Diseño y construcción de un tablero electrónico digital basado en la normativa vigente de la fórmula SAE para contribuir con la construcción de un vehículo de competencia para la ESPOCH
100
0
0
Texto completo
(2) ESPOCH Facultad de Mecánica. APROBACIÓN DEL TRABAJO DE TITULACIÓN 2016-05-05 Yo recomiendo que el Trabajo de Titulación preparado por: JINEZ MONTESDEOCA FERNANDO DANIEL PILAMUNGA PILAMUNGA CRISTIAN DANIEL Titulada: “DISEÑO Y CONSTRUCCIÓN DE UN TABLERO ELECTRÓNICO-DIGITAL BASADO EN LA NORMATIVA VIGENTE DE LA FÓRMULA SAE PARA CONTRIBUIR. CON. LA. CONSTRUCCIÓN. DE. UN. VEHÍCULO. DE. COMPETENCIA PARA LA ESPOCH”. Sea aceptado como parcial complementación de los requerimientos para el Título de:. INGENIERO AUTOMOTRIZ. Ing. Carlos Santillán Mariño DECANO DE LA FAC. DE MECÁNICA. Nosotros coincidimos con esta recomendación:. Ing. Javier Villagrán DIRECTOR. Ing. Celin Padilla ASESOR.
(3) ESPOCH Facultad de Mecánica. EXAMINACIÓN DEL TRABAJO DE TITULACIÓN NOMBRE DEL ESTUDIANTE: JINEZ MONTESDEOCA FERNANDO DANIEL TRABAJO DE TITULACIÓN: “DISEÑO Y CONSTRUCCIÓN DE UN TABLERO ELECTRÓNICO-DIGITAL. BASADO EN LA NORMATIVA. VIGENTE. PARA. DE. LA FÓRMULA. SAE. CONTRIBUIR. CON. LA. CONSTRUCCIÓN DE UN VEHÍCULO DE COMPETENCIA PARA LA ESPOCH” Fecha de Examinación: 2016-12-12 RESULTADO DE LA EXAMINACIÓN: COMITÉ DE EXAMINACIÓN. APRUEBA. NO APRUEBA. FIRMA. Ing. José Pérez PRESIDENTE TRIB. DEFENSA Ing. Javier Villagrán DIRECTOR Ing. Celin Padilla ASESOR * Más que un voto de no aprobación es razón suficiente para la falla total.. RECOMENDACIONES:. El Presidente del Tribunal certifica que las condiciones de la defensa se han cumplido.. Ing. José Pérez PRESIDENTE DEL TRIBUNAL.
(4) ESPOCH Facultad de Mecánica. EXAMINACIÓN DEL TRABAJO DE TITULACIÓN NOMBRE DEL ESTUDIANTE: PILAMUNGA PILAMUNGA CRISTIAN DANIEL TRABAJO DE TITULACIÓN: “DISEÑO Y CONSTRUCCIÓN DE UN TABLERO ELECTRÓNICO-DIGITAL. BASADO EN LA NORMATIVA. VIGENTE. PARA. DE. LA FÓRMULA. SAE. CONTRIBUIR. CON. LA. CONSTRUCCIÓN DE UN VEHÍCULO DE COMPETENCIA PARA LA ESPOCH” Fecha de Examinación: 2016-12-12 RESULTADO DE LA EXAMINACIÓN: COMITÉ DE EXAMINACIÓN. APRUEBA. NO APRUEBA. FIRMA. Ing. José Pérez PRESIDENTE TRIB. DEFENSA Ing. Javier Villagrán DIRECTOR Ing. Celin Padilla ASESOR * Más que un voto de no aprobación es razón suficiente para la falla total.. RECOMENDACIONES:. El Presidente del Tribunal certifica que las condiciones de la defensa se han cumplido.. Ing. José Pérez PRESIDENTE DEL TRIBUNAL.
(5) DERECHOS DE AUTORÍA El trabajo de grado que presentamos, es original y basado en el proceso de investigación y/o adaptación tecnológica establecido en la Escuela de Automotriz Facultad de Mecánica de la Escuela Superior Politécnica de Chimborazo. En tal virtud, los fundamentos teóricos-científicos y los resultados son de exclusiva responsabilidad de los autores. El patrimonio intelectual le pertenece a la Escuela Superior Politécnica de Chimborazo.. Fernando Daniel Jínez Montesdeoca. Cristian Daniel Pilamunga Pilamunga.
(6) DEDICATORIA El presente trabajo de titulación la dedico con amor y cariño primeramente a Dios por estar conmigo en cada paso que doy, cuidándome, guiándome por el buen camino, dándome la fortaleza para seguir adelante sin desmayar en ningún momento y así poder superar todos los obstáculos que se presentan en la vida. Evidentemente la dedico a mis padres Edgar Jínez y Martha Montesdeoca quienes son pilares fundamentales en mi vida por darme su amor, saber corregirme cuando era necesario, por esos abrazos de consuelo cuando estaba triste y por celebrar conmigo mis triunfos, por el esfuerzo que hacen cada día para que no me falte nada, por eso les digo muchas gracias amados padres por ser un excelente ejemplo de sacrificio y esfuerzo para mí. A mis queridos hermanos Francisco y Bryan Jínez Montesdeoca por brindarme su compañía y cariño y sobre todo su apoyo incondicional. A quienes les deseo el mejor de los éxitos en sus estudios y en el campo laboral. Fernando Daniel Jínez Montesdeoca El presente trabajo de titulación se la dedico principalmente a Dios, por la fuerza y sabiduría que me ha brindado en el transcurso de mi vida sin dejar que desmaye por las adversidades que se me han presentado. A mis padres, Carlos Pilamunga e Hilda Pilamunga, los cuales has sido un pilar fundamental en la formación personal y académica en el transcurso de mi vida, ayudándome con sus consejos para tomar las mejores decisiones y así crecer de una manera digna y honorable. A mis hermanas, Silvia, Mónica y Lorena Pilamunga las cuales han sido mi gran compañía, y ayuda para ir construyendo esta gran meta. Además quiero dedicar a toda mi familia en especial a mis abuelitos Carlos Pilamunga y Juana Pilamunga por su cariño y cuidado por estar en los buenos y malos momentos de mi vida. Cristian Daniel Pilamunga P..
(7) AGRADECIMIENTO Agradezco primeramente a Dios por darme la vida y estar siempre a mi lado en cada paso que doy y dándome la fortaleza para lograr alcanzar mis metas trazadas en la vida. Agradezco de una manera muy especial a mis padres por su inmenso apoyo y comprensión demostrados en todo momento, sacrificando gran parte de su vida para formarme y educarme y así convertirme en una persona de bien. Por los esfuerzos realizados para que yo lograra culminar satisfactoriamente mi carrera profesional siendo para mi esta la mejor herencia. A mis hermanos que con su comprensión y cariño, estuvieron siempre conmigo en los momentos más difíciles de mi formación académica, cuando necesité fuerzas y ánimo para poder afrontar los obstáculos y continuar con mis estudios. Por eso les brindo mi gratitud de todo corazón por su apoyo incondicional. Agradezco también a mis abuelitos, tíos y amigos todos ellos quienes me apoyaron siempre y estuvieron conmigo en este gran sueño. Por último pero no menos importante mi más sincero agradecimiento a la Escuela Superior Politécnica de Chimborazo, en especial a la Escuela de Ingeniería Automotriz, por brindarme la oportunidad de obtener una profesión con la cual podré contribuir y ser productivo a la sociedad. Fernando Daniel Jínez Montesdeoca Primeramente agradezco a Dios, por brindarme la salud y darme el coraje para seguir alcanzando metas propuestas en el transcurso de mi vida.También agradezco de manera muy especial a mis padres los cuales han sido un ejemplo a seguir, demostrando su amor y cariño en los momentos que más lo he necesitado. De la misma manera agradezco a toda mi familia en especial a mi tío Fausto Pilamunga y a novia Alexandra Jinde que me ha sabido brindar su apoyo para salir adelante y no desmayar en el camino para conseguir esta meta. Por ultimo pero no menos importante quiero extender mis agradecimientos a las autoridades de la ESPOCH que de una u otra manera supieron ayudarnos para culminar satisfactoriamente nuestro trabajo de titulación. De todo corazón muchas gracias. Cristian Daniel Pilamunga P..
(8) CONTENIDO Pág.. 1. 1.1 1.2 1.3 1.4. INTRODUCCIÓN Generalidades ..................................................................................................... 1 Antecedentes ...................................................................................................... 1 Justificación........................................................................................................ 1 Objetivos ............................................................................................................ 2. 2. 2.1 2.2. MARCO TEÓRICO Formula SAE ...................................................................................................... 4 Cuadro de instrumentos...................................................................................... 5. 2.3. Cableado eléctrico . ............................................................................................ 6. 2.4. Panel de instrumento digital. .............................................................................. 9. 2.5. Sensores............................................................................................................ 11. 2.6. Pantalla TFT de 7,0” HMI Nextion NX8048K070 .......................................... 16. 2.7. Microcontroladores AVR MEGA de ATMEL ................................................ 19. 2.8 2.9. Software de programación Bascom AVR ........................................................ 21 Software de esquematización y simulación ..................................................... 22.
(9) 3. 3.1. PARÁMETROS DE DISEÑO Y CONSTRUCCIÓN DEL TABLERO ELECTRÓNICO-DIGITAL Normativa de la Fórmula SAE ......................................................................... 24. 3.2 3.3 3.4 3.5 3.6. Diseño del tablero electrónico-digital .............................................................. 24 Parámetros de diseño para la pantalla LCD ..................................................... 24 Instrumentos en el tablero electrónico-digital. ................................................. 26 Ergonomía del puesto de mando del conductor. .............................................. 26 Interfaz persona-maquina: relación informática y de control. ......................... 27. 3.7. Diseño de interfaz del tablero electrónico-digital. ........................................... 28. 3.8. Medición de las señales de los sensores. .......................................................... 31. 3.9. Circuito de cambio de señal para el sensor CKP. ............................................ 33. 3.10. Lógica del programa Bascom AVR ................................................................. 35. 3.11 3.12 3.13 3.14 3.15 3.16 3.17. Proceso de programación del microcontrolador ATMEGA 328P ................... 41 Programación de la temperatura....................................................................... 42 Programación de las RPM ................................................................................ 45 Programación de la velocidad .......................................................................... 47 Programación de los cambios de marcha ......................................................... 49 Programación de odómetro .............................................................................. 50 Diseño del interfaz del tablero ......................................................................... 51. 3.18 3.19 3.20. Simulación de la programación del microcontrolador. .................................... 57 Posicionamiento de los botones e interruptores en el tablero. ......................... 58 Colocación de la Pantalla LCD. ....................................................................... 59. 4. 4.1 4.2. IMPLEMENTACIÓN Y SELECCIÓN DE MATERIALES Procedimientos estipulados por la normativa de la SAE ................................. 61 Selección de materiales .................................................................................... 61. 4.3 4.4. Tarjeta Electrónica de las señales de los sensores ........................................... 62 Placa electrónica del convertidor de onda. ....................................................... 63.
(10) 4.5 4.6. Visera y soporte de la pantalla LCD ................................................................ 64 Estructura de los botones del motor. ................................................................ 64. 5. 5.1 5.2. PRUEBAS Y RESULTADOS Plan de Pruebas. ............................................................................................... 66 Pruebas de sensores .......................................................................................... 66. 5.3 5.4 5.5 5.6 5.7. Prueba del interfaz de la pantalla LCD. ........................................................... 67 Prueba de las revoluciones del motor............................................................... 68 Prueba de la velocidad del Monoplaza............................................................. 69 Prueba de la temperatura del refrigerante ........................................................ 69 Prueba de visualización y cambio de marcha .................................................. 70. 6. 6.1 6.2 6.3. COSTOS DE FINANCIAMIENTO DE CONSTRUCCIÓN .......................... 71 Detalle de costos directos ................................................................................. 71 Detalle de costos indirectos .............................................................................. 75 Costos Totales .................................................................................................. 75. 7 7.1 7.2. CONCLUSIONES Y RECOMENDACIONES. .............................................. 76 Conclusiones. ................................................................................................... 76 Recomendaciones ............................................................................................. 77. BIBLIOGRAFÍA ANEXOS PLANOS.
(11) LISTA DE TABLAS Pág. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12.. Evaluaciones de los eventos estáticos y dinámicos ................................................. 4 Modelos Nextion ................................................................................................... 17 Especificaciones .................................................................................................... 17 Características Electrónicas ................................................................................... 18 Características de la memoria................................................................................ 18 Dimensiones y espaciamientos de los caracteres en pantalla ................................ 25 Valores de resistencia y temperatura. .................................................................... 43 Costos de los materiales de construcción .............................................................. 71 Costos de los equipos utilizados ............................................................................ 74 Costos Directos...................................................................................................... 75 Costos indirectos ................................................................................................... 75 Costos totales ......................................................................................................... 75.
(12) LISTA DE FIGURAS Pág. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. 24. 25. 26. 27. 28. 29. 30. 31. 32. 33. 34. 35. 36. 37. 38. 39.. Despiece de un cuentakilómetros analógico ........................................................... 6 Velocímetro y Odómetro digitales .......................................................................... 6 Cableado eléctrico vehicular. .................................................................................. 7 Circuito impreso en el cuadro de instrumentos. ...................................................... 8 Señales que recibe el cuadro de instrumentos ......................................................... 9 Panel de instrumentos digital del vehículo Audi TT ............................................. 10 Cuadro de instrumentos digital del vehículo Toyota Prius Prime ......................... 11 Partes del Sensor de Temperatura ......................................................................... 11 Estructura del Sensor de Presión ........................................................................... 12 Estructura del sensor de Oxigeno Calefactado Tipo Dedal ................................... 12 Sensor de Revoluciones del Cigüeñal ................................................................... 13 Estructura básica del Sensor Hall .......................................................................... 14 Esquema de funcionamiento de un Sensor Capacitivo. ........................................ 14 Sensor de posición del cigüeñal ............................................................................ 15 Funcionamiento de un sensor de ultrasonido ........................................................ 15 Sensor Óptico ........................................................................................................ 16 Potenciómetro como transductor de posición angular .......................................... 16 Nextion NX8048K070_011 pantalla TFT de 7,0” HMI ....................................... 17 Dimensiones de la Pantalla.................................................................................... 19 Programación del microcontrolador ...................................................................... 20 Proceso de la compilación de un programa escrito en Basic en código hex ......... 21 Esquema electrónico en Proteus ............................................................................ 22 Posición más adecuada para conducir. .................................................................. 27 Modelos 1, Tablero del vehículo Chevy Corvette ................................................. 28 Modelo 2, Tablero del vehículo Lexus LFA ......................................................... 29 Modelo 3, Tablero del vehículo Cadillac ELR ...................................................... 29 Adobe Illustrator Cs6 ............................................................................................ 29 Interfaz del programa Adobe Illustrator CS6 ........................................................ 30 Imagen seleccionada.............................................................................................. 30 Vectorización del primer modelo .......................................................................... 31 Vectorizado del sello de la Carrera ....................................................................... 31 Equipos de medición ............................................................................................. 32 Prueba del sensor CKP .......................................................................................... 32 Prueba del sensor ECT .......................................................................................... 32 Prueba del sensor VSS .......................................................................................... 33 Diagrama del circuito ............................................................................................ 33 Circuito en la protoboard ....................................................................................... 34 Comparación de señales del CKP ......................................................................... 34 Circuito terminado ................................................................................................. 34.
(13) 40. 41. 42. 43. 44. 45. 46. 47. 48. 49. 50. 51. 52. 53. 54. 55. 56. 57. 58. 59. 60. 61. 62. 63. 64. 65. 66. 67. 68. 69. 70. 71. 72. 73. 74. 75. 76. 77. 78. 79. 80. 81. 82. 83.. Inicio del programa Bascom AVR ........................................................................ 35 Pantalla principal de Bascom AVR ...................................................................... 35 Selección del microcontrolador a programar ........................................................ 36 Selección del programador a utilizar ..................................................................... 36 Creación de un programa ...................................................................................... 37 Botones para compilar y grabar la programación ................................................. 37 Pantalla de grabación del microcontrolador .......................................................... 38 Diagrama de flujo del proceso de programación del microcontrolador ................ 41 Definir las directivas del compilador ................................................................... 42 Curva del sensor ECT............................................................................................ 43 Divisor de Tensión con R_1 cerca de Vin ............................................................ 44 Divisor de Tensión con R_1 cerca de GND ......................................................... 44 Programación de la temperatura. ........................................................................... 45 Programación de las revoluciones por minuto ...................................................... 47 Programación de la velocidad ............................................................................... 49 Programación de los cambios de marchas ............................................................. 50 Programación del odómetro .................................................................................. 50 Primer diseño terminado Illustrator CS6 ............................................................... 51 Segundo diseño terminado en Illustrator CS6 ....................................................... 51 Interfaz del programa ............................................................................................ 52 Diagrama de flujo del proceso para la programación en la pantalla ..................... 52 Nuevo archivo y selección de pantalla .................................................................. 53 Botones de programación en Nextion Editor ........................................................ 53 Introducción de las imágenes en la pantalla LCD ................................................. 54 Introducción de texto y números ........................................................................... 54 Herramienta para personalización de texto ........................................................... 55 Verificación de errores en la programación .......................................................... 55 Simulación de la pantalla. ..................................................................................... 56 Grabación en la Pantalla LCD ............................................................................... 56 Simulación del microcontrolador. ......................................................................... 57 Circuito construido. ............................................................................................... 57 Posicionamiento de la placa en el monoplaza ....................................................... 58 Botones e interruptor de encendido en el monoplaza............................................ 58 Posicionamiento de los botones e interruptor de encendido ................................. 59 Protección de la pantalla LCD............................................................................... 59 Colocación de la Pantalla LCD ............................................................................. 60 Tablero terminado ................................................................................................. 60 Pantalla LCD Nextion seleccionada ...................................................................... 61 Tarjeta electrónica de las señales de los sensores ................................................. 62 Placa electrónica de las señales de los sensores al reverso ................................... 62 Placa electrónica de convertidor de onda .............................................................. 63 Placa electrónica de convertidor de onda al reverso ............................................. 63 Visera y soporte del tablero electrónico digital ..................................................... 64 Estructura de los pulsadores del motor.................................................................. 65.
(14) 84. 85. 86. 87. 88. 89. 90.. Pantalla LCD activa............................................................................................... 66 Medición de señal de los sensores ......................................................................... 67 Interfaz del tablero electrónico-digital .................................................................. 68 Pruebas de revolucione del motor. ........................................................................ 68 Prueba de la velocidad del vehículo ...................................................................... 69 Prueba de la temperatura del refrigerante del motor ............................................. 70 Prueba de los cambios de marchas ........................................................................ 70.
(15) SIMBOLOGÍA V d Dc D T w f r. velocidad Distancia Diámetro catalina Diámetro de la rueda Periodo Velocidad angular Frecuencia Radio. t. Tiempo. m/s m pulg M s rad/s Hz M s.
(16) LISTA DE ABREVIACIONES ECU SAE TPS CKP RPM CKP VSS ECT TFT HMI LCD PTC NTC LED CPU RAM RTC PC. Unidad de Control Electrónica Sociedad de Ingenieros Automotrices Sensor de Posición de mariposa del acelerador Sensor de Posición del Cigüeñal Revoluciones por minuto Sensor de Posición del Cigüeñal Sensor de Velocidad del Vehículo Sensor de Temperatura del Refrigerante del motor Transistor de Películas Finas Interfaz Hombre-Máquina Pantalla Cristal Liquida Coeficiente de Temperatura Positiva Coeficiente de Temperatura Negativa Diodo Emisor de Luz Unidad Central de Procesamiento Memoria de Acceso Aleatorio Reloj Interno en Tiempo Real), Computadora Personal.
(17) LISTA DE ANEXOS A B C D E F G H. Programación en el microcontrolador Circuitos realizados en el Programa Proteus Diagrama de pines del microcontrolador Circuitos impresos de las placas Construcción de los circuitos electrónicos Graficas en 3D de los circuito Características de la pantalla LCD Nextion Medidas de la pantalla LCD Nextion.
(18) RESUMEN El presente trabajo de titulación tiene como objetivo diseñar y construir un tablero electrónico-digital basado en la normativa vigente de la fórmula SAE para contribuir con la construcción de un vehículo de competencia para la ESPOCH. El trabajo se inició con ayuda del software Adobe Illustrator CC en el cual se diseñó las dos interfaz para el tablero electrónico-digital, mediante el software Proteus se realizó los diseños de los circuitos de la tarjeta electrónica de las señales de los sensores y de la placa electrónica que convierte el tipo de onda senoidal a cuadrada, una vez finalizado se procedió a su construcción, mediante el software Bascom AVR se realizó la programación, la misma que fue grabada en el microcontrolador ATMEGA 328P y que contiene parámetros tales como: temperatura del refrigerante, la velocidad del vehículo, las revoluciones por minuto, el odómetro y los cambios de marcha, estos son visualizados en la pantalla TFT Nextion, para obtener una buena visibilidad de los indicadores del tablero electrónicodigital, se construyó una visera de fibra de vidrio la cual es encargada de proteger y generar sombra. Se emplearon pruebas y métodos de medición, cuyos resultados obtenidos evidenciaron el correcto funcionamiento del tablero electrónico-digital el cual muestra los diferentes parámetros al conductor sobre el comportamiento del vehículo de competencia, con la finalidad de salvaguardar la integridad física de los elementos del monoplaza. Con la investigación realizada se concluye que el tablero electrónico-digital es de gran aporte durante la competencia para mantener informado al conductor sobre el estado del vehículo. Se recomienda que los sensores estén calibrados adecuadamente para obtener datos seguros, precisos y confiables. PALABRAS CLAVES: < SOCIEDAD DE INGENIEROS AUTOMOTRICES (SAE) >, < PANTALLA CRISTAL LÍQUIDO (LCD) >, < UNIDAD DE CONTROL DE MOTOR (ECU) >, < INTERFAZ HOMBRE-MÁQUINA (HMI) >, < SENSOR DE TEMPERATURA DEL REFRIGERANTE (ECT) >, < SENSOR DE POSICIÓN DEL CIGÜEÑAL (CKP) >, < SENSOR DE VELOCIDAD DEL VEHÍCULO (VSS) >, < TRANSISTOR DE PELÍCULAS FINAS (TFT) >..
(19) ABSTRACT The objective of the present titling work is to design and build an electronic-digital dashboard based on the current regulations of the “SAE” formula (Society of Automotive Engineers) to contribute to the construction of a competition vehicle for Polytechnic Superior School of Chimborazo, “ESPOCH”. The job was started with the help of Adobe Illustrator CC software in which the two interfaces were designed for the electronicdigital dashboard, through Proteus software was carried out the design of the circuits of the electronic card of the signals from the sensors signals and electronic board that converts the type of sine wave to square, once completed it was proceeded to its construction via Bascom AVC software program the same that was recorded on the ATMEGA 328P microcontroller and contains parameters such as: coolant temperature, vehicle speed, revolutions per minute, the odometer and gear changes are displayed on the Nextion (TFL) Thin film transistor display to obtain good visibility of the electronicdigital dashboard indicators. A fiberglass visor was built which is responsible for protecting and generating shade. Measurements and methods were used, whose obtained results showed the correct functioning of the electronic-digital dashboard which shows the different parameters to the driver on the behavior of the competition vehicle. In order to safeguard the physical integrity of the elements of the car. The research concluded that the electronic-digital board is a great contribution during the competition to keep the driver informed about the state of the vehicle. It is recommended that sensors be properly calibrated to obtain safe data, precise and reliable. KEY WORDS: <SOCIETY OF AUTOMOTIVE ENGINEERS (SAE)>, <LIQUID CRYSTAL SCREEN (LCD)>, <ENGINE CONTROL UNIT (ECU)>, <MANMACHINE INTERFACE (HMU)>, <COOLANT TEMPERATURE SENSOR (ECT)>, <CRANKSHAFT POSITION SENSOR (CKP)>, <VEHICLE SPEED SENSOR (VSS)>, <THIN FILM TRANSISTOR (TFT)>..
(20) CAPÍTULO I 1.. INTRODUCCIÓN. 1.1. Generalidades. En actualidad en el mercado automotor del país existen pocos vehículos con tablero de instrumentos totalmente electrónicos-digitales y se tiene conocimiento que en los vehículos de alta gama y los vehículos de competencia como los de la Fórmula 1 tienen este tipo de tablero. Debido a que la Escuela Superior Politécnica de Chimborazo conjuntamente con la Carrera de Ingeniería Automotriz y con el apoyo de las autoridades, desea construir un vehículo de tipo monoplaza con la finalidad de ir a competir en la Fórmula SAE, se considera fundamental este trabajo de titulación, ya que el tablero electrónico-digital se encargara de mostrar al conductor los diferentes parámetros sobre el comportamiento del vehículo de competencia y así salvaguardar la integridad física de los elementos que lo constituyen, también. con la. implementación de este tablero de instrumentos. electrónico-digital se pretende fomentar la investigación y el desarrollo tecnológico del país en el campo automotriz.. 1.2. Antecedentes. La Fórmula Student, conocida también como la Fórmula SAE por sus siglas en inglés, (Society of Automotive Engineers) nace en Michigan, Estados Unidos, actualmente esta competencia cuenta con 9 sedes en 8 diferentes países. (SAE, 2011) Es una competencia automovilística que reúne a las mejores universidades del mundo, lo que se pretende calificar en este tipo de competencias es el trabajo de ingeniería que hay detrás de todo proceso de diseño, creación, puesta a punto y evolución de un coche de competencias. Este tipo de eventos se realiza una vez al año donde participan universidades de todo el mundo y cuenta con el apoyo completo de grandes fabricantes automovilísticos como son: Ford, Porsche, BMW, entre otras marcas reconocidas a nivel mundial. (SAE, 2011) 1.
(21) La importancia de participar en esta competición es incentivar a estudiantes de Ingeniería Automotriz a ser innovadores y emprendedores, promoviendo la excelencia mediante el diseño y la construcción de un vehículo de competencia de altas prestaciones, para competir contra las mejores universidades del mundo. Todas las Universidades participantes están bajo la normativa de la Fórmula SAE, llegando a recibir hasta 140 equipos y más de 2500 estudiantes. Los resultados de las competiciones son recogidos y mostrados en el ranking mundial de la FSAE. Los vehículos son evaluados en una serie de análisis estáticos y dinámicos los mismos que son puntuados. Con el diseño y construcción de este Tablero Electrónico-Digital se pretende monitorear y dar seguimiento del funcionamiento y desarrollo del monoplaza, recogiendo los parámetros del vehículo de competencia que son de vital importancia para el conductor durante la competencia. Y de esta manera poder competir en la Fórmula SAE en igualdad de condiciones tecnológicas y científicas dejando en alto el nombre de la institución y del país, ya que se tiene conocimiento que las universidades que actualmente representan al Ecuador son la Universidad de las Fuerzas Armadas y la Universidad Politécnica Salesiana los cuales poseen tableros con una combinación análogo-digital y digital. Con este trabajo de titulación se pretende demostrar que en la ESPOCH y en el país existe talento humano, con capacidad de crear nuevos sistemas acordes a los adelantos tecnológicos y científicos actuales en el campo automotriz. Se espera que con la información producida en este trabajo de titulación, pueda ser utilizada para la implementación de tableros electrónico-digital en el parque automotor del país. 1.3. Justificación. En él presente trabajo de titulación se trata del diseño y construcción de un tablero electrónico-digital, para complementar una parte importante en la realización de un vehículo de competencia de la Fórmula SAE que cumpla con todas las características y la reglamentación estipulada, el cual se está llevando a cabo en La Escuela Superior Politécnica de Chimborazo con la Carrera de Ingeniería Automotriz y con el pleno apoyo 1.
(22) de las autoridades, fomentando la investigación en los estudiantes de la Carrera y dando el primer paso de grandes investigaciones en beneficio de futuras generaciones que ayudarán en el desarrollo tecnológico del país. El tablero electrónico-digital tiene como principal objetivo monitorear y dar seguimiento al funcionamiento y desarrollo del monoplaza, recogiendo los parámetros del vehículo de competencia que son de vital importancia para el conductor, así como los parámetros críticos del motor tales como: La temperatura del refrigerante, velocidad y revoluciones del motor. Con este dispositivo se pretende ir a la par con el desarrollo tecnológico, de brindarle al vehículo una mejor estética y de contribuir al confort del conductor. 1.4. Objetivos. 1.4.1. Objetivo general. Diseñar y construir un tablero electrónico-digital basado en. la normativa vigente de la Fórmula SAE para contribuir con la construcción de un vehículo de competencia para la ESPOCH. 1.4.2. Objetivos específicos:. Conocer las normas vigentes según el reglamento de la Fórmula SAE sobre el tablero electrónico-digital para su correcta elaboración. Diseñar el tablero electrónico-digital de tal manera que el conductor pueda monitorear y observar los parámetros que envía la ECU del estado de vehículo en el momento que este en movimiento, para que con cuyo seguimiento y evaluación periódica permita contar con un mayor conocimiento de la situación actual en la que se encuentre el monoplaza de competencia. Implementar el tablero de instrumentos electrónico-digital, utilizando procedimientos estipulados en la normativa SAE para la selección de materiales y procedimientos adecuados que garanticen la fiabilidad del monoplaza. Realizar pruebas de monitoreo de las diferentes señales del funcionamiento del 2.
(23) monoplaza de la Fórmula SAE en el Tablero de Instrumentos electrónico-digital mediante la visualización de. los valores y variables emitidas por los diferentes sensores y. actuadores, utilizando los recursos tecnológicos que se dispone actualmente en nuestro medio.. 3.
(24) CAPÍTULO II 2.. MARCO TEÓRICO Formula SAE. Es La Fórmula SAE (Society of Automotive Engineers) es un concurso de diseño de ingeniería para estudiantes de pregrado y posgrado. El concurso ofrece a los participantes la oportunidad de mejorar sus habilidades de diseño de ingeniería y gestión de proyectos mediante la aplicación de los conocimientos teóricos aprendidos en el aula y puestos en práctica en una competición exigente. (SAE, 2011) Fórmula SAE promueve las carreras y la excelencia en ingeniería, ya que abarca todos los aspectos de la industria del automóvil, incluyendo la investigación, diseño, fabricación, pruebas, desarrollo, comercialización, administración y finanzas. Cada equipo de estudiantes diseña, construye y pone a prueba un prototipo basado en una serie de normas de la FSAE cuya finalidad es tanto para garantizar las operaciones en el sitio del evento y promover la ingeniosa solución de problemas. (SAE, 2011) Hoy en día, la competencia se ha ampliado e incluye una serie de spin off eventos. En los Estados Unidos hay dos lugares: Michigan y Nebraska; Michigan, siendo el evento más grande y de más larga duración. (SAE, 2011) Los vehículos son evaluados en una serie de análisis estáticos y dinámicos que incluyen: la inspección técnica, el coste, la presentación, el diseño de ingeniería, los ensayos de comportamiento y el rendimiento en pista. Estas evaluaciones son puntuadas. (OSCAR, 2009) En cada evaluación se pueden dar las siguientes puntuaciones máximas: Tabla 1. Evaluaciones de los eventos estáticos y dinámicos Eventos estáticos Puntos Presentación. 75. Diseño de ingeniería. 150 4.
(25) Tabla 1. (Continuación) Análisis de coste 100 Eventos dinámicos. Puntos. Aceleración. 75. Skid-Pad (derrapaje). 50. Autocross. 150. Economizar combustible. 50. Resistencia. 350. TOTAL. 1000. Fuente: Reglamento de la Fórmula SAE 2016, pág. 5 Cuadro de instrumentos. El cuadro de instrumentos o cuadro porta instrumentos se sitúa en el salpicadero del vehículo, en una posición estudiada con criterios ergonómicos que facilita la visualización e interpretación de los datos. (PÉREZ, 2014) El cuadro de instrumentos tiene la misión de informar al conductor sobre el estado actual en el que se encuentra el vehículo como son: número de revoluciones del motor, velocidad, temperatura, nivel de líquido de depósito de combustible, sistema de iluminación, etc. Depende de la información que se facilite o del tipo de control que se desee realizar, el cuadro de instrumentos vendrá equipada con los siguientes dispositivos: Testigos de advertencia, informan mediante señales ópticas del estado de los principales circuitos del vehículo como son: . Temperatura del Motor. . Freno de estacionamiento. . Circuito de carga, Alumbrado. . Presión de aceite, etc. (PÉREZ, 2014) Velocímetro y tacómetro. Uno de los componentes fundamentales del cuadro de. instrumentos es el velocímetro, que generalmente se combina con un cuentakilómetros u odómetro. El primero indica el desplazamiento de una aguja sobre escala graduada, la velocidad del vehículo, mientras que el segundo contabiliza los kilómetros recorridos 5.
(26) El conjunto de velocímetro y odómetro se comanda desde la caja de velocidades del vehículo, de la que toma movimiento giratorio por medio de un cable flexible con funda, que se acopla a un conjunto de engranajes a los que transmite el giro, que desde aquí es llevado a los respectivos tambores cuentakilómetros por medio de dos ejes sinfín. (PÉREZ, 2014) Figura 1. Despiece de un cuentakilómetros analógico. Fuente: http://www.aficionadosalamecanica.net/instrumentos-cuadro.htm La evolución experimental en el campo de la electrónica ha permitido el desarrollo de velocímetros y odómetros electrónicos, que representan indudables ventajas de fiabilidad y precisión en la medida. El velocímetro electrónico lo constituye esencialmente un indicador voltímetrico de aguja, cuya bobina recibe los impulsos de mando de una unidad electrónica, que los elabora en función de las señales que recibe de un sensor de velocidad, generalmente del tipo hall. Este sensor se ubica en el sistema de transmisión, en la caja de cambios. Basándose en el mismo principio de funcionamiento se estructura el tacómetro o cuentarrevoluciones, cuyo sensor lo constituye un generador de impulsos de inducción colocados frente al dentado de la corona del volante motor. (PÉREZ, 2014) Figura 2. Velocímetro y Odómetro digitales. Fuente: https://www.pinterest.com/pin/565412928197120673/ Cableado eléctrico. La instalación eléctrica de un moderno automóvil engloba un gran número de componentes que se organizan en diferentes equipos y se conectan entre sí por medio de 6.
(27) cables extendidos por todo el vehículo. Los cables conductores están reunidos entre si y rodeados de cinta plástica, formando mazos que reciben el nombre de cableados. Cada uno de los conductores se distingue por el color de su funda aislante, lo que permite identificarlos en la entrada y salida del mazo correspondiente. Para facilitar las reparaciones que eventualmente puedan producirse y el desmontaje de componentes, la instalación eléctrica se divide en partes, cuyos cableados están debidamente identificados y se conexionan entre sí por conectores adecuados. Resulta frecuente disponer los siguientes cableados: Cableado Delantero. Comprende los elementos eléctricos de la parte delantera del vehículo que van fijados a la carrocería. (PÉREZ, 2014) Cableado del Motor. Se conecta al interior y conexiona los elementos eléctricos que van montados en el motor del vehículo. (PÉREZ, 2014) Cableado del Salpicadero. Conexiona todo los elementos del cuadro de instrumentos con el resto de componentes de la instalación eléctrica. (PÉREZ, 2014) Cableado del habitáculo. Comprende los elementos del interior del habitáculo, como luces interiores, luneta térmica, etc. (PÉREZ, 2014) Cableado trasero. Comprende los aparatos eléctricos de la parte trasera del vehículo y el maletero. (PÉREZ, 2014) Cableado auxiliar. Interconecta a los anteriores aquellos elementos eléctricos que por su situación en el vehículo requieren un cableado especial o independiente de la instalación general. (PÉREZ, 2014) .Figura 3. Cableado eléctrico vehicular.. Fuente: http://www.bmw.es/home/footer/1/glosario/cableado.html 7.
(28) Conexión y estructura del cuadro de instrumentos. Cada uno de los indicadores y pilotos testigo del cuadro de instrumentos, debe conectarse a los correspondientes sensores por medio de la instalación eléctrica, utilizando para ello los conectores adecuados. Para simplificar al máximo la instalación eléctrica del cuadro, se dispone en su parte trasera una lámina de circuito impreso, como es conocido, que efectúa la conexión entre cada uno de los indicadores y piloto testigo con los conectores a los que se unen los mazos de cable. (PÉREZ, 2014) Figura 4. Circuito impreso en el cuadro de instrumentos.. Fuente: (PÉREZ, 2014) La lámina de circuito impreso se acopla y fija a la carcasa del cuadro en su parte trasera externa, y a ella se unen las diferentes lámparas de los pilotos en los respectivos portalámparas, que efectúan la conexión de patillas especialmente dispuestas. Los indicadores de aguja se conectan a la placa de circuito impreso por medio de pequeños tornillos de cobre. (PÉREZ, 2014) Para la iluminación de los indicadores del cuadro de instrumentos suele utilizarse en la actualidad un sistema de fibra óptica, mediante el cual se canaliza la luz hacia los puntos de iluminación. Los rayos de luz emitidos por la lámpara, son canalizados por cada uno de los cables de fibra hacia los puntos que se desee iluminar en el cuadro de instrumento. En mucho de los vehículos actuales se dispone un cuadro de instrumentos provisto de una unidad de electrónica de control para el gobierno de los diferentes indicadores y lámparas de alerta, como es conocido. Las señales recibidas de los diferentes sensores, son atrapadas convenientemente por la central electrónica, que las transforma en pulsos de mando para los diversos indicadores, y mensajes para la pantalla display. (PÉREZ, 2014) 8.
(29) Figura 5. Señales que recibe el cuadro de instrumentos. Fuente: (PÉREZ, 2014) Panel de instrumento digital. La tecnología ha avanzado en los sistemas eléctricos y electrónicos y han posibilitado a tener mejores interfaz en vehículos de alta gama, la introducción de la gestión electrónica tanto en motores a gasolina y diésel y la creación de vehículos híbridos y eléctricos han automatizado los mecanismos como las elevalunas, la apertura y cierre de puertas, el control de los asientos, entre otros. A su vez, han permitido incorporar en el vehículo sistemas más novedosos como los cuadro de instrumentos electrónicos-digitales. (Ferrer, 2013) Actualmente, debido a los grandes requerimientos técnicos y de confort en vehículos de alta gama y convencionales, se ensamblan verdaderas redes eléctricas y electrónicas de transferencia de datos. Estas redes proporcionan la interconexión entre las distintas unidades de control con el fin de gestionar los actuadores de los diferentes sistemas eléctricos y electrónicos de acuerdo con las informaciones recibidas por los sensores y distintas unidades de control. (Ferrer, 2013) La tecnología aplicada al panel de instrumentos hace que se tenga cada vez mejores e innovadores diseños, pasando de los indicadores analógicos tradicionales a los indicadores totalmente digitales, los cuales se montan en vehículos de alta gama debido a su coste elevado de fabricación. Los paneles de instrumentos digitales (modernos) utilizan iluminación por grupos de LED, ya que permite que el panel tenga una forma moderna y que ocupe relativamente poco espacio además de mayor durabilidad. (DOBLADO, y otros, 2011) 9.
(30) Figura 6. Panel de instrumentos digital del vehículo Audi TT. Fuente: http://www.autobild.es/reportajes/los-cinco-mejores-cuadros-instrumentos Fortalezas del panel de instrumentos digital. El panel de instrumentos digital presenta varias fortalezas que los hacen ideal para la mayoría de las aplicaciones. Por lo general, son más precisos que los analógicos. La lectura de la medida es mucho más cómoda, ya que leemos directamente la cifra en la pantalla sin tener que interpretar una escala graduada. Esto los hace ideales en su uso como aparatos portátiles, donde es muy importante tomar una lectura rápida y precisa de la medida. Son muy robustos: aguantan fuertes impactos y vibraciones sin alteración de su funcionamiento. Este último se debe a que en su estructura no existen elementos móviles. Los instrumentos de medida analógicos tienden a ser sustituidos cada vez más por los digitales debido a sus múltiples beneficios que esta nos brinda. (Miguel, 2011) Aplicación del cuadro de instrumentos digital en vehículos híbridos y eléctricos. Los vehículos híbridos y eléctricos necesitan dispositivos que permitan informar al conductor del estado de los componentes eléctricos y del funcionamiento del vehículo. Los principales elementos del cuadro de instrumentos de estoy vehículos son: 2.4.2.1 Reloj indicador de potencia. Generalmente se presenta mediante un reloj o un display intuitivo que muestra la potencia global y los modos de funcionamiento tanto de potencia como de recuperación energética. (OSCAR, 2009) 2.4.2.2 Indicador de energía. Este instrumento marca el estado de carga de la batería como si de un reloj indicador de combustible se tratara. (OSCAR, 2009) 2.4.2.3 Pantalla multifunción. Algunos vehículos disponen de pantallas de cristal líquido que integran todos o gran parte de los instrumentos informativos. En esta pantalla se puede ver de forma gráfica gran parte de información, entre ellas tenemos los modos de funcionamiento, el estado de carga de la batería, autonomía, etc. (OSCAR, 2009) 10.
(31) Figura 7. Cuadro de instrumentos digital del vehículo Toyota Prius Prime. Fuente: http://www.actualidadmotor.com/nuevo-toyota-prius-prime-hibrido Sensores Los sensores son elementos que tienen como finalidad convertir el valor de una magnitud física en una señal eléctrica. Estas señales eléctricas son enviadas a la unidad de control electrónico (ECU), que realizara el procesado de toda esta información y establecerá los valores adecuados que tendrán que tener los actuadores para que el sistema funcione correctamente. La variedad de sensores que se emplean en un automóvil es tan extensa que resulta prácticamente imposible realizar una única clasificación que sea completa y exhaustiva, entre las principales que se utilizan en la actualidad en vehículos convencionales son los que se describen a continuación. (DOBLADO, y otros, 2011) Sensor de Temperatura. También llamados termistores, los sensores de temperatura son elementos que suministran una señal eléctrica en función de la temperatura a la que están sometidos. En el mundo de la automoción se utilizan tres tipos de sensores de temperatura: el sensor PTC (coeficiente de temperatura positivo), el sensor NTC (coeficiente de temperatura negativo) y el bimetal. (DOBLADO, y otros, 2011) Figura 8. Partes del Sensor de Temperatura. Fuente: http://www.fae.es/es/productos/sensor-temperatura 11.
(32) Sensor de Presión. Los sensores de presión son elementos que producen o modifican una señal eléctrica en función de la presión a la que se halle sometida. Los sensores de presión más utilizadas en el automóvil son: . La piezorresistencia, también llamado manorresistencia galgas extensiométrica. . El sensor piezoeléctrico. . El mano contacto (del griego manos = presión), también denominado manorruptor o contacto de presión. (DOBLADO, y otros, 2011) Figura 9. Estructura del Sensor de Presión. Fuente: https://sites.google.com/site/confort44david/6-4 Sensor de Oxigeno. Un sensor de oxigeno es un generador de tensión que está basado en la diferencia de contenido de oxigeno que hay entre los fluidos. El oxígeno es un elemento químicamente muy reactivo, por eso cuando hay diferentes concentraciones de oxigeno entre dos medios, aparece una diferencia de potencia eléctrica. El sensor de oxigeno más importante que se utiliza en el automóvil es la sonda lambda que verifica la compresión de los gases de escape. Los sensores de oxígeno para el análisis de los gases de escape son una de los elementos que más ha evolucionado debido a su gran importancia en el control de las emisiones nocivas. (DOBLADO, y otros, 2011) Figura 10. Estructura del sensor de Oxigeno Calefactado Tipo Dedal. Fuente: http://www.amortiguadoresgabriel.cl/sensor-oxigeno/ 12.
(33) Sensor electromagnético. Los sensores de tipo electromagnético son elementos que basan su funcionamiento en la interacción entre el magnetismo y la electricidad. Concretamente los tres sensores clasificados en esta categoría son: . El sensor inductivo.. . El sensor Hall.. . El sensor Reed.. Y los tres. contienen imanes permanentes. y utilizan algunas propiedades. electromagnéticas para proporcionar una señal eléctrica en función de las condiciones del sistema. (DOBLADO, y otros, 2011) 2.5.4.1 Sensor Inductivo. El sensor inductivo provoca una variación de flujo magnético para generar una corriente eléctrica en una bobina. Lo sensores inductivos pueden adaptarse múltiples formas constructivas. Los sensores inductivos son muy utilizados en el automóvil, casi siempre relacionado con sensores de velocidad angular (sensores de giro) de muchos elementos, algunos ejemplos pueden ser: . En los embragues pilotados, como sensores de giro de entrada y de salida del embrague.. . En las transmisiones automáticas, como sensores de giro de cada velocidad.. . Además, son muchos los motores eléctricos y los compresores de todo tipo que contienen sensores inductivos para el seguimiento de su rotación. (DOBLADO, y otros, 2011) Figura 11. Sensor de Revoluciones del Cigüeñal. Fuente: http://www.aficionadosalamecanica.net/sensores2-modelos.htm 13.
(34) 2.5.4.2 Sensor de Efecto Hall. El sensor de efecto Hall está basado en la aparición de una diferencia de potencial eléctrico en ciertos materiales que se encuentran bajo la influencia de un campo magnético y a través de los cuales fluye una corriente eléctrica. Estos materiales (Hall) tienen las propiedades de ser a la vez conductores y paramagnéticos. Hay muchos materiales con esas propiedades, pero los más utilizados son cristales dopados de silicio o de germanio. Las aplicaciones de los sensores de efecto Hall han sido y sigue siendo muy amplia y variada: . Sensor de velocidad angular y posición en motores térmicos. . Sensores de giro para cada velocidad en caja de cambios automáticas.. . Sensores de freno para frenos ABS.. . Sensores de aceleración para sistemas de control. (DOBLADO, y otros, 2011) Figura 12. Estructura básica del Sensor Hall. Fuente: http://www.aficionadosalamecanica.net/encendido Sensor Capacitivo. Un sensor capacitivo consiste en un condensador de láminas paralelas, donde el material eléctrico entre las capas es el elemento del cual se desea medir sus propiedades o características. Para conseguir esto es necesario incorporar el condensador a un circuito eléctrico con una resistencia y una inductancia formando así un circuito RLC. (DOBLADO, y otros, 2011) Figura 13. Esquema de funcionamiento de un Sensor Capacitivo.. Fuente: (DOBLADO, y otros, 2011) 14.
(35) Sensor de posición. Los sensores de posición son elementos que permiten detectar la posición en la que se encuentra un elemento mecánico. Generalmente están activados automáticamente por el movimiento de una pieza, pero también los hay que están movidos directamente por el conductor. Aunque su principio de funcionamiento está basado en la resistencia variable, hay dos tipos de sensores de posición bien diferenciados. . El divisor de tensión.. . El modular de ancho de pulso (PWM). (DOBLADO, y otros, 2011) Figura 14. Sensor de posición del cigüeñal. Fuente: http://www.clubmazdavenezuela.com/apps/manuals/3/man_taller_m3/ Sensor de ultrasonido. Los sensores de ultrasonido utilizan ondas sonoras de frecuencia no audible para detectar la presencia de objetos o personas. El sonido consiste en ondas de presión que comprimen y expanden el medio por el que se propaga. Los sensores de ultrasonido se han utilizado en el automóvil en diferentes facetas, los usos más importantes que se han dado son: . Sensor de Distancia. . Sensor de Volumen. . Sensor de Caudal (Efecto Karman). (DOBLADO, y otros, 2011) Figura 15. Funcionamiento de un sensor de ultrasonido. Fuente: http://temporizadoresmei.blogspot.com/2011/06/sensores.htm 15.
(36) Sensor Óptico. Un sensor óptico utiliza las propiedades de emisión y recepción de la luz para detectar una amplia gama de factores. El elemento emisor de luz es un diodo LED que en la mayoría de casos emite un color rojo. Los elementos sensores a la luz pueden ser fotorresistencias, fotodiodos o fototransistores. (DOBLADO, y otros, 2011) Figura 16. Sensor Óptico. Fuente: http://libro-sensores.blogspot.com/2012/07/sensor-optico.html Sensor de tipo potenciómetro. Se emplea tanto para detectar una posición angular como lineal. Suele emplearse como elemento selector, introduciendo la señal de mando al sistema. (CRESPO LÓPES, 2015) Figura 17. Potenciómetro como transductor de posición angular. Fuente: (CRESPO LÓPES, 2015) Pantalla TFT de 7,0” HMI Nextion NX8048K070 Nextion es una solución sin fisuras de interfaz hombre-máquina (HMI) que proporciona una interfaz de control y visualización entre un humano y un proceso, máquina, aplicación o dispositivo. Nextion se aplica principalmente a la IO o campo de la electrónica de consumo. Es la mejor solución para reemplazar el LCD tradicional y tubo de LED 16.
(37) Nixie. Nextion incluye parte de hardware (una serie de tablas TFT) y la parte de software (el editor de Nextion ) en la cual los usuarios son capaces de crear y diseñar sus propias interfaces para la visualización Nextion. (ITead, 2015) Nextion NX8048K070 mejorada es un poderoso "pantalla TFT de 7,0” HMI, con 32 MB de Flash espacio de almacenamiento de datos, 1.024 bytes EEPROM, 8192 bytes de memoria RAM, y GPIO compatible. (ITead, 2015) Figura 18. Nextion NX8048K070_011 pantalla TFT de 7,0” HMI. Fuente: http://g01.a.alicdn.com/kf/ Tabla 2. Modelos Nextion Nextion_Type Mejorado Modelos. NX8048K070_011N (N: No táctil). Nextion. NX8048K070_011R (R: Pantalla táctil Resistiva) Fuente: https://www.itead.cc/wiki/NX8048K070 Tabla 3. Especificaciones Datos. Descripción. Color. 65K (65536) Colores 16 bits, 5R6G5B. Tamaño del diseño. 181 (L) x 108 (W) x. NX8048K070_011N. 7,7 (H) 181 (L) x 108 (W) x. NX8048K070_011R. 9,3 (H) Área activa (AA). 164.90mm (L) x. -. 100.00mm (W) Área Visual (VA). 154.08mm (L) ×. -. 85.92mm (W) Resolución. 800 × 480 píxeles. También se puede establecer como 480 × 800 píxeles. 17.
(38) Tipo de toque. Tabla 3. (Continuación) Resistador -. Toques. > 1000000. -. Iluminar desde el fondo. LED. -. Curso de la vida de luz. > 30.000 horas. -. 250 nit. 0% a 100%, el intervalo de. (NX8048K070_011N). ajuste es 1%. 230 nits. 0% a 100%, el intervalo de. (NX8048K070_011R). ajuste es 1%. 216 g. -. de fondo (media). Brillo. (NX8048K070_011N) Peso. 268 g. -. (NX8048K070_011R) Fuente: https://www.itead.cc/wiki/NX8048K070 Tabla 4. Características Electrónicas Pruebas Min Típico Max Unidad Tensión de funcionamiento. 4.75 VCC = + 5V, -. Corriente de funcionamiento. 5. 7. V. 510. -. mA. 15. -. mA. brillo es 100% Modo de sueño. -. Recomendada Fuente de alimentación: 5V, 2A, DC Fuente: https://www.itead.cc/wiki/NX8048K070. Tipo de memoria Memoria flash. Tabla 5. Características de la memoria Condiciones de pruebas Min Típico Max Unidad Fuentes de las tiendas y las -. -. 32. MB. -. 1042. -. byte. Memoria RAM. Las variables de las tiendas -. 8192. -. Byte. Buffer de instrucciones. Buffer de instrucciones. 1024. imágenes Almacenamiento de. EEPROM. usuario. Fuente: https://www.itead.cc/wiki/NX8048K070 18. Byte.
(39) Figura 19. Dimensiones de la Pantalla. z Fuente: https://www.itead.cc/wiki/File:NX8048T070_(IM150416007).jpg Lenguaje de programación BASIC. Es un lenguaje de programación de alto nivel creado con el propósito de superar las desventajas del ensamblador, ya que varias instrucciones en ensamblador se sustituyen por una sentencia en Basic, así el programador ya no tiene que conocer el conjunto de instrucciones del microcontrolador utilizado. Posee una sintaxis fácil, estructura sencilla y un buen conjunto de operadores. No es un lenguaje específico, es polivalente, potente, se aprende rápidamente, en poco tiempo cualquier usuario es capaz de utilizar casi la totalidad de su código. (PÉREZ, 2015) Microcontroladores AVR MEGA de ATMEL Los microcontroladores AVR MEGA, son las herramientas más actuales y potentes que existen en el mercado. El paquete computacional BASCOM AVR, permite programar toda clase de microcontroladores AVR, de manera rápida y estructurada en alto nivel (Lenguaje Basic). (VALENCIA B., 2013) Dentro de las múltiples familias de microcontroladores los AVR MEGA son los más actuales, recientes y versátiles del mercado. Presentan muchas ventajas en relación a los microcontroladores conocidos como los MCS51-52, Microchip y otros, ya que poseen herramientas internas que facilitan tanto el software como el hardware. (VALENCIA B., 2013) En las herramientas que poseen están: la comunicación o manejo de interfaces SPI, I2C, UART, USB, 1WIRE, 2WIRE. Además están integrados con conversores análogos digitales, RTC (reloj interno en tiempo real), oscilador RC interno, memoria no volátil EEPROM interna, entre otros. (VALENCIA B., 2013) 19.
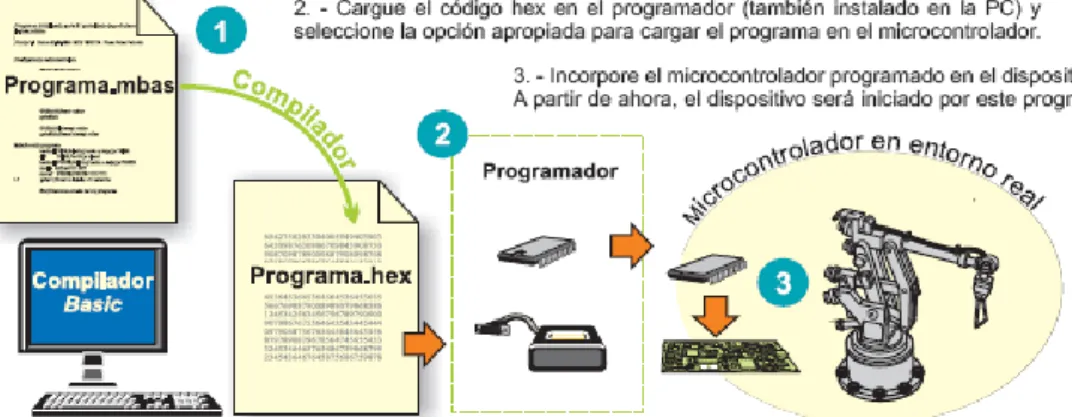
(40) Dentro de esta familia Atmel AVR MEGA el alto rendimiento, bajo consumo de energía microcontrolador de 8bits RISC AVR combina memoria flash de 32 KB ISP con capacidades de lectura, mientras que de lectura-escritura, 1024B EEPROM, 2 KB de SRAM, tres temporizadores flexibles/contadores con comparan los modos, las interrupciones internas y externas, USART programable de serie, una interfaz en serie de 2 hilos orientados a byte, puerto serie SPI, un 6 canales de 10 bits convertidor A/D (8canales en TQFP y QFN / FML paquetes), temporizador de vigilancia programable con oscilador interno, y los modos de ahorro de energía seleccionable de software de cinco. El dispositivo opera entre 1.8-5.5 voltios. Mediante la ejecución de instrucciones de gran alcance en un solo ciclo de reloj, el dispositivo alcanza rendimientos se acerca a 1 MIPS por MHz, equilibrar el consumo de energía y velocidad de procesamiento. Principalmente los. microcontroladores. que. se. tiene. son. ATmega8/ATmega16. /ATmega32/ATmega128/ATmega328. (ATMEL, 2014) Programación del Microcontrolador. El microcontrolador ejecuta el programa cargado en la memoria Flash. Esto se denomina el código ejecutable y está compuesto por una serie de ceros y unos, aparentemente sin significado. Dependiendo de la arquitectura del microcontrolador, el código binario está compuesto por palabras de 12, 14 o 16 bits de anchura. Cada palabra es interpretada por la CPU como una instrucción a ser ejecutada durante el funcionamiento del microcontrolador. Como es más fácil trabajar con el sistema de numeración hexadecimal, el código ejecutable se representa con frecuencia como una serie de los números hexadecimales denominada código Hex. A todas las instrucciones que el microcontrolador puede reconocer y ejecutar se le denominan colectivamente Juego de instrucciones. (VERLE, 2015) Figura 20. Programación del microcontrolador. Fuente:http://cdn.mikroe.com/ebooks/sites/38/2016/02/17153426/ 20.
(41) Proceso de la compilación. El proceso de escribir un programa en Basic. Al seleccionar la opción apropiada, el programa será compilado en el ensamblador y luego en el código hex que será cargado en el microcontrolador. Similar al lenguaje ensamblador, un programa especializado e instalado en la PC se encarga de compilar un programa a código máquina. A diferencia del ensamblador, los compiladores para los lenguajes de programación de alto nivel crean un código ejecutable que no es siempre tan corto como el código escrito en ensamblador. (VERLE, 2015) Figura 21. Proceso de la compilación de un programa escrito en Basic en código hex. Fuente: http://cdn.mikroe.com/ebooks/sites/38/2016/02/17153704/.gif Software de programación Bascom AVR Bascom-AVR es original de Windows, compilador de BASIC para la familia AVR de ATMEL, desarrollado por la empresa Holandesa MCS Electronic que está diseñado para funcionar en XP / Vista / Win7 y Win8. (SOFT, 2012) Bascom viene en tres variantes que son: . Bascom-LT para microcontroladores Atmel AT89Cx051. . Bascom-8051 de 8051 microcontroladores.. . Bascom-AVR de microcontroladores Atmel AVR. Bascom es una aplicación para PC que permite: . Escribir programas en Basic. . Traducir estos programas en el PC para código maquina (un formato que el 21.
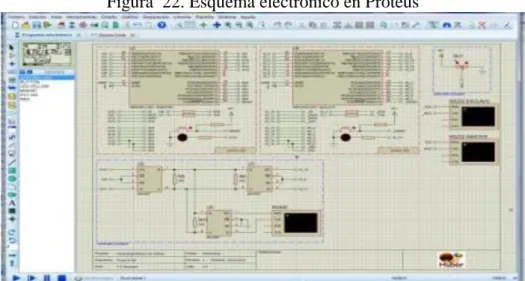
(42) controlador puede ejecutar AVR). . Simular el código compilado. . El uso de programas externos de flash ("programa"), el código compilado en microcontrolador de un AVR Atmel.. Bascom-AVR permite crear rápidamente prototipos porque se ha incorporado soporte para casi todos los microcontroladores AVR características tales como: Contadores / temporizadores, UART, ADC, PWM, I2C. Además de que soporta gran cantidad de periféricos, tales como: Botones, LCD de alfanuméricos, LCD Gráficos, PS/2 para teclado, Control remoto por infrarrojos. Es sobre todo este apoyo que hace que el uso de Bascom AVR atractivo en términos de tiempo ahorrado, mientras que el desarrollo de una aplicación. (Guijarro, 2009) Software de esquematización y simulación Proteus Design Suite. Es un software creado por LABCENTER Electronics Ltd., para la ejecución completa de proyectos de construcción de equipos electrónicos en todas sus etapas como son: diseño, simulación, depuración, documentación y como último construcción. La suite se conforma de varias herramientas perfectamente integradas entre sí las cuales se describen a continuación: Diseñador del esquema electrónico y simulación de circuitos electrónicos, diseñador de la placa de circuito impreso, Visor tridimensional, Visor de ficheros GERBER, Módulo de gestión de la lista de materiales, Módulo de programación y simulación de microcontroladores. (F.J, 2012) Figura 22. Esquema electrónico en Proteus. Fuente: http://www.hubor-proteus.com/images/isis/EsquemaElectronico.jpg 22.
(43) Módulos de Proteus 2.9.2.1 Isis. Es la herramienta para la elaboración avanzada de esquemas electrónicos, que incorpora una librería de más de 6.000 modelos de dispositivos digitales y analógicos. (F.J, 2012) 2.9.2.2 Ares. Es la herramienta para la elaboración de placas de circuito impreso con posicionador automático de elementos y generación automática de pistas, que permite el uso de hasta 16 capas. Con ARES el trabajo duro de la realización de placas electrónicas recae sobre el PC en lugar de sobre el diseñador. (F.J, 2012) 2.9.2.3 Prospice. Es la herramienta de simulación de circuitos según el estándar industrial SPICE3F5. Es el verdadero corazón de Proteus y la herramienta por la que se empieza la ejecución de todos los proyectos. (F.J, 2012) 2.9.2.4 VSM. Es la revolucionaria herramienta que permite incluir en la simulación de circuitos el comportamiento completo de los microcontroladores más conocidos del mercado. PROTEUS es capaz de leer los ficheros con el código ensamblado para los microprocesadores de las familias PIC, AVR, 8051, HC11, ARM/LPC200 y BASIC STAMP y simular perfectamente su comportamiento. Incluso puede ver su propio código interactuar en tiempo real con su propio hardware pudiendo usar modelos de periféricos animados tales como displays LED o LCD, teclados, terminales RS232, simuladores de protocolos I2C, etc. Proteus es capaz de trabajar con los principales compiladores y ensambladores del mercado. (F.J, 2012). 23.
(44) CAPITULO III 3.. PARÁMETROS DE DISEÑO Y CONSTRUCCIÓN DEL TABLERO ELECTRÓNICO-DIGITAL.. 3.1. Normativa de la Fórmula SAE. El reglamento de FSAE no establece parámetros para el diseño del tablero o panel de instrumentos que monitorea todos los parámetros del vehículo de competencia sino que establece normativa sobre la accesibilidad a los controles del vehículo. Regla T4.6. La accesibilidad a los controles Todos los controles del vehículo, incluyendo la palanca de cambios, deben ser operados desde el interior de la cabina sin ninguna parte del conductor, por ejemplo, manos, brazos o los codos, siendo fuera de los planos de la estructura de impacto lateral definido en la Regla T3.25 Estructura de impacto lateral para los coches del marco del tubo y T3.34 Monocasco de impacto lateral. (SAE, 2016) Diseño del tablero electrónico-digital El tablero electrónico digital es diseñado de tal manera que cumpla las características esenciales de ergonomía para el conductor, donde se podrá visualizar con gran exactitud los parámetros que esta nos brinda, con una excelente resolución y datos totalmente confiables y en tiempo real. La culminación del tablero electrónico-digital es una parte fundamental en el vehículo de competencia tipo fórmula SAE que se está construyendo en la Escuela Superior Politécnica de Chimborazo con la ayuda de la Carrera de Ingeniería Automotriz, la ubicación de este componente será trascendental en la manipulación del monoplaza en las diferentes competencias. Parámetros de diseño para la pantalla LCD Las consideraciones que deben tener las pantallas hacen referencia a la dimensión y a las posibilidades de control del contraste, brillo, rotación, e inclinación: 24.
(45) . El usuario debe poder regular la luminosidad y el contraste. . La luminancia de la pantalla no debe ser inferior a 10𝑐𝑑⁄𝑚2 y de los caracteres estará entre 3 y 15 veces la de la pantalla; la relación correcta oscila entre 6:1 y 10:1.. . La altura del borde superior de la pantalla debe ser relacionada con la altura de ojos del conductor y no debería superar la línea horizontal de los ojos.. . Respecto a la pantalla, las de 12 pulgadas son válidas para trabajos ocasionales. Para trabajos de entrada de datos el mínimo es de 14 pulgadas. Las pantallas mayores de 16 pulgadas permiten la visualización de un documento estándar de tamaño DIN A-4 completo. . Siempre que se pueda se optara por pantallas de resolución 72 dpi. Y aspecto ratio 1 (que los pixeles sean cuadrados). . Una frecuencia de centelleo de 70 barridos por segundo (Hz).. . El color de los caracteres negros sobre blancos ofrece mejor contraste que los caracteres blancos sobre fondo negro.. . La forma de los caracteres deben ser bien definidos.. . Los caracteres deben estar bien diseñados (la matriz de pixeles de 7x9 es la preferible, aunque podemos aumentar la matriz a 11x14).. . El tamaño de los caracteres debe ser de 3.5 a 4.5 mm para que su lectura sea fácil a la distancia de 40-70 cm. (BARRAU, 2010) Tabla 6. Dimensiones y espaciamientos de los caracteres en pantalla. D H L. Dimensiones de los caracteres en función de la distancia al ojo (mm) Desde 0 500 800 1250 2000 3150 Hasta 500 800 1250 2000 3150 5000 3 3,5 4,5 6 9 14 2a3 2a 2,5 a 3,5 a 5a9 8 a 14 3,5 4,5 6 25. 5000 8000 23 12 a 23.
Figure


+7




Outline
Documento similar
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Tejidos de origen humano o sus derivados que sean inviables o hayan sido transformados en inviables con una función accesoria.. Células de origen humano o sus derivados que
