Diseño y construcción de un vehículo solar híbrido
162
0
0
Texto completo
(2)
(3) Diseño y construcción de un vehículo solar híbrido. Edgar Alonso Salazar Marín Juan Felipe Arroyave Londoño Ángel Andrés Vásquez Ospina. Colección de Trabajos de Investigación Facultad de Tecnología 2016.
(4) Salazar Marín, Edgar Alonso Diseño y construcción de un vehículo solar híbrido / Edgar Alonso Salazar Marín, Juan Felipe Arroyave Londoño y Angel Andrés Vásquez Ospina. – Pereira : Editorial Universidad Tecnológica de Pereira, 2016. 157 páginas : ilustraciones. – (Colección trabajos de investigación). ISBN: 978-958-722-268-5. eISBN: 978-958-722-358-3 1. Vehículo solar híbrido 2. Motor Solar 3. Energía solar fotovoltaica 4. Sistemas de propulsión 5. Motores eléctricos 6. Diseño en ingeniería CM. 629.2293. ©Edgar Alonso Salazar Marín ©Juan Felipe Arroyave Londoño ©Ángel Andrés Vásquez Ospina ©Universidad Tecnológica de Pereira Primera edición Universidad Tecnológica de Pereira Pereira, Colombia ISBN: 978-958-722-268-5 eISBN: 978-958-722-358-3 Proyecto de investigación: “Diseño y construcción de un vehículo solar híbrido” Proyecto financiado por Colciencias y la Vicerrectoría de Investigaciones, Innovación y Extensión de la Universidad Tecnológica de Pereira Convocatoria año 2016 Universidad Tecnológica de Pereira Vicerrectoría de Investigaciones, Innovación y Extensión Editorial Universidad Tecnológica de Pereira Coordinador editorial: Luis Miguel Vargas Valencia [email protected] Tel: 3137381 Edificio 9 Biblioteca central “Jorge Roa Martínez” 9/N1/110 Cra 27 No. 10-02 Los Álamos Pereira, Colombia www.utp.edu.co Montaje y producción: Centro de Recursos Informáticos y Educativos CRIE Universidad Tecnológica de Pereira Impresión y acabados: Publiprint S.A.S. Pereira. Reservados todos los derechos.
(5)
(6)
(7) C ON T E N I D O Introducción ...................................................................................................................................... 9 1. Análisis estático y dinámico del carro solar ................................................................................ 15 1.1 Cargas debidas al peso y centro de gravedad ........................................................................... 15 1.2 Cargas resistivas del vehículo en movimiento ..................................................................17 1.2.1 Fuerza debida a la pendiente ................................................................................................. 17 1.2.2 Fuerza debida a la rodadura..................................................................................................... 17 1.2.3 Fuerza debida a efectos aerodinámicos.................................................................................. 18 1.3 Fuerza de Tracción...................................................................................................................... 19 1.4 Potencia requerida para el movimiento del vehículo .............................................................. 20 1.5 Par motriz................................................................................................................................... 21 2. Diseño conceptual del vehículo.................................................................................................... 27. 2.1 Requerimientos de diseño.......................................................................................................... 29 2.2 Análisis de alternativas............................................................................................................... 35 2.2.1 Configuración............................................................................................................................ 35 2.2.2 Chasis.......................................................................................................................................... 38 2.2.3 Sistema de dirección .................................................................................................................39 2.2.4 Transmisión de potencia.......................................................................................................... 41 2.2.5 Suspensión.................................................................................................................................. 43 2.2.6 Fuente eléctrica de potencia..................................................................................................... 45 2.2.7 Almacenamiento....................................................................................................................... 47 2.3 Evaluación y selección de las alternativas................................................................................. 48 2.4 Diseño preliminar....................................................................................................................... 52 2.4.1 Chasis ..........................................................................................................................................52 2.4.2 Sistema de dirección................................................................................................................. 75 2.4.3 Suspensión.................................................................................................................................. 83 2.4.4 Análisis ergonómico (diseño de silla).................................................................................... 87 2.4.5 Sistema de tracción................................................................................................................... 90 2.4.6 Selección de paneles y baterías ............................................................................................... 95 2.4.7 Carenado.................................................................................................................................... 98 2.4.8 Análisis aerodinámico............................................................................................................ 100 2.4.9 Diseño del sistema eléctrico................................................................................................... 102 3. Fabricación y ensamble del vehículo.......................................................................................... 109 3.1 Manufactura de piezas y ensamble mecánico......................................................................... 109 3.2 Manufactura de silla y carenado.............................................................................................. 118 4. Pruebas de validación del vehículo............................................................................................ 125 4.1 Pruebas de tipo estático............................................................................................................ 125 4.2 Pruebas de tipo dinámico........................................................................................................ 130 4.3 Experiencia, Carrera solar del desierto de atacama ............................................................... 136 Conclusiones.................................................................................................................................. 143 Referencias ..................................................................................................................................... 147 Anexos............................................................................................................................................ 152.
(8) NOME NC L AT U R A W. Peso del vehículo. F1. Reacción en apoyo rueda trasera. F2. Fuerza en apoyo rueda delantera. θ. Ángulo de pendiente. C.G. Centro de masas o centro de gravedad. L. Longitud entre ejes delantero y trasero. L1. Distancia entre centro de gravedad y eje trasero. L2. Distancia entre centro de gravedad y eje delantero. hC. Altura centro de gravedad. F1. Reacción en rueda trasera, vehículo sobre plataforma para medir hC. F2*. Reacción en rueda delantera, vehículo sobre plataforma para medir hC. m. Número de ruedas traseras. n. Número de ruedas delanteras. R1. Radio rueda trasera. R2. Radio rueda delantera. Fr. Fuerzas debidas a la rodadura. Fθ. Fuerzas debidas a la pendiente. Fa. Fuerzas por efectos aerodinámicas. FT. Fuerza de tracción. Φ. Ángulo vehículo para medición de hC. N. Fuerza normal. Cr. Coeficiente de rodadura. ρ. Densidad del aire. S. Sección transversal del vehículo. V. Velocidad del vehículo. Ka. Coeficiente de penetración aerodinámica. RT. Radio de rueda de tracción. TT. Par en la rueda de tracción. m. Masa total del vehículo. a. aceleración. W. Potencia. T. Par de torsión. ω. Velocidad angular. *.
(9) η. Eficiencia. G. Relación de Transmisión. E. Módulo de elasticidad. σu. Esfuerzo último. σy. Esfuerzo de Fluencia. σmax. Esfuerzo Máximo. σmin. Esfuerzo mínimo. τ. Esfuerzo Cortante. Mmax. Momento máximo. ky. Rigidez Torsional. I. Momento de inercia. Y. Distancia desde la base al centroide de la sección transversal. α. Ángulo de deformación debido a la Torsión. Defmax. Deformación máxima. At. Ancho de trocha. rs. Radio de pivote. δe. Ángulo de giro externo. δi. Ángulo de giro interno. k. Longitud bieleta. q. Longitud barra de acoplamiento. NM. Frecuencia rotacional eje motriz. NN. Frecuencia rotacional eje de tracción.
(10)
(11) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Introducción Actualmente el país viene creando las bases para una política que permita promover el uso de las energías renovables, es el caso de la Ley 1715 “Por medio de la cual se regula la integración de las energías renovables no convencionales al Sistema Energético Nacional”. No obstante, los intereses económicos en la explotación rentable de recursos hidráulicos y térmicos (poco consecuentes en las políticas ambientales) serán siempre una amenaza a tecnologías que usen fuentes renovables. En otras palabras se priorizará siempre lo económico por encima de lo ambiental y social. Es necesario entonces enfocar esfuerzos para desarrollar aplicaciones que muestren la verdadera utilidad que puede tener este tipo de tecnologías. Un Carro Híbrido Solar era la gran oportunidad para este objetivo. El semillero de investigación en Energías Renovables del programa de Tecnología Mecánica de la Universidad Tecnológica de Pereira, ha venido desarrollando desde hace algunos años diferentes aplicaciones en el contexto de las energías renovables, entre ellas: Colectores solares de placa plana y tubo evacuado, aerogeneradores de pequeña escala, ariete hidráulico, monitoreo remoto de sistemas fotovoltaicos, etc. los cuales muestran que con un desarrollo tecnológico propio se pueden obtener resultados verdaderamente útiles. Ejemplo de ello son las viviendas ecosostenibles de material reciclado y energías renovables para una fundación donde una población considerable se ha visto beneficiada. Un carro solar híbrido era la mejor alternativa de poner a prueba conocimientos científicos materializados mediante un vehículo monoplaza útil para un contexto geográfico como Colombia. Ya los vehículos de Propulsión humana han despertado interés desde hace muchos años, hasta el punto que han creado asociaciones internacionales como WHPVA1 (World Human PoweredVehiclesAssociation). Esta es una federación internacional de asociaciones que promueven el desarrollo de “vehículos de tracción humana” y organiza eventos deportivos principalmente en Europa. Si bien la mayor parte de su labor se relaciona con el desarrollo 1. http://www.whpva.org/. 9.
(12) Diseño y construcción de un vehículo solar híbrido.. de la “bicicleta” (particularmente la reclinada, por ser la más veloz), también promueve la investigación en embarcaciones y aviones o “dirigibles” de propulsión humana. Hasta el año 2008, su nombre oficial era International Human PoweredVehiclesAssociation o IHPVA. Este libro pretende dejar las bases conceptuales empleadas en el diseño y concepción del vehículo solar XUE 2 que participó en la Competencia Internacional del Desierto de Atacama en Chile y que fue desarrollado mediante sinergias científico-técnicas con equipos de trabajo de la Universidad Tecnológica de Pereira y el Servicio Nacional de Aprendizaje SENA (Dosquebradas). El carro solar XUE ha sido una apuesta tecnológica y un reto de tipo logístico y técnico. En él participaron tanto estudiantes como profesores de la universidad y el SENA. El Desierto de Atacama (el más árido del mundo) fue el lugar donde por primera vez un equipo colombiano participaba en una Carrera Internacional de Carros Solares, en la cual el equipo SENA-UTP tuvo, con su vehículo XUE, una excelente participación. Sin embargo debemos resaltar que el vehículo solar tiene una proyección que va más allá de participar en una competición. Se espera que el vehículo híbrido solar descrito en este libro sea el punto de partida para una línea de desarrollo en vehículos híbridos que puedan movilizarse con suficiencia en nuestras carreteras y ciudades, como apuesta decidida al transporte sostenible, representando un aporte fundamental a la mitigación del cambio climático. La Carrera Solar de Atacama (www.carrerasolar.com) es una competencia realizada cada dos años, en donde Universidades e Instituciones Tecnológicas de todo el mundo ponen a prueba diferentes diseños de vehículos solares e híbridos, puestos a prueba en un desierto agreste bajo condiciones atmosféricas complejas, incentivando la capacidad científica e ingenio para desarrollar prototipos eficientes que cumplan con especificaciones de competencia, y a la vez sirvan de motivación y reflexión a una sociedad que requiere ser cada vez más sostenible. Este libro se ha desarrollado en 4 capítulos. En el primero se presentan aspectos conceptuales de la dinámica de tracción de vehículos como base de análisis para el XUE. En el segundo capítulo se hace un análisis de todas las fases de diseño de vehículo desde la clarificación de la necesidad, análisis de alternativas hasta realizar la propuesta final, integrando los diferentes sistemas que conforman el vehículo. El tercer capítulo presenta la materialización de los diseños propuestos mostrando las diversas etapas de fabricación en la ruta de producción y ensamble del vehículo. Un cuarto capítulo busca validar tanto el comportamiento del vehículo esperado como la medición de algunos parámetros proyectados en el capítulo dos de diseño. Al final del documento se presenta una síntesis de la experiencia vivida en la Carrera Solar del desierto de Atacama, convirtiéndose más que formativa en una experiencia de vida.. 2. 10. Dios del sol para la cultura muisca..
(13)
(14)
(15) CAPÍTULO UNO.
(16)
(17) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 1.. ANÁLISIS ESTÁTICO Y DINÁMICO DE UN VEHÍCULO. Existen múltiples fuentes que analizan la estática y dinámica de un vehículo en movimiento de forma muy detallada [1], [2], [3]. La complejidad radica en la variedad y cantidad de conceptos que debe involucrar un análisis integral de todos los sistemas presentes en un vehículo. En este libro se citarán solo algunos conceptos fundamentales implicados en la determinación de las fuerzas restrictivas presentes, analizadas en la dirección del movimiento. Este análisis unidireccional también es desarrollado por diversos autores [4], [5], [6]. 1.1 Cargas debidas al peso y centro de gravedad La Figura 1.1 presenta el diagrama de cuerpo libre de un vehículo sobre una pendiente (ubicación generalizada para el análisis), con las cargas debidas al peso propio.. Figura 1.1 Cargas estáticas debidas al peso de un vehículo sobre pendiente Haciendo análisis de equilibrio se determinan las reacciones F1 y F2: 𝐹𝐹1 =. 𝑊𝑊𝐿𝐿2 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃 𝐿𝐿. , 𝐹𝐹2 =. 𝑊𝑊𝐿𝐿1 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃 𝐿𝐿. (1.1). Ahora, para determinar en términos prácticos la ubicación del centro de gravedad de un vehículo, a partir de la medición de la fuerza en apoyos, es necesario dejar la expresión en términos de las longitudes: 𝐿𝐿1 =. 𝐹𝐹2 𝐿𝐿. 𝑊𝑊 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃. , 𝐿𝐿2 =. 𝐹𝐹1 𝐿𝐿. 𝑊𝑊 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃. (1.2). Para la determinación de la altura del Centro de Gravedad hC se pueden emplear métodos experimentales. Uno de los métodos [1, Pg 42] consiste en montar el vehículo sobre una plataforma (Figura 1.2). Las llantas delanteras deben ser bloqueadas (sin giro) mientras las ruedas traseras deben quedar con movimiento libre. Conocida la ubicación lateral (L1, L2) se puede determinar la altura hC, 7. 15.
(18) Diseño y construcción de un vehículo solar híbrido.. utilizando ecuaciones de equilibrio estático sobre el centro de gravedad C.G. Esto es, suma de fuerzas (1.3) y suma de momentos (1.4).. Figura 1.2 Esquema de montaje para medición de altura del centro de gravedad ∑ 𝐹𝐹𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣𝑣 = 𝑚𝑚𝐹𝐹1∗ + 𝑛𝑛𝐹𝐹2∗ − 𝑊𝑊 = 0. (1.3). Siendo m, n número de ruedas traseras y delanteras respectivamente, y F1* y F2* fuerzas sobre los apoyos en esta ubicación particular (Figura 1.2). ∑ 𝑀𝑀𝐶𝐶𝐶𝐶 = 𝑛𝑛𝐹𝐹2∗ [𝐿𝐿2 cos ∅ + (ℎ − 𝑅𝑅2 ) sin ∅] − 𝑚𝑚𝐹𝐹1∗ [𝐿𝐿1 cos ∅ − (ℎ − 𝑅𝑅1 ) sin ∅] = 0 (1.4). Siendo R1, R2 los radios de las ruedas trasera y delantera respectivamente. Haciendo uso de las expresiones anteriores se obtiene el valor de hC. ℎ𝐶𝐶 =. 𝑛𝑛𝐹𝐹2∗ (𝑅𝑅2 sin ∅−𝐿𝐿2 cos ∅)+𝑚𝑚𝐹𝐹1∗ (𝑅𝑅1 sin ∅+𝐿𝐿1 cos ∅) 𝑊𝑊 sin ∅. (1.5). Si como caso particular las ruedas tienen el mismo radio y la longitud entre ruedas es L = L1 + L2, se obtiene: ℎ𝐶𝐶 = [. 𝑚𝑚𝐹𝐹1∗ 𝐿𝐿 𝑊𝑊. − 𝐿𝐿2 ] cot ∅. (1.6). Esta expresión simplifica el cálculo, dependiendo de los parámetros geométricos conocidos y de la medición de la carga en el apoyo en una de las ruedas traseras. Existen otras formas de determinar el Centro de masas haciendo uso de herramientas CAD o realizando mediciones experimentales, mediante la suma de productos de centros de gravedad por las masas respectivas conocidas.. 16 8.
(19) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 1.2. Cargas resistivas del vehículo en movimiento. El análisis de fuerzas resistivas pretende determinar la potencia requerida de la unidad motora en función de todos los parámetros de carga involucrados [4]. Las cargas presentes en un vehículo en dirección al movimiento son básicamente: Fuerza debida a la pendiente FΘ Fuerza debida a la rodadura Fr Fuerza por efectos aerodinámicos Fa Fuerza de tracción FT. Figura 1.3 Fuerzas presentes en un vehículo en dirección al movimiento 1.2.1 Fuerza debida a la pendiente FΘ Con base en la figura 1.3, se obtiene la fuerza debida a pendiente 𝐹𝐹𝜃𝜃 = 𝑊𝑊 sin 𝜃𝜃. (1.7). Cabe mencionar que cuando el vehículo está en pendiente negativa esta fuerza deja de ser resistiva para convertirse en un aporte a la potencia neta del motor. 1.2.2 Fuerza debida a la rodadura Fr Esta fuerza está relacionada con el efecto resistivo presente debido a la deformación existente entre el elemento rodante (llanta) y la superficie de apoyo. Una llanta sin la presión de aire suficiente genera una carga resistiva mayor. La figura 2 presenta el esquema de fuerzas sobre una llanta.. Fr N Figura 1.4 Fuerza de rodadura 9. 17.
(20) Diseño y construcción de un vehículo solar híbrido.. La fuerza de rodadura, tal como las fuerzas de fricción, es proporcional a la fuerza normal en el punto de contacto. 𝐹𝐹𝑟𝑟 = 𝐶𝐶𝑟𝑟 𝑁𝑁 = 𝐶𝐶𝑟𝑟 𝑊𝑊 cos 𝜃𝜃. (1.8). Donde Cres el coeficiente de rodadura. La Tabla 1.1 [3] registra algunos valores de coeficiente de rodadura para diferentes superficies y ruedas. Tabla 1.1 Coeficientes de rodadura para diferentes superficies Coeficientes Cr 0,0002 a 0,0010 0,010 a 0,0154 0,020 0,030 a 0,035 0.055 a 0.065. Superficies de contacto Ruedas de ferrocarril sobre rieles de acero Neumáticos de automóvil sobre hormigón Neumáticos de automóvil sobre losas de piedra Neumáticos de automóvil sobre alquitrán o asfalto Neumáticos de automóvil sobre hierba, barro y arena. (Por ejemplo, un automóvil de 1000 kg sobre una carretera asfaltada plana necesita una fuerza de empuje de aproximadamente 300 N para rodar (1000 kg × 9,81 m/s 2 × 0,03 = 294,30 N). 1.2.3 Fuerza debida a efectos aerodinámicos Fa Es la fuerza que se opone al avance del cuerpo a través del viento, la cual depende de la geometría del cuerpo, de la densidad del aire ρ, y de la velocidad del viento V.. Figura 1.5 Líneas de flujo de aire en un vehículo [4] Partiendo de la energía cinética aprovechable del viento se tiene: 1. 𝐹𝐹𝑎𝑎 = 𝜌𝜌𝜌𝜌𝜌𝜌𝑎𝑎 𝑉𝑉 2 2. (1.9). Donde Ka es el coeficiente de penetración aerodinámica y S la sección transversal del vehículo perpendicular a la dirección del viento. De allí la importancia que tiene el modelado aerodinámico que tenga el vehículo para minimizar estos efectos, que se incrementan parabólicamente con la velocidad. La Tabla 1.2 registra algunos valores de Ka.. 18 10.
(21) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Tabla 1.2 Coeficientes de penetración aerodinámica para diferentes perfiles [3] Ka. Forma. Forma. Ka. Esfera. 0,47. Cilindro largo. 0,82. Media esfera. 0,42. Cilindro corto. 1,15. Cono. 0,50. Álabe. 0.04. Cubo. 1,05. Media álabe. 0,09. Dirección del viento. Ejemplos:. Vehículo A. A = 3 m2CD = 0,6. Vehículo B. A = 3 m2CD = 0,35. Para obtener el valor Ka se emplea análisis con CFD (Computational Fluid Dynamics), medición a través de túnel de viento o pruebas directamente en carretera. 1.3 Fuerza de tracción FT Para el movimiento del vehículo es necesaria la aplicación de una fuerza externa proveniente de la unidad motriz. Esta fuerza está relacionada con el radio de la rueda RT y el par de tracción. 𝐹𝐹𝑇𝑇 =. 𝑇𝑇𝑇𝑇. 𝑅𝑅𝑇𝑇. (1.10). Ahora, se utiliza la 2ª ley de Newton para relacionar las fuerzas externas sobre el vehículo ∑ 𝐹𝐹 = 𝑚𝑚 𝑎𝑎. (1.11). Siendo m la masa total del vehículo y piloto, y a la aceleración que este experimenta. De la ecuación (1.11) (Figura 1.3) se obtiene: 𝐹𝐹𝑇𝑇 − 𝐹𝐹𝜃𝜃 − 𝐹𝐹𝑟𝑟 − 𝐹𝐹𝑎𝑎 = 𝑚𝑚𝑚𝑚 𝐹𝐹𝑇𝑇 = 𝐹𝐹𝜃𝜃 + 𝐹𝐹𝑟𝑟 + 𝐹𝐹𝑎𝑎 + 𝑚𝑚𝑚𝑚 11. (1.12) (1.13). 19.
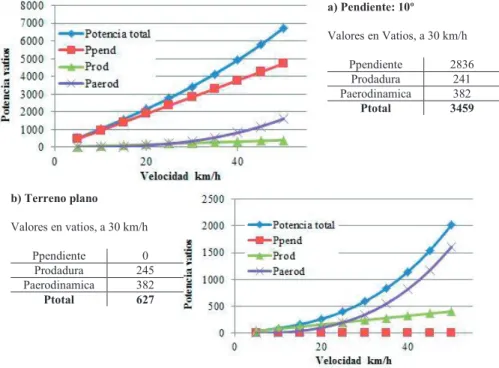
(22) Diseño y construcción de un vehículo solar híbrido.. De esta forma la fuerza de tracción se podrá determinar mediante: 1 𝐹𝐹𝑇𝑇 = 𝑊𝑊 𝑠𝑠𝑠𝑠𝑠𝑠 𝜃𝜃 + 𝐶𝐶𝑟𝑟 𝑊𝑊 𝑐𝑐𝑐𝑐𝑠𝑠 𝜃𝜃 + 𝜌𝜌𝜌𝜌𝜌𝜌𝑎𝑎 𝑉𝑉 2 + 𝑚𝑚𝑚𝑚 2. (1.14). Esta fuerza de tracción considera entonces los efectos de pendiente, rodadura, aerodinámica y los efectos inerciales unidireccionales (debidos a la presencia de aceleración). 1.4. Potencia requerida para el movimiento del vehículo. Todas las fuerzas de restricción presentes en un vehículo demandarán una potencia total que será función de la velocidad. Ya calculada la fuerza de tracción, la potencia total estará determinada por: 𝑊𝑊̇ = 𝐹𝐹𝑇𝑇 𝑉𝑉. (1.15). A partir de la ecuación (1.14) y (1.15) la potencia se convierte en: 1 𝑊𝑊̇ = (𝑊𝑊 𝑠𝑠𝑠𝑠𝑠𝑠 𝜃𝜃 + 𝐶𝐶𝑟𝑟 𝑊𝑊 𝑐𝑐𝑐𝑐𝑐𝑐 𝜃𝜃 + 𝜌𝜌𝜌𝜌𝜌𝜌𝑎𝑎 𝑉𝑉 2 + 𝑚𝑚 𝑎𝑎) × 𝑉𝑉 2. (1.16). Se incluye la componente inercial, para prever un cambio de velocidad y que podría, en el caso particular del movimiento desde el reposo, usarse para cuantificar la necesidad de potencia a suplir por el motor de combustión o eléctrico. No es usual en la literatura calcular la demanda de potencia para el vehículo con consideración de la inercia. Lo acostumbrado es, a partir de una disponibilidad de potencia del motor, determinar qué potencia le sobra en determinado cambio y con este remanente de potencia qué aceleración le puede imprimir al vehículo, qué dinamismo le puede imprimir. No obstante, en la expresión 1.16, se ha querido aportar este tratamiento. Asumiendo algunos valores en los parámetros implicados, se puede observar el comportamiento de la potencia a diferentes velocidades, observando los efectos por pendiente, rodadura y resistencia aerodinámica. Valores asumidos: Masa total del vehículo y piloto, m = 200 kg (W = 1960 N). Se supondrá pendientes entre 0o y 10o Coeficiente de rodadura (neumático sobre hormigón, Tabla 1.3), Cr = 0,015. Densidad de aire: 1,2 kg/m3, Sección de vehículo transversal: 1m2, Coeficiente Ka = 1,1. La Figura 1.6 presenta el comportamiento de la potencia como función de la velocidad para superficies plana y pendiente de 10 o (17,6 %), sin aceleración. Se describen los valores de potencia generados por cada una de las fuerzas restrictivas debidas a pendiente, rodadura y aerodinámica.. 20. 12.
(23) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Para comparar los efectos se han tomado valores en 30 km/h como velocidad de referencia. En superficies inclinadas son predominantes los efectos de pendiente sobre la potencia total. Con pendiente de 10o la potencia alcanza 3459 vatios con un aporte del factor pendiente del 82%, mientras que en terreno plano la variable aerodinámica es predominante, generando potencias de 627 vatios, con aporte del efecto aerodinámico del 61%. Esto permite priorizar los criterios a tener en cuenta para el diseño. La variable masa se vuelve entonces un factor fundamental para reducir, si se pretende minimizar la potencia requerida. Los efectos inerciales (por ejemplo en el arranque) predominan en función de la aceleración que se requiera. Una vez el vehículo está en terreno plano y se establezcan altas velocidades, la potencia se verá influenciada principalmente por las restricciones aerodinámicas. a) Pendiente: 10o Valores en Vatios, a 30 km/h Ppendiente Prodadura Paerodinamica Ptotal. 2836 241 382 3459. b) Terreno plano Valores en vatios, a 30 km/h Ppendiente Prodadura Paerodinamica Ptotal. 0 245 382 627. Figura 1.6 Comparación de potencias debidas a cada fuerza en función de la velocidad 1.5. Par motriz. En rotación, la potencia general del vehículo se analiza en la rueda de tracción y está dada por: 𝑊𝑊̇ = 𝑇𝑇 × 𝜔𝜔 (1.17). El vehículo que se analiza en este libro será de tipo “híbrido” en términos de fuerza motriz, combinando motor eléctrico con propulsión humana. Esto implicará que la potencia demandada sea un compromiso sincronizado entre la fuente primaria 13. 21.
(24) Diseño y construcción de un vehículo solar híbrido.. (motor) y la fuerza motriz humana según las capacidades límites establecidas. Ya sea con motor eléctrico o propulsión humana, el par aplicado estará definido por las relaciones de transmisión que estén implementadas entre el eje motriz (pedales o motor eléctrico) y la rueda de tracción, caso que se obviaría si el eje motriz coincide con la rueda de tracción. De esta forma el par motriz estará definido por: 𝑇𝑇𝑀𝑀 =. 𝑅𝑅𝑇𝑇. 𝜂𝜂𝜂𝜂. 𝐹𝐹𝑇𝑇. (1.18). Siendo R el radio de la rueda de tracción y 𝜂𝜂 la eficiencia de la transmisión y G la relación de transmisión (Figura 1.7). Este resultado será base de análisis de la propuesta de diseño de la relación de trasmisión para el sistema de tracción (capítulo 2). A continuación se destacan las prestaciones que pueden tener los motores eléctricos en relación a los tradicionales motores de combustión interna.. Figura 1.7 Transmisión de potencia entre eje motriz y rueda de tracción [7] En los últimos años los motores eléctricos han tenido un desarrollo tecnológico y un auge comercial cada vez mayor. A diferencia de lo que piensan muchos, los motores eléctricos tienen diversas prestaciones que aventajan de algunos aspectos a los motores de combustión internas tradicionales. La figura 1.8 presenta curvas de comportamiento de motores eléctricos y de combustión de vehículos Nissan [8].. Figura 1.8 Comportamiento del par de torsión y potencia para motor eléctrico y de combustión interna [8]. 22. 14.
(25) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. En la Figura 1.8 se pueden ver las curvas típicas de un motor eléctrico y de un motor de gasolina de 1600 cm3. Se comparan dos motores de Nissan de 109 CV de potencia. La potencia máxima es la misma, pero en realidad el motor eléctrico es más potente en casi todas las circunstancias: hasta 1000 min-1 ofrece más del triple de potencia, hasta 2000 min-1 más del doble y aunque las curvas se van acercando hacia las 6000 min-1, el de gasolina corta a 6500 min-1 y el del Leaf aún ofrece su potencia máxima hasta 9800 min-1 y gira hasta las 10400 min-1. Por eso cuando la gente prueba un coche eléctrico por primera vez, se sorprende por la sensación de potencia a velocidades bajas o medias. No es una sensación, es real. Son mucho más potentes que un vehículo térmico equivalente en esas condiciones [8].. 23 15.
(26)
(27) CAPÍTULO DOS.
(28)
(29) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 2. DISEÑO CONCEPTUAL DEL VEHÍCULO La estrategia de diseño adoptada ha sido la metodología de Nigel-Cross [9], que establece un modelo racional y sistemático, facilitando la búsqueda de soluciones potenciales, el trabajo en equipo y la toma de decisiones. Como toda metodología, no representa la única respuesta y, debido a que existen diferentes modelos que bajo su estructura lógica involucran otros criterios, se adopta entonces una combinación que complemente los puntos débiles del modelo escogido. Las etapas que resumen la metodología de diseño Nigel-Cross se sintetizan en la Figura 2.1 Identificación de objetivos (árbol de objetivos). Generación de alternativas. Evaluación de alternativas. Figura 2.1 Etapas de diseño (metodología Nigel Cross) [9] Como complemento se empleará la metodología de Pahl&Beitz [10], que considera la retroalimentación en cada una de las etapas de diseño para verificar el cumplimiento de las especificaciones, además de involucrar la viabilidad económica como etapa fundamental del diseño. El esquema de la Figura 2.2 muestra las etapas implícitas en el modelo de diseño de Pahl&Beitz. Para ajustarse a las metodologías de diseño propuestas de la mejor manera, se establecerán las especificaciones de diseño definiendo el árbol objetivo, se plantearán las alternativas posibles a implementar, para seleccionar finalmente las más adecuadas, teniendo en cuenta los criterios de confiabilidad (estabilidad, resistencia mecánica, balance energético), funcionalidad, modularidad, bajo peso, ergonomía, estética, costo y disponibilidad en el mercado.. 27.
(30) Necesidades cliente (especificaciones de producto). . Clarificar necesidades Elaborar especificaciones. Clarificación de necesidades. Diseño y construcción de un vehículo solar híbrido.. . Identificar problemas esenciales Establecer la estructura funcional Búsqueda de soluciones principales Elaborar y combinar variantes de conceptos Evaluar contra criterios económico y técnicos. Diseño conceptual. Especificación. . Desarrollar las configuraciones preliminares y formas de diseño Seleccionar la mejor configuración preliminar Refinar y evaluar contra criterios económicos y técnicos. Diseño de realizaci ón. Información: validar con especificación. Concepto. Configuración preliminar. . Optimizar y completar las formas de diseño Comprobar errores y efectividad Preparar la lista preliminar de piezas y documentos de producción. . Finalizar detalles Completar detalles de dibujos y documentos de producción Comprobar documentos. Documentación. SOLUCIÓN. Figura 2.2 Estructura de diseño según Pahl&Beitz [10][11]. 28 17. Diseño de Detalle. Configuración definitiva.
(31) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 2.1 Requerimientos de diseño Los objetivos a plantear están determinados inicialmente por especificaciones de la competencia “La Carrera Solar de Atacama”. No obstante, es necesario proyectar el vehículo de tal forma que cumpla con las exigencias de carga propias de una ciudad promedio colombiana como es Pereira (Risaralda). Las especificaciones de competencia se resumen en la Tabla 2.1. Tabla 2.1 Especificaciones generales del vehículo Especificaciones CHASIS. SISTEMA ELÉCTRICO OTROS. Valores límites largo 5m y ancho Dimensión máxima 2m Ancho de trocha 1,2 a 1,6 m Distancia mínima entre ejes 1,5 m Barras estructurales antivuelco Superficie de panel máximo 4 m2 Almacenamiento máximo 1500 Wh Reglamentarias para Luces carretera Peso del piloto mínimo o en su 80 kg defecto completar con lastre Costo máximo del vehículo 7000 USD. A continuación se detallan algunas especificaciones importantes 3. Dimensiones El vehículo debe contar con un ancho de trocha mínimo de 1,2 m y máximo de 1,6 m. La distancia mínima entre ejes debe ser de 1,5 m (se entiende por ancho de trocha la distancia entre los centros de los neumáticos de las ruedas de un mismo eje). El vehículo no debe medir más de 5,0 m de largo y 2,0 m de ancho. Si el vehículo presenta una o más estructuras móviles, excluyendo las ruedas, estas no pueden exceder las dimensiones máximas. Barra antivuelco El vehículo debe incorporar barras estructurales antivuelco en su chasis, tal como se muestra en la Figura 2.3.. Los demás detalles en: http://carrerasolar.com/wp-content/uploads/2014/10/Bases_Tecnicas_LRS_V1.3.pdf 3. 18. 29.
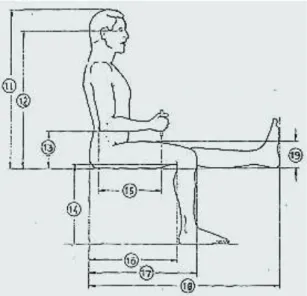
(32) Diseño y construcción de un vehículo solar híbrido.. Figura 2.3 Esquema de barra antivuelco Asiento El vehículo debe disponer de un asiento compuesto por al menos una base y un respaldo que permita al ocupante apoyar toda la espalda y que no lo sobrepase en altura en posición de conducción. La estructura del asiento debe ser solidaria a la rueda trasera. El ángulo de inclinación del asiento, respecto a la vertical, no debe exceder los 35° (Figura 2.4)4.. Figura 2.4 Esquema de requerimientos del asiento Visión El ocupante debe tener visión delantera clara. Debe poder ver un objeto situado en el suelo a 4 m del borde delantero del vehículo. El ocupante debe tener visión trasera clara sobre las áreas sombreadas de la figura 2.5. Una vez en posición de. El concepto de la determinación del ángulo de inclinación se basa en la medición del ángulo del torso, de acuerdo a las normas ISO/JIS. El ángulo β no debe superar los 35°. 4. 30. 19.
(33) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. conducción, la altura mínima de los ojos del ocupante debe ser de 0,7 m por encima de la carretera.. Figura 2.5 Visual requerida para el piloto Funcionamiento El vehículo debe ser capaz de ser impulsado hacia adelante por sus propios medios con el ocupante en posición de conducción. Esto incluye la partida del vehículo. El vehículo debe ser capaz de arrancar desde el reposo en una pendiente de 14% sin ser empujado. En Clasificatorias, el vehículo deberá completar, sin presentar fallas eléctricas ni mecánicas, un circuito de 1 km a una velocidad promedio de al menos 30 km/h. Este circuito estará dotado de baches cada 100 m que representen potenciales irregularidades del pavimento en carrera. Dirección El sistema de dirección debe permitir maniobrar el vehículo de manera segura en movimiento. El vehículo debe ser capaz de realizar una curva en “U” en ambas direcciones en una pista de 9 m de ancho. El vehículo debe ser capaz de maniobrar a través de la siguiente disposición de obstáculos representadas por conos (figura 2.6).. Figura 2.6 Esquema de maniobrabilidad de la dirección El sistema de dirección del vehículo debe considerar solamente componentes mecánicos para su funcionamiento. Ruedas y Neumáticos El vehículo debe poseer al menos tres ruedas de apoyo. El vehículo debe contar con suspensión en cada una de sus ruedas. Los neumáticos deben ser aptos para uso en carretera, capaces de soportar las cargas o fuerzas impuestas por la masa del vehículo (incluyendo al ocupante), su velocidad y frenado. Su utilización debe 20. 31.
(34) Diseño y construcción de un vehículo solar híbrido.. realizarse de acuerdo con las recomendaciones del fabricante. Los neumáticos a utilizar deberán tener una huella cuya profundidad sea de mínimo 1,5 mm. No se permite el uso de neumáticos lisos. Los neumáticos deben estar libres de cualquier defecto aparente. Frenos El vehículo debe contar con dos sistemas de frenos equilibrados e independientes entre sí (principal y secundario), de manera que si un sistema falla, el otro pueda ser accionado para detener el vehículo. En caso de usar frenos de fabricación para bicicletas para el sistema de frenado, el sistema principal debe ser de disco hidráulico con diámetro exterior mínimo de 200 mm. Para el sistema secundario, se permite tanto frenos de disco hidráulicos como mecánicos, ambos de diámetro exterior mínimo de 200 mm. Frenos de llanta y buje no están permitidos. Los vehículos deberán estar equipados con un freno de estacionamiento capaz de mantener estático al vehículo con su ocupante en una pendiente de 20%. Para esto, se debe poder emplear uno o ambos sistemas de frenado especificados en el primer punto como freno de estacionamiento de manera segura, o bien contar con un sistema de freno totalmente independiente del mencionado anteriormente para cumplir esta exigencia. En caso de usar frenos de fabricación para bicicletas para el freno de estacionamiento, se permiten de todo tipo. Frenos de disco, llanta y buje están permitidos. El trabajo mecánico de frenado de al menos uno de los sistemas de frenos especificados en el primer punto debe ser aplicado sobre al menos dos ruedas del vehículo. Está permitido el uso de frenos regenerativos. El vehículo debe ser capaz de detenerse en 5 m desde una velocidad inicial de 20 km/h. Fuente de Energía La irradiación solar recibida de forma natural sobre las celdas fotovoltaicas dispuestas en el vehículo, junto con la energía que proporciona el ocupante mediante pedaleo, son las únicas fuentes de energía externa que pueden ser utilizadas para propulsar el vehículo. No está permitido rescatar la energía calórica generada por la irradiación solar. Emplear el pedaleo del ocupante para cargar las baterías mediante un generador eléctrico está permitido. Para captar la irradiación solar, el vehículo puede contar con una superficie máxima de 4 m 2 de celdas fotovoltaicas de silicio. El arreglo de celdas solares debe estar instalado de tal manera que no afecte la estabilidad de vehículo. Por ejemplo, las corrientes de viento podrían desplazar al vehículo dado la disposición del panel. Se puede utilizar la energía recuperada por el movimiento del vehículo solar (freno regenerativo). Almacenamiento y Carga de Energía Se permitirá el uso de almacenamiento o acumulación de energía en el vehículo. El sistema de almacenamiento de energía del vehículo comprende al banco de baterías principal y al banco de baterías auxiliar. El banco de baterías principal es el que alimenta al sistema eléctrico de tracción del vehículo (i.e. electrónica de potencia y motor). La capacidad de energía nominal máxima permitida para el. 32. 21.
(35) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. banco de baterías principal es de 1,5 kWh. Las baterías que componen el banco de baterías principal deben estar sujetas firmemente a la estructura del vehículo de tal manera que se puedan desmontar de ella. El vehículo debe contar con interruptores que aíslen la conexión a paneles y baterías de forma independiente, además de un interruptor general de emergencia que desenergice todo el sistema. Luces e Indicadores El vehículo solar debe contar con las siguientes luces dispuestas de manera simétrica respecto de su centro longitudinal: 2 focos delanteros de color blanco o amarillo, 2 focos traseros fijos de color rojo. 2 focos de viraje delanteros y 2 focos traseros de color amarillo. El equipo debe mostrar que los focos de viraje del vehículo pueden ser empleados como luces intermitentes de advertencia. En caso contrario, el vehículo deberá estar provisto de 2 focos intermitentes de advertencia delanteros y traseros independientes de las luces de viraje que cumplan lo anterior. Similarmente, el equipo debe mostrar que las luces traseras fijas del vehículo pueden ser empleadas como luces de frenado. En caso contrario, el vehículo deberá estar provisto de 2 focos de frenado traseros independientes de las luces traseras fijas que cumplan lo anterior. Seguridad Los accionadores de los frenos, el acelerador y otros mandos electrónicos esenciales para la conducción del vehículo deben estar dispuestos en los mandos de dirección del mismo, de manera que el ocupante pueda manipularlos con sus manos de forma segura. Todos los piñones, cadenas y otros componentes mecánicos que presenten movimiento, deberán estar cubiertos durante su funcionamiento, de manera que las extremidades del ocupante no queden expuestas a ellos. Los componentes internos y compartimientos de carga deberán estar asegurados a la estructura. Se debe velar por una estrategia de diseño que presente un chasis y fuselaje que brinden espacio adecuado para el ocupante en el habitáculo mientras conduce y está detenido. Se deben asegurar todos los componentes del vehículo a su estructura, evitando que componentes sueltos puedan lesionar al ocupante en caso de colisión o volcamiento. Con las especificaciones expuestas se establece el árbol objetivo de la Figura 2.7.. 33 22.
(36) Diseño y construcción de un vehículo solar híbrido.. Figura 2.7 Árbol de Objetivos para diseño del vehículo 23. 34.
(37) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 2.2 Análisis de alternativas Un vehículo con características suficientes para suplir los requerimientos establecidos (según árbol de objetivos) está compuesto en términos generales por: Chasis, dirección, suspensión, sistema de tracción humana (transmisión por pedales), sistema de tracción eléctrica (motor), baterías y paneles fotovoltaicos. Los vehículos de tres ruedas reducen la fricción y eliminan una cantidad considerable de componentes que involucran el montaje de una rueda, como ejemplo la suspensión. De esta forma, si se logra controlar estabilidad y aprovechar el eje mono rueda para el uso de un motor embebido, el vehículo de 3 ruedas es una buena opción. Se analizarán algunas alternativas para diferentes factores: 2.2.1 Configuración Con relación a la ubicación y número de ruedas se analizarán 3 alternativas: Delta, TadPole y Tadpole recostada. Existen diferentes autores que han analizado comparativamente estas alternativas [12]. . Alternativa Delta: 2 ruedas atrás, una rueda adelante. Ventajas: El diseño delta posee un sistema de transmisión delantera, en el que los elementos de transmisión requieren menor longitud que los que se usarían en diseños que lleven la transmisión desde la parte delantera a la trasera, por ejemplo si se tratara de transmisión por cadena, esta no estaría holgada a lo largo del vehículo, hecho que podría romper la cadena, además de generar pérdidas de potencia.. Figura 2.8 Modelos Delta (derecha Kettweisel Delta) [12] 24. 35.
(38) Diseño y construcción de un vehículo solar híbrido.. El reducir las pérdidas de potencias en comparación con otras alternativas, así como requerir menos materia prima para transmisión son factores favorables que deben tenerse en cuenta. La silla se encuentra cerca de las ruedas traseras lo que hace que el centro de gravedad del vehículo baje en comparación con otros diseños en que los elementos de transmisión se encuentran por debajo del asiento y no se puede bajar más el centro de gravedad lo que podría generar inestabilidades. La alternativa ofrece fácil fabricación, debido a que la parte delantera se asemeja a la de una bicicleta corriente y los materiales necesarios para la construcción son de gran accesibilidad. Ofrece sin duda una gran estabilidad en terrenos planos. Desventajas: Es una alternativa que puede demandar un poco más inversión monetaria, ya que normalmente es necesario un diseño que implique mayor longitud del vehículo, la alternativa delta suele una ubicación del centro de gravedad relativamente alta, factor que si no se aminora, se traduce en problemas al momento de virar en una curva. Por el diseño de la alternativa con dos ruedas traseras es necesario implementar un sistema de dirección que nos permita dirigir de manera eficaz el vehículo. . Alternativa Tadpole: 2 ruedas adelante y una atrás. Ventajas: Permite alcanzar velocidades relativamente altas debido a su buena estabilidad. Se suele instalar frenos delanteros en las llantas delanteras, obteniendo un frenado preciso.. Figura 2.9 Modelos Tadpole5 5Varios. ejemplos en http://faircompanies.com/news/view/10-velomoviles-parasplazarsesin-motor-a-50-kmh/. 36. 25.
(39) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Desventajas: Distancia considerable entre pedales y llanta trasera, lo que se traduce en problemas para tensar la cadena y pérdidas de tracción. Algunos autores han comparado las configuraciones Delta y Tadpole [11]. Los Centros de gravedad C.G se ubican por lo general por detrás de la línea de inflexión del piloto para la configuración Delta y por delante para TadPole (Figura 2.10).. a). Delta. b) TadPole. Figura 2.10 Posición de C.G en configuraciones Delta y TadPole [11] Estas comparaciones [11] llevan a concluir que es preferible la configuración Tadpole. En un vehículo Delta con una ubicación del C.G hacia adelante proporciona un margen estrecho de inclinación. Además con el vehículo estacionado solo basta una pequeña inclinación para que este vuelque.. Figura 2.11 Estabilidad en una configuración Tadpole En comparación, la configuración Tadpole con un C.G apropiadamente centrado proporciona una excelente tracción, rotación y estabilidad en el frenado. Provee un mayor rango de inclinación, de tal forma que no obliga a obtener un ángulo de inclinación exactamente correcto y también se puede inclinar aún más en posición de estacionado sin volcarse. A continuación se mencionan algunas alternativas para los diferentes sistemas que configuran el vehículo: Chasis, Sistema de Dirección, Suspensión y transmisión. Las alternativas a analizar han sido tomadas de experiencias desarrolladas para diferentes competencias como el SAE Supermileage, World Solar Challenge y Carrera Solar de Atacama.. 26. 37.
(40) Diseño y construcción de un vehículo solar híbrido.. 2.2.2 Chasis Las alternativas que se presentan para el chasis son: Plataforma portante, Estructura tubular y Viga longitudinal portante. . Plataforma portante. Figura 2.12 Chasis con plataforma portante [6] Bastidor formado por una plataforma rígida que puede alojar todos los elementos mecánicos y podría circular sin carrocería [6]. Su forma estructural puede ser, tanto irregular (no rectangular), como regular (rectangular). Se compone de dos perfiles longitudinales, unidos entre sí por algunos laterales que se disponen perpendicularmente. Su diseño no es tan complejo, permitiendo que su proceso de fabricación sea fácil. No dispone de protección contra colisiones laterales y presenta poca capacidad de resistencia a la torsión. . Estructura tubular. Figura 2.13 Estructura tubular [6] Consiste en un armazón tubular completo, formado por tubos de acero o de aluminio de sección circular o cuadrada; normalmente van soldados entre ellos, aunque existe la posibilidad de optar por uniones atornilladas en ciertas partes del chasis, pero este tipo de unión es poco utilizada. Como ventajas obtenidas al fabricar un chasis de forma tubular es que se consigue una mayor rigidez a la torsión y una mayor resistencia a cualquier tipo de esfuerzo. Su principal inconveniente es la complejidad en el proceso de fabricación. Esto hace prácticamente inviable su producción en serie. En las diferentes competencias en las que intervienen vehículos de estas condiciones se han desarrollado diferentes tipos de chasis procurando siempre reducir peso y manteniendo resistencia adecuada. Para ello se emplean materiales como aluminio y materiales compuestos con las limitantes de costos y algunas propiedades como soldabilidad.. 38. 27.
(41) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. . Viga longitudinal portante. Figura 2.14 Viga longitudinal portante Este tipo de chasis se basa en una estructura independiente de la carrocería. Se compone de una columna vertebral y de unos travesaños dispuestos perpendicularmente, los cuales sirven para sujetar las ruedas delanteras y para ubicar el arco de seguridad que protege al piloto en caso de un volcamiento. Es un bastidor rígido y su diseño sencillo permite que su construcción sea fácil, pero, no proporciona protección contra colisiones laterales, por lo tanto, la estructura tiene que ser combinada con un cuerpo que compense esta deficiencia. Asimismo, tiene poca capacidad de resistencia a la torsión longitudinal. 2.2.3 Sistema de Dirección Generalmente un sistema de dirección simple (de tipo mecánico) está compuesto por una volante con su eje, caja de dirección (mecanismo que convierte movimiento de rotación a traslación), barras y palanca de dirección. Las alternativas que se presentan son Dirección por cremallera, Dirección tipo Go Kart y Dirección con mando lateral [6]. . Dirección con cremallera. 1 Barra de dirección; 2 rótula barra de dirección; 3 guardapolvos cremallera de dirección; 4 cremallera; 5 casquillo; 6 fijación guardapolvos; 7 taco elástico; 8 caja de dirección; 9 sinfín de la dirección.. Figura 2.15 Esquema de dirección de piñón cremallera [13] Este tipo de dirección se caracteriza por su mecanismo desmultiplicador (piñón – cremallera) y su sencillez de montaje. En el extremo del árbol hay montado un piñón que engrana con una cremallera. Al girar el volante, el piñón hace que se mueva la cremallera, hacia la izquierda o hacia la derecha. Los extremos de la 28. 39.
(42) Diseño y construcción de un vehículo solar híbrido.. cremallera están conectados por medio de barras a las palancas de acoplamiento de las articulaciones, no existiendo en este caso brazo de dirección ni biela [11]. Es un sistema sencillo, que no requiere un espacio grande para su instalación; como el vehículo es relativamente liviano no necesita ser ayudado por medio de un sistema hidráulico, neumático o eléctrico. La desventaja es que estos dispositivos pueden llegar a ser costosos. . Dirección tipo Go Kart. Figura 2.16 Dirección tipo Go Kart [6] Este mecanismo utiliza un sistema de barras o palancas dispuestas de tal forma que puedan transmitir el movimiento de giro del volante en un movimiento que orientará las ruedas como lo disponga el piloto. La rueda debe estar sujeta al chasis por medio de un eje que le permita tanto trasladar como girar con la dirección, logrando este último con una rótula a ambos extremos. La pieza que sujeta la rueda debe tener una palanca, que le permita girar al actuar sobre ella. En el extremo de esta palanca se pone una barra de dirección que tiene una rótula en cada una de sus terminaciones (las rótulas tienen la función de permitir el giro). Dicha barra de dirección va desde el extremo de la palanca al eje del volante. Este tipo de dirección es más sencilla, ya que esta no contiene sistemas como los mecanismos desmultiplicadores, los cuales ayudan a aplicar la fuerza necesaria para que el conductor no tenga que cargar con las restricciones de peso y fricción, dando una mejor precisión y suavidad al momento de girar el volante. Por lo tanto, en un sistema tipo Go Kart, el conductor deberá realizar más fuerza para hacer mover las ruedas. . Dirección con mando lateral. Figura 2.17 Esquema de dirección con mando lateral6 6Inglis,. 40. P.; Belliveau, J. y Flindall S. Universidad de Dalhousie.. 29.
(43) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Consiste en un mecanismo simple de cuatro barras. Consta de una barra transversal que actúa para hacer pivotar las ruedas de manera uniforme. Su principio de funcionamiento es similar al de la dirección tipo Go Kart, presentando como diferencia, que este sistema no dispone de un volante, sino que por medio de unas palancas a cada lado transmiten el movimiento que orientará las ruedas. Puesto que son pocas piezas, hace que su montaje sea simple, ayuda a reducir peso al vehículo y deja espacio suficiente para las piernas del conductor. 2.2.4 Transmisión de Potencia El vehículo que se proyecta es de tipo Híbrido. Esto implica el pensar en combinar de manera sincronizada dos fuentes de potencia: Motor eléctrico y propulsión humana (Figura 2.18).. Mecanismo de transmisión. Accionamientos. Rueda de tracción. Figura 2.18 Esquema de transmisión de potencia La potencia entregada desde la fuente a la rueda de tracción se realiza mediante un mecanismo de transmisión. La distancia que existe entre eje motriz y rueda de tracción obliga a prescindir de transmisión por piñones. Las alternativas que se plantean entonces son transmisión por correa y transmisión por cadena. . Transmisión por correas:. Figura 2.19 Transmisión por correa Entre las ventajas importantes de las transmisiones por correas se tiene que pueden transmitir potencia a distancias relativamente grandes y que las correas por su flexibilidad dada por su material son capaces de amortiguar los impactos que ocurren durante la marcha de la máquina conducida. Entre las desventajas se encuentra que la relación de transmisión no es constante, existiendo siempre un deslizamiento entre las correas y las poleas. Durante el trabajo se va disminuyendo la tensión inicial de la correa, bajando la capacidad de transmitir la potencia. Las 30. 41.
(44) Diseño y construcción de un vehículo solar híbrido.. correas pueden ser redondas, planas, trapezoidales en V y dentadas, estas últimas constituyen un sistema moderno de transmisión de potencia que reúne las ventajas de los otros tipos de correas y elimina sus inconvenientes. . Transmisión por cadena:. Figura 2.20 Ejemplo de transmisión por cadena [6] Cuando se necesita transmitir potencia con relación de transmisión constante y no es posible emplear engranajes porque la distancia entre centros es demasiado grande, existe la alternativa de una transmisión por cadena. El caso más simple de dicha transmisión consiste en una cadena motriz y dos piñones (sprockets), uno conductor y otro conducido. Las ventajas principales son: Transmiten potencia a distancias grandes, la relación de transmisión es prácticamente constante, generan menos cargas sobre los árboles y sus apoyos ya que las cadenas no requieren de una tensión inicial como las correas, las cadenas pueden trabajar bajo diferentes temperaturas. Con una sola cadena se puede transmitir rotación a varios árboles. Debido a estas ventajas, se utilizan con frecuencia en grúas, motocicletas, automóviles, bicicletas, motores de combustión interna, maquinaria agrícola, etc. Como desventajas, se encuentra cierta irregularidad durante su funcionamiento y necesidad de un montaje y mantenimiento minucioso. Motor embebido en la rueda Existen comercialmente motores que han sido adaptados concéntricamente con las ruedas de tracción en bicicletas, motos, sillas de ruedas, etc. Estas tienen la gran ventaja de evitar el uso de sistemas de transmisión debido a que la potencia la entregan directamente sobre la rueda traccionada, Figura 2.21.. Figura 2.21 Motor embebido en rueda. 42. 31.
(45) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. 2.2.5 Suspensión Como especificación exigida para este vehículo, se establece suspensión independiente en cada rueda. Esto garantiza que cumpla con condiciones mínimas de funcionalidad y seguridad cuando el vehículo opere bajo curvas, baches, frenadas, etc. En este tipo de suspensión se plantean como alternativas: Suspensión tipo McPershon, suspensión de doble horquilla, Suspensión Multilink [14]. Suspensión McPherson Fue creada por Earle S. McPherson de General Motors en 1947. Esta suspensión combina un amortiguador con un resorte en una misma unidad. Esto otorga una suspensión más compacta y ligera que puede ser usada para las ruedas frontales de los vehículos. La única excepción que confirma la regla en las suspensiones delanteras es el Smart de Mercedes Benz que en lugar de resortes utiliza ballestas o muelles por cuestión de espacio [14], Figura 2.22.. Figura 2.22 Suspensión McPherson Suspensión de Doble horquilla Otra suspensión independiente delantera es la llamada de doble horquilla. Mientras que hay diferentes configuraciones para esta, el diseño tradicionalmente usa dos brazos en forma de "A" para albergar la rueda –uno en la parte alta y otro en la parte baja-. Cada brazo, está montado en dos posiciones: una hacia el cuadro y el otro al neumático, en medio de ambos se alberga un resorte como un amortiguador. También se utiliza en el eje trasero y no se debe confundir con la famosa Multilink. La suspensión de doble horquilla permite un control mayor sobre el ángulo de la rueda, lo que traza el grado de inclinación hacia dentro o hacia afuera de la misma, manteniendo la llanta perpendicular con respecto al piso. Asimismo ayudan a minimizar el balanceo de la unidad por algún giro inesperado, ofreciendo así una dirección más estable, Figura 2.23.. Figura 2.23 Suspensión de doble horquilla 32. 43.
(46) Diseño y construcción de un vehículo solar híbrido.. Suspensión Multilink No se puede dejar de mencionar a la famosa suspensión Multilink, que es cualquiera que usa cuatro apoyos o más (las hay de cinco) en una configuración parecida a extender la palma de la mano en la pared, donde el dedo pulgar y el meñique ayudan a controlar los movimientos longitudinales de la llanta, mientras que los restantes manipulan las oscilaciones verticales de la misma. Los ejemplos también abundan con esta suspensión, la gran mayoría de los compactos como El Honda Civic, Ford Focus, Mazda3, Dodge Dart, Mitsubishi Lancer, y camionetas la Honda CR-V, Toyota RAV4, Ford Escape, Dodge Journey y Mitsubishi Outlander, solo por nombrar algunos aprovechan las ventajas de este tipo de suspensión, que es tan buena como una de doble horquilla, figura 2.24.. Figura 2.24 Suspensión Multilink Push rod and Pull rod Tal y como dicen sus nombres, la diferencia básica entre las dos es que en una la barra trabaja a tracción y la otra a compresión. Podríamos decir que a nivel de suspensión no hay diferencia entre uno u otro, dejando de lado los puntos de anclaje que evidentemente influirán mucho en la dinámica del monoplaza. Como se puede comprobar en las imágenes adjuntadas, la diferencia constructiva no es más que la disposición de la barra en diagonal [15], figura 2.25.. Figura 2.25 Suspensiones tipo Pullrod y pushrod [15]. 44 33.
(47) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Una barra trabajando a tracción (pull) puede ser más delgada que otra trabajando a compresión (push). Esto hace disminuir el peso de la masa no suspendida, cosa muy importante. Al ser la barra más delgada, presentará menos resistencia aerodinámica. Al mismo tiempo queda más espacio libre en la parte trasera del coche para que el aire fluya de mejor manera. En la configuración 'PullRod', los amortiguadores y muelles pueden situarse más abajo, reduciendo así la altura del centro de gravedad. Tener un centro de gravedad bajo influye favorablemente en la dinámica del vehículo. En 'PullRod', el sistema a tracción sufre esfuerzos más grandes en determinados puntos y por este motivo es más delicado. 2.2.6 Fuente eléctrica de potencia Como fuente eléctrica de potencia se utilizan los paneles fotovoltaicos, los cuales pueden ser ensamblados por diferentes tipos de celdas. No obstante la diferencia en costos puede ser el factor decisivo en la selección del tipo de panel. Aunque existen materiales en estudio con características fotovoltaicas, siguen siendo las celdas de silicio las más ampliamente usadas aún, por la mejor relación eficiencia/costo. A continuación se hace una síntesis de los tipos de celdas de silicio existentes [16]. Monocristalinas y policristalinas Las celdas fabricadas de bloques de silicio ('ingots') son las más comunes [16]. La experiencia comprobó una vida útil con frecuentemente más de 40 años sin ningún mantenimiento. Se distinguen entre placas compuestas de celdas monocristalinas (izquierda) y policristalina (derecha). En la práctica la diferencia entre ambas es mínima. La mayor eficiencia de las monocristalinas (~25%) puede tener importancia cuando el espacio disponible es reducido. Frecuentemente con placas policristalinas (~18%) se puede conseguir más energía por el mismo precio, figura 2.26.. Figura 2.26 Celdas Monocristalina y policristalina Capa fina o capa delgada Eficiencias cercanas del 10%. Para reducir los costos de producción y salir de la posible escasez de silicio se empezaron a investigar e invertir en placas de otros materiales. A parte de paneles solares de capa fina (thin film solar cells) con silicio (amorfas), se logró una importante reducción de los costos usando otros elementos. Los más importantes son módulos de capa delgada de cobre, indio y selenio (CIS) o de cobre, indio, galio y selenio (CIGS) y módulos de capa delgada. 34. 45.
(48) Diseño y construcción de un vehículo solar híbrido.. a base de cadmio y telurio (CdTe). Modernos procesos como por ejemplo tecnologías de imprenta resultan en capas ultra finas usando menos materia prima.. Figura 2.27 Celda de capa fina Celdas Flexibles Las nuevas formas de producción permiten también producir celdas flexibles que abren posibilidades que la rigidez de los paneles tradicionales no permitió. Estas celdas cada vez más se incorporan en la ropa, mochilas, sombrillas, etc. A parte de aplicaciones especiales, sirven para cargar aparatos de poco consumo. Así se puede evitar un celular descargado, alimentar otros aparatos portátiles o tener luz en la playa una vez que se va el sol.. Figura 2.28 Celda flexible Capas transparentes Un desarrollo práctico es la recién empezada producción de ventanas con capas finas semi-transparentes. Es una válida alternativa arquitectónica para incluirlas en edificios. Con estas se puede reemplazar los vidrios polarizados y usar la energía generada para apoyar la climatización de los edificios. Celdas orgánicas Celdas orgánicas ya se puede tejer en la ropa, por ejemplo para cargar aparatos de telecomunicación. De interés especial es la Celda Grätzel de material simple similar a la fotosíntesis con características muy prometedoras. Con esta invención el Prof. Grätzel ganó el Premio Tecnológico del Millenium en el 2010. Actualmente están preparando una primera producción industrial. A causa del uso de materiales simples, se espera en el futuro una importante reducción de los precios. Contrario de las celdas cristalinas, tienen la ventaja que la eficiencia aumenta con la temperatura. . 46. Celdas de concentración 35.
(49) Edgar Alonso Salazar Marín-Juan Felipe Arroyave Londoño-Ángel Ándres Vasquez Ospina. Concentrar la luz con sistemas ópticos es otro desarrollo para aumentar la relativamente baja eficiencia de las celdas fotovoltaicas y reducir los costos. Aunque se logró mejorar la eficiencia por un factor importante en los sistemas instalados, la necesidad de orientarlos exactamente hacia el sol y el control de la alta temperatura generada imponen sistemas sofisticados con un mantenimiento alto y costoso. Nuevas tecnologías que eviten las desventajas están bajo desarrollo. Las investigaciones continúan fuertemente. En 2013 por ejemplo se alcanzaron con el mineral Perovskite producir en el laboratorio celdas fotovoltaicas con una sorprendente eficiencia de 15% en el laboratorio. Este mineral, la primera vez descrito en 1839, no es tóxico, abundante y conocido como semiconductor desde años. Lo excitante es el rápido avance en lograr esta eficiencia en menos de cuatro años (de solamente 3% en 2009), mientras otras tecnologías necesitaban décadas para lograr algo similar. Este salto nutre la esperanza de producir dentro de pocos años nuevas celdas de Perovskite hasta un 30% de eficiencia a costos muy bajos [16]. Existe una alternativa que puede reducir costos y peso. Los paneles fotovoltaicos comerciales tienen el propio ensamble de celdas con una estructura en aluminio que, aunque incrementa el peso, garantiza protección y confiabilidad en la potencia entregada. No obstante, la consecución de celdas para realizar un ensamble propio es una alternativa bastante interesante, ya que minimiza costos y peso, permitiendo realizar la configuración que se requiera en función del voltaje requerido. La desventaja es el cuidado excesivo que tiene la manipulación de estas celdas por su reducido espesor y sensibilidad a las temperaturas de soldadura. Además del alto riesgo a daños, al no contar con una estructura que las proteja. 2.2.7 Almacenamiento Existen diversos tipos de baterías en función de la aplicación, las cuales pueden variar notoriamente de costo. En sistemas fotovoltaicos los más empleados son: Plomo ácido, Gel y en aplicaciones especiales níquel cadmio y ion de litio. Plomo ácido de electrolito líquido Las baterías de plomo - ácido se aplican ampliamente en los sistemas de generación fotovoltaica. Dentro de la categoría plomo - ácido, las de plomo antimonio, plomo - selenio y plomo - calcio son las más comunes. La unidad de construcción básica de una batería es la celda de 2 Volts. Dentro de la celda, la tensión real de la batería depende de su estado de carga, si está cargando, descargando o en circuito abierto. Dentro de las baterías de plomo - ácido, las denominadas estacionarias de bajo contenido de antimonio son una buena opción en sistemas fotovoltaicos. Ellas poseen unos 2500 ciclos de vida cuando la profundidad de descarga es de un 20 % (es decir que la batería estará con un 80 % de su carga) y unos 1200 ciclos cuando la profundidad de descarga es del 50 % (batería con 50 % de su carga). Las baterías estacionarias poseen además, una baja auto-descarga (3 % mensual aproximadamente contra un 20 % de una batería de plomo - ácido convencional) y un reducido mantenimiento (Densidad de Energía: 30-40 Wh/kg). 36. 47.
Figure
![Figura 2.2 Estructura de diseño según Pahl&Beitz [10][11]](https://thumb-us.123doks.com/thumbv2/123dok_es/2695662.538115/30.701.102.590.115.882/figura-estructura-de-diseño-según-pahl-amp-beitz.webp)
+7
Documento similar
El proyecto está centrado en el desarrollo de un prototipo de VANT controlado a través de una aplicación de Smartphone para el sistema operativo Android.. Se empleará una placa
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Este proceso analiza el fonocardiograma adquirido arrojando tres envolventes, la amplitud, energía y frecuencia instantánea, esta información derivada del
Entonces este proyecto se propone describir y materializar el diseño y la construcción de una mesa de mezcla que además de utilizar productos adquiridos en Colombia y
• Vehículo híbrido, es el vehículo que combina el uso de un motor térmico (gasolina/diésel) con un motor eléctrico. Esta combinación hace que el vehículo reduzca
Las actividades que más condicionan la duración de los trabajos van a ser la formación de los Diques por estar sometidos en cierta manera a las inclemencias meteorológicas, puesto
Las dimensiones del puesto de trabajo deberán calcularse de tal manera que los trabajadores dispongan de la suficiente libertad de movimientos para sus actividades, teniendo en
Ésta como es lógico depende de varios factores entre los que está el viento, sin embargo en las embarcaciones con quilla abatible se puede modificar la escora
