La transmisión inalámbrica de sonido y datos al intercomunicador propuesto se realizará gracias a la tecnología de modulación de frecuencia. RDS es parte de la señal estéreo multiplexada, esta es la señal multiplexada que se convirtió en el estándar para FM.
![Figura 1. Sistema de intercomunicador básico [2].](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/8.918.268.738.684.999/figura-1-sistema-de-intercomunicador-básico-2.webp)
ENCENDIDO Y APAGADO DE LOS AIRES ACONDICIONADOS DE LOS
TRANSMISIÓN INFRARROJA
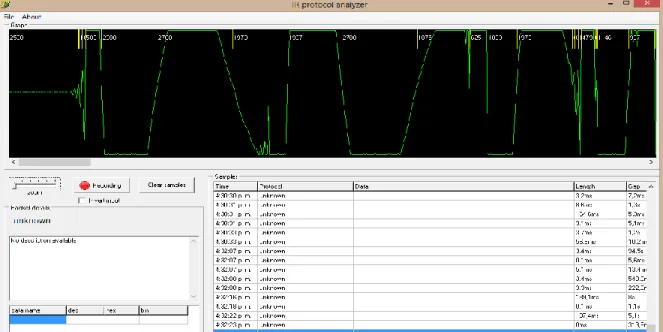
Debido a la longitud y velocidad de la señal, fue necesario utilizar varios elementos de medición como osciloscopios y software de simulación. Tiene una duración alta de 0,6 milisegundos y una duración baja de 7,2 milisegundos. Este bit cierra la transmisión de la información de la señal infrarroja. Tiempo alto para el bit durante el período de la señal, esto nos dará el número total de pulsos dentro de cada bit.
Dado que el período de la señal es de 26,3 microsegundos, los pulsos deben cumplir esta condición, por lo que deben estar altos durante aproximadamente 13 microsegundos además de bajos. Al saber acceder directamente al puerto que generará la salida de la señal, podremos determinar la programación en lenguaje ensamblador.

DIRECCIONAMIENTO DE LA VIDEOCÁMARA
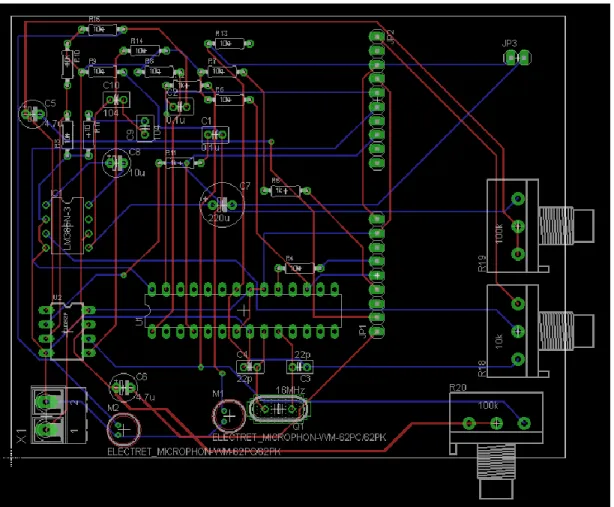
Se comienza creando un FOR para generar los 260 pulsos necesarios para el bit de inicio, al usar la función "@bsf 07.0" está escrita en lenguaje ensamblador, bsf significa ALTO, 07 es el puerto C del microcontrolador y cero es el número de puerto, ese es el puerto C0, luego se usa el comando “@nop” que permite ejecutar el comando anterior por un microsegundo, por lo que se repite 13 veces, como el pulso es de 13 microsegundos, se usan los mismos comandos para genera el segmento bajo de los pulsos, con la diferencia que el bajo se marca con el comando “@ bcf”. Si el servo está en la posición inicial, se le indica que avance hasta la posición del período en 245 sin ir más allá de ese punto. Todo esto sale por el puerto B0, lo que significa que este pin del microcontrolador contiene el servocontrol. Para girar el motor en sentido contrario se ejecuta la misma rutina, pero con signo negativo, de manera que el valor de la variable disminuye, de la misma forma, sin exceder el límite permitido por el comportamiento del servomotor. Diseño Eagle de control infrarrojo para aire acondicionado y servomotor para cámara de video en movimiento.
En el esquema podemos ver los elementos que componen el control de encendido y apagado del aire además del control del servomotor, la salida de la señal infrarroja que da el microcontrolador es de baja potencia, por lo que primero se pasa por un transistor PNP con referencia 2N3906 Para aumentar la potencia y por tanto el alcance del transmisor de infrarrojos, con el fin de conseguir una eficiencia aún mayor de la señal de infrarrojos, se instalaron dos LED de infrarrojos en paralelo, procedentes del colector del transistor y conectados a 5 voltios con una resistencia de 22 ohmios. , consiguiendo así un alcance de unos 5 metros. Para proteger el microcontrolador, se instaló un capacitor de 2200 microfaradios para evitar que el microcontrolador se reinicie cuando se arranca el servomotor.El conector de clavija llamado JP1 es donde se encuentra el módulo de radiofrecuencia para activación inalámbrica de infrarrojos o servo.
INTERFAZ DE VISUALIZACIÓN
- Videocámara
Así queda actualmente la interfaz de usuario, la cual tiene en el lado derecho unas instrucciones que describen cómo utilizar la interfaz y los elementos externos que la complementan. Para configurar el módulo FM y lograr la transmisión de información, se creó un código en lenguaje C para la plataforma Arduino, el cual se encarga de enviar la señal de entrada a través de la frecuencia seleccionada. Con ambos se genera el código binario del número resultante de la operación aritmética para generar la frecuencia de transmisión.
Conecte el receptor de la cámara de video al conector de alimentación y luego a un tomacorriente de 110 voltios, el LED de estado del receptor debería encenderse. El alcance de la señal del LED infrarrojo es muy corto, por lo que es necesario utilizar diversos métodos para aumentar su distancia, como el uso de elementos cóncavos (lupas, lentes, etc.) y reducir la resistencia que interviene en la alimentación del transmisor. .
INTERCOMUNICADOR INALAMBRICO
TRANSMISOR
El remitente debe adaptar la información para que sea apta para su transmisión. Esto sucede gracias al modulador que convierte la información a enviar en energía electromagnética. Esta modulación se puede realizar variando la amplitud, frecuencia o fase, para este proyecto se realiza una modulación de frecuencia. Se utiliza el comando SPI, este es un protocolo de comunicación que tiene el compilador que permite que el microcontrolador se comunique con otros periféricos, incluidos otros microcontroladores, esto permite una comunicación serial síncrona rápida, pero en distancias cortas esto implica que hay un “maestro” Dispositivo, en este caso el Atmega, que se comunica a través de tres líneas comunes a todos los dispositivos, MISO, MOSI, SCK y una específica para cada dispositivo SS. SPI es un bus de tres líneas a través del cual se envían paquetes de información de 8 bits.
De esta forma, el módulo de radiofrecuencia se controla a través de las líneas de comunicación MOSI (Master Out Slave In) para enviar datos, SCK (Serial Clock) para sincronizar la transferencia de información generada por el microcontrolador y SS (Slave Select) para habilitar. comunicación con el microcontrolador o no. El rango de voltaje del módulo es de 2,7 a 3,6 V. En las pruebas se encontró que el rango cambia dependiendo del voltaje de entrada. Realizando diversas pruebas y encontrando que el módulo no está dañado, se decidió aumentar el voltaje a 5, esto se comprobó ejecutando pruebas con dos módulos idénticos, uno conectado a los 3.3 voltios que suministra la placa de desarrollo Arduino, y el otro. conectado al PIC a 5 voltios, lo que produce mayor alcance y claridad de la señal, el que está conectado al PIC, mientras que ejecutar la prueba con 5 voltios conectado al Arduino dio buenos resultados sin causar ninguna degradación notable del módulo.
RECEPTOR
En la configuración, solo se seleccionan los baudios de la transmisión en serie para la interacción entre el monitor en serie y el usuario. Esta es una opción que cuenta con código para manipular la frecuencia de recepción, volumen, entre otros. Al compilar el código para recibir el módulo se establece la frecuencia de recepción, para cambiar cualquier registro o variable se debe conectar el dispositivo a la computadora y los cambios se generan desde el monitor, es decir, el receptor funciona solo como estaba diseñado, captura la frecuencia libre en la que el otro módulo transmite para la comunicación inalámbrica. Al enviar cualquiera de estas opciones por la línea serial, el microcontrolador responde a la opción, es decir, si envía un 4, el dispositivo buscará una estación por encima de la frecuencia en la que se encuentra.
Cada prototipo cuenta con módulos tanto transmisores como receptores, los cuales utilizan un solo microcontrolador, estos están ilustrados individualmente para una mejor descripción del funcionamiento de cada uno, para lograr una comunicación bidireccional que evite interferencias, un módulo opera en la frecuencia de 97.3 y el otro. en 97,5 de esta manera la comunicación es posible. Además, se ubica un botón para resetear el microcontrolador en caso de ser necesario, esto solo se debe hacer si la recepción de la señal es distorsionada o nula, esto puede ser un movimiento involuntario de la frecuencia de trabajo, por lo que al reiniciar el microcontrolador volverá a la frecuencia que es fija.

DISEÑO DE LAS TARJETAS DEL PROTOTIPO
Sólo el prototipo ubicado en la oficina del técnico de laboratorio tiene las opciones de encender o apagar el aire acondicionado. Se pueden ver los componentes que se utilizarán para este elemento, el terminal INT es donde se alimentará la tarjeta y el X2 es donde se ensamblará el servomotor. La regleta denominada JP1 es donde se conectará el receptor para comunicación inalámbrica.
La complejidad de este diseño es mayor que el anterior, por lo que fue necesario realizar las pistas en dos capas diferentes, las cuales se pueden ver con azul y rojo en la figura 39. El corazón del diseño es el microcontrolador, el elegido para este prototipo. en el Atmega 328, al no estar dentro de las librerías EAGLE, se utilizó el Atmega 128, este elemento tiene la misma cantidad de pines y la misma configuración de pines que el Atmega 328, nuevamente el bloque terminal de dos ranuras para la alimentación del Las regletas de enchufes son JP1 y JP2 son para los módulos de recepción y transmisión respectivamente, JP3 es donde se instalará el altavoz.
MANUAL DE USUARIO
Para terminar de utilizar el dispositivo, sólo es necesario cambiar la posición del interruptor eléctrico de 1 a 0 (no es necesario desconectar el dispositivo). Conecte el receptor de la cámara al convertidor RCA/USB colocando el conector macho amarillo al conector macho amarillo, el conector macho blanco al conector macho blanco. Conecte el intercomunicador a la toma de corriente de 110 voltios. Para encenderlo, cambie la posición del interruptor eléctrico de 0 a 1.
Para dejar de utilizar el intercomunicador, sólo es necesario cambiar la posición del interruptor eléctrico de 1 a 0 (no es necesario apagar el dispositivo). Para finalizar la transferencia de video, presione el botón Detener, desconecte la videocámara y el receptor.
UBICACIÓN DEL SISTEMA Y CARCASA DEL PROTOTIPO
Los marcos de señales infrarrojas para controlar elementos de sistemas como el aire acondicionado pueden ser bastante complejos ya que los fabricantes utilizan técnicas para evitar la manipulación de equipos ajenos al propio, por lo que se tuvieron que utilizar diferentes técnicas y estrategias para decodificar la señal y luego el programa. está bajo tu control. Las señales que utilizan el espectro electromagnético para su movimiento sufren perturbaciones debido a los obstáculos físicos que pueden encontrarse en el camino. Además, este tipo de señales por sí mismas no viajan largas distancias. Para solucionar esto, se utilizan estratégicamente herramientas repetidoras de señal para replicar la señal y darle mayor continuidad en el espacio. La videocámara utiliza una tecnología de transmisión de datos diferente a la de los módulos, lo que tiene consecuencias positivas como una mayor velocidad y capacidad de datos, pero también consecuencias negativas como una mayor sensibilidad a los cuerpos sólidos y una distancia más corta. La transmisión se genera en la banda de 2,4 GHz, por lo que la cámara de vídeo sólo es óptima en este prototipo para laboratorios que se encuentran cerca de la oficina, como por ejemplo laboratorio electrónico.
Los módulos tienen la posibilidad de trabajar en mono y estéreo, el prototipo está pensado para transmitir solo sonido, por lo que es preferible usar solo uno de los canales de salida de audio (derecho o izquierdo), durante las pruebas hubo problemas de interferencia al usar dos Altavoces. , por esto y como era necesario utilizar un solo canal, se optó por trabajar con un solo altavoz. En las distintas pruebas se pudo comprobar que las señales de sonido estéreo también eran bien reproducidas por el altavoz, por lo que la funcionalidad de los módulos no se deterioraba.

![Figura 3. Diagrama de bloques de un microcontrolador [10].](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/11.918.311.694.747.1015/figura-3-diagrama-bloques-microcontrolador-10.webp)
![Figura 6. Esquema del espectro de la señal MPX [13].](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/15.918.222.786.615.885/figura-esquema-del-espectro-la-señal-mpx-13.webp)
![Figura 8. Estándares más usados para la transmisión infrarroja [16]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/17.918.290.724.535.980/figura-8-estándares-usados-transmisión-infrarroja-16.webp)
![Figura 10. Planteamiento del transmisor de audio y video [21]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/20.918.170.853.665.826/figura-10-planteamiento-transmisor-audio-video-21.webp)
![Figura 11. Diagrama de bloque del sistema de control remoto de electrodomésticos [24]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/22.918.229.780.561.800/figura-diagrama-bloque-del-sistema-control-remoto-electrodomésticos.webp)
![Figura 12. Diagrama conceptual del transmisor y receptor para personas con dificultades auditivas [25]](https://thumb-us.123doks.com/thumbv2/123dok_es/12390154.0/23.918.186.843.603.782/figura-diagrama-conceptual-transmisor-receptor-personas-dificultades-auditivas.webp)