Diseño, Implementación y Verificación de un Sistema de Hardware Reconfigurable para Aplicaciones de Control
63
0
0
Texto completo
(2) DISEÑO, IMPLEMENTACION Y VERIFICACION DE UN SISTEMA DE HARDWARE RECONFIGURABLE PARA APLICACIONES DE CONTROL.. MONOGRAFIA PARA OPTAR AL TITULO DE INGENIERO EN CONTROL. Tutor del proyecto ALDEMAR FONSECA. UNIVERSIDAD DISTRITAL “FRANCISCO JOSÉ DE CALDAS” FACULTAD TECNOLÓGICA, INGENIERÍA EN CONTROL BOGOTÁ DC 2016.
(3) CONTENIDO JUSTIFICACION. 1. INTRODUCCION. 2. OBJETIVOS 2.1. General 2.2. Específicos. 3. ESTADO DEL ARTE 4. MARCO TEÓRICO. 5. METODOLOGIA Y PLANEACION 5.1. Planeación. 5.2. Metodología 5.2.1. Interfaz gráfica. 5.2.2. Algoritmo de reprogramación de los bloques 5.2.3. Estructura de hardware básica que permita modificaciones en sus bloques. 5.2.4.. Aplicación de la planta de nivel.. 6. DESARROLLO DEL HARDWARE RECONFIGURABLE 6.1. Desarrollo de la interfaz gráfica y simulación de la estructura básica. 6.2. Desarrollo del algoritmo de programación del micro controlador. 6.3. Desarrollo del hardware de estructura básica. 6.3.1 Características de los módulos OPAMP..
(4) 6.3.2 Características de los módulos PGA. 6.3.3 Características de los módulos ADC 6.3.4 Características de los módulos DAC 6.4. Cálculos realizados. 6.4.1. Cálculos amplificadores con ganancia 6.4.2. Cálculos constantes de integración (parte 1) 6.4.3. Cálculos constante integración (parte 2) 6.4.4. Cálculos constante derivativa (parte 1) 6.4.5. Cálculos constante derivativa (parte 2) 6.4.6. Cálculo sumador 6.4.7. Cálculos restador. 6.5. Aplicación en la planta. 6.5.1. Válvula de control proporcional 6.5.2. Sensor de nivel ultrasónico 6.5.3. Sensor de nivel de presión diferencial 6.5.4. Válvulas de apertura de líquido 6.5.5. Tanques de la planta 6.5.6. Prueba con la planta sin controladores. 7. RESULTADOS 7.1. Interfaz gráfica. 7.2. Algoritmo de reprogramación 7.3. Aplicación de la estructura básica en los micros controladores. 7.3.1. Resultados del bloque proporcional PGA. 7.3.2. Resultados del bloque integral. 7.3.3. Resultados del bloque derivativo.. 7.4. Aplicación en la planta de nivel. 7.4.1. Prueba en lazo abierto..
(5) 7.4.2. Prueba en lazo abierto con circuito de corriente. 7.4.3. Prueba en lazo cerrado.. 8. Consideraciones 8.1. Sumador digital. 8.2. Posibles combinaciones. 8.3. Configuración de Parámetros adicionales. 8.3.1. Conversor USB-RS232. 8.3.2. Inicio de Matlab 8.3.3. Mensajes de advertencia 8.3.4. Reconfiguración de PSoC 8.3.5. Diagrama de los circuitos finales. 9.. CONCLUSIONES.. 10.. BIBLIOGRAFÍA..
(6) JUSTIFICACION El proyecto desarrollado y documentado plantea la solución de ciertos inconvenientes encontrados, como lo es la falta de similitud entre la simulación y el montaje de sistemas que operan señales o sistemas, el montaje de circuitos y la búsqueda de componentes que en muchos casos no se encuentran o son costosos y por ultimo pero no menos importante la falta de aplicación de estos en diferentes plantas de trabajo que se encuentran en la academia De tal manera que los resultados del proyecto los cuales fueron documentados y delimitados tanto en sus resultados como en los campos de trabajo donde se pueden aplicar, como es el caso de la interfaz gráfica que se desarrolló en un software cuyo entorno, permite simular y reprogramar el sistema planteado. El sistema reprogramable que se planteó desde la interfaz gráfica evita el hecho que se busquen componentes o circuitos de cierta complejidad para realizar algún tipo de práctica, como ejemplos la derivación de una o más señales o la resta de dos señales para su posterior inversión de magnitud. Permitiendo que el hardware con el que se cuenta permita obtener resultados satisfactorios. Como se ha dicho anteriormente los sistemas se plantearon se hicieron con el fin de obtener la aplicación de. un lazo de control en algún tipo de planta que. mostrara los resultados, puesto que se observó la oportunidad por tiempo y distancia se utilizó la planta de nivel de líquidos AMATROL.. 1.
(7) 1. INTRODUCCION Este proyecto busca ampliar el espectro desarrollado por el grupo de trabajo (González M. & Rodríguez S.). Que exploro aplicaciones de. los sistemas. reprogramables en el procesamiento de señales análogas utilizando los módulos análogos y digitales de cierta gama de micro controladores de la empresa cypress, por lo cual se toman los análisis y comprobaciones documentados en el proyecto, para plantear nuevos objetivos, además de establecer un nuevo marco de trabajo tanto en la reconfiguración del sistema físico como en la interfaz que mostrara con que elementos se cuentan. Permitiendo la realización de un sistema de hardware reconfigurable para aplicaciones de control. En la actualidad los sistemas basados en hardware reconfigurable o no reconfigurable, que se desarrollan para aplicaciones específicas se conocen como sistemas embebidos, sistemas que pueden analizar o controlar solo un proceso (ej. frenos ABS), estos sistemas que se desarrollan para enfoques y tareas muy determinadas, se deben reconfigurar para poder aplicarse a nuevos procesos, o adaptarlos a alguno ya existente para que se puedan aprovechar de la mejor manera. Basados en la idea de desarrollar e implementar un sistema embebido que se enfoque específicamente en el control de nivel de líquidos, se plantea el objetivo principal del desarrollo de un software, que permita la simulación y la reprogramación de ciertos módulos análogos y digitales de un hardware, dicho hardware se basa en la lógica de un lazo de control cerrado, que además permitirá que el diseño planteado habilite una gama de posibilidades con la combinación de cada uno de los módulos utilizados. De tal forma que el plantear un sistema embebido donde las simulaciones y la reprogramación sean compatibles, requiere que el diseño se implemente en un hardware que sea reconfigurable además de ser bastante confiable en sus resultados para poder verificar el sistema implementado.. 2.
(8) Como se ve en muchos casos la cantidad de circuitos que se encuentran en las fuentes bibliográficas, los cuales ilustran las configuraciones establecidas para realizar algún tipo de bloque de control (proporcional, integral o derivativo), pueden ser fáciles desde el punto de vista teórica, pero si se analiza el tiempo que toma la búsqueda del montaje, la realización y la comprobación, se observa que el tiempo aumenta en cierta medida, además de tener en cuenta que muchos de los resultados teóricos se hacen con base en componentes que no existen como es el caso de condensadores y resistencias que además de poseer valores no comerciales el tamaño y la alimentación de los circuitos integrados que se utilizan para obtener el resultado es otro factor importante que no se tiene en cuenta. Por tanto todas las fases de diseño y metodología se establecieron para determinar qué tipo de interfaz sería la más adecuada, junto con la mejor manera de simular y reconfigurar los módulos necesarios para realizar las prácticas de verificación donde el tiempo que toma el realizar una práctica sea corto. Estas verificaciones que se hacen con todos los módulos establecidos en la lógica de control de lazo cerrado se documentan las respuestas obtenidas y los parámetros que se pueden modificar. Como los objetivos. establecidos no solo se enfocan en el diseño e. implementación de un sistema de hardware reconfigurable de dos PSOC para aplicaciones de control, con señales de laboratorio, sino también en la implementación y obtención de resultados en la planta de nivel de líquidos AMATROL.. Puesto que esta planta contiene cierta cantidad de sensores y. procesos que permiten realizar prácticas para el montaje y verificación en tiempo real, esto. permite realizar una documentación del funcionamiento del sistema. tanto en lazo abierto como en lazo cerrado con y sin algún tipo de control. De tal forma que el desarrollo planteado permite la verificación de resultados de manera individual y conjunta, de cada uno de los objetivos establecidos en el proyecto, concluyendo al final que los resultados obtenidos podrán ampliarse mucho más si se continúa ampliando márgenes de trabajo e investigación.. 3.
(9) 2. OBJETIVOS 2.1.. General. Diseñar, implementar y verificar un sistema de hardware reconfigurable para aplicación en un sistema de control de nivel de líquidos de la planta amatrol.. 2.2. . Específicos. Diseñar una interfaz gráfica desde Simulink que permita la reconfiguración de bloques a partir de una estructura de modelo análogo básico.. . Diseñar e implementar un algoritmo que permita la reconfiguración de un hardware de los bloques análogos de un sistema de hardware básico interconectado con 2 Psoc.. . Diseñar e implementar el hardware de estructura básica que permita la reconfiguración de los bloques análogos de 2 Psoc con los acoplamientos de voltaje y corrientes junto con conectores de entradas y salidas apropiados. . Aplicar y verificar el sistema diseñado en un control de nivel de líquidos de la planta amatrol de la facultad tecnológica.. 4.
(10) 3. Estado del Arte En la actualidad los sistemas de simulación son en su mayoría ideales, entendiéndose simulación como una herramienta de depuración que permite representar mediante software el comportamiento de un sistema, permitiendo verificar fácilmente los errores en el funcionamiento del mismo, al tratarse de un software, el comportamiento de los sistemas simulados no es idéntico a la realidad, esto se debe a que están limitados a la configuración predefinida de sus componentes, lo que hace imposible que se puedan tomar en cuenta características físicas como el material de fabricación de los elementos y agentes externos como la temperatura y señales parasitas, que alteran e influyen en gran proporción en el resultado obtenido, generando así un alto porcentaje de error en la relación de los resultados prácticos y de simulación, tomando en cuenta estas falencias en el proceso de simulación es necesario optar por la implementación de un emulador, entendiendo que el emulador es una herramienta que consiste en un complejo sistema electrónico controlado por un software, el cual tiene como función reproducir el funcionamiento y las características reales del sistema a emular (Palacios, Remiro, & Lopez, 2006.). A continuación se presenta una recopilación de artículos relacionados con el desarrollo e implementación de un emulador enfocado en el software Simulink de Matlab, estos dan una base teórica para la solución y desarrollo del proyecto, dando una idea de la utilización de Matlab, Simulink y PSoC permitiendo divisar las distintas formas de manejo tanto de software como hardware para así poder analizar y seleccionar la metodología más adecuada para la solución al problema (MathWorks, 2012), (The MathWorks, “MATLAB - The Language of Technical Computing”, 2012.), (Joven club de computacion de Cabaiguan). Gracias a la versatilidad del software Matlab y de las herramientas que contiene, como Simulink, este es usado para distintas aplicaciones en los proyectos, entre las más destacadas se encuentran la interfaz gráfica, cálculo, diseño y simulación de sistemas (Palacios, Remiro, & Lopez, 2006.). Al revisar los artículos encontrados se encuentra la utilización de Matlab por distinto autores, para 5.
(11) distintas funciones, por ejemplo los autores Domínguez, Rodríguez y Ruíz en su diseño de un sistema de digitalización de señal, utilizan el System Generator de Xilinx junto con Simulink para generar el código necesario para implementar la FPGA en el proyecto, con el uso de System Generator, los autores lograron generar que el código del programa tuviera un nivel de abstracción más alto, así como la reducción de tiempo en la generación de dicho código; adicionalmente los autores aprovecharon el software Matlab para la creación de la interfaz gráfica (Dominguez, Rodriguez, & Montero , 2010). Paralelamente los autores Gómez y Cerquides usan Matlab/Simulink para la creación de la interfaz de usuario para su simulador de radar, así como el desarrollo de los cálculos matemáticos necesarios para el tratamiento de las señales que intervienen en el radar, con la utilización de Matlab los autores lograron la reducción de los tiempos de simulación ya que la interfaz les permite tomar los datos necesarios en un periodo comprendido en el rango de los milisegundos (Gomez Almadana , 2007). Por su parte los autores Jiménez y Pachin usan System Generator y Simulink conjuntamente para el diseño e implementación desde Matlab de un modulador y demodulador N-QUAM sobre una FPGA de Xilinx (Jimenez Nuñez & Panchi Campos , 2011). Otro proyecto basado en la utilización de System Generator y Simulink, es la Simulación e implementación en FPGA de un esquema de codificación del canal sujeto al estándar de Wimax (Interoperabilidad Mundial de Acceso por Microondas) en donde usan conjuntamente estos software para implementar el código de programa en la FPGA Spartan 3E-Starter (Nuaymi, 2007), (XILINX, 2006), (Marzo Icaza & Estrada). En el diseño del sistema embebido para el procesamiento de señales ultrasónicas, los autores Cabrera y Velazco utilizaron Matlab para simular el comportamiento de las señales ultrasónicas desde el momento en que son emitidas hasta el momento de la recepción por el sistema. Para la implementación de dicho sistema los autores utilizaron PSoC, una tecnología desarrollada por Cypress Semiconductor enfocada al desarrollo de los microcontroladores, creando una integración entre un bloque análogo y un bloque digital, los cuales pueden interactuar y dar así una mayor variedad de opciones a la hora de programar (Joven club de computacion 6.
(12) de Cabaiguan), los autores en este caso utilizan específicamente el bloque análogo de PSoC para el acondicionamiento de la señal permitiendo así tener una mayor facilidad de incorporar mejoras en el sistema ya que el tratamiento de la señal se hace prácticamente en su totalidad dentro del PSoC (Cabrera-López & Velasco-Medinaa, 2011). En el desarrollo de un emulador fotovoltaico para el testeo de inversores se usó el software Simulink para realizar el código en bloques funcionales que luego son traducidos a lenguaje C con la ayuda de Real Time Workshop (RTW) (GUI), adicionalmente hacen uso de Embedded IDE Link una ToolBox de Simulink que permite implementar el código directamente en un microcontrolador (Mathworks), (Miguel Espinar, 2011). En la Universidad Autónoma de Occidente, Cali Colombia, con el fin de realizar un control adaptativo de uno de los procesos del laboratorio de automática se utiliza PSoC por el autor Argote implementando el uso de algoritmos bioinspirados (C.E. Borges, 2011), obteniendo como resultado un mejor control de los procesos (Fuertes, 2011). Por su parte el autor Guerrero utiliza una FPAA y el bloque análogo del PSoC para lograr el diseño de filtros analógicos con frecuencias de trabajo superiores a 100KHz, con la implementación de estas tecnologías el autor logra generar los algoritmos necesarios para el diseño de los filtros (J. J. Cabrera-López, 2007). Así mismo para la implementación de filtros FIR (M. MARTÍNEZ, 2009). Los autores Torres, Padrón y Hernández del la Universidad Central de las Villas utilizan los sistemas programables PSoC (Torres, Padron, Hernandez, & Taboada). En la universidad nacional de la Patagonia los autores Colombo y Rogel implementan el uso de sistemas reconfigurables PSoC para el diseño e implementación de un anemómetro ultrasónico 3D (Montoya Walter), logrando la reducción del número de componentes externos, mejoras en la velocidad de operación, costos y en general el tiempo de ejecución del proyecto (Montoya Walter). Con respecto al tema de los emuladores, en la Universidad Abierta de Cataluña el autor Bas Gago implementa el emulador de un microcontrolador PIC 16F84 basado en una FPGA, el autor utiliza MPlab para desarrollar el código de funcionamiento el cual es leído por Emulpic una interfaz de usuario desarrollada 7.
(13) por el autor en Microsoft C++.NET (Palacios, Remiro, & Lopez, 2006.), desde esta plataforma se logra también la comunicación con la FPGA y el control del emulador ya implementado en la misma (Bas Gago, 2010). En la Universidad Distrital FJDC los autores Delgadillo y Pirajan hacen uso de una FPAA en complemento con PSoC para realizar una aproximación a un sensor inteligente reconfigurable y autoadaptable al ambiente (Angel Augusto Custodio Ruiz, 1999), con la implementación de estas tecnologías en el desarrollo del proyecto los autores logran que el sistema sea totalmente reconfigurable en menos de 2 segundos, que tenga un control manual y un control por software, así como una flexibilidad entre entradas y salidas (Delgadillo & Piraján ). Los autores Arnal y Bono en el diseño de un sistema de control para un cortacésped, utilizan PSoC para el procesamiento de las señales provenientes de diferentes sensores que verifican el comportamiento del cortacésped, esto para tener una idea de cómo se está comportando este y prevenir posibles fallas, analizando los datos provenientes de los sensores en una interfaz gráfica hecha en Matlab (Herguedas & Nuez). Un proyecto similar al anterior realizado en la Universidad Nacional de la Patagonia, enfocado principalmente a censar la temperatura a diferentes profundidades del mar, esto con el objetivo de tener un análisis detallado de la biodiversidad presente en la zona donde estén ubicados los sensores, en este proyecto los autores Costa y Pujana además de la utilización de PSoC emplean un módulo Xbee Pro para comunicar el sistema de procesamiento de señal con la PC (Morales Insignares, Orozco Charrys, & Gamarra Acosta, 2014). En el desarrollo del simulador de un esquema de modulación y demodulación OFDM utilizando un modelo de canal multitrayectoria, entiéndase por OFDM (Multiplexación por División de Frecuencias Octogonales) (Costa, y otros), los autores Vergara y Estrada hacen uso del software Simulink de Matlab para el diseño y análisis de un sistema de comunicaciones de banda ancha inalámbrico, basado en el estándar IEEE 802.16 (Jimenez, Parrado , Quiza, & Suarez). Los autores Urbina y Martínez por su parte hacen uso de PSoC para procesamiento de señales, Matlab para ayuda de soporte a las pruebas realizadas al proyecto y Labview para generar la interfaz de usuario en su implementación de 8.
(14) un electro miógrafo enfocado principalmente hacia usuarios cuadripléjico (Vergara Gonzalez, 2008), (Instruments). Para la evaluación del movimiento en tiempo real y sus aplicaciones la autora Mota implementa circuitos bioinspirados sobre un PSoC, evaluando el algoritmo descrito en Matlab (Urbina Rojas & Martinez Santa, 2012) (Mota Fernandez, 2007-08). En la implementación de un sistema que permita el control del flujo de líquidos y gases, y por medio de chips haga un reconocimiento de los clientes de las estaciones de gasolina los autores Contreras y Montaña usan PSoC para el sistema de control y principalmente utilizan su. módulo RFID para el. reconocimiento de clientes (egomexico). Para medir los parámetros básicos del funcionamiento de las baterías de litio, estado de carga (SoC) y estado de salud (SoH) (Electropedia, Electropedia), (Electropedia, Electropedia), Ferrer usa un circuito que introduce una señal sinusoidal en las baterías, procesando la señal obtenida por medio de un PSoC, analizando el cambio de fase de la señal ingresada, este cambio de fase es debido a la impedancia interna de la batería, posteriormente genera la visualización del nivel de SoC de la batería en una LCD. Con el fin de optimizar el diseño en el nivel de cargas dentro de un encaje protésico para amputaciones a nivel transfemoral el autor Espinosa usa las herramientas computacionales Solid Edge, Algor, LabView, Matlab, SimiMotion para simular el comportamiento de las fuerzas involucradas en el interior del encaje protésico, para la implementación del encaje se usa PSoC para la adquisición, conversión y análisis de datos de calibración (Gutierrez Olivar, Lambas. Perez,. Pascual. Albarracin,. &. Vazquez. Gallego,. 2005/2006),. (AUTODESK.COMMUNITY), (simi reality motion systems), (Espinosa Ocampo, 2012). Luego de realizar una análisis de los diferentes documentos que hablan sobre las aplicaciones nos solo de PSOC sino también de las aplicaciones que permite MATLAB en los diferentes sistemas emulados y en varias de sus herramientas, se establece que la mejor manera de realizar el proyecto, es dividir en bloques todo el proyecto de tal manera que se puedan realizar fases de avance que permitan al final entrelazarse en uno solo sistema que no solo reconfigure el hardware sino 9.
(15) que también genere una simulación de cada una de las posibilidades del proyecto, permitiendo. de. esta. manera. que. se. obtenga. resultados. concretos. y. documentables de tal manera que utilizando la herramienta SIMULINK de MATLAB se puedan generar las simulaciones, además de establecer una comunicación con el PSOC para la reconfiguración. Así como se ve en varios proyectos, que los resultados de una simulación en MATLAB son bastante confiables, se establece que la división del proyecto en bloques dejara por último la comprobación de los resultados en la planta de nivel de líquidos de tal forma que los resultados que se obtengan de los montajes en el laboratorio no serán lejanos a la realidad encontrada en el montaje.. Marco legal: Decreto 3942 de 25 de Octubre de 2010: Este decreto se enfoca a la protección del derecho de autor, y favorece a los titulares del derecho de autor dando un control a la explotación de sus creaciones, aprovechándolas económicamente (Ministerio del interior y justicia, 2010). Decreto 4835 de 2008: Regular el cumplimiento de las normas que protegen el derecho de autor y hacer una inspección y vigilancia a las sociedades de gestión colectiva del derecho de autor, estableciendo la estructura de las mismas y las funciones de los administrativos (Ministerio del Interior yJusticia, 2008). Decreto número 1360 de 1989: Reglamenta que el soporte lógico (software) es incluido en el Registro Nacional del Derecho de Autor, explicando los elementos que contiene y especificando los requisitos para diligenciarlo (Ministerio de Gobierno de colombia, 1989).. 10.
(16) 4. Marco teórico. El planteamiento de un sistema embebido que se basara en la teoría de lazo de control cerrado, proyectando la aplicación directa del diseño en una planta de control de nivel de líquidos, se puede prestar para muchas interpretaciones, como lo es el caso de aquellos sistemas que no son reconfigurables por software, sino que de quererse realizar modificaciones al diseño establecido, se deberán modificar componentes físicos generando riesgos de algún posible daño, por lo cual el sistema que se reflejó en los objetivos establecidos a alcanzar, se planteó como un hardware que tuviera una estructura básica reconfigurable, donde se pudieran obtener resultados variables por medio de la modificación de parámetros ya establecidos por software. De esta manera, para poder modificar todos los bloques del micro controlador además de poder obtener resultados en tiempo real sin la necesidad de realizar modificaciones físicas que necesitaran obligatoriamente que el usuario removiera componentes al circuito ya establecido, se implementó una interfaz gráfica que involucrara no solo la posibilidad de modificar parámetros dentro del micro controlador sino también que realizara una pequeña simulación que ilustrara al usuario, esta interfaz gráfica se realizó en el entorno MATLAB, el cual además de contar con herramientas que hacen posible la simulación de sistemas con diversas características, también permite establecer líneas de comunicación con otras plataformas de desarrollo. (Arce & Vianna Raffo, 2009), (Moore, 2007). Por tal motivo el establecer que lazo de control y que parámetros se establecerían desde MATLAB fue la primera etapa en el bloque de la interfaz gráfica. Entre muchas de las teorías de control el proyecto se basó en la teoría de control convencional en la cual el análisis de una entrada y una salida permite automatizar ciertos procesos, como es el posicionamiento de sistemas mecánicos, o el control de flujos o nivel de agua, de tal forma que el sistema que se diseñó e implemento desde MATLAB, contiene las características comúnmente presentadas en un lazo cerrado de control, “Un ejemplo de un diagrama de bloques de un sistema en lazo cerrado. La salida C(s) se realimenta al punto de suma, donde se compara con la entrada de referencia R(s). La naturaleza en lazo cerrado del sistema se indica 11.
(17) con claridad en la figura. La salida del bloque, C(s) en este caso, se obtiene multiplicando la función de transferencia G(s) por la entrada al bloque, E(s). Cualquier sistema de control lineal puede representarse mediante un diagrama de bloques formado por puntos de suma, bloques y puntos de ramificación” (Ogata, 2010). Una vez se establece en que entorno de programación y que características se tendrán en cuenta para la simulación y programación del hardware, se establece que la siguiente línea de trabajo será la implementación del diseño, en un micro controlador CY8CKIT-059 PSoC® 5LP. Debido que presenta mejoras significativas con respecto a sus antecesores, ya que cuenta con una tecnología de fabricación que permite la modificación de los módulos análogos y digitales internos, de esta manera no solo se cuenta con una herramienta que por su estructura interna permite implementar por completo todos los puntos que se utilizan en un lazo cerrado de control, sino que también por la tecnología ARM implícita en su fabricación permite que se reconfigure. internamente sin la necesidad de. desmontar el micro controlador del sistema implementado. (Cuadros Acosta, 2011). Cumpliendo de esta manera con todos los bloques establecidos para el diseño y puesta en marcha del proyecto debido a que la interfaz gráfica permitirá verificar no solo la información técnica de lo que se está modificando en el sistema de hardware sino que también permitirá visualizar que tipo de sistema se obtendrá con dichos parámetros. Por tanto la implementación del sistema en la planta AMATROL de nivel de líquidos permitirá la verificación del sistema diseñado, teniendo en cuenta que los voltajes y corrientes de la planta son bastante altos, por lo cual se deben diseñar acoples y protecciones adecuadas evitando que algún tipo de daño bien sea en el pc donde se implementa la interfaz gráfica o en el micro controlador.. 12.
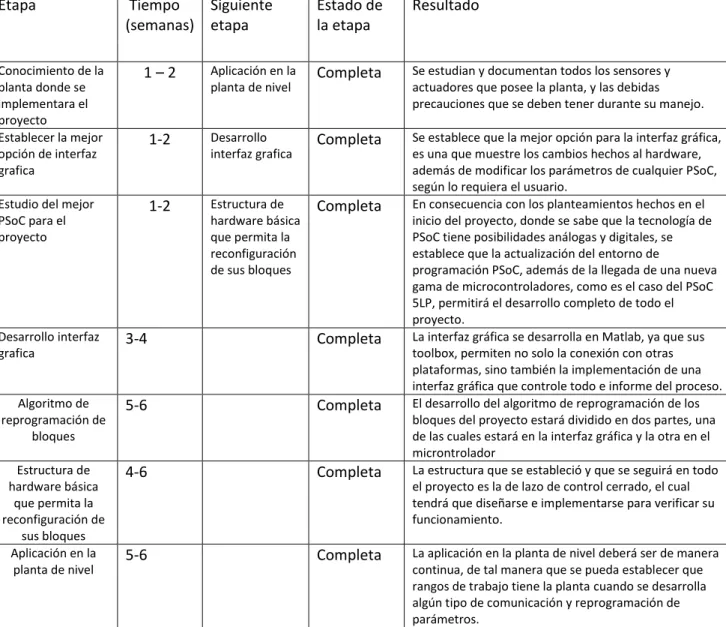
(18) 5. Planeación y Metodología. 5.1.. Planeación.. Con el fin de establecer la mejor manera para el desarrollo e implementación del proyecto se plantea un cronograma de conocimiento y trabajo continuo. Para cumplir con todos los objetivos planteados, se establece por medio de un diagrama de Gantt (Angulo Aguirre, 2013), el cual se muestra a continuación. Etapa. Conocimiento de la planta donde se implementara el proyecto Establecer la mejor opción de interfaz grafica. Tiempo Siguiente (semanas) etapa. Estado de la etapa. Resultado. 1–2. Aplicación en la planta de nivel. Completa. Se estudian y documentan todos los sensores y actuadores que posee la planta, y las debidas precauciones que se deben tener durante su manejo.. 1-2. Desarrollo interfaz grafica. Completa. 1-2. Estructura de hardware básica que permita la reconfiguración de sus bloques. Completa. Se establece que la mejor opción para la interfaz gráfica, es una que muestre los cambios hechos al hardware, además de modificar los parámetros de cualquier PSoC, según lo requiera el usuario. En consecuencia con los planteamientos hechos en el inicio del proyecto, donde se sabe que la tecnología de PSoC tiene posibilidades análogas y digitales, se establece que la actualización del entorno de programación PSoC, además de la llegada de una nueva gama de microcontroladores, como es el caso del PSoC 5LP, permitirá el desarrollo completo de todo el proyecto. La interfaz gráfica se desarrolla en Matlab, ya que sus toolbox, permiten no solo la conexión con otras plataformas, sino también la implementación de una interfaz gráfica que controle todo e informe del proceso. El desarrollo del algoritmo de reprogramación de los bloques del proyecto estará dividido en dos partes, una de las cuales estará en la interfaz gráfica y la otra en el microntrolador La estructura que se estableció y que se seguirá en todo el proyecto es la de lazo de control cerrado, el cual tendrá que diseñarse e implementarse para verificar su funcionamiento.. Estudio del mejor PSoC para el proyecto. Desarrollo interfaz grafica. 3-4. Completa. Algoritmo de reprogramación de bloques. 5-6. Completa. Estructura de hardware básica que permita la reconfiguración de sus bloques Aplicación en la planta de nivel. 4-6. Completa. 5-6. La aplicación en la planta de nivel deberá ser de manera continua, de tal manera que se pueda establecer que rangos de trabajo tiene la planta cuando se desarrolla algún tipo de comunicación y reprogramación de parámetros. Tabla 1: Diagrama de Gantt sobre la planeación del proyecto.. Completa. 13.
(19) 5.2.. Metodología. 5.2.1. Interfaz gráfica. La interfaz gráfica junto con la simulación tienen por objetivo principal, el desarrollo de una herramienta que permita predecir resultados por medio de la simulación de alguna combinación de la plantilla desarrollada, además de brindar una interfaz que reprograme los módulos del micro controlador PSoC, sin la necesidad de ir a la plataforma de programación PSoC creator, permitiendo así mejorar el tiempo de desarrollo en algún tipo de proyecto. Por esta razón ese establece una plantilla de predefinida, donde se tenga claro que módulos son con los que cuenta PSoC, y que posibilidades de combinación de operaciones se tiene, debido a que se. utilizaran dos microcontroladores. PSoC, se proyecta que los resultados obtenidos en uno se duplique, y además que la interfaz permita la programación de cualquiera de los dos, sin la necesidad que el usuario modifique parámetros de manera física, si no que la interfaz permita la reprogramación de cualquiera de los módulos en alguno de los PSoC. Con respecto a la interfaz y la simulación en la herramienta, Simulink, se tendrá en cuenta el hecho que los resultados obtenidos podrán ser lo más cercanos a las simulaciones, ya que los resultados obtenidos a partir de simulaciones tienen la característica de ser ideales en todo sentido, pero en el caso de un microntrolador el cual cuenta solo con voltajes de alimentación entre 3.3v 5v, no se podrá esperar salidas de voltaje superiores a los voltajes de alimentación.. 5.2.2. Algoritmo de reprogramación de los bloques Uno de los objetivos es diseñar una interfaz que permita la reconfiguración de los bloques de PSoC sin la necesidad que el usuario realice modificaciones físicas, si no que mediante una interfaz que le genere y le informe que parámetros son los que tiene disponible y que además le informe que valores no son permitidos en el micro controlador, se debe tener en cuenta que el código que se generara tanto en MATLAB como en PSoC debe tener alguna manera de comunicarse y de interactuar, por lo cual se plantea usar un protocolo USB puesto que el micro controlador y el pc tienen estos puertos, de esta manera se puede establecer algún tipo de protocolo de comunicación que sea adecuado y eficaz. 14.
(20) Sin descartar algún tipo de cambio o mejora en el protocolo de comunicación final, con el único objetivo que las necesidades de hardware que el usuario llegue a tener, sean informadas modificadas y realizadas por medio de la interfaz gráfica.. 5.2.3. Estructura de hardware básica que permita modificaciones en sus bloques. Siguiendo con la línea de desarrollo esperada, se establece el uso de los micro controladores PSoC, debido a la alta cantidad de módulos digitales y análogos que posee sin olvidar que cada una de sus familias posee mejoras significativas con respecto a la anterior, por lo cual se harán pruebas con varias de ellas y se establecerá cual es la mejor opción para el desarrollo del proyecto, teniendo en cuenta la facilidad que tenga para la comunicación con la interfaz gráfica, la cantidad de módulos que se puedan utilizar y modificar entre muchas otras opciones que permitan un desarrollo adecuado del proyecto. De tal manera que se pueda establecer que estructura básica será la más adecuada para el proyecto. Como el micro controlador y las funciones del resultado final del proyecto pueden tener malas interpretaciones, se implementaran protecciones y acoplamientos adecuados en todas y cada una de las entradas y de las salidas de los micros controladores utilizados.. 5.2.4. Aplicación de la planta de nivel. Uno de los objetivos finales del desarrollo completo del proyecto es la aplicación práctica del mismo en alguna plataforma que permita visualizar la variación de parámetros físicos sin la necesidad de algún accionamiento manual, por medio de establecimiento de algún lazo de control que permita la realimentación de valores y la modificación de otros. Se escoge la planta de líquidos puesto que tiene variedad sensores y de propuestas de trabajo ya que posee dos tanque interconectados cada uno con un nivel diferente y dos sensores de nivel, uno de presión hidrostática y otro ultras-sónico y una válvula de control proporcional, por lo cual uno de los estudios llevara a establecer cuál de las herramientas de la planta será la mejor opción de trabajo.. 15.
(21) 6. Desarrollo del Software y el Hardware reconfigurable.. Como el planteamiento hecho desde el principio donde se explica que bloques se esperan del proyecto se desarrolla una metodología por bloques, con la finalidad de obtener resultados separados que al final se puedan unificar en un solo proyecto.. 6.1.. Desarrollo de la interfaz gráfica y simulación de la estructura básica.. Con el propósito de establecer que estructura de hardware básica sería la más adecuada se hicieron varias consultas y lluvias de ideas, donde se estableció que los elementos -empleados en forma paralela, encontrados en un lazo cerrado de control son los más utilizados por los estudiantes tanto en simulación como en montajes de laboratorio, esto quiere decir que usualmente un estudiante simulara un integrador o un proporcional y se sumaran los resultados obtenidos, por lo cual no se encontró información o respuestas donde un estudiante utiliza más de un integrador o más de un bloque proporcional. De esta manera se establece que el lazo de control tradicional (figura1), en el cual se utilizan; 1 restador, 1 bloque proporcional (P), 1bloque integral (I), 1 bloque derivativo (D), 1 boque de suma. Es la estructura básica a realizar desde la interfaz hasta la aplicación en forma de hardware.. Figura1: modelo de lazo de control paralelo.. 16.
(22) Por lo cual se establece el desarrollo de una estructura básica en Simulink (figura2), que permita visualizar posibles resultados del hardware,. frente a. entradas de cierto tipo en los implementos de laboratorio.. Figura2: Estructura básica implementada en Simulink.. Esta estructura básica de Simulink será controlada por la interfaz gráfica desarrollada en GUI, de tal manera que se puedan variar los parámetros desde la interfaz, con el pleno conocimiento de que valores se tienen o se pueden modificar. La interfaz gráfica (figura3), cumplirá dos funciones esenciales que serán la reprogramación de los bloques de los microcontroladores y la generación de una simulación que permita visualizar que resultados se pueden obtener con los valores establecidos anteriormente. Figura3: Interfaz gráfica modelo inicial.. 17.
(23) 6.2.. Desarrollo del algoritmo de programación del micro controlador.. Debido a que se pretende la reprogramación de los bloques de PSoC desde una interfaz gráfica que pueda generar además una simulación, el algoritmo encargado de esa tarea tendrá como finalidad la comunicación de MATLAB con los micro controladores, de manera que se pueda reprogramar los bloques adecuados si la necesidad de realizar modificaciones físicas, por lo cual se utiliza el protocolo de comunicación USB para comunicar directamente las ordenes generadas por código desde MATLAB, para ejecutarlas en el micro controlador, pero debido a problemas propios de procesamiento de PSoC el protocolo USB no demuestra resultados satisfactorios, además que el entorno de programación de PSoC (PSoC creator), se actualiza de la versión 3.1 a la versión 3.3, generando cambios en la estructura de comunicación, que a pesar de ser consultado por varias fuentes bibliográficas no se encuentran los resultaos esperados. Por lo cual se opta por usar un protocolo de comunicación compatible con PSoC y Matlab, este resulta ser el protocolo de comunicación serial RS232, con el cual Matlab solo necesita de 4 líneas de código (figura4), para realizar la comunicación y la reconfiguración de los módulos de PSoC. s1=serial('COM10','BaudRate',115200,'Parity','none','DataBits',8,'StopBits',1); fopen(s1); fprintf(s1,'D'); fclose(s1);. Figura4: Líneas de código básicas para envió de datos desde MATLAB a los micro controladores.. La primera prueba del protocolo se realiza con el software HERCULES (figura5), el cual demuestra que los datos que se envían desde MATLAB son compatibles con el protocolo de comunicación y que además permite él envió de datos hacia PSoC.. 18.
(24) Figura5: Software Hércules el cual se utiliza para verificar el funcionamiento del conversor RS232 .. Como el algoritmo de programación se divide en dos partes ya que una parte que se encuentra en el código de MATLAB que envía los datos que el usuario desea reprogramar y la otra en PSoC donde se recibirán los datos y se modificaran los bloques que se requieran, también en PSoC se utiliza un bloque específico para la comunicación (figura6), donde se configuran los parámetros procedentes del código en MATLAB.. Figura6:. Bloque UART configurado a 115200 bps, velocidad que también se configura en MATLAB.. Cuando se implementan los dos fragmentos del código se realiza una prueba donde el micro controlador PSoC prende y apaga el led indicador que tiene cuando se colocan valores superiores a 0 en el bloque proporcional de la interfaz gráfica. Como se digo anteriormente los datos que se envían desde MATLAB llegan al micro controlador por medio del bloque UART, el cual permite la comunicación de manera continua y además acepta los valores que se requieren para su reprogramación total o parcial, además como el micro controlador posee dos. 19.
(25) bloques UART, el segundo se utiliza para la reconfiguración del segundo micro controlador.. 6.3.. Desarrollo del hardware de estructura básica.. Como se mencionó antes se utilizara la estructura básica de un lazo cerrado de control para la aplicación de los datos obtenidos desde SIMULINK y GUI de MATLAB, por lo cual se indaga sobre varias familias de PSoC con el fin de establecer cuál es la mejor opción para el desarrollo del proyecto, y se llega a la conclusión que la mejor opción es la última familia de PSoC la familia de la gama 5, debido a la facilidad de la comunicación y la variedad de módulos encontrados en su hardware, como es el caso de los bloques OPAMP, y los bloques PGA y UART, además de ser completamente compatible con la última actualización del entorno de programación PSoC creator 3.3, en varias referencias anteriores se estudió la posibilidad de utilizar el psoc3 el cual viene en formato de tarjeta de desarrollo y no de microcontrolador, pero debido a las actualizaciones de PSoC creator se generaron problemas con su protocolo de programación por lo cual se optó por el psoc5LP. En la tabla1 se enumeran los módulos necesarios para el proyecto y los proporcionados por el micro controlador, datos proporcionados por el entorno de programación de PSoC. Módulos necesarios 4 OPAMP 2 PGA 2 UART 2 ADC 2 DAC. Módulos disponibles psoc5LP 4 OPAMP 4 PGA o 4 PGA INV 4 UART 2 ADC 4 DAC. Tabla1: Lista de módulos necesarios para el proyecto y lo módulos disponibles el micro controlador de PSoC.. 6.3.1 Características de los módulos OPAMP. Los módulos OPAMP de PSoC son módulos que proporcionan un bloque de funcionamiento análogo a partir de un entorno digital, en muchos de los foros que hablan sobre PSoC se encontró que la aplicación más usual es la de modo seguidor donde se encuentran excelentes resultados al momento de hacer 20.
(26) seguimiento a una señal de entrada con parámetros variables, pero en el caso del proyecto se utilizaran estos módulos para realizar operaciones de integración, derivación, suma y resta de señales.. Figura7: Modulo Opamp de PSoC, cuyas entradas se configuran análogas por el propio entorno de desarrollo.. 6.3.2 Características de los módulos PGA. Los módulos PGA figura10, son perfectos para el funcionamiento en modo proporcional de tal manera que se puede multiplicar una señal por una constante multiplicativa y la salida será una señal con un valor proporcional establecido desde PSoC, debido a la estructura interna que maneja PSoC las ganancias que se pueden obtener son; *1 *2 *4 *8 *16.. Figura8: Modulo PGA de PSoC, Vref debe ir a tierra y vin será cualquier señal.. 6.3.3 Características de los módulos ADC Se encuentra como valor adicional el hecho que los módulos ADC de PSoC (módulos de conversión análogo digital), funcionan prácticamente de manera lineal donde se puede configurar la cantidad de muestras que se toman y en qué momento se pueden accionar, por lo cual se agrega una parte digital al proyecto donde se pueden sumar o multiplicar señales, pero no de manera análoga si no de manera digital por medio de los bloques ADC.. 21.
(27) Figura9: Conversor Análogo Digital.. 6.3.4. Características de los módulos DAC. Como todo resultado obtenido, a partir de los módulos ADC, debe mostrarse en algún modulo conversor de datos digitales a análogos se utiliza el módulo DAC, el cual permite la salida análoga de datos de PSoC con la característica que el voltaje del módulo no será superior a 4.08v.. Figura10: Conversor Digital Análogo.. 6.4.. Cálculos realizados.. Entre los cálculos desarrollados para escoger los diferentes componentes para obtener los modos de control deseados se encuentran los cálculos realizados a partir de la información obtenida de la configuración de los modos de control en amplificadores. operacionales,. entre. los. cuales. se. encuentran. aquellos. configurados con condensadores y resistencias y que además tienen voltaje de alimentación dual (+12 -12). Por este motivo se reemplazan los valores de referencia y se agrega un nivel offset a los módulos análogos OPAMP de PSoC.. 6.4.1. Cálculos amplificador con ganancia Una de las aplicaciones más importantes en un amplificador operacional es la característica de multiplicar las señales de entrada por una constante preestablecida obteniéndose a la salida una señal con las mismas características 22.
(28) de frecuencia pero con una amplitud diferente. Como lo muestra la simulación realizada la señal en amarillo es la misma señal de entrada y en azul la señal de salida la cual obedece a la fórmula 1, la cual permite establecer que la ganancia del circuito es 1, debido a que la resistencia RF y la resistencia R tienen el mismo valor. 𝑉𝑜 = − (. 𝑅𝐹 ) ∗ 𝑣𝑖 𝑅. Formula1: Formula de un amplificador en modo inversor. Figura11: Simulación de un amplificador con ganancia 1 (circuito).. Figura12: Simulación de un amplificador con ganancia 1 (Resultado).. 23.
(29) 6.4.2. Cálculos constante de integración (parte 1) La constante de integración que se puede obtener utilizando amplificadores operacionales, resistencias y condensadores, permite realizar la operación a cualquier señal de entrada, el resultado dependerá si la constante calculada es adecuada para la señal. Como se en la fórmula 2. 𝟏. V𝑜 = − (R∗C) ∗ 𝑣𝑖 Formula2: Ganancia de integración.. De tal manera que los resultados obtenidos estarán dados por la variación del potenciómetro digital, el cual ira de 0 ohm a 100.000 ohm, dando como resultado una variación de la constante de integración entre 100000 y 1, por supuesto entre la ganancia 100000 y la ganancia 1, existe la posibilidad de no pasar por ciertas ganancias las cuales están dadas por la variación del potenciómetro digital. Por medio de las especificaciones técnicas se observa que la variación del potenciómetro es de 40ohm por lo cual se obtiene la siguiente tabla (tabla2): Resistencia (ohm). Capacitancia. 𝟏. Resultado constante integral ( (R∗C)). (microfaradios) 0. 10. 100000. 40. 10. 2500. 80. 10. 1250. 120. 10. 833.33. 160. 10. 625. 200. 10. 500. ….. …... ……. 99840. 10. 1.0018. 99880. 10. 1.0012. 99920. 10. 1.0008. 99960. 10. 1.0001. 100 000. 10. 1. Tabla 2: tabla de las ganancias integrales esperadas mediante la variación potenciómetro digital X9C104P.. 24.
(30) Figura13: Simulación de un amplificador en modo integral (Circuito).. Figura14: Simulación de un amplificador en modo integral (Resultado).. 6.4.3. Cálculos constante integración (parte 2) Con el objetivo de ampliar las posibilidades que se pueden obtener con la conmutación de diferentes switchs y relés se establece el diseño de un sistema que permita sumar capacitancias del mismo valor permitiendo ampliar el rango de posibilidades, de tal forma que no solo se tendrán los valores de la tabla 2, si no que se amplía el rango de trabajo como se muestra en la fórmula 3 y sus correspondientes resultados en la tabla 3: 𝟏. V𝑜 = − ((R∗(C+C))) ∗ 𝑣𝑖 Formula3: Formula de un amplificador en modo integrador con dos condensadores de igual valor.. De esta forma se muestra con la fórmula 3 como se pretende ampliar la gama de posibilidades en el controlador integral, que permite determinar los valores. al. aumentar la capacitancia del circuito, en la figura 15, se observa la base teórica de este procedimiento. 25.
(31) Figura15: Explicación del aumento de capacitancia en paralelo. (Fuente: física universitaria sears zemansky). De tal manera que los resultados obtenidos estarán dados por la variación del potenciómetro digital, el cual ira de 0 ohm a 100.000 ohm, esto multiplicado por el valor de los capacitores sumados (C+C). Por medio de las especificaciones técnicas se observa que el resultado calculado al realizar la variación del potenciómetro la cual es de 40ohm por lo cual se obtiene la siguiente tabla (tabla3):. Resistencia (ohm). Capacitancia. 𝟏. Resultado constante integral (R∗(C+C)). (microfaradios). 0 40 80 120160 200 …. 99840 99880 99920 99960 100 000. 20 20 20 20 20 20 ….. 20 20 20 20 20. 100000 2500 1250 833.33 625 500 …… 1.0018 1.0012 1.0008 1.0001 1. Tabla 3: tabla de las ganancias integrales esperadas mediante la variación potenciómetro digital X9C104P.. 26.
(32) Figura16: Simulación de un amplificador en modo integral (Circuito).. Figura17: Simulación de un amplificador en modo integral (Resultado).. 6.4.4. Cálculos constante derivativa (parte 1) El valor de la constante derivativa que se pretende implementar en el microcontrolador está dada por la fórmula 5. 𝑉𝑜 = −( (R ∗ C) ∗ 𝑣𝑖) Formula 5: Formula de un amplificador en modo derivador.. Al igual que en el cálculo de la ganancia integral, la ganancia derivativa se ve implicado el hecho que el sistema depende del valor del potenciómetro digital, el cual varia en pasos de 40 ohm. Por lo cual se calculan los siguientes valores tabla4.. 27.
(33) Resistencia (ohm). Capacitancia. Resultado constante integral (R ∗ C). (microfaradios) 0. 10. 0.00001. 40. 10. 0.0004. 80. 10. 0.0008. 120. 10. 0.0012. 160. 10. 0.0016. 200. 10. 0.002. ….. …... ……. 99840. 10. 0.9984. 99880. 10. 0.9988. 99920. 10. 0.9992. 99960. 10. 0.9996. 100 000. 10. 1. Tabla 4: tabla de las ganancias derivativas esperadas mediante la variación potenciómetro digital X9C104P.. Figura18: Simulación de un amplificador en modo derivador (Circuito).. 28.
(34) Figura19: Simulación de un amplificador en modo derivador (Resultado).. 6.4.5. Cálculos constante derivativa (parte 2) Con el propósito de ampliar las posibilidades en la constante derivativa se siguió el procedimiento de la constante integral, en este caso la constante derivativa se aumentara de igual manera, con un capacitor en paralelo. 𝑉𝑜 = −( (R ∗ (C + C)) ∗ 𝑣𝑖) Formula 6: Formula de un amplificador en modo derivador, agregando un capacitor en paralelo al circuito.. Al igual que en el cálculo de la ganancia derivativa con un solo capacitor, el sistema depende del valor del potenciómetro digital, el cual varia en pasos de 40 ohm. Por lo cual se calculan los siguientes valores tabla5.. Resistencia (ohm). Capacitancia. Resultado constante integral (R ∗ C). (microfaradios) 0 40 80 120 160 200 …. 99840 99880 99920 99960 100 000. 10 10 10 10 10 10 ….. 10 10 10 10 10. 0.00001 0.0004 0.0008 0.0012 0.0016 0.002 …… 0.9984 0.9988 0.9992 0.9996 1. Tabla 5: tabla de las ganancias derivativas esperadas mediante la variación potenciómetro digital X9C104P.. 29.
(35) Figura18: Simulación de un amplificador en modo derivador (Circuito).. Figura19: Simulación de un amplificador en modo derivador (Resultado).. 6.4.6. Cálculos sumador El modo sumador de un amplificador operacional se puede obtener de dos formas, la forma de sumador inversor y la de no inversor, después de analizar varias fuentes bibliográficas se concluye que la mejor opción para el proyecto es la no inversora puesto que no involucra muchos componentes y no requiere recalcularse sus valores de referencia si las señales de entrada cambian.. Figura20: Simulación de un amplificador en modo sumador (Circuito).. 30.
(36) Figura21: Simulación de un amplificador en modo sumador (Resultado).. 𝑽𝒐 = − (𝑹) ∗ (. (𝑽𝟏) (𝑽𝟐) + ) (𝑹𝟏) (𝑹𝟐). Formula7: Formula de un amplificador en modo sumador. 6.4.7. Cálculos restador En un lazo de control cerrado el bloque restador es una parte importante puesto que permite la comparación de dos señales, en el caso del restador con voltajes de funcionamiento entre 0v y 5v el voltaje v2, es la que marcara la pauta para la salida, debido a que no hay posibilidad de obtener resultados con valor negativo. Este resultado negativo seria el resultado de restar una componente v2 mucho menor a la componente v1.. Figura22: Simulación de un amplificador en modo Restador (Circuito).. 31.
(37) Figura23: Simulación de un amplificador en modo Restador (Resultado).. 𝑽𝒐 = 𝑽𝟐 − 𝑽𝟏 Formula8: Amplificador operacional en modo restador. 6.5.. Aplicación en la planta.. En el caso de la planta de nivel la cual cuenta con varios modos de operación y de trabajo, se realiza una prueba y se tabulan todos los datos obtenidos cuando la planta está en funcionamiento, pero se encuentran varias características las cuales permiten establecer los siguientes parámetros de funcionamiento.. 6.5.1.. Válvula de control proporcional. Se utilizara la válvula de control proporcional la cual funciona de 0 a 40 mA, con lógica inversa, esto quiere decir a que a mayor corriente menor apertura de la misma, esta válvula cuenta con la característica que a 90Kpa se cierra completamente a una corriente de 20 mA, por lo cual el rango de trabajo será de 0 a 20 mA, teniendo en cuenta los acoples de necesarios para su funcionamiento evitando daños.. Figura24: Válvula de control proporcional.. 32.
(38) 6.5.2. Sensor de nivel ultrasónico El sensor ultrasónico de nivel que se encuentra en el segundo tanque de la planta entrega los siguientes valores mínimos y máximos cuando el tanque está lleno 19.3 mA y si está vacío 3.9 m, lo cual es ideal para la realimentación de un lazo de control. Figura25: Sensor de presión diferencial.. 6.5.3. Sensor de nivel de presión diferencial El sensor de presión diferencial también entrega valores en corriente, pero no es ideal puesto que su valor mínimo es de 6.4 mA y su valor máximo es de 14.2 mA, indagando por las razones que sucede esto se encuentra con características para un tanque de mayor proporción, por lo cual sería necesario realizar un circuito se trasforme el valor minio en 4 mA y el valor máximo en 20 mA, por razones de facilidad en el circuito se opta por descartar el uso de este sensor.. 6.5.4. Válvulas de apertura de liquido Como la planta funciona como un lazo cerrado el cual permite que el líquido recircule continuamente desde el tanque de almacenamiento pasa por la tubería y la válvula proporcional hasta llegar al tanque donde se encuentran los sensores de nivel, y ciertas válvulas manuales y digitales permiten que el líquido vuelva al tanque inicial. Estas válvulas funcionan con 24v de tal manera que presentan total apertura o total cierre, por lo cual no se puede variar la salida proporcional del líquido, de esta manera se opta por usar una válvula de apertura manual que se graduara de. 33.
(39) manera que en estado de nivel estable el flujo de entrada sea igual al de salida, permitiendo un nivel estable.. 6.5.5. Tanques de la planta Los tanques de almacenamiento de líquido son dos y uno de ellos se subdivide en otros dos por lo cual se puede decir que se tienen 3 tanques donde dos de ellos cuentan con sensores de nivel, y por efecto de gravedad las válvulas de apertura permiten la recirculación del líquido al tanque de almacenamiento, debido a esto el líquido se pone en circulación gracias a una bomba de nivel de líquido que funciona a 24v.. 6.5.6. Prueba con la planta sin controladores Estableciendo un lineamiento para observar el funcionamiento de la planta de nivel se realizan varias pruebas en lazo abierto, con el objetivo de establecer el comportamiento que tiene la planta con controladores que modifiquen el funcionamiento. Señal de entrada. Actuador (válvula proporcional). Variación de nivel en el tanque. Figura 24: Estructura de prueba en lazo abierto de la planta de nivel. Esta prueba muestra que la planta funciona de manera continua cuando la válvula proporcional la cual se alimenta de manera neumática, está abierta a cierta capacidad, de tal forma que se permita la recirculación del líquido por todo el lazo de circulación, se evidencia además que la planta no tiene ningún método de control integrado, sino que simplemente si está encendida la bomba de recirculación de líquido, la planta sirve y dependiendo de qué nivel de aire tenga esta, así mismo funcionara. Además se evidencia que el actuador de la planta funciona con lógica inversa es decir, que entre más corriente tenga la válvula, su apertura se disminuirá hasta estar totalmente sellada, pero si no hay presencia de corriente en la válvula la apertura será total.. 34.
(40) 7. Resultados. Referente a los resultados obtenidos con el desarrollo del proyecto se encuentra la diversidad de operaciones que se lograron obtener, no solo de manera análoga sino también de manera digital ya que a pesar de la cantidad de líneas de código y de los módulos implementados, el procesamiento interno de PSoC permitió ampliar la gama inicial de operaciones.. 7.1.. Interfaz gráfica.. En el desarrollo y las pruebas preliminares a la interfaz gráfica se encontraron diversas herramientas que permitieron estructurar una interfaz que además de reprogramar internamente la estructura establecida de los microcontroladores, también se logró establecer parámetros de simulación acorde con la realidad, de tal manera que el usuario puede establecer una pequeña simulación basado en las posibilidades reales con las que cuenta en PSoC.. Figura26: Interfaz gráfica implementada.. Aprovechándose de esta manera la capacidad que tiene MATLAB para la transmisión de datos, cuando se cuenta en simulación con los valores preestablecidos en la estructura básica de control, y si los valores son acorde con los que el usuario cuenta también se tiene la capacidad para reestructurar el hardware, sin la necesidad de hacer configuraciones físicas externas, permitiendo de esta manera que el usuario cuente con herramientas no solo análogas, sino también con opciones digitales. 35.
(41) Figura27: Estructura para la toma de datos para la simulación o la programación.. La interfaz gráfica final permite simular o reprogramar los dos microcontroladores con alguno de los valores que el usuario necesite, de esta manera se cuenta con dos simulaciones aparte y con varias posibilidades de reprogramación de hardware, en el caso del panel donde el sistema simula la aplicación de. la. estructura básica de control, que en este caso es la planta de nivel de líquido amatrol. t5552,. se. simula. a. partir. de. una. función. de. transferencia. (elisamanuelcristina), que tiene unos parámetros físicos parecidos al de la planta, debido a que se pueden producir errores humanos en la aplicación del proyecto se estableció que si el usuario utiliza la opción planta, el controlador 1 deshabilitara su funcionamiento y se dedicara exclusivamente al lazo de control, evitando así que el usuario tenga alguna señal conectada al micro controlador, pudiendo generar daños al proyecto. Pero si el usuario desea tener el lazo de control habilitado y además la posibilidad de utilizar el segundo micro controlador podrá hacerlo, de esta manera se tendrán varias opciones en el sistema que se pueden verificar en el hardware, como lo muestra la figura25.. Figura28: De izq. a der. Selección de los parámetros del controlador, Simulación de los parámetros y resultado en el osciloscopio de MATLAB.. 36.
(42) 7.2.. Algoritmo de reprogramación. Debido a que el algoritmo de reprogramación debía estar en dos partes puesto que se reconfigura el hardware a partir de los valores que el software a través de la interfaz gráfica acepte, por tal motivo el estudio previo de las posibilidades de comunicación que posee PSoC y que fueran compatibles con MATLAB, permitió que se obtuviera un resultado satisfactorio tanto en la pruebas básicas de comunicación como en las pruebas finales. Como el bloque UART permitió establecer una comunicación continua y sin percances la reconfiguración de los bloques de PSoC es posible en cualquier momento de la simulación o montaje. Permitiendo que el usuario tenga tanto la opción de utilizar los bloques de dos lazos de control, como la posibilidad de utilizar un lazo de control diseñado para la planta de nivel de líquido y un lazo de control extra para utilizarlo en algún evento que crea conveniente, además de las posibilidades digitales de suma y multiplicación que cada uno de los bloques le permite.. 7.3.. Aplicación de la estructura básica en los microcontroladores.. Debido a que las opciones que se pueden obtener de PSoC, se hacen por medio de sus diferentes arreglos internos que permiten utilizar la capacidad conmutada para la reconfiguración de parámetros en el. micro controlador, hizo posible. obtener varios resultados sin la necesidad de variar parámetros externos o físicos en el micro controlador, si no que por medio de comandos de software se variaron parámetros que generaron resultados satisfactorios de acuerdo al proyecto. El procedimiento establecido para la obtención de resultados de cada uno de los bloques, fue establecer un lazo de control cerrado en el cual se pudieran variar por separado los parámetros del bloque proporcional, el bloque integral o el bloque derivativo dejando los bloques de suma y resta como se muestra en la figura 27, donde se observa que el bloque restador opera la señal de entrada junto con una señal de valor cero de tal manera que se puede realizar un seguimiento a la señal 37.
(43) de entrada, esta señal de entrada es operada por alguno de los bloques de control y la salida llega al sumador el cual solo tiene que sumar esta señal de tal manera que se observa que la señal es igual antes del sumador como a la salida del mismo. Señal de referencia. +/-. Controlador. Sumador. Salida. P I D 0 Figura29: Estructura utilizada para obtener resultados individuales de cada controlador.. 7.3.1. Resultados del bloque proporcional PGA. El bloque PGA de PSoC permite hacer una analogía similar a la de un bloque proporcional que funciona a partir de amplificadores operacionales puros, como la lógica de PSoC se basa en capacidades conmutadas, no se tienen las mismas posibilidades de ganancia, o mejor dicho las ganancias lineales que se pueden obtener a partir de la variación física de resistencias no se pueden obtener utilizando el bloque PGA, puesto que la variación física de componentes permite un rango de posibilidades muchas veces lineal otras veces logarítmico. Pero los resultados obtenidos son satisfactorios.. Figura30: Ganancia 1 del bloque PGA, con una señal triangular y una cuadrada.. Figura31: Ganancia 1 del bloque PGA, con una señal seno y triangular.. 38.
(44) Puesto que el bloque PGA solo funciona con valores mayores a cero, la parte inferior de la señal de entrada se pierde puesto que no cumple con este requerimiento, como se muestra en las figuras 28 y 29. Por medio de la gráfica se puede observar que el valor que entra al micro controlador es el mismo de salida ya que la escala y la magnitud son las mismas en el semiciclo positivo. El bloque PGA permite la configuración de varios valores en su sección de ganancias permitiendo obtener varios resultados, debido a que esta variación no es lineal las ganancias pueden llegar a saturar la salida cuando se salta de una a otra. Con el fin de obtener señales que no contengan ningún tipo de ruido se colocó un condensador de 104 en paralelo a la salida la línea de referencia obtenidos el resultado comparativo de las figuras 30 y 31, donde la figura 30 muestra una señal contaminada con ruido a causa de los parámetros de capacidad de PSoC, y la figura 31 donde este efecto se reduce a causa del condensador de salida.. Figura32: Señal en amarillo: señal de entrada, Señal en azul señal de salida. PGA ganancia 2.. Figura 33: Señal en amarillo: señal de entrada, Señal en azul señal de salida. PGA ganancia 2 más condensador conectado entre la salida y la referencia.. Como se evidencio en imágenes y resultados anteriores a pesar de que las ganancias del PGA no se pueden variar de manera lineal como se varía un 39.
(45) potenciómetro en un amplificador inversor, las ganancias del PGA son bastante útiles y permiten una variedad de opciones de trabajo en el laboratorio. Ya que la capacidad que tiene el PGA de adecuarse a las señales de entrada, de esta manera se obtienen resultados como el de la figura 32.. Figura 34: Señal en amarillo: señal de entrada, Señal en azul señal de salida. PGA ganancia 7 más condensador conectado entre la salida y la referencia.. 7.3.2. Resultados del bloque integral. El bloque Opamp, que se utilizó en PSoC a pesar de ser de lógica conmutativa capacitiva permitió, la posibilidad resultados integrales a partir de la variación por código de los parámetros internos y externos dando como resultado obtenido en las figuras 33 y 34.. Figura 35: Señal en amarillo: señal de entrada, Señal en azul señal de salida.. 40.
(46) Integral de una señal seno.. Figura 36: Señal en amarillo: señal de entrada, Señal en azul señal de salida. Integral de una señal cuadrada.. En las figuras anteriores los resultados prácticos en la implementación del controlador integral, son satisfactorios debido a que se asemejan a resultados prácticos obtenidos en Simulink como lo muestra la figura 35.. Figura 37: Señal en amarillo: señal de entrada, Señal en morado: señal de salida. Integral de una señal cuadrada, según Simulink.. 7.3.3. Resultados del bloque derivativo. El bloque Opamp, que se utilizó en PSoC a pesar de ser de lógica conmutativa capacitiva permitió, la posibilidad de resultados derivativos a partir de la variación por código de los parámetros internos y externos dando como resultado obtenido en las figuras 38 y 39.. Figura 38: Señal en amarillo: señal de entrada, Señal en azul señal de salida. Derivada de una señal seno.. 41.
(47) Figura 39: Señal en amarillo: señal de entrada, Señal en azul señal de salida. Derivada de una señal seno y triangular.. Como se muestra en las figuras anteriores los resultados prácticos en la implementación del controlador Derivativo, son satisfactorios debido a que se asemejan a resultados prácticos obtenidos en Simulink como lo muestra la figura 40.. Figura 40: Señal en amarillo: señal de entrada, Señal en morado: señal de salida. Derivada de una señal seno, según simulink.. 7.4.. Aplicación en la planta de nivel.. Igual que el desarrollo del software y el hardware, la aplicación en la planta de nivel de líquidos, se hace por etapas las cuales se muestran en las figuras (), De tal manera que en la primera prueba se retoman los resultados obtenidos de experimentación en la planta de tal forma que se establece que el modo de actuar de la planta muestra, que si se desea controlar el actuador se deberá modificar la lógica inversa con la que funciona la válvula.. 42.
(48) 7.4.1.. Prueba en lazo abierto.. Partiendo de anteriores pruebas hechas sobre la planta de nivel, se muestra que habrá dos bloques para realizar la aplicación, uno el bloque hardware y el otro bloque planta. Donde el bloque hardware tendrá la función de generar; la señal de referencia, modificar el controlador y acondicionar la señal de realimentación. Por otro lado el bloque planta estará compuesto por el actuador (válvula proporcional), y los tanques de líquido donde se verificara la variación del nivel.. Señal de referencia. +/-. Actuador (válvula proporcional). Controlador. Variación de nivel en el tanque. (0v a 4v) 0. Bloque planta. Bloque Hardware Figura 41: Diagrama de bloques para la aplicación del hardware reconfigurable en la planta.. Como se observa en la figura 41, la prueba en lazo abierto del hardware junto con la planta permite observar el acoplamiento del controlador junto con los sistemas propios de la planta, de esta prueba se corrobora uno de los planteamientos hechos anteriormente, donde. se observa que la lógica inversa de la válvula. proporcional la cual funciona de 4 a 20mA,. obliga a realizar un circuito que. permita un comportamiento lineal del controlador sobre la planta. Por lo cual se hace una segunda prueba.. 7.4.2. Prueba en lazo abierto con circuito de corriente. La prueba en lazo abierto de la planta junto con un circuito que acondiciona la señal de control y permite la aplicación del hardware de manera lineal sobre la planta, se documenta en los resultados de la tabla (), al igual que la implementación del circuito de corriente diseñado figura 43.. 43.
(49) Señal de referencia. +/-. Controlador. 0. CTO. De corriente. Actuador (válvula proporcional). Variación de nivel en el tanque. (0v a 4v). 1.8u. Bloque Hardware. Bloque planta. Figura 42: Diagrama para realizar pruebas conjuntas entre el hardware y la planta con un circuito que modifique la lógica inversa de la planta.. Conexion_1. L1 B1. 24v R6. R3. Conexion_2. R7. 10k. U6. B. 10k. 10k. 1. U5:A. C. 5. R9 1. 2. 4. 4. U2:B. 6. 2. A. 6 5. R8. 3. LM358. 8. V2 (4v). OPTOCOUPLER-NPN. 220. 10k v-. R2. 4 1. R5. 7. 10k. 8. R1 V1. LM358N 10k. v-. R4 10k v-. Figura43: Circuito para modificar la lógica de apertura de la válvula.. A. C (mA). Apertura de la válvula proporcional (%). 12. 20. 0. 2. 6. 11. 50 – 60. 0. 0. 4. 100. V2(voltios). V1(voltios). (V2-V1). 4. 0. 4. 4. 2. 4. 4. B. (A*3). Tabla 5: puntos de medida en los 3 experimentos realizados.. Como se muestra en la tabla 5, el voltaje v1 es el voltaje que proviene del controlador, el voltaje v2 es un voltaje fijo de 4 voltios que sirve de referencia, después esta diferencia de voltajes en el punto de medición A, es multiplicado por 44.
(50) una constante de amplificación de 3, de tal forma que al llegar al opto acoplador, la corriente que se encuentra en el punto de medición C, controlara la apertura de la válvula. De tal forma que con las señales de referencia controlan directamente la apertura y cierre de la válvula proporcional.. 7.4.3. Prueba en lazo cerrado Cuando las pruebas respectivas sobre el funcionamiento de la planta en lazo abierto y cerrado muestran que el controlador puede modificar la variación de nivel en el tanque, por medio de la apertura y cierre de la válvula proporcional, se realiza una última prueba donde se completa el lazo de realimentación con un sensor ultrasónico de nivel el cual funciona por colector abierto de tal manera que al cerrar el circuito interno por medio de algún componente externo se pueden tomar medidas en corriente o voltaje.. Señal de referencia. +/-. Actuador (válvula proporcional). Controlador. (0v a 4v) CTO. De corriente. Variación de nivel en el tanque. Sensor de nivel ultrasónico. Bloque Hardware. Bloque planta. Figura 44: Diagrama para realizar pruebas conjuntas entre el hardware y la planta con sensor de nivel ultrasónico.. Como se muestra en la figura 44, el sensor de nivel ultrasónico perteneciente al bloque planta, permite completar el lazo cerrado, permitiendo la verificación de la aplicación del controlador sobre la planta.. Como uno de los objetivos del proyecto fue la implementación del lazo de control en la planta de nivel de. líquidos amatrol T5552, para obtener resultados y. poderlos comparar, se tomaron dos señales para la comparación; la señal de 45.
Figure



+7






Documento similar
1.1.2 Publicaciones científicas/ingenieriles El control en cascada PID es uno de los métodos más exitosos para mejorar el rendimiento del control en lazo cerrado ocasionando
Sistema de lazo cerrado: En este tipo de control sí se mide la variable controlada y se utiliza para comparar con la señal de referencia para generar una acción de control en función
de intercambio térmico se muestra en la Figura 1, donde se puede reconocer un lazo de control primario establecido por la variable temperatura y un lazo de control secundario
Sistema de Control Con el objetivo de poder generar unas señales de voltaje de salida indicadas, en el presente trabajo se implementa una estrategia de control en lazo cerrado, donde
Diseño de las estrategias de control en lazo cerrado Una vez obtenido un modelo del sistema a controlar, se formaron dos equipos de alumnos para que cada uno diseñara una estrategia
b Ventana o panel de sistema de control La ventana o panel de sistema de control representa una vista frontal de la planta de control de nivel y flujos T5552 con todos sus
Control de posición Respuesta de lazo abierto Respuesta de lazo cerrado Evaluación experimental de las prestaciones del sistema en lazo cerrado La Figura 7 muestra la
Figura 2.16 Sinóptico para el Control Digital Directo El Entrenador ALECOP SAD-100 registra además, datos históricos del comportamiento de la planta en lazo cerrado y activa
