Transmisiones flexibles
58
0
0
Texto completo
(2) © Robert Hernández Ortega, Feliberto Fernández Castañeda, István Gómez Ríos, 2016 © Sobre la presente edición: Editorial Feijóo, 2016. Edición y corrección: Claudia María Larrea Marín Estrella Pardo Rodríguez Diagramación y cubierta: Claudia María Larrea Marín. ISBN 978-959-312-201-6. Universidad Central «Marta Abreu» de Las Villas Carretera a Camajuaní km 5,5, Santa Clara, Villa Clara, Cuba. CP 54830.
(3) SÍNTESIS Las transmisiones mecánicas son los mecanismos que se utilizan para transmitir potencia a distancia, generalmente con variación de la velocidad y el momento torsor. De acuerdo al principio de funcionamiento se clasifican en dos grandes grupos: transmisiones por fricción y transmisiones por engranajes. En cada uno de estos grupos se destacan dos formas de transmitir el movimiento: por contacto directo y por enlace flexible. Como enlace flexible se utilizan fundamentalmente correas y cadenas. En este trabajo se muestran los principales aspectos relacionados con el diseño de las transmisiones por correas y cadenas. Se expone además, una metodología de cálculo que permite evaluar o diseñar estos tipos de transmisiones..
(4) ÍNDICE SÍNTESIS .......................................................................................................................... 3 I. Transmisiones por correas .......................................................................................... 5 1.1 Generalidades de las transmisiones por correas ...................................................... 5 1.2. Clasificación y características de los principales tipos de correas ......................... 10 1.3. Cálculo de transmisiones por correas planas y redondas [1] ................................. 11 1.4. Cálculo de transmisiones por correas trapezoidales .............................................. 16 1.5. Ejercicio resuelto ................................................................................................... 25 2. Transmisiones por cadenas ...................................................................................... 33 2.1 Generalidades de las transmisiones por cadenas .................................................. 33 2.2. Parámetros geométricos y cinemáticos de las transmisiones por cadenas............ 34 2.3. Clasificación de las cadenas ................................................................................. 35 2.4. Cadenas de rodillos ............................................................................................... 36 2.5. Lubricación ............................................................................................................ 38 2.6. Variación cordal de la velocidad [1] ....................................................................... 40 2.7. Principales fallas de las transmisiones por cadenas [1] ......................................... 43 2.8. Diseño y evaluación de las transmisiones por cadenas ......................................... 47 2.9. Ejercicio resuelto ................................................................................................... 53 BIBLIOGRAFÍA ............................................................................................................... 58.
(5) I. Transmisiones por correas 1.1 Generalidades de las transmisiones por correas Las transmisiones por correas en su forma más simple constan de dos poleas sobre las cuales se montan las correas con tensión (Figura 1.1). Arco de deslizamiento. F1. V. F1. D1. B. F A. n2. D2. n1 C Arco de deslizamiento. F2. F2. D E. V. a Figura 1.1. Esquema de una transmisión por correas. Los parámetros geométricos fundamentales de una transmisión por correas son (el número 1 se refiere a la polea menor y el número 2 a la mayor): o. Angulo de abrasado ( ). o. (). (1.1). a: Distancia entre centros (mm). D1,2: Diámetros de las poleas (mm). n1,2: Velocidad de rotación (rpm). V: Velocidad lineal de la correa (m/s): (m/s). (1.2). F1: Fuerza en la correa en el ramal conductor (N). F2: Fuerza en la correa en el ramal conducido (N). En la figura 1.2 se muestra la forma en que varía la fuerza en cada sección transversal de la correa. Así, la fuerza (F1) en el ramal conductor (punto A) se compone de la fuerza circunferencial. 5.
(6) Fc debido a la fuerza centrífuga, la fuerza de pretensión inicial F i y el incremento necesario para transmitir el torque útil (. ): (. (1.3). ). Cuando la correa se flexiona (punto B) al pasar por la polea menor, sufre un incremento adicional de la fuerza (Fb1). En este punto actúa la fuerza máxima sobre la correa (F total1). A continuación, durante el recorrido correspondiente al ángulo de abrazado (B-C), la fuerza en la correa disminuye en la magnitud. . En el punto C la correa pasa del estado flexionado al recto, eliminándose el. efecto de la flexión. De esta manera, en el punto D actúa la fuerza F 2. A continuación, la correa se flexiona nuevamente al entrar en la polea mayor (punto E) incrementando la fuerza en la magnitud Fb2. En el recorrido del punto E al F tiene lugar el incremento paulatino de la fuerza en la magnitud Finalmente, en el punto F desaparece el efecto de la flexión resultando la fuerza total en la correa igual a F1.. Figura 1.2. Variación de la fuerza cada sección transversal de la correa [1]. El torque en las poleas conductora y conducida: (. ). (1.4). La relación de transmisión se calcula como la relación de los diámetros de las poleas:. (1.5). La relación de transmisión en las transmisiones por correas no es constante debido al deslizamiento elástico de la correa. Así, la correa pasa del ramal conductor, donde actúa la fuerza F1 al ramal conducido, donde actúa la fuerza F 2. Debido a que F1 es mayor que F2, la correa pasa de un estado de mayor tensión a uno de menor tensión lo que provoca el deslizamiento de la. 6.
(7) correa con respecto a la polea. Se ha comprobado que el deslizamiento de la correa no ocurre sobre todo el ángulo de abrazado, si no en una parte de este. El ángulo donde tiene lugar el deslizamiento elástico se denomina ángulo de deslizamiento. Su magnitud depende de la carga que se transmite (T1,2). Cuando no se transmite carga. el ángulo de deslizamiento es. cero. Asimismo, con el aumento de la carga, aumenta el ángulo de abrazado. Cuando el ángulo de deslizamiento se iguala al ángulo de abrazado tiene lugar el “patinaje” de la correa sobre la polea. Las transmisiones por correas se caracterizan por las siguientes ventajas [4]: . Permiten la transmisión del movimiento a distancias medias, mayores que las transmisiones por engranajes y menores que las transmisiones por cadenas.. . Suavidad del trabajo. Permiten el amortiguamiento de choques.. . Producen menor ruido que otros tipos de transmisiones.. . Permiten trabajar a altas velocidades de rotación.. . Bajo costo.. Las transmisiones por correas se caracterizan por las siguientes desventajas: . Grandes. dimensiones. exteriores,. generalmente. varias. veces. mayores. que. las. transmisiones por engranajes (ver ecuación 1.4). . Inevitabilidad del deslizamiento elástico de la correa y en consecuencia una relación de transmisión no constante.. . Fuerzas elevadas sobre árboles y apoyos ya que la tensión total de ambos ramales es considerablemente mayor que la fuerza circunferencial a transmitir.. . Necesidad de utilizar tensores.. . Necesidad de proteger la correa contra la penetración de aceite.. . Pequeña longevidad de la correa en transmisiones rápidas.. Campo de aplicación: Las transmisiones por correas se utilizan fundamentalmente en el intervalo de potencias de 0,3 kW a 50 kW, raras veces para potencias de más de 300 kW. La relación de transmisión máxima habitualmente alcanza valores de hasta 4 o 5. En general, las transmisiones por correas se utilizan para altas velocidades de rotación y exigencias rigurosas a la suavidad del trabajo [4]. Tensado de las correas: El tensado es la condición necesaria para el trabajo normal de la transmisión por correas. El tensado se alcanza por uno de los siguientes métodos: 1. Desplazando una de las correas.. 7.
(8) Figura 1.3. Tensado con contrapeso [5]. Figura 1.4. Tensado con desplazamiento de una de las poleas [5]. Figura 1.5. Tensado con resorte y rotación de la base de una de las poleas [5] 2. Mediante una polea tensora.. Figura 1.6. Tensado con polea tensora [5] 3. Tensado automático.. 8.
(9) Figura 1.7. Tensado automático [5]. Aquí, la fuerza de tensado es proporcional a la carga en los ramales conductor y conducido de la poleas. Así, la diferencia entre las fuerzas en ambos ramales produce un momento torsor que provoca la rotación de la base que soporta la polea, aumentando de esta forma la fuerza de tensado. En el análisis que se utiliza usualmente, se supone que la fuerza de fricción en la correa es uniforme a lo largo de todo el ángulo de abrazado. Así, la relación entre la fuerza mayor F1 y la fuerza menor F2 es la misma que la que existe entre las fuerzas de un hilo flexible y no elástico que envuelve un cilindro [1]: (1.6) f: Coeficiente de fricción del material de la correa con el material de la polea. La fuerza circunferencial debido a la fuerza centrífuga F c se obtiene de la ecuación: (N) mc: masa de un metro de correa. (1.7). .. La fuerza F1 se compone entonces de los siguientes elementos: (1.8) : Fuerza de pretensión inicial (N). Mientras que la fuerza F2 se compone de los siguientes elementos: (1.9). Al analizar las ecuaciones 1.8 y 1.9 se puede comprobar que. coincide con las. expresiones 1.3 y 1.4. Asimismo, la suma de estas fuerzas da como resultado: (1.10) Considerando las ecuaciones 1.4, 1.6 y 1.10 se obtiene: (1.11). 9.
(10) La ecuación 1.11 ilustra la dependencia entre la fuerza de tensado Fi y la capacidad de carga de la transmisión. Así, si Fi=0, no es posible la transmisión del momento torsor. Ello implica que la fuerza de pretensión debe asegurarse durante toda la vida útil de la transmisión. Considerando la ecuación 1.11, las ecuaciones 1.8 y 1.9 se pueden expresar de la siguiente forma: (1.12). (1.13). Las ecuaciones 1.12 y 1.13 muestran cómo funciona la transmisión por correas (figura 1.8).. Figura 1.8. F1 y F2 en dependencia de Fi [1] La potencia transmitida por la transmisión por correas: (kW). (1.14). 1.2. Clasificación y características de los principales tipos de correas En la tabla 1.1 se resumen los principales tipos de correas así como sus características principales. Tabla 1.1. Características de los principales tipos de correas [1] Tipo de correa. Dimensión principal. Presencia de empalme. Dimensiones. Distancia entre centros. t. Plana. Sí. Sin límite superior. 10.
(11) d. Sí. Sin límite superior. Trapezoidal. No. Limitada. no. Limitada. h. Redonda. Dentada p. 1.3. Cálculo de transmisiones por correas planas y redondas [1] Las correas planas se fabrican de uretano y también de tela impregnada de caucho (o hule) reforzada con alambres de acero o cuerdas de nylon para resistir la carga de tracción. Una o ambas superficies pueden tener un revestimiento superficial con material de fricción. Generalmente las correas planas se compran por material en rollo, se cortan a la medida y se unen utilizando sujetadores especiales proporcionados por el fabricante. En comparación con las correas trapezoidales, las correas planas se caracterizan por una mayor eficiencia. , absorben. mayores vibraciones del sistema y admiten mayores distancias entre centros. No obstante, tienen menor capacidad de tracción y en general trabajan mal en distancias entre centros medias como en los accionamientos de automóviles, generadores eléctricos, etc. Para el diseño de una transmisión por correas planas se consideran los siguientes datos: . Distancia entre centros a o restricciones de espacio o dimensionales.. . Velocidad de rotación de los árboles conductor y conducido n 1 y n2.. . Potencia a transmitir P.. . Tipo de máquina movida y tipo de motor.. El cálculo de las correas planas y redondas se realiza por la siguiente secuencia: 1. Se selecciona el material de la correa y se toman sus características de la tabla 1.2. Se asume un ancho b de la correa por la tabla 1.3. 2. Considerando el diámetro mínimo que se ofrece en las tablas 1.2 y 1.4, se asume D1 y se calcula D2 por la ecuación 5. 3. Se calcula la longitud de la correa: (mm). (1.15). 4. Se calcula la fuerza de tracción admisible de la correa en el ramal conductor: (. ). (1.16). (Fa): Fuerza de tracción admisible de la correa por unidad de longitud a una velocidad de 600 pie/min (3 m/s). Se toma de la tabla 1.2.. 11.
(12) Cp: Coeficiente que considera la influencia del diámetro de la polea menor en la capacidad de carga de la correa. Se toma de la tabla 1.5. Para correas de uretano se toma Cp=1. Cv: Factor de corrección. Se toma de la figura 1.9 para correas de cuero. Para las correas de poliamida y uretano se toma Cv=1. 5. Se calcula el torque que se transmite por la ecuación: (. ). (1.17). : Potencia nominal a transmitir (kW). Ks: Coeficiente que considera el régimen de trabajo. Se toma de la tabla 1.6. : Factor de seguridad. 6. Se calcula la fuerza circunferencial debido a la fuerza centrífuga F c por la ecuación 1.7. 7. Se calcula la magnitud. por la ecuación: (. ). (1.18). (. ). (1.19). 8. Se calcula F2 por la ecuación:. 9. Se calcula la pretensión inicial Fi por la ecuación: (N). (1.20). 1. Se comprueba el coeficiente de fricción f‟ por la ecuación: (1.21). Las poleas deben abombarse para impedir que la correa se salga. Si se le realiza el abombado a una sola polea, debe ser a la más grande. Deben abombarse ambas poleas siempre que los ejes de rotación de las poleas no estén en la posición horizontal. En la tabla 1.7 se recomienda la altura de abombado.. 12.
(13) Tabla 1.2. Características de las correas planas y redondas [1] Dimensiones Material Observ.. („‟). (mm). Dmin.. w f. („‟). (mm). 3. 76. 30. 5,3. 89. 33. 5.8. 114. 41. 7,2. 0.035÷0.045. 970.8÷1248.2. 0.6. 15. 10. 1,8. 0,035. 970,8. c. 1 2,4 2,4. 25 61 61. 35 60 60. 6,1 10,5 10,5. 0,035 0,051 0,037. 970,8 1414,6 1026,3. 4,3. 109. 100. 17,5. 0,042. 1165,0. 9,5 13,5. 241 343. 175 275. 30,7 48,2. 0,039 0,039. 1081,8 1081,8. b=0.5. 5,2. 0,9. b=0.75 b=1.25. 9,8 18,9. 1,7 3,3. 8,3. 1,5. 18,6. 3,3. 970.8÷1248.2. 33,0. 5,8. 74,3. 13,0. cuero. c. 0.035÷0.045. 1 capa. 2 capas. Poliamida. F-0. F-1 c F-2 c A-2 A-3. c c. Redonda. Uretano. A-4 c A-5. 3.3. 6. a. 152. 50. 8,8. 9. a. 229. 60. 10,5. Tabla 1.3. 0,4. 0,5. 0,8. 0,7. 13.
(14) b: Ancho de la correa. (Fa): Fuerza de tracción admisible de la correa por unidad de longitud a una velocidad de 600 pie/min. w: Peso específico de la correa. c : Con recubrimiento de caucho acrylonitrile-butadiene. a : Se adicionan 2” al diámetro mínimo para correas de más de 8” de ancho. Tabla 1.3. Algunos anchos normalizados de las correas planas [1] 8. 10. 15. 16. 20. 25. 30. 32. 40. 50. 75. 100. Tabla 1.4. Diámetros mínimos para correas de uretano [1] Dimensiones de la correa. Tipo de correa. Plana. (“) 0,5x0,062 0,75x0,078 1,25x0,09. Hasta 820 (“) (mm) 0,38 9,7 0,5 12,7 0,5 12,7. 820÷1639 (“) (mm) 0,44 11,2 0,63 16,0 0,63 16,0. 6,4. 1,5. 38,1. 1,75. 44,5. 2. 50,8. 9,5. 2,25. 57,2. 2,62. 66,5. 3. 76,2. 12,7. 3. 76,2. 3,5. 88,9. 4. 101,6. 19,1. 5. 127,0. 6. 152,4. 7. 177,8. (mm) 12,7x1,6 19,1x2 31,8x2,3. 1640÷3280 (“) (mm) 0,5 12,7 0,75 19,1 0,75 19.1. Redonda. *Relación de la velocidad de la polea menor con la longitud de la correa Tabla 1.5. Factor de corrección Cp por el diámetro de las poleas [1] Material. Tipo. Cuero. Polyamida. F-0 F-1 F-2 A-2 A-3 A-4 A-5. 1.6÷4 4.5÷8 9÷12.5 40÷102 114÷204 229÷318 0,5 0,6 0,7 0,95 1 1 0,7 0,92 0,95 0,73 0,86 0,96 0,73 0,86 0,96 -0,7 0,87 --0,71 ----. 14, 16 356, 406 0,8 1 1 1 1 0,94 0,8 0,72. 18÷31,5 457÷800 0,9 1 1 1 1 0,96 0,85 0,77. Más de 31,5 800 1 1 1 1 1 1 0,92 0,91. 14.
(15) Figura 1.9. Factor de corrección Cv para correas de cuero [1]. Tabla 1.6. Coeficiente que considera el régimen de trabajo (Ks) [1] Tipo de motor Motor de combustión Motor Motor eléctrico o interna con transmisión hidráulico turbina mecánica. Tipo de carga Uniforme. (agitadores,. ventiladores,. transportadores con carga ligera y uniforme). 1,0. 1,0. 1,2. 1,2. 1,3. 1,4. 1,4. 1,5. 1,7. Choque moderado (máquinas herramienta, grúas, transportadores pesados, mezcladoras de alimento y molinos) Choque pesado (prensas de troquelado, molinos de martillos, transportadores alternos, accionamientos de molino de rodillos). Tabla 1.7. Altura del abombado de las ruedas [1] D (“) (mm) 1.6, 2, 2.5 41, 51, 64 2.8, 3.15 71, 80 3,55, 4, 4.5 90, 102, 114 5, 5,6 127, 142 6,3, 7,1 160, 180 8, 9 203, 229. Altura (“). (mm). 0,012 0,31 0,016 0,41 0,02 0,51 0,024 0,61. Altura. D (“) (mm) 12.5, 14 318, 356 12.5, 14 318, 356 22.4, 25, 28 569, 635, 711 31,5, 35,5 800, 902 40 1016 45, 50, 56 1143, 1270, 1422. (“) 0,03 0,04. (mm) 0,8 1,0. 0,05. 1,3. 0,06. 1,5. (“) 0,03 0,04 0,05 0,06 0,06 0,08. (mm) 0,8 1,0 1,3 1,5 1,5 2,0. 15.
(16) 1.4. Cálculo de transmisiones por correas trapezoidales Las correas trapezoidales se fabrican de tela con un refuerzo de algodón, rayón o nylon que se impregna de caucho (figura 1.10). En comparación con las correas planas se destacan las siguientes diferencias: . Las correas trapezoidales utilizan poleas ranuradas. Esta circunstancia aumenta el coeficiente de fricción lo que redunda en una mayor capacidad de carga.. . Las distancias entre centros son más cortas. En las correas planas al principio no hay limitación a la distancia entre centros. En las correas trapezoidales, cuando la distancia entre centros es muy grande, la vibración del ramal conducido provoca la abrupta disminución de la vida útil de la correa.. . Son menos eficientes.. . Se fabrican enterizas, de ciertas longitudes por lo que no necesitan empalme.. . Se puede montar más de una correa en la transmisión, regulando así la capacidad de carga.. Figura 1.10. Sección transversal de la correa trapezoidal. Los datos para el diseño de una transmisión por correas son: . Distancia entre centros a o restricciones de espacio o dimensionales.. . Velocidad de rotación de los árboles conductor y conducido n 1 y n2.. . Potencia a transmitir P.. . Tipo de máquina movida y tipo de motor.. 1. Selección o identificación de la correa Se identifica en función de las dimensiones b y h (figura 1.10). Para seleccionar la correa se puede utilizar una de las siguientes variantes: a) En función de P1. En la figura 1.11 se recomiendan los diferentes tipos de correas en función de la velocidad de rotación (rpm) y la potencia (kW) en el árbol menor.. 16.
(17) Figura 1.11. Gráfico para la selección de la correa b) En función de T1 (Tabla 1.8) (1.22). 2. Diámetro de pasos de las poleas (D1 y D2). El diámetro de paso de la polea menor D1 se selecciona de acuerdo a la condición: (mm) El diámetro mínimo. (1.23). se ofrece en la tabla 1.8. Asimismo, el diámetro máximo se calcula. por la siguiente expresión: (mm). (1.24). Es la velocidad lineal máxima que admite la correa. Se toma el menor valor de los que se ofrecen en las tablas 1.8 y 1.9. Se recomienda seleccionar D1 igual a uno de los diámetros básicos indicados en la tabla 1.9 y calcular para cada uno el diámetro máximo, por ejemplo, para la correa z: Para D1=63→. Tabla 1.9. Para D1=80→. Tabla 1.9. El diámetro de pasos de la polea conducida se calcula por la ecuación: (mm). (1.25). Tabla 1.8. Parámetros de las correas trapezoidales Tipo de Correa. b0. b. h. A. Lo 2. Lmin Lmáx D1min. (mm) (mm) (mm) (mm ) (mm) (mm) (mm). (mm). T1 (N·m). qm. Vmáx. (kg/m) (m/s). 17.
(18) Z. 8,5. 10. 6. 47. 1320 400. 2500. 63. Hasta 25. 0,06. 25. A. 11. 13. 8. 81. 1700 560. 4000. 90. 11-70. 0,10. 25. B. 14. 17. 10,5. 138. 2240 800. 6300. 125. 40-190. 0,18. 25. C. 19. 22. 13,5. 230. 3750 1800 10600. 200. 110-550. 0,30. 25. D. 27. 32. 19. 476. 6000 3150 15000. 315. 450-2000. 0,62. 30. E. 32. 38. 23.5. 692. 7100 4500 18000. 500. 1100-4500. 0.90. 30. F. 42. 50. 30. 1170 8400 6300 18000. 800. >2200. SPZ. 8,5. 10. 8. 56. 1600 630. 3550. 63. Hasta 150. 0,07. 40. SPA. 11. 13. 10. 95. 2500 800. 4500. 90. 90-400. 0,12. 40. SPB. 14. 17. 13. 158. 3550 1250 8000. 140. 300-1500. 0,20. 40. SPC. 19. 22. 18. 278. 5600 2000 8000. 224. >1200. 0,37. 40. 30. 18.
(19) Tabla 1.9. Valores de la potencia básica Po para las correas Po (kW). Tipo de Correa. Z. A. B. C. D. SPZ. SPA. SPB. SPC. para velocidades de la correa (m/s). D1 (mm). 5. 10. 15. 20. 25. 30. 63 80 100 112 90 112 140 160 125 140 180 224 200 224 250 280 355 400 450 500 63 80 100 112 90 112 140 160 140 180 200 250 224 250 280 315. 0,49 0,62 0,7 0,78 0,84 1,05 1,23 1,32 1,39 1,61 2,01 2,26 2,77 3,15 3,48 3,78 6,74 7,54 8,24 8,8 1,5 2,34 2,92 3,2 2,57 3,72 4,7 5,17 5 6,7 7,3 8,5 9.4 10,6 11,5 12,8. 0,82 1,07 1,24 1,32 1,39 1,82 2,18 2,35 2,26 2,7 3,51 4,05 4,59 5,35 6,02 6,63 11,4 13 14,4 15,5 1,8 3,06 3,95 4,35 4,88 6,3 7,03 6,37 9,05 10 11,6 12.3 14,2 16,3 17,4. 1,03 1,41 1,67 1,8 1,75 2,39 2,91 3,2 2,8 3,45 4,66 5,45 5,8 6,95 7,94 8,86 14,8 17,2 19,3 21 1,85 3,5 4,72 5,25 5,61 7,56 8,54 10,6 13 14,1 14.1 16,6 18,7 20,9. 1,11 1,6 1,97 2,12 1,88 2,74 3,44 3,8 3,83 5,44 6,5 6,33 7,86 9,18 10,4 16,8 20 22,5 25 3,66 5,2 5,85 5,84 8,25 9,51 11,41 14,9 11,5 17,6 20,5 23,2. 1,65 2,1 2,3 2,82 3,7 4,12 5,76 7,05 7,95 9,6 11,1 17,1 21,1 24,6 27,5 5,35 6,15 8,43 9,94 11,5 15,1 16,8 17,1 20,7 23,9. -. 19.
(20) 3. Velocidad de la correa (V) La velocidad de la correa se calcula por la siguiente ecuación: (m/s). (1.26). La velocidad de funcionamiento óptimo de la correa se considera aproximadamente Vopt≈20 m/s. En el caso general, se debe cumplir la condición: (mm). (1.27). Se toma de la tabla 1.9. Se toma de la tabla 1.9 considerando el valor seleccionado de D1. 4. Distancia entre centros de referencia (a) Se calcula la distancia entre centros de referencia por la siguiente ecuación: (mm). (1.28). Se calcula la distancia entre centros mínima: (mm). (1.29). (mm). (1.30). (mm). (1.31). Se calcula la distancia entre centros máxima:. Aquí también se debe cumplir la condición:. La altura de la correa h se toma de la tabla 1.8.. 5. Longitud de paso de las correas o bandas (L) Se calcula la longitud de paso de la correa por la ecuación: (mm). (1.32). El valor de L se normaliza al más cercano por la tabla 1.10. Tabla 1.10. Algunas longitudes normalizadas de las correas (mm) 400 710 1250 450 800 1400 500 900 1600 560 1000 1800 630 1120 2000 Aquí también se debe cumplir la condición:. 2240 2500 2800 3150 3550 (mm). 4000 4500 5000 5600 6300. 7100 8000 9000 10000 11200. 12500 14000 16000 18000. (1.33). Lmin y Lmax se toman de la tabla 1.8.. 20.
(21) 6. Se calcula la distancia entre centros definitiva de la transmisión: (mm). (1.34). 7. Se calcula y se comprueba el ángulo de abrazado en la polea menor (01): o. (). (1.35). o. Se toma igual a 120 , aunque se admite hasta 90º.. 8. Cálculo de resistencia de las correas Se calcula el número necesario (Nn) de correas por la ecuación: (1.36) [P]: es la potencia que puede transmitir una correa durante un tiempo prolongado: (kW). (1.37). Donde: Po es la potencia básica obtenida en el laboratorio para las siguientes condiciones: . Régimen de carga constante (. . Un turno de trabajo.. . Vida útil alcanzada:. ).. 10000 horas.. Los valores de P0 se ofrecen en la tabla 1.9. La longitud de ensayo de la correa Lo se toma de la tabla 1.8. Los términos. y. consideran las condiciones reales de explotación de las. transmisiones por correas. : Coeficiente que considera la influencia del ángulo de abrasado en la capacidad de carga de la transmisión. Se calcula por la ecuación: (1.38) Para : Coeficiente que considera la longitud de la correa. Se toma de la tabla 1.11.. 21.
(22) Tabla 1.11. Valores de Cl para correa trapezoidal Correa Clásica Estrecha. 0,3 CL. 0,4. 0,5. 0,6. 0,8. 1. 1,2. 1,4. 1,6. 2. 0,79 0,82 0,86 0,89 0,95 0,8 0,85 0,89 0,91 0,96. 1 1. 1,04 1,07 1,10 1,15 1,03 1,06 1,08 1,12. Lo: Longitud de ensayo de la correa. Se toma de la tabla 1.8. Considera la relación de transmisión. Se calcula por la ecuación: (1.39) Variación del torque útil. Se toma de la tabla 1.12. Para Tabla 1.12. Valores de Tu en N·m. Correa. 1,08-1,13 1,14-1,19 1,2-1,3 1,31-1,4 1,41-1,6 1,61-2,39. 2,4. Z. 0,15. 0,23. 0,3. 0,35. 0,38. 0,4. 0,5. A. 0,4. 0,6. 0,8. 0,9. 1. 1,1. 1,2. B. 1,1. 1,6. 2,1. 2,3. 2,6. 2,9. 3,1. C. 2,78. 4,3. 5,8. 6,6. 7,3. 8. 9. D. 9,94. 15,4. 21. 23. 26. 28,4. 31,9. SPZ. 0,6. 0,9. 1,2. 1,4. 1,5. 1,7. 1,8. SPA. 1,4. 2,1. 2,8. 3,1. 3,5. 3,8. 4,2. SPB. 2,65. 3,97. 5,3. 5,96. 6,63. 7,29. 8. SPC. 5,3. 10. 14. 16. 17,6. 19,4. 21. K. 0,2. 0,3. 0,44. 0,5. 0,55. 0,6. 0,7. L. 1,8. 2,7. 3,6. 4. 4,5. 5. 5,4. M. 13,8. 20,7. 27,6. 31. 34,5. 38. 41,4. Ks: Coeficiente que considera el régimen de trabajo. Se toma de la tabla 1.13. Para el régimen de trabajo constante en un turno de trabajo. 22.
(23) Tabla 1.13. Coeficiente KS para un turno de trabajo [4] Régimen de Trabajo Generadores Ligero (120% SC). Tipo de Máquina eléctricos, ventiladores, bombas. KS y. compresores. centrífugos, transportadores por cinta, máquinas de corte continuo:. 11,2. tornos, taladradoras y rectificadoras. Bombas y compresores de pistón con tres y más cilindros,. Medio (150% SC). transportadores por elementos de acero articulados y máquinas 1,11,3 automáticas. Mandos reversibles, máquinas cepilladoras y ranuradoras, bombas y. Pesado (200% SC). compresores de pistón con uno o dos cilindros, transportadores sin fin y elevadores,. prensas. de. tornillo. y. excéntricas. con. volantes. 1,21,4. relativamente pesados. Muy Pesado (300% SC). Elevadores, excavadoras, dragas, prensas de tornillo y excéntricas con 1,31,5. volantes relativamente ligeros, martillos y molinos.. Para dos turnos se incrementa KS en 0,15 ;. Para tres turnos se incrementa KS en 0,4. Si el número necesario de correas es mayor que 1, se debe considerar la distribución irregular de la carga entre las correas con el coeficiente Cn. (1.40) Cn: Coeficiente que tiene en cuenta la distribución irregular de la carga entre las correas. Se toma de la tabla 1.14. Tabla 1.14. Coeficiente Cn Tipo de Correa. Trapezoidales. Correas. Número de. necesarias. correas. Nn ≤ 1. N=1. 1. 1 < Nn 2,85. 1<N3. 0,95. 2.85 < Nn 5,7. 3 < Nn 6. 0,9. Nn > 5,7. Nn > 6. 0,85. Cn. El número de correas N se redondea a un valor entero. Se considera el número máximo de correas igual a 12. Una cantidad mayor no permite obtener un aumento significativo en la capacidad de carga de la transmisión debido a la distribución irregular de la carga entre las correas.. 23.
(24) 9. Pretensión de las correas. 0 :. 1, 6 ÷ 2 para las correas clásicas (MPa). 2 para las correas estrechas. (1.41). es la fuerza producida en la correa debido a la pretensión inicial (1.42) Es la masa de un metro de la correa. Se toma de la tabla 1.8.. 10. Se calcula la fuerza sobre los apoyos por la ecuación: (N). (1.43). 11. Se determinan los principales parámetros geométricos de la polea por la tabla 1.15, la figura 1.12 y las ecuaciones siguientes: (mm). (1.44). (mm). (1.45). (mm). (1.46). Figura 1.12. Dimensiones de las poleas. 24.
(25) Tabla 1.15. Dimensiones de las ranuras Tipo de Correa H t S r1 r2 x. Z. A. B. C. D. E. SPZ. SPA. SPB. SPC. 2,5. 3,3. 4,2. 5,7. 8,1. 9,6. 2,5. 3,3. 4,2. 5,7. 9,5 12 8 0,5 1 6. 12 15 10 1 1 7,6. 15 19 12,5 1 1,6 9,6. 20 25,5 17 1,6 2. 28 37 24 2 3. 33 44,5 29 2 4. 12,5 12 8 0,5 1 6. 16,3 15 10 1 1 7,6. 21,2 19 12,5 1 1,6 9,6. 25,5 17 1,6 2. 90,01 11,60,015 14,70,015 200,015 28,50,01 33,80,015 90,01 11,60,015 14,70,015 20 D 63-71 90-112 125-160 63-71 90-112 125-160 =34 b1 10 13 16,6 10 13 16,6 D 80-100 125-160 180-224 200-315 315-450 500-560 =36 b1 10,1 13,1 16,7 22,7 32,3 38,2 80D 112-160 180-400 250-500 355-630 500-900 630-1120 125-160 180-224 100 =38 b1 10,2 13,3 16,7 22,9 32,6 38,6 10,2 13,3 16,7. 0,015. d. El ángulo de la ranura de la polea se realiza algo menor que el ángulo de la correa para mejorar la fricción.. 1.5. Ejercicio resuelto Se necesita diseñar un sistema de accionamiento mecánico que contiene una transmisión por engranajes cilíndricos cerrada, una transmisión por correa y una de cadenas. La máquina movida es un transportador de banda que demanda una potencia P=35,29 kW y una velocidad n = 80 rpm. La máquina trabaja un turno de trabajo por tiempo indefinido.. 1.5.1. Análisis cinemático y selección del motor nI=nMot=1775 r.pm. PI=41,2 kW PMot=45 kW. nIII=240 r.pm. PIII=37,15 kW. nIV=nMaq=80 r.pm. PIV=PMaq=35,29 kW. nII=600 r.pm. PII=38,3 kW. 25.
(26) Figura 1.13. Esquema cinemático Se toman los valores de relación de transmisión y de eficiencia para cada una de las transmisiones de acuerdo a los valores que a continuación se recomiendan:. En ningún caso se utilizará una relación de transmisión igual o menor que 1.. Potencia en cada árbol Para el cálculo de la potencia en cada árbol se parte de la potencia que demanda la máquina, o sea el cálculo se comienza en el árbol de entrada del transportador. Se calcula la potencia demandada en el árbol de salida del reductor (árbol de entrada de la transmisión por cadenas):. Se calcula la potencia demandada en el árbol de entrada del reductor (árbol de salida de la transmisión por correas):. Se calcula la potencia demandada en el árbol de entrada de la transmisión por correas (árbol del motor):. Con el valor de potencia demandada en el árbol de entrada de la transmisión se selecciona en el catálogo un motor eléctrico cuya potencia nominal sea mayor nominal sea menor que la máxima posible. y cuya velocidad. . Para ello se calcula la relación de. transmisión máxima posible utilizando las tres transmisiones:. Y la velocidad nominal del motor máxima posible:. La relación de transmisión mínima posible:. 26.
(27) La relación de transmisión mínima posible de la transmisión por engranajes se toma de la serie de valores normalizados de la página 306 de la referencia [4]. Preliminarmente, se toma .. 1ra serie 2da serie La velocidad nominal del motor mínima posible:. Se selecciona en la tabla 1.16 el motor con potencia nominal de 45 kW y velocidad de 1775 rpm. Tabla 1.16. Algunos valores de potencia y velocidad de los motores eléctricos Potencia (kW) 0,12 0,18 0,25 0,37 0,55 0,75 1,1 1,5 2,2 3 3,7 4,5. Velocidad (r.p.m.) 3400 3370 3340 3340 3370 3380 3330 3350 3450 3450 3480 3465. 1720 1710 1710 1680 1680 1720 1710 1730 1720 1710 1710 1750. 800 840 840 835 825 825 850 850 855 855 855 880. Potencia (kW) 5,5 7,5 9,2 11 15 18,5 22 30 37 45 55 75. Velocidad (r.p.m.) 3485 3515 3520 3520 3530 3530 3535 3545 3550 3560 3560 3560. 1740 1755 1755 1755 1765 1765 1760 1770 1770 1775 1775 1775. 880 880 875 875 875 880 885 885 880 880 885 890. Potencia (kW) 90 110 132 150 185 200 220 260 300 330 370 400. Velocidad (r.p.m.) 3575 3575 3575 3575 3575 3580 3580 3580 3580 3585 3585 3585. 1780 1785 1790 1790 1790 1790 1790 1790 1790 1790 1790 1790. 890 890 890 890 895 895 895 895 895 -. Cálculo de las velocidades en cada árbol. Se selecciona la relación de transmisión de la transmisión por engranajes de la serie de números preferidos de la página 306 de la referencia [4]. Se selecciona. y para la transmisión por cadenas se toma. . De esta forma. la relación de transmisión de la transmisión por correas:. La velocidad en el árbol de entrada de la transmisión (árbol del motor):. La velocidad en el árbol de salida de la transmisión por correas (árbol de entrada del reductor):. 27.
(28) La velocidad en el árbol de salida del reductor (árbol de entrada de la transmisión por cadenas):. La velocidad en el árbol de salida de la transmisión por cadenas (árbol de entrada del transportador):. 1.5.2. Cálculo de la transmisión por correa 1. Selección de la correa:. Con el valor del torque obtenido se selecciona, en la tabla 1.1, la correa tipo. C la cual. se. recomienda utilizar en el intervalo: T= (110…..550)N.m. 2. Diámetro de paso de las poleas D1 y D2. Se debe cumplir la condición: D1min ≤ D1 ≤ D1max Para la correa tipo C se toma, en la tabla 1.8, el valor mínimo del diámetro de la polea conductora recomendado por el fabricante: D1min=200 mm. El valor máximo del diámetro se calcula por la siguiente ecuación:. La velocidad máxima de la correa recomendada por el fabricante también se toma de la tabla 1.9: Vmáx=25 m/s De esta forma, teniendo en cuenta el intervalo: 200. 269 y los valores de diámetros. preferidos que se recomiendan en la tabla 1.9 se selecciona D1=224 mm. Se calcula el diámetro de pasos de la polea conducida:. 3. Velocidad de la correa (V) La velocidad de la correa se calcula por la siguiente ecuación:. El valor de velocidad obtenido está cerca del valor óptimo que es aproximadamente Vopt≈20 m/s. La velocidad mínima se toma de la tabla 1.9:. 28.
(29) La velocidad máxima se toma de la tabla 1.9 para D1=224 mm Así, se cumple la condición:. 4. Distancia entre centros de referencia (ar) Se calcula la distancia entre centros de referencia por la siguiente ecuación:. Se asume: a=690 mm. Se calcula la distancia entre centros mínima:. La altura de la correa se toma de la tabla 1.8: h=13,5 mm. Se calcula la distancia entre centros máxima:. 5. Se calcula la longitud de paso de las correas (L):. Se asume, de la tabla 1.10, la longitud más cercana: L=2800 mm. Se comprueba la condición: Lmin < L < Lmax Los valores de Lmin y Lmax se toman de la tabla 1.8: Lmin=1800 Lmax=10600 6. Se calcula la distancia entre centros definitiva de la transmisión:. 29.
(30) 7. Se calcula y se comprueba el ángulo de abrazado en la polea menor. :. 8. Cálculo de resistencia de las correas Se calcula la potencia que puede transmitir una correa durante un tiempo prolongado por la ecuación:. La potencia básica Po se obtiene de la tabla 1.9, para lo que es necesario interpolar:. El coeficiente que tiene en cuenta la influencia del ángulo de abrazado:. El coeficiente que tiene en cuenta la influencia de la longitud de la correa (C L) se obtiene interpolando de la tabla 1.11 a partir de la relación:. L0 se obtiene de la tabla 1.8: L0=2240mm. La variación de la potencia útil se obtiene de la expresión:. Donde la variación del torque útil. se obtiene de la tabla 1.12 a partir de la relación de. transmisión:. De esta forma:. Así, la potencia que puede transmitir una correa durante un tiempo prolongado:. El coeficiente que tiene en cuenta el régimen de trabajo Ks se toma de la tabla 1.13: Ks =1,1 El número de correas necesarias:. 30.
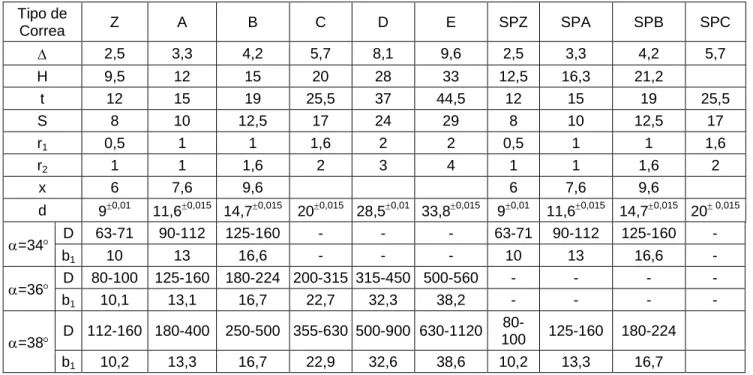
(31) Finalmente el número de correas, teniendo en cuenta la distribución irregular de la carga entre estas:. El coeficiente que tiene en cuenta la distribución irregular de la carga entre las correas C n se obtiene de la tabla 1.14: Cn=0,9 9. Pretensión de la correa En una correa la fuerza de pretensión necesaria para transmitir la potencia requerida por la máquina movida se calcula por la siguiente expresión:. Donde qm es la masa de un metro de correa que se encuentra en la tabla 1.8: qm = 0.3 Kg/m Se calcula la tensión en cada correa debido a la fuerza de pretensión:. Ac es el área de la sección transversal de la correa seleccionada. Se toma de la tabla 1.8: Ac=230 2. mm . Se comprueba que el valor de. es mayor que el valor mínimo 1,6 MPa exigido para las correas. clásicas.. 10. Se calculan las fuerzas (R) sobre los árboles debido a la fuerza de pretensión:. 11. Se determinan los principales parámetros geométricos de la polea por la tabla 1.15, la figura 1.12 y las ecuaciones siguientes:. 31.
(32) 20. 20. 22,9. Ø235,4. Ø674,1. 38°. 161,5. a) Polea conductora. 161,5. b) Polea conducida. Figura 1.14. Dimensiones de las poleas. 32.
(33) 2. Transmisiones por cadenas 2.1 Generalidades de las transmisiones por cadenas El caso más simple de transmisión por cadena se compone de dos sprockets y una cadena (figura 2.1). Aquí, el elemento flexible posee una masa significativa lo que limita la velocidad de funcionamiento.. Figura 2.1. Esquema de una transmisión por cadena En comparación con otras transmisiones mecánicas, las transmisiones por cadenas se destacan por las siguientes ventajas [2]: . Pueden utilizarse a considerables distancias entre centros, hasta 5 m.. . Alta eficiencia, que puede alcanzar hasta 0,96÷0,98.. . Producen menos carga sobre los árboles y apoyos que las transmisiones por correas.. . Posibilidad de transmitir el movimiento a varios árboles con una sola cadena.. . Menores dimensiones exteriores que las transmisiones por correas.. . Menor variación de la relación de transmisión en comparación con las transmisiones por correas.. . Fácil montaje y desmontaje de la cadena por medio del eslabón de cierre.. . Mayor capacidad de carga que las transmisiones por correas.. Entre las desventajas se pueden mencionar: . Costo relativamente elevado.. . Cierta irregularidad durante el funcionamiento.. . Exigen mayor precisión en el montaje de los árboles que las transmisiones por correas.. . Exigen lubricación.. . Producen ruido. Campo de aplicación. Las transmisiones por cadenas han adquirido mayor difusión para potencias de hasta 100 kW. Raras veces se utilizan potencias superiores a esa cifra pues la transmisión resulta muy costosa. La relación de transmisión máxima a que se deben utilizar es 6. Mayores relaciones de transmisión pueden ser utilizadas aunque se limita considerablemente la vida útil de la cadena. La velocidad. 33.
(34) lineal de la cadena no debe superar los 15 m/s. Las transmisiones por cadenas se utilizan en máquinas agrícolas, bicicletas, máquinas herramienta, en los accionamientos de las máquinas de transporte continuo, etc. En general se utilizan en la zona de bajas velocidades del sistema de accionamiento.. 2.2. Parámetros geométricos y cinemáticos de las transmisiones por cadenas Los principales parámetros geométricos de las transmisiones por cadenas se muestran en la figura 2.2. Ellos son: t: Paso de la cadena (mm). a: Distancia entre centros (mm). z1,2: Número de dientes de los sprockets conductor y conducido. D1,2: Diámetro de pasos de los sprockets conductor y conducido (mm). n1,2: Velocidad de rotación de los sprockets conductor y conducido (rpm). o. : Arco de engranaje en el sprocket conductor ( ). o. Paso angular del sprocket ( ). v: Velocidad lineal de la cadena (m/s). Aquí y en lo adelante, el número 1 se refiere al sprocket menor, mientras que el número 2 se refiere al mayor. La relación de transmisión de las transmisiones por cadenas se calcula por la siguiente expresión: (2.1). ramal conductor. t. V Fcad. Fcad 1. n2. D2. D. n1 F=0 ramal conducido. V. a Figura 2.2. Parámetros geométricos de las transmisiones por cadenas. 34.
(35) 2.3. Clasificación de las cadenas Según su aplicación las cadenas se dividen en tres grupos: 1. Cadenas de carga. 2. Cadenas de tracción. 3. Cadenas impulsoras. Las cadenas de carga (figura 2.3 a y b) se utilizan para elevar, suspender y bajar grandes cargas a bajas velocidades (menos de 0,25 m/s). Se fabrican de eslabones redondos o de bridas sencillas.. a) De eslabones redondos. d) De rodillos y una hilera. g) Vaucanson. b) De bridas simples. c) De bridas. e) De rodillos y dos hileras. h) Dentadas. f). i). De casquillos. De rodillos con bridas curvas. Figura 2.3. Tipos principales de cadenas [5]. Las cadenas de tracción (figura 2.3 c) son de gran paso y longitud. Trabajan a velocidades medias, de 2 a 4 m/s. Se utilizan como órgano de tracción en las máquinas de transporte continuo. Se componen de bridas de forma sencilla y ejes con casquillos o sin estos. También se pueden considerar de tracción las cadenas abiertas o Vaucanson (figura 2.3 g) con eslabones estampados. Las cadenas impulsoras se utilizan en los sistemas de accionamiento de las máquinas para la transmisión del movimiento mecánico. Trabajan a grandes velocidades y se ejecutan de pasos pequeños para reducir las cargas dinámicas. Se fabrican de materiales resistentes al desgaste para asegurar la vida útil necesaria. Sus principales características geométricas son el paso y el ancho. Asimismo la principal característica de fuerza es el esfuerzo de rotura. Según normas internacionales el paso se selecciona múltiplo de una pulgada (25,4 mm). A este grupo pertenecen: . Las cadenas de eslabones redondos (figura 3.3 a). La particularidad fundamental de estas cadenas en su función impulsora reside en que tienen movilidad en dos planos.. 35.
(36) . Las cadenas de casquillos (figura 2.3 f). Son una variante económica de las cadenas de rodillos, pero sin este último elemento. Se utilizan en motocicletas y automóviles.. . Las cadenas dentadas (figura 2.3 h). Los eslabones se componen de un juego de bridas. En comparación con las cadenas de rodillos admiten mayor velocidad de funcionamiento y producen menos ruido. También se destacan por una fiabilidad elevada. No obstante son más pesadas y costosas.. . Las cadenas Vaucanson (figura 2.3 g). Se componen de eslabones iguales y no requieren por tanto ninguna pieza auxiliar. Trabajan a bajas velocidades (menos de 3 m/s), generalmente en condiciones de lubricación imperfectas. Se utilizan en la construcción de maquinaria agrícola.. . Las cadenas de rodillos con bridas curvas (figura 2.3 i). Se arman de eslabones iguales. Debido a que las bridas trabajan a flexión estas cadenas tienen un buen desempeño en presencia de cargas dinámicas.. . Las cadenas de rodillos (figura 2.3 d y e). Son el tipo de cadena de mayor aplicación en el accionamiento de máquinas por lo que se abordan con más detalle en este trabajo.. 2.4. Cadenas de rodillos Las cadenas de rodillos (figura 2.4) se ejecutan de eslabones cada uno de los cuales se compone de dos bridas montadas a presión sobre dos ejes (eslabón exterior) o dos casquillos (eslabón interior). Los casquillos de los eslabones interiores se montan sobre los ejes de los eslabones exteriores. Así, los eslabones exteriores e interiores se alternan en la cadena. Sobre los casquillos se colocan los rodillos cuya función es sustituir la fricción por deslizamiento por la fricción por rodamiento entre los dientes de la rueda y la cadena.. h. ejes. bridas. Eslabón exterior casquillos. b. rodillos. bridas. dr Eslabón interior. t. t. t. Figura 2.4. Elementos de las cadenas de rodillos. 36.
(37) Los extremos de la cadena se unen por eslabones de cierre como el que se muestra en la figura 2.5 b). En caso de necesitar una cadena con número impar de eslabones se emplea un eslabón de transición como el que se muestra en la figura 2.5 a), aunque es necesario destacar que su resistencia es bastante menor que el resto de los eslabones. En caso de cargas elevadas, para evitar el uso de pasos grandes, se utilizan cadenas de múltiples hileras (figura 2.3 e). Estas cadenas se componen de los mismos elementos que las ordinarias solo que los ejes son de una mayor longitud. El número de hileras se selecciona generalmente de 2 a 4. Los materiales de los elementos de la cadena deben tener elevada resistencia mecánica y resistencia al desgaste lo que se obtiene empleando aceros aleados y al carbono sometidos a tratamiento térmico. En la tabla 2.1 se resumen las características fundamentales de los aceros que se utilizan en la fabricación de los elementos de las cadenas.. a) Eslabón de cierre de transición. b) Eslabón de cierre. Figura 5. Eslabones de cierre. Tabla 2.1. Características de los aceros utilizados en la fabricación de las cadenas de rodillos [4]. Elemento. C (%). Bridas. 0,4÷0,5. Pasadores y casquillos. 0,2. Rodillos. 0,6. Si (%). Mn (%). S, P (%). 0,2< 0,8<. 0,2÷1 0,2<. 0,04<. Cr (%). Dureza HRC. 1<. 35÷45. --. 54÷62. 1. 47÷55. Las cadenas de rodillos han sido normalizadas por la ANSI (American National Standard Institute). En las figuras 2.4 y 2.6, así como en la tabla 2.2 se muestran las dimensiones y características. 37.
(38) principales. Estas cadenas se fabrican de una y varias hileras y tienen una designación o número de tamaño del 40 al 240. Los dígitos indican el paso de la cadena en octavos de pulgadas, por ejemplo la cadena número 100 tiene un paso de. pulgadas. Si la designación incluye el. sufijo H por ejemplo 60H, significa que las dimensiones estándar son las mismas solo que las placas laterales son más gruesas. Además están los tamaños menores y más ligeros 25, 35, 41, etc.. 2.5. Lubricación La lubricación de las cadenas de rodillos es esencial para obtener una vida útil lo suficientemente larga. Debe ser utilizado un aceite mineral de tipo ligero o medio, sin aditivos. Excepto en condiciones especiales no se recomiendan las grasas y aceites pesados debido a que son demasiado viscosos para que puedan penetrar bien en los pequeños intersticios de los eslabones y pasadores de la cadena.. 38.
(39) Tabla 2.2. Dimensiones de cadenas de rodillos estándares (fabricación estadounidense) [1]. Número ANSI. 25. 35. 41. 40. 50. 60. 80. 100. 120. 140. 160. 180. 200. 240. Paso (t) Ancho (b). Resistencia mínima a la tracción. Peso promedio. Distancia Diámetro del entre hileras rodillo (dr) (A). Pulgadas Pulgadas. Libras. Libras/pies. Pulgadas. Pulgadas. mm. mm. N. N/m. mm. mm. 0,250. 0,125. 780. 0,09. 0,130. 0,252. 6,35. 3,18. 3470. 1,31. 3,30. 6,40. 0,375. 0,188. 1760. 0,21. 0,200. 0,399. 9,52. 4,76. 7830. 3,06. 5,08. 10,13. 0,500. 0,25. 1500. 0,25. 0,306. -. 12,70. 6,35. 6670. 3,65. 7,77. -. 0,500. 0,312. 3130. 0,42. 0,312. 0,566. 12,70. 7,94. 13920. 6,13. 7,92. 14,38. 0,625. 0,375. 4880. 0,69. 0,400. 0,713. 15,88. 9,52. 21700. 10,1. 10,16. 18,11. 0,750. 0,500. 7030. 1,00. 0,469. 0,897. 19,05. 12,7. 31300. 14,6. 11,91. 22,78. 1,00. 0,625. 12500. 1,71. 0,625. 1,153. 25,40. 15,88. 55600. 25,0. 15,87. 29,29. 1,250. 0,750. 19500. 2,58. 0,750. 1,409. 31,75. 19,05. 86700. 37,7. 19,05. 35,76. 1,500. 1,000. 28000. 3,87. 0,875. 1,789. 38,10. 25,40. 124500. 56,5. 22,22. 45,44. 1,750. 1,000. 38000. 4,95. 1,000. 1,924. 44,45. 25,40. 169000. 72,2. 25,40. 48,87. 2,000. 1,250. 50000. 6,61. 1,125. 2,305. 50,80. 31,75. 222000. 96,5. 28,57. 58,55. 2,250. 1,406. 63000. 9,06. 1,406. 2,592. 57,15. 35,71. 280000. 132,2. 35,71. 65,84. 2,500. 1,500. 78000. 10,96. 1,562. 2,817. 63,50. 38,10. 347000. 159,9. 39,67. 71,55. 3,00. 1,875. 112000. 16,4. 1,875. 3,458. 76,70. 47,63. 498000. 239. 47,62. 87,83. 39.
(40) 2.6. Variación cordal de la velocidad [1] En la figura 2.6 se muestra un piñón que impulsa una cadena de transmisión a favor de las manecillas del reloj. Del análisis de la figura se puede escribir: (2.2). (º). (2.3). Considerando las ecuaciones 2.2 y 2.3, los diámetros primitivos de los sprocket D1 y D2 se puede escribir de la forma: (mm). (2.4). t t. ω. 2. . A. Variable. D1. B. Figura 2.6. Endentado de una cadena y su piñón El ángulo. a que gira el eslabón a medida que entra en contacto se denomina ángulo de. articulación. Se puede observar en la ecuación 2.3 que su magnitud es función del número de dientes. La rotación del eslabón según este ángulo ocasiona impacto entre los rodillos y los dientes del piñón y produce desgaste en las articulaciones de la cadena. Debido a que la duración de una transmisión seleccionada apropiadamente es función del desgaste y la resistencia a la fatiga en la superficie de los rodillos es importante reducir este ángulo tanto como sea posible. El número de dientes también afecta la relación de transmisión durante la rotación (figuras 2.6, 2.7 y 2.8). En la posición mostrada en la figura 2.6 y en la posición 1 de las figuras 2.7 y 2.8, el tramo AB de la cadena es tangente a la circunferencia de paso del piñón. Sin embargo, cuando este gira. 40.
(41) en un ángulo. , el tramo AB de la cadena se mueve más cerca del centro de rotación del piñón. como se muestra en la posición 2 de las figuras 2.7 y 2.8. Esto significa que AB se mueve hacia arriba y hacia abajo lo que origina una velocidad no uniforme en la cadena. Este movimiento ocasiona cargas de impacto entre el rodillo y los dientes de la rueda incrementando el deterioro de los elementos de la transmisión.. 1. D1. 2. D1cos( /2). /2. Vmin Vmax. A. B. Figura 2.7. Variación de la velocidad de la cadena para. 1. 2. γ cos 2 2. D1. D. 1. Vmin Vmax. A. B. Figura 2.8. Variación de la velocidad de la cadena para. La velocidad máxima de salida de la cadena, posición 1 de la rueda, es:. Considerando la ecuación 2.4, la expresión 2.5 resulta:. 41.
(42) La velocidad mínima de salida, posición 2 es:. Considerando nuevamente la ecuación 2.4, la velocidad mínima resulta:. La velocidad nominal de la cadena v se define como el número de unidades de longitud que sale del sprocket por unidad de tiempo:. La variación cordal de la velocidad se conoce como:. Considerando las ecuaciones 2.6, 2.8 y 2.9 se obtiene:. En la tabla 2.3 se muestran los valores de la variación cordal de la velocidad. para diferentes. valores del número de dientes del piñón. Asimismo, en la figura 2.9 se muestra la representación gráfica. Tabla 2.3. Variación de la velocidad en función de Número de dientes. 8. % de variación de la velocidad. 7,6. 10 4,9. 12 3,4. 14 2,5. 16 1,9. 18 1,5. 20 1,2. 22. 24. 1,0. 0,9. Figura 2.9. Variación de la velocidad en función de z1 [1]. 42.
(43) Cuando se utilizan transmisiones por cadenas para regular o sincronizar procesos de precisión debe considerarse estas variaciones. Tales cambios pueden originar vibraciones dentro del sistema. Aunque desde este punto de vista es deseable un número de dientes grande en la rueda impulsora, en el caso usual es ventajoso obtener un piñón lo más pequeño posible y esto requiere un número de dientes pequeño. En el caso de una operación uniforme a velocidades moderadas y altas se considera buena práctica utilizar una rueda impulsora con por lo menos 17 dientes. Un número mayor, por ejemplo, 19 o 21 daría una mejor expectativa de vida útil y menor ruido en la cadena. Donde las limitaciones de espacio son importantes o para velocidades muy bajas, pueden utilizarse números de dientes más pequeños sacrificando la expectativa de duración de la cadena.. 2.7. Principales fallas de las transmisiones por cadenas [1] Las cadenas de rodillos rara vez fallan debido a falta de resistencia a la tracción, con más frecuencia se inutilizan por haber sido sometidas a muchas horas de servicio. La capacidad de transmisión de potencia de las cadenas tiene en cuenta tres modos de fallas: . Fatiga de las bridas de los eslabones debido a la aplicación repetida de las cargas en el lado tenso de la cadena. Es la falla que domina a velocidades bajas y moderadas.. . El impacto de los rodillos al engranar con los dientes de las ruedas. Es la falla que domina a altas velocidades.. . La abrasión o desgaste entre los ejes de cada eslabón y sus casquillos (figura 2.4).. En la tabla 2.4 se muestran las capacidades de potencia de las cadenas de rodillos para diferentes velocidades. Estas fueron obtenidas mediante ensayos de laboratorio para las siguientes condiciones: . 15000 horas de trabajo a plena carga.. . Carga constante.. . Una hilera.. . Dimensiones por la ANSI.. . Longitud de la cadena igual a 100 pasos.. . Lubricación recomendada.. . Disposición horizontal de los árboles.. . Dos ruedas de 17 dientes.. . Se admite una máxima elongación de la cadena de 3 %.. En condiciones reales de explotación las condiciones anteriores generalmente no se cumplen. Por esta razón los valores de potencia que se indican en la tabla 2.4 necesitan ser corregidos. Para ello se utilizan los siguientes coeficientes: . El factor de corrección por el número de dientes. . Este coeficiente considera que la. rueda impulsora puede tener un número de dientes diferente de 17. Se toma de la tabla 2.5.. 43.
(44) . El factor de corrección por el número de hileras. . Este coeficiente considera que la. potencia nominal no está relacionada linealmente con el número de hileras, o sea, la carga no se distribuye uniformemente entre las hileras. Se toma de la tabla 2.6. . El factor de servicio. que considera las variaciones de potencia en las máquinas. impulsora e impulsada. Se toma de la tabla 2.7.. La potencia necesaria se determina como sigue:. Donde: n: Factor de seguridad. Se toma de la tabla 2.8. : Potencia demandada por la máquina accionada en el sprocket menor. 44.
(45) Tabla 2.4. Potencia admisible. en kW para cadenas de rodillos de paso sencillo y una hilera con rueda conductora de 17 dientes [1]. 50. 25 35 40 41 50 0,04 0,1 0,3 0,1 0,5. Número de la cadena (ANSI) 60 80 100 120 140 160 0,9 2,1 4,1 7,0 10,7 15,6. 100. 0,1 0,2 0,5 0,3 1,0. 1,7. 4,0. 7,7. 13,0 20,1. 29,2. 40,3. 53,4. 85,8. 150. 0,1 0,3 0,7 0,4 1,4. 2,5. 5,8. 11,0 18,7 28,9. 42,0. 57,9. 76,8. 123,8. 200. 0,1 0,4 1,0 0,5 1,9. 3,2. 7,5. 14,3 24,2 37,5. 54,4. 75,3. 99,9. 160,3. 300. 0,2 0,6 1,4 0,8 2,7. 4,6. 10,8 20,7 34,9 54,0. 78,3. 108,1. 143,9. 231,2. 400. 0,2 0,8 1,8 1,0 3,5. 6,0. 13,9 26,8 45,2 69,9 101,4 140,2. 185,7. 267,7. 500. 0,3 0,9 2,2 1,2 4,3. 7,3. 17,1 32,7 55,3 85,8 123,8 152,1. 165,5. 0,0. 600. 0,3 1,1 2,6 1,4 5,0. 8,7. 20,1 38,6 65,1 94,7 105,1 115,6. 126,0. -. 700. 0,4 1,3 3,0 1,6 5,8. 9,9. 23,1 44,3 66,4 75,3. 83,5. 91,7. 0,0. -. 800 900 1000. 0,4 1,4 3,3 1,8 6,5 0,5 1,6 3,7 2,0 7,2 0,5 1,7 4,1 2,2 8,0. 11,2 26,1 47,0 54,3 61,4 12,5 29,8 39,4 45,5 51,5 13,6 28,1 33,6 38,9 44,0. 68,4 57,3 48,9. 75,3 62,9 53,8. -. -. 1200 1400. 0,6 2,0 4,8 2,5 9,4 16,1 21,4 25,6 29,5 33,5 0,7 2,3 5,5 1,9 10,7 13,5 16,9 20,3 23,5 26,5. 37,2 0,0. 0,0 -. -. -. 1600. 0,8 2,6 6,2 1,6 9,5. 11,0 13,9 16,6 19,2. 0,0. -. -. -. -. 1800 2000. 0,9 2,9 6,7 1,3 8,0 0,9 3,2 5,8 1,1 6,9. 9,2 7,9. 11,6 13,9 16,1 9,9 11,9 0,0. -. -. -. -. -. 2500. 1,2 3,9 4,1 0,8 4,9. 5,6. 7,1. 0,3. -. -. -. -. -. -. 3000 1,4 4,2 3,1 0,6 3,7 4,3 5,4 Tipo A Tipo B Tipo C Tipo A: Lubricación manual o por goteo.. 0,0. -. -. -. -. -. 180 21,6. 200 28,6. 240 46,1. Tipo C‟. Tipo B: Con lubricación por inmersión en baño de aceite. Tipo C: Lubricación con chorro de aceite. Tipo C¨: Igual al anterior solo que el diseño debe someterse a la evaluación del fabricante.. Tabla 2.5. Factor de corrección por el número de dientes de la rueda impulsora [1] 11 12 13 14 15 16 17 -. 0,53 0,62 0,70 0,78 0,85 0,92 1,00 -. 18 19 20 21 22 23 24 -. 1,05 1,11 1,18 1,26 1,29 1,35 1,41 -. 25 30 35 40 45 50 55 60. 1,46 1,73 1,95 2,15 2,37 2,51 2,66 2,80. 45.
(46) Tabla 2.6. Factor de número de hileras [1] Nº de hileras 1 2 3 4. 1,0 1,7 2,5 3,3. Tabla 2.7. Factor de servicio para transmisiones por cadenas. Motor. Tipo de carga. Tipo de motor Motor Motor de combustión eléctrico o. interna con. turbina. transmisión mecánica. 1,0. 1,0. 1,2. 1,2. 1,3. 1,4. 1,4. 1,5. 1,7. hidráulico Uniforme (agitadores, ventiladores, transportadores con carga ligera y uniforme) Choque. moderado. (máquinas. herramienta,. grúas,. transportadores pesados, mezcladoras de alimento y molinos) Choque pesado (Prensas de troquelado, molinos de martillos, transportadores alternos, accionamientos de molino de rodillos). Tabla 2.8. Valores recomendados del factor de seguridad n [3] n 1,25÷2,0. Aplicación Estructuras sometidas a cargas estáticas cuando existe alto grado de confianza en todos los datos del diseño. Elementos de máquinas sometidos a cargas dinámicas con una confianza promedio en. 2,0÷2,5. todos los datos del diseño. Diseño de estructuras estáticas o elementos de máquinas bajo cargas dinámicas con. 2,5÷4,0. incertidumbre acerca de las cargas, propiedades de los materiales, análisis de esfuerzo o el ambiente. Diseño de estructuras estáticas o elementos de máquinas bajo cargas dinámicas con. >4,0. incertidumbre en cuanto a alguna combinación de cargas, propiedades de los materiales, análisis de esfuerzo o el ambiente.. 46.
(47) 2.8. Diseño y evaluación de las transmisiones por cadenas El diseño y evaluación de las transmisiones por cadenas se realiza por la siguiente secuencia: 1) Se seleccionan los números de dientes de las ruedas. Para ello se consideran las siguientes restricciones: . El número de dientes del sprocket conductor se selecciona impar. Ello se debe a que el número de eslabones de las cadenas generalmente es par para evitar el uso de un eslabón de cierre de transición (figura 2.5) de menor resistencia. De esta manera se asegura igual distribución del desgaste en las articulaciones de la cadena y en los dientes de las ruedas. Esto tiene especial importancia si la máquina accionada o el motor se caracterizan por una carga no uniforme y si existe un enlace cinemático rígido con dicha carga.. . Los sprockets no se fabrican con más de 120 dientes ya que en estas condiciones un pequeño aumento en la longitud de la cadena debido al desgaste ocasiona que el contacto entre los dientes y la cadena se desplace hacia el diámetro exterior lo que provoca que la cadena “patine”.. . El número de dientes del sprocket conductor se toma mayor que 17. Si la velocidad de rotación del sprocket conductor es menor de 100 rpm. Y si existen limitaciones a las dimensiones de las ruedas se pueden tomar valores menores. Para. Otras recomendaciones para la selección de los números de dientes se muestran a continuación: Según Renold: : No emplear si fuera posible. : Para velocidades de cadenas no mayor de 4 m/s. : Para velocidades de cadenas no mayor de 7 m/s. : Preferibles para el piñón. : Preferibles para la rueda. : Es posible emplear ruedas dentadas con un número de dientes mayor de 114, pero solo en casos especiales y con un desgaste límite menor del 2%. Según Reshetov: : Para bajas velocidades de cadenas. : Para velocidades media de cadenas. : Para altas velocidades de cadenas. También existen recomendaciones para la selección de los números de dientes en función de la relación de transmisión cinemática, como se muestra en las tablas 2.9 y 2.10.. 47.
(48) Tabla 2.9. Número de dientes recomendados por Dobrovolski [2] 1. 2. 3. 4. 5. 6. 31. 27. 25. 23. 21. 17. 31. 54. 75. 92. 105. 102. Tabla 2.10. Número de dientes recomendados por Renold. 15. 17. 19. 21. 23. 25. 25. --. --. --. --. --. 1,00. 38. 2,53. 2,23. 2,00. 1,80. 1,65. 1,52. 57. 3,80. 3,35. 3,00. 2,71. 2,48. 2,28. 76. 5,07. 4,.47. 4,00. 3,62. 3,30. 3,04. 95. 6,33. 5,59. 5,00. 4,52. 4,13. 3,80. 114. 7,60. 6,70. 6,00. 5,43. 4,96. 4,56. 2) Se calcula la potencia necesaria por la ecuación 2.12 y las tablas 2.4 a 2.8. Para ello se comienza con un número de hileras igual a 1. Con el valor calculado de potencia necesaria. y. la velocidad del árbol conductor se selecciona una cadena en la tabla 2.4 (si es necesario hay que interpolar) de manera que. . Se toman el valor del paso, el tipo de lubricación, etc.. 3) Se calculan los diámetros exteriores de las ruedas:. El coeficiente k se toma 0,6 aproximadamente. Valores más exactos se pueden obtener en el anexo 1. 4) Se calcula la distancia entre centros preliminar ap. Para ello: Se calcula la distancia entre centros mínima:. : Garantiza que no contacten las ruedas y que el arco de engranaje en la rueda menor sea mayor de 120º para Se calcula la distancia entre centros máxima:. La restricción al mayor valor de distancia entre centros se debe a que cuando la cadena es muy grande se estira rápidamente.. 48.
(49) La distancia entre centros recomendada:. La capacidad de carga de las transmisiones por cadenas no es muy dependiente de la distancia entre centros en un intervalo amplio, como se muestra en la ecuación 2.17. Finalmente, la distancia entre centros preliminar de la transmisión se toma como se muestra en la ecuación 2.18, considerando además otras restricciones o exigencias que puedan existir.. Se prefiere además, una disposición horizontal de la línea entre centros, aunque se considera una buena solución si el ángulo de inclinación de la línea de centros con respecto al horizonte es menor de 60º. Siempre que sea posible, el ramal conductor se coloca hacia abajo. La distancia entre centros debe ser ajustable para adaptarse a las tolerancias y al desgaste de la cadena. 5) Se calcula el número de eslabones necesarios de la cadena por la siguiente ecuación:. El número de eslabones necesarios. se redondea a un número _ par y. Se puede utilizar una. cadena con un número impar de eslabones, pero en este caso se necesita un eslabón de cierre de transición (figura 2.5) de menor resistencia. 6) Se calcula la distancia entre centros de la transmisión para el número de eslabones y.. Para asegurar la flecha necesaria en la cadena se reduce la distancia entre centros entre un (0,2 y 0,4 %). 7) Se comprueba el arco de engranaje en el sprocket conductor:. Los diámetros de pasos de los sprockets se obtienen por la ecuación 2.4. 8) Se concluye el dimensionamiento de las ruedas. El perfil de los dientes de los sprockets está normalizado. Se conocen dos tipos fundamentales: el perfil con desplazamiento, que se recomienda como principal y el perfil sin desplazamiento que se recomienda en transmisiones reversibles. Las dimensiones de los sprockets para ambas variantes se muestran en el las tablas 2.12 y 2.13 y la figura 2.10. 9) Se selecciona el material y tratamiento térmico de las ruedas. El principal material en la fabricación de los sprockets es el acero. La composición química y el tratamiento térmico de los aceros más utilizados con este fin se muestran en la tabla 2.11.. 49.
(50) Tabla 2.11. Características de los aceros utilizados en la fabricación de sprockets C (%). Si (%). 0,4÷0,5. Mn (%) S, P (%) Cr (%) Ni (%) 0,2÷2. 0,8< 0,12÷0,2. 0,04< 0,2. Tratamiento térmico. Dureza HRC. 1. Temple superficial o total. 45÷55. 3. Cementación y temple. 55÷60. 1. Las ruedas se pueden fabricar también de hierro fundido si la velocidad de trabajo es menor de 3 m/s y si no existen cargas de choque. Se utiliza fundición gris FG 21-40, aunque en condiciones desfavorables desde el punto de vista del desgaste se recomienda hierro de alta resistencia. En todos los casos las ruedas también se someten al temple.. 50.
(51) Tabla 2.12. Dimensiones de los sprockets [5] Parámetro. Designación. Ecuación. Diámetro primitivo Característica geométrica de engrane Diámetro exterior. Coeficiente de altura del diente. k k. 0,480. 0,532. 0,555. 0,565. 0,575. Diámetro de la circunferencia interior Radio de fondo del diente. r. Radio de acuerdo Radio de la cabeza del diente Ángulo de fondo Ángulo de acuerdo Ángulo del diente Segmento FG. FG. Distancia entre los centros de los radios r1 y r2. OO2. Desplazamiento de los centros de los radios de fondo del diente. e. Coordenada del punto O1 Coordenada del punto O2 Radio de redondeo mínimo Distancia del vértice del diente hasta la línea de los centros del radio de redondeo Diámetro máximo del escalón Radio de redondeo Ancho del diente del sprocket. De una hilera De dos y tres hileras De varias hileras. Ancho del sprocket de múltiples hileras. 51.
(52) Figura 2.10. Dimensiones de los sprockets [5]. Tabla 2.13. Diámetro interior máximo del agujero del sprocket z. Paso de la cadena (mm) 9,523 12,7 15,875 19,05 25,4 38,1. 50,8. 63,5. 12. 15. 22. 29. 33. 45. 70. 92. 120. 14. 20. 29. 33. 44. 58. 84. 119. 145. 16. 24. 33. 43. 50. 69. 102. 140. 178. 18. 40. 39. 48. 58. 79. 118. 159. 206. 20. 32. 45. 57. 68. 89. 138. 178. 248. 22. 38. 49. 62. 75. 98. 149. 213. 276. 24. 42. 57. 71. 83. 116. 173. 244. 330. 52.
(53) 2.9. Ejercicio resuelto Se necesita diseñar la transmisión por cadenas del ejercicio anterior. Se conocen los siguientes datos: Potencia en el árbol conductor: Velocidad del árbol conductor: Velocidad del árbol conducido: El árbol de entrada del transportador se encuentra a una altura de 1,5 m con respecto al árbol del reductor. Solución: 1) Selección de los números de dientes. Se analizan 3 variantes. Como no parece haber limitaciones en cuanto al tamaño se asumen los números de dientes del piñón mayores que 17 e impares: Los números de dientes de la rueda:. 2) Se calcula la potencia necesaria por la ecuación 2.12. : Se toma de la tabla 2.6. Aquí se asume para una primera opción la cadena de una hilera. : Se toma de la tabla 2.8. : Se toma de la tabla 2.7 para transportadores con carga ligera accionados por motor eléctrico. La potencia necesaria para cada una de las variantes de números de dientes se muestra a continuación:. 17. 1,0. 19. 1,11. 21. 1,26 El coeficiente. se toma de la tabla 2.5.. De la tabla 2.4 se toma la cadena de menor paso, cuya potencia admisible sea mayor que la potencia necesaria. Así, la cadena número ANSI 160 a 200 rpm transmite 54,4 kW y a 300 rpm transmite 78,3 kW por lo que puede ser la solución buscada. No obstante, el valor de potencia que. 53.
(54) puede transmitir esta cadena a la velocidad de trabajo de 240 rpm no se indica en la tabla por lo que es necesario interpolar:. Al comparar el valor obtenido de la tabla con los valores de potencia necesaria calculados anteriormente se tiene: No sirve No sirve Sirve Se observa que la variante. satisface las condiciones de explotación.. Se toman los siguientes datos: Lubricación: Tipo B por inmersión en baño de aceite. Paso de la cadena:. pulgadas o. Cuando la condición anterior la cumple más de una variante, la decisión definitiva se toma considerando el aspecto económico. Así, por ejemplo, mientras menor es el número de dientes, menores resultan las dimensiones de los sprockets y por tanto, estos son también más económicos. En el caso de que ninguna de las variantes satisfaga las condiciones de explotación, la capacidad de carga exigida se puede lograr: . Aumentando el número de dientes del sprocket conductor.. . Seleccionando la siguiente cadena de paso mayor.. . Seleccionando una cadena de dos o más hileras.. 3) Se calculan los diámetros exteriores de las ruedas:. 4) Se calcula la distancia entre centros preliminar ap Se calcula la distancia entre centros mínima:. La distancia entre centros máxima:. La distancia entre centros recomendada:. La altura de 1,5 m que se exige se debe de garantizar de manera que el ángulo de inclinación de la línea de centros sea menor a 60º (figura 2.11).. 54.
(55) 1500. a. Figura 2.11. Entorno a la selección de a. La distancia entre centros mínima para una inclinación de 60º:. Cualquier distancia entre centros mayor a 1732 mm garantiza un ángulo de inclinación menor a 60º. Finalmente, se asume como distancia entre centros preliminar la que corresponde a un ángulo de inclinación de 45º:. Este valor cumple con la condición 2.18 y con las restricciones exigidas.. Asimismo, el ramal conductor se coloca hacia abajo y la distancia entre centros se toma ajustable para adaptarse a las tolerancias y al desgaste de la cadena. 5) Se calcula el número de eslabones necesarios de la cadena:. Se redondea. a un número par. 6) Se calcula la distancia entre centros de la transmisión para. :. Para asegurar la flecha necesaria en la cadena se reduce la distancia entre centros entre un (0,2 y 0,4 %).. 55.
(56) El ángulo real de la línea de centros con respecto a la horizontal:. 7) Se comprueba el arco de engranaje en el sprocket conductor. Diámetro de paso del sprocket conductor:. Diámetro de paso del sprocket conducido:. Arco de engranaje en el sprocket conductor:. 8) Concluir el dimensionamiento de las ruedas. Las ecuaciones para el cálculo de las dimensiones de las ruedas se obtienen de la tabla 2.12 y la figura 2.10. El ancho del diente del sprocket:. : Se toma de la tabla 2.2 para cadena la ANSI 160 Radio de fondo del diente:. : Se toma de la tabla 2.2. Diámetro de la circunferencia interior:. Las dimensiones del diente de los sprockets se muestran en la figura 2.12. El resto de la forma geométrica de las ruedas se define con la realización del diseño de los árboles que soportan cada una de las ruedas. En este sentido se considera el diámetro máximo admisible del agujero que se muestra en la tabla 2.13. 9) Seleccionar el material y las propiedades para las ruedas. Se selecciona para cada una de las ruedas acero 40 CrNi con temple por corriente de alta frecuencia hasta alcanzar una dureza de HRC 45÷55.. 56.
(57) 35. 35. Ø1048,4. Ø990,3. 29,4. Ø1019,1. Ø368. Ø312. Ø340,8. 29,4. Figura 2.12. Dimensiones de los sprokets. 57.
(58) BIBLIOGRAFÍA Budynas−Nisbett Shigley‟s (2008): Mechanical Engineering Design, McGraw-Hill. Dobrovolski (1981): Elementos de máquinas, Editorial MIR. Mott, R. L. (2006): Diseño de elementos de máquinas, Editorial Félix Varela, La Habana. Reshetov, D. (1985): Elementos de máquinas, Editorial Pueblo y Educación, La Habana. ___________ (1986): Atlas de diseño de elementos de máquinas, t. I y II, Editorial Pueblo y Educación, La Habana.. 58.
(59)
Figure
![Figura 1.2. Variación de la fuerza cada sección transversal de la correa [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/7411724.470662/6.918.191.723.450.690/figura-variación-de-fuerza-cada-sección-transversal-correa.webp)
![Figura 1.8. F 1 y F 2 en dependencia de Fi [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/7411724.470662/10.918.295.619.370.668/figura-f-f-dependencia-fi.webp)
![Tabla 1.5. Factor de corrección Cp por el diámetro de las poleas [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/7411724.470662/14.918.175.748.765.1044/tabla-factor-corrección-cp-diámetro-poleas.webp)
![Figura 1.9. Factor de corrección Cv para correas de cuero [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/7411724.470662/15.918.219.699.110.395/figura-factor-corrección-cv-correas-cuero.webp)
+7


![Tabla 1.13. Coeficiente K S para un turno de trabajo [4]](https://thumb-us.123doks.com/thumbv2/123dok_es/7411724.470662/23.918.108.814.137.510/tabla-coeficiente-k-s-para-un-turno-trabajo.webp)

Documento similar
La heterogeneidad clínica de esta patolo- gía hizo que se considerasen a numerosos genes de pro- teínas de la matriz extracelular (elastina, fibronectina, genes de los colágenos de
Fuente de emisión secundaria que afecta a la estación: Combustión en sector residencial y comercial Distancia a la primera vía de tráfico: 3 metros (15 m de ancho)..
b) El Tribunal Constitucional se encuadra dentro de una organiza- ción jurídico constitucional que asume la supremacía de los dere- chos fundamentales y que reconoce la separación
quiero también a Liseo porque en mi alma hay lugar para amar a cuantos veo... tiene mi gusto sujeto, 320 sin que pueda la razón,.. ni mande
El fin de la Guerra Fría, con la multiplicación de las operaciones multinacionales o la aparición de riesgos como el terrorismo global tras los ataques a Estados Unidos en septiembre
A Carlos Eduardo, Oscar y Gilma, mis colegas de doctorado que ya se graduaron y que fueron mi ejemplo y grupo de apoyo. Por supuesto a todos los Emes, amigos
Volviendo a la jurisprudencia del Tribunal de Justicia, conviene recor- dar que, con el tiempo, este órgano se vio en la necesidad de determinar si los actos de los Estados
Así, por ejemplo, Cerezo Mir aceptaba que con esa última concepción de Welzel lo determinante seguía siendo la producción causal de un resultado -es decir, algo que quedaba fuera
