ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
PROPUESTA DE CONTROL PARA LA REDUCCIÓN
DE OSCILACIONES EN LA CARGA DE GRÚAS
VIAJERAS
TESIS
QUE PARA OBTENER EL TÍTULO DE INGENIERO
EN COMUNICACIONES Y ELECTRÓNICA
PRESENTAN
RODRÍGUEZ RENDÓN CESAR
RODRÍGUEZ SÁNCHEZ CESAR ALEJANDRO
VARELA FLORES MARLEN VIRIDIANA
ASESORES
DR. RODRIGO LÓPEZ CÁRDENAS
ING. ERASMO VALVERDE TRUJILLO
DR. ERIK LEAL ENRÍQUEZ
ESIME ZAC Página 2
AGRADECIMINETOS.
CESAR RODRÍGUEZ RENDÓN
Agradezco a mis padres Margarita Rendóny Anselmo Rodríguez, quienes estuvieron conmigo durante todo mi recorrido en este gran logro que hoy se ha cumplido, a ellos que siempre me han brindado su apoyo incondicional y han sabido ser guías en mi vida personal y profesional.
También me gustaría agradecer a todos aquellos compañeros y profesores, quienes sin su ayuda, tanto educativa como personal, no hubieran logrado, lo que hoy he concluido. Especialmente agradezco a Viridiana, Fat, Oscar y Brian a ellos que fueron mi soporte y compañía en toda la carrera; pero sobre todoagradezco a Dios por mandarme en el transcurso al motivo de mis próximos éxitos, mi hija Vania Rodríguez Varela.
CÉSAR ALEJANDRO RODRÍGUEZ SÁNCHEZ
Agradezco a mis padres, las personas más importantes en toda mi vida, que siempre han estado dispuestos para brindarme toda su ayuda, que han hecho todo en la vida para que yo pueda lograr mis metas, por motivarme y darme la mano en los momentos más complicados.
A mis compañeros y amigos, Cesar y Viridiana, que al igual que yo, formamos parte de este equipo de trabajo para la realización de esta tesis, les deseo mucha suerte y todo el éxito posible en la vida.
A todos los profesores que han contribuido a mi formación y que con su ayuda se logró sacar adelante con éxito este trabajo.
A todos y cada uno de ellos, muchas gracias.
MARLEN VIRIDIANA VARELA FLORES
ESIME ZAC Página 3
ÍNDICE GENERAL
OBJETIVO GENERAL ... 8
PLANTEAMIENTO DEL PROBLEMA ... 8
ESTRUCTURA DE LA TESIS ... 10
INTRODUCCIÓN ... 11
Capítulo 1: Descripción de la Grúas Viajeras ... 13
1.1. Antecedentes ... 14
1.2 Clasificación de las grúas ... 15
1.3 Grúa viajera ... 17
1.4 Aplicaciones industriales ... 19
1.5 Normas y especificaciones ... 20
Capítulo 2: Modelo Matemático de la Grúa Viajera ... 22
2.1. Descripción del método de Euler-Lagrange ... 23
2.2 Ecuaciones de movimiento de una grúa viajera ... 24
2.3 Modelo dinámico ... 31
2.4 Aproximación lineal del modelo dinámico ... 35
Capítulo 3: Selección del Sistema de Control Aplicado al Modelo de una Grúa Viajera ... 39
3.1. Sistemas de control ... 40
3.2 Introducción a los controladores PID ... 42
3.3 Especificaciones propuestas en el análisis de la grúa viajera ... 49
3.4 Técnicas de sintonización y selección del controlador PID ... 51
3.4.1 Respuesta del sistema de grúa viajera sin controlador ... 57
3.4.2. Prueba con el controlador proporcional (P)... 58
3.4.3 Prueba con el controlador proporcional integral (PI) ... 60
3.4.4 Prueba con el controlador proporcional derivativo (PD) ... 62
ESIME ZAC Página 4
Capítulo 4: Pruebas y Resultados ... 70
4.1. Región del sistema lineal ... 71
4.2 Simulación del sistema linealizado ... 73
4.3 Simulación del sistema no linealizado... 76
4.4 Pruebas con diferentes masas de carga y diferentes longitudes de cadena ... 76
. Propuesta de i ple e tació ……… 8
4.5.1 Sensores ... 82
4.5.2 Motores ... 82
Capítulo 5: Conclusiones ... 88
Bibliografías ... 90
Anexos ... 92
Anexo A. Diagramas del sistema linealizado y sistema no linealizado ... 92
ESIME ZAC Página 5
ÍNDICE DE FIGURAS
Figura 1.1: Representación esquemática de un puntal de carga ... 14
Figura 1.2: Grúa viajera ... 17
Figura 1.3: Esquema de una grúa puente ... 17
Figura 1.4: Partes elementales del sistema que hacen funcionar una grúa viajera ... 18
Figura 2.1: Diagrama del sistema de una grúa viajera ... 26
Figura 2.2:Diagrama a bloques de una grúa viajera ... 32
Figura 3.1: Sistema de control ... 40
Figura 3.2: Elementos de un sistema de control en lazo abierto ... 41
Figura 3.3: Elementos de un sistema de control en lazo cerrado ... 42
Figura 3.4: Diagrama a bloques de un controlador proporcional ... 43
Figura . : I ple e tació de la acció i tegral realizada co o u reset auto ático ... 47
Figura 3.6: Interpretación geométrica de la acción derivativa como un control predictivo ... 48
Figura 3.7: Modelo en lazo cerrado ... 51
Figura 3.8: Respuesta del sistema retroalimentado ... 52
Figura 3.9: Gráfica obtenida al implementar el método del lazo cerrado ... 53
Figura 3.10: Modelo del lazo abierto ... 53
Figura 3.11: Respuesta del sistema al ser excitado por un escalón ... 54
Figura 3.12: Gráfica obtenida al implementar el método de lazo abierto ... 55
Figura 3.13: Gráfica de la posición del móvil sin controlador implementado ... 57
Figura 3.14: Gráfica de la oscilación de la carga sin controlador implementado ... 58
Figura 3.15: Diagrama a bloques del controlador proporcional (P) implementado al sistema linealizado de la grúa viajera ... 58
Figura 3.16: Gráfica obtenida a la salida del sistema linealizado con el controlador P ... 59
Figura 3.17: Gráfica de la oscilación obtenida con el controlador P ... 59
Figura 3.18: Diagrama a bloques del controlador proporcional integral (PI) implementado al sistema linealizado de la grúa viajera ... 60
Figura 3.19: Gráfica obtenida a la salida del sistema linealizado con el controlador PI ... 61
Figura 3.20: Gráfica de la oscilación obtenida con el controlador PI ... 61
ESIME ZAC Página 6
Figura 3.22: Primera gráfica obtenida a la salida del sistema linealizado con el controlador PD .. 63
Figura 3.23: Primera gráfica de la oscilación obtenida con el controlador PD ... 63
Figura 3.24: Segunda gráfica obtenida a la salida del sistema linealizado con el controlador PD ... 64
Figura 3.25: Segunda gráfica de la oscilación obtenida con el controlador PD ... 64
Figura 3.26: Tercera gráfica obtenida a la salida del sistema linealizado con el controlador PD ... 65
Figura 3.27: Tercera gráfica de la oscilación obtenida con el controlador PD ... 65
Figura 3.28: Cuarta gráfica obtenida a la salida del sistema linealizado con el controlador PD... 66
Figura 3.29: Cuarta gráfica de la oscilación obtenida con el controlador PD ... 66
Figura 3.30: Quinta gráfica obtenida a la salida del sistema linealizado con el controlador PD ... 67
Figura 3.31: Quinta gráfica de la oscilación obtenida con el controlador PD ... 68
Figura 3.32: Diagrama a bloques del controlador proporcional integral derivativo (PID) implementado al sistema linealizado de la grúa viajera ... 68
Figura 3.33: Gráfica obtenida a la salida del sistema linealizado con el controlador PID ... 69
Figura 3.34: Gráfica de la Oscilación obtenida con el controlador PID ... 69
Figura 4.1: Diagrama a bloques de la comparación del sistema lineal y el sistema no lineal ... 71
Figura 4.2: Gráfica comparativa de la región del sistema lineal con el sistema no lineal ... 71
Figura 4.3: Segunda gráfica comparativa de la región del sistema lineal con el sistema no lineal .. 72
Figura 4.4: Tercera gráfica comparativa de la región del sistema lineal con el sistema no lineal .... 72
Figura 4.5: Diagrama a bloques del sistema lineal de la grúa viajera con controlador PD ... 73
Figura 4.6: Gráfica del par fuerza necesario para mover el sistema de la grúa viajera ... 73
Figura 4.7: Gráfica de la trayectoria que sigue el sistema de la grúa viajera ... 74
Figura 4.8: Gráfica de la velocidad del móvil de la grúa viajera ... 74
Figura 4.9: Gráfica de la oscilación provocada por la carga de la grúa viajera ... 75
Figura 4.10: Error de la retroalimentación del sistema de la grúa viajera ... 76
Figura 4.11: Controlador PD funcionando dentro del rango de pruebas experimentales ... 77
Figura 4.12: Gráfica de la oscilación con una carga nominal de 0.1 toneladas ... 78
Figura 4.13: Gráfica de la oscilación con carga nominal de 0.125 toneladas ... 78
Figura 4.14: Gráfica de la oscilación con una carga nominal de 0.16 toneladas ... 79
Figura 4.15: Gráfica de la oscilación con una carga nominal de 0.2 toneladas ... 79
Figura 4.16: Gráfica de la oscilación con una carga nominal de 0.25 toneladas ... 80
ESIME ZAC Página 7
Figura 4.18: Gráfica de la oscilación con una carga nominal de 0.32 toneladas ... 81
Figura 4.19: Sensor fin de carrera Allen-Bradley... 82
Figura 4.20: Sensor fin de carrera FR501 ... 82
Figura 4.21: Sensor capacitivo LAMBAO ... 83
Figura 4.22: Sensor Capacitivo SICK ... 83
Figura 4.23: Sensor Capacitivo HC-SR04 ... 84
Figura 4.24 Sensor capacitivo Allen-Bradley ... 84
Figura 4.25: Potenciómetro SENSING SL ... 85
Figura 4.26: Transductor de posición angular SENSING SL ... 85
Figura 4.27: Polipasto de cadena DC-Pro ... 86
Figura 4.28: MOTOX: GKFSN06 Electrónico ... 87
ÍNDICE DE TABLAS
Tabla 1.1: Listado de cargas nominales válidas para grúas viajeras ... 20Tabla 1.2: Valores medios de las aceleraciones y desaceleraciones para una grúa viajera ... 21
Tabla 3.1:Especificaciones del carro móvil de la grúa viajera ... 49
Tabla 3.2: Datos técnicos de la viga de la grúa viajera ... 50
Tabla 3.3: Coeficientes de fricción ... 50
Tabla 3.4: Datos técnicos de la grúa viajera implementados en las simulaciones ... 50
Tabla 3.5: Reglas de sintonización para un controlador PID por el método de lazo cerrado ... 52
Tabla 3.6: Reglas de sintonización para un controlador PID por el método de lazo abierto ... 54
Tabla 3.7: Efecto de las ganancias en los controladores ... 56
Tabla 3.8: Sintonización del controlador proporcional derivativo ... 62
Tabla 3.9: Valores implementados en el controlador PD ... 67
Tabla 4.1: Valores experimentales de masas y longitudes de cadena ... 77
Tabla 4.2: Especificaciones técnicas del Polipasto DC-Pro ... 86
ESIME ZAC Página 8
OBJETIVO GENERAL.
Proponer y diseñar, un controlador para la reducción de oscilaciones mediante el análisis del modelo dinámico de grúas viajeras, realizando simulaciones con software especializado que permita interpretar los resultados obtenidos.
PLANTEAMIENTO DEL PROBLEMA.
El proceso de trabajo de una grúa viajera, consiste en desplazar una cargadel lugar donde se encuentra hasta un nuevo sitio donde se desee colocar, impidiendo que el móvil no sobrepase la longitud máxima de la viga por donde se está desplazando.
Al realizar este proceso, el movimiento del móvil produce numerosas oscilaciones sobre la carga, las cuales resultan un problema que debe ser eliminado o minimizado al máximo, tomando en cuenta también que el móvil traslade la carga a la posición requerida.
Algunos de los problemas que destacan con la presencia de oscilaciones en las grúas viajera, son los siguientes:
Daños a la estructura de la grúa: El movimiento brusco de las oscilaciones puede hacer que el material pesado se impacte sobre la estructura dañándola de manera grave.
Daños del material que se está cargando: Al dañar la estructura también se daña el material que se está cargando debido al golpe, además, debido a las oscilaciones se puede romper la cadena que lo sostiene cayendo al piso y dañándolo de igual manera.
ESIME ZAC Página 9 Daños al motor que se encarga del desplazamiento del móvil: Las oscilaciones constantes y de magnitud grande pueden provocar daños en la estructura del motor, esto debido a que su rotor se moverá bruscamente de acuerdo a la posición en que las oscilaciones ubique a la carga causando daños en la estructura del motor, por eso es necesario reducir las oscilaciones con el fin de protegerlo.
Debido a que en la industria no se utiliza un sistema tal que corrija este problema, se optó por proponer una solución a este, por medio de análisis y experimentos sobre el modelo, con el apoyo de software, capaz de brindar otra perspectiva como lo son las simulaciones de lo que se está realizando.
El modelo dinámico, nos describe el comportamiento de una grúa viajera sin considerar oscilaciones y sin control.
El controlador a utilizar, deberá regular la posición del móvil de la grúa para lograr eliminar las oscilaciones producidas,corrigiendo el error producido al comparar la posición establecida con la posición que lleva en un momento durante su recorrido, con el fin de llegar a su destino con la mínima presencia de oscilaciones, produciendo un proceso continuo y sin ninguna perturbación en la carga.
ESIME ZAC Página 10
ESTRUCTURA DE LA TESIS.
En el capítulo uno, se describen todos los aspectos relacionados con las grúas viajeras, conceptos, datos técnicos como medidas, materiales, fricciones, capacidades de carga, velocidades y las normas que rigen todos estos aspectos, proponiendo el tipo de grúa a utilizar en el análisis, junto con todos sus parámetros correspondientes que la describen.
En el capítulo dos, se realiza el análisis del modelo dinámico que describe el comportamiento de la grúa viajera, utilizando para esto, el método de Euler-Lagrange, tomado en cuenta todos los aspectos descritos en el capítulo uno. El modelo en general, se describe como completo, ya que considera la fricción, que en muchos análisis que se realizan no es tomada en cuenta. El sistema analizado corresponde a un sistema no lineal, sin embargo, se realiza todo lo correspondiente para pasar al sistema a su forma linealizada, para más adelante realizar experimentos y comparaciones con ambos.
El capítulo tres, describe los aspectos correspondientes al controlador, tipos y formas de sintonizarlos, se presentan las propuestas de aplicación sobre el modelo dinámico, así como los resultados que se obtienen al emplear cada configuración de PID, mencionando al final cual logra cumplir con el objetivo propuesto.
El capítulo cuatro, hace énfasis en el tipo de controlador que ofrece los mejores resultados. Se presentan todos los experimentos realizados con el controlador actuando sobre el modelo matemático, tanto en su forma linealizada como en la no linealizada, cambiando los parámetros utilizados y ofreciendo puntos de vista sobre la forma en que actúa sobre cada aspecto.
ESIME ZAC Página 11
INTRODUCCIÓN.
En la industria, los sistemas de control automático, son dispositivos utilizados para llevar a cabo el control de las variables que actúan dentro de algunos de sus procesos. Estos sistemas permiten que las variables controladas permanezcan en un punto de referencia, o bien, en un cierto rango aceptable alrededor de dicho punto. Esto, con la finalidad de que los procesos industriales sean más eficientes dentro de todo su proceso de producción.
Se puede considerar entonces, que un sistema de control es aquel sistema que ante unos objetivos determinados responde con una serie de acciones para poder cumplirlos.
Tomando en cuenta lo anterior, se optó por elegir una actividad dentro de la industria, la cual al estar sujeta a perturbaciones externas, no fuera capaz de solucionarlas por sí misma, esta actividad es, el uso de grúas viajeras, como medio para realizar la actividad de trasladar materiales de gran tamaño y peso de un lugar, es habitualmente indispensable y necesario. A pesar de su funcionalidad y utilidad, las grúas viajeras utilizadas en la industria, no cuentan con la posibilidad de corregir y realizar acciones en contrade las perturbaciones que actúan en todo momento sobre ellas. En particular cuentan con un problema que causa mayor relevancia, las oscilaciones que se produce en la carga que llevan al estar desplazándola de un sitio a otro, debido a que en la grúas viajeras no se implementa un sistema de control que realice dichas acciones, ya que el manejo y control de estas estructuras está a cargo de personas capacitadas, que se encargan de lidiar y corregir todos los problemas que estas conllevan.
Al elegir esta situación, se lleva a cabo una investigación sobre los sistemas de control, en este caso, un control PID que logre corregir el problema al que está expuesta la actividad de la grúa viajera, indicando que configuración es la más indicada para poderla aplicar sobre el modelo dinámico que describe al sistema, así como la forma de sintonizarlo.
ESIME ZAC Página 12
simples de control.Sin embargo, se menciona la opción de tomar la decisión de no implementar los controladores PIDsi no es necesario, ya que, un controlador como el PI o el PDpuede ofrecer unarespuesta satisfactoria al ser aplicado a nuestro sistema, el controlador puede mantenerse lo más sencillo posible.
Para la experimentación y muestra de los resultados se hace uso de softwarede análisis como Matlaben conjunto con Simulink, estos nos brindan un panorama más amplio de lo que se está realizando y por tanto, permiten tener una idea más clara de lo que se va a llevar a cabo, como la configuración del controlador que se va a elegir, el cual será el que ofrezca los mejores resultados de acuerdo a como actúa en conjunto con el modelo dinámico de la grúa viajera.
ESIME ZAC Página 13
CAPÍTULO 1:
Descripción de la
Grúa Viajera
ESIME ZAC Página 14
1.1
Antecedentes
Las grúas son sistemas mecánicos que permiten y facilitan movilizar, transportar o levantar objetos pesados y de grandes dimensiones de un lugar a otro. Son equipos de alto peso normalmente cuentan con mecanismos simples para generar una ventaja mecánica y así lograr su trabajo.
Los orígenes de esta máquina remontan en la antigua Grecia, accionadas por hombres o animales de carga, como burros. Estas grúas eran utilizadas para la construcción de edificios altos.Las primeras grúas se construyeron de madera, pero con la llegada de la revoluciónindustrial, el hierro fundido y el acero, asumieron el control.
En la antigua edad media las grúas, o anteriormente conocidas como puntales de cargaeran muy utilizadas en los barcos mercantes, cuyos tripulantes se encargaban de su manipulación, en un proceso de carga y descarga constante. Sin embargo, con el paso del tiempo el puntal tuvo que ser sustituido, en especial porque tenía como mayor desventaja que necesitaba ser operado por un alto número de individuos, lo cual retardaba el proceso de descarga.Dicho puntal de carga, consistía en una pieza cilíndrica compuesta por dos partes: una inferior que presentaba una firmeza inamovible, llamada coz y una parte superior en la que se encontraba el amante (cable que sostiene la carga) que junto con el amantillo (Cable del puntal) se encargaban de inclinar el puntal de carga mientras el otro cablesostenía el peso de toda la carga ver Figura1.1
ESIME ZAC Página 15
Actualmente, las grúas utilizan motores de combustión interna o sistemas de motores eléctricos e hidráulicos, y, así proporcionar una capacidad de elevación mucho mayor que anteriormente era imposible alcanzar, aunque algunos tipos de grúas manuales todavía se utilizan donde es poco rentable disponer de energía.
1.2 Clasificación de la grúas.
Existe un gran número de grúas de diversas formas y tamaños, cada una adaptada a un uso específico. Por lo mismo existen distintas formas de clasificarlas.
Una de esas clasificaciones es de acuerdo a los modos en que transportan la carga de manera horizontal, por lo que encontramos los siguientes grupos (Towne, 1883).
Giratorias
Son aquellas grúas que rotan sobre su mismo eje, es decir que realizan movimientos circulares para poder colocarse en múltiples posiciones y así poder trasportar la carga de un lugar a otro con mayor facilidad.
Grúas de Oscilación.
Grúas de Brazo.
Grúas de Columna.
Grúas de Soporte.
Grúas Torre.
Grúas Andantes.
Rectilíneas
Son aquellas grúas que operan de manera lineal es decir que solo operan en línea recta, sus movimientos solo son a direcciones específicas.
Grúas Puente.
Grúas Tranvía.
Grúas Viajeras.
ESIME ZAC Página 16
Por otro lado el Comité de Normalización de Petróleos Mexicanos y Organismos Subsidiarios en uno de sus documentos “Equipo de Maniobra de Grúas Viajeras, Polipastos
y Malacates” NRF-183-PEMEX-2007 (PEMEX, 2007), las grúas pueden ser clasificadas de la siguiente manera:
Por su accionamiento.
Manual: El puente, el polipasto y el carro son accionados con rueda y cadena.
Motorizada: El puente, el polipasto y el carro son accionados con motor eléctrico.
Mixta: El puente, el polipasto y el cano son accionados con rueda de mando o con motor eléctrico o neumático indistintamente.
Por su tipo de servicio.
Clase A: Servicio poco Frecuente.
Clase B: Servicio Ligero.
Clase C: Servicio Moderado.
Clase D: Servicio Pesado.
Por su construcción
Mono-puente.
Bi-puente.
Por su forma de soporte
Apoyadas: Las ruedas de translación de la grúa se apoyan sobre la trabe carril.
Suspendidas: Las ruedas de translación de la grúa se apoyan sobre la cara superior del patín inferior de la trabe canil.
ESIME ZAC Página 17
1.3
Grúa viajera o grúa puente.
Los diferentes arreglos, capacidades y dimensiones de las grúas que existen en el mercado son el resultado de los requerimientos observados en las diversas áreas de aplicación. A nivel industrial se utiliza ampliamente el puente grúa Figura 1.2 y Figura 1.3, este tipo de grúas regularmente se caracterizan por estar suspendidas a una altura por encima de los 15 mts., su capacidad de soporte es muy elevado ya que puede trabajar con materiales que pesan aproximadamente 40 toneladas, manejan voltajes mayores de 300 Volts y operan por medio de radio control (Frecuencia de amplitud modulada).
Sin embargo al igual que todo, tiene ciertas desventajas, una de ellas es que están limitadas a trasladarse por una sola vía, por lo que su movimiento suele ser muy lento pero su mayor inconveniente es el fenómeno de las oscilaciones, lo cual provoca que el proceso de carga/descarga se tornen lentos debido a las afectaciones que sufre el sistema en el transcurso de su trabajo.
Figura. 1.3:Esquema de unagrúa puente.
ESIME ZAC Página 18
Este tipo de grúa consta de tres partes principalesFigura 1.4:
Fig.1.4 Partes elementales del sistema que hacen funcionar una grúa viajera
■ PUENTE:
Es todo el mecanismo de la grúa, es donde se realiza el movimiento de traslación, es decir que el puente es donde el carro se mueve de izquierda a derecha. Además de que debe contar con un freno, operado por un pedal de piso desde cabina de operación o un freno eléctrico operado por un botón de piso. El propósito de los frenos es que a la hora de que el carro este en movimiento se situé en la posición deseada.
■ CARRO:
Es el mecanismo que sostiene sobre si un polipasto (mecanismo para levantar cargas o moverlas), teniendo movimientos de adentro a hacia afuera y viceversa. La forma de operación del carro consiste en situarlo exactamente sobre la carga antes de continuar con el izaje, de no ser así la carga sufrirá perturbaciones provocando que la carga oscile de un lado a otro.
■ IZAJE O GANCHO:
ESIME ZAC Página 19
1.4
Aplicaciones industriales.
Las grúas viajeras actualmente han alcanzado un excelente grado de perfeccionamiento y eficiencia ya que cumplen satisfactoriamente con los requerimientos de manipulación de equipos y accesorios, es por ello que cada día se utilizan en mayor cantidad, tanto en la industria como en otros campos.
Retomando nuevamente el documento de PEMEX, NRF-183-PEMEX-2007 (PEMEX, 2007), donde las aplicaciones de las grúas viajeras son catalogadas de acuerdo su clase:
Clase A (Poco Frecuenté): Cubre las grúas usadas en instalaciones tales como: cuartos de potencia, servicios públicos, cuartos de máquinas y estaciones eléctricas en donde se necesita manejar con precisión la carga a velocidades bajas con largos periodos inactivos. La carga nominal se utiliza sólo en la etapa de instalación inicial del equipo y para el mantenimiento ocasional.
Clase B (Ligero): Cubre las grúas para talleres de reparaciones, operaciones de ensamble ligero, edificios de servicio, almacenes ligeros entre otros, donde los requisitos del servicio son ligeros y la velocidad lenta.
Clase C (Moderado): Cubre las grúas usadas en talleres de maquinaria o fábricas de papel, entre otros, donde los requisitos de servicio son moderados.
ESIME ZAC Página 20
1.5
Normas y Especificaciones.
El diseño y construcción de grúas dependen de las especificaciones del cliente, de la persona o industria que va a usar la grúa, por ello se deben tomar en cuenta los siguientes detalles que caracterizan una grúa:
1) Capacidad de elevación 2) Distancia de la viga 3) Altura de izaje
4) Velocidad translación de carro 5) Tipo y tiempo de servicio.
6) Lugar de instalación (cubierto o intemperie).
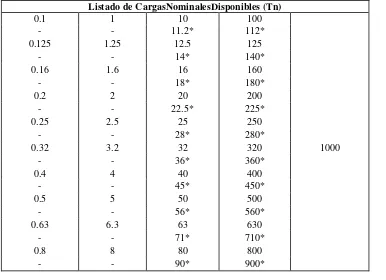
[image:21.612.121.507.441.721.2]Debido a que no se hallaron normas mexicanas con especificaciones técnicas para grúas viajeras, se utilizaron las normas españolas UNE 58-109-86 y UNE 76-201-88. La Tabla 1.1 presenta el peso de cargas nominalespara aparatos de elevación.(Norma EspañolaUNE 58-109-86).
Tabla 1.1: Listado de cargas nominales válidas para grúas viajeras.
Listado de CargasNominalesDisponibles (Tn)
0.1 1 10 100
- - 11.2* 112*
0.125 1.25 12.5 125
- - 14* 140*
0.16 1.6 16 160
- - 18* 180*
0.2 2 20 200
- - 22.5* 225*
0.25 2.5 25 250
- - 28* 280*
0.32 3.2 32 320 1000
- - 36* 360*
0.4 4 40 400
- - 45* 450*
0.5 5 50 500
- - 56* 560*
0.63 6.3 63 630
- - 71* 710*
0.8 8 80 800
ESIME ZAC Página 21
Un factor importante a la hora de diseñar la estructura, es la aceleración con la que se van a realizar los movimientos del puente grúa.(Norma Española UNE 76-201-88, 1988).
[image:22.612.110.507.259.564.2]Al desconocerse con exactitud y precisión el valor de estas aceleraciones, se ha recurrido a la Tabla 1.2. En ella se recogen los valores medios de las aceleraciones y desaceleraciones para tres condiciones de explotación.
Tabla 1.2: Valores medios de las aceleraciones y desaceleraciones para una grúa viajera.
Velocidad
(m/s)
Velocidad lenta y media con gran
recorrido
Velocidad media y rápida (aplicaciones
corrientes)
Velocidad rápida con fuertes aceleraciones Duración de la aceleración (s) Aceleración media (m/s2)
Duración de la aceleración (s) Aceleración media (m/s2)
Duración de la aceleración (s) Aceleración media (m/s2)
4.00 - - 8.0 0.53 6.C 0,67
3.15 - - 7,1 0,44 5,4 0,58
2.50 - - 6,3 0,39 4,8 0,52
2.00 9,1 0,22 5,6 0,35 4,2 0,47
1.60 8,3 0,19 5,0 3.52 3,7 0,45
1.00 6,6 0,15 4,0 0,25 3,0 0,33
0.63 5,2 0,12 3,2 0,19 - -
0.40 4,1 0,098 2,5 0,16 - -
0.25 3,2 0,078 - - - -
0.16 2,5 0,064 - - - -
ESIME ZAC Página 22
CAPÍTULO 2:
Modelo Matemático
de la Grúa Viajera
A lo largo de la historia el ser humano ha tenido la necesidad de comprender ciertos fenómenos, y, para ello han hecho uso de las matemáticas las cuales han sido un elemento importante para el desarrollo de la ingeniería tanto clásica como moderna.
Por ello,en esta sección se describe el modelo dinámico de una grúa de dos grados de libertad, el cual consta en expresar en una serie de ecuaciones, las fuerzas o pares requeridos por los actuadores para lograr el movimiento deseado en términos de posición, velocidad y aceleración a lo largo de una trayectoria.
ESIME ZAC Página 23
2.1 Descripción del método de Euler-LaGrange.
Para el desarrollo del modelo matemático de la grúa, es necesaria la implementación del método de Euler-LaGrange. Este método se basa en los conceptos de coordenadas generalizadas y de una función de tipo escalar conocida como lagrangiano, conjuntamente de la aplicación de las leyes de Newton. (Ogata, 1992) (Saha, 2010).
Las coordenadas generalizadas en un sistema, son un conjunto de coordenadas independientes que se necesitan para describir completamente el movimiento del sistema. El número de coordenadas generalizadas de un sistema mecánico, será igual al número de grados de libertad (Ogata, 1992) (Craig, J. 1989) que en este caso serán dos, ya que el
sistema tendrá movimientos sobre el eje “x” como en el eje “θ”.
Por otro lado, el lagrangianoL define una diferencia entre la energía cinética Ecy la
energía potencial Ep de un cuerpo en movimiento en un punto dado de su trayectoria,
entonces el lagrangiano viene dado por la ecuación 2.1:
L
Ec
Ep
(2.1)A su vez, el principio de Hamilton ecuación 2.2, está definido como: la integral temporal del lagrangiano sobre una trayectoria; donde a cada trayectoria le corresponde un valor numérico de acción. (Torres Rodríguez, 2010)
2 1
,
t
i i t
I
L q q dt
(2.2)Dónde:
I: Principio de Hamilton
,
i i
q q
: Coordenadas Generalizadas.ESIME ZAC Página 24
Las ecuaciones diferenciales que describen las posibles trayectorias de un sistema, requieren que la acción esté en un valor mínimo o máximo, con el objeto que la diferencial funcional de la acción se anule (Ogata. 1992):
0
S
(2.3)
Dicha condición da origen a las ecuaciones de Euler-Lagrange, la cual aplicada al método Iagrangiano proporciona las ecuaciones de movimiento para cualquier sistema:
0
i i
d
L
L
dt
q
q
(2.4)Donde:
i
(1,2,..., )
n
La ecuación de Euler-Lagrange minimiza la acción reproduciendo justamente la ecuación de movimiento de Newton (Cardona. Clos, 2000).
2.2 Ecuaciones de movimiento de una grúa viajera.
Antes de realizar el control de cualquier sistema, es importante hacer primeramente un análisis y estudio del comportamiento mecánico o físico del sistema, ya que este, proporcionara la información necesaria de todas las posibles variables y constantes requeridas para que la grúa trabaje de manera real, lo cual permitirá evaluar vibraciones, sobre voltajes, etc. y así, posteriormente se aplique la etapa de control donde más sea requerido.
Para poder realizar el estudio del comportamiento dinámico que describe el sistema, es necesario, establecer las siguientes condiciones, las cuales harán reducir la complejidad de las ecuaciones, y será más fácil su estudio.
1. El momento inercial de la carga es ignorado; es decir es igual a cero.
2. La carga es considerada como una masa puntual. 3. El cable es considerado rígido y con masa despreciable.
ESIME ZAC Página 25
Usualmente el momento inercial de una carga no debería ser ignorado ya que al interactuar con su aceleración angular genera dicho fenómeno, el cual tiene grandes repercusiones en el comportamiento general del sistema. Sin embargo, dado que el objetivo principal de este trabajo es atenuar las oscilaciones de la carga mediante trayectorias de seguimiento suficientemente suaves, entonces la consideración inercial igual a cero es totalmente permitida (RL. Norton, 1990).
Por otra lado, la carga puede considerarse como masa puntual siempre y cuando dicha carga tenga una distribución homogénea y simétrica de la masa además que el punto de levante sea el adecuado, es decir que este alineado con el eje vertical del centro de gravedad de la carga y ligeramente por encima de éste (RL. Norton, 1990).
De la misma manera, la consideración de un cable rígido con masa despreciable es válido, debido a que la masa tanto de la carga como del mismo carro de la grúa, son mucho muy grandes en consideración a la masa presentada por el cable. Considerar un cable rígido es una característica de algunos materiales usados a menudo dentro de las grúas industriales por lo que también este supuesto es completamente valido.
Cualquier otro fenómeno que pudiese provocar perturbaciones fuera del plano vertical no será considerado dentro del análisis; por lo que podemos dar inicio al desarrollo matemático de una grúa real bajo los supuestos anteriores.
La grúa viajera es un sistema electromecánico, diseñado con dos actuadores. Uno de ellos se encarga de controlar la posición del carro sobre la dirección horizontal (eje x), mientras que el segundo es responsable del desplazamiento del cable, es decir el encargado de que la carga ascienda o descienda verticalmente (eje y). Tales actuadores son considerados dos grados de libertad totalmente actuados.
ESIME ZAC Página 26
Entonces, debido a que en el sistema existe mayor número de grados de libertad que actuadores, este sistema se considera sub-actuado, es decir que carece de un actuador en al menos uno de sus grados de libertad. A pesar de la existencia de tres grados de libertad, solo se consideraran dos de ellos, ya que el trabajo está limitado a solo dos grados de libertad: el del carro sobre el eje x, y el ángulo θ.
En la figura 2.1 se muestra el diagrama de una grúa viajera,el cual será de suma importancia para realizar el análisis del movimiento que tendrá la grúa.
Figura 2.1: Diagrama del sistema de una grúa viajera
Primero se darán a conocer las variables y parámetros del sistema, los cuales permitirán obtener las ecuaciones de movimiento en la mecánica de Lagrange de la grúa:
x : Posición del Carro.
ẋ : Velocidad del Carro.
x
: Aceleracion del Carro.l : Longitud del Cable.
θ : Angulo del Cable Respecto al eje Vertical.
θ : Velocidad Angular.
θ : Aceleracion Angular.
u : Fuerza Aplicada al Carro.
m : Masa de la Carga.
ESIME ZAC Página 27
El sistema tendrá dos grados de libertad, entonces existen dos coordenadas
generalizadas: “x”y “θ”.
Para poder usar la ecuación (2.1), es obligatorio obtener tanto la energía cinética como la energía potencial del sistema.
Para la obtención de la energía cinética es necesario considerar la energía que posee
el carro de masa “m” en movimiento denominada “Ecg”, la cual es una función de la
derivada de la posición “x” esto es:
1 2 2
g g
Ec M x (2.5)
Por otro lado, también se debe obtener la energía cinética que posee el péndulo, lo cual viene dado de la siguiente manera:
1 ( 2 2) 2
p x y
Ec m p p (2.6)
Para determinar la posición del péndulo (px y py), se hace uso de la longitud del
cable “l” así como su ángulo “θ”
sin
cos
x y
p
x l
p
l
(2.7)Ahora corresponde encontrar las velocidades (px y py), para ello tenemos que derivar
las expresiones presentadas en la ecuación (2.7).
(
sin )
cos
( cos )
sin
x
y
d
p
x l
x l
dt
d
p
l
l
dt
(2.8)ESIME ZAC Página 28
2 2 2 2 2
2 2 2 2
2 cos cos
sin x
y
p x l x l
p l
(2.9)
Entonces:
2 2 2 2 2 2 2
2 2 2 2 2
(
)
2
cos
(cos
sin )
(
)
2
cos
x y
x y
p
p
x
l x
l
p
p
x
l x
l
(2.10)Por lo que sustituyendo la ecuación (2.10) en la ecuación (2.6), la energía cinética del péndulo (Ecp) está dada por:
1 ( 2 2 cos 2 2) 2
p
Ec m x lx l (2.11)
Finalmente la energía total del sistema seria la suma de la ecuación (2.5) y la ecuación (2.11), es decir la suma de la energía cinética del carro más la energía cinética del péndulo.
1 2 1 2 2 2
( 2 cos )
2 2
g p
g
Ec Ec Ec
Ec M x m x lx
l
(2.12)
Por otro lado la energía potencial se define como la energía almacenada debida a la posición del mismo, cuando se trata de un campo potencial debido a la gravedad terrestre. (Bimal, K. 2002)
En este caso la energía potencial del sistema, es únicamente a causa de la gravedad, entonces al igual que como se hizo con la energía cinética, deberá de considerarse la energía almacenada tanto en el carro como en el péndulo.
ESIME ZAC Página 29
En el caso del péndulo, este si se ve afectado por la fuerza de gravedad ya que posee una componente vertical, esto es:
( )
sin
(1 cos )
y
Ep
mgl p
Ep
mgl
mgl
(2.13)Ahora sustituyendo los resultados de las ecuaciones (2.12) y (2.13) en (2.1), por fin se tiene el lagrangiano:
1( ) 2 1 2 2 cos cos
2 g 2
L M m x ml mlx mgl (2.14)
Aplicando las ecuaciones de Euler-Lagrange (ecuación (2.4)) a la ecuación (2.14)
1
:
:
0
d
L
L
x
u
dt
x
x
d
L
L
dt
(2.15)Donde u1es la fuerza de control, es decir, la fuerza que deben aplicar los motores
para que la grúa pueda moverse.
De esta manera, desarrollando L x
de la coordenada generalizada “x” de la
ecuación (2.15), se obtiene:
2 2
1 1
( ) ( ) cos ( )
2 2
( ) cos
g
g
L
M x m x ml x
x x x x
M m x ml
(2.16)
Del resultado de la ecuación (2.16), si se realiza la derivada con respecto al tiempo:
( g ) cos 2
d L
M m x ml ml sen
dt x
ESIME ZAC Página 30
Cabe señalar que L
x
= 0, ya que el lagrangiano no depende nunca de la variable x
Ahora es turno de desarrollar L
sobre la coordenada generalizada “
”, de laecuación (2.15).
2 2
2 1
2 cos ( ) ( ) 2
cos
L
m lx l
ml mlx
(2.18)Obteniendo la derivada con respecto al tiempo del resultado de la ecuación (2.18), resulta lo siguiente:
2
2 ( ) ( cos )
( sin cos )
d L d d
ml ml x
dt dt dt
ml x x ml
(2.19)Asimismo se obtiene L
, esto es:
(cos ) (cos )
sin sin L mlx mgl mlx mgl
(2.20)Por lo tanto las ecuaciones que describen el movimiento del sistema son:
2
1 2
( ) cos sin
cos g sin 0
g
M m x ml ml u
mlx ml m l
(2.21)
Debido a que se desea que el sistema actué lo más real posible, es decir que su funcionamiento sea lo más parecido a la realidad, entonces se incluyen las fuerzas de
fricción para el carro
B x
x , y para el pénduloB
p
. Tales fuerzas de fricción dependen de laESIME ZAC Página 31
objetos en movimiento a través del aire, con aceleraciones muy lentas sobre superficies lubricadas (Nearing, 2008). Otro factor importante por el que se usa este tipo de fricción, se debe a que la velocidad se retroalimenta con el sistema, lo cual no sucede con la fricción seca.
Cabe recordar que la fuerza de fricción se da a partir del contacto entre dos cuerpos, por ende, será aquella que se opondrá a la fuerza de desplazamiento, es decir, se encargara que el movimiento de la grúa tenga un límite y su deslizamiento no marche a infinito.
2
1 2
(
)
cos
sin
g sin
cos
0
g x
p
M
m x ml
ml
B x u
ml
m l
mlx
B
(2.22)Entonces las ecuaciones que describirán el comportamiento dinámico de la grúa viajera para este trabajo, serán las ecuaciones (2.22) las cuales serán el núcleo para desarrollar el control del sistema.
2.3 Modelo dinámico.
La dinámica se ocupa de la relación entre las fuerzas pares que se aplican a las estructuras mecánicas y que también dependen de las magnitudes de las masas y su distribución. Por lo que el modelo dinámico de una grúa tiene por objeto conocer la relación entre las fuerzas aplicadas por los motores (F) con las posiciones (q), velocidades (q) y aceleraciones (q). (Khalil W. 2002).
El Modelo Dinámico Inverso (MDI) de un sistema de n grados de libertad, según el método de Euler-Lagrange se expresa mediante la ecuación (2.23):
ESIME ZAC Página 32
Dónde:
M: Matriz de inercias.
C: Matriz de fuerzas centrifugas (Coriolis).
G: Gravedad.
F: Fuerzas Externas.
[image:33.612.230.411.277.340.2]En la ecuación (2.23) puede verse como un sistema dinámico cuya entrada es el vector Fy sus salidas son los vectores
q
y q. Estopuede esquematizarse mediante el diagrama de la figura 2.2.Figura 2.2: Diagrama a bloques de una grúa viajera.
Ahora se deben de ordenar las ecuaciones (2.22) de la forma (2.23), esto es:
1 2
sin
cos 0
0
cos sin 0
x g
p
B ml
M m ml x x u
B
ml ml mgl
(2.24)
Siguiendo la metodología de Vivas (Vivas A. 2010) se analiza el Modelo Dinámico Directo (MDD) que expresa las aceleraciones en función de las posiciones, velocidades y fuerzas que actúan sobre la grúa. Tales aceleraciones vienen dadas por q, lo cual exige usar el MDD, para ello simplemente hay que despejar q de la ecuación (2.23), sin embargo antes de ello hay que comprobar que M q( )sea una matriz no singular, es decir que su determinante sea diferente de cero, lo cual se puede afirmar en el resultado de la ecuación (2.27), por tanto el MDD se expresa de la siguiente manera:
ESIME ZAC Página 33
Dónde:
1
1
[ ]
det[ ]
T
M
cof M
M
(2.26)
Calcular el det[M], perteneciente a la ecuación (2.24):
2 2 2 2
2 2 2 2 2 2
2 2
det[ ] ( ) cos
(1 sin )
( sin )
g
g
g
M ml M m m l
ml M m l m l ml M m
(2.27)
Ahora toca calcular
cof M
[ ]
T2 cos [ ] cos T g ml ml cof M
ml M m
(2.28)
Por lo que sustituyendo los resultados de las ecuaciones (2.27) y (2.28) en (2.26), resultara lo siguiente:
2 1 2 2 cos 1 cos
( g sin ) g
ml ml
M
ml M m
ml M m
(2.29)
Con el resultado anterior, se podrá resolver paso por paso la ecuación (2.25),
primero se resolverá
M Cq
1
2 1
2 2
2 2 3
2 2
2 2
2 2 3 2
2 2
cos sin
1
cos 0
( sin )
sin cos
1
cos sin cos ( )
( sin )
1
( sin )
x
g p
g
x p
x p g
g
x g
ml ml B ml x
M Cq
ml M m B
ml M m
B ml m l B ml x
B ml m l B M m
ml M m
B ml x m l
ml M m
2 2 2
sin cos
cos sin cos ( )
p
x p g
B ml
B mlx m l B M m
ESIME ZAC Página 34
Ahora M G1
2 1 2 2 2 2 2 2 cos 0 1 cos sin
( sin )
sin cos 1
( ) sin
( sin )
g g g g ml ml M G
ml M m mgl
ml M m
m l g
M m mgl
ml M m
(2.31)
Por ultimo M F1
2 1 1 2 2 2 2 1 2 2 1 cos 1 cos 0
( sin )
1
( sin ) cos
g g
g
ml ml u
M F
ml M m
ml M m
m l u
ml M m mlu
(2.32)
Finalmente sustituyendo los resultados de las ecuaciones (2.30), (2.31) y (2.32) en (2.25) se podrá obtener las dos incógnitas necesarias x y .
2 2
1
2 2 2
1
( sin cos sin cos )
1
( )
( sin ) ( cos sin cos ( ) sin cos )
x p
p g
g x g
ml B lx ml B mlg lu
x
q B M m
ml M m ml B x ml M m g u
ml (2.33)
Realizando las operaciones debidas sobre la ecuación (2.33) x y resultan:
2 2 1 2 2 1 2 1
sin cos sin cos
( sin )
( )
1
cos sin cos ( ) sin cos
( sin )
x p
g
p g
x g
g
x B lx ml B mlg lu
l M m
B M m
B x ml M m g u
l M m ml
(2.34)
Una vez que todas las variables están definidas, se procede a realizar el siguiente cambio de variable, sobre la ecuación (2.34)
ESIME ZAC Página 35
Entonces:
2 2
2 4 3 4 3 3 3 1
2 3
4 2
2 3 4 3 3 3 1 3
2 3
1
sin cos sin cos ( sin )
( )
1
cos sin cos ( ) sin cos
( sin )
x p
g
p g
x g
g
x B lx ml x x B x x mlg x x lu
l M m x
B x M m
B x x mlx x x M m g x u x
l M m x ml
(2.36)
Las ecuaciones (2.36) describen el MDD (Modelo Dinámico Directo) de una grúa viajera, cabe señalar que dichas ecuaciones representan la dinámica de un sistema no-lineal, ya que contiene términos cuadráticos, senoidales y cosenoidales.
2.4 Aproximación lineal del modelo dinámico.
La linealización es un procedimiento que permite aproximar un modelo no lineal, por otro que si lo sea y que cumpla las propiedades de los sistemas lineales, en particular el principio de superposición; ya que para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cadaentrada a la vez y sumando los resultados.(KatsuhikoOgata. 2003).
ESIME ZAC Página 36
El procedimiento de linealización que se presenta aquí se basa en el desarrollo de la función no lineal en series de Taylor alrededor del punto de operación y la retención sólo del término lineal. Debido a que no se consideran los términos de orden superior del desarrollo en serie de Taylor, estos términos no considerados deben ser suficientemente pequeños: es decir, las variables sólo se desvían ligeramente de la condición de operación.(KatsuhikoOgata. 2003).
Debido a que se desea que el sistema quede representado en espacio de estados, es decir x t( )Ax t( )Bu t( ) , para ello es necesario encontrar las matrices jacobianas, las cuales vienen dadas por las derivadas parciales de primer orden de una función
Donde: (X,U) f A x (X,U) f B u
Ahora bien si x f x( ) , entonces derivando cada función de (2.35) resulta:
1 2 2 3 4 4 x x x x x x x
Entonces 1 2 2 3 4 4 ( ) ( ) ( ) ( ) ( ) f x x f x xf x x
f x x f x (2.37)
Si se sustituye los resultados de x y presentados en la ecuación (2.36) sobrela ecuaciones anterior (2.37):
2 2
4 3
2 4 3 3 3 1
2 2 2 2 2
3 3 3 3 3
4 2
4 3
2 3 4 3 3
2 2 2 2
3 3 3
cos
sin sin cos
sin sin ( sin ) sin sin
( )
( ) ( ) sin
cos sin cos
( sin ) sin ( sin ) ( sin
p x
g g g g g
p g g
x
g g g g
x B x x
B x mlx x mg x x u
M m x M m x l M m x M m x M m x
f x
x
B x M m M m g x
B x x mx x x
l M m x M m x ml M m x l M m
1 3 2 2 3 3 cos
) ( g sin )
u x x l M m x
ESIME ZAC Página 37
Para la obtención de “A y B”, se debe resolver cada una de las derivadas parciales
de las ecuaciones (2.39), después de ello deberá evaluarse cada resultado en alguno de los puntos de equilibrio del sistema, para este trabajo el punto que se eligió fue en el origen
(0,0,0,0) es decir:
x
1
x
2x
3x
40
; ya que dicho punto se encuentra dentro del rangode trabajo de la grúa, por lo cual al linealizar el sistema la información que alcanzara a perderse del modelo no lineal sería mínima.
1 1 1 1
1 2 3 4
2 2 2 2
1 2 3 4
3 3 3 3
1 2 3 4
4 4 4 4
1 2 3 4 (0,0,0,0)
f f f f
x x x x
f f f f
x x x x
A
f f f f
x x x x
f f f f
x x x x
1 2 3 4 (0,0,0,0) f u f u B f u f u (2.39)
Cabe mencionar que el sistema de la grúa viajera puede tener más de un punto de
equilibrio, por ejemplo tiene un punto de equilibrio en:
x
1
x
2x
40
yx
3
n
. Donde0, 1, 2, 3....
n Sin embargo, como ya se había mencionado la grúa no sobrepasara
valores mayores a “π”. Además es conveniente usar el punto equilibrio en el origen, siempre que este exista.
Resolviendo las ecuaciones (2.39), resulta lo siguiente:
2
0 1 0 0
0
0 0 0 1
( ) ( )
0
p x
g g g
g p g
x
g g g
B
B gm
M M lM
A
g M m B M m
B
lM lM ml M
0 1 0 1 g g M B lM
ESIME ZAC Página 38
Si se adecuan las ecuaciones (2.40) en una representación de espacio de estados:
1 2 3 4 2 1 2 3 40 1 0 0 0
1 0
( )
0 0 0 1 0
( ) ( ) 1
0
( ) 1 0 0 0
p x
g g g g
g p g
x
g
g g g
B
B gm x
M M lM x M
x t u
x x
g M m B M m
B
lM
lM lM ml M
x x y t x x (2.41)
La expresión (2.41) representa el modelo en espacio de estados de una grúa viajera, con dicho término se puede determinar la función de transferencias y con ella conocer las características del sistema como: estabilidad, controlabilidad, observabilidad y demás.
De (2.41), se puede identificar las ecuaciones de estado (2.42) que describen las múltiples entradas del sistema, por otro lado las salidas vienen descritas de acuerdo a lo que se desee controlar, en este caso la variable sobre la cual se realizara el control será la posición.
1 2
2 2 3 4
3 4
4 2 3 2 4
1
( ) ( ) 1
p x
g g g g
g p g
x
g g g g
x x
B
B gm
x x x x u
M M M l M
x x
g M m B M m
B
x x x x u
M l M l M ml M l
(2.42)
ESIME ZAC Página 39
CAPÍTULO 3:
Selección del
Sistema de Control
Aplicado al Modelo
de Una Grúa Viajera
¿Qué es un “sistema”, y en particular un “sistema de control”? Se puede pensar en
un sistema como una caja negra que tiene una entrada y una salida. Se considera una caja negra debido a que en realidad no es importante qué tiene dentro, sino la relación entre la salida y la entrada (W. Bolton, 2001).
Sería difícil responder de una forma exacta a esta pregunta pero todos tenemos una idea más o menos clara de la respuesta. Hoy en día casi todas las actividades en las que se desarrolla el ser humano aparece involucrado de alguna u otra forma un sistema de control.
ESIME ZAC Página 40
3.1 Sistemas de control
El termino sistema se emplea para describir un conjunto de componentes que interactúan entre sí, donde sólo es de interés la interacción entre la entrada o entradas y su salida o salidas, sin necesidad de estudiar en detalle las interacciones entre los componentes que lo forman.
El objetivo principal de un sistema de control es mantener una o varias variables de algún tipo, en un valor o rango de valores previamente definidos a través de los componentes de un sistema de control en lazo abierto, en lazo cerrado, o en la configuración necesaria de acuerdoa lo que requieran las personas o los procesos de producción.
La Figura 3.1muestra cómo es posible representar un sistema mediante una caja, con las entradas y salidas indicadas por líneas con flechas, en las que la dirección de la flecha hace referencia ya sea a una entrada o a una salida (W. Bolton, 2001).
Figura 3.1: Sistema de control
Los componentes básicos de un sistema de control se pueden describir mediante:
Objetivos de control.
Componentes de sistema de control.
Resultados o salidas.
ESIME ZAC Página 41
El objetivo de cualquier estrategia de control es mantener a una variable controlada, la cual se encuentra próxima a un valor deseado, conocido como punto de ajuste
o “set-point”.
Los principales tipos de sistemas de control son:
Sistema de Control de Lazo Abierto.
Sistema de Control de Lazo Cerrado.
Sistemas de Control de Lazo Abierto.
Se denominan sistemas de control de lazo abierto cuando la salida no tiene efecto sobre la acción de control, es decir no se compara la salida con la entrada de referencia. Por lo tanto, para cada entrada de referencia corresponde una condición de operación fija. Así, la precisión del sistema depende de la calibración y del operador, cuya función será la del controlador como se muestra en la Figura 3.2 (Cosco Grimaney, 2008).
Figura 3.2: Elementos de un sistema de control en lazo abierto.
Sistema de Control en Lazo Cerrado.
Se denomina sistema de control de lazo cerrado cuando frente a la presencia de perturbaciones, tiende a reducir la diferencia entre la salida del sistema y el valor deseado o
ESIME ZAC Página 42
Un sistema con una o más trayectorias de realimentación como se muestra en la Figura 3.3 se denomina sistema de lazo cerrado (C. Kuo, 1996).
Figura 3.3: Elementos de un sistema de control en lazo cerrado.
Sistemas de control en lazo cerrado en comparación con los sistemas en lazo abierto.
Desde el punto de vista de la estabilidad, el sistema de control de lazo abierto es más fácil de desarrollar, porque la estabilidad del sistema no es un problema importante. Por otra parte, la estabilidad es una función principal en el sistema de control de lazo cerrado, lo cual puede conducir a corregir en exceso errores que producen oscilaciones de amplitud constante o cambiante (Ogata, 1998).
3.2 Introducción a los controladores PID
El término controlador en un sistema con realimentación a menudo está asociado con la señal actuante, el error ‘e’, y la variable de control ‘u’. Pero algunas veces incluye el punto de suma, los elementos de realimentación o ambos.
Clasificación de los controladores.
Los controladores se clasifican de acuerdo con sus acciones de control, como:
Proporcionales.
Proporcional-integral.
Proporcional-derivativo.