Control predictivo basado en modelo para estructura robótica paralela de dos grados de libertad
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA “Control predictivo basado en modelo para estructura robótica paralela de dos grados de libertad”. Autor: Alejandro Ojeda Paz Email: [email protected] Tutores: Msc. Orlando Urquijo Pascual Dr. Boris L. Martínez Jiménez Email: [email protected] Email: [email protected]. Santa Clara 2015 "Año 57 de la Revolución".
(3) i. PENSAMIENTO. ―Aquel que se basa en. el conocimiento de lo pasado, gobierna la existencia. presente y es capaz de comprender los orígenes de todo. Este es el eterno comienzo del principio”. CHUANG-TSE.
(4) ii. DEDICATORIA. A mis padres, mi abuela y mi tío por su dedicación A ella, Arianet, por su tiempo y ayuda Y a todos aquellos que me brindaron una mano.
(5) iii. AGRADECIMIENTOS. A mi padre y mi tío que me apoyaron con las necesidades A mi mamá y mi abuela por su insistencia y preocupación A Arianet por brindarme su ayuda y compañía en el desarrollo de este trabajo A mis tutores Urquijo y Boris por su tiempo A Valeriano por sus revisiones detalladas A mis amigos Lanza, Jorgito, Gustavo y Feitó por su apoyo Y a mis compañeros de universidad con los que compartí momentos inolvidables..
(6) iv. RESUMEN. Las ventajas que presentan los robots paralelos en el manejo de grandes pesos, su exactitud en el posicionamiento del efector final y la rigidez de su arquitectura, los hacen una alternativa a tener en cuenta con respecto a las estructuras robóticas en serie. En la medida que ha venido aumentando el uso de los robots paralelos, lo ha hecho también el interés por el estudio de estrategias de control que faciliten su correcta explotación. Una estrategia promisoria es el Control Predictivo debido a su desempeño en términos de rapidez, control anticipativo, rechazo de perturbaciones o errores de modelado, la incorporación de restricciones y la optimización de parámetros. El posicionamiento continuo de las cargas, con actuadores electro-neumáticos, ha resultado ser un problema de control complejo. En este trabajo se determina el modelo de posición contra mando usando técnicas de identificación experimental que describe el posicionamiento de los actuadores neumáticos del simulador y se determina empíricamente el controlador predictivo basado en el modelo. Luego, se compara el desempeño del controlador predictivo con el del proporcional integral (PI) con filtro implementado anteriormente en la planta mediante simulación, dado que el controlador anterior poseía un mando muy oscilatorio que afecta las válvulas electro-neumáticas..
(7) v. TABLA DE CONTENIDOS PENSAMIENTO ....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ....................................................................................................... iii RESUMEN ...........................................................................................................................iv TABLA DE CONTENIDOS ................................................................................................. v INTRODUCCIÓN ................................................................................................................. 1 Organización del informe ................................................................................................ 3 CAPÍTULO 1.. MODELADO Y CONTROL DE ROBOTS PARALELOS .................. 4. 1.1 Robótica paralela ....................................................................................................... 4 1.1.1. Tipología de robots paralelos ....................................................................... 5. 1.1.2. Ventajas de los robots paralelos.................................................................. 7. 1.2. Actuadores neumáticos ........................................................................................ 8. 1.2.1. Ventajas de su utilización ............................................................................. 8. 1.2.2. Modelado de actuadores neumáticos ......................................................... 9. 1.2.3. Modelado de las válvulas de flujo.............................................................. 11. 1.3. Modelado por identificación experimental ....................................................... 12. 1.3.1. Identificación experimental en actuadores neumáticos ......................... 12. 1.3.1.1. Determinación práctica de los parámetros del modelo ...................... 13. 1.3.1.2. Determinación de los parámetros del modelo por identificación. experimental................................................................................................................ 13 1.4. Control Predictivo Basado en Modelos ............................................................ 15. 1.5. Estrategias de control ......................................................................................... 16. 1.6 Consideraciones finales del capítulo .................................................................... 20.
(8) vi CAPÍTULO 2.. SÍNTESIS DEL CONTROLADOR PREDICTIVO PARA EL. ROBOT PARALELO DE 2GDL ........................................................................................ 22 2.1. Descripción de la plataforma de dos grados de libertad ............................... 22. 2.2. Obtención del modelo electro-neumático a través de la identificación. experimental.................................................................................................................... 24 2.3. Estrategia del MPC ............................................................................................. 26. 2.3.1 Elementos del control predictivo .................................................................... 29 2.3.2 Sintonía del control predictivo ........................................................................ 30 2.4 Obtención del controlador MPC ............................................................................ 31 2.5 Consideraciones finales del capítulo .................................................................... 35 CAPÍTULO 3.. CONTROL DEL ROBOT. SIMULACIÓN .......................................... 36. 3.1. Control PI con filtro .............................................................................................. 36. 3.2. Control Predictivo Basado en Modelo .............................................................. 37. 3.3. Simulaciones ........................................................................................................ 37. 3.4 Análisis económico.................................................................................................. 48 3.5 Consideraciones finales del capítulo .................................................................... 49 CONCLUSIONES Y RECOMENDACIONES ................................................................ 50 Conclusiones .................................................................................................................. 50 Recomendaciones ......................................................................................................... 51 REFERENCIAS BIBLIOGRÁFICAS................................................................................ 52 ANEXOS .............................................................................................................................. 57 Anexo I. MPCTool ........................................................................................................ 57.
(9) INTRODUCCIÓN. 1. INTRODUCCIÓN. Las aplicaciones de los robots de estructura paralela se han incrementado notablemente en los últimos años y aparejado a ello han aumentado los estudios relacionados con los esquemas de control más apropiados para gobernar tales sistemas, posible gracias al aumento de la capacidad de cómputo de los nuevos procesadores. Dadas sus ventajas como velocidad de operación, pequeños errores de posicionamiento, y excelente relación peso-carga a manipular, estos robots han hecho presente su hegemonía en aplicaciones industriales como máquinas herramientas, centros de ensamblaje, en la industria de componentes electrónicos en la fabricación de circuitos integrados y placas electrónicas debido a la precisión que requiere realizar el montaje y la soldadura de estos componentes (Urquijo, 2014). En. aplicaciones médicas para operaciones en el campo de la oftalmología,. neurocirugía y rehabilitación en ortopedia (en la rehabilitación de tobillo) es también aprovechada la movilidad y exactitud de posicionamiento del elemento terminal. En simuladores de conducción y de vuelo tanto para fines recreativos como para entrenamiento del personal, ahorrando recursos. También son empleados en sistemas de posicionamiento de antenas parabólicas, robots trepadores utilizados en tareas de mantenimiento, robots paralelos submarinos y sistemas paralelos para teleoperación, entre otros (Urquijo, 2014). En este trabajo se presenta una estructura de dos grados de libertad utilizada como simulador de tanque en el adiestramiento de personal de las instalaciones académicas de las FAR (Fuerzas Armadas Revolucionarias). En décadas pasadas, el control predictivo (MPC Model Predictive Control) se.
(10) INTRODUCCIÓN. 2. posicionó como una estrategia efectiva para un gran número de procesos (Allgöwer et al., 1999),(Camacho and Bordons, 1995). Muchos trabajos han mostrado que el control predictivo es una opción interesante para el manejo de diversos. procesos,. al. realizarse. una. optimización. del. pronóstico. del. comportamiento del sistema (Clarke et al., 1987), (Boucher et al., 1991), (Rossiter, 2002). Este control provee buenas respuestas en términos de rapidez, rechazo de perturbaciones y respuesta frente a errores en los parámetros de la planta. Sin embargo, aunque un significativo número de aplicaciones industriales pueden ser encontradas en procesos químicos o de fabricación de alimentos, donde las dinámicas a tratar son relativamente lentas, pocos resultados pueden encontrarse en el control de procesos con cinemática compleja, singularidades particulares y con alta dinámica, como es el caso de los robots paralelos (Vivas and Poignet, 2005), donde, además, se manejan órdenes de pocos milisegundos. Rubio y colaboradores (Rubio et al., 2007), en su trabajo realizado con anterioridad en la plataforma de dos grados de libertad diseñaron un controlador PI con filtro, que lo vuelve más sensible a las altas frecuencias. El filtro añadido al PI amplifica las altas frecuencias y deteriora la válvula electro-neumática debido a las oscilaciones del mando, lo cual resulta un problema sin resolver. De esta forma se plantea la siguiente hipótesis: el diseño de un control predictivo basado en modelo para controlar la posición de los pistones neumáticos de la plataforma de dos grados de libertad mejora el problema de las altas frecuencias presente en el controlador anterior (PI con filtro). Por todo lo planteado anteriormente el objetivo general es implementar un control predictivo basado en modelo de una estructura robótica de dos grados de libertad (2GDL) para disminuir las oscilaciones en el mando. Para lograr cumplir el objetivo anterior se plantean los siguientes objetivos específicos: 1. Analizar tendencias mundiales en cuanto a modelado de sistemas electroneumáticos..
(11) INTRODUCCIÓN. 3. 2. Analizar tendencias mundiales en cuanto a estrategias de control predictivo desarrolladas en robots paralelos y sistemas electro-neumáticos. 3. Obtener el modelo del sistema electro-neumático de la plataforma de 2 GDL a través de identificación experimental. 4. Describir la obtención del controlador predictivo basado en modelo a través de las ecuaciones y procedimientos que caracterizan a este método de control. 5. Obtener el controlador predictivo. 6. Evaluar y comparar el desempeño del sistema a través de simulación. Organización del informe El informe está conformado por la introducción, el desarrollo organizado en tres capítulos, seguido de las conclusiones, recomendaciones y las referencias bibliográficas. Capítulo 1: En el primer capítulo se realiza el análisis de la literatura consultada para la elaboración de este trabajo. Se hace referencia a la robótica paralela, los tipos de robots paralelos y sus ventajas, también a los actuadores neumáticos y las ventajas de su utilización. Se mencionan algunas de las diferentes variantes de solución de la problemática de control en sistemas electro-neumáticos y se plantea un estudio comparativo de algunas estrategias que se usan en la actualidad. Capítulo 2: En el segundo capítulo se realiza una breve descripción de la plataforma de dos grados de libertad. Mediante la identificación experimental se reobtiene el modelo de la plataforma, dado que por la falta de utilización en largo tiempo puede tener variaciones en sus coeficientes de fricción. Se explica el funcionamiento del control predictivo y se muestra su diagrama de bloques. Capítulo 3: Este capítulo se dedicará a expresar los resultados mediante simulación de la efectividad del método empleado y comparar los resultados con los del método anterior (PI con filtro)..
(12) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 4. CAPÍTULO 1. MODELADO Y CONTROL DE ROBOTS PARALELOS. En este capítulo se retoman algunos conceptos de robótica paralela y actuadores neumáticos, se habla de las técnicas de identificación analítica y experimental para aplicar posteriormente la identificación experimental. Se analizan tendencias mundiales en cuanto a modelado de sistemas electro-neumáticos y en cuanto a estrategias de control predictivo desarrolladas en robots paralelos y sistemas electro-neumáticos. 1.1 Robótica paralela En el contexto actual la noción de robótica implica una cierta idea preconcebida de estructura mecánica universal capaz de adaptarse, como el hombre, a muy diversos tipos de acciones y en la que concurren, en mayor o menor grado según los casos, las características de movilidad, gobernabilidad, autonomía y polivalencia. La robótica en sentido general abarca una amplia gama de dispositivos con diversos trazos físicos y funcionales asociados a su estructura mecánica particular, a sus características operativas y al campo de aplicación para el que se han concebido. Actualmente, en diversas ramas de la industria, se encuentra muy extendido el uso de los robots serie, pero hay que tener en cuenta el auge con el que se está presentando el campo de la robótica paralela dadas las posibles aplicaciones que brinda debido a sus ventajas: elevada velocidad de operación, alta rigidez y precisión, y manipulación de cargas superiores a su propio peso..
(13) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 5. Barrientos y colaboradores (Barrientos et al., 2007) denominan grado de libertad (GDL) a cada uno de los movimientos que puede realizar cada articulación con respecto a la anterior. El número de grados de libertad del robot viene dado por la suma de los grados de libertad de las articulaciones que lo componen. Las cadenas cinemáticas simples son aquellas en las cuales cada miembro posee un grado de conexión (para cada elemento de enlace de un manipulador, el grado de conexión es el número de cuerpos rígidos conectados a dicho elemento de enlace a través de una articulación) que es menor o igual que dos; mientras que las cadenas cinemáticas cerradas se obtienen cuando cualquiera de los elementos de enlace, excepto la base, posee un grado de conexión mayor o igual que tres (Merlet, 2006). Merlet (2006) define un manipulador paralelo genérico como un mecanismo de cadena cinemática cerrada en el que su efector final está unido a la base por varias cadenas cinemáticas independientes, y si un manipulador genérico posee un mínimo de dos cadenas cinemáticas que permiten una adecuada distribución de la carga, el número de actuadores es mínimo, el número de sensores necesarios para el control del mecanismo en lazo cerrado es también mínimo y cuando los actuadores están bloqueados el manipulador permanece en la posición anterior al bloqueo. Merlet lo denomina robot paralelo y lo define como aquel manipulador que está constituido por un efector final con n grados de libertad y una base fija, unidos por al menos dos cadenas cinemáticas independientes, en el que el movimiento se produce a través de n actuadores independientes. 1.1.1 Tipología de robots paralelos Es extremadamente difícil realizar una clasificación sistemática de las estructuras posibles en robótica paralela, dada la gran cantidad de términos que intervienen (número y tipo de cadenas cinemáticas, restricciones, etc.). Sin embargo, Merlet, según los movimientos que pueden hacer, los clasifica en dos grupos: los robots planares (actúan sobre un plano de dos dimensiones, Figura 1.1) y los espaciales (actúan sobre un volumen de tres, Figura 1.2) (Merlet, 2006)..
(14) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 6. Los robots planares poseen un efector final con dos o tres grados de libertad (dos traslaciones en el plano y una rotación, en caso de tener tres grados de libertad, sobre un eje perpendicular a dicho plano). En los robots planares de tres grados de libertad, tres cadenas soportan el efector final; las cadenas se conectan al efector final en tres puntos: generalmente el efector final es un triángulo (Merlet, 2006).. Figura 1.1. Robots paralelos planares de 3 grados de libertad.. Figura 1.2. Robot paralelo espacial de 4 grados de libertad..
(15) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 7. Los robots espaciales son aquellos que permiten movimiento en todo el espacio tridimensional y no en un plano, es decir, se pueden trasladar (posición en el espacio) y girar (orientación en el espacio) en los tres ejes de coordenadas; esto le confiere 3, 4, 5 y 6 grados de libertad, aunque existen algunos casos particulares que sólo poseen dos grados de libertad (Bonev, 2002). También se pueden clasificar de acuerdo a sus características estructurales como: simétricos y asimétricos. 1.1.2 Ventajas de los robots paralelos Los robots paralelos son utilizados principalmente en aquellas aplicaciones donde sus características los hacen ideales para resolver aquellos problemas que se presentan con los robots serie. Sus características principales desde el punto de vista de las ventajas que aportan se mencionan a continuación (Aracil et al., 2006): • La relación potencia-carga es alta ya que los accionamientos de potencia conectan directamente la base del robot al efector final, sirviendo de elementos estructurales que actúan de manera simultánea, permitiéndoles manipular cargas superiores a su propio peso. • Presentan una alta rigidez, lo cual se traduce en mayores precisiones respecto a un robot tipo serie. • Su arquitectura les permite alcanzar altas velocidades y aceleraciones, lo cual les permite realizar tareas industriales de manera más eficiente. Igualmente este tipo de robots poseen ciertas desventajas las cuales se listan a continuación: • La cinemática, la definición de las posiciones singulares y la construcción del modelo dinámico son más complicados que para el caso serie. La mayoría de las veces esto se resuelve de manera particular para cada configuración de robot, ya que no existen ecuaciones generales aplicables a todos ellos..
(16) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 8. 1.2 Actuadores neumáticos El actuador neumático es un dispositivo que convierte la energía en forma de aire comprimido en movimiento. Últimamente, actuadores neumáticos han sido utilizados en gran medida en numerosas aplicaciones de control en las industrias. Esto es principalmente porque estos actuadores tienen ventajas por su alta relación potencia-peso, relativamente bajo costo, fácil de mantener, más ligeros, y tienen una estructura simple en comparación con otros actuadores que están disponibles en el mercado (Gentile et al., 2002). A pesar de todas las ventajas en comparación con los actuadores eléctricos utilizados en los robots y máquinas, es difícil de controlar, lo que es debido al factor no lineal involucrado. 1.2.1 Ventajas de su utilización Los actuadores neumáticos tienen un amplio uso a nivel industrial por ser una tecnología limpia, de bajo costo, respuesta rápida, elevada relación potencia–peso y fácil mantenimiento. Intentando aprovechar las ventajas de esta tecnología, los actuadores electro-neumáticos se han venido introduciendo en aplicaciones donde se requiere el posicionamiento continuo de la carga, como por ejemplo: los robots paralelos, los simuladores de conducción y los simuladores de vuelo, entre otras reportadas en la literatura (Aracil et al., 2003),(Chen and McInroy, 2004),(Tadano and Kawashima, 2007). A pesar de estas ventajas, los actuadores neumáticos presentan características que hacen más complejo el control de su posición en aplicaciones donde se requiera el posicionamiento de la carga en cualquier parte de la carrera posible del cilindro. Esto se debe a la dinámica altamente no lineal que presentan por la compresibilidad del aire, el comportamiento no lineal del flujo de aire a través de las válvulas y la existencia de fuerzas de fricción estáticas y dinámicas entre el cilindro y el pistón, fuentes de serias perturbaciones al sistema, que incorporadas a la incertidumbre en los parámetros del sistema hacen que el diseño de los controladores sea complejo (Song et al., 2006a)..
(17) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 9. 1.2.2 Modelado de actuadores neumáticos En 1956 fue publicado por Shearer (Shearer, 1956) el primer trabajo reconocido en el campo del modelado de actuadores neumáticos. En este artículo Shearer desarrolla, por linealización aproximada, el modelo dinámico lineal de un actuador neumático de doble vástago para pequeños movimientos alrededor del centro del cilindro, y además, presenta un modelo teórico para el flujo másico de aire a través de una válvula proporcional y lo verifica experimentalmente. Las ideas expuestas en este artículo fueron adoptadas después por otros autores para el desarrollo de modelos más complejos. En 1972 Burrows en su libro (Burrows, 1972), basándose en las ideas de Shearer, expone en detalles la obtención del modelo dinámico lineal para un actuador electro-neumático, teniendo en cuenta consideraciones: el gas es ideal y los cambios de estado son adiabáticos, los cambios de temperatura en las cámaras del cilindro son despreciables, sólo existe fricción viscosa y es constante, el punto de operación es el centro del cilindro, y el flujo másico a través de la válvula se considera en función de la posición del carrete de la válvula y la presión en el cilindro. Como resultado se obtiene el modelo dinámico de la posición de la carga en función de la acción de control, que resulta de tercer orden tipo uno y sin ceros. Las no linealidades presentes en los actuadores electro-neumáticos son muy fuertes, por tanto deben considerarse y contemplarse en modelos no lineales. Richer y Hurmuzlu (Richer and Hurmuzlu, 2000a) desarrollan un modelo no lineal muy completo, donde, además de tener en cuenta la dinámica del flujo de aire, la dinámica de las presiones en el cilindro y la dinámica del movimiento de la carga, también se consideran las fugas de aire entre las cámaras, la dinámica de la válvula y la geometría de su orificio, la dinámica y el retardo de tiempo que introducen las tuberías, entre otros. Richer y Hurmuzlu determinan los parámetros de su modelo, el cual valida prácticamente por una serie de experimentos que explica en su artículo (Richer and Hurmuzlu, 2000b). Para la síntesis de muchas estrategias de control se requiere del modelo linealizado de la planta. W. Rugh (Rugh, 1984) propone un método de linealización.
(18) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 10. extendida, que permite obtener el modelo lineal para un punto de operación genérico, con coeficientes determinados por la posición del émbolo del cilindro. Siguiendo este camino, Belgharbi y colaboradores (Belgharbi et al., 1999) exponen un modelo analítico para el flujo a través de una válvula proporcional y proponen una aproximación polinomial del mismo. Luego Brun y colaboradores (Brun et al., 1999) exponen el modelo no lineal de un actuador electroneumático con el flujo de aire según el modelo de Belgharbi, lo linealizan y obtienen un modelo lineal en espacio de estado de cuarto orden, que es reducido a uno de tercer orden, promediando las constantes de tiempo asociadas a la variación de los volúmenes en cada cámara del cilindro. Janiszowski (Janiszowski, 2004) presenta la linealización del modelo teniendo en cuenta el retardo introducido por las tuberías cuando son considerablemente largas, obteniendo para la velocidad un modelo de segundo orden con retardo de tiempo, donde los coeficientes dependen de la posición del émbolo en el cilindro. Por otra parte, en el trabajo de Karpenko y Sepehri (Karpenko and Sepehri, 2006) puede verse la linealización del modelo sin promediar ninguno de sus parámetros y obtienen como resultado un modelo de quinto orden con un cero. En el trabajo de Rubio y colaboradores (Rubio et al., 2007) se desarrolla el modelo lineal del sistema considerando que el punto de operación del cilindro puede estar en cualquier posición, por lo que se aplica la linealización extendida (Sira-Ramírez et al., 2005). Trabajando con las funciones que caracterizan el flujo de aire por la válvula, las presiones en las cámaras del cilindro y el movimiento de la carga, se obtiene un modelo lineal de cuarto orden, tipo uno, con un cero similar al de Karpenko. Este nuevo modelo, a diferencia del resto de los analizados, tiene en cuenta el subdimensionamiento de la válvula y la diferencia entre las constantes de tiempo asociadas a las cámaras del cilindro. Luego, el modelo es reducido a uno de tercer orden, tipo uno, sin ceros, obteniéndose así un modelo similar al reducido de Brun. El nuevo modelo describe con mayor precisión la dinámica del sistema. Las peculiaridades de la dinámica, reflejadas en el nuevo.
(19) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 11. modelo, permiten establecer criterios de sintonía para el controlador propuesto, que garantizan su buen desempeño a pesar de las no linealidades del sistema. 1.2.3 Modelado de las válvulas de flujo Las válvulas neumáticas comerciales de carrete no son construidas perfectamente ajustadas, dado que el aire no es un buen lubricante y la sensibilidad a la suciedad sería muy grande. Es por ello que, alrededor de la posición central del carrete, se tendrán fugas de aire hacia ambas cámaras del cilindro, y de estas hacia el exterior. En estas condiciones, las válvulas se consideran subdimensionadas (underlapped valves) (Burrows, 1972). En el trabajo de Ning y Bone (Ning and Bone, 2002) se analiza la fugas de aire como una de las causas del error en estado estable en el desempeño del sistema de control que propone. En general, el modelo de las válvulas electro-neumáticas se divide en dos partes: una primera, correspondiente a la dinámica del posicionamiento de su carrete, que depende fundamentalmente del sistema electromecánico que emplee; y una segunda, que corresponde al modelo de la característica estática del flujo de aire a través del orificio. Dicho flujo de aire depende de la temperatura del aire, el área efectiva del orificio y las presiones antes y después del mismo. La dinámica de las válvulas empleadas en la actualidad es mucho más rápida que la dinámica de las cargas que se mueven con ellas, de ahí que muchos autores la desprecien (Brun et al., 1999), (Janiszowski, 2004). Por ejemplo, la válvula que emplea Brun tiene un ancho de banda de 170 Hz, mientras el actuador sólo responde a 2,4 Hz. Rubio y colaboradores en su trabajo (Rubio et al., 2007) consideran los efectos del subdimensionamiento de la válvula y demuestran la importancia de este criterio a partir de la comparación del modelo analítico con el modelo experimental. Sin embargo, desprecian la dinámica de la válvula, pues son empleadas válvulas MPYE de FESTO que tienen un ancho de banda de 100 Hz. Finalmente, al igual que hacen Kawashima y Janiszowski en sus trabajos, como función para la característica estática del flujo de aire a través de la válvula, se.
(20) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 12. toma la aproximación que se hace en la norma internacional ISO-6358 por ser un modelo mucho más sencillo, que describe perfectamente el fenómeno que se quiere. 1.3 Modelado por identificación experimental El término "Identificación de Procesos" adoptado en la década de los 60 en el ámbito de los especialistas de control automático, puede ser definido como la obtención de la estructura y los parámetros de un modelo matemático que reproduce con suficiente exactitud la planta real, para los fines deseados de control automático. Se han utilizado distintos enfoques o métodos para este propósito, siendo los principales: Identificación Analítica, Identificación Experimental utilizando señales especiales de prueba e Identificación Recursiva. La Identificación Experimental mediante Señales Especiales resulta generalmente el método más directo y el que puede producir resultados a más corto plazo. Las señales utilizadas con más frecuencia son los escalones y las llamadas secuencias binarias seudo-aleatorias. La restricción más importante de esta solución es la necesidad de introducir perturbaciones indeseables en el proceso que a menudo tropiezan con la resistencia de los operadores. En condiciones ideales, el experimento de identificación debe hacerse contando con una computadora conectada en línea con el proceso. La señal aleatoria o seudo-aleatoria que se utiliza para la identificación, puede superponerse sobre los valores normales de operación de la variable de entrada, sin que esto afecte sensiblemente al proceso de identificación (Aguado, 2000). 1.3.1 Identificación experimental en actuadores neumáticos Debido a que el método analítico para determinar los parámetros de los modelos son complejos, algunos autores optan por métodos prácticos o por métodos de identificación experimental para determinarlos. A continuación se comentan algunos trabajos..
(21) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 1.3.1.1. 13. Determinación práctica de los parámetros del modelo. La determinación práctica de algunos de los parámetros que conforman los modelos matemáticos desarrollados para los actuadores electro-neumáticos, no es muy sencilla. Especialmente complicados son los relacionados con las fricciones y el flujo a través de la válvula, más aún si se considera que las válvulas son realmente subdimensionadas. No obstante, hay trabajos que proponen algunos métodos para su determinación experimental. Por ejemplo, Kawashima y colaboradores (Kawashima et al., 2003) proponen un método práctico para la determinación de la característica estática y dinámica del flujo a través de una válvula. El método consiste en medir la presión de descarga en una cámara isotérmica sometiendo la válvula a una señal sinusoidal. A partir de la derivada, la señal de presión y la temperatura, se determina el flujo de aire y el área efectiva de la válvula y, así, su característica estática y dinámica con un error de un 5 %. También Kawashima y colaboradores (Kawashima et al., 2004) proponen un método práctico para la determinación de la conductancia sónica y la razón de presión crítica. El método consiste en medir la presión de carga y descarga de la válvula a una cámara isotérmica, y determinar los coeficientes de las funciones teóricas para flujo sónico y subsónico por el método de ajuste de mínimos cuadrados no lineal de Gauss-Newton. El error que se obtiene por el método propuesto es del 3 % para la carga y del 1,2 % para la descarga, que son valores tolerados en aplicaciones prácticas. 1.3.1.2. Determinación de los parámetros del modelo por identificación. experimental El uso de técnicas de identificación experimental se ha ido extendiendo para la obtención de los parámetros de los modelos para la síntesis de controladores. Entre los que utilizan estas técnicas están Varseveld y Bone (Varseveld and Bone, 1997), que identifican el sistema en lazo abierto con una señal PRBS “Pseudo Random Binary Signal” de diferentes amplitudes y obtienen los modelos para las posiciones centro y extremos del cilindro, corroborando la variación de la razón de.
(22) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 14. amortiguamiento del sistema en función de la posición. Para el diseño de la estrategia de control se queda con el modelo de la posición central. Schulte y Hahn (Schulte and Hahn, 2001), teniendo en cuenta que la dinámica del sistema es claramente dependiente de la posición de la carga y que el sistema es de tipo uno, identifican el sistema en lazo cerrado con una señal sinusoidal de frecuencia variable centrada en cinco posiciones diferentes. Los modelos obtenidos para cada posición y frecuencia se combinan en una única estructura mediante un modelo borroso (fuzzy). Zorlu y colaboradores (Zorlu et al., 2003), dado que los actuadores electroneumáticos presentan modelos ciertamente complejos, los tratan como sistemas multivariables. Ellos identifican el sistema en lazo abierto con una señal PRBS midiendo, además de la posición de la carga, las presiones en las cámaras del cilindro. Dividen el modelo en una parte mecánica (para el movimiento del pistón) y dos neumáticas (dinámica de las presiones dentro de la cámara), y determinan sus modelos de forma individual resultando una estructura multivariable que combina tres modelos lineales. Song y colaboradores (Song et al., 2006b), aplicando técnicas inteligentes, identifican el sistema con una red neuronal, por el algoritmo de Nelder-Mead y obtienen un modelo ARMAX optimizado de tercer orden que refleja la dinámica del sistema. Rubio y colaboradores (Rubio et al., 2007), teniendo en cuenta que la dinámica de los actuadores electro-neumáticos varía con la posición del émbolo del cilindro, hacen la identificación experimental del modelo en función de la posición de la carga cerrando un lazo de control con un regulador proporcional y empleando como referencia una señal PRBS centrada en diferentes posiciones que cubren toda la carrera del cilindro. Para ello se divide la carrera del cilindro en tramos, se definieron nueve posiciones (40 mm, 80 mm,… 360 mm) y se identifica alrededor de cada uno de ellos cerrando un lazo de control de posición. Obtiene un modelo lineal, de tercer orden tipo uno y la estructura ARMAX resultó ser la que mejores.
(23) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 15. resultados ofrece. El experimento real se realiza durante 10 segundos muestreando a 1.0 ms. 1.4 Control Predictivo Basado en Modelos El Control Predictivo (Model Predictive Control, MPC) se desarrolló a finales de los setenta y ha tenido un desarrollo considerable desde entonces. El término Control Predictivo no designa a una estrategia de control particular sino a un conjunto de métodos de control que hacen uso explícito de un modelo del proceso para obtener la señal de control minimizando una función objetivo. Estos métodos de control llevan a controladores que tienen básicamente la misma estructura y los mismos elementos: uso explícito de un modelo para predecir la evolución del proceso en los instantes futuros. minimización de una función objetivo. utilización de un horizonte de control finito y deslizante que implica el cálculo de la secuencia de control para todo el horizonte, pero con la aplicación de la primera señal de la secuencia y la repetición de todo el proceso en el siguiente instante de muestreo. Los distintos algoritmos de control predictivo difieren en el tipo de modelo utilizado para representar al proceso y a las perturbaciones y la función objetivo considerada. Existen aplicaciones de control predictivo a diversos procesos que van desde procesos tan diversos como robots (Gómez Ortega et al., 2001) a la anestesia clínica (Linkers and Mahfonf, 1994). Aplicaciones en la industria de cemento, desecadoras, brazos robóticos, se pueden encontrar descritas en (Clarke, 1988), mientras que desarrollos para columnas de destilación, plantas de PVC, generadores de vapor y servos se presentan en (Richalet, 1993) y (Richalet et al., 1978). El control predictivo presenta una serie de ventajas sobre otros métodos, entre las que se pueden citar las siguientes: es una técnica particularmente atractiva para los operadores, pues aunque se requieren determinados conocimientos de control, la sintonización es posible realizar siempre que se tengan los conocimientos básicos necesarios..
(24) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 16. se puede utilizar para controlar una gran variedad de procesos, desde muy simples hasta con dinámicas complejas, con grandes tiempos muertos, de fase no mínima, inestables o multivariables. su carácter predictivo lo hace compensar intrínsecamente los tiempos muertos. introduce un control anticipativo (feed forward) y de forma natural se compensan las perturbaciones medibles. la ley de control resultante es fácilmente implementable si se tienen los requerimientos computacionales necesarios. es muy útil cuando se conocen las referencias futuras, como ocurre en el caso de robótica o procesos por lotes. permite tratar las restricciones de una forma sistemática y conceptualmente muy simple durante la fase de diseño. Como es lógico, tiene también sus inconvenientes. El principal es que, aunque su implementación no es compleja, resulta más difícil que la de los clásicos controladores PID. Si la dinámica del proceso no cambia y no existen restricciones, la mayor parte de los cálculos se pueden realizar fuera de línea y el controlador resultante es simple, pudiéndose aplicar a procesos de dinámicas rápidas, en caso contrario, los requisitos de cálculo son mucho mayores. Aunque hay que decir que debido a la potencia de los computadores actuales esto no es realmente una dificultad insalvable. La mayor dificultad que presenta para su aplicación es la necesidad de un modelo apropiado del proceso. El control predictivo ha demostrado ser en la práctica una estrategia razonable de control y ha sido aplicado con éxito a numerosos procesos industriales (Camacho and Bordons, 1995), (Camacho and Bordons, 1999), (Clarke, 1988). 1.5 Estrategias de control Desde hace una década se vienen haciendo algunas investigaciones aisladas sobre la aplicación del control predictivo a la robótica, entre los cuales se puede citar el artículo consultado sobre el tema (Vivas, 2006), donde se ha considerado el control avanzado de los movimientos complejos de un robot tipo SCARA. El.
(25) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 17. desempeño en el seguimiento de consignas complejas, el rechazo de perturbaciones y el comportamiento frente a errores en el modelo son comparados en simulación utilizando un tiempo de muestreo de 1 ms y tres tipos de controladores: control clásico PID y dos estrategias basadas en el modelo del robot (el control por par calculado (CTC) y el control predictivo funcional (PFC)). Para probar el desempeño de estos controladores se introdujeron trayectorias complejas al sistema (trayectoria circular de pequeño diámetro, trayectoria lineal con cambio de ángulo), similares a aquellas que pueden ser encontradas en un ámbito de fabricación industrial. Igualmente se realizaron pruebas con el fin de medir la robustez de estos controladores, pruebas consistentes en la introducción de una perturbación externa y en la introducción de errores en los valores nominales de los parámetros dinámicos (para el caso de los dos controladores basados en el modelo). Los resultados muestran que el control predictivo funcional provee los mejores resultados en casi todos los casos, gracias a su capacidad para anticipar los cambios presentes en el sistema. Estos resultados muestran las grandes capacidades que tiene el control predictivo para resolver problemas de control en el campo de la robótica industrial. En otro artículo Vivas (Vivas, 2005) hace énfasis sobre los tipos de controladores a implementar en robótica paralela, con el fin de aprovechar al máximo la alta dinámica con que ellos funcionan. Dada la alta dinámica desarrollada por este tipo de robots, controladores clásicos del tipo PID no fueron suficientes en este trabajo para garantizar precisión y robustez. Se expusieron por lo tanto dos controladores basados en el modelo del robot: el control por par calculado, de amplia difusión en robótica industrial, y de manera especial, el control predictivo funcional, el cual se perfila como una solución interesante al control de este tipo de mecanismos. Los resultados obtenidos en experimentación muestran los respectivos desempeños frente al seguimiento de trayectorias complejas. En el artículo de Vivas y Poignet (Vivas and Poignet, 2009) presentan una aplicación eficiente de un control por modelo de referencia sobre un robot paralelo. El control utilizado es un control predictivo funcional el cual hace uso de un modelo dinámico simplificado del robot. Las pruebas experimentales son realizadas sobre.
(26) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 18. el robot H4, robot paralelo que posee 3 grados de libertad en translación y un grado de libertad en rotación. Tres estrategias de control son comparadas (PID, control por par calculado y control predictivo funcional), con consignas complejas similares a las utilizadas en procesos de fabricación y utilizando un período de muestreo de 1.5 ms. Los resultados son analizados desde el punto de vista de seguimiento de trayectorias y de robustez. Los resultados muestran que el control predictivo funcional provee los mejores resultados en todos los casos, gracias a su capacidad para anticipar los cambios presentes en el sistema. Albán (Albán, 2007) ha considerado el control avanzado de los movimientos complejos de un robot paralelo. El desempeño en el seguimiento de consignas complejas y el rechazo de perturbaciones, son comparadas experimentalmente utilizando tres tipos de controladores: control clásico PID y dos estrategias basadas en el modelo del robot, a saber, el control por par calculado (CTC) y el control predictivo funcional (PFC). Para las dos estrategias basadas en el modelo, el proceso es primero linealizado por realimentación. Para el caso del control predictivo funcional, se realiza una identificación del modelo, representando el sistema como una función de segundo orden y estabilizándola por medio de una realimentación de velocidad. Para probar el desempeño de estos controladores, se introducen trayectorias complejas al sistema (trayectoria circular de pequeño diámetro, trayectoria lineal con cambio de ángulo), similares a aquellas que pueden ser encontradas en un ámbito de fabricación industrial. Igualmente se realizaron pruebas con el fin de medir la robustez, pruebas consistentes en perturbaciones externas representadas por un cambio de carga. Los resultados muestran que el control predictivo funcional provee los mejores resultados en todos los casos, gracias a su capacidad para anticipar los cambios presentes en el sistema. Estos resultados muestran las grandes capacidades que tiene el control predictivo para resolver problemas de control en el campo de la robótica industrial y en particular de la robótica paralela. En la tesis de Rodríguez (Rodríguez, 2008) se presenta un método de análisis y diseño de un controlador para actuadores electro-neumáticos. El análisis del modelo físico de estos sistemas se hace con un nuevo enfoque: se considera la.
(27) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 19. diferencia entre las constantes de tiempo de las cámaras del cilindro y se tiene en cuenta el subdimensionamiento del carrete de la válvula. Como resultado se obtiene un modelo que describe de forma más precisa la dinámica de estos sistemas. El modelo es validado con la identificación experimental por tramos de un sistema electro-neumático de pruebas. Luego, partiendo del modelo, se propone el diseño de un controlador lineal por ubicación de polos cuyo desempeño se verifica en la planta de pruebas. Finalmente, este método de análisis y diseño es aplicado en una plataforma industrial electro-neumática de dos grados de libertad (simulador de conducción), donde se alcanzan resultados satisfactorios en cuanto al posicionamiento continuo de las cargas. Jia Ma y colaboradores en su investigación (Ma et al., 2008) estudian el control de una válvula de escape electro neumático (EPVA) para motores de combustión interna. La estrategia de control desarrollada utiliza técnicas de control predictivo basado en modelo para superar la presión variable al azar en el cilindro contra el cual se abre la válvula de escape. Bone y colaboradores (Bone et al., 2014) presenta el diseño, modelado y control de posición de un nuevo actuador híbrido eléctrico-neumático para aplicaciones en robótica y automatización. El diseño incorpora un cilindro neumático y motor de corriente continua conectado en paralelo, para evitar la necesidad de una relación de transmisión alta y reducir en gran medida la impedancia mecánica. Se propone un algoritmo de modelo predictivo de control discreto valioso (DVMPC) para controlar la posición del cilindro neumático con electroválvulas on/off de bajo costo. Se propone una variante de control de la dinámica inversa para el motor de corriente continua. Resultados de la simulación para el control de posición de los actuadores neumáticos con diferentes velocidades de válvula y los coeficientes de fricción, muestran que el algoritmo DVMPC supera a un algoritmo de control de modo deslizante en términos de error de posición y vida de la válvula esperados. En el trabajo de Osman y colaboradores (Osman et al., 2013) se presenta un diseño del modelo y el controlador para un sistema de accionamiento neumático. El modelo del sistema de accionamiento neumático (función de transferencia) se.
(28) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 20. obtiene por el método de Identificación de Sistemas (SI). Se selecciona el Control Predictivo Funcional (PFC) con el diseño de observadores como estrategia de control para el sistema neumático. La evaluación del desempeño del controlador se realiza en MATLAB y se valida a través de experimentos en tiempo real. El resultado muestra que el controlador PFC está adaptado para el sistema y es capaz de controlar con éxito tanto en la simulación como en el experimento. En otro de los trabajos de Osman y colaboradores (Osman et al., 2012) se propone el controlador predictivo generalizado (GPC) como estrategia de control para un cilindro neumático inteligente. Para validar y comparar el rendimiento, también se presenta un PID. Todos los criterios, excepto el porciento de error de estado estacionario, muestran que el controlador GPC tiene la capacidad de controlar la planta sin problemas y con una respuesta más rápida en comparación con el PID. En el trabajo de Mustafa y colaboradores (Mustafa et al., 2014), el controlador predictivo generalizado (GPC) se propone como estrategia para el control de la fuerza neumática del cilindro. Para validar y comparar el rendimiento, también se presenta un controlador proporcional-integral (PI). Ambos algoritmos controladores GPC y PI se desarrollan utilizando el modelo lineal del cilindro. Los resultados se presentan en la simulación y el enfoque experimental utilizando MATLAB-Simulink como plataforma. Los resultados muestran que el GPC proporciona una respuesta rápida con menor error de estado estacionario y porcentaje de sobreimpulso en comparación con el PI. 1.6 Consideraciones finales del capítulo El uso de métodos de identificación experimental para la obtención de un modelo del sistema electroneumático aporta resultados que pueden ser utilizados para la implementación de estrategias de control predictivo basado en modelo. Según lo visto en los trabajos encontrados en las estrategias de control, el control predictivo manifiesta mejores resultados que los controladores clásicos del tipo.
(29) CAPÍTULO 1. REVISIÓN BIBLIOGRÁFICA. 21. PID en cuanto a precisión y robustez, tanto en robots paralelos como en sistemas electro-neumáticos. Las. comparaciones entre. estrategias. de. control. muestran. las. grandes. capacidades que tiene el control predictivo para resolver problemas de control en el campo de la robótica industrial y en buena parte de los casos de la robótica paralela. La alta dinámica desarrollada por los robots paralelos necesita esquemas de control más apropiados que los convencionales basados en PI o PID para gobernar tales sistemas..
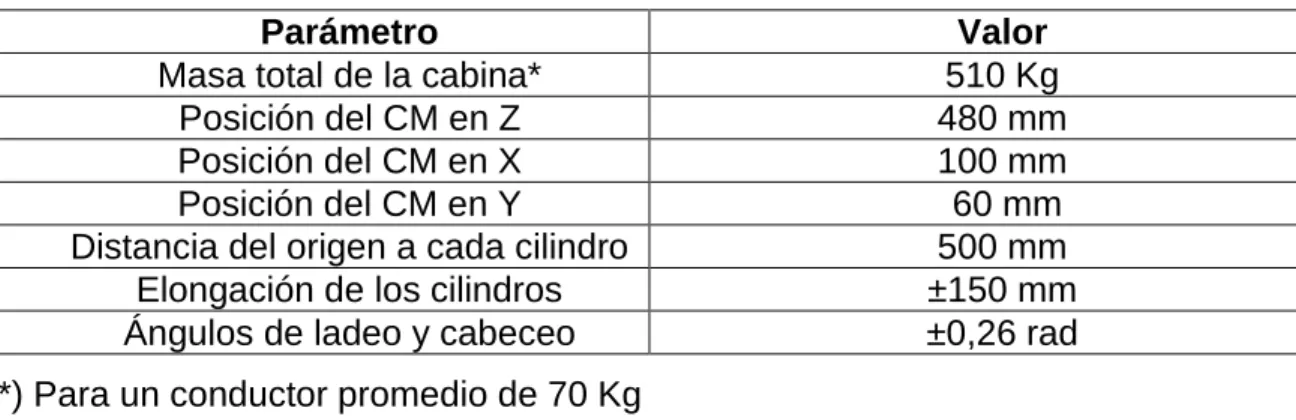
(30) CAPÍTULO 2. MATERIALES Y METODOS. 22. CAPÍTULO 2. SÍNTESIS DEL CONTROLADOR PREDICTIVO PARA EL ROBOT PARALELO DE 2GDL. En este capítulo se realiza una breve descripción de la plataforma objeto de estudio y se mencionan algunos de los parámetros más importantes de la misma. Se vuelve a obtener el modelo de la plataforma a través de una identificación experimental, dado que ha estado sin usarse un largo tiempo, dando cabida a posibles variaciones en los coeficientes de fricción. Se realiza una explicación del funcionamiento de la estrategia del MPC, su obtención y sintonía, para lo cual se emplea el modelo antes identificado. 2.1 Descripción de la plataforma de dos grados de libertad El simulador de conducción utilizado para este trabajo ha sido desarrollado por SIMPRO y es ampliamente utilizado en entrenamiento de personal. Consta originalmente de una cabina con todos los mandos reales a los que se enfrenta el conductor en un vehículo y un monitor a través del cual puede ver el mundo virtual por el que se mueve. La cabina pivota sobre una columna central mediante una articulación tipo cardán y se estabiliza en un plano mediante la acción de dos cilindros neumáticos que, ubicados en dos de sus extremos perpendiculares, le imprimen al conductor las sensaciones de ladeo y cabeceo, simulando las pendientes del mundo virtual en que se mueve (Figura 2.1). Hay que tener en cuenta que para la realización de este trabajo se usa en lugar de la cabina un contrapeso de 70 kg..
(31) CAPÍTULO 2. MATERIALES Y METODOS. 23. Figura 2.1. Detalle de la estructura mecánica y el sistema electro-neumático.. Según el fabricante del simulador, la condición crítica de movimiento a experimentar por el vehículo simulado se considera como la caída libre de un extremo pivotando en el otro. En estas condiciones, la plataforma debe ser capaz de alcanzar aceleraciones angulares de hasta 2 rad/seg2, que para los cilindros representa aceleraciones lineales de hasta 1000 mm/seg2. Los datos mecánicos más importantes de la plataforma del simulador se ofrecen en la Tabla 2.1 (Moreno, 2000). El origen de coordenadas para las medidas de longitud y ubicación del centro de masa (CM) se establece en el pivote central con la cabina en horizontal. Tabla 2.1. Datos mecánicos del simulador de conducción.. Parámetro Masa total de la cabina* Posición del CM en Z Posición del CM en X Posición del CM en Y Distancia del origen a cada cilindro Elongación de los cilindros Ángulos de ladeo y cabeceo. Valor 510 Kg 480 mm 100 mm 60 mm 500 mm ±150 mm ±0,26 rad. (*) Para un conductor promedio de 70 Kg Cada articulación electro-neumática está formada por un cilindro FESTO DNC100-400 gobernado por una válvula proporcional de flujo FESTO MPYE-5-3/8, y su posición se mide con un encoder rotacional NEMICON OEW2-0512-2MHC. Todo.
(32) CAPÍTULO 2. MATERIALES Y METODOS. 24. el sistema se controla con una computadora personal (PC) a través de una tarjeta de adquisición de datos HUMUSOFT MF624 mediante el Real Time Workshop de MATLAB/SIMULINK (MathWorks, 2004), con período de muestreo de 1 ms. 2.2 Obtención del modelo electro-neumático a través de la identificación experimental El modelo dinámico del sistema electro-neumático de los robots paralelos incluye la válvula y el pistón. Estos constituyen los elementos actuadores de estas estructuras robóticas y soporte de la plataforma móvil, y determinan en gran medida el desempeño dinámico del robot (Kolbus et al., 2008). Para el robot SIMPRO de dos grados de libertad, la posición que toman los actuadores lineales tienen gran incidencia en el posicionamiento continuo de la plataforma móvil, por lo que el modelo dinámico de los mismos será empleado para la síntesis de los controladores que mejoren el desempeño del mecanismo robótico. Debido a que la dinámica de los actuadores electro-neumáticos es altamente no lineal, estas no linealidades influyen en el sistema en forma de perturbaciones, y por tanto, se dificulta el control de los mismos (Hahn, 2005), (Krivts and Krejnin, 2006). En un estudio realizado por Rubio y colaboradores (Rubio et al., 2007), estos presentan un método para el modelado de actuadores electro-neumáticos basado en identificación experimental aplicado a la plataforma neumática de dos grados de libertad. Esta experiencia se aprovechó en este trabajo a la hora de obtener el modelo a utilizar necesario para implementar el control predictivo basado en modelo. El. modelo. analítico. del. actuador. lineal. electro-neumático. considera. el. subdimensionamiento de la válvula y las constantes de tiempo del cilindro, de modo que describe con mayor exactitud la dinámica real del sistema, definiéndose el modelo por la expresión:. (2.1).
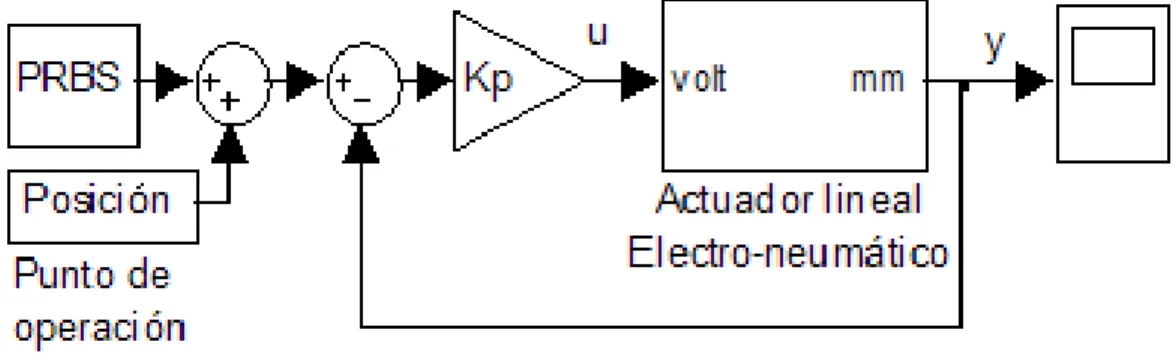
(33) CAPÍTULO 2. MATERIALES Y METODOS. 25. Donde las constantes de tiempo se calculan como: (2.2). A1; A2: Área del pistón en cada cámara (m2) M: Masa (kg) Fv: Fricción viscosa (Ns/m) Y: Posición del vástago (m) Las constantes G1, G2 en (kg/s m2) y C1, C2 en (kg/sPa) se obtienen de las derivadas parciales de las ecuaciones que consideran el flujo másico de aire a través de la válvula proporcional de flujo: qm = f(x; Pent; Psal). Por su parte, las constantes K1p, K2p en (kg/Pa) y K1y, K2y en (kg/m), son obtenidas mediante diferenciación de la ecuación de estado de los gases ideales respecto a la presión y el volumen de aire, dependientes de la posición del pistón (Rubio et al., 2007). Teniendo en cuenta lo antes expuesto, se identifica dinámicamente el sistema válvula-pistón de una extremidad activa del robot de 2 GDL. Para ello se emplea el esquema de identificación de lazo cerrado que se muestra en la Figura 2.2 debido a que el sistema es inestable en lazo abierto, y se utiliza un período de muestreo de un milisegundo (ms). La identificación se realiza alrededor del valor de posición central de un cilindro, donde el modelo que se obtiene es el que tiene los polos complejos conjugados más próximos al origen del plano del lugar de las raíces, que sin dudas, es la dinámica más exigente (Varseveld and Bone, 1997).. Figura 2.2. Diagrama de identificación de lazo cerrado para el sistema electro-neumático..
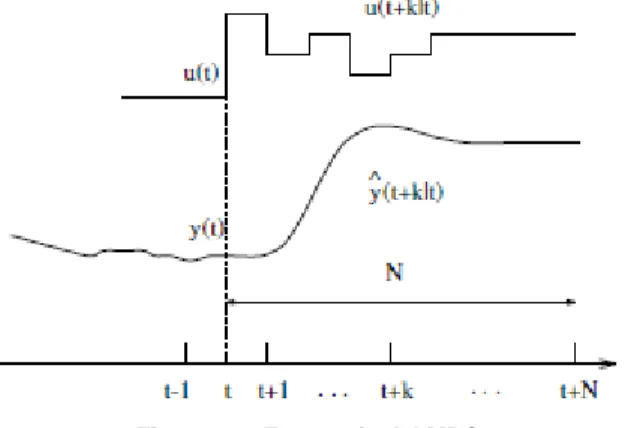
(34) CAPÍTULO 2. MATERIALES Y METODOS. 26. La frecuencia y amplitud de la señal binaria pseudoaleatoria (PRBS) de entrada, así como el valor de ganancia proporcional Kp, se escogen para garantizar que el sistema responda persistentemente excitado. La función transferencial del subsistema válvula-pistón que relaciona la posición del actuador Y(s) con el voltaje de entrada aplicado a la servoválvula U(s), adquiere la forma de la ecuación de tercer orden tipo 1 (2.3), donde ωn y φ representan la frecuencia natural no amortiguada y razón de amortiguamiento del sistema respectivamente, mientras que Ke indica la ganancia.. (2.3). El modelo resultante para la articulación neumática es: (2.4). El modelo obtenido con un FIT de 88.57 % (porciento de ajuste definido en el Toolbox de identificación) se emplea para el diseño del controlador predictivo para el posicionamiento del pistón electro-neumático. 2.3 Estrategia del MPC La metodología de todos los controladores pertenecientes a la familia MPC se caracteriza por la siguiente estrategia, representada en la Figura 2.3:. Figura 2.3. Estrategia del MPC..
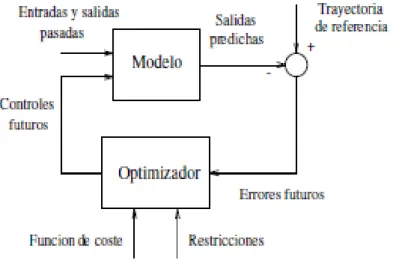
(35) CAPÍTULO 2. MATERIALES Y METODOS. 27. Las salidas futuras para un horizonte determinado N, llamado horizonte de predicción, se predicen cada instante t utilizando el modelo del proceso. Estas predicciones de la salida y(t + k│t) 1 para k = 1. . . N dependen de los valores conocidos hasta el instante t (entradas y salidas conocidas) y de las señales de control u(t + k│t), k = 0 . . . N - 1, que han de ser calculadas y enviadas al sistema. La secuencia de señales de control futuras se calcula minimizando un criterio para mantener al proceso lo más cerca posible de la trayectoria de referencia w(t + k). Este criterio toma normalmente la forma de una función cuadrática del error entre la salida predicha y la trayectoria de referencias futuras. En la mayor parte de los casos se incluye también el esfuerzo de control dentro de la función objetivo. La solución explícita se puede obtener cuando el criterio es cuadrático y el modelo lineal, en caso contrario se ha de utilizar un método numérico para buscar la solución (Bordóns, 2000). La señal de control u(t│t) se envía al proceso mientras que el resto de las señales calculadas no se consideran, ya que en el instante siguiente de muestreo y(t + 1) es ya conocida, y los pasos anteriores se repiten con este nuevo valor. Por lo que u(t + 1│t + 1) se calcula con información diferente y en principio será también diferente de u(t + 1│t). La Figura 2.4 muestra la estructura básica necesaria para implementar el control predictivo. Se usa un modelo para predecir la evolución de la salida o estado del proceso a partir de las señales de entrada y salidas conocidas. Las acciones de control futuras se calculan con el optimizador, que considera la función del coste y las posibles restricciones. El modelo de proceso juega, en consecuencia, un papel decisivo en el controlador. El modelo elegido debe ser capaz de capturar la dinámica del proceso para predecir de forma precisa la evolución del sistema. Al mismo tiempo, debe ser suficientemente simple de implementar y entender. Las distintas metodologías del control predictivo difieren fundamentalmente en el tipo de modelo utilizado..
(36) CAPÍTULO 2. MATERIALES Y METODOS. 28. Figura 2.4. Estructura básica del MPC.. El optimizador es otra parte fundamental de la estructura ya que permite obtener las acciones de control a aplicar. Si la función de coste es cuadrática, el modelo lineal y no existen restricciones, se puede obtener una solución explícita. Si este no es el caso, se ha de acudir a un algoritmo numérico de optimización que requiere mayor capacidad de cálculo. El tamaño del problema resultante depende del número de variables, de los horizontes de control y predicción, y del número de restricciones. Nótese que la estrategia de control predictivo es muy similar a la estrategia que se utiliza cuando se conduce un automóvil. El conductor conoce la trayectoria de referencia deseada para un horizonte de control finito. Tomando en consideración las características del automóvil (modelo mental del automóvil) decide qué acción de control tomar (acelerador, frenos, volante, marchas) para seguir la trayectoria deseada. Sólo la primera acción de control de la secuencia calculada mentalmente es aplicada por el conductor en cada instante y el procedimiento se repite en los sucesivos instantes utilizando el concepto de horizonte deslizante (Bordóns, 2000). Nótese que cuando se utiliza un esquema de control clásico como PID se utilizan sólo las señales pasadas. Esta forma de conducir el automóvil sería como conducir utilizando el espejo retrovisor tal como se muestra en la Figura 2.5. Esta analogía no es totalmente justa con los PIDS, porque el control predictivo utiliza.
(37) CAPÍTULO 2. MATERIALES Y METODOS. 29. más información (trayectoria de referencia). Nótese que si se le proporciona al PID como referencia un punto en la trayectoria futura la diferencia entre ambas estrategias de control no parecerá tan abismal.. Figura 2.5. MPC en conducción de un automóvil.. 2.3.1 Elementos del control predictivo El control predictivo está formado por los siguientes elementos (Camacho and Bordons, 1999): Modelo de predicción: es el modelo matemático que describe el comportamiento esperado del sistema. Este modelo puede ser lineal o no lineal, en tiempo continuo o en tiempo discreto, en variables de estado o en entrada salida. El hecho de que el problema de optimización implicado se resuelva mediante el computador, así como la técnica de horizonte deslizante con la que se aplica la solución, hace que sea más natural considerar modelos discretos que continuos, por ello, en lo que sigue, se consideran modelos en tiempo discreto. Dado que los modelos en el espacio de estados son más generales que los modelos entradasalida, en lo que sigue se adopta dicha formulación. Se considera además que el origen es el punto de equilibrio en el que se quiere regular el sistema, lo cual no resta generalidad pues se puede conseguir con un cambio de variables adecuado. Así el modelo de predicción considerado tiene la forma. .. Función de coste o pesos: es la función que indica el criterio a optimizar. Es una función definida positiva que expresa el coste asociado a una determinada evolución del sistema a lo largo del horizonte de predicción N. Dado que el coste considera el comportamiento del sistema hasta un horizonte N, este depende del estado actual del sistema. y de la secuencia de N actuaciones. que se aplican durante el horizonte de predicción..
(38) CAPÍTULO 2. MATERIALES Y METODOS. 30. Restricciones: indican los límites dentro de los cuales debe discurrir la evolución del sistema. La evolución de las señales de un sistema no debe exceder determinadas restricciones que, ya sea por límites físicos o bien por motivos de seguridad, se imponen al sistema. Por ejemplo, los límites de los actuadores forman parte de estas restricciones. La necesidad, generalmente por motivos económicos, de trabajar en puntos de operación cercanos a los límites físicos admisibles del sistema ha provocado la necesidad de incorporar dichas restricciones en la síntesis de los controladores. 2.3.2 Sintonía del control predictivo Para la sintonía de un controlador predictivo se deben seleccionar varios parámetros de diseño. A continuación se establecen algunas recomendaciones para realizar este proceso. T: Período de muestreo. Debe seleccionarse como parámetro de diseño. Debe ser lo suficientemente pequeño para que no se pierda información de la dinámica del proceso. Sin embargo, un T muy pequeño hace N grande, lo cual es indeseable. De modo que es necesario buscar un compromiso. N: Se selecciona de tal forma que N T. tiempo de establecimiento,. tomando a este como el tiempo necesario para que la respuesta a lazo abierto alcance entre el 95 y el 99 % del valor final. Valores de N entre 20 y 70 son típicos en la literatura. Una buena regla práctica es tomar N tal que hN sea del orden del error permitido. El caso es que se tome lo suficientemente alto para que no haya errores altos de truncamiento en el modelo de convolución. NP: Horizonte de predicción para la optimización. Incrementos de este parámetro ofrece acciones de control más conservadoras, pero a un costo computacional más alto. Cutler y Ramaker (Cutler and Ramaker, 1980) recomiendan tomar NP = N - NC. NC: Horizonte de control (número de acciones de control que serán calculadas en el proceso de optimización para reducir el error)..
(39) CAPÍTULO 2. MATERIALES Y METODOS. 31. Es también el orden del mando de modo que cuanto mayor sea, más alto será el costo computacional. Como regla se puede tomar NC tal que NC* T = t60, lo cual es el tiempo necesario para que la respuesta a lazo abierto alcance el 60 % del valor final. Si se toma NC = NP resulta un control deadbeat. Valores pequeños de NC hacen el control robusto (insensible a las incertidumbres del modelo). W1 y W2: Matrices pesante definidas positivas. Generalmente W 1 = INC (matriz identidad de orden NC) y W 2 = f INC. f: parámetro escalar de diseño que penaliza las variaciones de los mandos m. Cuanto mayor sea f, menor será el rigor del control. Para f = 0 la ganancia del controlador es muy sensitiva a NC, debido a que resultan matrices mal condicionadas. 2.4 Obtención del controlador MPC El método de diseño está basado en el desempeño predicho del proceso dado por el modelo de convolución. Básicamente consiste en calcular los valores predichos de la señal de mando para cumplir ciertas características durante un horizonte NC. Un instante de muestreo después de aplicar al proceso la primera variación del mando se mide la salida y se compara con el valor predicho. Aquí estaría presente la acción correctora de la realimentación (feedback). Los cálculos anteriores se repiten en todos los períodos de muestreo. El objetivo de control es mantener la salida predicha y corregida. tan cerca como sea posible del valor deseado. (set-point). La trayectoria del set point se denota como: (2.5) Se definen los siguientes errores:.
(40) CAPÍTULO 2. MATERIALES Y METODOS. 32. (2.6). : especifica los errores entre el set point y los valores de salida predichos y corregidos. : es una medida de los errores en lazo abierto, pues se basa solamente en las acciones pasadas de control. : salida real en cada instante k. : son elementos del vector de predicción, que esencialmente influyen sobre las futuras predicciones de C basado en los cambios de entrada previamente implementados (salida predicha). O sea, el error actual. se corrige por los. que se deben a las. acciones pasadas. No incluye acciones futuras: (2.7) Sin embargo,. se refiere a la predicción en lazo cerrado pues se basa en. acciones actuales y futuras de control (incluidas en los. ).. La ecuación de la salida predicha y corregida se puede poner como: (2.8) Restando de [r] ambos miembros:. (2.9). De modo que:.
(41) CAPÍTULO 2. MATERIALES Y METODOS. 33 (2.10). Para una correspondencia perfecta entre el set point y la salida real es necesario que: (2.11) O sea: (2.12) De modo que si A es cuadrada de orden (NP x NP) y no singular (que a 1. 0), la. variación del mando estaría dado por: (2.13) Sin embargo, el mando anterior resulta insatisfactorio en la práctica cuando NC=NP. Ello se debe a que (2.13) se comporta en este caso como un mínimo prototipo (deadbeat) con demasiado movimiento en el control. Tanto el control por matriz dinámica (DMC) como el control por el algoritmo del modelo (MAC) requieren que NC < NP. En ese caso el sistema (2.12) es sobredeterminado (más ecuaciones que incógnitas), en estas condiciones la matriz dinámica A es de orden (NP x NC). Para este caso los precursores del control predictivo proponen una solución estructurada en un proceso de optimización basado en el principio de los mínimos cuadrados de los errores. En efecto, sea el funcional:. (2.14).
(42) CAPÍTULO 2. MATERIALES Y METODOS. Ahora se minimiza J respecto a. 34. m haciendo: (2.15). Se aplica el concepto de diferenciación con relación a un vector y se tiene: (2.16). De donde: (2.17) En este caso a. se le conoce como la pseudoinversa de A. Si se hace (ganancia del controlador predictivo), se tiene: (2.18). El controlador ofrece una detección temprana de errores en la modelación de los disturbios y los corrige. Puesto que solamente el primer elemento del vector se aplica y. es triangular, sólo se necesita calcular. y el gasto. computacional se alivia porque no es necesario resolver completamente (2.17). Puesto que se trata de minimizar el error, pueden resultar ganancias. altas y. por lo tanto grandes cambios en la variable manipulada. Este fenómeno se presenta cuando. es mal condicionada (número de condición muy alto) o está. muy cerca de ser singular. Cutler y Ramaker (Cutler and Ramaker, 1980) resolvieron este problema multiplicando los elementos de la diagonal principal de por un factor de peso mayor que uno antes de ejercer la inversión e introdujeron también factores pesantes en el mando. En definitivas el funcional. se modifica. como sigue: (2.19) Al minimizar resulta:.
(43) CAPÍTULO 2. MATERIALES Y METODOS. 35 (2.20). O sea: (2.21) En este caso W 1 y W 2 son matrices pesantes definidas positivas. Estas matrices son útiles en la sintonía final del controlador predictivo al posibilitar un mando menos oscilatorio y de menor magnitud. 2.5 Consideraciones finales del capítulo El modelo obtenido a través de identificación experimental presenta un adecuado porciento de ajuste, lo cual evidencia que responde debidamente a la dinámica real del proceso. La exactitud de los modelos estimados es de vital importancia para alcanzar buenas prestaciones en estrategias de control basadas en modelos. Se puede notar que el método de control predictivo requiere de un cómputo determinado dada la dinámica rápida de los robots paralelos. El ajuste de los pesos en el índice de optimización juega un papel importante en el comportamiento dinámico del mando del controlador y de la salida de la planta..
Figure

+7





Outline
Documento similar
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
sentido, se han identificado y analizado variables que vienen a ser el insumo para el modelo predictivo, basado en la identificación de variables que definen las
