Diseño y construcción de un panel digital para controlar 25 funciones ubicadas en la cabina de conducción de los autobuses interprovinciales cinco estrellas
184
0
0
Texto completo
(2) ii. DECLARACIÓN. Yo CALERO SUNTASIG HENRY DANIEL, declaro bajo juramento que el trabajo aquí descrito es de mi autoría; que no ha sido previamente presentada para ningún grado o calificación profesional; y, que he consultado las referencias bibliográficas que se incluyen en este documento. A través de la presente declaración cedo mis derechos de propiedad intelectual correspondientes a este trabajo, a la Escuela Politécnica Nacional, según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento y por la normatividad institucional vigente.. CALERO SUNTASIG HENRY DANIEL.
(3) iii. CERTIFICACIÓN. Certifico que el presente trabajo fue desarrollado por CALERO SUNTASIG HENRY DANIEL, bajo mi supervisión.. Ing. ALCÍVAR COSTALES DIRECTOR DE PROYECTO.
(4) iv. AGRADECIMIENTOS. Quiero agradecer a todas las personas que hicieron posible la culminación de este proyecto en especial al Niño Isinche por sus bendiciones y por darme la salud suficiente para culminar mi meta planteada. A mi madre y mi padre por brindarme todo su apoyo y acompañarme en todo momento de mi vida. A la Corporación TELEVID por permitirme cumplir una de mis metas en sus instalaciones y brindarme todas las facilidades para la culminación del proyecto.. Daniel C..
(5) v. DEDICATORIA. Este trabajo va dedicado: A mis padres por darme la fuerza y el coraje de seguir adelante para alcanzar mis objetivos trazados A Jacqueline Aracelly que en todo el tiempo que nos conocemos supo brindarme toda su comprensión, apoyo y es una persona muy importante en mi vida y siempre estará en mi corazón.. Daniel C..
(6) vi. INDICE PRESENTACIÓN ................................................................................................................................................IX. 1.. CAPÍTULO I: FUNDAMENTOS TEÓRICOS ......................................................................................... 1 1.1 MICROCONTROLADOR 1 ............................................................................................................... 1 1.1.1. INTRODUCCIÓN 1 .......................................................................................................................... 1 1.1.2. DEFINICIÓN 1 ................................................................................................................................. 1 1.1.3. APLICACIONES DE LOS MICROCONTROLADORES 1 ................................................................ 2 1.1.4. ARQUITECTURA BÁSICA 1 ............................................................................................................ 3 1.1.5. EL PROCESADOR O CPU 1 ............................................................................................................ 3 1.1.6. MEMORIA 2...................................................................................................................................... 4 1.1.7. ROM CON MÁSCARA 2 ................................................................................................................... 5 1.1.8. OTP (ONE TIME PROGRAMMABLE) 2 .......................................................................................... 5 1.1.9. EPROM 2 .......................................................................................................................................... 6 1.1.10. EEPROM 2 ........................................................................................................................................ 6 1.1.11. FLASH 2 ............................................................................................................................................ 7 1.1.12. PUERTAS DE ENTRADA Y SALIDA 2 ............................................................................................. 7 1.1.13. RELOJ PRINCIPAL 2 ....................................................................................................................... 8 1.2. RECURSOS ESPECIALES ................................................................................................................ 8 1.2.1. TEMPORIZADORES O "TIMERS" 2................................................................................................ 9 1.2.2. PERRO GUARDIÁN O "WATCHDOG" 2 ........................................................................................ 9 1.2.3. PROTECCIÓN ANTE FALLO DE ALIMENTACIÓN O "BROWNOUT" 2 ................................... 10 1.2.4. ESTADO DE REPOSO O DE BAJO CONSUMO 2 ....................................................................... 10 1.2.5. CONVERSOR A/D (CAD) 2 ............................................................................................................ 10 1.2.6. CONVERSOR D/A (CDA) 2 ............................................................................................................ 10 1.2.7. COMPARADOR ANALÓGICO 2 .................................................................................................... 11 1.2.8. MODULADOR DE ANCHURA DE IMPULSOS O PWM 2 ........................................................... 11 1.2.9. PUERTOS DE E/S DIGITALES 2 ................................................................................................... 11 1.2.10. PUERTOS DE COMUNICACIÓN 2 ............................................................................................... 11 1.3. DISPOSITIVOS ELECTRÓNICOS ................................................................................................ 12 1.3.1. CONDENSADORES 3..................................................................................................................... 12 1.3.2. REGULADORES DE VOLTAJE 4 .................................................................................................. 13 1.3.3. DISPLAY LCD 16 * 2 5.................................................................................................................. 15 1.3.4. RELÉ 6 ............................................................................................................................................ 16 1.3.4.1. Tipos de relés 6 ...................................................................................................................... 17 1.3.5. TECLADO MATRICIAL7 ................................................................................................................ 18 1.3.5.1. Decodificador de teclado 7 .................................................................................................... 19. 2.. CAPÍTULO II: LENGUAJE DE PROGRAMACIÓN ............................................................................ 20 2.1. LENGUAJE DE PROGRAMACIÓN BASCOM AVR .................................................................. 20 2.1.1. INICIO ............................................................................................................................................ 21 2.1.2. COMPILADOR ............................................................................................................................... 21 2.1.3. SIMULADOR .................................................................................................................................. 22 2.1.4. EMULADOR SERIAL ..................................................................................................................... 23 2.1.5. CONEXIONES PRINCIPALES ...................................................................................................... 23 2.1.6. GRABANDO EL MICROCONTROLADOR ................................................................................... 24.
(7) vii. 2.1.7. INSTRUCCIONES BÁSICAS DE BASCOM AVR ........................................................................... 26 2.1.7.1. $regfile .................................................................................................................................. 26 2.1.7.2. $crystal .................................................................................................................................. 26 2.1.7.3. Config ................................................................................................................................... 26 2.1.7.4. Wait, Waitms, Waitus ........................................................................................................... 27 2.1.7.5. Do – Loop ............................................................................................................................. 27 2.1.7.6. Do – Loop Until .................................................................................................................... 27 2.1.7.7. Toggle ................................................................................................................................... 28 2.1.7.8. Dim ....................................................................................................................................... 28 2.1.7.9. Alias ...................................................................................................................................... 28 2.1.7.10. LCD (Display de cristal liquido) ........................................................................................... 29 2.1.7.10.1. Mediante comando tenemos ............................................................................................. 29 2.1.7.10.1.1. Config Lcd ................................................................................................................ 29 2.1.7.10.1.2. Config Lcdpin ........................................................................................................... 29 2.1.7.10.1.3. Config lcdbus............................................................................................................ 30 2.1.7.10.1.4. Lcd ” ” ..................................................................................................................... 30 2.1.7.10.1.5. Locate x,y ................................................................................................................. 30 2.1.7.10.1.6. Shiftlcd...................................................................................................................... 30 2.1.7.10.2. Mediante cuadro de dialogo tenemos .............................................................................. 31 2.1.7.11. DDRx, PORTx, PINx............................................................................................................ 32 2.1.7.12. If – Them – Else .................................................................................................................... 33 2.1.7.13. For – Next ............................................................................................................................. 33 2.1.7.14. Select – Case ......................................................................................................................... 33 2.1.7.15. Símbolos operadores ............................................................................................................. 34 2.1.7.16. Estructura de un programa en BASIC ................................................................................... 35 3.. CAPÍTULO III : DISEÑO Y ENSAMBLAJE DEL PANEL.................................................................. 37 3.1. DESCRIPCIÓN DEL HARDWARE ............................................................................................... 37 3.1.1. EPECIFICACIONES ...................................................................................................................... 37 3.1.2. TARJETA DE TECLADO ............................................................................................................... 39 3.1.2.1. Descripción de los componentes del teclado ......................................................................... 41 3.1.3. TARJETA DE MONITOREO .......................................................................................................... 42 3.1.4. TARJETA DE CEREBRO ............................................................................................................... 44 3.1.4.1. Descripción ........................................................................................................................... 44 3.1.4.1.1. Características ATMEGA-1612 ....................................................................................... 44 3.1.4.1.1.1. Distribución de pines del ATMEGA 16 12 ................................................................. 47 3.1.4.1.1.2. Descripción de pines13 ............................................................................................... 48 3.1.4.1.2. Registro 74HC595 características 43 ................................................................................. 49 3.1.4.1.3. Características ULN 2803 15............................................................................................ 51 3.1.4.1.4. Características del regulador 780516 .................................................................................... 53 3.1.4.2. Fuente de alimentación tarjeta de cerebro. ............................................................................ 54 3.1.5. TARJETA DE RELÉS 17 .................................................................................................................. 60 3.2. DESCRIPCIÓN DE SOFTWARE ................................................................................................... 63 3.2.1. DIAGRAMA DE FLUJO DEL FUNCIONAMIENTO DEL PROYECTO ....................................... 63 3.2.2. DESCRIPCIÓN DE LA FIGURA 3.15 ........................................................................................... 63 3.2.3. DESCRIPCIÓN DE LA FIGURA 3.16 ........................................................................................... 66 3.2.4. DESCRIPCIÓN DE LA FIGURA 3.17 ........................................................................................... 70 3.3. PROGRAMA PRINCIPAL PARA EL MANEJO DEL MÓDULO .............................................. 73.
(8) viii. 4.. CAPÍTULO IV : PRUEBAS Y RESULTADOS .................................................................................... 102 4.1. ELABORACIÓN DE TARJETAS ................................................................................................. 102 4.1.1. TARJETA DE TECLADO ............................................................................................................. 102 4.1.2. TARJETA DE MONITOREO ........................................................................................................ 103 4.1.3. TARJETA DE CEREBRO ............................................................................................................. 104 4.1.4. REGLETA DE CONEXIÓN DEL CEREBRO ............................................................................... 105 4.1.5. TARJETA DE RELÉS ................................................................................................................... 106 4.1.6. ENSAMBLAJE DEL PANEL DIGITAL ........................................................................................ 107 4.1.7. TARJETA DE PRUEBA ................................................................................................................ 108 4.2. RESULTADOS ................................................................................................................................ 108. 5.. CAPÍTULO V : ......................................................................................................................................... 110 5.1. 5.2.. CONCLUSIONES ........................................................................................................................... 110 RECOMENDACIONES ................................................................................................................. 111. REFERENCIAS BIBLIOGRÁFICAS.............................................................................................................. 112 ANEXOS ............................................................................................................................................................. 113 ANEXO A ............................................................................................................................................................ 114 ANEXO B ............................................................................................................................................................ 117 ANEXO C ............................................................................................................................................................ 120 ANEXO D ............................................................................................................................................................ 123 ANEXO E ........................................................................................................................................................... 153 ANEXO F ............................................................................................................................................................. 161 ANEXO G ............................................................................................................................................................ 166 ANEXO H ............................................................................................................................................................ 173.
(9) ix. PRESENTACIÓN El desarrollo de la electrónica digital y en general toda la electrónica tiene tendencia a la reducción del hardware que se utiliza, tomando como una alternativa altamente eficiente y rentable la implementación de dispositivos programables como son los microcontroladores los cuales hacen posible la ejecución de aplicaciones de una forma más sencilla. Otros de los adelantos tecnológicos que han permitido lograr este objetivo ha sido el desarrollo de los teclados que son dispositivos por los cuales podemos activar o desactivar diferentes funciones controladas por un microcontrolador los teclados generalmente son de tipo matricial los cuales poseen filas y columnas, mediante la combinación de estas podemos tener cierto número de teclas. Además por su facilidad de uso se le puede dar una cantidad de aplicaciones. El desarrollo del proyecto va dirigido a la utilización en las carrocerías del Ecuador para resolver uno de los problemas que aqueja a cualquier conductor de un autobús que deba manipular a diario una variedad de funciones en su unidad con la seguridad de monitoreo de la función como también el estado de la misma..
(10) 1. 1.. CAPÍTULO I: FUNDAMENTOS TEÓRICOS. 1.1 MICROCONTROLADOR 1 1.1.1. INTRODUCCIÓN 1 Los microcontroladores están conquistando el mundo. Están presentes en nuestro trabajo, en nuestra casa y en nuestra vida, en general. Se pueden encontrar controlando el funcionamiento de los ratones y teclados de los computadores, en los teléfonos, en los hornos microondas y los televisores de nuestro hogar. Pero la invasión acaba de comenzar y el nacimiento del siglo XXI será testigo de la conquista masiva de estos diminutos computadores, que gobernarán la mayor parte de los aparatos que fabricamos y usamos los humanos 1.1.2. DEFINICIÓN 1 Un microcontrolador es un circuito integrado de alta escala de integración que incorpora la mayor parte de los elementos que configuran un controlador. Un microcontrolador dispone normalmente de los siguientes componentes: Procesador o UCP (Unidad Central de Proceso). Memoria RAM para Contener los datos. Memoria para el programa tipo ROM/PROM/EPROM. Líneas de E/S para comunicarse con el exterior. Diversos módulos para el control de periféricos (temporizadores, Puertas Serie y Paralelo, CAD: Conversores Analógico/Digital, CDA: Conversores Digital/Analógico, etc.). _____________________ 1. http://www.unicrom.com/Tut_arquitectura_microcontrolador.asp.
(11) 2. Generador de impulsos de reloj que sincronizan el funcionamiento de todo el sistema.. Figura 1.1: Esquema de un microcontrolador. 1.1.3. APLICACIONES DE LOS MICROCONTROLADORES 1 Cada vez existen más productos que incorporan un microcontrolador con el fin de aumentar sustancialmente sus prestaciones, reducir su tamaño y coste, mejorar su fiabilidad y disminuir el consumo. Algunos fabricantes de microcontroladores superan el millón de unidades de un modelo determinado producidas en una semana. Este dato puede dar una idea de la masiva utilización de estos componentes. Los microcontroladores están siendo empleados en multitud de sistemas presentes en nuestra vida diaria, como pueden ser juguetes, horno microondas, frigoríficos, televisores, computadoras, impresoras, módems, el sistema de arranque de nuestro coche, etc. Y otras aplicaciones con las que seguramente no estaremos tan familiarizados como instrumentación electrónica, control de sistemas en una nave espacial, etc. Una aplicación típica podría emplear varios microcontroladores para controlar pequeñas partes del sistema..
(12) 3. Estos pequeños controladores podrían comunicarse entre ellos y con un procesador central, probablemente más potente, para compartir la información y coordinar sus acciones, como, de hecho, ocurre ya habitualmente en cualquier PC. 1.1.4. ARQUITECTURA BÁSICA 1 Un microcontrolador es un dispositivo complejo, formado por otros más sencillos. A continuación se analizan los más importantes. 1.1.5. EL PROCESADOR O CPU 1 Es la parte encargada del procesamiento de las instrucciones. Debido a la necesidad de conseguir elevados rendimientos en este proceso, se ha desembocado en el empleo generalizado de procesadores de arquitectura Harvard frente a los tradicionales que seguían la arquitectura de von Neumann. Esta última se caracterizaba porque la CPU se conectaba con una memoria única, donde coexistían datos e instrucciones, a través de un sistema de buses.. Figura 1.2: Arquitectura von Neumann En la arquitectura Harvard son independientes la memoria de instrucciones y la memoria de datos y cada una dispone de su propio sistema de buses para el acceso..
(13) 4. Esta dualidad, además de propiciar el paralelismo, permite la adecuación del tamaño de las palabras y los buses a los requerimientos específicos de las instrucciones y de los datos.. Figura 1.3: Arquitectura Harvard El procesador de los modernos microcontroladores responde a la arquitectura RISC (Computadores de Juego de Instrucciones Reducido), que se identifica por poseer un repertorio de instrucciones máquina pequeño y simple, de forma que la mayor parte de las instrucciones se ejecutan en un ciclo de instrucción. Otra aportación frecuente que aumenta el rendimiento del computador es el fomento del paralelismo implícito, que consiste en la segmentación del procesador (pipe-line), descomponiéndolo en etapas para poder procesar una instrucción diferente en cada una de ellas y trabajar con varias a la vez. 1.1.6. MEMORIA 2 En los microcontroladores la memoria de instrucciones y datos está integrada en el propio chip. Una parte debe ser no volátil, tipo ROM, y se destina a contener el programa de instrucciones que gobierna la aplicación. Otra parte de memoria será tipo RAM, volátil, y se destina a guardar las variables y los datos. Hay dos peculiaridades que diferencian a los microcontroladores de los computadores personales: _____________________ 2. http://www.monografias.com/trabajos12/microco/microco.shtml.
(14) 5. No existen sistemas de almacenamiento masivo como disco duro o disquetes. Como el microcontrolador sólo se destina a una tarea en la memoria ROM, sólo hay que almacenar un único programa de trabajo. La RAM en estos dispositivos es de poca capacidad pues sólo debe contener las variables y los cambios de información que se produzcan en el transcurso del programa. Por otra parte, como sólo existe un programa activo, no se requiere guardar una copia del mismo en la RAM pues se ejecuta directamente desde la ROM. Los usuarios de computadores personales están habituados a manejar Megabytes de memoria, pero, los diseñadores con microcontroladores trabajan con capacidades de ROM comprendidas entre 512 bytes y 8 k bytes y de RAM comprendidas entre 20 y 512 bytes. Según el tipo de memoria ROM que dispongan los microcontroladores, la aplicación y utilización de los mismos es diferente. Se describen las cinco versiones de memoria no volátil que se pueden encontrar en los microcontroladores del mercado. 1.1.7. ROM CON MÁSCARA 2 Es una memoria no volátil de sólo lectura cuyo contenido se graba durante la fabricación del chip. El elevado coste del diseño de la máscara sólo hace aconsejable el empleo de los microcontroladores con este tipo de memoria cuando se precisan cantidades superiores a varios miles de unidades. 1.1.8. OTP (ONE TIME PROGRAMMABLE) 2 El microcontrolador contiene una memoria no volátil de sólo lectura "programable una sola vez" por el usuario. (OTP One Time Programmable). Es el usuario quien puede.
(15) 6. escribir el programa en el chip mediante un sencillo grabador controlado por un programa desde un PC. La versión OTP es recomendable cuando es muy corto el ciclo de diseño del producto, o bien, en la construcción de prototipos y series muy pequeñas. Tanto en este tipo de memoria como en la EPROM, se suele usar la encriptación mediante fusibles para proteger el código contenido. 1.1.9. EPROM 2 Los microcontroladores que disponen de memoria EPROM (Erasable Programmable Read OnIy Memory) pueden borrarse y grabarse muchas veces. La grabación se realiza, como en el caso de los OTP, con un grabador gobernado desde un PC. Si, posteriormente, se desea borrar el contenido, disponen de una ventana de cristal en su superficie por la que se somete a la EPROM a rayos ultravioleta durante varios minutos. Las cápsulas son de material cerámico y son más caros que los microcontroladores con memoria OTP que están hechos con material plástico. 1.1.10. EEPROM 2 Se trata de memorias de sólo lectura, programables y borrables eléctricamente EEPROM (Electrical Erasable Programmable Read OnIy Memory). Tanto la programación como el borrado, se realizan eléctricamente desde el propio grabador y bajo el control programado de un PC. Es muy cómoda y rápida la operación de grabado y la de borrado. No disponen de ventana de cristal en la superficie. El número de veces que puede grabarse y borrarse una memoria EEPROM es finito, por lo que no es recomendable una reprogramación continua. Son muy idóneos para la enseñanza y la Ingeniería de diseño..
(16) 7. Este tipo de memoria es relativamente lenta. 1.1.11. FLASH 2 Se trata de una memoria no volátil, de bajo consumo, que se puede escribir y borrar. Funciona como una ROM y una RAM pero consume menos y es más pequeña. A diferencia de la ROM, la memoria FLASH es programable en el circuito. Es más rápida y de mayor densidad que la EEPROM. La alternativa FLASH está recomendada frente a la EEPROM cuando se precisa gran cantidad de memoria de programa no volátil. Es más veloz y tolera más ciclos de escritura/borrado. Las memorias EEPROM y FLASH son muy útiles al permitir que los micro controladores que las incorporan puedan ser reprogramados "en circuito", es decir, sin tener que sacar el circuito integrado de la tarjeta. 1.1.12. PUERTAS DE ENTRADA Y SALIDA 2 La principal utilidad de las patitas que posee la cápsula que contiene un microcontrolador es soportar las líneas de E/S (entrada / salida) que comunican al computador interno con los periféricos exteriores. Según los controladores de periféricos que posea cada modelo de microcontrolador, las líneas de E/S se destinan a proporcionar el soporte a las señales de entrada, salida y control..
(17) 8. 1.1.13. RELOJ PRINCIPAL 2 Todos los microcontroladores disponen de un circuito oscilador que genera una onda cuadrada de alta frecuencia, que configura los impulsos de reloj usados en la sincronización de todas las operaciones del sistema. Generalmente, el circuito de reloj está incorporado en el microcontrolador y sólo se necesitan unos pocos componentes exteriores para seleccionar y estabilizar la frecuencia de trabajo. Dichos componentes suelen consistir en un cristal de cuarzo junto a elementos pasivos o bien un resonador cerámico o una red R-C. Aumentar la frecuencia de reloj supone disminuir el tiempo en que se ejecutan las instrucciones pero lleva aparejado un incremento del consumo de energía.. 1.2.. RECURSOS ESPECIALES. Cada fabricante oferta numerosas versiones de una arquitectura básica de microcontrolador. En algunas amplía las capacidades de las memorias, en otras incorpora nuevos recursos, en otras reduce las prestaciones al mínimo para aplicaciones muy simples, etc. La labor del diseñador es encontrar el modelo mínimo que satisfaga todos los requerimientos de su aplicación. De esta forma, minimizará el coste, el hardware y el software. Los principales recursos específicos que incorporan los microcontroladores son: • Temporizadores o "Timers". • Perro guardián o "Watchdog". • Protección ante fallo de alimentación o "Brownout". • Estado de reposo o de bajo consumo. • Conversor A/D. • Conversor D/A..
(18) 9. • Comparador analógico. • Modulador de anchura de impulsos o PWM. • Puertas de E/S digitales. • Puertas de comunicación. 1.2.1. TEMPORIZADORES O "TIMERS" 2 Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la cuenta de acontecimientos que suceden en el exterior (contadores). Para la medida de tiempos se carga un registro con el valor adecuado y a continuación dicho valor se va incrementando o decrementando al ritmo de los impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en el que se produce un aviso. Cuando se desean contar acontecimientos que se materializan por cambios de nivel o flancos en alguna de las patitas del micro controlador, el mencionado registro se va incrementando o decrementando al ritmo de dichos impulsos. 1.2.2. PERRO GUARDIÁN O "WATCHDOG" 2 Cuando el computador personal se bloquea por un fallo del software u otra causa, se pulsa el botón del reset y se reinicializa el sistema. Pero un micro controlador funciona sin el control de un supervisor y de forma continuada las 24 horas del día. El Perro guardián consiste en un temporizador que, cuando se desborda y pasa por 0, provoca un reset automáticamente en el sistema. Se debe diseñar el programa de trabajo que controla la tarea de forma que refresque o inicialice al Perro guardián antes de que provoque el reset. Si falla el programa o se bloquea, no se refrescará al Perro guardián y, al completar su temporización, "ladrará y ladrará" hasta provocar el reset..
(19) 10. 1.2.3. PROTECCIÓN ANTE FALLO DE ALIMENTACIÓN O "BROWNOUT" 2 Se trata de un circuito que resetea al micro controlador cuando el voltaje de alimentación (VDD) es inferior a un voltaje mínimo ("brownout"). Mientras el voltaje de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado, comenzando a funcionar normalmente cuando sobrepasa dicho valor. 1.2.4. ESTADO DE REPOSO O DE BAJO CONSUMO. 2. Son abundantes las situaciones reales de trabajo en que el microcontrolador debe esperar, sin hacer nada, a que se produzca algún acontecimiento externo que le ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los aparatos portátiles), los microcontroladores disponen de una instrucción especial (SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el cual los requerimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se "congelan" sus circuitos asociados, quedando sumido en un profundo "sueño" el microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo. 1.2.5. CONVERSOR A/D (CAD) 2 Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital) pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen disponer de un multiplexor que permite aplicar a la entrada del CAD diversas señales analógicas desde las patitas del circuito integrado. 1.2.6. CONVERSOR D/A (CDA) 2 Transforma los datos digitales obtenidos del procesamiento del computador en su correspondiente señal analógica que saca al exterior por una de las patitas de la cápsula. Existen muchos efectores que trabajan con señales analógicas..
(20) 11. 1.2.7. COMPARADOR ANALÓGICO 2 Algunos modelos de micro controladores disponen internamente de un Amplificador Operacional que actúa como comparador entre una señal fija de referencia y otra variable que se aplica por una de las patitas de la cápsula. La salida del comparador proporciona un nivel lógico 1 ó 0 según una señal sea mayor o menor que la otra. También hay modelos de micro controladores con un módulo de tensión de referencia que proporciona diversas tensiones de referencia que se pueden aplicar en los comparadores. 1.2.8. MODULADOR DE ANCHURA DE IMPULSOS O PWM 2 Son circuitos que proporcionan en su salida impulsos de anchura variable, que se ofrecen al exterior a través de las patitas del encapsulado. 1.2.9. PUERTOS DE E/S DIGITALES 2 Todos los microcontroladores destinan algunas de sus patitas a soportar líneas de E/S (entrada / salidas) digitales. Por lo general, estas líneas se agrupan de ocho en ocho formando Puertos. Las líneas digitales de los Puertos pueden configurarse como Entrada o como Salida cargando un 1 ó un 0 en el bit correspondiente de un registro destinado a su configuración. 1.2.10. PUERTOS DE COMUNICACIÓN 2 Con objeto de dotar al microcontrolador de la posibilidad de comunicarse con otros dispositivos externos, otros buses de microprocesadores, buses de sistemas, buses de redes y poder adaptarlos con otros elementos bajo otras normas y protocolos..
(21) 12. Algunos modelos disponen de recursos que permiten directamente esta tarea, entre los que destacan: UART, adaptador de comunicación serie asíncrona. USART, adaptador de comunicación serie síncrona y asíncrona Puerta paralela esclava para poder conectarse con los buses de otros microprocesadores. USB (Universal Serial Bus), que es un moderno bus serie para los PC. Bus I2C, que es un interfaz serie de dos hilos desarrollado por Philips. Uno de los factores que más importancia tiene a la hora de seleccionar un microcontrolador entre todos los demás es el soporte tanto software como hardware de que dispone. Un buen conjunto de herramientas de desarrollo puede ser decisivo en la elección, ya que pueden suponer una ayuda inestimable en el desarrollo del proyecto.. 1.3. DISPOSITIVOS ELECTRÓNICOS 1.3.1. CONDENSADORES 3 En electricidad y electrónica, un condensador, capacitor o capacitador es un dispositivo que almacena energía eléctrica, es un componente pasivo. Está formado por un par de superficies conductoras en situación de influencia total (esto es, que todas las líneas de campo eléctrico que parten de una van a parar a la otra),. _____________________ 3. http://es.wikipedia.org/wiki/Condensador_el%C3%A9ctrico.
(22) 13. generalmente en forma de tablas, esferas o láminas, separados por un material dieléctrico (siendo este utilizado en un condensador para disminuir el campo eléctrico, ya que actúa como aislante) o por el vacío, que, sometidos a una diferencia de potencial (d.d.p.) adquieren una determinada carga eléctrica, positiva en una de las placas y negativa en la otra (siendo nula la carga total almacenada). La carga almacenada en una de las placas es proporcional a la diferencia de potencial entre esta placa y la otra, siendo la constante de proporcionalidad la llamada capacidad o capacitancia. En el Sistema internacional de unidades se mide en Faradios (F), siendo 1 faradio la capacidad de un condensador en el que, sometidas sus armaduras a una (d.d.p.) de 1 voltio, éstas adquieren una carga eléctrica de 1 culombio.. Figura 1.4: Símbolo Condensador Ideal 1.3.2. REGULADORES DE VOLTAJE 4 Dentro de los reguladores de voltaje con salida fija, se encuentran los pertenecientes a la familia LM78xx, donde “xx” es el voltaje de la salida. Estos son 5, 6, 8, 9, 10, 12, 15, 18 y 24V, entregando una corriente máxima de 1 Amper y soporta consumos pico de hasta 2.2 Amperes. Poseen protección contra sobrecargas térmicas y contra cortocircuitos, que desconectan el regulador en caso de que su temperatura de juntura supere los 125°C. Los LM78xx son reguladores de salida positiva, mientras que la familia LM79xx son para voltajes equivalentes pero con salida negativa. Así, un LM7805 es capaz de.
(23) 14. entregar 5 voltios positivos, y un LM7909 entregara 9 voltios negativos. La cápsula que los contiene es una TO-220, igual a la de muchos transistores de mediana potencia. Para alcanzar la corriente máxima de 1 Amper es necesario dotarlo de un disipador de calor adecuado, sin el solo obtendremos una fracción de esta corriente antes de que el regulador alcance su temperatura máxima y se desconecte. La potencia además depende de la tensión de entrada, por ejemplo, si tenemos un LM7812, cuya tensión de salida es de 12v, con una tensión de entrada de digamos 20v, y una carga en su salida de 0,5A, multiplicando la diferencia entre la tensión de entrada y la tensión de salida por la corriente que circulara por la carga nos da los vatios que va a tener que soportar el integrado: (Vint - Vout) x Iout = (20 - 12) x 0.5 = 4W. Figura 1.5: Reguladores de voltaje. _____________________ 4. http://www.google.com.ec/imgres?imgurl=http://www.ucontrol.com.ar/Articulos/78xx/ 78xx.h1.jpg&imgrefurl=http://www.ucontrol.com.ar/Articulos/78xx/78xx.htm&h=350&w =329&sz=15&tbnid=iTE0LGt8hevpM:&tbnh=120&tbnw=113&prev=/images%3Fq%3D reguladores%2Bde%2Bvoltaje&hl=es&usg=__GmFuBxDcWfKqEwwAugJVwK5J_M= &ei=RPv4Srr4DNTinAfrlrCGDQ&sa=X&oi=image_result&resnum=4&ct=image&ved= 0CBMQ9QEwAw.
(24) 15. La tensión de entrada es un factor muy importante, ya que debe ser superior en unos 3 voltios a la tensión de salida (es el mínimo recomendado por el fabricante), pero todo el exceso debe ser eliminado en forma de calor. Si en el ejemplo anterior en lugar de entrar con 20 volts solo usamos 15V (los 12V de la salida más el margen de 3V sugerido) la potencia disipada es mucho menor: (Vint - Vout) x Iout = (15 - 12) x 0.5 = 1.5W De hecho, con 15v la carga del integrado es de 1,5W, menos de la mitad que con 20v, por lo que el calor generado será mucho menor y en consecuencia el disipador necesario también menor.. 1.3.3. DISPLAY LCD 16 * 2 5 Display LCD 16*2. pantalla de cristal líquido o LCD (acrónimo del inglés Liquid. Crystal Display) es una pantalla delgada y plana formada por un número de píxeles en color o monocromos colocados delante de una fuente de luz o reflectora. A menudo se utiliza en dispositivos electrónicos, ya que utiliza cantidades muy pequeñas de energía eléctrica. Además es un dispositivo que nos permite mostrar información alfanumérica ó caracteres diseñados, presentando una ventaja sobre los displays de 7 segmentos. El manejo de un LCD, se basa en que deben ser enviados desde el microcontrolador, durante un tiempo determinado por el fabricante. Pero cuando se trata. de. programación en alto nivel, este proceso es realizado internamente por el compilador o por librerías que están previamente hechas en el software.. _____________________ 5. http://es.wikipedia.org/wiki/LCDdisplay _16*2.
(25) 16. Figura 1.6: Pantalla Display LCD 16*2 1.3.4. RELÉ 6 Un relé es un interruptor accionado por un electroimán. Un electroimán está formado por una barra de hierro dulce, llamado núcleo, rodeada por una bobina de hilo de cobre. Al pasar una corriente eléctrica por la bobina en núcleo de hierro se magnetiza por efecto de campo producido por la bobina, convirtiéndose en un imán tanto más potente cuanto mayor sea la línea de intensidad de la corriente y el número de vueltas de la bobina. Al abrir de nuevo el interruptor y deja de pasar corriente por la bobina, desaparece el campo magnético y el núcleo de ser un imán.. Figura 1.7: Símbolo Relé _____________________ 6. http://platea.pntic.mec.es/~pcastela/tecno/documentos/apuntes/rele.pdf.
(26) 17. 1.3.4.1. Tipos de relés 6 El relé que hemos visto hasta ahora funciona como un interruptor. Está formado por un contacto móvil o polo y un contacto fijo. Pero también hay relés que funcionan como un conmutador, porque disponen de un polo (contacto móvil) y dos contactos fijos.. Figura 1.8: Partes Relé El relé simple es aquel que tiene un solo contacto móvil y un solo contacto fijo. Figura 1.9: Símbolo Relé Simple.
(27) 18. El relé doble es aquel que tiene un solo contacto móvil pero este se caracteriza por tener dos contactos fijos.. Figura 1.10: Símbolo Relé Doble 1.3.5. TECLADO MATRICIAL7 Los teclados matriciales son ensamblados en forma de matriz, como se ilustra la figura. El diagrama muestra un teclado como una matriz de de 4 x 4 – 16 teclas configuradas en 4 columnas y 4 renglones. Cuando no se ha oprimido ninguna tecla, (todas las teclas abiertas) no hay conexión entre renglones y columnas Cuando se oprime una tecla se hace una conexión entre la columna y el renglón de la tecla. Figura 1.11: Forma del teclado matricial _____________________ 7. http://galia.fc.uaslp.mx/~cantocar/microprocesadores/EL_Z80_PDF_S/20_TECLAD. O_MATRICIAL.PDF.
(28) 19. 1.3.5.1. Decodificador de teclado 7 Muchos teclados comerciales ya traen incluido su decodificador, que se escanea el teclado y si, una tecla es presionada, regresa un número que identifica la tecla. Otra alternativa es adquirir por separado un chip decodificador y conectarlo al teclado. El decodificador mostrado tiene 8 entradas; las 4 entradas “X” son conectadas a las 4 columnas del teclado y las 4 entradas “Y” son conectadas a los 4 renglones. No se muestra los capacitores que gobiernan la rapidez a la que se escanea el teclado. Cuando se oprime una tecla el código de 4 bits de la tecla (con 16 teclas, los códigos están entre 0000 y 1111 en binario) aparecerá en las 4 líneas de salida y la línea de dato disponible (DA) se pone en BAJO. Si se conecta a una línea de interrupción el microprocesador será interrumpido cuando se oprima alguna tecla. La Rutina de Servicio de la Interrupción, entonces lee los 4 bits y procesa el dato. El chip decodificador se encargara de eliminar los rebotes de las teclas, lo que libera al programador de esta responsabilidad, esto en una ventaja al usar un chip decodificador.. Figura # 1.12: Decodificador de teclado hexadecimal.
(29) 20. 2. CAPÍTULO II: LENGUAJE DE PROGRAMACIÓN 2.1. LENGUAJE DE PROGRAMACIÓN BASCOM AVR La herramienta BASCOM AVR desarrollada por la empresa MCS Electronics, sirve para realizar programas de alto nivel para microcontroladores AVR, el cual posee un compilador y un ensamblador que traduce las instrucciones estructuradas en lenguaje de máquina.. PROGRAMACION EN ALTO NIVEL (*.bAS). COMPILADOR. ESAMBLADOR. ARCHIVO OBJETO. ARCHIVO*.HEX. Figura 2.1: Diagrama de bloques de programación estructurada Luego de instalar el paquete computacional, el cual se puede conseguir como DEMO en la página del MCS Electronics, podemos apreciar la siguiente pantalla inicial.. Figura 2.2: Ambiente del BASCOM AVR.
(30) 21. Dentro de ella podemos ver claramente una barra de herramientas, un menú y el área de trabajo. A continuación se explicara los iconos o atajos más importantes para manejar la herramienta BASCOM AVR. 2.1.1. INICIO Presionando NEW, nosotros podemos abrir un archivo en blanco para empezar a trabajar en nuestro proyecto.. Figura 2.3: Barra de Herramientas File 2.1.2. COMPILADOR Presionando el icono de la barra de herramientas o F7, nosotros podemos compilar nuestro proyecto y obtener un archive .HEX, el cual va hacer grabado en el microcontrolador. Figura 2.4: Icono del compilador BASCOM AVR Una vez que se a compilado el proyecto puede aparecer el siguiente cuadro de confirmación.. Figura 2.5: Cuadro de confirmación de compilación.
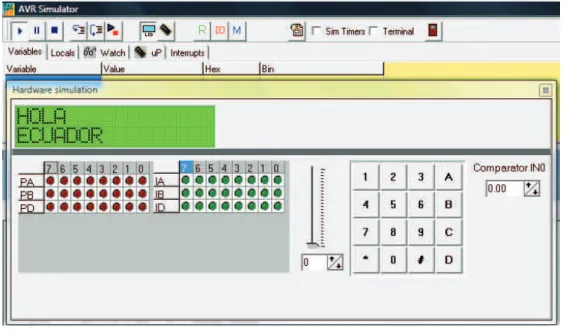
(31) 22. En el cual se puede comprobar el porcentaje de memoria utilizada en el microcontrolador. 2.1.3. SIMULADOR Una vez que se compila un proyecto, se puede similar con ayuda de BASCOM SIM, lo cual se realice presionando el icono de simulación de la barra de herramientas F2.. Figura 2.6: Icono del simulador BASCOM AVR Una vez que se presiona el simulador, aparece una pantalla donde se puede apreciar el programa principal, espacios de memoria, emuladores de comunicación serial, emuladores de LCD, etc.. Figura 2.7: Cuadro de simulación en BASCOM AVR.
(32) 23. Es preferible al momento de usar este simulador, que se vaya realizando el proceso paso a paso mediante F8, con lo cual observamos una flecha azul en la parte izquierda del programa, que nos indicara el avance de la simulación 2.1.4. EMULADOR SERIAL. Figura 2.8: Icono del Emulador serial BASCOM AVR Con este icono se puede hacer uso de un emulador de comunicación serial entre el microcontrolador y un PC, en el cual podremos observar la siguiente figura, que emula un terminal no inteligente, el cual recibe o transmite caracteres.. Figura 2.9: Emulador de Comunicación Serial 2.1.5. CONEXIONES PRINCIPALES Dentro de las conexiones principales de un microcontrolador están: el programador, el oscilador, la alimentación y el reset. Para la cual se recomienda tomar en cuenta los siguientes aspectos al momento de armar un circuito..
(33) 24. Figura 2.10 Conexiones principales del microcontrolador AVR 2.1.6. GRABANDO EL MICROCONTROLADOR Una vez que obtenemos nuestro archivo “.HEX”, procedemos a grabar el microcontrolador, para la cual necesitamos un circuito que active la programación del microcontrolador y pace todas las instrucciones hacia la memoria de programa del mismo. En el mercado encontramos una diversidad de circuitos grabadores de AVR, los cuales nos muestran principalmente los fusibles y el archivo a cargar en el microcontrolador. Por ejemplo dentro de la ayuda de BASCOM, se encuentra un circuito grabador, llamado STK200-300 (IPS Programmer), el cual utiliza el puerto paralelo (DB25) para grabar el microcontrolador..
(34) 25. Figura 2.11: Circuito de grabación en paralelo (STK 200-300) para el microcontrolador AVR Además se puede interactuar con el mismo BASCOM para escribir el programa, compilar y grabar el micro controlador, ya que si se presiona F4 o el icono de la barra de herramientas, nos puede dar la opción de utilizar el programador mostrado anteriormente. Y podemos visualizar un software propio del BASCOM, que nos permita grabar el microcontrolador, el cual se observa a continuación.. Figura 2.12: Pantalla de grabación del programa BASCOM AVR.
(35) 26. 2.1.7. INSTRUCCIONES BÁSICAS DE BASCOM AVR Para iniciar a descubrir cada una de las instrucciones que posee esta herramienta, empezaremos realizando la respectiva explicación de los comandos de instrucciones y un ejemplo de cada comando de instrucción. 2.1.7.1.. $regfile. Esta instrucción siempre va al inicio de cualquier proyecto que realicemos, ya que esta se encarga de direccionar el respectivo microcontrolador que vamos a usar. Por ejemplo si vamos a usar: ATMEGA 48 —$regfile=”m48def.dat” ATMEGA 16 —$regfile=”m16def.dat” ATMEGA 8 —$regfile=”m88def.dat” 2.1.7.2.. $crystal. Esta instrucción va a especificar la frecuencia de oscilación con la que va a funcionar el micro controlador Por ejemplo: $crystal=1000000. 2.1.7.3.. para 1MHz. $crystal=8000000. para 8MHz. $crystal=11059200. para 11.0592MHz. Config. Esta instrucción especifica la configuración de un pin, un puerto o un dispositivo, ya que pueden ser configurados como estradas o salida de datos..
(36) 27. Por ejemplo:. 2.1.7.4.. Config portb = output. Puerto B como salida. Config pina.0 = input. Pin A.0 como estrada. Config LCD = 16 * 2. LCD de 16 caracteres y 2 líneas. Wait, Waitms, Waitus. Esta instrucción sirve para crear un retardo, ya sea en segundos, milisegundos y microsegundos respectivamente. Por ejemplo:. 2.1.7.5.. Wait 3. Espera 3 segundos. Waitms 700. Espera 3 segundos. Waitus 500. Espera 3 segundos. Do – Loop. Esta instrucción es un lazo cerrado, en el cual se ejecuta un conjunto de instrucciones de forma indeterminada. 2.1.7.6.. Do – Loop Until. Es un lazo definido por la condición de una variable que está dentro del lazo, la cual define cuando termina de ejecutarse el conjunto de instrucciones. Por ejemplo: Do A=a+1 Loop Until a= 10. Termina el lazo cuando a=10.
(37) 28. 2.1.7.7.. Toggle. Este comando sirve para complementar el estado anterior de alguna variable o pin de algún puerto. Por ejemplo: Toggle Portb.0 2.1.7.8.. Complementa el Portb.0. Dim. Dim Sirve para dimensionar el tipo de variable que se va a utilizar, entre los tipos de variables están en los siguientes: Tabla 2.1 Dimensiones de variables BASCOM AVR. 2.1.7.9.. TIPO. DIMENSION. Bit. 0-1. Byte. 0 a 255. Word. 0 a 65535. Long. -2147483648 a 2147483647. Integer. -32768 a 32767. Single. 1.5 x 10-45 x 3.4 x 1038. String. Cadena de caracteres máximo 254. Array. Matriz 65535. Double. 5.0 x 10324 a 1.7 x 10308. Alias. Sirve para dar un nombre general dentro de un proyecto, ya sea a un puerto o pin de un puerto..
(38) 29. Por ejemplo: Foco Alias Portb.0 El Portb.0 ahora se llama foco 2.1.7.10. LCD (Display de cristal liquido) En el caso del BASCOM AVR, podemos controlar al LCD de dos maneras: por comandos o por configuración en cuadro de dialogo. 2.1.7.10.1.. Mediante comando tenemos. 2.1.7.10.1.1. Config Lcd Sirve para configurar la clase de LCD que vamos a utilizar puede ser de 16 caracteres por dos líneas (16x2), de 20 caracteres por 4 líneas (20x4), etc Por ejemplo: Config Lcd=16 * 2. (Display de 16 x 2). 2.1.7.10.1.2. Config Lcdpin Sirve para configurar los pines por los cuales se va a manejar la información la clase de LCD que vamos a utilizar, puede ser de 16 caracteres por 2 líneas (16 x 2), de 20 caracteres por 4 líneas (20x4), etc Por ejemplo: Config Lcdpin= Pin, Db4=Porta.4, Db5=Porta.5, Db6= Porta.6, Db7=Porta.7, E=Portc.7, Rs=Portc.6.
(39) 30. 2.1.7.10.1.3. Config lcdbus Esta instrucción sirve para configurar cual será el modo de envió de datos, ya que puede ser hecho por 4 pines u 8 pines. Por ejemplo: Config lcdbus=4 (4 pines de datos) 2.1.7.10.1.4. Lcd ” ” Sirve para escribir cualquier frase en el LCD, sin importar la localización del cursor. Por ejemplo: Lcd= “HOLA” 2.1.7.10.1.5. Locate x,y Sirve para localizar el cursor en la línea y columna adecuada, para poder empezar a escribir en el LCD Por ejemplo: Locate 1,1 (Localización del cursor en la fila 1, columna 1) 2.1.7.10.1.6. Shiftlcd Sirve para mover todo el texto del LCD, ya sea para la izquierda o derecha, con las instrucciones: Shiftlcd left Shiftlcd right.
(40) 31. 2.1.7.10.2.. Mediante cuadro de dialogo tenemos. BACOM AVR, nos permite interactuar con el hardware, mediante cuadros de dialogo, a los cuales podemos ingresar mediante el menú de opciones, el mismo que nos aprueba la configuración de los pines que ocuparemos para realizar la comunicación de los distintos dispositivos o periféricos de un micro controlador AVR.. Figura 2.13: Cuadro de diálogo del BASCOM AVR para configurar un LCD La siguiente pantalla nos muestra cómo podemos configurar los pines y el tipo de LCD que utilizaremos.. Figura 2.14: Cuadro de diálogo del BASCOM AVR para escoger el funcionamiento de un LCD.
(41) 32. Es recomendable realizar todas las configuraciones de dispositivos mediante código y mediante cuadros de diálogo; de esta manera nos aseguramos que la información de las interfaces de salida estén doblemente escritas y no se pierda en ningún momento. 2.1.7.11.. DDRx, PORTx, PINx. DDR, PORT Y PIN son registros que nos permiten utilizar el puerto como entrada o salida de datos. DDR : Con figura el pin como estrada o salida de datos. PORT : Es el registro de salida de datos. Pin : Es el registro de entrada de datos. Las siguientes combinaciones, hacen que los pines funcionen en configuración especial, como explica a continuación. Ddrb.x = 0. Entrada alta impedancia.. Portb.x = 0 Ddrb.x = 0. Entrada pull up.. Portb.x = 1 Ddrb.x = 1. Salida a cero (0L) 20 mA.. Portb.x = 0 Ddrb.x = 1. Salida a uno (1L) 20 mA.. Portb.x = 1 Es importante recalcar que cuando se configura un puerto como salida, se debe ocupar la palabra PORT y si se lo configura como entrada se usa la palabra PIN..
(42) 33. 2.1.7.12.. If – Them – Else. Son sentencias condicionales, las cuales responden a un estado de voltaje (0L, 1L), de contenido (caracteres), etc. CASO CONTRARIO CONDICION. SI. Figura 2.15 Condición Lógica IF-ELSE 2.1.7.13.. For – Next. Son instrucciones de repetición, ya que se ejecutan un conjunto de instrucciones, dependiendo de una variable incremental que se encuentre dentro del lazo.. i=0 ; i<=10 ; i= 10. EJECUTAR HASTA QUE i=10. Figura 2.16 Condición de repetición FOR – NEXT 2.1.7.14.. Select – Case. Son sentencias que se pueden ejecutar, dependiendo del estado de una variable de selección..
(43) 34. Dentro de este esquema se puede tener un conjunto de casos que pueden ser ejecutados, dependiendo de las variables en juego.. VARIABLE. CASO 1. CASO 2. CASO3. Figura 2.17 Condición de selección SELECT – CASE 2.1.7.15.. Símbolos operadores. Dentro de los operadores, pueden utilizarse los matemáticos, de relación y lógicos. Además se debe tomar en cuenta que BASCOM nos permite realizar operaciones únicamente con dos variables a la vez. A continuación podremos observar los operadores más comunes.. Operadores Matemáticos Suma: a=b+c Resta: a=b-c Multiplicación: a=b*c División: a MOD b Operadores Matemáticos =. Igual. <>. No es igual X<>Y. X=Y.
(44) 35. <. Menor que. X<y. >. Mayor que. X>Y. <=. Menor Igual X<=Y. >=. Mayor Igual X>=Y. Operadores lógicos NOT. Complemento (Negación). AND. Conjunción (Y). OR. Disyunción(O). XOR. Or Exclusiva. Representación de lógica digital Para la representación de un número binario o hexadecimal, dentro de BASCOM AVR, es necesario anteponer el símbolo “&”. En el caso de números decimales, no es necesario anteponer ningún símbolo. Ejemplo: Porta= &HF9. Número Hexadecimal. Porta= &HF9. Número Hexadecimal. Porta= &HF9. Número Hexadecimal. 2.1.7.16.. Estructura de un programa en BASIC. Este tema es muy importante tocar, ya que cuando se estructura un programa en alto nivel, es necesario llevar un orden y vinculación de las instrucciones que se realizan. Es primordial que se tengas estructuradas 4 partes dentro de un programa en lenguaje de alto nivel. ·. Configuraciones y Dimensionamientos de variables y subrutinas. ·. Programa principal.
(45) 36. ·. Subrutinas. ·. Tablas de datos. El siguiente es un ejemplo de cómo se puede estructurar un programa en alto nivel, con tipos de instrucciones que se pueden realizar en su respectivo orden. $regfile=”m16def.dat” Configuraciones y. $crystal=8000000. Dimensionamientos. Config Portb.Output Declare Sub Espera () Do Instrucciones. Programa. Principales en. Principal. Ciclo repetitivo Loop Espera:. Subrutinas. Instrucciones De subrutina Return. Tablas de. Tabla1:. Datos. Data &HC0, &HF(.
(46) 37. 3. CAPÍTULO III : DISEÑO Y ENSAMBLAJE DEL PANEL 3.1.. DESCRIPCIÓN DEL HARDWARE. 3.1.1. EPECIFICACIONES Se trata de un panel digital para el control de. 25 funciones localizadas en las. cabinas de los autobuses interprovinciales las cuales son:. Tabla 3.1: Tabla de funciones controladas por el panel digital Actividad 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25. Función Luces Guías Luces de Retro Ventilación Licuadora Puerta Luces de bodega Neblineros Faldón Video Luces de baño Aire forzado 1 Radio Rutero Aire forzado 2 Luces de salón 1 (luces de pasillo del autobús) Luces de lectura Luces de grada Bocina Luces de salón 2 (Luces de los costados del autobús) Media luz 1 (Luces normales) Media luz 2 (Halógenos) Luces de cabina 1 Luces de cabina 2 Plumas lentas Plumas rápidas.
(47) 38. Se debe tener en cuenta los voltajes que maneja un autobús: ·. Batería 24 V. ·. Contacto de encendido 24V (Encendido). ·. Contacto de encendido 0V (Apagado). ·. Parada solicitada a 24 V (Sin presionar). ·. Parada solicitada a 0 V (Presionado). ·. Tierra (GND). Por lo que para el diseño del panel digital se debe tener las siguientes consideraciones:. ·. Las funciones de plumas lentas y plumas rápidas tienen diferente voltaje por lo que se alimentara mediante una bornera instalada en el módulo, en la tarjeta de relés, estas funciones serán activadas por relés dobles.. ·. De igual manera la bocina (PITO) tiene su propio voltaje por lo que esta función será alimentada mediante la bornera instalada en el módulo, en la tarjeta de relés, esta función será activada por un relé doble.. ·. Por otra parte para las funciones de Video, Monitor, Radio funcionan a 12V o dependiendo de las especificaciones del fabricante por lo que este voltaje también será colocado en la bornera instalada en el módulo, en la tarjeta de relés, pero estas serán activadas por relés simples.. ·. Las funciones restantes operan a 24V (voltaje de batería) y serán activados por relés simples.. · Para la activación y desactivación de cada una de las funciones lo vamos a realizar mediante un teclado, y los datos ingresados serán manejados por el microcontrolador ATMEGA-16..
(48) 39. Para el manejo de datos se utiliza el SIPO (Serial In Paralelo Out) para esto dependiendo de la tecla presionada en el teclado, el microcontrolador envía datos a los registros de desplazamiento 74HC595, y de igual manera el microcontrolador envía datos de actualización de salidas de los registros. Los datos enviados por los registros de desplazamiento tienen que ser amplificados por lo que se utiliza un amplificador inversor ULN 2803.. Una vez que tenemos amplificada la señal esta activara al relé asignado a la función y de igual manera se activara el LED de la tarjeta de monitoreo y presentara en el LCD, indicando que acción se está ejecutando en ese momento (Encendiendo o Apagando).. Para el manejo de las 25 funciones se realizaran mediante el diseño de cuatro tarjetas electrónicas: 1. Tarjeta de teclado. 2. Tarjeta de monitoreo. 3. Tarjeta de cerebro. 4. Tarjeta de relés.. 3.1.2. TARJETA DE TECLADO. Para el manejo de las 25 funciones debemos contar con un teclado 9 matricial que cuente con 5 filas y 5 columnas, para esto se observo los requerimientos de la Corporación Electrónica TELEVID y se tuvo el siguiente modelo.. _____________________ 9. Ver Anexo A.
(49) Figura 3.1: Frente del Panel Digital. 40.
(50) 41. En el gráfico anterior se indica el frente del tablero digital e indica las funciones que se desea manejar, en el frente se observa 22 teclas por lo que por tres teclas deben cumplir doble función es decir activar dos funciones. 3.1.2.1.. Descripción de los componentes del teclado. El teclado del Panel Digital tiene la siguiente distribución: Tabla 3.2: Tabla de distribución de teclas en la tarjeta de teclado. COLUMNA 1. COLUMNA 2. COLUMNA 3. COLUMNA 4. COLUMNA 5. FILA 1. Tecla 1. Tecla 2. Tecla 3. Tecla 4. Tecla 5. FILA 2. Tecla 6. Tecla 7. Tecla 8. Tecla 9. Tecla 10. FILA 3. Tecla 11. Tecla 12. Tecla 13. Tecla 14. Tecla 15. FILA 4. Tecla 16. Tecla 17. Tecla 18. Tecla 19. Tecla 20. FILA 5. Tecla 21. Tecla 22. -. -. -. Las filas y columnas serán controladas por el microcontrolador (ATMEGA -16) que se encuentra en la tarjeta del cerebro, el teclado será manejado por 10 pines del micro controlador, por tener 5 filas y 5 columnas. Tabla 3.3: Tabla de direccionamiento del teclado hacia el microcontrolador. CONEXIÓN. PIN MICRO CONTROLADOR. Columna 1. Pin # 18 (PD4). Columna 2. Pin # 19 (PD5). Columna 3. Pin # 17 (PD3). Columna 4. Pin # 20 (PD6). Columna 5. Pin # 16 (PD2). Fila 1. Pin # 14 (PD0). Fila 2. Pin # 08 (PB7). Fila 3. Pin # 15 (PD1). Fila 4. Pin # 07 (PB6). Fila 5. Pin # 06 (PB5).
(51) 42. CONEXION TECLADO EN EL ATMEGA-16 COLUMNA 1. COLUMNA 2. COLUMNA 3. COLUMNA 4. COLUMNA 5. FILA 1. 9 13 12. FILA 2. 40 39 38 37 36 35 34 33. FILA 3. FILA 4. FILA 5 R5 5k6 R4 5k6 R3 5k6 R2 5k6. 1 2 3 4 5 6 7 8. RESET XTAL1 XTAL2 PA0/ADC0 PA1/ADC1 PA2/ADC2 PA3/ADC3 PA4/ADC4 PA5/ADC5 PA6/ADC6 PA7/ADC7 PB0/XCK/T0 PB1/T1 PB2/INT2/AIN0 PB3/OC0/AIN1 PB4/SS PB5/MOSI PB6/MISO PB7/SCK ATMEGA16. PC0/SCL PC1/SDA PC2/TCK PC3/TMS PC4/TDO PC5/TDI PC6/TOSC1 PC7/TOSC2 PD0/RXD PD1/TXD PD2/INT0 PD3/INT1 PD4/OC1B PD5/OC1A PD6/ICP PD7/OC2. AVCC AREF. 22 23 24 25 26 27 28 29 14 15 16 17 18 19 20 21. 30 32. ATMEGA-16. R1 5k6. Figura 3.2: Diagrama de conexión del teclado hacia el microcontrolador 3.1.3. TARJETA DE MONITOREO En la tarjeta de monitoreo10 es en donde se visualiza qué función se encuentra activada o desactivada dependiendo de la tecla que se ha presionado, también encontramos la pantalla LCD donde nos indicara en forma de mensaje de texto que se está realizando, encendiendo o apagando una función, los mensajes en el LCD se visualizaran siempre y cuando el autobús se encuentre encendido, la alimentación para los LED’s de la tarjeta de monitoreo son de batería, y la alimentación de la pantalla LCD es del voltaje de contacto del autobús. Para la activación de los LED’s se realiza mediante la tarjeta del cerebro del panel digital, por lo que está es la que envía la señal para la activación de los LED’s.. _____________________ 10. Ver Anexo B.
(52) V. BATERIA. V. Contacto. 1k. R23 10 R. D1 4004. R24. LM016L. VSS VDD VEE. D4. D3. D2. D1. 1 2 3. RS RW E R1. R1. R1. R1. 4 5 6. D0 D1 D2 D3 D4 D5 D6 D7. 3K3. 3K3. 3K3. 3K3. R1. R1. R1. R1. 3K3. 3K3. 3K3. 3K3. D11. D10. D9. R1. R1. R1. ATMEGA16. 3K3. 3K3. D14. D13. D12. PB0/XCK/T0 PB1/T1 PB2/INT2/AIN0 PB3/OC0/AIN1 PB4/SS PB5/MOSI PB6/MISO PB7/SCK. PA0/ADC0 PA1/ADC1 PA2/ADC2 PA3/ADC3 PA4/ADC4 PA5/ADC5 PA6/ADC6 PA7/ADC7. XTAL1 XTAL2. RESET. ATMEGA 16. 3K3. 1 2 3 4 5 6 7 8. 40 39 38 37 36 35 34 33. 13 12. 9. R1. R1. R1. 3K3. 3K3. 3K3. AVCC AREF. PD0/RXD PD1/TXD PD2/INT0 PD3/INT1 PD4/OC1B PD5/OC1A PD6/ICP PD7/OC2. PC0/SCL PC1/SDA PC2/TCK PC3/TMS PC4/TDO PC5/TDI PC6/TOSC1 PC7/TOSC2. 30 32. 14 15 16 17 18 19 20 21. 22 23 24 25 26 27 28 29. CONEXION TARJETA DE MONITOREO. SEÑ AL TARJETA CEREBRO. SEÑ AL TARJETA CEREBRO. SEÑ AL TARJETA CEREBRO. SEÑ AL TARJETA CEREBRO. D18. D17. D16. D15. R1. R1. R1. R1. Figura 3.3: Diagrama de conexión tarjeta de monitoreo. D8. D7. D6. D5. 7 8 9 10 11 12 13 14. LCD1. 3K3. 3K3. 3K3. 3K3. D22. D21. D20. D19. R1. R1. R1. R1. 3K3. 3K3. 3K3. 3K3. 43. SEÑ AL TARJETA CEREBRO. SEÑ AL TARJETA CEREBRO.
(53) 44. El LCD utilizara 6 pines del micro controlador ATMEGA 16 para el manejo de datos. Tabla 3.4: Tabla de direccionamiento del LCD hacia el micro controlador. CONEXXION. PIN MICRO CONTROLADOR. Enable (LCD). Pin # 39 (PA1). RS (LCD). Pin # 40 (PA0). RB4 (LCD). Pin # 38 (PA2). RB5 (LCD). Pin # 37 (PA3). RB6 (LCD). Pin # 36 (PA4). RB7 (LCD). Pin # 35 (PA5). 3.1.4. TARJETA DE CEREBRO 3.1.4.1. Descripción La tarjeta de cerebro11 es donde se encuentra la mayoría de la circuitería electrónica, en donde encontramos los elementos de manejo de datos, el micro controlador ATMEGA-16, los registros de desplazamiento 74HC595, los amplificadores ULN 2803, los reguladores de voltaje 7805, etc. Para lo cual a continuación vamos a nombrar las características principales de cada uno de ellos. 3.1.4.1.1.. Características ATMEGA-1612. De alto rendimiento y bajo consumo AVR 8-bit Microcontrolador Advanced RISC Arquitectura -131 Instrucciones de gran alcance - la mayoría simple de reloj ciclo de ejecución _____________________ 11. Ver Anexo C. 12. http://translate.google.com.ec/translate?hl=es&langpair=en|es&u=http://www.futurle. c.com/Atmel/ATMEGA16.shtml.
(54) 45. - 32 x 8 Registros de uso general de Trabajo - Hasta 6 MIPS de procesamiento en 16MHz - Funcionamiento totalmente estática - El chip de 2-ciclo Multiplicador No volátil de datos y programa de recuerdos - 16K bytes de In-System Self-Programmable Flash - Opcional con la sección del código de arranque Bits Independiente de bloqueo - 512K Bytes EEPROM - Bloqueo de programación de software de seguridad JTAG (IEEE Std. 1149,1 RoHS) Interfaz - Límite de escaneo Capacidades De acuerdo con el estándar JTAG - Amplia on-chip de depuración de Apoyo - La programación de Flash, EEPROM, fusibles, y los bits de bloqueo a través de la interfaz de JAGS Características periféricas - El chip comparador analógico - Watchdog Timer programable con distintos on-chip oscilador - Interfaz de maestro / esclavo SPI Serial - Dos 8-bit Timer / Contadores con distintos Prescalar, Comparación - Un 16-bit temporizador / contador con Separa PRESCALER, comparar y modo de captura - Tiempo Real Contra el oscilador independiente - Cuatro canales de PWM - 8- canales, 10-bit ADC.
(55) 46. - Byte orientadas Dos cables de interfaz serie - USART serie programable Características especiales Microcontrolador - Power-on Reset y programable Brown-out de detección - Interior calibrada Oscilador RC - Interna y externa fuentes de interrupción - Seis modos de espera: Libre, ADC reducción de ruido, ahorro de energía, apagado, espera, espera, y extendido Entradas / Salidas y Paquetes - 32 Líneas programables entrada / salida - 40-pin PDIP, 44-DIP plomo, y 44-MLF pad Voltajes de operación - 4.5-5.5V para ATMEGA16 Los grados de velocidad -16 MHz para ATMEGA16 Consumo de energía en 4 MHz, 3V, 35 ° C - 1.1mA activo: - Modo de reposo: 0.35mA - Modo power-down: <1Ua.
(56) 47. 3.1.4.1.1.1.. Distribución de pines del ATMEGA 16 12. Figura 3.4: Distribución de pines ATMEGA 16 Tabla 3.5: Tabla distribución de pines ATMEGA-16. PIN MICRO CONTROLADOR. DESCRIPCIÓN. PIN MICRO CONTROLADOR. DESCRIPCIÓN. Pin # 01. (XCK/T0) PB0. Pin # 21. (CB2) PD7. Pin # 02. (T1) PB1. Pin # 22. (SCL) PC0. Pin # 03. (INT2/AIN0) PB2. Pin # 23. (SDA) PC1. Pin # 04. OC0/AIN1) PB3. Pin # 24. (TCK) PC2. Pin # 05. (SS) PB4. Pin # 25. (TMS) PC3. Pin # 06. (MOSI) PB5. Pin # 26. (TDO) PC4. Pin # 07. (MISO) PB6. Pin # 27. PC5 (TDI). Pin # 08. (SCK) PB7. Pin # 28. PC6 (TOSC1). Pin # 09. RESET. Pin # 29. PC7 (TOSC2). Pin # 10. VCC. Pin # 30. AVCC. Pin # 11. GND. Pin # 31. GND. Pin # 12. XTAL2. Pin # 32. AREF. Pin # 13. XTAL1. Pin # 33. PA7 (ADC7). Pin # 14. (RXD) PD0. Pin # 34. PA6 (ADC6). Pin # 15. (TXD) PD1. Pin # 35. PA5 (ADC5). Pin # 16. (INT0) PD2. Pin # 36. PA4 (ADC4). Pin # 17. (INT1) PD3. Pin # 37. PA3 (ADC3). Pin # 18. (OC1B) PD4. Pin # 38. PA2 (ADC2). Pin # 19. (OC1A) PD5. Pin # 39. PA1 (ADC1). Pin # 20. (ICP1) PD6. Pin # 40. PA0 (ADC0).
(57) 48. 3.1.4.1.1.2.. Descripción de pines13. VCC: Tensión de alimentación digital GND: TIERRA Port A (PA7.. PA0): El pórtico A sirve de las entradas analógicas a los convertidores A / D. El pórtico A es un puerto de 8-bit bi-direccional de I / O del puerto, si el convertidor A / D no se utiliza. Cuando los pines PA0 a PA7 se utilizan como insumos en el exterior y si la fuerza interna-up resistencias se activan. Los pines de un pórtico se comportaran como convertidores. Puerto B (PB7.. PB0): El pórtico B es un puerto de 8-bit bi-direccional de I / O puerto con resistencias internas (seleccionados por cada bit). El Buffers de salida del puerto B tiene características de conducción de simetría, Como entradas no se activan las resistencias internas de pull-up. Si son activadas las resistencias de pull-up se tiene diferente comportamiento del pórtico B como interrupciones es importante tener en cuenta, en el pórtico B se encuentran los pines de grabación de micro controlador los cuales son MISO, MOSI, SCK Puerto C (PC7.. PC0): El pórtico C es un puerto de 8-bit bi-direccional de I / O con resistencias internas (seleccionados por cada bit). El Buffers de salida del puerto C tiene características de conducción de simetría, Puerto C sirve también de las. _____________________ 13. Ver Anexo D.
(58) 49. funciones de la interfaz JTAG y otras características especiales de la ATMEGA16, dependiendo de de las resistencias de pull-up si son activadas o desactivadas se comporta diferente el puerto C microcontrolador PC5 (TDI), PC3 (TMS) y PC2 (TCK). Puerto D (PD7.. PD0): El pórtico D es un puerto de 8-bit bi-direccional de I / O con resistencias internas (seleccionados por cada bit). El Buffers de salida del puerto d tiene características de conducción de simetría, El puerto D sirve también con diversas funciones dependiendo si son activadas las resistencias de pull-up como interrupciones, Tx y Rx con otros microscontroladores conectados. RESET: Entrada de reset. Un nivel bajo de este pin por más de la longitud de pulso mínimo generará un restablecimiento en el microcontrolador. XTAL1: De entrada al amplificador oscilador inversora y la entrada al circuito de reloj interno de funcionamiento. XTAL2: Salida del amplificador oscilador inversora. AVCC: AVCC es el pin de tensión de alimentación para un puerto y el A / D Convertidor. AREF: Aref es el pin de referencia analógica para el A / D Convertidor.. 3.1.4.1.2.. Registro 74HC595 características 43. El circuito integrado 74HC595 es un registro de desplazamiento que tiene ingrese de datos en serie y la salida de datos en paralelo, para el desplazamiento de los datos el circuito integrado posee un pin para la señal de reloj y empujar los datos, también _____________________ 14. Ver Anexo E.
(59) 50. posee un pin de STROBE para la salida de los datos en paralelo, un pin de ENABLE para habilitar o deshabilitar el registro, un pin de MASTER RESET el cual limpiara los datos del registro, un pin de datos de entrada serial, 8 pines de salida de datos en paralelo, pines de alimentación Vcc y GND en total se tiene 16 pines del circuito integrado. Figura 3.5: Distribución de pines ATMEGA 16 Tabla 3.6: Tabla distribución de pines 74HC595. PIN REGISTRO. DESCRIPCIÓN. PIN REGISTRO. DESCRIPCIÓN. Pin # 01. Q1(OUT PARALELO). Pin # 09. DAT OUT (Q7'). Pin # 02. Q2(OUT PARALELO). Pin # 10. MASTER RESET. Pin # 03. Q3(OUT PARALELO). Pin # 11. CLOCK. Pin # 04. Q4(OUT PARALELO). Pin # 12. STROBE. Pin # 05. Q5(OUT PARALELO). Pin # 13. ENABLE. Pin # 06. Q6(OUT PARALELO). Pin # 14. DATA IN (IN SERIAL). Pin # 07. Q7(OUT PARALELO). Pin # 15. Q0(OUT PARALELO). Pin # 08. GND. Pin # 16. Vcc.
(60) 51. Figura 3.6: Diagrama de manejo de señales del 74HC595. 3.1.4.1.3.. Características ULN 2803. 15. Este pequeño dispositivo pero de gran ayuda es muy útil cuando usamos los Microcontrolador. El ULN2803 tiene internamente 8 transistores Darlingtons con su respectivo diodo de protección, este maneja una corriente hasta los 500mA, voltaje de salida hasta 50V, _____________________ 15. Ver Anexo F.
(61) 52. este circuito integrado tiene 18 pines los cuales 8 son entradas, 8 son salidas, un pin de GND y un pin de voltaje común para las 8 entradas/salidas.. Figura 3.7: Diagrama de una entrada y salida del ULN2803. Figura 3.8: Distribución de pines del ULN2803 Tabla 3.7: Tabla distribución de pines ULN2803. PIN ULN2803. DESCRIPCION. PIN ULN2803. DESCRIPCION. Pin # 01. IN 1. Pin # 10. COMUN. Pin # 02. IN 2. Pin # 11. OUT 8. Pin # 03. IN 3. Pin # 12. OUT 7. Pin # 04. IN 4. Pin # 13. OUT 6. Pin # 05. IN 5. Pin # 14. OUT 5. Pin # 06. IN 6. Pin # 15. OUT 4. Pin # 07. IN 7. Pin # 16. OUT 3. Pin # 08. IN 8. Pin # 17. OUT 2. Pin # 09. GND. Pin # 18. OUT 1.
Figure


+7





Documento similar
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
El nuevo Decreto reforzaba el poder militar al asumir el Comandante General del Reino Tserclaes de Tilly todos los poderes –militar, político, económico y gubernativo–; ampliaba
De acuerdo con Harold Bloom en The Anxiety of Influence (1973), el Libro de buen amor reescribe (y modifica) el Pamphihis, pero el Pamphilus era también una reescritura y
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Partiendo de las ideas sobre el liberalsocialismo en el pensamiento de Norberto B OBBIO y hallando en el ámbito del constitucionalismo el terreno propicio, no ya para un
Para denegación hegeliana del mal: «Así como no existe lo fal- so, no existe el mal, es objetada primero por Sade y luego por la subjetividad romántica: en la mé- dula de la
