En este trabajo se presenta un control de monitoreo de voltaje CC para el inversor monofásico de cinco niveles, el control está basado en la técnica GPI. Por otro lado, la implementación de las señales de seguimiento utilizadas por el controlador así como de las señales portadoras utilizadas por el modulador multinivel basado en la técnica PS-PWM se realiza dentro de la FPGA.
Introducci´ on
La propuesta de topología del inversor multinivel en [5], desarrollada en 1979 y cuya idea se consolidó hasta mediados de los años 1990, introdujo un convertidor NPC (Neutral Point Clamped), cuya estructura es similar al clásico convertidor de dos niveles, pero con la adición de dos diodos por fase; Más tarde, apareció la topología multinivel de diodos de unión descrita en [6]; esta topología tenía un contenido armónico más bajo en comparación con el convertidor NPC y también propuso una nueva técnica de modulación en PWM (Pulse Ancho Modulación). La topología en cascada de los inversores multinivel tiene las ventajas de modularidad y simplicidad (todas las celdas involucradas son iguales, por lo que su construcción es modular), ventajas que no se ven en estructuras de capacitores flotantes o diodos de puerta [18].
![Figura 1.1: Comparativa del inversor cl´ asico de dos niveles y la topolog´ıa multinivel en relaci´ on a la tecnolog´ıa de semiconductor que emplean [1].](https://thumb-us.123doks.com/thumbv2/123dok_es/12423396.0/20.918.196.732.90.458/figura-comparativa-inversor-niveles-topolog-multinivel-tecnolog-semiconductor.webp)
Formulaci´ on del problema
Por lo tanto en el presente trabajo se realiza una propuesta de control de seguimiento de voltaje suave basado en la técnica GPI para el convertidor multinivel de cinco niveles en cascada con filtro de segundo orden en la salida, se implementa este controlador junto con su modulador en un dispositivo FPGA. (Xilinx Spartan-3E FPGA 1200K). La arquitectura del algoritmo controlador-modulador estará segmentada con precisión simple en coma flotante de 32 bits de acuerdo con el estándar IEEE-754, mientras que la técnica de modulación multinivel utilizada será posterior al PS-SPWM.
Justificaci´ on
Preguntas de investigaci´ on
Es posible implementar el voltaje suave siguiendo la ley de control junto con un modulador para el inversor en cascada multinivel en un dispositivo programable de campo único (FPGA). Sería posible que el inversor multinivel monofásico tuviera un factor de potencia cercano a la unidad en su carga de salida y tuviera un contenido de armónicos en corriente y voltaje muy bajo, de manera que estuviera dentro del estándar IEEE 519.
Hip´ otesis
Objetivos
Metas cient´ıficas
Aportaciones
Organizaci´ on de la tesis
Resumen: Este capítulo establece algunos conceptos importantes sobre la teoría de sistemas de control que son relevantes para la técnica de control utilizada en este trabajo; En lugar de proporcionar un análisis en profundidad de cada concepto, este capítulo intenta brindar apoyo teórico para el diseño de controladores.
Introducci´ on
La ecuación (2.6) es la forma general de representar las ecuaciones en el espacio de estados de sistemas lineales que varían en el tiempo. En el diseño de sistemas de control, el método tradicional consiste en linealizar el sistema original en uno de sus puntos de equilibrio Xe. A partir de esto, el sistema puede analizarse según los métodos de la teoría del control lineal.
Conceptos B´ asicos de Control Lineal
Todos estos conceptos básicos son parte no sólo de la teoría de control de sistemas modernos, sino también de la teoría de control de sistemas no lineales. Conceptos como vector de campo, derivada y soporte de Lie son muy importantes en el estudio de sistemas de control no lineales.
Controlabilidad y observabilidad
Definición 2 Se dice que el sistema lineal invariante en el tiempo es observable si, para cualquier tiempo t1, el estado inicial x(0) =x0 puede determinarse mediante la historia de la entrada u(t) y la salida y(t) dentro intervalos [0, t1]. En otras palabras, el sistema mostrado en (2.16) es completamente observable cuando el determinante de la matriz de observabilidad (ver ecuación (2.17)).
Planitud Diferencial
En otras palabras, un sistema de la forma (2.26) es plano si y sólo si el sistema es controlable. En resumen, si el sistema es controlable, por lo tanto es plano (para mayor referencia ver [53]).
Parametrizaci´ on Diferencial
Se supone que un sistema de la forma (2.26) tiene un polinomio en el(los) numerador(es), que puede ser constante, mientras que el(los) polinomio(s) en el denominador es un polinomio de grado ≥1. Obtener el insumo de control mediante inspección directa, debido a que puede expresarse en términos de la producción plana y sus derivadas sucesivas, es muy útil para la reconstrucción del estado.
Control Proporcional Integral Generalizado (GPI)
Existen varios usos directos de la parametrización diferencial derivados de la propiedad de planitud, pero quizás una de las aplicaciones más tradicionales y beneficiosas de la planitud diferencial se encuentra en la planificación de trayectorias para el seguimiento de control en sistemas diferencialmente planos. La parametrización diferencial proporciona naturalmente una relación explícita entre los estados y la entrada de control para lograr una planificación de ruta de salida plana; Además, permite una evaluación off-line de las condiciones nominales y las trayectorias de las entradas de control, sin resolver las ecuaciones diferenciales, estos aspectos son muy importantes en los sistemas de control y en la implementación de este trabajo.
Introducci´ on
Resumen: Los sistemas de control basados en dispositivos analógicos, a pesar de sus desventajas como desviación en sus parámetros y complejidad en su integración, se mantienen como un marco de referencia en términos de velocidad y ancho de banda, por esta razón se deben reducir los tiempos de ejecución de los controladores digitales, pero se debe preservar la flexibilidad inherente que ofrecen los diseños basados en soluciones digitales; En este capítulo se toman como foco principal los FPGA, y se hace un breve repaso del uso de este tipo de dispositivos digitales en sistemas de control. En la última década, FPGA ha tenido un gran y acelerado crecimiento, ha asumido un papel central en aplicaciones de procesamiento de diversos sistemas, ya sea en procesamiento de señales digitales, comunicación, sistemas de visión, control automático, control de motores, etc.
Historia de la tecnolog´ıa FPGA
Al mismo tiempo, una de las principales motivaciones en la construcción de controladores industriales (que se utilizan habitualmente en electrónica de potencia y control de motores), es reducir el coste de implementación; En este sentido, para que el controlador industrial tenga un precio bajo es necesario reducir el tiempo de desarrollo e implementación del controlador para reducir el time to market y además por otro lado también se debe considerar que el consumo de energía del controlador se reduce [68]. Otra limitación en el uso de FPGAs es la dificultad asociada a su integración con periféricos mixtos (analógico/digital), por lo que es necesario adaptar las señales mediante conversores analógico-digital (ADC, Analog to Digital Converter) o digital-analógico. . convertidores (DAC, convertidor digital a analógico) según corresponda para que puedan ser procesados; Actualmente, esta limitación está desapareciendo poco a poco, a medida que van entrando en el mercado FPGA que integran en su estructura conversores analógicos a digitales [74].
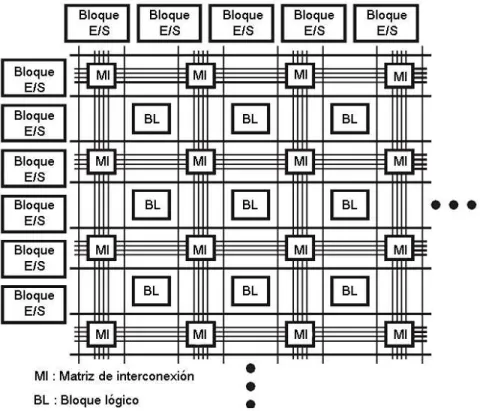
Estructura gen´ erica de un FPGA
La principal limitación de la tecnología FPGA es el costo; en comparación con los DSP y los microcontroladores, los FPGA resultan ser más caros. Actualmente, debido a que los FPGA modernos se fabrican con una alta escala de integración, tienen en su estructura interna bloques de memoria, bloques DSP, bloques de gestión de reloj y bloques de comunicación [62].
Arquitectura y tecnolog´ıas de configuraci´ on de los FPGAs
9La memoria flash es una tecnología de almacenamiento, derivada de la memoria EEPROM, que permite leer y escribir en múltiples ubicaciones de memoria en la misma operación. En el Apéndice A se muestra una breve descripción general de la tendencia de desarrollo de los recursos tecnológicos FPGA.

Introducci´ on
Resumen: Este capítulo describe el método utilizado para implementar el controlador en cuestión en el dispositivo lógico programable seleccionado; También se realiza la descripción de las tres primeras fases del diseño, que tiene que ver con el modelado del sistema dinámico, el análisis de sus propiedades matemáticas y la simulación del controlador obtenido. Posteriormente, en la segunda fase de esta metodología (siguiente capítulo), se aborda el desarrollo de la arquitectura basada en FPGA, donde se describen las tareas realizadas para la implementación en el dispositivo en cuestión.
Descripci´ on de la metodolog´ıa
Esta etapa es muy importante para el desarrollo del proyecto, ya que en ella se determina la factibilidad del diseño promedio del controlador en base a la técnica propuesta. Los pasos principales de esta fase se muestran en la Figura 4.1 y se describen a continuación (ver
![Figura 4.1: Metodolog´ıa de dise˜ no([91]).](https://thumb-us.123doks.com/thumbv2/123dok_es/12423396.0/68.918.147.771.98.492/figura-4-metodolog-ıa-de-dise-no-91.webp)
Modelado Matem´ atico
Dado que el inversor está controlado por dos señales binarias, existen 22 = 4 estados de conmutación diferentes para los propios dispositivos, que se resumen en la Tabla 4.1. Por lo tanto, existen tres valores diferentes en la salida de voltaje (V cd,0,-V cd), por eso se le llama inversor de tres niveles y en alguna literatura se le considera como inversor multinivel. [101] .
An´ alisis
La reconstrucción integral dada por (4.23) da el valor estimado del término derivada del controlador, sin tener que medir y calcular la derivada de la salida plana (señal medida, F(t) =y(t) =vC( t) Debemos recordar que las raíces del polinomio característico deben elegirse lo suficientemente a la izquierda del plano complejo para reducir el efecto de la perturbación P(t).
Simulaci´ on
La Figura 4.8 muestra los mismos parámetros que en la Figura 4.7 pero ahora con. La Figura 4.12 muestra la respuesta obtenida de la cosimulación Matlab/Simulink-PSIM.

Introducci´ on
Resumen: En este capítulo se realiza el rediseño digital del controlador a través de las restantes etapas de la metodología, selección del tiempo de muestreo, rediseño digital, descripción en lenguaje HDL, implementación, hasta finalmente llegar al rango experimental. fase de prueba que finalmente se realizó en el controlador. Continuando con las fases de la metodología seguida para realizar este trabajo, en este capítulo se explicará la implementación hardware del controlador de seguimiento GPI correspondiente al rediseño digital del controlador. La tarea se basa en las especificaciones que se muestran en la Tabla 4.3 y en las ecuaciones del controlador obtenidas en el Capítulo 4.
Partici´ on Modular
Una vez identificadas las operaciones por el algoritmo de control, se pueden procesar a través de múltiples componentes en paralelo, siempre y cuando las operaciones tengan cierta independencia entre sí. Más adelante en la fase de implementación del controlador, se creará otra partición modular específicamente en el módulo del controlador de seguimiento; Esta partición se realizará para mejorar el rendimiento del sistema operativo; El controlador se modela como una arquitectura segmentada y se describirá más adelante.
Simulaci´ on Funcional
El diagrama de bloques del módulo de interfaz de conversión analógico-digital se muestra en la Figura 5.9. El acondicionamiento de salida del inversor (vC) incluye un factor de atenuación de 64 V9 y un cambio (compensación) de voltaje de 0 voltios de 2,5 voltios (vCof f) (consulte la Figura 5.12).

Codificaci´ on HDL e implementaci´ on en FPGA
Una vez que tenemos las cuatro portadoras (T riaA, T riB, T riC y TriD) y la señal de control uAV, entran al bloque de comparación de magnitudes, este bloque está compuesto por cuatro comparadores de 32 metros. bit, dentro de este módulo se realiza una comparación de magnitudes entre la señal de control obtenida (uav) y cada una de las señales triangulares (T riaA, T riB, T riC y T riD) utilizando las siguientes operaciones: A1=uav > T riaA, B1 =uav > TriB, Cl=uav >TriC y D1=uav >TriD; Finalmente, se generarán cuatro señales PWM. El Apéndice E presenta los diagramas conceptuales que se construyeron desde un enfoque de arriba hacia abajo con la herramienta Xilinx ISE Design Suite 9.2.

Validaci´ on Experimental
La Figura 5.26 muestra una comparación para el sistema de lazo abierto y cerrado, los resultados son para THD de corriente y voltaje, además el factor de potencia muestra resultados muy similares. Prueba experimental de respuesta del sistema a un transitorio (carga no lineal) En esta prueba, se utiliza una carga no lineal que consta de un puente de diodos comercial y un motor de ventilador de CA (120 Vrms, 0,38 amperios, 60 Hz), como se muestra en la Figura 5.27; Se realizaron las mismas pruebas que en el caso lineal, los resultados se muestran en las Figuras 5.28 y 5.29.

Unidad de procesamiento
Perif´ ericos anal´ ogicos
Arquitecturas de multiprocesamiento
Herramientas de dise˜ no
Las herramientas ya mencionadas tienen la característica de que pueden asociarse con otras herramientas de simulación y depuración, por ejemplo Modelsi en el caso de simulación y ChipScope para depuración, ambas de Xilinx. Por otro lado, los fabricantes de FPGA, tratando de adaptarse a la tendencia del avance de los SoC, ofrecen herramientas de desarrollo de software, módulos IP y herramientas de personalización para sus procesadores integrados.
Introducci´ on
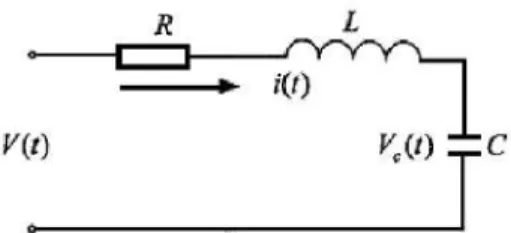
Como en cualquier filtro, el valor de la frecuencia de resonancia está determinado por los valores de L y C, mientras que el factor de calidad del filtro depende del valor de R, por tanto, la respuesta en frecuencia es independiente de la carga. Para iniciar el cálculo se puede utilizar el valor de la frecuencia de corte (Fcut) y la frecuencia angular (ω0) se puede obtener de la ecuación B.4, así:.

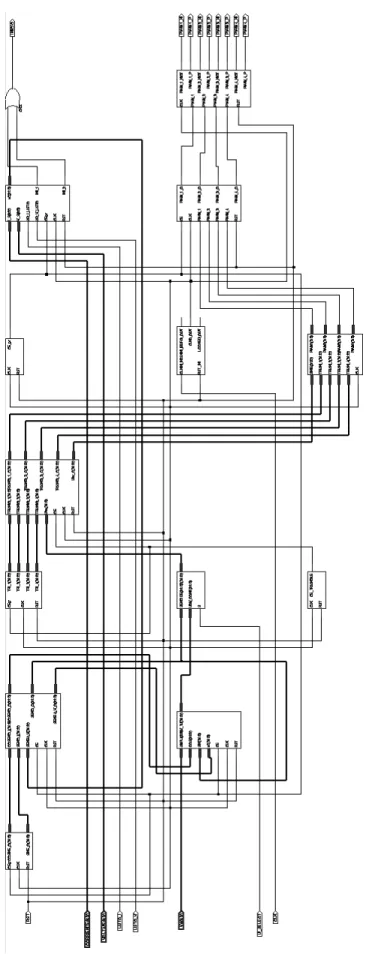
Diagrama RTL
7] Meynard, T.A.; Foch, H.; , "Multilevel Conversion: High-Voltage Choppers and Voltage Source Converters", Power Electronics Specialists Conference, 1992. 14] Peng, F.Z.; Jin Wang; "A Universal STATCOM with a Delta-Connected Cascade Multilevel Converter", Power Electronics Professionals Conference, 2004.
![Figura 1.3: Clasificaci´ on de los m´ etodos de modulaci´ on para convertidores multinivel [1].](https://thumb-us.123doks.com/thumbv2/123dok_es/12423396.0/23.918.175.745.95.437/figura-clasificaci-on-etodos-modulaci-on-convertidores-multinivel.webp)









