Diseño de sistema de control avanzado para el péndulo invertido lineal doble para que pueda mantenerse en posición vertical invertida ante cualquier perturbación. Aunque para ello se tienen que utilizar técnicas de control avanzadas, porque con los métodos de control clásicos no se pueden conseguir respuestas correctas y óptimas en tiempos de estabilización cortos. El objetivo final de este proyecto es diseñar e implementar dos técnicas de control avanzadas en un prototipo de doble péndulo invertido sobre un carro que estabilice los péndulos en una posición vertical más alta con respecto al ángulo inicial de ambos péndulos.
La primera estrategia de control corresponde al control óptimo LQR, la segunda estrategia es el control difuso basado en relaciones entrada-salida representadas por un conjunto de reglas difusas que relacionan causa con efecto.
ASPECTOS GENERALES
- Sistemas dinámicos
- Espacio de estados
- Ecuaciones de Lagrange
- Lagrangiano
- Control LQR
- Control difuso (Lógica difusa)
- Modelo difuso Takagi-Sugeno
- Nivel funcional
- Nivel de sistema
- Nivel de subsistema
- Nivel de componentes
- Prototipado
La ecuación 1 representa la ecuación de estado, donde 𝒙̇ es el vector de estado, A la matriz de estado, B la matriz de salida y u el vector de control o entrada. Cuando es una planta no lineal, el cálculo de las constantes de control se debe realizar en base al punto de operación, por lo que es necesario elegirlo primero dentro del rango de operación de la planta. La Figura 2 muestra las diferentes transformaciones que sufren las variables y los datos en un bucle de control difuso.
Capacidad para equilibrar un sistema inestable y no lineal utilizando dos técnicas de control avanzadas diferentes: Fuzzy y LQR.
![Figura 1. Lazo de control óptimo [11]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/17.918.187.813.478.663/figura-1-lazo-control-óptimo-11.webp)
PÉNDULO INVERTIDO DOBLE LINEAL (PIDL)
Cinemática del sistema
La velocidad resultante de cada masa está dada por la raíz cuadrada de la suma de los componentes 𝒙 y 𝒚 al cuadrado:.
Análisis de energía
Donde 𝑈0 es la energía potencial de la base móvil, 𝑈1 la energía potencial del primer péndulo y 𝑈2 la energía potencial del segundo péndulo.
Ecuaciones de movimiento
Motor de corriente continua
Se supone que existe una relación proporcional 𝐾𝑒 (constante vs. electromotriz) entre el voltaje inducido del inducido y la velocidad del eje del motor. 𝑅.𝑑 (56) A continuación se muestran los parámetros eléctricos del motor de CC "Canon NF5475" usado, que funciona como actuador en el sistema. Los datos de corriente, voltaje y velocidad angular del motor se toman de la hoja de datos (Apéndice B) considerando su funcionamiento sin carga.
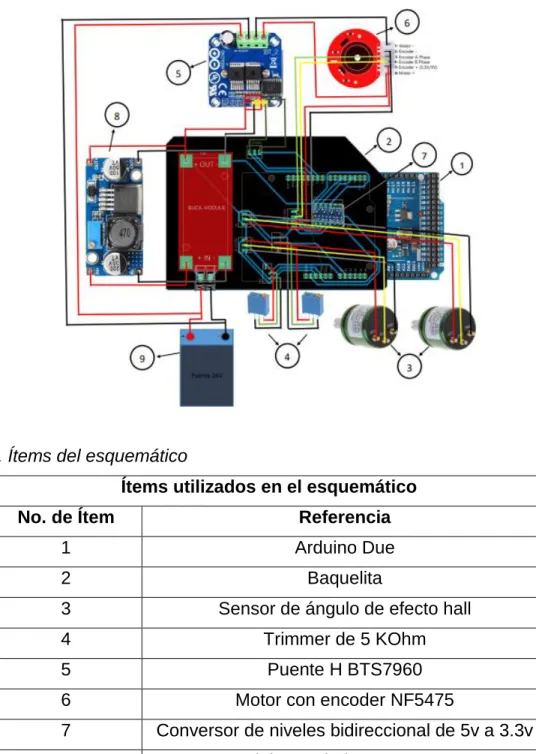
En las Figuras 7 y 8 se pueden observar todos los componentes utilizados con la numeración de la Tabla 3, los números están a nivel de ensamblaje y también a nivel de despiece.
![Figura 5. Diagrama de un motor de corriente continua [15].](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/28.918.236.766.167.399/figura-diagrama-de-un-motor-de-corriente-continua.webp)
Parámetros del prototipo
Actuador
- Driver del actuador
El motor elegido es el motor DC de referencia “NF5475E” de Canon, que funciona a 24V y dispone de un codificador de 200 CPR (Ciclos por rotación). Se seleccionó el controlador BTS7960 para el motor de CC, que tiene una corriente operativa máxima de 43 A y un rango de voltaje de 5,5 V a 27 V para el funcionamiento del motor. La razón fundamental fue su capacidad para soportar la corriente máxima de 7.246 A según la información proporcionada por la hoja de datos del motor (Apéndice B).
Sensores
- Caracterización de los sensores
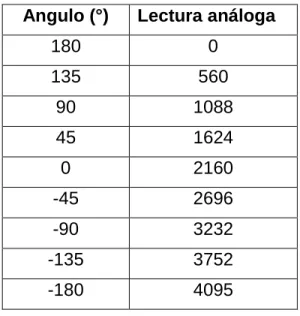
Para leer las posiciones angulares de los péndulos, se eligió el sensor óptico con un ángulo de rotación de 0 a 360° sin el ángulo muerto del efecto Hall. En concreto se eligió la referencia P3022-V1-CW360 por tener una resolución de lectura de 12 bits (4096) necesaria para el sistema, además de su bajo coste y facilidad de implementación al tratarse de un sensor analógico. Para la caracterización del encoder incremental conectado al motor, se tiene en cuenta que es bifásico, por lo que tiene pulsos en ambos canales, un total de 100 pulsos por canal cada vez que el eje del motor hace una revolución, esto significa que el codificador tiene 200 pulsos en su salida.
La ecuación muestra la función obtenida para la lectura del sensor, donde 𝑥 es el valor leído por el codificador.
Sistema de adquisición de datos
Fuente de alimentación
Conexiones
Puede encontrar una explicación detallada del esquema de conexión entre elementos individuales en el (Apéndice C). Para ello se toman datos experimentales de la variación de los ángulos de inclinación de los dos eslabones y de la variación de la posición de la base móvil frente a la entrada sinusoidal. Al mostrar estos datos gráficamente, puedes observar el comportamiento de las señales (𝜃0, 𝜃1, 𝜃2) en la Figura 14 durante un período de 10 segundos.
En la figura 15 se puede observar que los datos obtenidos experimentalmente de los ángulos de inclinación de los eslabones (𝜃1 𝑦 𝜃2) tienen el mismo comportamiento que el modelo no lineal del sistema, así como el desplazamiento de la base móvil (𝜃0) aunque el las señales tienen una pequeña fase de desplazamiento.
Estimación de parámetros
Al final de este experimento se obtiene la estimación de parámetros como se muestra en la Figura 16. Finalmente se encuentra el ajuste de las señales de Bes, con un 83.62% de éxito en el movimiento de la base móvil, un 76.34% en la posición angular del primer enlace, y 65,52% en la posición angular de la segunda articulación. Los valores iniciales fueron determinados mediante pruebas de laboratorio y las ecuaciones de la Sección 2.1.4 correspondientes a un motor de corriente continua.
![Figura 16. Ajuste de los datos experimentales con el modelo no lineal [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/41.918.175.848.207.577/figura-16-ajuste-datos-experimentales-modelo-lineal-autor.webp)
Validación de parámetros
CONTROL
- Puntos de equilibrio
- Linealización del modelo por espacio de estados
- Modelo de espacio de estados en tiempo discreto
- Diseño del controlador LQR
- Simulación del control LQR
- Diseño del control difuso
- Construcción de las funciones de pertenencia
- Base de reglas
- Inferencia
- Simulación del control Difuso del PIDL
Las matrices diagonales 𝑄 y 𝑅, explicadas en la Sección 3.3, se definen para lograr una buena respuesta transitoria al movimiento de la base móvil y a los ángulos de inclinación de los enlaces. El movimiento de la base móvil (salida 1) se estabiliza en unos 4 segundos, mientras que el cambio de ángulo del brazo inferior (salida 2) y el ángulo del brazo superior (salida 3) se estabiliza en 1,5 segundos. La Figura 21 muestra la operación de control del sistema bajo las condiciones iniciales anteriores.
La Figura 29 muestra la respuesta transitoria del sistema con el controlador Difuso dado un punto inicial de 5° para ambos enlaces con respecto a su punto de equilibrio que es 0°. El desplazamiento de la base móvil (Salida 1) se estabiliza en un tiempo de unos 5 segundos, mientras que la variación del ángulo del brazo inferior (Salida 2) y el del brazo superior (Salida 3) se estabiliza en un tiempo de 2 segundos. . En la figura 32 se puede ver la acción de control del sistema ante los controladores LQR y Difuso.
Los controladores tienen un comportamiento muy similar en las 3 salidas, aunque al mover la base móvil el controlador LQR consigue estabilizarse 1 segundo antes que el difuso. El movimiento de la base móvil (Salida 1) se estabiliza en aproximadamente 4,5 segundos, mientras que el cambio en el ángulo del brazo inferior (Salida 2) y el ángulo del brazo superior (Salida 3) se estabiliza en aproximadamente 1,5 segundos. segundos. En la Figura 34 se puede ver el funcionamiento de control del sistema antes de los controladores LQR y Difuso.
Los controladores se comportan de forma muy similar en las 3 salidas, aunque al mover la base móvil el controlador LQR consigue estabilizarse 1 segundo antes que el difuso. La Figura 36 muestra la acción de control del sistema ante los controladores LQR y Difuso.
![Figura 19. Diagrama en lazo cerrado del controlador LQR [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/50.918.196.804.806.1059/figura-19-diagrama-lazo-cerrado-controlador-lqr-autor.webp)
VALIDACIÓN DE LOS CONTROLADORES
Punto de equilibrio
La implementación del controlador LQR diseñado en el apartado 3.3.1 se muestra en la figura 39 donde se observa la respuesta transitoria de las variables, el desplazamiento del carro oscila entre -0.02 y 0.06 [m] permitiendo que el ángulo de ambos enlaces se mantenga cercano. . su punto de equilibrio 0°. El ángulo del primer eslabón varía entre -5° y 6° mientras que el del segundo eslabón varía entre -1,4° y 3°. En la Figura 40 se muestra la acción de control que genera el driver para regular los enlaces, la señal es suave debido al uso del filtro de Kalman aunque tiene picos de 16.5V en algunos momentos.
![Figura 39. Respuesta transitoria del controlador LQR implementado [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/65.918.223.781.254.641/figura-respuesta-transitoria-del-controlador-lqr-implementado-autor.webp)
Punto de equilibrio, Perturbación
Para implementar el controlador suave en el sistema, fue necesario calibrar el punto de equilibrio (0°) en ambos eslabones, como se puede observar en el (Apéndice F).
Punto de equilibrio
Punto de equilibrio, Perturbación
Ahora procedemos a realizar la conexión entre la Baquelita y el Arduino Due, teniendo en cuenta que la Baquelita está diseñada para encajar perfectamente en el Arduino como se ve en la figura 64. Ahora se realiza la conexión entre la Baquelita y el módulo regulador DC, que se encargará de accionar todos los componentes para el correcto funcionamiento del sistema como se muestra en la figura 67. Ahora procedemos a realizar la conexión entre la baquelita y el codificador del motor, el cual será el encargado de la posición de indicar el carro. el carril, el esquema de conexión se puede observar en la figura 69.
Luego de realizar las respectivas conexiones de Baquelita, se realiza la conexión entre el puente H y el motor. El diagrama de conexión se puede ver en la figura 72. Después de realizar la conexión entre el puente H y el motor, el puente H se alimenta con los 24v de la fuente como se ve en la figura 73. En la figura 79 se puede ver que los prismas Los elementos anteriores ya se han colocado en el orden deseado para la interfaz.
Al trazar estos datos, puedes observar el comportamiento de las señales (𝑥, 𝜃) en la figura 94 durante un tiempo de 35 segundos. Al final de este experimento se obtiene la estimación de los parámetros como se puede observar en la figura 96. Siguiendo las ecuaciones que regulan el comportamiento del sistema presentadas en el apartado G.1 y los valores de los parámetros estimados en la tabla 11, el modelo de espacio de estados.
La Figura 99 muestra la respuesta transitoria de un sistema con un controlador LQR que tiene un punto inicial de acoplamiento de 5° con respecto al punto de equilibrio que es 0°. La Figura 100 muestra la operación de control del sistema bajo las condiciones iniciales anteriores. La Figura 111 muestra la acción de control producida por estas perturbaciones; Se observan los picos de tensión enviados por el actuador para estabilizar la conexión.
La Figura 113 muestra la acción de control generada por estas perturbaciones; Se detectan los picos de voltaje enviados por el variador para estabilizar el enlace.
![Figura 46. Acción de control del controlador Difuso ante perturbaciones [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/70.918.174.833.153.636/figura-46-acción-control-controlador-difuso-perturbaciones-autor.webp)
![Figura 6. Vista isométrica del péndulo doble con el prototipo construido [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/30.918.205.800.348.684/figura-vista-isométrica-péndulo-doble-prototipo-construido-autor.webp)
![Figura 8. Vista isométrica del péndulo doble invertido en despiece [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/32.918.192.811.632.1044/figura-vista-isométrica-péndulo-doble-invertido-despiece-autor.webp)
![Figura 9. Velocidad y torque que necesita el sistema en su condición crítica [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/34.918.184.822.159.458/figura-velocidad-torque-necesita-sistema-condición-crítica-autor.webp)
![Figura 15. Comparación de los datos experimentales y el modelo no lineal [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/40.918.171.828.149.506/figura-15-comparación-datos-experimentales-modelo-lineal-autor.webp)
![Figura 22. Diagrama en lazo cerrado del controlador LQR con los filtros Kalman [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/53.918.172.833.197.502/figura-diagrama-lazo-cerrado-controlador-filtros-kalman-autor.webp)
![Figura 38. Visualización de la Interfaz gráfica realizada con el bloque VR Sink [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/64.918.169.839.159.458/figura-visualización-interfaz-gráfica-realizada-bloque-sink-autor.webp)
![Figura 42. Acción de control del controlador LQR ante perturbaciones [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/67.918.211.791.163.598/figura-42-acción-control-controlador-lqr-perturbaciones-autor.webp)
![Figura 47. Respuesta transitoria del controlador LQR y el controlador difuso [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/71.918.231.769.161.618/figura-respuesta-transitoria-controlador-lqr-controlador-difuso-autor.webp)
![Figura 48. Acción de control del controlador LQR y el controlador difuso [Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/12430237.0/71.918.263.739.690.1054/figura-acción-control-controlador-lqr-controlador-difuso-autor.webp)
