Introducci´on
El descubrimiento de los espectros solares por parte de Fraunhofer en 1814 y los posteriores experimentos de Kirchhoff en 1859 y el increíble desarrollo de la astrofísica al que estaban dirigidos llegarían más tarde. Darwin sobre la aceleración secular de la Luna; el trabajo de Laplace y Poincar´e sobre las mareas.
Ecuaciones y soluciones
- Los trabajos de Hamilton y Jacobi
- Desarrollo de la funci´ on perturbadora
- Soluci´on de las ecuaciones de movimiento
- El descubrimiento de Neptuno
Laplace es responsable del primer desarrollo de la función de perturbación de las órbitas planetarias hasta el tercer orden en excentricidades e inclinaciones. Benjamin Peirce también publicó un desarrollo de la función de perturbación de sexto orden en 1849 en el Astronomical Journal.
Las teor´ıas del movimiento de la Luna
La teor´ıa de Delaunay
Tras la muerte de Delaunay, Airy y Henri Andoyer presentaron algunas correcciones a la teoría y así fue reflejada por R. Este trabajo sirvió para determinar las efemérides lunares de La Connaissance de 1915 a 1925, para ser sustituida por la teoría de Hill-Brown (que será discutido después).
La teor´ıa de Hill-Brown
Darwin, Brown atacó el problema del movimiento de la luna utilizando el método de Hill. Hill calculó todos los términos que tenían un coeficiente superior a una centésima de segundo de arco, pero la precisión de la teoría era en realidad menor.
Los sat´elites de los planetas
Es en el cuarto volumen de esta obra, después de haber expuesto las contribuciones de Laplace y Souillart a la teoría de los satélites galileanos, que presenta sus resultados. Entre 1848 y 1892 la longitud nodal de la órbita del satélite avanzará unos 7°; Este avance se atribuyó al aplanamiento de Neptuno.
Las teor´ıas planetarias
- Trabajos diversos
- Las teor´ıas planetarias de Le Verrier
- Las teor´ıas planetarias de Newcomb y Hill
- Los c´ alculos de Le Verrier: una nueva formulaci´on de la estabilidad del
- Poincar´e: la respuesta de los matem´aticos
- Los resultados modernos
En el Capítulo 3, estudiaremos la solución analítica de la ecuación de Kepler. Prueba: Usando la integral de energía (3.7), podemos escribir la ecuación de movimiento (3.9) con
El problema de Kepler 33
Las leyes de Kepler
Las leyes fueron formuladas básicamente a partir de las observaciones precisas de las órbitas de la Tierra y del planeta Marte realizadas por el astrónomo danés T. En particular, el descubrimiento de la ley de áreas se basa en una afortunada combinación de errores.
Las leyes de Newton y la ley de gravitaci´on universal
Incluso en el sistema copernicano, esta posición media se convierte en el centro de la órbita de la Tierra, pero no en el Sol. Deducción de las leyes de la gravitación (universal) a partir de las leyes de Kepler.
Deducci´on de las leyes de la gravitaci´on (universal) a partir de las leyes
Esto significa que el vector de aceleración de la partícula tiene sólo una componente radial; Según la segunda ley de Newton, la fuerza es radial. El carácter universal de la ley de la atracción gravitacional fue establecido por Newton a partir de la igualdad de la aceleración gravitacional en la superficie de la Tierra, g, que fue medida por Galileo y tuvo en cuenta el siguiente c cálculo de esta cantidad: Si a una distancia R desde el centro de la Tierra, la aceleración gravitacional es g, en la Luna, que está a una distancia r, esta aceleración será (R2/r2)g, ya que la aceleración disminuye con el cuadrado de la distancia.
Relaciones geom´etricas entre las leyes de Kepler y las de Newton
Relaciones geométricas entre las leyes de Kepler y las leyes de Newton Veremos, siguiendo el razonamiento de Newton, que si una partícula se mueve debido a. Es decir, la aceleración a (y, por tanto, la fuerza) es inversamente proporcional al cuadrado de la distancia.
Secciones c´ onicas
Está claro que esta ecuación es la de una parábola si e = 1, o la de una hipérbola si e > 1. A partir de aquí no es difícil escribir y,x y t en función de la nueva variable s para no calcular .
Formulaci´on del problema de Kepler
- Formulaci´on Newtoniana
- Formulaci´on Lagrangiana
- Formulaci´on Hamiltoniana
Formulación del problema de Kepler 45 Si restamos la expresión anterior a la obtenida con S′(α), resulta. De la fórmula de donde obtenemos la expresión, obtenemos que se convierte en el hamiltoniano del problema de Kepler.
Integrales primeras
Consideremos ahora algunas consecuencias de la deducción de la conservación del momento angular. Dado que el movimiento de la partícula se produce en un plano, podemos introducir un sistema de coordenadas polares en el plano donde se produce el movimiento, de modo que c= (0,0, c) ir= (rcosϕ, rsinϕ, 0).
El potencial eficaz
La segunda ecuación (2.18) es la ley de conservación de energía para un sistema con un grado de libertad, cuya función potencial es Uef(r) =−Vef(r). Por lo tanto, si trazamos una línea horizontal en la Figura 2.8 con una ordenada igual a un cierto valor de la energía total h, los valores de r para los cuales el movimiento es posible están determinados por las intersecciones de esta línea horizontal con la gráfica, que corresponderá a los puntos de la órbita para los cuales ˙r= 0 se cumple.

Las trayectorias
- Les trayectorias en un campo central
- El teorema de Bertrand
En este caso, con la identidad vectorial, tenemos (r v)2 + (r∧v)2 =r2v2 c=r v, de lo que se deduce que la magnitud de la velocidad también permanece constante. De la ecuación (2.32) se aplica el período de oscilaciones. 2.33) Calculemos el cambio del ángulo ϕ en el intervalo de tiempo que transcurre entre el mínimo y el máximo de r sucesivos.

La hod´ografa
En el caso hiperbólico, el ángulo, δ, que forman las tangentes a la circunferencia coincide con el formado por las dos asíntotas de la hipérbola y verifica que sen(δ/2) = 1/e (ver Figura 2.10). Ahora veamos la relación entre momento angular, energía y excentricidad, lo que nos permitirá determinar la velocidad de la partícula en función de allí.
C´alculo de efem´erides
- Caso parab´olico (h = 0)
- Caso h 6 = 0
- Soluci´on num´erica de la ecuaci´on de Kepler
Para el caso parabólico, introducimos la anomalía excéntrica, E, a través de la ecuación diferencial. Para determinar los ceros de la ecuación de Kepler, simplemente considere el caso M ∈[0, π].

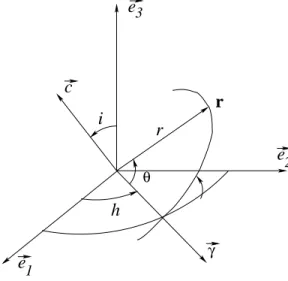
Los elementos orbitales
- Los elementos Keplerianos
- Los elementos de Delaunay
Los Elementos Orbitales 65 Para determinar la posición de las órbitas en su plano orbital: el argumento del pericentro ω. Para determinar la posición de una partícula en la trayectoria: la época del pericentro tp.
Soluci´on por series del problema de Kepler. Series f y g
- Convergencia de las series f y g
En términos de la verdadera anomalía, que llamaremos v y la distancia r, también se pueden escribir como. En esta ecuación, M0 es el valor de la anomalía media correspondiente al tiempo t0.
La segunda ley de Kepler
Podem escriure la integral d'energia com h = 1. 2u= 0, que és l'equació d'un oscil·lador harmònic bidimensional. Les dues primeres equacions, independents de la tercera, són on les equacions del problema de dos cossos m0 i m1.
Regularizaci´ on del problema de Kepler 73
Movimiento rectil´ıneo
El caso b= 0 puede sugerir que x=at t2/3 es la solución de la ecuación de movimiento, como se puede verificar directamente. De esta forma vemos que la solución obtenida poniendo b = 0 es la solución parabólica del problema colineal y es el término dominante de la solución general.
Transformaci´on de Levi-Civita en dimensi´on 1
Si sustituimos esta relación y su derivada en la ecuación de energía, obtenemos:

Movimiento en el plano
- Propiedades de la matriz L(u) y la ecuaci´on de movimiento
Ahora daremos algunas propiedades de la matriz de Levi-Civit que intentaremos preservar cuando estudiemos el movimiento en R3.
Regularizaci´on del movimiento en el espacio
- Ecuaciones regularizadas de movimiento
Algunas de las propiedades fundamentales de la transformación Levi-Civita se conservan en esta nueva transformación. REGULACIÓN DEL MOVIMIENTO EN EL ESPACIO 81 Teniendo en cuenta que nuestra transformación es una generalización de la de Levi-Civita, definamos su′(0) por.
Tratamiento uniforme de los tres tipos de movimiento kepleriano
Leyes dobles de la atracción entre pétalos 83 Podemos escribir las variables en términos de tcomo.
Leyes duales de atracci´on centr´ıpeta
En este caso, la ecuación de movimiento (3.12) representa una ley de atracción inversamente proporcional al cuadrado de la distancia. En este caso, la ecuación de movimiento (3.12) representa la ley de reflexión, que es inversamente proporcional al cuadrado de la distancia.

Aspectos topol´ ogicos del problema de Kepler
- Variedades de energ´ıa y momento angular constantes
- La variedad de ´ orbitas el´ıpticas
La integració de la segona equació de (7.46) es pot fer introduint l'anomalia excèntrica mitjançant r=a(1−ecosE). De manera semblant podem calcular els termes del costat dret de les altres equacions diferencials.

Desarrollos en le movimiento el´ıptico 95
Si cambiamos la variable z= 2tx obtenemos Jn(x) = 1. n+r)!, obtenemos el desarrollo en series de potencias de las funciones de Bessel.
Recuerde que el módulo de momento angular, c, es el doble de la velocidad areolar, y eso. Si tomamos en cuenta la evolución calculada para senjE en términos de funciones de Bessel a partir de la relación que obtuvimos anteriormente, resulta.
Convergencia de los desarrollos en series
L'evolució dels valors propis del diferencial DF(L4,5) es mostra a la figura 7.6. Podríem calcular els termes d'ordre superior de S i F′ si haguéssim continuat evolucionant cap a potències de grau superior a J2.
Determinaci´ o i transfer` encia d’` orbites 107
Determinaci´o d’`orbites a partir de dos vectors posici´o. M`etode de Gauss
- Relaci´o entre les ` arees del sector i el segment circular
- Primera equaci´o de Gauss
- Segona equaci´o de Gauss
- Resoluci´o de les equacions de Gauss
- Algorisme de Gauss
- C`alcul dels elements orbitals
Com Gauss ja ha demostrat, el problema de determinar un camí a partir de dos vectors de posició està estretament relacionat amb el de trobar la relació de les àrees del sector al triangle determinat per l'òrbita i els dos vectors de posició. L'òrbita del satèl·lit que passa per r1 i r2 sempre es mou en el pla determinat per aquests dos vectors.
Determinaci´o d’`orbites a partir de dos vectors posici´o. Soluci´o del problema mit-
Si estudiem l'òrbita a l'espai, es poden donar dues situacions, segons si r1 i r2 són colineals o no. Si no, aleshores r1∧r2 és un vector normal al pla de l'òrbita i les seves components, que són proporcionals a .
Determinaci´o d’`orbites a partir de tres mesures angulars
- Millora del m`etode
- Millora de Gibs
- M`etode de Laplace
A més, els nous coeficients introduïts es poden aproximar mitjançant expressions que depenen dels intervals de temps entre les observacions. Les tres segones derivades que apareixen al terme de la dreta es poden eliminar mitjançant l'equació del moviment: obtenint ¨ri =−µr1/r3i omnir.

Transfer`encia d’`orbites
- Transfer`encies biparab`oliques
- Transfer`encies biel.l´ıptiques
- Transfer`encia bitangent
D'aquesta manera, si R > R, la transferència biparabòlica és millor que la de Hohmann, però triga més a realitzar-se. Si R > R∗H la transmissió òptica és millor i queda per analitzar el cas R < R < R∗H.

Equacions del moviment i integrals primeres
TEOREMA DE SUNDMAN 133 Per obtenir aquesta darrera igualtat hem considerat que U és una funció o homogeneïtat de i.
El teorema de Sundman
Teorema 6.2.1 La condició necessària per al col·lapse total és que el moment angular sigui zero.
Solucions particulars
- Solucions planes
- Solucions coplan`aries
- Solucions colineals
- Solucions rectil´ınies
- Solucions homogr`afiques
Com que Π conté el centre de massa, podem pensar-hi com el pla xy del sistema de referència baricèntric. Com que el centre de masses pertany a aquest pla, podem pensar-hi com el pla xy.
Solucions homogr`afiques planes del problema de tres cossos
- Les solucions de Lagrange del problema pla de N cossos
Els termes d'ordre superior en el desenvolupament de la sèrie de la funció potencial no es poden interpretar simplement com els tres primers. Com ja hem comentat, l'expressió dominant és la funció pertorbadora del camp gravitatori.

Transformacions can` oniques 147
Transformacions can`oniques i par`entesi de Poisson
El caràcter complex de la matriu jacobiana s'escriu aquí immediatament en termes de claudàtors de Poisson. Els claudàtors de Poisson de les dues funcions són invariants a transformacions totalment canòniques.
Transformacions can`oniques i formes diferencials
Les transformacions de Mathieu, definides en el teorema següent, ens donen una manera de definir una transformació cònica en la qual es compleixen algunes igualtats predeterminades entre les coordenades antigues i noves. Com que lesfk és zero, la forma diferencial és exacta i, per tant, completament canònica.
Elements de Delaunay
- Reducci´o al pla del moviment
- L´anomalia exc`entrica i l´ anomalia mitjana
- L´equaci´o d’Hamilton–Jacobi
- Singularitats virtuals
Això donarà com a resultat que les equacions diferencials associades compleixin ˙h= ˙H = ˙Θ = 0, que és una altra manera de dir que c és constant. La integració de la primera equació de (7.33) es fa introduint una variable auxiliar, E, anomenada anomalia excèntrica, amb la següent construcció geomètrica.
El problema restringit de tres cossos
- Equacions del moviment
- Coordenades de Jacobi
- El criteri de Tisserand
Les dues equacions addicionals representen la dependència de la variació d'energia respecte a ti. D'altra banda, l'excentricitat de l'òrbita de Júpiter és molt petita (i podem considerar aquesta òrbita com a circular).
Formulaci´o Hamiltoniana
Com he dit abans, aquest és un criteri aproximat; Tanmateix, si substituïm els elements de les "dues" cometes corresponents a dos períodes diferents a l'equació anterior i la igualtat és clarament falsa, podem estar segurs que no es tracta d'una cometa única.
El problema restringit el.l´ıptic
Solucions d´equilibri del problema restringit i circular
El zero de cadascuna de les funcions dóna lloc a un punt d'equilibri de les equacions del problema restringit. Aquests punts es coneixen com a punts d'equilibri colineal i solen indicar-se amb els símbols L1, L2 i L3, tal com es mostra a la figura. Donat un valor del paràmetre de massa µ, la determinació de les coordenades dels punts d'equilibri colineal s'ha de fer resolent equacions i (7.73).

Regions de Hill
Estabilitat des punts d´equilibri
- Els punts triangulars
- Els punts colineals
Cap dels termes de J2 conté ω de manera aïllada, ja que el terme de cos 2ω no estava present en les expansions de la funció pertorbadora. Els termes de la primera suma es poden convertir en termes de primer ordre a J2 i els altres termes a J22 de la mateixa manera.

El moviment pertorbat 171
Desenvolupament del potencial a partir del desenvolupament de l´ınv`ers de la
Desenvolupament del potencial 177 Les tres integrals que apareixen en aquesta darrera expressió són les que determinen el centre de masses del cos Ω, de manera que si prenem l'origen de les coordenades O al centre de masses, les tres integrals són on zero To Continuar amb el desenvolupament dels altres termes de la funció potencial s'ha d'utilitzar el teorema de l'addició per als polinomis de Legendre, que utilitza funcions de Legendre associades.
Les equacions del problema de dos cossos pertorbades
LES EQUACIONS DEL PROBLEMA PRESCRIT DE DOS CROMOS 179 per a j= 1,2, .., els coeficients Bkj i Ckj són tots zero. LES EQUACIONS DEL PROBLEMA AMB DOS COSSOS FIXOS 181 propietat que en facilita el càlcul és que la seva derivada respecte al temps és zero.
El potencial pertorbador en termes d´el.lements keplerians
EL POTENCIAL PERTURBADOR EN TERMES DELS ELEMENTS KEPLERIANS 185 si ara apliquem les fórmules que hem escrit per als productes de potències de les funcions trigonomètriques amb a=l−m−2t+sib=m−s, surt de El resultat final de la transformació de Vlm des de coordenades esfèriques fins a elements orbitals es pot escriure com.
Pertorbacions lineals
Els termes de la dreta d'aquestes equacions són pràcticament constants ja que a, e i el pendent no varien amb el temps (almenys al primer ordre). La variació de l'argument del node ascendent ens diu que el pla de l'òrbita sempre gira en la mateixa direcció al llarg del temps, excepte si i = π/2, que correspon a un satèl·lit en òrbita polar.
El m`etode de Von Zeipel
El mètode que presentarem aquí, que va ser introduït per Von Zeipel i desenvolupat per Brower, requerirà que F′ sigui independent d'una de les variables angulars de les quals depèn F. Si considerem el triangle esf definit pel pla de l'òrbita, el pla equatorial i el pla meridià que passa pel satèl·lit, i tenint la latitud del satèl·lit als seus costats, φ, l'argument del perigeu és la veritable anomalia, g+f i l'ascensió recta del satèl·lit. menys l'argument del node enganxós, α−Ω, es verifica.
El.liminaci´o de l´ anomalia mitja
Si ara substituïm les derivades parcials de la funció S pel seu desenvolupament en potències de J2 i ens quedem amb el primer terme, tenim. Ara els podem substituir en la tercera equació (terme d'ordre J22) i, igualant per separat els termes que depenen de l i els que són independents, calcular S2 i F2′.
C`alcul expl´ıcit de S 1
El.liminaci´o de g
Els termes de la part dreta de les tres equacions per a les quals no és igual a zero també seran constants, de manera que en la integració obtenim quel′′,g′′ ih′′ s on tres funcions lineals del temps .
Principals resultats
Aplicaci´o de les equacions de Lagrange: primera aproximaci´o
1−e2 amb 1 i el coeficient de ∂R/∂e de l'equació de Lagrange amb 1/na2e, en multiplicar només obtenim termes en e−1 i constants. Per obtenir per a M tots els termes del mateix tipus que per a la resta de variables (terme secular i curt termini de primer ordre en J2), cal tenir en compte les pertorbacions de primer ordre en n.
Segona aproximaci´o utilitzant les equacions de Lagrange
Inclinaci´ o i excentricitat petites
Com que la pertorbació en el pendent és petita, una possibilitat és considerar el problema com si fos pla i, per tant, ignorar la variablesii Ω.
Inclinaci´ o cr´ıtica
Introduction
- Transfers within the Solar System
Equations of motion
- The n-body problem as a perturbation of the Kepler problem
- The restricted three body problem
- The n-body problem as a perturbation of the restricted three body problem208
- Spheres of gravitation
- Spheres of influence
- Hill’s spheres
Patched conics
- Passage near a planet
- Hyperbolic motion inside the sphere of influence
- A simplified model for the gravity assist
- Effect of perturbation manoeuvres on the spacecraft orbital characteristics 224
- Surface impact at a target planet
- Tisserand’s criterion






