Cabe señalar también la falta de automatización de las empresas en la ciudad, donde aún prevalecen las operaciones manuales, y también a nivel país. El Capítulo 4 cubre la descripción de los periféricos a utilizar, los principales componentes del PPS y su diseño y construcción.
Introducci´ on
En la entrada también hay barreras infrarrojas que componen el sistema de detección de tallas. Además, en la entrada hay un mecanismo de detección del tipo (o tamaño) del vehículo implementado con tres barreras infrarrojas.

Funcionamiento
Ingreso
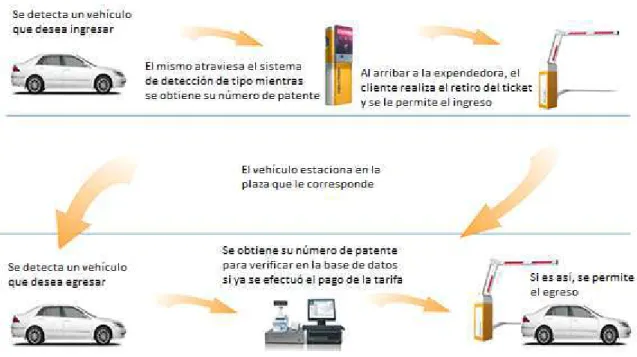
Como se muestra en la figura 2.3, el proceso comienza con la detección de un vehículo que quiere ingresar al estacionamiento. Esto da como resultado la activación de un contacto seco que se utiliza para indicarle al sistema que un vehículo está intentando ingresar al establecimiento.

Egreso
En caso de que el usuario sea abonado, el billete no se entrega porque el sistema reconoce el estado de abonado al detectar la patente. Una vez que el usuario retira el ticket, se levanta la barrera y se permite el acceso.
Relevamiento de estacionamientos
- Equipamiento disponible
- Mecanismo de detecci´ on de los veh´ıculos
- Techo y piso
- Caracter´ıstica de las v´ıas de entrada-salida
- Disposici´ on del espacio en la zona de ingreso-egreso
El equipamiento que tenían: barreras, cámaras e iluminación. Un mecanismo para detectar la llegada de vehículos. Iluminación Artificial Artificial + Natural Natural Proporción de estacionamientos Tabla 2.2: Características de iluminación de los estacionamientos inspeccionados.

Descripci´ on del estacionamiento para ajus- tes y pruebastes y pruebas
Tiene forma de pasillo con espacio para el ingreso de dos vehículos seguidos; Ellos, al igual que el suelo de cemento liso, no afectan el tiempo para fotografiar la matrícula.
Introducci´ on
El uso de un sistema que recoge datos de la matriculación de un vehículo y los almacena en una base de datos en formato texto evita la necesidad de ocupar espacio en la memoria por el almacenamiento de vídeos o imágenes y facilita la consulta de los datos de cada uno de los clientes. . del objeto en el que está montado. Describe las características generales de los sistemas ALPR (Reconocimiento Automático de Matrículas), los tipos de software disponibles, el sistema elegido, su parametrización e implementación, las características de los conjuntos de datos utilizados y las principales características del sistema implementado, tales como. procesamiento de vídeo.
Sistemas de Reconocimiento Autom´ atico de Patentes ALPRPatentes ALPR
Estado del arte
Además de las aplicaciones ya mencionadas, utiliza el reconocimiento de patentes para controlar a los clientes en gasolineras y peajes [15]. En Argentina en particular, si bien los sistemas ALPR se utilizan en algunas aplicaciones como control de flujo o emisión de boletos, no están tan extendidos como a nivel internacional.
Etapas generales de los sistemas ALPR
El objetivo de esta fase es encontrar las partes blancas de la imagen binarizada que coincidan con las especificaciones de los caracteres de la patente. Una vez detectados todos los personajes del tablero, se aíslan para su posterior identificación.
![Figura 3.1: Etapas generales de un sistema ALPR [12].](https://thumb-us.123doks.com/thumbv2/123dok_es/12317323.0/46.892.334.498.189.535/figura-etapas-generales-de-un-sistema-alpr.webp)
Descripci´ on de las patentes y los conjuntos de datos
Patentes Argentinas
Mientras que las placas del MERCOSUR tienen caracteres negros sobre fondo blanco, en el modelo antiguo ocurre al revés. En las nuevas patentes se distinguen fácilmente las letras "O" y "0", porque esta última no está completa, ya que tiene un corte en la parte superior derecha. En materia de calidad cabe mencionar que las primeras patentes emitidas correspondientes al modelo MERCOSUR presentaban defectos de fabricación.

Conjuntos de datos
Se tomaron dos imágenes a un metro del vehículo, diecisiete a dos metros y una a aproximadamente tres metros de distancia. Se tomaron seis imágenes a un metro del vehículo, seis a dos metros y ocho a tres metros de distancia. Se tomaron 3 vistas a un metro del vehículo, 6 a dos metros y 1 a tres metros de distancia.

Elecci´ on y ajuste del sistema para SAE
Software disponible
Por otro lado, se pueden encontrar sistemas libres, pero no de código abierto, como VISART [16]. Finalmente, se pueden encontrar sistemas gratuitos de código abierto, entre los que podemos destacar “OpenCV 3 License Plate Recognition” [30] y “Open-ALPR” en su versión gratuita [31]. Por eso existe la ventaja de los sistemas pagos en una amplia variedad de países, que se tienen en cuenta para el reconocimiento.
Funcionamiento de los sistemas elegidos
En el fragmento de la figura 3.21 se puede ver el resultado de esta fase para algunos de los personajes analizados. De esta forma, el sistema es capaz de obtener la información de la matrícula del vehículo que se coloca frente a la cámara [47]. Finalmente, en función de la ubicación de los personajes, el sistema los ordena y realiza un corte de la región donde se ubica el grupo en la imagen original.
Experimentaci´ on y puesta a punto de los sistemas
De forma predeterminada, este parámetro está vacío, lo que significa que el sistema debe escanear la imagen completa en busca de la patente. Aunque no se utiliza actualmente, este parámetro se modificará en el futuro. Cabe señalar que el parámetro incremento de iteración de detección (dii) es el que produce mayor impacto en el sistema, por lo que los nuevos resultados se presentan para tres valores diferentes de este parámetro.

Comparaci´ on de los modelos
En cuanto a errores, en el caso del código OpenCV cabe mencionar que el sistema es muy sensible al entorno de la imagen. Cualquier carácter o secuencia de letras concatenadas que exceda la longitud de los caracteres de la patente se considera una patente a medida que el sistema la analiza. Como puede ver en la Figura 3-30, la patente de la imagen es muy brillante debido a la forma en que incide la luz.

Conclusiones del cap´ıtulo
Un problema que ha ocurrido con ambos tipos de patentes es la aparición de una sombra sobre las mismas. Se puede observar que adaptar un sistema ALPR para modelos de patentes que no están incorporados al sistema no es una tarea trivial, ya que requiere la modificación y ajuste de una gran cantidad de parámetros. Finalmente se analizan los distintos periféricos comerciales implementados en el sistema y gestionados por el mismo.
Componentes principales
- Microcontrolador
- M´ odulo de comunicaci´ on WiFi
Para conocer el estado de las partes periféricas del sistema y utilizar dicha información para controlar la ejecución de diversas acciones se eligió el microcontrolador Atmega328P de 8 bits. De estos últimos, dos pertenecen a un puerto serie USART, utilizado para la transmisión de datos con el módulo de comunicación WiFi. En este proyecto se utiliza la UART para la comunicación con el microcontrolador, mientras que uno de los pines digitales permite implementar una señal luminosa en caso de falla.

Fuente de alimentaci´ on
Dise˜ no de la etapa l´ ogica y de comunicaci´ on
Entre los que actualmente se implementan, que son las barreras infrarrojas que forman parte del sistema de detección de tamaño y uno de los sensores magnéticos de presencia, la conexión al microcontrolador se establece ajustando los niveles de voltaje, como el de la Figura 4.5, para evitar que se dañe. Además, el Zener protege el microcontrolador en caso de inversión del voltaje de entrada, ya que solo emite su voltaje CC, que es de aproximadamente 0,6 V. En segundo lugar, para reducir el ruido que ingresa al circuito integrado, ya que el voltaje del ruido depende de la magnitud. de la impedancia de entrada.

Dise˜ no e implementaci´ on del PCB
Para verificar que el ancho de vía seleccionado fuera el adecuado, se utilizaron calculadoras del ancho de vía en función del aumento de temperatura actual y permitido. Salida de 12V DC para alimentar periféricos: las tres barreras de infrarrojos y el detector magnético. Ajustes de nivel de voltaje entre periféricos y pines del microcontrolador.
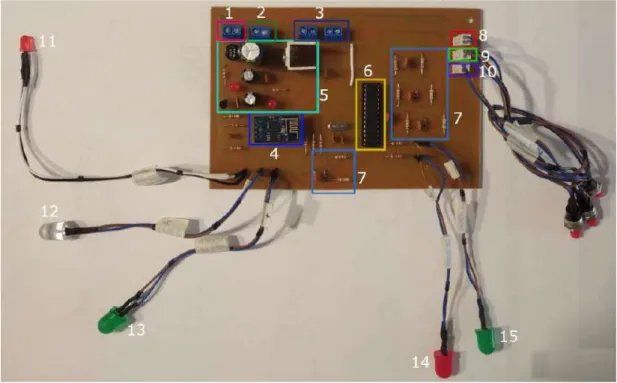
Perif´ ericos
- Barreras infrarrojas
- Detector de presencia magn´ etico
La Figura 4.7 muestra el diagrama de conexión del receptor (izquierda) y el transmisor (derecha). Mientras que este último sólo requiere una tensión de alimentación, el primero también tiene una salida de relé común y interna. En el sistema, el conector común está conectado a la fuente de alimentación, de modo que en la salida del relé queda disponible una entrada de 12V en caso de activación de la cerradura.

Introducci´ on
Prototipo inicial
Durante la realización de este prototipo se desarrollaron tres códigos en lenguaje C++, uno para la UCC, uno para el módulo WiFi y un tercero para el PPS. En primer lugar se realiza una etapa de conexión entre el módulo WiFi, el PPS y la UCC. A partir de este momento la placa y el módulo esperan a que la UCC se conecte al servidor.
Prototipo final
- Fase de conexi´ on
- Env´ıo y recepci´ on de mensajes
- V´ıa de ingreso
- V´ıa de egreso
Su primera acción es notificar a la UCC que un nuevo vehículo ha ingresado al estacionamiento. Al igual que en el modo de entrada, el sistema espera la activación del detector magnético. La patente está en la base de datos, en este caso se verifica si el cliente ya pagó la tarifa.

Conclusiones
Luego de adaptar este software a los diferentes modelos de patentes argentinas, se logró que el sistema reconociera correctamente las patentes en el 95,76% de los casos para las patentes del MERCOSUR y en el 93,94% para el modelo antiguo, en el caso de automóviles y camiones. En cuanto a las motocicletas, el porcentaje fue del 100% en el caso de las matrículas del MERCOSUR y del 90% para el modelo antiguo, con un conjunto reducido de imágenes de prueba. Además, se tomó la decisión de analizar dos alternativas diferentes (reconocimiento de matrículas OpenALPR y OpenCV 3) y luego elegir una de ellas.
Trabajos futuros
- Mejoras
- Nuevas funcionalidades
Diseño y construcción de terminal integrando UCC, en formato Todo en Uno, junto con el lector de código de barras e impresora de comprobantes fiscales. Desarrollo de un algoritmo de localización dentro del establecimiento y verificación del correcto estacionamiento. Se agregó una pantalla para mostrar el resultado de la asignación de ubicación al cliente.