Israel Pablo Rivera Ríos, Instituto de Matemáticas de Bahía Blanca Lucía Rotger García, Universidad de La Rioja. Códigos Reed-Muller: Las matemáticas detrás de las primeras fotografías del Planeta Rojo", Andoni De Arriba De La Hera.
Introducción
Hay muchos resultados bien conocidos sobre funciones representativas, como el teorema cuadrático de Lagrange, que establece que 𝑟4(𝑛) >0 para todo 𝑛 ∈; es decir, cada número entero no negativo es una suma de cuatro números enteros cuadrados. Aplicaremos esta teoría al estudio de los enteros gaussianos, que son los elementos de la forma 𝑎 + 𝑏i con 𝑎,𝑏 ∈ considerados como un subanillo de números complejos.
Un repaso de teoría de divisibilidad
En ese caso, 𝑑 se llama factor de 𝑎, mientras que la igualdad 𝑎 = 𝑚𝑑 es una factorización de 𝑎. Se dice que dos elementos 𝑎,𝑏 ∈ 𝐴 están asociados (o 𝑎 es asociado de 𝑏, o 𝑏 es asociado de 𝑎) si generan el mismo ideal; es decir, si(𝑎) = (𝑏).
Un dominio de factorización única (DFU) es un dominio íntegro en el que todo elemento no nulo y no invertible es producto de irreducibles de manera única salvo reordenaciones y asociados. ◀
- Enteros gaussianos
- Primos gaussianos y sumas de dos cuadrados
- Número de representaciones como suma de dos cuadrados
- Apunte sobre funciones multiplicativas
- Expresión de la función de representación
- Conclusiones
Un número entero 𝑛 se puede representar como suma de dos cuadrados si y sólo si existe un entero gaussiano 𝛼 tal que 𝑛 = 𝑁(𝛼). En resumen, cualquier 𝑛 en el que los primos 𝑝 ≡3mod4 ocurren con multiplicidad par es una suma de dos cuadrados.
En este artículo hemos visto cómo la teoría de números puede alimentarse del álgebra y hemos tocado algunos conceptos de la teoría algebraica de números, como los primos de desintegración, ramificación o inertes, así como algunos conceptos de la teoría del análisis de números, como las funciones multiplicativas. y convolución de Dirichlet. Todos estos detalles nos han ayudado a resolver un problema clásico que ilustra muy bien cómo es la teoría de números, en el que se utilizan muchas herramientas diferentes para demostrar una afirmación aparentemente inocente.
- El espacio de las curvas planas diferenciables como un espacio de Fréchet
- El espacio de curvas planas cerradas regulares como variedad de Fréchet
- Una métrica riemanniana sobre el espacio de las curvas cerradas regulares en el plano
- El embebimiento
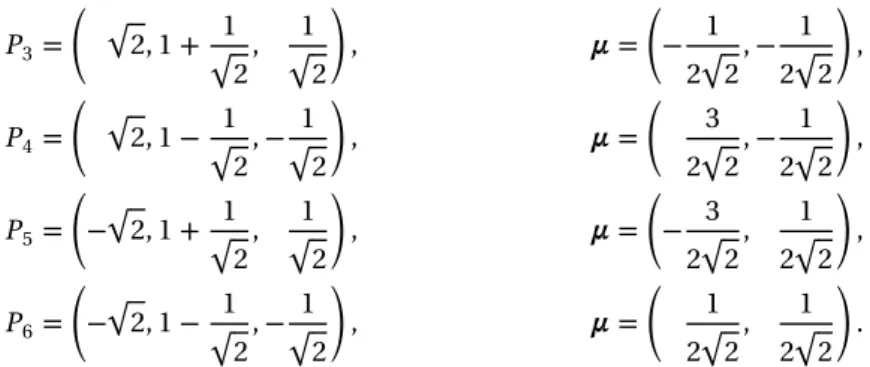
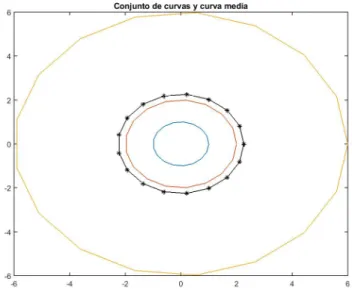
- La curva media extrínseca de una familia finita de curvas planas cerradas regulares
- El algoritmo
- Una discretización del algoritmo
- Aplicación a una imagen médica
- Conclusiones
Tenga en cuenta que la curva media exterior es un círculo cuyo radio es la media geométrica de los radios de la muestra. En consecuencia, se puede argumentar que la aplicación de la geometría en el espacio de formas es un campo abierto a más investigaciones.
El teorema de Langrange
En esta sección, se define la noción de programas con restricciones de igualdad, se brinda el teorema de Lagrange (utilizado para resolver dichos programas) y se brinda un ejemplo ilustrativo. La demostración más común de este teorema utiliza el teorema de la función implícita, que requiere la hipótesis de que 𝑚 < 𝑛, y se puede encontrar en el libro de Apostol [1]. Vale la pena señalar que lo contrario del teorema de Lagrange no es cierto: es posible que la condición de Lagrange tenga una solución 𝒙∗ ∈ 𝛺 pero que 𝒙∗ no sea ni mínimo ni máximo bajo 𝑓 sujeto a las restricciones de igualdad 𝑔1 ( ) =0,…,𝑔𝑚( 𝒙) =0.
La función 𝑓 es continua y el conjunto 𝐾 = {(𝑥,𝑦) ∈ 2 ∶ 𝑥2+ 𝑦2 ≤ 1} es compacto, entonces el teorema de Weierstrass garantiza la existencia de mínimo y máximo de 𝑓en𝐾. Al intentar un problema de extremos condicionados con el método del multiplicador de Lagrange, es teóricamente fácil determinar el sistema de Lagrange asociado, pero en la práctica no siempre existe un procedimiento simple y rápido para resolverlo exactamente. En esta situación una posibilidad es aplicar métodos numéricos con los que se obtienen buenas aproximaciones de la solución del sistema de Lagrange.
El teorema de Karush-Kuhn-Tucker tiene la respuesta, como se verá en la siguiente sección.
El teorema de Karush-Kuhn-Tucker
Además, Wu y Wu [15] proporcionaron varias pruebas de la desigualdad de Cauchy-Schwarz, que son bastante sorprendentes por su simplicidad. En su trabajo, Karush demostró una condición necesaria para la existencia de un mínimo local de una función de varias variables 𝑓 = 𝑓(𝑥1,…,𝑥𝑛), sujeto a una desigualdad de la forma 𝑔1(𝑥) ≥0,…,𝑔𝑚 (𝑥 ) ≥0z𝑛 ,𝑚. Karush hizo su trabajo en 1939, mientras la Escuela de Chicago se centraba en problemas de cálculo de variaciones con restricciones de desigualdad donde se minimizaban los funcionales de forma.
El trabajo de Karushi fue así concebido como una versión en dimensión finita de los problemas abordados en el cálculo de variaciones y, por tanto, en el ambiente de la Escuela de Chicago careció de interés y pasó desapercibido. El objetivo de Kuhn y Tucker era generalizar la programación lineal, que ya había aparecido años antes de la mano de Dantzig. El fin de la Segunda Guerra Mundial también significó la igualdad entre las matemáticas puras y las matemáticas aplicadas.
Según el teorema de conservación de signos, existe 𝜀2>0 tal que las restriccionesℎ𝑗 con𝑗 =𝑧+1,…,𝑞 son negativas en𝐵(𝟎,𝜀2).
Programación convexa y cóncava
Finalmente se aplican las dos condiciones que aún no se han aplicado (factibilidad y signo) y se resumen los resultados. Si 𝒙∗ ∈ 𝛺 es un punto factible y regular para el programa convexo y satisface las condiciones de Karush-Kuhn-Tucker, entonces 𝒙∗ es una solución del programa convexo, es decir: 𝒙∗ es un mínimo global de 𝑓 dependiendo de ℎ𝑘 (𝒙) ≤0 para 𝑘 =1 ,…,𝑚. En la situación del teorema 15 se deduce del teorema 12 que si la función objetivo 𝑓de (PC−) (resp.
La convexidad es una herramienta eficaz que proporciona una condición suficiente para resolver ciertos problemas de optimización y, además, grandes ramas dentro de la programación, como la programación lineal (donde la función a optimizar es una función lineal), geométrica (donde la función a optimizar es necesario optimizar). es posinom2) o cuadrática (donde la función a.2Un posinom tiene la misma expresión que un polinomio en varias variables𝑥1,…,𝑥𝑛, pero aquí las variables solo son positivas, los coeficientes solo son positivos y los exponentes son reales (positivos, negativos o cero... es una función cuadrática óptima), se puede atacar usando el Teorema 15. Un análisis histórico contextualizado del teorema de Kuhn-Tucker en programación no lineal: el impacto de la Segunda Guerra Mundial».
9] MARTÍNEZ SÁNCHEZ, Francisco Javier Una generalización del teorema del multiplicador de Lagrange: condiciones de Karush-Kuhn-Tucker en programación no lineal.
Repaso a la teoría de códigos lineales
- Nociones básicas
- Procesos de codificación y decodificación
- Codificación por matrices generadoras dadas en forma estándar
- Métodos generales de decodificación
- Algunas construcciones de códigos lineales
Un código lineal 𝒞 detecta hasta 𝑡erroressi, recibe𝒚 = 𝒄 + 𝒆(siendo 𝒄la palabra clave enviada y 𝒆el error dado en la transmisión, también representado como una palabra), con 0< 𝜔(𝒆) ≤, entonces podemos 𝑡 asegurar que 𝒚 ∉ 𝒞. A su vez, un código lineal corrige 𝒞 a 𝑡errores si, recibido𝒚, existe como máximo una palabra de código𝒄 ∈ 𝒞 que satisface 𝑑(𝒚,𝒄) ≤ 𝑡. Esto es nuevamente un código 𝑞-ario lineal de longitud 𝑛, pero de dimensión 𝑛 − 𝑠 en este caso.
Esto se debe a que cada generador 𝐺 y matriz de control 𝐻 del código lineal 𝒞 está relacionado por la igualdad 𝐺𝐻⊤=0 (o equivalentemente 𝐻𝐺⊤=0). Dado 𝑠a natural, este es el código lineal binario de longitud 𝑛 =2𝑠 y dimensión 𝑠, cuya matriz generadora se construye por columnas de la siguiente manera: para cada 𝑖 ≤ 𝑛natural, la 𝑖-ésima columna corresponde a bits de la representación binaria del entero 𝑖. Ya hemos dicho que para dar un código 𝒞 lineal basta con dar una matriz generadora.
Sin embargo, en general, para que el código lineal que tiene esto como matriz generadora coincida con 𝒞, estas transformaciones elementales solo necesitan realizarse en filas.
Códigos de Reed-Muller binarios
- Aspectos históricos
- Construcciones y propiedades principales
- Construcción original de Muller
- Construcción recursiva de Plotkin
- Construcción geométrica
- Métodos de codificación y decodificación en códigos de Reed-Muller binarios
- Algoritmo de Reed
Como ya se mencionó, existen tres formas de introducir los códigos binarios Reed-Muller. Se define mediante el código binario de Reed-Muller ℛℳ(𝑟,𝑚) de orden𝑟y longitud𝑛 a la imagen directa de𝒫𝑚(𝑟) mediante el mapa dado en (3). Por lo tanto, ahora podemos enumerar las palabras del código Reed-Muller deseadas y tenemos que son.
Nuestro objetivo es describir códigos binarios de Reed-Muller en términos de variedades afines 𝐸𝐺(𝑚, 2). El código binario de Reed-Muller ℛℳ(𝑟,𝑚) es el subespacio vectorial generado por todas las palabras características asociadas con las variedades afines 𝐸𝐺(𝑚, 2) de dimensión al menos 𝑚 − 𝑟. Finalmente, examinaremos los métodos apropiados para codificar y decodificar códigos binarios Reed-Muller.
Dados los parámetros 𝑟y𝑚 del código binario Reed-Muller, calculamos la matriz generadora dada en forma estándar con la que trabajaremos.

Anexo: algunos programas en Mathematica
- Metodología básica en fiabilidad
- Función de distribución, fiabilidad y razón de fallo en fiabilidad
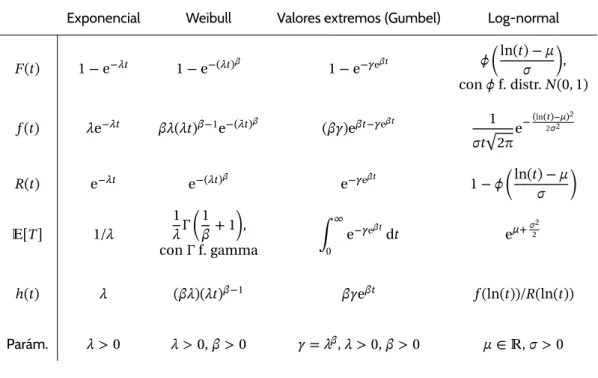
- Expresiones de algunas distribuciones en fiabilidad
- Análisis gráfico
- Distribuciones tipo fase
- Simulación con R
- Conclusiones
Una razón fundamental de la popularidad e importancia de la distribución exponencial para su uso en el campo de la confiabilidad (quizás el más utilizado) es su simplicidad y versatilidad. La forma final de la nube de puntos dependerá de la distribución de probabilidad que se considere. El objetivo de esta sección es demostrar el poder regulador de las distribuciones tipo fase.
En consecuencia, esta será la distribución elegida para compararla con la distribución tipo fases al final de este apartado. Los parámetros de la distribución tipo fase se estiman aplicando el algoritmo EM con la aplicación EMpht y el mapa del paquete R. Una vez estimados los parámetros de la distribución tipo fase, se muestra gráficamente la precisión del ajuste de esta distribución a los datos. observado y simulado.
Finalmente, se procede a comparar los ajustes obtenidos con la distribución de Weibull y la distribución tipo fase.
Apéndice
- Álgebras de Boole
- Átomos, ultrafiltros y el teorema de Stone
- Espacios de Stone
En particular, un álgebra booleana tendrá un número natural cardinal si y sólo si es una potencia de 2. Decimos que un 𝐼 ideal en un álgebra de Boole es 𝔅 primosi y solo si es correcto y, para cada 𝑎,𝑏 ∈ 𝔅, si 𝑎 ∧ 𝑏 ∈ 𝐼 tenemos 𝑎 ∈ 𝐼 o 𝑏 ∈ 𝐼. Un elemento 𝑎 de un álgebra de Boole está en un ultrafiltro si y sólo si 𝑎 > 0.
Recordamos que Ult𝔅 es el conjunto de todos los ultrafiltros de un álgebra booleana 𝔅 y que el mapa de Stone es un monomorfismo de álgebras booleanas. Cada álgebra de Boole es isomorfa al álgebra de Clopen de un espacio de Stone. Más específicamente, el espacio dual Ult𝔅 de un álgebra booleana 𝔅 es un espacio Guri y la aplicación Guri𝑠 ∶ 𝔅 → 𝑃(Ult𝔅) es un isomorfismo entre 𝔅 y Clop(Ult𝔅).
Cada espacio de piedra es homeomorfo al espacio de piedra de un álgebra de Boole.
Buscando triángulos en grafos muy grandes
- Complejidad y notación asintótica
- Property testing
- El modelo de grafos densos
- El modelo de grado acotado
- El modelo de grafos generales
- El problema de la ausencia de triángulos
- Ausencia de triángulos en el modelo de grado acotado
- Ausencia de triángulos en el modelo de grafos densos: regularidad
- Ausencia de triángulos en el modelo de grafos generales: cotas
- Conclusiones y otros problemas
De manera más general, considere el problema de colorear 𝑘 (es decir, queremos saber si los vértices del gráfico se pueden colorear de manera que no haya dos vértices del mismo color unidos por una arista). El problema de los triángulos faltantes en el modelo a escala finita fue resuelto por Goldreich y Ron [13] en el mismo artículo en el que presentaban el modelo en cuestión. Por definición, si una gráfica está 𝜀 lejos de estar libre de triángulos, entonces se deben hacer al menos 𝜀𝑛 modificaciones en las aristas para convertirla en una gráfica libre de triángulos.
Por lo tanto, debemos comprobar que el algoritmo es correcto cuando la gráfica 𝐺 = (𝑉,𝐸) para la entrada está 𝜀-lejos de la ausencia de triángulos. Si definimos una gráfica 𝐺3 como la que se obtiene de 𝐺2 después de eliminar todas estas aristas, tenemos que 𝐺3 está al menos (58𝜀) lejos de estar libre de triángulos. El problema de la ausencia de triángulos en el modelo gráfico general fue investigado por Alon, Kaufman, Krivelevich y Ron [4].
Por lo tanto, queremos encontrar límites en la complejidad de los algoritmos que verifican si la gráfica de entrada no tiene triángulos o está a 𝜀 de no tener triángulos para cualquier aumento asintótico en el número de aristas.

![Figura 2: Tumor neuroepitelial disembrioplástico y curvas de la muestra. Imagen original (izquierda) tomada por Gaillard [7] con licencia cb CC BY 3.0 Internacional.](https://thumb-us.123doks.com/thumbv2/123dok_es/12316239.0/39.892.121.778.134.505/figura-neuroepitelial-disembrioplástico-original-izquierda-gaillard-licencia-internacional.webp)