También se proporciona información concreta sobre los elementos de hardware y software requeridos y se describe paso a paso el proceso de desarrollo en base a la arquitectura IoT seleccionada mediante la revisión del estado del arte. Finalmente, en el capítulo 5 se muestra el impacto de la implementación del proyecto en la industria, tanto a nivel social como económico.
Contexto
- Breve descripción del problema
- Gestión del mantenimiento industrial
- Motivación
- Objetivos
- Objetivo general
- Objetivos específicos
- Metodología
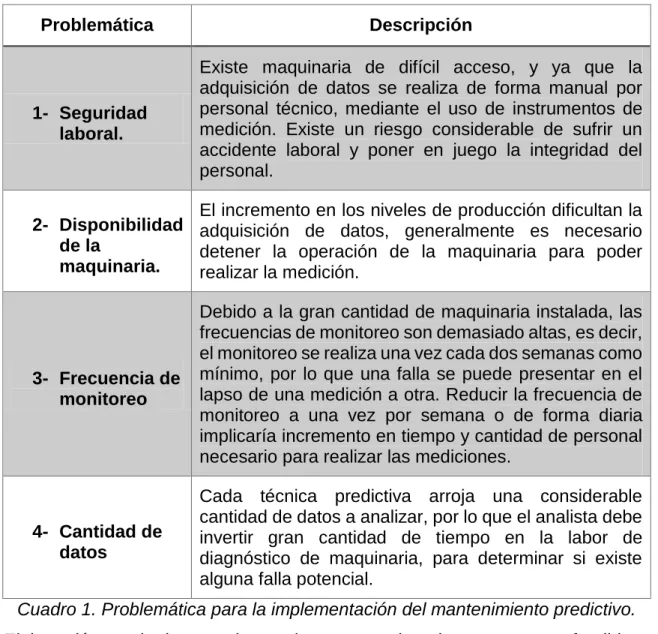
Sin embargo, también existen actividades producto de errores que se han producido durante el tiempo de funcionamiento de la máquina y que afectan la producción. En la Tabla 1 se muestran los problemas que han impedido lograr la erradicación total de nuevos errores mediante la estrategia predictiva.
Estado del arte
- Incremento de consumo de corriente en motores como síntoma de daño
- Mantenimiento 4.0 aplicado al mantenimiento predictivo
- Red de Sensores Inalámbricos para recolección de datos
- Estándar ZigBee
- Arquitectura para IoT
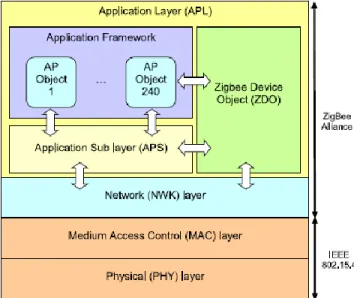
El mantenimiento predictivo tiene un enfoque que se orienta por el estado de la maquinaria y depende de información que tradicionalmente se recoge de forma semiautomática o manual utilizando una amplia variedad de herramientas de medición. Para lograr una recolección automatizada que optimice la implementación del mantenimiento predictivo, se debe utilizar la tecnología Industria 4.0 para lograr el Mantenimiento 4.0. ZigBee se basa en el protocolo IEEE 802.15.4 que define las características de la capa física (PHY) y la capa de control de acceso al medio (MAC) para redes LR. WPAN.
La comunicación entre dispositivos finales solo puede ocurrir a través de sus padres, por lo que si alguno de los padres está deshabilitado, sus hijos no podrán comunicarse con otros dispositivos en la red. Capa de red o transmisión: procesa la información proveniente de todos los nodos sensores WSN de la capa de percepción y da paso a la capa de aplicación, ya que transmite la información a un destino remoto utilizando tecnologías para la comunicación e Internet. La Figura 9 es la arquitectura utilizada para su desarrollo, como se ve contiene las 3 capas de la arquitectura general para IoT mostrada anteriormente.

Desarrollo del proyecto
Creación de la arquitectura
- Especificación de requerimientos
- Requerimientos funcionales
- Requerimientos no funcionales
- Arquitecturas desarrolladas
La fase de planificación y diseño arquitectónico, cuya actividad principal es el establecimiento de requisitos, los cuales se determinaron a través de un grupo focal con 2 expertos en mantenimiento predictivo que conforman el área de mantenimiento de una empresa manufacturera del estado de Aguascalientes. Características: Debe existir un sistema de almacenamiento de la información recibida de los nodos sensores. Más bien, surgen de la necesidad del usuario debido a restricciones presupuestarias, políticas organizativas y la necesidad de interacción.
La arquitectura de la Figura 10 muestra los elementos que componen el sistema de monitoreo y se basa en la arquitectura general de 3 capas para aplicaciones IoT. Dado que la plataforma Raspberry Pi estará conectada a la red local de la empresa, los usuarios podrán ver los datos recopilados por la WSN e interactuar con ellos desde cualquier computadora. Ambos elementos integran la tecnología XBee de la marca DIGI para construir la WSN bajo el protocolo ZigBee.
Implementación de la arquitectura
- Descripción de Hardware
- Configuración de red de sensores inalámbricos XBee
- Construcción del prototipo
La estructura de datos transmitida por los dispositivos XBee se conoce como trama API Figura 13 y se forma de la siguiente manera [36]. Delimitador de inicio: Es el primer byte e indica el inicio del marco API, su valor siempre es 0x7E. Datos de trama: contiene la información de la trama, incluido el tipo de trama que se envía, la dirección del origen de la trama y los datos recopilados por el dispositivo final.
Suma de comprobación: El último byte de la trama es la suma de comprobación que sirve para verificar la integridad de los datos y se calcula sumando todos los bytes de la trama API, excepto el delimitador de inicio y los bytes de longitud. A través de la interconexión de nodos que realizan diferentes funcionalidades, se pueden conectar dispositivos de hardware a servicios. El primer nodo configura el puerto serie de Raspberry Pi para leer los datos que llegan al coordinador, el segundo extrae la información relevante como origen y datos de medición actuales, el tercero confirma que no hay errores en la información y posteriormente la formatea para ingresar. en la base de datos, finalmente en el cuarto nodo se configura la conexión con la base de datos para poder direccionar los datos procesados.

Prueba del sistema
También se realizó una prueba de alcance para comprobar la calidad de la señal inalámbrica, debido a que los dispositivos que componen la WSN deben estar ubicados en una nave industrial y pueden presentarse problemas de campo de visión debido a las estructuras y maquinaria instalada. este. La XCTU cuenta la cantidad de paquetes enviados y recibidos por el módulo local y mide la intensidad de la señal de ambos lados como un valor RSSI (indicador de intensidad de la señal recibida). XCTU muestra los resultados de la prueba de rango como en la Figura 18. Los valores RSSI de los dispositivos locales y remotos se representan gráficamente, así como el porcentaje de éxito, la gráfica corresponde al número total de paquetes enviados.
En la esquina inferior derecha, se muestra el resumen de la prueba, que muestra el número total de paquetes enviados, recibidos, errores de transmisión y paquetes perdidos. El gráfico de la Figura 19 ilustra la relación entre la distancia y la intensidad de la señal del módulo local y remoto, observándose como disminuye al aumentar la distancia, debido a la disminución del RSSI el porcentaje de éxito también disminuye Figura 20, a pesar de que debido a la disminución de la intensidad de la señal, a 50 metros todavía hay más del 80% de éxito en la transmisión. El objetivo de esta prueba fue determinar el área óptima en la que colocar los dispositivos finales dentro de la nave industrial, para asegurar que no haya una pérdida significativa de información.
Instalación del prototipo en la industria y trabajo futuro
Instalación de prototipo en motores de sistema hidráulico
En tres máquinas formadoras de aluminio están instalados tres nodos sensores con tres transformadores de corriente de núcleo dividido. Figura 21, cada máquina consta de tres motores de inducción, dos de 37 kW y uno de 45 kW. En la Figura 22, la línea se monitorea con energía para cada uno de los nueve motores. Los motores están conectados a bombas de paletas, que son elementos mecánicos cuya función es crear flujo y presión en el sistema hidráulico de la máquina para realizar el trabajo. Por otro lado, el coordinador se coloca en un punto central entre las tres máquinas, cuidando de no estar a más de 20 metros de distancia para reducir el riesgo de pérdida de datos por la falta de comunicación entre los nodos sensores y el coordinador. Figura 23.
42 A continuación se muestran los Dashboards generados en Grafana donde los usuarios conectados a la red de la empresa pueden visualizar los datos. Para ello deberán ingresar en un navegador web la IP fija asignada a la Raspberry seguido del número de puerto 3000 y salir de la siguiente manera. Los datos actuales de los nueve motores monitoreados se pueden ver en el panel principal Figura 24. Mientras que las gráficas con los datos históricos se pueden ver en los paneles individuales creados para cada máquina Figura 25, en estos paneles se puede acceder a la información por fechas para ver información de días anteriores.

Trabajo futuro
44 generado, lo ubicamos dentro de la definición de "big data" el cual tiene características como volumen, velocidad, variedad, variabilidad, valor y complejidad, que resultan en nuevos desafíos [41]. Podemos distinguir dos tipos de sistemas que nos permiten procesar los datos obtenidos, los Sistemas de Gestión de Salud y Diagnóstico de Maquinaria o Sistemas de Gestión de Salud y Pronóstico (PHM) y los sistemas de máquinas autoconscientes y autoconscientes. mantener o “autoconscientes y autoconscientes” -mantener sistemas de máquinas”. El objetivo que persiguen los sistemas PHM es predecir la vida útil restante de la maquinaria (RUL); Existen dos enfoques para su cálculo, los métodos basados en modelos físicos, que describen el proceso de degradación de la maquinaria en base a modelos físicos relacionados con las propiedades de los materiales, estos modelos generalmente se generan mediante experimentos o análisis de elementos finitos entre otras técnicas.
El segundo enfoque corresponde a métodos basados en datos que intentan aprender de la información obtenida de las máquinas para realizar predicciones basadas en regresión lineal y no lineal, promedios móviles autorregresivos (ARMA), redes neuronales artificiales, sistemas de lógica difusa, etc. [42,43]. Los sistemas de máquinas autoconscientes y autosostenibles, por otro lado, tienen como objetivo proporcionar a las máquinas autonomía para que puedan evaluar de forma independiente su nivel de salud y responder en consecuencia. Así como los sistemas PHM utilizan métodos basados en datos para el autodiagnóstico, son aún más capaces de enviar esta información al sistema de control para realizar ajustes y también pueden notificar a las personas responsables de mantener su condición. planificar medidas correctivas de manera oportuna [44].
Impacto social y económico
Impacto social
Los instrumentos de medición necesarios para la aplicación del mantenimiento predictivo tienen costos elevados, representando una gran suma de inversión, alrededor de miles de dólares [6]. Por tanto, este tipo de mantenimiento sólo está al alcance de grandes industrias con el capital necesario para realizar una inversión de este tipo. Desarrollado en plataformas de código abierto, este proyecto es económico y ofrece los mismos beneficios que algunos de los instrumentos de diagnóstico actualmente en el mercado a una fracción del costo.
En consecuencia, hace que el mantenimiento predictivo esté al alcance de cualquier pequeña o mediana industria. Permitiéndote mejorar tus costos de mantenimiento e impulsar tu crecimiento, lo que sin duda te permitirá ser una mayor fuente de trabajo. Otro aspecto del impacto social se refiere a la seguridad e integridad del usuario, evitando que quede expuesto a altos voltajes, ya que existe riesgo de sufrir un accidente laboral durante la medición de corriente.
Impacto económico
Available: https://www.plantengineering.com/articles/when-it-comes-to-motors-how-hot-is-hot/. Emmanouilidis, “A Low-Cost Predictive Maintenance Approach Supporting Industry 4.0 for Small and Medium Enterprises IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), 2018. Available: https://www.edn.com/design/ systems-design/ 4440343/1/Low-powerwide-area-networking alternatives-for-the-IoT.
Rodriguez, “Wireless sensor network prototype to monitor the condition of holding furnaces in aluminum casting plant IEEE International Conference on Engineering Veracruz (ICEV), 2019. Bansal, “Issues and challenges in wireless sensor networks International Conference on Machine Intelligence and Research Progress, 2013. Liu,” Study and application of the architecture and key technologies for IOT International Conference on Multimedia Technology, 2011.
Bridging Wireless Sensor Networks to the Internet of Things IEEE/IFIP International Conference on Embedded and Ubiquitous Computing, 2010. Goudar, “Big Data: Issues, Challenges, Tools and Good Practices, Sixth International Conference on Contemporary Computing (IC3), 2013.