INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICAUNIDAD PROFESIONAL ZACATENCO “ADOLFO LÓPEZ MATEOS”
“INTERFAZ GRÁFICA PARA EL MONITOREO DE
PARÁMETROS DE UN MOTOR DE CORRIENTE
CONTINUA UTILIZANDO EL CONTROLADOR PID”
TESIS
QUE PARA OBTENER EL TÍTULO DE INGENIERO ELECTRICISTA
PRESENTAN:
FALCÓN HERRERA MANUEL GUTIÉRREZ PÁEZ LUIS ANTONIO
ASESORES:
M. EN C. MANUEL AGUILA MUÑOZ M. EN C. MERCEDES LÁZARO GONZAGA
M. EN C. MANUEL GARCÍA LÓPEZ
RESUMEN
Los sistemas de producción basados en la implementación de máquinas de corriente continua (C.C.), son comunes en procesos industriales, los cuales necesitan un control de velocidad para la obtención de los productos finales que se ofrecerán en el mercado.
Considerando que existen diferentes tipos de máquinas de C.C. este trabajo se enfoca al estudio del motor de corriente continua de excitación separada, en el cual se realiza el control de velocidad por medio del controlador proporcional integral derivativo (PID).
La implementación del controlador PID, es posible programarlo en computadoras personales (PC´s) por medio de software. En este trabajo se utiliza el software LabVIEW, el cual tiene varias ventajas en su aplicación, por mencionar algunas; programación de alto nivel, generación de pantallas gráficas para visualización de la información requerida.
Partiendo de lo anterior, se desarrolla una interfaz gráfica, en la cual se observa el comportamiento de la implementación del controlador PID en el motor de C.C. con excitación separada, además de permitir el monitoreo de sus parámetros, para condiciones en las que se encuentre sin carga y con carga nominal.
Para lograr el desarrollo de la interfaz gráfica es necesario contar con equipo que proporcione la información requerida, tanto para la ejecución del controlador, como de la adquisición de datos, por tal motivo se utilizaran transductores a los cuales se les realizaron una adecuación en la información adquirida por medio de la calibración.
DEDICATORIAS
FALCÓN HERRERA MANUEL
Con especial afecto, dedico esta tesis de ingeniera, a las personas que me han apoyado para cumplir mis objetivos y metas:
A mi padre José Armando Falcón González
A mi madre Apolonia Herrera Martínez
A mis hermanas Estela Cecilia Falcón Herrera
Y María de la Paz Falcón Herrera
GUTIÉRREZ PAÉZ LUIS ANTONIO
A MI MADREBEATRIZ EUGENIA GUTIÉRREZ PAÉZ
AGRADECIMIENTOS
FALCÓN HERRERA MANUEL
A DIOS Y LA VIRGEN DE GUADALUPE
Este agradecimiento es por prestarme la vida, y darme la oportunidad de estar en constante preparación, y por ayudarme espiritualmente en la toma de decisiones, y así poder sobre llevar los problemas y dificultades que han surgido a lo largo de toda mi vida.
A MIS PADRES, JOSÉ ARMANDO FALCÓN GONZÁLEZ Y APOLONIA HERRERA MARTÍNEZ
Agradezco a mis padres por el apoyo incondicional que me han proporcionado durante toda mi vida académica, por tener su ayuda en aspectos emocionales y económicos. Así también, como por la preocupación que han tenido en cada momento de mi vida, y por ser las personas a las cuales recurro en los momentos difíciles que día a día he vivido, recibiendo de ellos consejos y orientación, los cuales han llegado a ser puntos importantes en mi desarrollo de formación académica.
A MIS ABUELOS
A MIS HERMANAS ESTELA CECILIA FALCÓN HERRERA Y MARÍA DE LA PAZ FALCÓN HERRERA
Les agradezco la ayuda emocional que de ellas he tenido durante toda mi vida académica, por ser las personas a las cuales recurro para tener opiniones, con respecto a mis actitudes y comportamientos, además, por tenerme confianza y esperanza de que llegue a ser una persona destacada, a la cual vean como ejemplo y motivación.
A MIS SOBRINOS NAOMI XIMENA CALDERON FALCÓN Y CRISTOPHER CALDERON FALCÓN
Les agradezco el cariño que me han proporcionado durante este tiempo, siendo parte importante en mi preparación como persona y de forma profesional, ya que han motivado para lograr una superación, para ser una inspiración para ustedes para sus futuros retos y logros.
A PROFESORES Y COMPAÑEROS
AL INSTITUTO POLITÉCNICO NACIONAL
Por ultimo agradezco al Instituto Politécnico Nacional por haberme dado la oportunidad de cursar los semestres que requiere la carrera, que durante este periodo me proporciono la ayuda de profesores, laboratorios e instrumentos para la formación académica de mi carrera estudiantil.
AL PROYECTO DE INVESTIGACIÓN
GUTIÉRREZ PAÉZ LUIS ANTONIO
A MI MADRE BEATRIZ EUGENIA GUTIÉRREZ PAÉZ
Por ser la persona que a lo largo de todos estos años, me ha brindado su apoyo incondicional, en el logro de mis metas, además, de otorgarme la oportunidad de una vida académica que traiga consigo mi superación personal, a fin de abrirme puertas dentro del campo laboral e ir en busca de un incremento en la calidad de vida, tanto personal, como la que podré ofrecer a mi familia.
A MIS ABUELOS JOSÉ GUTIÉRREZ ZARCO Y GUADALUPE PAÉZ FLORES
Quienes formaron parte fundamental en mi educación y estuvieron en todo momento al pendiente de mí, procurando que no presentara alguna necesidad, con la cual mis estudios se vieran afectados, así mismo, su enorme influencia en la formación de la persona que actualmente soy.
AL INSTITUTO POLITÉCNICO NACIONAL
Por abrirme sus puertas y brindarme la posibilidad de estudiar, lo que siempre había anhelado, mientras conocía compañeros y profesores, quienes no solo fueron personajes pasajeros, sino que me dejaron y compartieron experiencias, que contribuyeron tanto a mi formación, como preparación para afrentar futuras adversidades en el campo laboral o incluso de índole personal.
AL PROYECTO DE INVESTIGACIÓN
ÍNDICE
i
CAPÍTULO I. INTRODUCCIÓN ... 1
GENERALIDADES ... 1
1.1 PLANTEAMIENTO DEL PROBLEMA ... 1
1.2 ESTADO DEL ARTE ... 2
1.3 OBJETIVOS ... 4
1.3.1 OBJETIVO GENERAL ... 4
1.3.2 OBJETIVOS PARTICULARES ... 4
1.4 JUSTIFICACIÓN ... 5
1.5 ALCANCES Y LIMITACIONES ... 6
1.6 ESTRUCTURA ... 7
CAPÍTULO II. MÁQUINAS DE CORRIENTE CONTINUA ... 9
GENERALIDADES ... 9
2.1 PRINCIPIO DE FUNCIONAMIENTO DE LAS MÁQUINAS DE CORRIENTE CONTINUA ... 10
2.2 PARTES PRINCIPALES DE UNA MÁQUINA ELÉCTRICA Y DIFERENCIAS CON UNA MÁQUINA DE CORRIENTE CONTINUA ... 10
2.3 DIFERENCIAS ENTRE MODO MOTOR Y MODO GENERADOR ... 12
2.4 TIPOS DE MÁQUINAS DE CORRIENTE CONTINUA ... 12
2.4.1 MOTOR SERIE ... 13
2.4.2 MOTOR DERIVADO ... 14
2.5 TIPOS DE CONTROL EN LAS MÁQUINAS DE CORRIENTE CONTINUA ... 17
2.5.1 CONTROLES DE VELOCIDAD ... 18
2.5.2 CONTROL DE VELOCIDAD DE UNA MÁQUINA DE CORRIENTE CONTINUA POR MEDIO DE LA MODULACIÓN POR ANCHO DE PULSO ... 19
CAPÍTULO III. TÉCNICAS DE CONTROL CLÁSICO Y SISTEMAS DE INSTRUMENTACIÓN VIRTUAL ... 21
GENERALIDADES ... 21
3.1 ACCIONES BÁSICAS DE CONTROL ... 21
3.1.1 CONTROLADOR AUTOMÁTICO, ACTUADOR Y SENSOR ... 22
3.1.2 DE DOS POSICIONES O DE ENCENDIDO Y APAGADO ... 23
3.1.3 CONTROL PROPORCIONAL ... 24
3.1.4 CONTROL INTEGRAL... 25
3.1.5 CONTROL PROPORCIONAL-INTEGRAL ... 27
3.1.6 CONTROL PROPORCIONAL-DERIVATIVO ... 28
3.1.7 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO ... 29
3.2 SISTEMAS DE INSTRUMENTACIÓN VIRTUAL ... 30
3.2.1 INSTRUMENTACIÓN TRADICIONAL ANTE INSTRUMENTACIÓN VIRTUAL ... 30
3.2.2 SOFTWARE LabVIEW... 32
3.3 SISTEMAS DE ADQUISICIÓN DE DATOS ... 35
3.3.1 TRANSDUCTORES Y SUS CARACTERISTICAS ... 36
3.3.2 SOFTWARE DE MONITOREO, HARDWARE Y PC... 38
3.3.3.1 CIRCUITOS EN DERIVACIÓN ... 38
3.3.3.2 CONVERTIDORES DE A/D... 38
3.3.3.3 CONVERTIDORES DE D/A... 38
3.4 INTERFAZ GRÁFICA ... 39
CAPÍTULO IV. DISEÑO DE LA INTERFAZ GRÁFICA DE CONTROL ... 41
GENERALIDADES ... 41
4.1 DESCRIPCIÓN GENERAL DEL SISTEMA ... 41
4.2 CONFIGURACIÓN DE LA TARJETA ARDUINO UNO-R3 ... 42
4.3 CALIBRACIÓN DE TRANSDUCTORES ... 44
4.3.1 TRANSDUCTOR DE TENSIÓN ... 45
4.3.2 TRANSDUCTOR DE CORRIENTE ... 47
4.3.3 TRANSDUCTOR DE VELOCIDAD ... 49
4.4 SINTONIZACIÓN DEL MOTOR DE CORRIENTE CONTINUA EXCITACIÓN SEPARADA. ... 51
4.4.1 RESPUESTA AL PULSO UNITARIO ... 52
4.4.2 OBTENCIÓN DE LAS CONSTANTES Kp, Ti Y TdPOR EL MÉTODO DE ZIEGLER-NICKOLS EN MATLAB R2010a. ... 53
4.5 DISEÑO DE LA INTERFAZ GRÁFICA PARA EL CONTROLADOR PID ... 56
4.5.1 DISEÑO DEL PANEL FRONTAL ... 57
4.5.2 ESTRUCTURA DE PROGRAMACIÓN ... 59
4.5.3 ADQUISICIÓN DE DATOS DE TENSIÓN, CORRIENTE Y VELOCIDAD 59 4.5.4 PROGRAMACIÓN DEL CONTROLADOR PID ... 60
4.6 DISEÑO DE LA ETAPA DE POTENCIA ... 63
4.6.1 CIRCUITO DE CONTROL ... 64
4.6.2 CIRCUITO DE FUERZA ... 65
4.7 PROTOTIPO FINALIZADO ... 67
CAPÍTULO V. ANÁLISIS Y VALIDACIÓN DE RESULTADOS ... 71
GENERALIDADES ... 71
5.1. SINTONIZACIÓN FINA MANUAL ... 71
5.2 CORRIENTE DE ARRANQUE EN VACÍO ... 73
5.3 REGULACIÓN DE VELOCIDAD ANTE CARGAS VARIABLES ... 75
5.4 CORRIENTE DE ARRANQUE A PLENA CARGA ... 77
5.5 RESPUESTA AL CAMBIO DE VELOCIDAD DE REFERENCIA ... 78
5.6 ETAPA DE ADQUISICIÓN DE PARÁMETROS DEL MOTOR DE C.C. ... 80
CAPÍTULO VI. CONCLUSIONES Y TRABAJOS A FUTURO ... 83
CONCLUSIONES ... 83
RECOMENDACIONES Y TRABAJOS A FUTURO ... 85
APÉNDICE A. ESTRUCTURA DE LA PLACA ELECTRÓNICA ARDUINO UNO-R3 87 APÉNDICE B. TRANSDUCTORES DE TENSIÓN Y CORRIENTE MARCA LEM ... 89
B.1. TRANSDUCTOR DE TENSIÓN MARCA LEM LV 25-P ... 89
APÉNDICE C. SINTONIZACIÓN DE CONTROLADORES PID ... 93
C.1. MÉTODOS DE SINTONIZACIÓN DE CONTROLADORES ... 93
C.2. MODELADO MATEMÁTICO DE LAS MÁQUINAS DE CORRIENTE CONTINUA CON EXCITACIÓN INDEPENDIENTE... 95
APÉNDICE E. EQUIPO DE LABORATORIO MARCA DE LORENZO ... 99
APÉNDICE E. ELEMENTOS ELECTRÓNICOS ... 103
APÉNDICE F. CÓDIGOS DE PROGRAMACIÓN MATLAB R2010a ... 107
LISTA DE FIGURAS
Figura 2.1. Diagrama simplificado de una máquina de C.C. [7]. ... 11 Figura 2.2. Circuito equivalente de un motor de C.C. en serie [7]. ... 13 Figura 2.3. a) Circuito equivalente de un motor de C.C. con excitación separada b) Circuito equivalente de un motor de C.C. en derivación [7]. ... 14 Figura 2.4. Par desarrollado por un motor derivado como función de la corriente de armadura [8]. ... 15 Figura 2.5. Características de velocidad con respecto a la corriente de armadura de un motor derivado [8]. ... 16 Figura 2.6. Circuito equivalente de los motores de C.C. compuestos. a) Conexión en derivación larga, b) conexión en derivación corta [7]. ... 17
Figura 3.1. Diagrama a bloques de un sistema de control industrial [10]. ... 22 Figura 3.2. Diagrama de bloques de un controlador de encendido y apagado [10]. . 23 Figura 3.3. Sistema con control proporcional [11]. ... 24 Figura 3.4. Diagrama a bloques de un sistema con control proporcional [11]. ... 25 Figura 3.5. Respuesta del controlador integral ante un error de escalón unitario [11]. ... 26 Figura 3.6. Diagrama de bloques de un controlador integral [11]. ... 26 Figura 3.7. Diagrama de bloques de un controlador proporcional integral PI [11]. .... 27 Figura 3.8. Respuestas del controlador PI a un escalón unitario [11]. ... 28 Figura 3.9. Diagrama de bloques de un controlador proporcional derivativo PD [11].28 Figura 3.10. Diagrama de bloques de un controlador proporcional integral derivativo PID [11]. ... 29 Figura 3.11. Comparación de la respuesta a un error de rampa unitaria de
Figura 3.14. Sección de un diagrama de bloques del software LabVIEW para el
cálculo de fallas de cortocircuito. ... 33
Figura 3.15. Placa electrónica Arduino Uno-R3. ... 34
Figura 3.16. Paleta de programación de la tarjeta Arduino Uno-R3. ... 34
Figura 3.17. Elemento básico de un sistema de adquisición de datos [13]. ... 35
Figura 3.18. Transductor de tensión marca LEM LV 25-P, b) Transductor de corriente marca LEM LTS 25-NP. ... 36
Figura 4.1. Diagrama general del sistema. ... 41
Figura 4.2. Conexión de la tarjeta Arduino Uno-R3. ... 44
Figura 4.3. Transductor de tensión marca LEM LV 25-P. ... 45
Figura 4.4. Prueba de calibración del transductor de tensión marca LEM LV 25-P. . 46
Figura 4.5. Ecuación característica del transductor de tensión. ... 46
Figura 4.6. Transductor de corriente marca LEM LTS 25-NP. ... 47
Figura 4.7. Prueba de calibración del transductor de corriente marca LEM LTS 25-NP. ... 48
Figura 4.8. Ecuación característica del transductor A de corriente. ... 48
Figura 4.9. Ecuación característica del transductor B de corriente. ... 48
Figura 4.10. Transductor de velocidad de velocidad. ... 49
Figura 4.11. Prueba de calibración del transductor de velocidad. ... 50
Figura 4.12. Ecuación característica del transductor de velocidad. ... 50
Figura 4.13. Respuesta al escalón unitario [10]. ... 51
Figura 4.14. Prueba de respuesta al escalón unitario. ... 52
Figura 4.15. Valores adquiridos del escalón de tensión y velocidad de la respuesta. 53 Figura 4.16. Respuesta tensión y velocidad del motor. ... 53
Figura 4.17. Aproximación del polinomio característico de tercer orden de la respuesta de velocidad del motor. ... 54
Figura 4.18. Tangente al punto de inflexión. ... 54
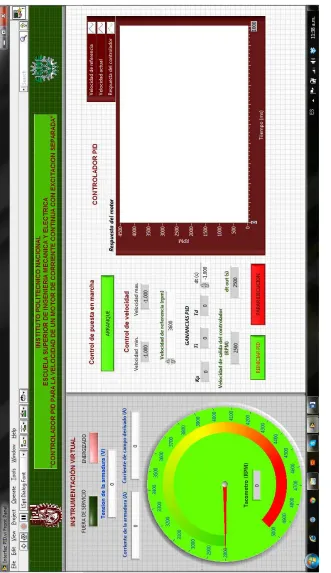
Figura 4.19. Panel frontal y diagrama de bloques de la interfaz gráfica del controlador PID. ... 56
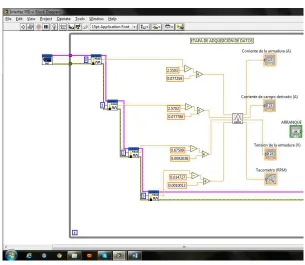
Figura 4.21. Programación para la adquisición de parámetros del motor. ... 60
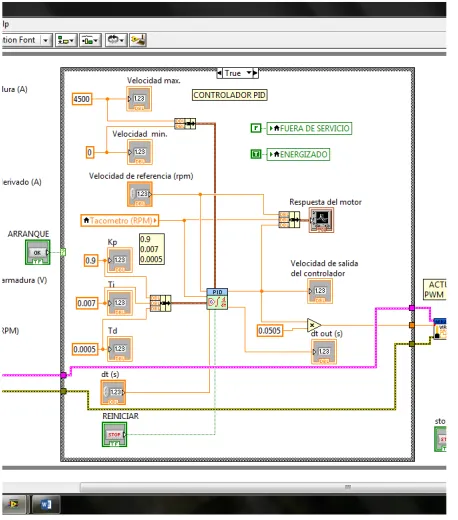
Figura 4.22. Programación del controlador PID, en condición de puesta en marcha. 61 Figura 4.23. Programación del controlador PID, en condición fuera de servicio. ... 61
Figura 4.24. Programación del actuador. ... 62
Figura 4.25. Circuito eléctrico de la etapa de potencia. ... 63
Figura 4.26. Circuito físico de la etapa de potencia. ... 63
Figura 4.27. Optoacoplador 4N25. ... 64
Figura 4.28. Mosfet IRFPS40N50L. ... 66
Figura 4.29. Fuente de corriente continua DL-30018. ... 67
Figura 4.30. Prototipo finalizado (vista general). ... 67
Figura 4.31. Prototipo finalizado (elementos auxiliares). ... 68
Figura 4.32. Prototipo finalizado. ... 68
Figura 4.33. Conexión del acoplamiento motor C.C. y generador C.C. ... 69
Figura 4.34. Módulos para la inserción de carga. ... 69
Figura 5.1. Programa modificado para la sintonización fina manual. ... 72
Figura 5. 2. Diagrama de conexión eléctrica para el estudio de la corriente de arranque. ... 73
Figura 5. 3. Respuesta de la corriente de arranque ante la prueba de escalón a 220Vcc aplicados en el devanado de armadura. ... 74
Figura 5. 4. Regulación de la velocidad al arranque con la incorporación del controlador PID. ... 74
Figura 5. 5. Abatimiento de la corriente de arranque con la incorporación del controlador PID. ... 75
Figura 5. 6. Respuesta del controlador ante la incorporación de una carga. ... 75
Figura 5. 7. Carga resistiva (lámpara incandescente de 40 W). ... 76
Figura 5. 8. Módulo de cargas Resistivas. ... 76
Figura 5. 9. Acoplamiento motor de C.C. y generador de C.C. ... 76
Figura 5. 10. Respuesta del controlador ante la liberación de una carga. ... 77
Figura 5. 12. Abatimiento de la corriente de arranque con la incorporación del
controlador PID a plena carga. ... 78 Figura 5. 13. Cambio de referencia hacia abajo. ... 79 Figura 5. 14. Cambio de referencia hacia arriba. ... 79 Figura 5. 15. Fluke 189. ... 80 Figura 5. 16. Interfaz en operación. ... 81 Figura 5. 17. Instrumentación virtual. ... 81 Figura 5. 18. Indicador gráfico en condiciones de carga nominal... 82 Figura 5. 19. Indicador gráfico en condiciones de vacío. ... 82
Figura 6. 1.DAQ NI USB-6211 [18]. ... 85
Figura A.1. Estructura de la placa electrónica Arduino Uno-R3. ... 87 Figura A.2. Puertos analógicos y digitales placa Arduino Uno-R3. ... 88
Figura B.1. Dimensiones y circuito de implementación del transductor de tensión marca LEM LV 25-P. ... 90 Figura B.2. Tensión de salida en función de la corriente del devanado primario. ... 91 Figura B.3. Dimensiones y terminales físicas del transductor de corriente marca LEM LTS 25-NP. ... 92
Figura C.1. Curva de respuesta en forma de S [10]. 93 Figura C.2. Motor de C.C. derivación con conexión independiente y corriente de
campo constante [8]. 95
Figura C.3. Diagrama a bloques de un motor de C.C. derivado con excitación
LISTA DE TABLAS
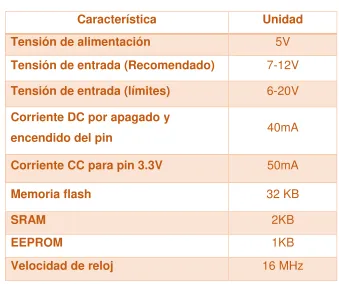
Tabla 4. 1. Características del Arduino Uno-R3. ... 43 Tabla 4. 2. Características del transductor de tensión marca LEM LV 25-P. ... 45 Tabla 4. 3. Características del transductor de corriente marca LEM LTS 25-NP. .... 47 Tabla 4. 4. Características del transductor de velocidad. ... 49 Tabla 4. 5. Valores de la pendiente y cruces de la pendiente de la prueba de
sintonización. ... 55 Tabla 4. 6. Contantes Kp, Ti y Td, obtenidas del método de sintonización Ziegler-Nichols. ... 55
Tabla 5.1. Sintonización fina manual. ... 72
Tabla 6.1. Cuadro comparativo para hardware alternativo. ... 86
Tabla B. 1. Configuración del alcance por medio de la conexión de sus terminales del transductor de corriente. ... 92
Tabla C. 1.Regla de sintonía de Ziegler-Nichols basada en la respuesta escalón de la planta. ... 94
LISTA DE SÍMBOLOS
PID Proporcional Integral Derivativo.
C.C. Corriente Continua.
PC´s Computadoras personales.
PWM Pulse width modulation, Modulación por ancho de pulso.
DAQ Data acquisition card, Tarjeta de adquisición de datos.
VI Virtual instrument, Instrumentación virtual.
PI Proporcional Integral.
fem Fuerza electromotriz.
Ra Resistencia de armadura.
Rs Resistencia serie.
Ls Inductancia serie.
Ia Corriente de armadura.
Is Corriente serie.
IL Corriente de carga.
Vs Tensión de la fuente.
Ea Tensión de armadura.
Rf Resistencia en derivación.
Radj Resistencia variable.
Lf Inductancia en derivación.
If Corriente en derivación.
K Constante debido a la corriente uniforme de campo.
Ø Flujo magnético.
�
�,
TdPar desarrollado.
TL Par de la carga.
Rc Resistencia de carga.
�
Velocidad angular.ia(t) Corriente de armadura en el tiempo.
�
Velocidad angular del rotor.D Coeficiente de fricción viscosa.
J Momento de inercia de los elementos giratorios.
e Señal de error.
Kp Ganancia proporcional.
Gc(s) Función de transferencia.
Ki Ganancia integral.
Gp(s) Función de transferencia de la planta.
Θi s Señal de entrada.
Θo s Señal de salida.
Ti Tiempo integral.
Td Tiempo derivativo.
Kd Ganancia derivativa.
SAD Sistema de adquisición de datos.
A/D Analógico – Digital.
V Vólt.
A Ampere.
Hz Hertz.
Ω Ohm.
C(t) Respuesta del sistema en función del tiempo. GND Conexión a tierra.
Icc Fuente de intensidad de corriente continua.
TTL Transistor transistor logic, Lógica transistor transistor.
RPM Revoluciones por minuto.
Ecc Fuente de tensión de corriente continua.
Vcc Tensión de corriente continua.
L Intervalo de tiempo entre el pulso de escalón y de cruce por cero de la línea tangente en el método de sintonización de Ziegler-Nickols.
T Intervalo de tiempo entre los cruces por cero y el valor máximo K de la tangente en el método de sintonización de Ziegler-Nickols.
°C Grados celcius.
CAPÍTULO I. INTRODUCCIÓN
GENERALIDADES
Gran parte de la industria está basada en procesos de producción de materiales, equipos, maquinarias, etc., donde los motores de corriente continua (C.C.) se desempeñan principalmente en sistemas de fabricación, donde la constancia es un factor fundamental en el éxito de cualquier industria; por lo cual la velocidad de un motor no puede variar bajo ninguna condición, de lo contrario se alteraría la productividad y por ende habría pérdidas económicas. Respuesta a ello, los controladores automáticos mantienen la velocidad constante bajo cualquier condición. En el presente trabajo se desarrolló una interfaz gráfica que permite la manipulación por parte del personal no especializado, dado su fácil comprensión y constante monitoreo de la respuesta del motor, aunado a un sistema de adquisición de algunos parámetros de la máquina de C.C., lo que sustituye a los equipos tradicionales de medición, reduciendo espacios requeridos y disminuyendo las tareas de mantenimiento.
1.1 PLANTEAMIENTO DEL PROBLEMA
en el sistema, lo que conlleva a bajas en la producción por la interrupción de dichos procesos, generando pérdidas económicas para la empresa.
Usualmente, la instrumentación que se emplea para la obtención de parámetros en las máquinas eléctricas, suelen ser deficientes, debido a que muchos de estos equipos son antiguos, por tal motivo generan errores e incertidumbres en la medición, sin olvidar el espacio físico que éstos ocupan y su elevado costo de mantenimiento. A pesar de que existen equipos de medición modernos (digitales) que pueden reemplazar a los analógicos, estos suelen ser de costo elevado, por lo que en la mayoría de las veces no se realiza la compra de éste equipo, al final de cuentas ocupan un espacio físico que puede ser reducido aprovechando el empleo de la instrumentación virtual.
Como en un principio se mencionaba, los procesos de producción requieren ser automatizados, generalmente se emplean controles del tipo electromecánico en máquinas eléctricas como: el arranque y paro, inversiones de giro, velocidad, posición, freno, etc.; repercutiendo en el comportamiento de sus parámetros, por lo cual se requiere también el monitoreo y supervisión de estos, sin tener la necesidad de implementar equipos robustos y de gran tamaño para este tipo de controles.
1.2 ESTADO DEL ARTE
Los motores de C.C. se han destacado por la fácil regulación de velocidad, considerando al motor de C.C. de excitación separada como la configuración que mejor desempeña dicha función, puesto que basta con regular la tensión en alguno de sus devanados; la técnica más sencilla se basa en sistemas electromecánicos, donde por medio de un reóstato variable conectado en serie al devanado de campo o de armadura, se modifica el valor de la tensión aplicada al devanado; en [1] se observa la configuración anteriormente mencionada y que forman parte de la fundamentación, dando el punto de partida para la elaboración de este trabajo.
tensión, donde al conjuntarse con tarjetas de desarrollo basadas en microcontroladores, se obtienen sistemas más eficientes y estables, garantizando la constancia en cada ejecución del proceso; aspecto que es difícil de obtener con sistemas electromecánicos, producto de la intervención del factor humano. En [2] se realizó el control de velocidad por medio de la técnica de modulación de ancho de pulso (PWM), a lazo abierto, con la integración de una tarjeta de adquisición de datos (DAQ), permitiendo al usuario seleccionar una tensión de referencia aplicada al motor de manera continua, dicho valor de referencia es introducido desde una interfaz gráfica generada en LabVIEW.
Sin embargo en [2] el sistema de control sigue siendo básico, puesto que al no poseer una señal de retroalimentación, no se produce una adecuada regulación de velocidad, bajo condiciones de carga variable con el tiempo, por lo tanto ante algún cambio del sistema se reflejará en un aumento o disminución de velocidad.
Dando respuesta a la problemática de la continua regulación de velocidad, existen los controladores automáticos a lazo cerrado, donde ante la comparación del error de una señal de retroalimentación y una de referencia, el controlador adecuará la tensión entregada al motor, con ello se garantiza que ante un cambio de la carga acoplada al motor, el controlador lo llevará a su velocidad deseada de forma automática, sin alguna intervención humana. Ejemplo de ello es mostrado en [3] donde se implementó un controlador proporcional integral diferencial (PID), el cual destaca los efectos de cambio ante la velocidad de referencia y carga.
1.3 OBJETIVOS
1.3.1 OBJETIVO GENERAL
Diseñar una interfaz gráfica que permita realizar la regulación de velocidad y ajuste ante cambios de velocidad y carga, por medio de un controlador PID, en un motor de corriente continua con excitación independiente.
1.3.2 OBJETIVOS PARTICULARES
Desarrollar un sistema de adquisición de datos y monitoreo de parámetros con el software LabVIEW.
Describir lo fundamentos de la teoría referente a máquinas eléctricas en corriente continua.
Realizar la supervisión de los parámetros eléctricos y mecánicos (velocidad) de un motor de corriente continua, mediante una interfaz gráfica e intuitiva, utilizando el software LabVIEW.
Diseñar el controlador PID, para un motor de corriente continua con excitación independiente, utilizando el software LabVIEW y con la ayuda de la electrónica de potencia.
Diseñar el circuito de la etapa de potencia.
1.4 JUSTIFICACIÓN
Con la introducción de las tarjetas de adquisición de datos y desarrollo de una interfaz adecuada, LabVIEW ha convertido a las PC’s en verdaderos instrumentos virtuales. Hoy en día hacer mención de LabVIEW es hacer referencia a la adquisición de datos y procesamiento de señales, es hablar de bancos automáticos de medida y sistemas de validación, así como del control y medida industrial y cada vez más de sistemas embebidos y diseño de prototipos [5].
Cuando nos referimos a instrumentos de medición, se hace referencia a equipos rígidos en lo que destacan su panel frontal conformado por botones, leds y demás tipos de controles y visualizadores. LabVIEW incorpora instrumentación virtual (VI, Virtual Instrument), que simula el panel frontal de un instrumento físico, que se apoya en elementos de hardware accesibles por una PC, de modo que al ejecutar un programa donde se tiene un VI, el usuario podrá apreciar en la pantalla de su PC un panel similar al del instrumento físico, facilitando la visualización y el control del aparato. Partiendo de los datos que se muestran en el panel frontal, la VI debe actuar en la adquisición y generación de señales como su homólogo físico [5].
La acción del control proporcional integral derivativo (PID) es la técnica de control básico más utilizada en la industria, donde más de un 90% de los lazos de control utilizan la acción PI. Existe otro tipo de lazos que, debido a sus características dinámicas de retardo, utilizan además la acción derivativa, como ocurre en general con sistemas de temperatura [6].
La acción de control PID genera una señal, producto de la combinación de las acciones proporcional, integral y derivativa, lo cual permite eliminar el error del estado estacionario, consiguiendo tener una buena estabilidad del sistema de control.
Dentro de las ventajas que ofrecen las máquinas de C.C. se encuentra la alta confiabilidad y seguridad, asociada a largos intervalos sin necesidad de mantenimiento, junto a un control sencillo y económico.
1.5 ALCANCES Y LIMITACIONES
Alcances
En el desarrollo de este trabajo se desarrolla una interfaz gráfica para el control de velocidad de un motor de corriente continua de excitación separada en tiempo real, brindado una fácil modificación y regulación de su velocidad ante la variación de carga. Además de un sistema de control totalmente visual que ayude al usuario a mejorar la interpretación del sistema, sin el requerimiento de un elevado nivel de conocimientos, aunado a una fácil manipulación del control.
Por otro lado, como un complemento para el sistema, el desarrollo de un sistema de instrumentación virtual permite adquirir mediciones básicas como la tensión, corriente y velocidad, lo que sustituye a equipos físicos de instrumentación, reduciendo espacios y permitiendo su reutilización en otros sistemas con la simple modificación de la programación.
Limitaciones
1.6 ESTRUCTURA
En esta sección se describe de forma general cada uno de los capítulos expuestos en el presente trabajo.
CAPÍTULO I: Da una descripción breve de la problemática existente para el control de velocidad e interfaz gráfica para máquinas de C.C., planteando objetivos a realizar, así como también de los alcances y limitaciones presentes para su elaboración, partiendo de trabajos realizados de este tema.
CAPÍTULO II: Contiene información teórica general de máquinas de C.C. refiriéndose a los principios de operación, partes principales de construcción, tipos de máquinas de C.C. que existen y de las formas empleadas para el control de velocidad.
CAPÍTULO III: Incluye información teórica acerca de las técnicas de control clásico utilizadas para estabilizar la velocidad en las máquinas de C.C. además proporciona información acerca de sistemas de instrumentación virtual, empleados para la adquisición de datos, y acondicionamiento de las señales, para la ejecución de la interfaz gráfica.
CAPÍTULO V: Presenta los resultados obtenidos de las pruebas realizadas en diferentes condiciones de operación. Las pruebas realizadas son; arranque al escalón, arranque implementando el controlador PID, sin carga y con carga nominal, además de la introducción y retiro de carga nominal en el motor de C.C.
CAPÍTULO VI: Expone las conclusiones obtenidas en las pruebas realizadas
en el control de la velocidad del motor C.C. mediante la interfaz gráfica implementada, además se exhiben los trabajos futuros a realizar con la finalidad de realizar mejoras al trabajo.
APÉNDICES: Contiene información técnica provista de las hojas de datos de
CAPÍTULO II. MÁQUINAS DE CORRIENTE CONTINUA
GENERALIDADES
En la vida diaria se pueden encontrar sistemas automatizados que son implementados en procesos de producción dentro de la industria, los cuales contienen diferentes máquinas de corriente continua, en sus diversos modos de operación, ya sea como motor o generador, por tal motivo es necesario tener un amplio conocimiento de sus diferencias y similitudes, así como de sus principios de operación, además, es importante tener información de sus partes mecánicas y eléctricas con las que se encuentra construida, debido a las fallas que puedan presentar durante su utilización, ya sea de forma interna (elementos físicos que conforman a la máquina) o de forma externa (elementos de control y manipulación a la máquina).
2.1 PRINCIPIO DE FUNCIONAMIENTO DE LAS MÁQUINAS DE CORRIENTE CONTINUA
Una de las características de las máquinas de C.C. es que cuentan con un mecanismo que convierte las tensiones de corriente alterna en tensiones de corriente continua, a este mecanismo se le denomina conmutador [7].
El conmutador mantiene la misma dirección de la corriente en los conductores bajo cada polo. De acuerdo a las ecuaciones de Lorentz, un conductor que porta corriente experimenta una fuerza que tiende a moverlo cuando se le coloca un campo magnético, esto es el principio de operación de un motor de C.C. la fuerza ocasiona que la armadura gire en el sentido de las manecillas del reloj, por lo tanto, la armadura de un motor de C.C. gira en dirección del par desarrollado por el motor, por ello el par desarrollado por el motor se le denomina par impulsor.
Conforme la armadura gira, cada bobina en ella experimenta un cambio en el flujo que pasa a través de su plano. Por lo tanto, en cada bobina se induce una fuerza electromotriz (fem). De acuerdo con la Ley de Inducción de Faraday, la fem inducida debe oponerse a la corriente que entra a la armadura, en otras palabras, la fem inducida se opone a la tensión aplicada, de acuerdo a lo anterior la fem inducida en un motor suele recibir el nombre de fuerza contraelectromotriz o fuerza electromotriz inversa del motor [8].
2.2 PARTES PRINCIPALES DE UNA MÁQUINA ELÉCTRICA Y DIFERENCIAS CON UNA MÁQUINA DE CORRIENTE CONTINUA
La superficie expuesta de una zapata polar se llama cara polar y la separación que existe entre la cara polar y el rotor se denomina entrehierro.
[image:39.612.159.467.241.491.2]En una máquina de C.C. se encuentran dos devanados principales, los devanados del inducido (o de armadura) y los devanados de campo. Los devanados del inducido se encuentran definidos como aquellos en los que se induce la tensión, localizados en el rotor, mientras que los devanados de campo producen el flujo magnético principal, los cuales se encuentran ubicados en el estator; esto es mostrado en la figura 2.1.
Figura 2.1. Diagrama simplificado de una máquina de C.C. [7].
Los polos de las máquinas se encuentran construidos por material laminado, donde las caras polares se diseñan de manera excéntrica, con la finalidad de tener un mayor espaciamiento en la superficie del rotor que en el centro de la cara polar. Esta acción aumenta la reluctancia en los extremos de la cara polar y reduce el efecto de agrupamiento del flujo ocasionado por la reacción del inducido en la máquina.
El rotor o armadura de una máquina de C.C. consiste en un eje maquinado de una barra de acero y un núcleo montado sobre la barra. El núcleo se encuentra compuesto
Placa de datos
Culata Inducido
Colector
Estructura
Campana externa Escobillas
de muchas láminas troqueladas de una pieza de acero, con ranuras a lo largo de la superficie exterior donde se coloca los devanados del inducido. El colector se encuentra construido sobre el eje del rotor en un extremo del núcleo.
El colector se encuentra construido de barras de cobre aislado con micas. Donde las barras de cobre se fabrican suficientemente gruesas con la finalidad de permitir el desgaste natural ocasionado durante su operación. El aislamiento de mica que se encuentra localizado entre los segmentos de conmutación es más duro que el material del colector.
Las escobillas de la máquina son elaboradas en carbón, grafito, metal grafitado o de una mezcla de carbón y grafito. Poseen una alta conductividad para reducir pérdidas eléctricas, además, de tener un bajo coeficiente de rozamiento para reducir el desgaste excesivo.
Los aislamientos de los devanados, son la parte más crítica en el diseño de un motor de C.C. debido a que si existe una avería en la máquina se encontraría en cortocircuito. Para evitar que se dañe el aislamiento de los devanados por sobrecalentamiento, es necesario limitar la temperatura y esto se realiza por medio de refrigeración por aire [7].
2.3 DIFERENCIAS ENTRE MODO MOTOR Y MODO GENERADOR
Las diferencias en las máquinas de C.C. cuando operan como generador convierten la energía mecánica en energía eléctrica, o bien como motor realizan la conversión de la energía eléctrica en energía mecánica [7].
2.4 TIPOS DE MÁQUINAS DE CORRIENTE CONTINUA
Hay tres clases principales de motores de C.C. de uso general [7].
Motor serie. Motor derivado. Motor compuesto.
2.4.1 MOTOR SERIE
Un motor serie consta de un devanado con pocas vueltas de conductor grueso conectadas en serie al circuito del inducido. Conforme la corriente de la armadura cambia con la carga, también lo hace el flujo que produce el devanado de campo. El circuito equivalente del motor serie se muestra en la figura 2.2.
Un motor serie tiene una excelente característica en su par de arranque y de sobrecarga, una desventaja es que cuenta con una escasa regulación de velocidad, lo que puede provocar altas velocidades al poseer pequeñas y ligeras cargas [7].
Donde:
Ra= Resistencia de armadura. Rs= Resistencia serie.
Ls= Inductancia serie. Ia= Corriente de armadura.
Is= Corriente serie. IL= Corriente de carga.
Ea= Tensión de armadura.
Figura 2.2. Circuito equivalente de un motor de C.C. en serie [7].
Vs Ea
Ra Rs
Ia Is IL
-Ls
2.4.2 MOTOR DERIVADO
Un motor derivado tiene la característica de operar en una velocidad casi constante, en todo su margen de carga nominal. Teniendo una velocidad perfectamente estable, adaptándose fácilmente a diferentes ajustes de velocidad; sin embargo, posee una desventaja en su limitada capacidad en el par de arranque y de sobrecarga.
Un motor derivado tiene dos maneras de operar, ya sea con excitación separada (independiente) o en derivación.
Un motor de C.C. con excitación separada es un motor cuyo circuito de campo es alimentado por una fuente de potencia separada de tensión constante, en la figura 2.3a se muestra el circuito equivalente de un motor de C.C. con excitación separada.
Un motor de C.C. en derivación es aquel cuyo circuito de campo obtiene su potencia directamente de las terminales del inducido del motor. La figura 2.3b, muestra el circuito equivalente de un motor de C.C. en derivación.
Donde:
Rf= Resistencia en derivación. Radj= Resistencia variable. Lf= Inductancia en derivación. If= Corriente en derivación.
IL= Corriente de carga. Vf= Tensión de la fuente en derivación.
Figura 2.3. a) Circuito equivalente de un motor de C.C. con excitación separada b) Circuito equivalente de un motor de C.C. en derivación [7].
0 5 10 15 20 25 0 5 10 15 20 25
CORRIENTE DE LA ARMADURA (A)
P A R D E S A R R O L L A D O ( N -m )
Figura 2.4. Par desarrollado por un motor derivado como función de la corriente de armadura [8].
La ecuación correspondiente a la Ley de Tensiones de Kirchhoff, para el circuito del inducido de este motor, se observa en la ecuación (2.1).
� = �+ � � (2.1)
La ecuación de tensión en el inducido se indica en la ecuación (2.2).
� = ∅� (2.2)
Puesto que el par desarrollado en el motor tiene la siguiente relación �� = ∅ �, se despeja la corriente �, y esta se expresa en la ecuación (2.3). Además considerando que el par generado por el motor es proporcional a la corriente de la armadura, como se muestra en la figura 2.4.
�
=
�� �∅ (2.3)La característica de salida de un motor de C.C. en derivación se deduce de las ecuaciones de tensión del inducido y del par del motor, junto con la ecuación correspondiente a la Ley de Tensiones de Kirchhoff. La velocidad del motor se obtiene de la ecuación (2.4) [7].
� =
�∅
−
�Si existe un incremento en la corriente de la armadura se producirá una reacción significativa en motor, donde el aumento provocará la disminución del flujo, lo que generará que se eleve la velocidad del motor. De acuerdo a la saturación magnética del motor y de la severidad de la reacción de la armadura la cual puede ser menor, mayor o igual a la caída de velocidad, como se muestra en la figura 2.5 [8].
Figura 2.5. Características de velocidad con respecto a la corriente de armadura de un motor derivado [8].
En la figura 2.5 se observa el eje principal de este trabajo, donde se observa la caída de velocidad ante la inserción de una carga en comparación a una operación en vacío, esta desviación puede ser reducida por medio de la incorporación de un controlador automático para la velocidad del motor, dicho controlador se estudia en el capítulo 3.
2.4.3 MOTOR COMPUESTO
Figura 2.6. Circuito equivalente de los motores de C.C. compuestos. a) Conexión en derivación larga, b) conexión en derivación corta [7].
2.5 TIPOS DE CONTROL EN LAS MÁQUINAS DE CORRIENTE CONTINUA
El principal motivo por el cual se emplean motores de C.C. en el diseño de sistemas de control, es que cuenta con una excelente adaptación en la manipulación de sus velocidades, es decir, un motor de C.C. permite modificar su velocidad a cualquier par conveniente sin afectar ningún cambio en su construcción.
Los dos métodos más utilizados para obtener el control de la velocidad son el de control de la resistencia de la armadura y el control de campo [8].
Vs Ea
Ra Rs
Ia
IL
+
-RadjRf If
Lf Ls
Vs Ea
Ra Rs
Ia IL
+
-RadjRf If
Lf
Ls
a)
2.5.1 CONTROLES DE VELOCIDAD
Control de la resistencia de armadura
Con este método el control se logra insertando una resistencia Rc, en el circuito de la armadura de un motor serie, derivado o compuesto.
La resistencia adicional en el circuito de la armadura reduce la fuerza contraelectromotriz en el motor para cualquier corriente de la armadura que se requiera. Puesto que el flujo en el motor es constante y el par depende de la corriente de la armadura, la disminución en la fuerza contraelectromotriz da lugar a una caída de velocidad en el motor.
Las desventajas de este método de control de velocidad son las siguientes:
a) Pérdida de potencia considerable en la resistencia de control Rc. b) Disminución en la eficiencia del motor.
c) Deficiente regulación de la velocidad del motor derivado y compuesto.
Control de tensión en la armadura
Este método consiste en aplicar una tensión menor que el especificado en las terminales de la armadura, mientras que para motores tipo derivado y compuesto, el devanado de campo derivado debe mantener la tensión en un nivel constante. Este método de control de velocidad también es conocido como sistema Ward-Leonard.
2.5.2 CONTROL DE VELOCIDAD DE UNA MÁQUINA DE CORRIENTE CONTINUA POR MEDIO DE LA MODULACIÓN POR ANCHO DE PULSO
Los sistemas que realizan procesamientos de información binaria implementada para controlar procesos analógicos, requieren una etapa de entrada tipo analógica-digital, así como de una salida digital-analógica. Sin embargo, existe otro método para realizar el control, sin la necesidad de implementar estos convertidores, y es por medio del algoritmo de modulación por Ancho de Pulso (PWM, Pulse Width Modulation).
El algoritmo PWM se basa en la duración del tiempo que se encentra en alto o en bajo de un dato digital de n bits, considerado como salida de la etapa procesadora. Por lo tanto, para realizar el PWM es necesario implementar un contador y un circuito comparador.
Donde el comparador es el encargado de determinar si el dato aplicado en la entrada es igual al valor binario del contador, el cual se encuentra cambiando constantemente. Por lo tanto el tiempo que dura la señal en alto dependerá de la cantidad de pulsos de reloj que presente el contador para proporcionar un dato binario que sea mayor o igual al dato de entrada.
CAPÍTULO III. TÉCNICAS DE CONTROL CLÁSICO Y SISTEMAS DE INSTRUMENTACIÓN VIRTUAL
GENERALIDADES
En este capítulo se habla sobre los fundamentos básicos de los controladores que son implementados para su aplicación, así como las características de cada uno para una correcta selección en base a la naturaleza de la tarea a realizar. Por otro lado, se hace una comparación entre las diferentes respuestas que se generan ante una señal de error.
Por último, se muestran las ventajas incorporando la tecnología en sistemas de adquisición utilizando la instrumentación virtual ante una técnica de control.
3.1 ACCIONES BÁSICAS DE CONTROL
Un controlador automático es aquel que permite comparar un valor de entrada de referencia o deseado contra un valor de salida o real de un sistema, de ahí que el controlador determine la desviación y la reduzca a cero. El método por el cual el controlador reduce esta variación es a la que se le denomina acción de control.
3.1.1 CONTROLADOR AUTOMÁTICO, ACTUADOR Y SENSOR
Los elementos principales que componen a un sistema de control industrial se ilustran en la Figura 3.1, donde se muestra un diagrama a bloques de un sistema de control industrial, el cual consiste en un controlador automático, un actuador, una planta y un sensor (elemento de medición). El controlador detecta la señal de error que maneja niveles de potencial muy bajo a la entrada, pero que su salida será aplicada para niveles de potencial alto [10].
Amplificador Actuador Planta
Sensor
Salida Controlador automático
Detector de errores
Señal de error Entrada de
referencia
(Punto de ajuste)
+
-Figura 3.1. Diagrama a bloques de un sistema de control industrial [10].
Dicho controlador automático se conecta a la entrada de un actuador, este dispositivo de potencia que produce la entrada a la planta en base a la señal de control, con el fin de que la señal de salida se aproxime a la señal de entrada de referencia.
Los controladores se clasifican en base a sus acciones de control tales como:
1. De dos posiciones de encendido y apagado. 2. Proporcional.
3. Integral.
4. Proporcional-integral. 5. Proporcional-derivativo.
6. Proporcional-integral-derivativo.
Otra de las formas en que se pueden clasificar los controladores es en base a su tipo de energía que utilizan en su operación, como neumáticos, hidráulicos o electrónicos. La implementación de un controlador dependerá de la naturaleza de la planta y condiciones de operación, junto a las consideraciones y requerimientos que se demanden, como la seguridad, costo, disponibilidad, confiabilidad, precisión, peso y tamaño [10].
3.1.2 DE DOS POSICIONES O DE ENCENDIDO Y APAGADO
En este sistema de control el elemento de actuación solo tiene dos posiciones fijas, la de encendido y apagado. El control de dos posiciones además de ser simple es muy barato, razón la que extiende su campo de aplicación en sistemas industriales y domésticos.
La Figura 3.2 muestra un diagrama a bloques de la acción de control de dos posiciones, la que referencia al encendido con un nivel alto de tensión o un nivel bajo para la acción de apagado, se habla de sistemas electrónicos [10].
Figura 3.2. Diagrama de bloques de un controlador de encendido y apagado [10].
e
+
-U
1U
23.1.3 CONTROL PROPORCIONAL
Con el control proporcional, la salida del controlador es directamente proporcional a su entrada, la entrada es la señal de error (e), la cual es una función del tiempo [11].
��� � = � (3.1)
Donde � es una constante llamada ganancia proporcional. La salida del controlador depende únicamente de la magnitud del error en el instante en que se considera. La función de transferencia � , para este controlador se muestra en la ecuación (3.2).
� = � (3.2)
Este controlador no se refiere más que solo a un amplificador, la ganancia constante, tiende a existir sólo sobre cierto intervalo de errores que se le conoce como banda proporcional [10, 11].
Debido a que la salida es proporcional a la entrada, por lo que si el controlador sufre un error del tipo escalón, entonces la salida también será un escalón (Figura 3.3.).
Figura 3.3. Sistema con control proporcional [11].
0
Error Tiempo
Tiempo Salida del
El control proporcional entra en los controladores sencillos de aplicar, en general solo requiere alguna forma de amplificar. La Figura 3.4 muestra el diagrama a bloques del sistema donde la función de transferencia para la retroalimentación unitaria se representa en la ecuación (3.3).
Figura 3.4. Diagrama a bloques de un sistema con control proporcional [11].
�
=
� ��+ � �� (3.3)
3.1.4 CONTROL INTEGRAL
La salida de este tipo de controlador es proporcional a la integral de la señal de error
(e) con el tiempo, es decir:
��� � − �∫ (3.4)
De donde � es la constante denominada ganancia integral. Ésta tiene unidades de − . La Figura 3.5 muestra la respuesta del controlador ante un error de escalón
unitario. La integral de 0 a
t
, en realidad se refiere al área bajo la gráfica del error entre0 y t. Así, debido a que después de que el error comienza, el área se incrementa en una razón regular. La salida en cualquier tiempo es, entonces, proporcional a la acumulación de los efectos de los errores precedidos [10, 11].
Kp Gp (S)
θo(S) Controlador
Figura 3.5. Respuesta del controlador integral ante un error de escalón unitario [11].
La función de transferencia del controlador integral es la mostrada en la ecuación (3.5) donde � es una constante ajustable y si el error de entrada se duplica, la salida varia dos veces más rápido. Para un error de cero, el valor de la salida permanece estacionario. Este tipo de controlador a veces es mejor conocido como de reajuste (reset). La Figura 3.6 muestra un diagrama a bloques del controlador integral [10, 11].
=
� (3.5)Figura 3.6. Diagrama de bloques de un controlador integral [11].
Una desventaja del controlador integral es que el término − en el denominador implica la introducción de un polo en el origen, lo que reduce la estabilidad relativa del sistema.
0
Error Tiempo
Tiempo Salida del
controlador
E(s)
+
-
Ki
S
3.1.5 CONTROL PROPORCIONAL-INTEGRAL
La reducción en la estabilidad relativa como resultado de usar el control integral se puede resolver, como una incorporación del control proporcional, mediante el control proporcional integral (PI) como el de la Figura 3.7.
Figura 3.7. Diagrama de bloques de un controlador proporcional integral PI [11].
La acción de control se define mediante la ecuación (3.6) donde su función de transferencia está representada en la ecuación (3.7), tiene una ganancia proporcional
� y � se denomina tiempo integral. Tanto � como � son variables ajustables. El tiempo integral ajusta la acción de control integral, mientras que un cambio en � afecta tanto la parte integral como proporcional. El inverso del tiempo integral � se denomina velocidad de reajuste. Esta velocidad de reajuste se traduce en las veces por minuto en que se ejecuta la parte proporcional de la acción de control [10, 11].
= � + � � ∫ (3.6)
= � + � (3.7)
La Figura 3.8 muestra la respuesta del sistema al escalón unitario, donde se observa que las acciones de ambos controladores se ejecutan de manera independiente, guardando la jerarquía que su nombre señala primero, obteniendo la respuesta de la parte proporcional, para posteriormente ejecutarse la respuesta integral.
Kp
Gp(S) θo (S) Controlador Gc (S)
Error +
-Ki
S
+
+
θi (S)
Figura 3.8. Respuestas del controlador PI a un escalón unitario [11].
3.1.6 CONTROL PROPORCIONAL-DERIVATIVO
La acción de control que ejerce el controlador proporcional derivativo (PD) se encuentra expresado por la ecuación (3.8), donde su función de transferencia proviene de la ecuación (3.9), a diferencia del control PI se cambia la constante � por una constante , que al igual que en el controlador anterior también es ajustable. La acción de control derivativa se considera como un control de velocidad, pues la salida del controlador es proporcional a la velocidad de cambio de la señal de error. El tiempo derivativo es el tiempo en el cual se hace avanzar el efecto de la acción proporcional. La figura 3.9 muestra el diagrama a bloques del controlador proporcional derivativo [10, 11].
Figura 3.9. Diagrama de bloques de un controlador proporcional derivativo PD [11].
0
Error Tiempo
Tiempo Salida del
controlador
Debido a la acción integral Debido a la acción
proporcional
Kp
Gp (S) θo (S) Controlador Gc (S)
+
-KdS
+
+
= � + � (3.8)
= � + (3.9)
3.1.7 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO
El control proporcional integral derivativo (PID) mejor conocido como de tres términos, combina las ventajas individuales de las tres acciones de control. La ecuación del controlador se obtiene de la ecuación (3.10) donde su función de transferencia está representada en la ecuación (3.11) posee las tres variables ajustables de las acciones de control, el diagrama a bloques se muestra en la figura 3.10 [10, 11].
= � + � � ∫ + � (3.10)
= � + � + (3.11)
Figura 3.10. Diagrama de bloques de un controlador proporcional integral derivativo PID [11].
Kp
Gp (S) θ
o (S)
Controlador Gc (S)
+- Ki
S
+
+ θi (S)
KdS
Proporcional
Integral
Si este sistema estuviera expuesto ante un error de rampa unitaria la Figura 3.11 muestra el comportamiento del controlador y la comparación entre la respuesta de un controlador P, PD.
Figura 3.11. Comparación de la respuesta a un error de rampa unitaria de controladores P, PD, PID [11].
3.2 SISTEMAS DE INSTRUMENTACIÓN VIRTUAL
Un dispositivo virtual es aquel que puede reproducir un efecto sin la necesidad de poseerlo físicamente, de ahí que facilite la realización de aplicaciones pues no es necesario disponer físicamente de los instrumentos. La instrumentación virtual ha revolucionado el mercado de la instrumentación debido a que le permite al usuario configurar y generar sus propios sistemas, además de un alto desempeño del sistema, flexibilidad, reutilización y reconfiguración. Aparte de estos grandes beneficios logra una notoria disminución de costos de desarrollo y costos de mantenimiento [5].
3.2.1 INSTRUMENTACIÓN TRADICIONAL ANTE INSTRUMENTACIÓN VIRTUAL
La instrumentación tradicional actúa como un sistema totalmente aislado, bajo las condiciones predefinidas por el fabricante, con entradas y salidas fijas, con una interfaz para el usuario basada en botones perillas, led y un display que permiten controlar o
t
Rampa unitaria
0
e(t)
b) t
Solo proporcional
0
e(t)
c)
Acción de control PD Acción de
cambiar algunas características o funciones del instrumento, mientras que en su interior posee una arquitectura cerrada, impidiendo cualquier cambio de funcionalidad.
Por otro lado la instrumentación virtual (VI), aprovecha el bajo costo de las PC´s o estaciones de trabajo y su alto grado de rendimiento en procesos de análisis para implementar hardware y software que le brinden al usuario incrementar la funcionalidad del instrumento tradicional. Además la importancia trascendental es el permitir al usuario establecer las características del instrumento, así como sus potencialidades y limitaciones [5].
Un ejemplo de la comparación entre la instrumentación tradicional y virtual, se muestra en la figura 3.12, donde se observa la comparación del medio de interacción entre el operador y un sistema de bombeo de agua cualquiera, totalmente físico, ante la interfaz gráfica generada en LabVIEW, donde se destaca como principal característica tener un amplio panorama de lo que ocurre en cada etapa del proceso, pues la señalización de la interfaz gráfica, muestra los equipos en funcionamiento y el flujo de agua por cada tubería.
Figura 3.12. Instrumentación tradicional ante la VI de un sistema de bombeo de agua.
3.2.2 SOFTWARE LabVIEW
LabVIEW es un software de National Instruments, desarrollado para el mundo de la instrumentación y automatización de procesos, donde las exigencias de conocimientos previos en cuanto a programación son mínimos, este software sobresale de otros, principalmente por su lenguaje de programación, dado que revoluciona el lenguaje de programación tradicional, puesto que hace a un lado las líneas de código y comandos de programación, por un lenguaje de programación de alto nivel, basado en una programación gráfica con la interconexión de bloques. La programación se desarrolla en dos ventanas principales las cuales son [5]:
Panel frontal: Es la ventana que contiene toda la instrumentación como medidores, indicadores numéricos, controles numéricos, interruptores, representaciones gráficas de motores, tuberías, luces led, botones, matrices, etc., en otras palabras es la pantalla principal en la ejecución del programa donde se diseña la interfaz gráfica con la que el usuario interactúa. Tal como se ilustra en la figura 3.13, donde ese muestra un ejemplo de panel frontal para el cálculo de fallas de cortocircuito.
Diagrama de bloques: Es la ventana que contiene el código de programación, donde se representa toda la instrumentación o elementos contenidos en el panel frontal por medio de bloques interconectados para el flujo de datos entre ellos, así como las estructuras de control y selección, representadas por recuadros de contorno gris, que encierran la secuencia a ejecutar en cada etapa del proceso. La figura 3.14 muestra el diagrama de bloques para el cálculo de fallas de cortocircuito.
Figura 3.14. Sección de un diagrama de bloques del software LabVIEW para el cálculo de fallas de cortocircuito.
representada por un bloque para la apertura y cierre del periférico, así como la declaración de los puertos de salida y entrada tanto analógicos o digitales, estos bloques se encuentran en un menú destinado exclusivamente para la tarjeta Arduino Uno-R3 (figura 3.16) [5,12].
Figura 3.15. Placa electrónica Arduino Uno-R3.
3.3 SISTEMAS DE ADQUISICIÓN DE DATOS
Hoy en día la constante incorporación de las PC´s al mundo de la ingeniería e investigación resulta inevitable, muchas aplicaciones nuevas se han creado para adquirir datos y transferirlos a la memoria de las PC´s. Actualmente un sistema de adquisición de datos (SAD) está considerado como la parte fundamental de un sistema de medida que adquiere señales analógicas o digitales para su procesamiento, presentación o algunas ocasiones su registro [13, 14].
Los SAD se clasifican principalmente en:
a) Analógicos: La salida es una representación continua de la señal de entrada. b) Digitales: La salida es una representación proporcional digital de la entrada.
El desarrollo de este trabajo implica la elaboración de un SAD digital, actualmente son basados principalmente en una PC y están conformados de los siguientes elementos:
Transductores
Acondicionamiento de señal Hardware de adquisición de datos PC
Software
Los elementos mencionados del SAD se observa en la figura 3.17.
Figura 3.17. Elemento básico de un sistema de adquisición de datos [13].
ELEMENTO FÍSICO
SENSOR TRANSDUCTOR
ACONDICIONAMIENTO DE LA SEÑAL
CONVERTIDOR A/D
3.3.1 TRANSDUCTORES Y SUS CARACTERISTICAS
Los transductores son aquellos dispositivos que convierten una señal de una forma física en otra correspondiente pero de otra forma física, en otras palabras convierte un tipo de energía en otro, por ejemplo una energía mecánica a una señal eléctrica o incluso una señal de tensión eléctrica en una señal de corriente eléctrica, en la figura 3.18 se observa de forma física el transductor de tensión y el transductor de corriente respectivamente [13, 15].
Figura 3.18. Transductor de tensión marca LEM LV 25-P, b) Transductor de corriente marca LEM LTS 25-NP.
EXACTITUD
Es la cualidad que caracteriza la capacidad del transductor de otorgar valores próximos al valor verdadero de la magnitud medida.
PRECISIÓN
Se refiere a la capacidad del transductor para arrojar el mismo valor de medición en condiciones de repetitividad, dentro de las mismas condiciones determinadas que puedan alterar la medición, tal como la temperatura, usuario, circuitería y elementos auxiliares.
RESOLUCIÓN
Es el valor mínimo que puede ser registrado por el transductor, considerándose como el límite inferior de entrada para el funcionamiento del transductor.
LINEALIDAD
Se expresa como el grado de coincidencia de la curva de calibración y una línea recta, dicha recta es considerada como la ecuación que define la salida en función de la entrada y se requiere para la programación de un sistema de adquisición de datos.
ENTRADA SIMPLE
Es la conexión eléctrica para la medición de una tensión nodal referente a tierra, el punto nodal es conectado a un pin de entrada analógico del microcontrolador y las tierras se hacen un punto común.
ENTRADA DIFERENCIAL
Es la conexión dada para la medición de una diferencia de potencial entre dos puntos nodales indistintos a tierra, donde los dos puntos nodales son dirigidos a pines de entrada analógicos del microcontrolador y realizar una diferencia entre las tensiones nodales.
FRECUENCIA DE MUESTREO
3.3.2 SOFTWARE DE MONITOREO, HARDWARE Y PC
El hardware hace referencia a los elementos físicos (tarjetas de adquisición de datos) donde se adquiere y procesan las señales, mientras que el software (LabVIEW) es la parte imperceptible para la generación de la interfaz virtual, permitiéndole al usuario una visualización grafica de los datos obtenidos por el hardware.
3.3.3 ACONDICIONADORES DE SEÑAL
El acondicionamiento de señal consiste en adaptar los valores de salida de los transductores a las exigencias de la tarjeta de adquisición de datos, para el acondicionamiento de señales analógicas que requieran una correcta interconexión con un sistema digital se requiere la implementación de filtros y amplificadores [15].
3.3.3.1 CIRCUITOS EN DERIVACIÓN
Son circuitos auxiliares conectados en paralelo a fuentes de corriente, implementados para convertir dichos valores de corriente en valores de tensión permitiendo la adquisición por medio de un microcontrolador el cual solo registra valores de tensión.
3.3.3.2 CONVERTIDORES DE A/D
Es el elemento donde se convierte un valor de una señal analógica continuo en el tiempo, en una señal digital representada por un arreglo de binarios, para el procesamiento dentro de una pc.
3.3.3.3 CONVERTIDORES DE D/A
3.4 INTERFAZ GRÁFICA
La interfaz gráfica nace como un método de interacción amigable del usuario con el artefacto, principalmente dirigido a las PC´s. Una interfaz es un dispositivo que permite comunicar dos sistemas que no hablan el mismo lenguaje. De forma técnica el término interfaz hace referencia a la serie de conexiones y dispositivos que hacen posible la comunicación de dos sistemas. Sin embargo, normalmente vemos a la interfaz como la cara visible con la cual el usuario interactúa [16].
Las características básicas de una buena interfaz son:
a) Fácil comprensión, aprendizaje y uso.
b) Representación fija y permanente de un determinado contexto de acción. c) El objeto de interés ha de ser de fácil identificación.
d) Diseño ergonómico mediante el establecimiento de menús, barras de acciones e iconos de fácil acceso.
e) Las interacciones se basarán en acciones físicas sobre elementos de código visual o auditivo y en selecciones de tipo menú con sintaxis y órdenes.
f) Las operaciones serán rápidas, incrementales y reversibles, con efectos inmediatos.
g) Existencia de herramientas de ayuda y consulta.
h) Tratamiento del error bien cuidado y adecuado al nivel del usuario
CAPÍTULO IV. DISEÑO DE LA INTERFAZ GRÁFICA DE CONTROL
GENERALIDADES
En este capítulo se procede al diseño del prototipo del controlador PID, donde primeramente se realiza la calibración de los diferentes transductores con el fin de obtener la ecuación característica que se introduce en la programación, así como la determinación de las constates Kp, Ti y Td, correspondientes al motor de corriente
continua de excitación separada. Posteriormente se diseña la interfaz gráfica del controlador en LabVIEW, junto al circuito de la etapa de potencia que desempeñe la función del actuador para la modificación de la velocidad del motor.
4.1 DESCRIPCIÓN GENERAL DEL SISTEMA
El análisis de forma general del sistema empleado, se describe utilizando un diagrama a bloques, como se muestra en la figura 4.1, el cual consta de 4 etapas.
Figura 4.1. Diagrama general del sistema. PC
(LabVIEW) MICROCONTROLADOR (TARJETA ARDUINO)
ETAPA DE
POTENCIA
![Figura 2.1. Diagrama simplificado de una máquina de C.C. [7].](https://thumb-us.123doks.com/thumbv2/123dok_es/4981358.76182/39.612.159.467.241.491/figura-diagrama-simplificado-maquina-c-c.webp)