Los elementos principales de la velocimetría de punto láser (LV) fueron el uso de imágenes de doble exposición, iluminadas por un abanico de luz láser, formando las franjas de interferencia de Young. La densidad de la fuente es igual al número de partículas en un volumen de solución, y el número de imágenes superpuestas en el plano de la imagen se puede expresar en términos de ella.
Imp o rtancia
El método de traslación [1] consiste en colocar paralelos los planos de imagen de las cámaras y el plano de medición. El método de desplazamiento angular consiste en colocar los planos de imagen de las cámaras y el plano de medición en diferentes ángulos para obtener la mayor reflexión posible de las partículas iluminadas por el láser [I~].
A plica ciones
Los investigadores dicen que hasta ahora había poca información experimental sobre el flujo arterial en el aneurisma, pero hasta ahora la mayoría de las investigaciones sobre fluidos han utilizado la visualización del flujo con anemometría láser Doppl, que proporciona datos cuantitativos. Los autores encontraron que el acceso en línea a los datos del mapa de velocidad del sistema PIV era particularmente útil para obtener los datos de medición [18].
Objetivos
Los investigadores utilizan una mezcla de yodo de sodio (Na!) y glicerina para reducir la distorsión óptica y el ruido óptico en la interfaz del modelo líquido. Sin embargo, el flujo de corriente es muy diferente del medio, por lo que los datos detallados del mapa vectorial de corriente obtenidos con el sistema PlV proporcionan una nueva visión del problema.
Principios
Una instantánea de las imágenes de seguimiento del movimiento de partículas se proporciona en un sentido visual claro en la estructura del flujo. En la corriente de aire, para la siembra de partículas se utilizan habitualmente gotas de aceite en el intervalo de d l).lm a 5 ).lm. Para aplicaciones de agua, se usa comúnmente para sembrar con poliestireno, poliamida o perlas de vidrio huecas de 5).lm a 100). .lm. En general, se deben considerar 1025 imágenes de partículas en cada área de consulta.
Reso lución es pacial y ran go dinámico
El número de partículas en la corriente es de cierta importancia para obtener una buena señal de pico de correlación. Cuando se conocen el tamaño del área de interrogación, la ampliación de la imagen y el grosor del abanico de luz, podemos determinar el volumen de medición del área de muestreo.
Desa rroll o
D efini ción de las á reas de int errogación
Este problema podría resolverse mediante el relleno con ceros, es decir, el área de interrogación aumenta en ciertos límites hasta que el tamaño coincida con 211. El relleno con ceros aumentará la resolución en el plano de correlación, pero es más caro. Por tanto, los cuadrantes en el plano de correlación deben mezclarse para formar una representación continua.
Esto no es relevante si se considera que la interpolación se basa en tres puntos consecutivos en el plano de correlación. La fijación de picos también ocurre para un pico gaussiano, si el pico de la correlación es muy estrecho.

Difer- nte tipo d PIV
HPIV
Aproximadamente, se puede utilizar el trazado de rayos para determinar la relación entre las ubicaciones y la ubicación de la partícula, o una calibración general con un objetivo en la corriente[12]. Al adaptar el PIV a flujos a microescala, el volumen típico de la medición del PIV se redujo de un milímetro a 10 micrones y menos.
PITULü nI DPIV
Generación de las im ágene a r -tificiales
- E l conjunto de trazado de lín ea
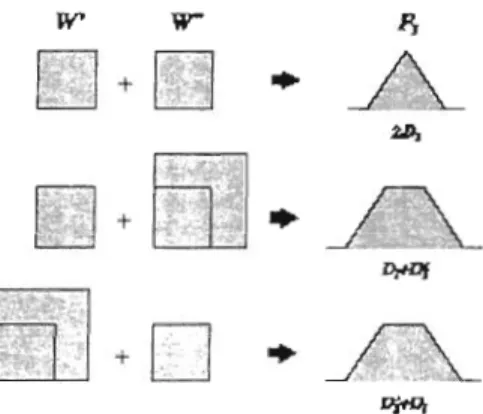
La pérdida de la correlación Fa (a) con un movimiento fuera del plano (WL1t) para (b) un ventilador de 10 luces (Z) con un perfil de intensidad uniforme. A una densidad baja de la fuente (Ns« 1), la distancia promedio entre la partícula c es mucho mayor que el diámetro de la imagen d de la partícula y la imagen en sí t n aislada - de imágenes de la partícula· a una densidad alta (Ns« 1) « 1) s » 1) la imagen se superpone y, para una iluminación coherente, el resultado de la imagen es un patrón de interferencia aleatorio, más conocido como punto [1].

Interro CTac ión
- COI-rela ción espac ial
En ese caso, aparecen tres picos dominantes: aparte de la dislocación del pico de correlación (debido a la correlación de l' con J'. Considere la dislocación del pico de correlación con un píxel de baja resolución I d, es decir, el segundo término depende en gran medida de la característica estadística del desplazamiento del pico de correlación.
La rotación de un cuerpo fijo implica un campo de dislocación más complejo que una traslación pura. Sin embargo, la curva para una intensidad de fondo aleatoria del 0 al 5 % no se ve afectada por esta medición.

- Acercam ientos po ibl es para de tecta r franja '
- A náli is de Four ier
- A uto-colTelación
- Mode lo de la forma de onda
Dividir las franjas en segmentos fuera de la parte interior de la imagen, lo que facilita la observación, se considera una posible técnica para medir la distancia de las franjas. Mastin y Ghiglia [66] explican la utilidad de la simplificación de tareas para un problema de 1-0: esto da como resultado un aumento significativo de la velocidad. Las transformadas de Fourier 2-D también se utilizan en el análisis de franjas: la imagen de magnitud se interpreta de la siguiente manera: la distancia de un pico desde el centro es proporcional a la frecuencia.
La dirección de la base de la normal I en a al origen se determina a partir del ángulo que forma el vértice con el origen I[67]. Esto se muestra como una serie de líneas en los valles (áreas más oscuras) de las líneas y se considera que corresponde entre las líneas y la configuración del punto más alto.
A lgo r " itmo de autocon"elacion
- A mbi güedad direcc ional
Las imágenes de partículas resultantes de múltiples exposiciones a IClone son indistinguibles de una imagen diseñada para la autocorrelación; e imposible saber el orden en el que se registraron las imágenes paliculares individuales. Esta tabla contiene 7 picos: pico de la misma correlación más 2 picos para cada par de imágenes de las partículas seleccionadas en tres exposiciones. Dondeqj',q)' y q)' son las magnitudes de correlación estadística de la dislocación. diferencia desde cero de los 3 picos antes de la normalización.
La función de autocorrelación asimétrica proporciona una medida de la polaridad de un vector encontrado por autocorrelación. El campo de velocidad en el flujo se puede calcular más allá de la ambigüedad direccional de una única exposición triple de imágenes PIV.
Las variaciones presentes en los campos de velocidad bidimensionales obtenidos nos permiten derivar el valor de la velocidad en la tercera dimensión. El método de correlación se basa en la hipótesis de que dentro de una región determinada se produce un pequeño desplazamiento del fluido sin deformación ni rotación. Por tanto, si realizamos la correlación entre las dos imágenes, la ubicación de su máximo indicará el desplazamiento del líquido con respecto a la posición inicial.
Los tres términos del lado derecho de la ecuación (l03) son, respectivamente, la transformación, la rotación y el elemento biaxial. Por tanto, no es muy preciso determinar la dislocación sin considerar la rotación y algunos términos.

Materiales
Diagrama de ubicación de piezas de PCl-1407.. r ranura de extensión en una computadora. Vigila las salidas. La PC]-1407 utiliza un buffer FIFO de 4 KB para almacenar temporalmente la imagen transferida a la memoria del sistema de la PC. El búfer almacena toda la línea de vídeo durante la captura de imágenes.
El P 1-1407 puede realizar transferencias continuas de una imagen o fragmentos individuales de memorias intermedias. La señal generada por el C'1 C puede ser utilizada por otros dispositivos para adquirir una imagen o sincronizar varias cámaras.

- G I'áficos de OSLO
- Tareas típica de ODE V
- Ventana s d e ODE V
- Pr og ram ación co n NI-IMAQ VIs
- Definición de una image n de Digital
- Ca racte .-ística s de una ima gen di gitalizada
- Resolución De la Imagen
- Definición(tipos) De la Imagen
- Paleta de control de IMAQ-V lS lO N
- U tilidad e D e V is ión
- Conceptos de la transformada rápida de Fo urier
- Repre sen tación de FFT
- Pr orama de mu tr o d imáo ene
Además, es posible editar una imagen en el dominio de la frecuencia manipulando su espectro de frecuencia. Muchos VI de adquisición requieren que usted proporcione un búfer de imagen para recibir la imagen capturada. La definición de una imagen indica la cantidad de cortinas que puedes ver en la imagen.
Representa la frecuencia de las variaciones de intensidad de la luz en el dominio espacial. Hay dos representaciones posibles de la transformada rápida de Fourier de la imagen: la representación estándar y la representación óptica. El término con valor, o frecuencia cero, se encuentra en la esquina superior izquierda de la imagen.
De forma predeterminada, cuando muestra una imagen compleja, el nivel de tamaño de la imagen compleja utiliza la representación óptima.

Pruebas preliminares
Al dividir las 2 imágenes en tamaños de 32 x 32 píxeles, realizamos una correlación cruzada para formar una imagen completa con un tamaño de imagen real de 7,2. El esquema general de correlación cruzada es fragmentar 2 imágenes, aplicarles correlación cruzada, obtener la correlación máxima y formar vectores con estas imágenes obtenidas, para formar mapas vectoriales. A continuación se muestra una figura del esquema de proceso de un DPIV. Se pueden ver burbujas rojas a medida que pasan a través del abanico de luz, y este reflejo de la luz nos ayudará a tomar imágenes con la cámara CCO que se muestra al fondo de la imagen de la derecha, que captura la intensidad de la luz. Láser (puntos rojos que aparecen en las imágenes) al pasar las burbujas.
Fotografías digitales del movimiento de las burbujas tomadas por la cámara CCD y manipuladas por el programa LabVI W, los foros tienen diferencia horaria. Aplicación de correlación cruzada a una secuencia de imágenes en las Figuras 7.2] con un tablero respectivo para indicar los parámetros y dónde se almacenarán.

Conclusiones sobre el DPIV
La intensidad máxima de la imagen de partículas debe ser alta, sin llegar al pICO saturado (es decir, igual a 4095). La separación de tiempo entre imágenes debe ajustarse a la regla de 1/4 para el tamaño inicial del área de consulta. D igual que las coordenadas del objeto proyectado en el plano de la imagen correspondiente a la ecuación (121).
Para simplificar el análisis se utiliza la matriz de proyección en perspectiva de la cámara, lo que requiere el uso de un sistema de coordenadas proyectivo en lugar del cartesiano, lo que permite linealizar el sistema. Para medir el campo de velocidades, debemos medir el desplazamiento de la partícula en una región del espacio.