.. u´v´L. Se logra mejorar la uniformidad modificando u y v del uvL.. L*ch. Versión en coordenadas polares del espacio L*a*b*.. HSL. Versión mejorada del espacio HSI.. Las características usadas generalmente para distinguir un color de otro son la luminancia o intensidad del color (brightness o lightness según el espacio de color), el tono (hue), y la saturación (saturation). De esta manera un color cualquiera queda identificado únicamente por su componente de intensidad y su componente de cromaticidad (la combinación del tono y la saturación). [GWE09] Como se mencionó anteriormente, el modelo de colores RGB es dependiente del dispositivo, lo cual significa que no hay una única interpretación libre de ambigüedades para un conjunto dado.
(24) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 21. de valores pertenecientes a cada color (R, G y B). Sumado a esto, en la mayoría de las ocasiones los archivos de imagen no contienen información sobre las características del dispositivo usado en la captura de la imagen. Como resultado de esto, el mismo archivo de imagen en ocasiones se ve substancialmente diferente en diferentes sistemas. Para resolver este problema, las compañías Microsoft y Hewlett-Packard propusieron en los años ´90 un nuevo espacio de colores que sirviera como estándar y que fuera consistente con las características de los monitores típicos de tubo de rayos catódicos de las computadoras de la época. [SACM96] Este nuevo espacio, llamado sRGB (“s” de “standart”), es independiente del dispositivo que se use, por lo que permite que los valores de colores sRGB puedan ser realmente convertidos a otros espacios de colores independientes del dispositivo. El espacio sRGB se ha convertido en un estándar ampliamente aceptado en la industria de la computación, especialmente en dispositivos orientados al consumidor. En la actualidad las cámaras digitales, las escaneadoras, los monitores de computadoras, las impresoras y muchos otros dispositivos son normalmente diseñados para asumir que los valores RGB sean consistentes con el espacio de colores sRGB, a menos que el archivo de imagen contenga información detallada y específica del dispositivo con que se obtuvo la imagen. [GWE09] 1.6. Necesidad de conversión a escala de grises. Las imágenes digitales a color son producidas comúnmente como representaciones tridimensionales en el espacio de colores RGB, o en algún otro espacio, también tridimensional. Sin embargo, en numerosas aplicaciones, estas representaciones deben ser dimensionalmente reducidas. La reducción de la dimensión es usualmente hecha desde el espacio 3D RGB a algún espacio 2D (dicromático), o de una única dimensión, en escala de grises, en dependencia de la aplicación. [Oroz16] En el caso de este proyecto, se hace necesaria la conversión de una imagen RGB original a escala de grises, y esto, por diferentes métodos existentes. En total se probaron nueve variantes diferentes (ver Tabla 1.2), cada uno con sus ventajas y desventajas. [Oroz16].
(25) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 22. Tabla 1.2. Métodos de conversión a escala de grises usados en este trabajo. Método de conversión. 1.7. Descripción. rgb2gray [Math10]. Método NTSC (YIQ) usado por defecto por MatLab.. decolorize [GD07]. 2007. Algoritmo rápido. Posee parámetros ajustables.. C2Gcodesvd [SGS16]. 2016. Usa el espacio L*a*b* para separar componentes.. CPDecolor [LXJ14]. 2014. Combina restricciones locales y globales de contraste.. GcsDecolor [LL15]. 2015. Trabaja directamente en el espacio RGB.. Kim09 [KJD09]. 2009. Usa series de Fourier y el espacio L*a*b*.. RTCP [LXJ12]. 2012. Tiempo de ejecución constante en diferentes imágenes. Sar10 [Sar10]. 2010. Algoritmo sencillo, basado en la reducción de luminancia.. SPDecolor [LLW16]. 2016. Modelo polinomial multi-varianza de segundo orden.. Las funciones imadjust(), histeq() y adapthisteq() de MATLAB. MatLab posee tres funciones, entre otras, diseñadas para mejorar el contraste de las imágenes: imadjust(), histeq() y adapthisteq(). A continuación se explicará brevemente cada una de ellas. 1.7.1. La función imadjust(). La función imadjust() recibe como argumento una imagen en escala de grises y mapea los valores de intensidad de dicha imagen a otra, también en escala de grises, a la salida. La forma más completa del uso de dicha función es: 𝐽 = 𝑖𝑚𝑎𝑑𝑗𝑢𝑠𝑡 (𝐼, 𝑙𝑜𝑤!" ℎ𝑖𝑔ℎ!" , 𝑙𝑜𝑤!"# ℎ𝑖𝑔ℎ!"# , 𝑔𝑎𝑚𝑚𝑎). (1.2). donde se señala que los valores ubicados entre 𝑙𝑜𝑤!" ℎ𝑖𝑔ℎ!" se mapearán a los límites dados por 𝑙𝑜𝑤!"# ℎ𝑖𝑔ℎ!"# . El factor gamma por defecto es 1, y no es más que la potencia γ en la fórmula: 𝛬!"# = 𝛬!" ! donde 𝛬 representa la luminancia de las imágenes de entrada y de salida como muestra la Fig. 1.2. [Oroz16]. Fig. 1.2. Mapeo gamma de intensidad (no lineal)..
(26) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 23. Si el valor de gamma es menor que 1, el mapeo está ponderado hacia las salidas más altas (brillantes), y si es mayor que 1, el mapeo está ponderado hacia las salidas más bajas (oscuras). 1.7.2. La función histeq(). La función histeq() básicamente se encarga de mejorar el contraste usando para ello la ecualización del histograma de la imagen. El histograma de una imagen es una representación gráfica donde se puede observar el número de píxeles dentro de la imagen que tienen el mismo nivel de intensidad, de manera que da una idea del contraste y la claridad de la imagen. Por ejemplo, en la Fig. 1.3 se muestra cómo la mayor cantidad de píxeles de esta imagen se encuentra aproximadamente entre los valores 130 y 170. Como es de suponer, la abscisa de 0 a 255 representa toda la gama de posibles valores de intensidad (luminancia) que pueden tomar los píxeles de la imagen (0 corresponde al negro y 255 al blanco), mientras que la ordenada de 0 hasta cerca de 70000, representa la cantidad de píxeles que van tomando diferentes valores. La forma del histograma permite evidenciar ciertas particularidades de la imagen, como el tipo de fondo y el contraste, y en general en qué medida los niveles de gris están homogéneamente distribuidos por clases, denominadas modos.. Fig. 1.3. Histograma de una imagen.. El uso de la función histeq() suele tener el siguiente formato: 𝐽 = ℎ𝑖𝑠𝑡𝑒𝑞(𝐼, 𝑛 ), donde 𝐼 es la imagen en escala de grises original y 𝐽 la ecualizada. El valor discreto 𝑛 indica la cantidad de niveles de intensidad posibles para la imagen (en el ejemplo visto en la Fig. 1.3 se trata de una imagen de 8 bits, por lo tanto 𝑛 = 2! = 256 niveles de gris). El valor por defecto que otorga MatLab para 𝑛 es 64..
(27) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 1.7.3. 24. La función adapthisteq(). El histograma global de una imagen puede describir una distribución amplia o abierta, sin tener en cuenta los aspectos locales de la imagen, mientras que el histograma de regiones locales se encuentra fuertemente relacionado con un estrecho intervalo en la escala de niveles de grises. Usualmente en estos casos se desea mejorar el contraste de estas regiones locales solamente, ya que la ecualización global del histograma resulta inefectiva. [SB11] Estas operaciones es posible realizarlas usando métodos de ecualización adaptativa de histograma (AHE, Adaptive Histogram Equalization) o por métodos de mejoramiento adaptativo de contraste (ACE, Adaptive Contrast Enhancement). [ADA06] Según Stark [Stark00], los métodos de ecualización adaptativa de histograma a menudo mejoran demasiado la imagen en cuestión, creando los llamados “objetos de contraste”, que no son visibles en la imagen original. Una mayor comprensión de estos algoritmos puede encontrarse en los trabajos de Pizer y otros [PAA87], Szeliski. [Szel11], Pratt [Pratt07] y Solomon. [SB11] El término “adaptativo” implica que diferentes regiones de la imagen son procesadas distintamente, en dependencia de las propiedades locales de la región en cuestión. La función adapthisteq() de MatLab utiliza el algoritmo CLAHE (Contrast-limited Adaptive Histogram Equalization) para mejorar el contraste de una imagen. El algoritmo CLAHE opera en pequeñas regiones alrededor de cada píxel de la imagen llamadas ventanas, en vez de operar sobre toda la imagen, como hacen las funciones vistas anteriormente (imadjust e histeq). Las ventanas vecinas son entonces combinadas usando interpolación bilineal para eliminar las fronteras artificiales introducidas. El contraste, especialmente en áreas homogéneas, puede ser limitado para evitar la amplificación de cualquier ruido que pueda estar presente en la imagen. [Math10] La forma en que normalmente se usa la función adapthisteq() en MatLab es así: 𝐽 = 𝑎𝑑𝑎𝑝𝑡ℎ𝑖𝑠𝑡𝑒𝑞 ( 𝐼, 𝑝𝑎𝑟𝑎𝑚1, 𝑣𝑎𝑙1, 𝑝𝑎𝑟𝑎𝑚2, 𝑣𝑎𝑙2, … ). (1.3). donde los parámetros y valores que se pueden utilizar son los que se muestran en la Tabla 1.3..
(28) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 25. Tabla 1.3. Parámetros y valores de la función adapthisteq() de MatLab. Parámetro. Valor. ‘NumTiles’. Vector de dos elementos (enteros positivos) especificando el tamaño de las ventanas [M N] a usar. El valor mínimo es [2 2]. El valor por defecto es [8 8].. ‘ClipLimit’. Escalar real en el rango [0 1] que especifica un límite de mejoramiento de contraste. Valores mayores implican mayor contraste. El valor por defecto de MatLab es 0.01.. ‘Nbins’. Escalar entero positivo que especifica el número de barras verticales del histograma usado en la transformación de contraste. Valores más altos implican mayor rango dinámico a costo de menor velocidad de procesamiento. El valor por defecto es 256.. Cadena de caracteres especificando la forma de histograma deseada para las ventanas de la imagen. ‘Distribution’ ‘uniform’ – Histograma plano (usada por defecto). ‘rayleigh’ – Histograma con forma de campana. ‘exponential’ – Histograma curvo. ‘Alpha’. 1.8. Escalar real no negativo que especifica un parámetro de distribución. El valor por defecto es 0.4. Parámetro solo válido para distribuciones ‘rayleigh’ o ‘exponential’.. Evaluación de la calidad de las imágenes. Cuando se desarrolla un nuevo método o algoritmo para un determinado fin es necesario a menudo comparar los resultados con otros obtenidos con métodos anteriores. La mayoría de las publicaciones realizan comparaciones basándose en algún tipo de validación informal, usando ejemplos y analizando cuidadosamente las semejanzas y diferencias entre los resultados propios y los ajenos. Este puede ser un método efectivo, pero solo cuando las diferencias son incuestionables. Si las diferencias son bien pequeñas y sutiles, entonces dichas comparaciones pueden ser discutidas. [MTM12] Los métodos de evaluación de calidad de imágenes se originaron a partir de un gran conjunto de métodos psicométricos que fueron desarrollados para medir características psicológicas. [Tor85] El interés en la evaluación de la calidad de imágenes y videos ha estado enfocado principalmente en aplicaciones de transmisión y compresión de video, surgiendo así algunas recomendaciones para el diseño de experimentos de evaluación de la calidad. [ITU02, Kee03, ITU08, Kras17] Han sido relativamente pocos los trabajos publicados dedicados a métodos de evaluación de la calidad de imágenes por comparación subjetiva. La evaluación de la calidad es mucho más fácil usando algoritmos computacionales sin la necesidad de experimentos subjetivos. Un gran.
(29) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 26. número de métodos de este tipo, conocidos como algoritmos de evaluación objetiva, han sido propuestos a lo largo de los años. [WB06, PH11] Las predicciones de estos métodos se pueden correlacionar muy bien con los experimentos subjetivos si se tienen en cuenta un conjunto limitado de distorsiones o diferencias, [SSB06] pero su precisión disminuye al aumentar la variedad de distorsiones. [PLZ09] Según [RFN11], a pesar de las ventajas de las evaluaciones objetivas, son las evaluaciones subjetivas las que constituyen la medida de calidad definitiva, pues son los usuarios humanos los que al fin y al cabo evalúan los sistemas de multimedia, y a pesar de los muchos esfuerzos en el diseño de medidas objetivas precisas, hasta la fecha no se ha encontrado una que tenga en cuenta todas las peculiaridades de las respuestas psicológicas y fisiológicas humanas, y es por esto que las pruebas subjetivas son generalmente reconocidas como los métodos más confiables en el asesoramiento de la calidad de las imágenes. [Kras17] En este sentido, Mantiuk y otros [MTM12] hacen un estudio de cuatro métodos usados con frecuencia llamados: “Estímulo Simple”, “Estímulo Doble”, “Decisión Forzada” y “Juicios Similares”, aplicables en imágenes que fueron degradadas por algún proceso y luego recuperadas, esto es, en imágenes distorsionadas, contando siempre con la versión original. Los métodos de estímulos simple y doble consisten en elegir un criterio de la calidad de la imagen en una escala de cinco posibles niveles de calidad. Ambos métodos se utilizan mayormente en la evaluación de la calidad de video. [ITU02, ITU08]. Fig. 1.4. (a) Método de estímulo simple; (b) Método de estímulo doble (Tomadas de [MTM12]).. El método categórico de estímulo simple consiste en la presentación de una imagen por un tiempo corto y fijado, como se muestra en la Fig. 1.4 (a). Las imágenes se presentan.
(30) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 27. aleatoriamente e incluyen la imagen de referencia. Además, no existe límite de tiempo para que el usuario tome la decisión en la votación. De esta manera, para n condiciones o modificaciones de la misma imagen, se requieren solo n + 1 presentaciones (una presentación adicional para la imagen de referencia). Por otra parte, el método de estímulo doble es similar al anterior, con la diferencia de que en cada presentación se muestran dos imágenes, una de ellas es la imagen de referencia, mientras que la otra no es más que la imagen modificada. Este método requiere n presentaciones para n condiciones. [MTM12] El tercer método subjetivo de comparación de calidad de imágenes mencionado anteriormente es el conocido como el de decisión forzada y consiste en la presentación a los observadores de dos imágenes a la vez, ninguna de ellas la original, obligando al usuario que elija una de las dos de acuerdo a su criterio de mejor calidad. Como es de esperar, este segundo método es incluso más preciso que el primero, pero requiere mayor cantidad de presentaciones: para n imágenes diferentes se tienen un total de 𝐶. ! !. !!. = !! !!! ! =. ! !!! !. presentaciones, en el caso de tener n. imágenes tomadas de dos en dos. Es posible usar algoritmos que reduzcan significativamente el número de presentaciones en este tipo de evaluaciones [SF01]. Otros algoritmos, como el conocido Quicksort (inventado por el científico británico C. A. R. Hoare en 1960), pueden reducir el número de comparaciones a aproximadamente 𝑛 log 𝑛, lo cual es significativamente menor que la comparación normal descrita anteriormente, especialmente cuando el número de imágenes a comparar aumenta. Según [Rech12], el método de decisión forzada resulta más eficaz en la diferenciación de la fortaleza relativa de los llamados “refuerzos”, que son otras evaluaciones previas o posteriores que, al compararlas con la evaluación en cuestión, permiten comprobar el nivel de confiabilidad de las mismas.. Fig. 1.4. (c) Método de decisión forzada; (d) Método de juicios similares (Tomadas de [MTM12])..
(31) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 28. Mientras que el método de decisión forzada ordena las imágenes de acuerdo a su calidad, no tiene en cuenta cuán diferentes son las imágenes. En el método de juicios similares los observadores no solo eligen su preferencia, sino que además indican cuán diferentes son las imágenes en una escala continua, como se muestra en la Fig. 1.4 (d). Los observadores pueden decidir dejar el marcador en la posición 0 si no ven ninguna diferencia. Los algoritmos de ordenamiento rápido también pueden ser utilizados en este método. Según [Tho12 y KQ16], los métodos de evaluación subjetiva de la calidad, tanto de imágenes como de audiovisuales, se pueden clasificar teniendo en cuenta dos aspectos: la forma en que son presentados los estímulos de prueba, esto es, estímulo simple, estímulo doble y multi-estímulo, y la forma en que se realizan las votaciones: votaciones categóricas absolutas o a través de una escala continua denotando la calidad de las imágenes. Según estas observaciones, se puede comprobar que los cuatro métodos mencionados por Mantiuk [MTM12] se pueden clasificar como de estímulos simple y doble, según el caso. En cuanto a los métodos multi-estímulo, existen dos casos: las evaluaciones con y sin reemplazo. [Rech12] Las evaluaciones subjetivas multi-estímulo con reemplazo son aquellas en las que se compara directamente un conjunto de imágenes dispuestas aleatoriamente en una línea, indicándole a los observadores que ordenen las imágenes en el sentido de mejor calidad en su opinión. En el caso de las evaluaciones sin reemplazo, los observadores seleccionan una imagen bajo el criterio de calidad y automáticamente dicha imagen es quitada de conjunto, de manera que se establece un nivel de preferencia. Algunos estudios y variaciones de estos métodos pueden consultarse en las investigaciones desarrolladas por [DFC01, CGA06, HH08, RN08, WD08, RFN11, Rech12, Tho12 y KQ16]. Las ventajas de las evaluaciones multi-estímulo [Rech12] son su corta duración, en comparación con los métodos de simple y doble estímulos, y la habilidad para comparar un conjunto de imágenes que puede ser “reforzado” a la vez, esto es, la capacidad de comprobar rápidamente la fidelidad de las decisiones de los votantes, comparando las votaciones previas y siguientes y comprobando la constancia y regularidad de las decisiones, lo cual mejora su confiabilidad. Según [Rech12], las pruebas subjetivas multi-estímulo sin reemplazo son más convenientes cuando se quiere comprobar un grupo amplio o relativamente grande de “refuerzos”, es decir, cuando se cuenta con un conjunto numeroso de evaluaciones del mismo tipo, por ejemplo, en el.
(32) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 29. caso de que se cuente con un número relativamente elevado de observadores encuestados, aunque no con los requisitos óptimos para la prueba (low-functioning individuals), según sus exigencias. Por otro lado, las evaluaciones subjetivas multi-estímulo con reemplazo son más efectivas cuando se quiere identificar un conjunto reducido de “refuerzos de alta potencia”, es decir, cuando se tiene, por ejemplo, en grupo pequeño de observadores suficientemente calificados (high-functioning individuals), en los cuales, obviamente, se puede depositar mayor confianza incluso antes de iniciada la evaluación. La principal desventaja de estos métodos consiste [Rech12] en que, a diferencia de los métodos de estímulos simple y doble, resulta más difícil determinar un porcentaje de selección o un criterio sólido en cuanto a qué opciones resultan preferidas o mejores y qué opciones pueden desecharse definitivamente. En sustitución de estas decisiones, usualmente en estos métodos resulta más fácil establecer un nivel de preferencia por rangos o niveles, comparando y ordenando las diferentes opciones entre sí. Según Chandler, [Chan13] la mayoría de los algoritmos de evaluación de la calidad de las imágenes que han sido diseñados hasta la fecha están orientados a la manipulación de imágenes degradadas, como los citados por Mantiuk [MTM12], operando frecuentemente bajo la suposición de que una imagen de alta calidad es aquella más visualmente parecida a la imagen original o de referencia, cuya calidad se desea alcanzar. Sin embargo este criterio de similitud es menos aplicable en imágenes mejoradas ya que las versiones mejoradas suelen tener mejor calidad que la imagen original (siempre que no se sobre-mejoren, apareciendo en ocasiones artificiales y poco estéticas). Otra distinción entre las evaluaciones subjetivas de este tipo de algoritmos y aquellos que tratan con imágenes degradadas está en la dificultad a la hora de detectar diferencias entre las versiones mejoradas. Es común que en las imágenes mejoradas los cambios resulten bien sutiles y difíciles de detectar, mientras que en los otros casos, las diferencias resultan más evidentes, por cuanto las comparaciones se realizan contando con la imagen de mayor calidad, la original. Según [Chan13], uno de los problemas sin solución definitiva en estos casos es afectación en la impresión artística de la imagen. De forma general, existe el acuerdo de que son las evaluaciones subjetivas la forma más confiable de evaluar la calidad de las imágenes, [Kras17] aunque también es fácil perder el enfoque inicial que se quiere desarrollar cuando no son cuidadosamente preparadas, conducidas e interpretadas. Otra característica de estas pruebas es que son significativamente dependientes del diseño que se quiera implementar, de acuerdo al problema específico que se esté enfrentando..
(33) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 30. Básicamente, en la realización de una evaluación subjetiva intervienen factores que es necesario especificar, por ejemplo, las características de los observadores (cantidad, edad, tiempo de experiencia en la evaluación de imágenes, características de visión, cantidad de repeticiones a cada observador, etc.); características del monitor usado (modelo, resolución usada, tamaño, tipo de monitor, intensidad usada, fondo utilizado, etc.); tipo de distorsiones o modificaciones hechas a las imágenes (por ejemplo, a partir de la imagen original se obtuvieron tres versiones: una a través de una compresión al formato estándar JPEG 2000, otra a través de un cambio del espacio de colores de la imagen por un procesamiento digital y otra por un mejoramiento adaptativo de contraste); diseño del experimento (Usualmente se le indica previamente a los observadores las características sobre las cuales deben prestar mayor atención, a veces se usa una sesión de entrenamiento previo para que puedan familiarizarse. También se suele fijar el tiempo de respuesta, con el fin de evitar la fatiga, etc.); procesamiento de los datos obtenidos (luego de realizada la sesión de evaluación subjetiva se suelen procesar los datos estadísticamente para determinar cuán confiable fue la evaluación, qué grado de acercamiento tuvieron los datos obtenidos con los datos esperados, etc.) y otros factores como la iluminación del lugar donde se realiza el experimento, la comodidad de los observadores, la distancia óptima entre el monitor y cada observador (no suele ser la misma en todos los casos), y el efecto de aprendizaje (relacionado con la capacidad individual de cada observador de memorizar subconscientemente diversos aspectos durante el experimento que entorpecen la fidelidad de las decisiones). La evaluación subjetiva desarrollada en esta investigación no pretende ser rigurosa, por lo que puede ser mejorada en muchas de estas consideraciones en posibles futuros trabajos similares. Como ya se mencionó, otras metodologías y procedimientos para la realización de este tipo de pruebas puede consultarse en documentos como [ITU02, ITU08, Kras17 y VPB12]. 1.9. Pruebas no paramétricas para el análisis de datos estadísticos. En estadística, generalmente se suelen usar diferentes procedimientos y métodos en dependencia del tipo de datos que se desea procesar. En algunos casos, esos datos suelen ser valores numéricos sin tratamiento de ningún tipo ni refinamiento (raw data), usándose en este caso pruebas estadísticas bastante conocidas, como la Prueba de Student (o t-Test), la cual permite comparar dos valores medios correspondientes a dos espacios muestrales independientes uno del otro. [EW07].
(34) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 31. En otros casos, cuando los datos que se tienen no siguen determinada distribución probabilística o no se conoce el valor exacto de los datos pero sí el ordenamiento de los mismos, se suelen emplear los llamados procedimientos no paramétricos. La estadística no paramétrica es la rama de la estadística que estudia las pruebas y modelos estadísticos cuya distribución no se ajusta a los criterios paramétricos sino que está determinada por la observación de los datos en cuestión. Generalmente en estos casos se hace recomendable el uso de pruebas no paramétricas como la Prueba de Correlación de Rangos de Spearman, la Prueba de Kolmogórov-Smirnov, la Prueba de Kruskal-Wallis, la Prueba de Mann-Whitney, la Prueba de Siegel-Tukey, la Prueba de WaldWolfowitz, entre otras. Para una explicación detallada de estas y otras pruebas estadísticas se recomienda la revisión de trabajos como [SC88, Gib93, Con98, LD98 y EW07]. A continuación se comentan las que serán utilizadas en este trabajo. 1.9.1. Prueba de Mann-Whitney. La Prueba de Mann-Whitney, en ocasiones conocida como Prueba U de Mann-Whitney, es la más conocida de las pruebas no paramétricas para dos muestras independientes (análisis pareado). Básicamente, consiste en contrastar si dos poblaciones muestreadas son equivalentes en su posición, combinando y clasificando las observaciones de ambos grupos. Fue propuesta inicialmente en 1945 por Frank Wilcoxon (1892–1965), químico y estadístico estadounidense, para muestras de igual tamaño, y luego en 1947 fue extendida a muestras de tamaño arbitrario por Henry B. Mann y D. R. Whitney. Según [EW07], la prueba de Mann-Whitney es similar a la Prueba de Student para dos muestras [Post78] pero sin las suposiciones de normalidad de las muestras o de igualdad de varianza entre ambas, aunque sí requiere que sean independientes. El procedimiento de Mann-Whitney está diseñado específicamente para comprobar cuándo las observaciones en una población tienden a tener valores más altos que las de la otra población. Normalmente, las hipótesis que se prueban con este procedimiento son las siguientes: H0: Denominada "hipótesis nula". Significa que los dos grupos no tienen diferencias significativas. Ha: Denominada "hipótesis alternativa". Significa que los dos grupos tienen diferencias..
(35) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 32. En estadística usualmente se calcula el parámetro conocido como valor p (p-value, en idioma inglés) cuya finalidad es dar una medida de cuándo, a partir de los datos analizados, es más apropiado rechazar la hipótesis nula (H0 en este caso). El valor p es una probabilidad, por lo que su valor está acotado entre los límites 0 y 1 y, según se define en [EW07], es la probabilidad de obtener resultados tan extremos o incluso más extremos que aquellos resultados que afirman que la hipótesis nula es cierta. En otras palabras, mientras más pequeño sea el valor p, más evidencia habrá para rechazar la hipótesis nula. El valor p está estrechamente asociado con el criterio de toma de decisiones α, también conocido como nivel de significancia. Usualmente en las pruebas estadísticas se suele fijar 𝛼 = 0.05, lo que significa que el 5 % del tiempo se cometerá el error de rechazar H0 cuando en realidad es una proposición verdadera (Error de tipo I en las Pruebas de Hipótesis, como indica la literatura sobre el tema), o una vez de cada 20 intentos. El método de Mann-Whitney calcula el parámetro estadístico U, en dependencia del cual se determina el valor p, que da una indicación de cuán seguro es rechazar o no rechazar la hipótesis nula. En 2016, la Asociación Estadística Americana (American Statistical Association) publicó [WL16] seis principios para el correcto uso e interpretación del valor p, como se muestran a continuación: 1. Los valores p pueden indicar cómo son los datos de incompatibles con cierto modelo estadístico. 2. Los valores p no miden la probabilidad de que la hipótesis nula sea cierta, ni tampoco la probabilidad de que los datos hayan sido producidos enteramente al azar. 3. Conclusiones científicas y decisiones políticas o empresariales no deberían basarse únicamente en el hecho de que un valor p supere un umbral especificado. 4. Una inferencia apropiada implica un informe completo y transparencia. 5. Ni el valor p ni la significación estadística miden el tamaño de un efecto o la importancia de un resultado. 6. En sí mismo, un valor p no es una medida apropiada de la evidencia de un modelo o hipótesis..
(36) CAPÍTULO 1: FUNDAMENTOS TEÓRICOS. 1.9.2. 33. Prueba de Kolmogórov-Smirnov. La Prueba de Kolmogórov-Smirnov para dos muestras, también conocida como Prueba Z de Kolmogórov-Smirnov o Prueba K-S, está diseñada para detectar las diferencias entre las posiciones y las formas de dos distribuciones de muestras (análisis pareado). Más específicamente, según la definición aportada en [Schay07], se encarga de probar si dos muestras aleatorias independientes y de diferentes tamaños pertenecen a la misma distribución o no, de manera que ambas hipótesis: nula y alternativa (H0 y Ha), son las mismas que para la Prueba de Mann-Whitney. La Prueba de Kolmogórov-Smirnov fue desarrollada por A. N. Kolmogórov y N. V. Smirnov durante los años de 1930, y se basa en la diferencia máxima absoluta entre las funciones de distribución acumulada observadas para ambas muestras. Cuando esta diferencia es significativamente grande, se consideran diferentes las dos distribuciones. Para una mayor explicación sobre la forma en que se calculan el valor estadístico Z y el nivel de significancia α (y junto con este el valor p), se recomienda la consulta de otras fuentes como [Schay07]. 1.9.3. Prueba de Kruskal-Wallis. La Prueba de Kruskal-Wallis, también conocida como Prueba H de Kruskal-Wallis, es una extensión de la prueba U de Mann-Whitney para más de dos grupos de muestras independientes y es el análogo no paramétrico del Análisis de Varianza de un Factor (One-Way ANOVA, ANalysis Of VAriance), pero sin las suposiciones de normalidad o igualdad de varianza de los datos. Además, en el caso de la prueba de Kruskal-Wallis, al igual que en cualquier otro método estadístico no paramétrico, no se procesan los datos directamente, sino los rangos o categorías en los que entran los datos. [EW07] Las hipótesis que se prueban con el método de Kruskal-Wallis normalmente son análogas a las de la prueba de Mann-Whitney pero para varios grupos: H0: No existen diferencias en las distribuciones de los grupos. Ha: Existen diferencias en las distribuciones de los grupos. La Prueba de Kruskal-Wallis fue propuesta por William Kruskal y W. Allen Wallis, y se basa en ! el cálculo del valor estadístico H para luego estimar el valor p como 𝑝 = 1 − 𝑃𝑟 𝜒!!! ≤ 𝐻.
Figure


+7





Documento similar
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
d) que haya «identidad de órgano» (con identidad de Sala y Sección); e) que haya alteridad, es decir, que las sentencias aportadas sean de persona distinta a la recurrente, e) que
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
Las probabilidades de éxito de este procedimiento serán distintas en función de la concreta actuación del reclamante antes de que se produjera la declaración de incons-.. En caso
En la parte central de la línea, entre los planes de gobierno o dirección política, en el extremo izquierdo, y los planes reguladores del uso del suelo (urbanísticos y
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
Para recibir todos los números de referencia en un solo correo electrónico, es necesario que las solicitudes estén cumplimentadas y sean todos los datos válidos, incluido el
