Comparación de un Controlador Lqr Vs un Controlador Pid Implementados en un Helicóptero de dos Grados de Libertad Pivotado
57
0
0
Texto completo
(2) TABLA DE CONTENIDO. INTRODUCCIÓN OBJETIVOS 1. MARCO DE REFERENCIA 1.1. HELICÓPTERO DE DOS GRADOS DE LIBERTAD. 1.2. MOTOR BRUSHLESS. 1.3. CONTROLADOR ELECTRÓNICO DE VELOCIDAD. 1.4. BATERIA LIPO. 1.5. ACELERÓMETRO. 1.6. GIROSCOPIO. 1.7. RS232. 1.8. ÁNGULOS DE NAVEGACIÓN. 1.9. CONTROL LQR. 1.10. CONTROL PID. 2. METODOLOGÍA 2.1. IMPLEMENTACIÓN DE LA PLATAFORMA. 2.1.1. Motores Brushless. 2.1.2. Hélices. 2.1.3. ESC. 2.1.4. Sensores. 2.1.5. Tarjeta de adquisición de datos. 2.2. MODELO DEL SISTEMA. 2.2.1. Modelo teórico. 2.2.1.1. Modelo simplificado. 2.2.1.2. Simulación de los modelos..
(3) 2.2.2. Modelo experimental. 2.2.2.1. Validación de los modelos. 2.3. DISEÑO DE CONTROLADORES 2.3.1. Controlador PID. 2.3.1.1. Controlador en pitch. 2.3.1.2. Controlador en yaw. 2.3.2 Controlador LQR. 2.3.2.1. Controlador en pitch. 2.3.2.2. Controlador en yaw 2.4. IMPLEMENTACIÓN DE LOS CONTROLADORES. 2.5. COMPARACIÓN DE DESEMPEÑO DE LOS CONTROLADORES FRENTE A PERTURBACIONES. 3. RESULTADOS CONCLUSIONES BIBLIOGRAFÍA.
(4) LISTA DE TABLAS Tabla 1. Información técnica de los motores brushless. Tabla 2. Características de las hélices. Tabla 3. Regla de sintonía de Ziegler-Nichols basada en la ganancia crítica Kcr. Tabla 4. Comparación del desempeño de los controladores..
(5) LISTA DE FIGURAS Figura 1. Helicóptero de 2 DOF – empresa quanser. Figura 2. Diagrama de conexión de un ESC. Figura 3. Funcionamiento interno de un giroscopio MEMS. Figura 4. Ángulos de navegación. Figura 5. Diagrama de bloques lazo de control PID. Figura 6. Plataforma experimental. Figura 7. Plataforma experimental. Figura 8. Motor brushless 1000Kv. Figura 9. Hélices 1045. Figura 10. ESC Hobbypower - 30A. Figura 11. IMU-MPU 6050. Figura 12. Potenciómetro lineal 10K. Figura 13. . Diagrama circuital de tarjeta de adquisición de datos. Figura 14. Diagrama de cuerpo libre del helicopter de 2DOF. Figura 15 Simulación del modelo teórico de pitch- respuesta al paso-. Figura 16. Simulación del modelo teórico de yaw- respuesta al paso-. Figura 17. Respuesta de la plataforma a una señal paso en pitch. Figura 18. Respuesta de la plataforma a una señal cuadrada en pitch. Figura 19. Respuesta de la plataforma a una señal paso en yaw. Figura 20. Validación del modelo hallado para pitch. Figura 21. Validación del modelo hallado para yaw. Figura 22. Diagrama de bloques lazo cerrado con acción proporcional. Figura 23. Respuesta del sistema con ganancia crítica. Figura 24. Respuesta del sistema con ganancia crítica-periodo crítico. Figura 25. Lazo de control LQR..
(6) Figura 26. Diagrama del lazo de control PID implementado en Simulink. Figura 27. Diagrama interno de los bloques PID- izquierda pitch, derecha yaw-. Figura 28. Controlador PID en pitch. Figura 29. Señal de control PID en pitch. Figura 30. Controlador PID en yaw. Figura 31. Señal de control PID en yaw. Figura 32. Diagrama del lazo de control LQR-pitch implementado en Simulink. Figura 33. Diagrama del lazo de control LQR-yaw implementado en Simulink. Figura 34. Diagrama interno de los bloques de ganancias de realimentación-Izquierda pitch, derecha yaw. Figura 35. Diagrama interno de los bloques de control LQR- izquierda pitch, derecha yaw-. Figura 36. Controlador LQR en pitch. Figura 37. Señal de control LQR en pitch. Figura 38. Controlador LQR en yaw. Figura 39 .Señal de control LQR en yaw. Figura 40. Sistema de control LQR con perturbación en pitch. Figura 41. Señal de control LQR con perturbación en pitch. Figura 42. Sistema de control LQR con perturbación en yaw. Figura 43. Señal de control LQR con perturbación en yaw. Figura 44. Sistema de control PID con perturbación en pitch. Figura 45. Señal de control PID con perturbación en pitch. Figura 46. Sistema de control PID con perturbación en yaw. Figura 47. Señal de control PID con perturbación en yaw..
(7) RESUMEN Este documento presenta el diseño de un controlador PID (Proporcional-Integral-Derivativo) y un controlador LQR (por sus siglas en inglés Linear-Quadratic Regulator) para la implementación de los mismos en una plataforma experimental de un helicóptero de dos grados de libertad pivotado. Para lograr esto, se implementó una plataforma experimental de un helicóptero de dos grados de libertad pivotado y se seleccionaron los diferentes elementos que la componen para su correcto funcionamiento, con el fin de poder aplicar las técnicas de control en cuestión. Adicionalmente, se hallaron los modelos matemáticos que describen el comportamiento del sistema y se realizó la validación de los mismos. Posteriormente, se aplican las diferentes técnicas de diseño para los respectivos controladores y se observa el comportamiento de la plataforma con la implementación de ambos lazos de control. Finalmente, se realiza la comparación de los controladores para determinar su desempeño frente a perturbaciones..
(8) ABSTRACT In this paper the designing of a controller PID(Proportional-Integral-Derivative) and a controller LQR(Linear-Quadratic Regulator) are shown. The controllers are implemented to control pitch an yaw angle on a experimental plataform of a small-scale helicopter 2DOF. At first, the experimental plataform of a small-scale helicopter was implemented, plus, the components needed for it were chosen. In adittion, the pitch and yaw dynamics systems are modellled. Then, the PID controller is tuned by the heuristic Zigler-Nichols method, and the feedback gains of LQR controller are obtained too. The comparison of the controller’s performance are shown..
(9) INTRODUCCIÓN. Los vehículos aéreos no tripulados UAV’s o drones se han venido empleando desde 1849 con diferentes propósitos debido a las múltiples ventajas que éstos ofrecen. Si bien su uso empezó con fines netamente militares, en la actualidad, la implementación de estos vehículos se ha expandido a diferentes ámbitos desde el educativo hasta el comercial (Esther, 2015). Los helicópteros de dos grados de libertad pivotados son plataformas que emulan el comportamiento de un helicóptero común con un rotor principal y un rotor de cola anti torque. Esto permite ahondar e investigar en conceptos y teorías relevantes para aplicaciones del mundo real sobre dinámicas y control de vuelo en helicópteros de cuerpo rígido, drones, o aeronaves similares (Quanser, 2006), (Universita’ Degli Studi di Siena, 2010). Para este tipo de aplicaciones se han propuesto diferentes soluciones a través de diversas técnicas de control que van desde el control clásico hasta el control robusto. Dentro del control clásico, se encuentra el controlador PID el cual se basa en la realimentación de la variable a controlar y calcula la diferencia entre el valor medido y el valor deseado. Por otro lado, otras técnicas de control como LQR emplean una señal de realimentación que tiene en consideración la totalidad de los estados que posee el sistema lo que permite llevar a cabo un método de control óptimo. Teniendo en cuenta lo anterior, este proyecto pretende realizar la comparación entre un controlador LQR y un controlador PID implementados sobre un helicóptero de dos grados de libertad pivotado. Al final, se observará el desempeño de los mismos con el fin de poder establecer cuál de los dos presenta un mejor comportamiento frente a perturbaciones en dicho helicóptero. Bajo este orden de ideas, es necesario encontrar en primera instancia el modelo matemático que describa el comportamiento del sistema. Luego, realizar la validación del mismo para determinar el porcentaje de aproximación que tiene respecto a la respuesta real del sistema. Posteriormente aplicar las técnicas de diseño de los controladores PID y LQR, e implementarlos en el sistema con el fin de poder observar el desempeño de los mismos. Finalmente, se deben analizar los resultados de la implementación de los controladores, realizar la comparación de las respuestas de ambos lazos de control y determinar cuál de los dos es el más óptimo para la plataforma..
(10) OBJETIVOS. OBJETIVO GENERAL Comparar un controlador LQR vs un controlador PID implementados en un helicóptero de dos grados de libertad pivotado para determinar cuál de los dos logra un mejor desempeño frente a perturbaciones en esta plataforma.. OBJETIVOS ESPECÍFICOS • Obtener el modelo matemático del helicóptero de dos grados de libertad pivotado y validar el modelo haciendo uso de software de simulación. • Implementar la sensórica y diseñar la tarjeta de adquisición de datos que permita la comunicación bidireccional entre el helicóptero de dos grados de libertad pivotado y el ordenador. • Diseñar los controladores LQR y PID e implementarlos en el helicóptero de dos grados de libertad pivotado. • Comparar el desempeño de los controladores LQR y PID frente a perturbaciones, teniendo en cuenta los siguientes criterios: tiempo de estabilización, máximo sobre impulso, restricciones sobre las señales de control y estabilidad..
(11) 1. MARCO DE REFERENCIA 1.1. HELICÓPTERO DE DOS GRADOS DE LIBERTAD. Los helicópteros de dos grados de libertad (DOF) pivotados son plataformas que emulan el comportamiento de un helicóptero común con un rotor principal y un rotor de cola anti torque. Esto permite ahondar e investigar en conceptos y teorías relevantes para aplicaciones del mundo real sobre dinámicas y control de vuelo en helicópteros de cuerpo rígido, drones, o aeronaves similares (Quanser, 2006), (Universita’ Degli Studi di Siena, 2010). En la siguiente imagen se puede apreciar una plataforma comercial para fines educativos ofrecida por la empresa quanser.. Fig 1. Helicóptero de 2 DOF – empresa quanser Fuente:(Quanser, 2006). 1.2. MOTOR BRUSHLESS. Los motores brushless o motores sin escobillas es un tipo de motor altamente empleado en aplicaciones de automóviles, helicópteros, drones aeromodelismo y aeroespaciales. Como su nombre lo indica, estos motores no emplean escobillas para su conmutación, en lugar de esto son conmutados electrónicamente. Debido a esto poseen algunas ventajas sobre los motores de inducción o motores DC con escobillas: . Mejor relación velocidad vs torque. Alta respuesta dinámica Alta eficiencia Mayor rango de velocidad Mayor vida útil.
(12) Adicionalmente, la relación torque versus el tamaño del motor es mayor a la de los motores DC convencionales, lo cual los convierte en dispositivos bastante útiles en aplicaciones en donde el espacio y el peso son factores críticos (Yedamale, 2010).. 1.3. CONTROLADOR ELECTRÓNICO DE VELOCIDAD. Los ESC’s (por sus siglas en inglés Electronic Speed Controller) son los encargados de variar la velocidad de rotación de los motores brushless. Estos dispositivos proveen una señal trifásica AC al rotor del motor brushless a partir de una señal de control de baja potencia (Jaramillo & Gómez, 2013). Dicha señal de control es una modulación de ancho de pulso PWM que comúnmente tiene una frecuencia de 50Hz; en donde el ancho de pulso de trabajo está determinado por el fabricante (típicamente en un rango de 1-2ms).. Fig 2. Diagram de conexión de un ESC Fuente: (Hobby King). Por lo general, las baterías empleadas para la alimentación de la etapa de potencia son de tipo Lipo, NiMh, NiCd y Li-ion.. 1.4.BATERIA LIPO. Las baterías de polímero de litio Lipo son las más usadas en aplicaciones de robótica, equipos autónomos y aeromodelismo ya que poseen ciertas ventajas frente a las baterías Li-ion, NiMh y NiCd: . El voltaje por celda es de 3.7V, mayor que las de NiMh y NiCd de 1.2V por celda. Tiene una capacidad de carga de 5 a 12 veces mayor a las baterías NiCd. A diferencia de las baterías NiCd y NiMh las de tipo Lipo no poseen efecto de memoria. Requieren un tiempo de carga menor que las NiMH. Al contrario de las baterías Li-ion las Lipo no necesitan un circuito para limitar la corriente de cada celda. Son livianas..
(13) 1.5.ACELERÓMETRO Son sensores con los cuales es posible medir la aceleración que sufre una masa inercial interna del dispositivo cuando éste se encuentra en movimiento. Para detectar dicha aceleración, estos sensores se basan en la primera ley de Newton F=ma. (1). Donde: F es fuerza m masa a aceleración. Teniendo en cuenta lo anterior, muchos acelerómetros se basan en la detección de la fuerza ejercida en una masa en un sistema masa resorte (Serway & Jewett, 2004). Considérese un sistema mecánico conformado por una masa fija m sujetada a un resorte con una rigidez k. En caso de que la masa se desplace una distancia x la fuerza experimentada es entonces F=kx. (2). kx=ma. (3). a=kx/m. (4). Reemplazando en (1). De esta manera, despejando a en (3) se obtiene. Con esto, es posible obtener la aceleración experimentada por la masa a partir del desplazamiento de la misma. Los acelerómetros pueden clasificarse según su tecnología, los más importantes son: . Capacitivos. . Piezoresistivos. . Piezoeléctricos. . Mecánicos. . MEMS(Microelectromechanical Systems). . Térmicos.
(14) 1.6.GIROSCOPIO Es un instrumento mecánico capaz de medir la orientación en el espacio de algún dispositivo y cuyo funcionamiento se basa en el principio de conservación del momento angular. Es por ello, que éstos representan una parte fundamental de los sistemas de navegación de vehículos (Sándor, 2014). Gracias a los avances tecnológicos, en la actualidad, estos dispositivos se han convertido en sensores tipo MEMS, con los que se puede medir la velocidad angular generada por un movimiento de rotación. Una pequeña masa al interior del giroscopio se desplaza debido a los cambios de velocidad angular generados por los giros del sensor, este movimiento se convierte en señales eléctricas de baja potencia. Ver Fig 3.. Fig 3. Funcionamiento interno de un giroscopio MEMS Fuente: http://www.tecnoficio.com/electricidad/images/giroscopio%20vibrante%20en%20movimiento%201.jpg. 1.7. RS232 Por sus siglas en inglés Recommended Standard 232, el protocolo de comunicación RS232 es un estándar mundial que rige los parámetros de uno de los modos de comunicación serial. Gracias a éste, se estandarizan las velocidades de transferencia de datos, la forma de control que utiliza dicha transferencia, los niveles de voltajes utilizados, el tipo de cable permitido, las distancias entre equipos, los conectores, entre otros. Dependiendo de los dispositivos a conectar las comunicaciones seriales pueden tener líneas adicionales a las de transmisión (Tx) y recepción (Rx), como lo son las líneas de control de flujo (Hands-hake). La interfaz del protocolo permite trabajar con comunicación síncronas o asíncronas y tipos de canal simplex, half 14úplex o full 14úplex. El primero, permite la comunicación de un dispositivo a otro únicamente en una dirección; un canal half 14úplex permite la comunicación en ambos sentidos, sin embargo, esta operación se ejecuta durante un tiempo determinado, ya que posteriormente se debe.
(15) realizar una conmutación en la línea para hacer el cambio de dirección; El tercer tipo de canal –full dúplex- permite la comunicación en ambas direcciones simultáneamente (EIA standard RS-232-C, 1969). La configuración principal para el uso de este estándar es la siguiente: . selección de la velocidad en baudios: 1200, 2400, 4800, 9600, 14400, 19200, 38400, 56000,115200.. . Paridad: parida par, paridad impar, sin paridad.. . Bits de parada: 1, 2.. . Cantidad de bits por cada símbolo o carácter enviado: 7, 8.. 1.8. ÁNGULOS DE NAVEGACIÓN Los ángulos de navegación son tres coordenadas angulares que permiten especificar la orientación de un sistema móvil tridimensional respecto a uno fijo (Euler, 1776). Los tres ángulos son: Pitch, yaw y roll. Ver Fig 4.. Fig 4. Ángulos de navegación Fuente: http://theboredengineers.com/WordPress3/wp-content/uploads/2012/05/PitchRollYaw.png. 1.9. CONTROL LQR El control LQR (por sus siglas en inglés Linear Quadratic Regulator), es un método de control óptimo con el cual. se asegura la estabilidad de un sistema en lazo cerrado a través de ganancias de. realimentación. Este método busca minimizar una función de costo, la cual, se puede definir como la sumatoria de desviaciones de los valores reales medidos respecto a los deseados; de esta manera, lo.
(16) que se pretende es encontrar aquellas ganancias del controlador que minimizan las desviaciones no deseadas (MIT), (Ogata, 2010). Teniendo en cuenta lo anterior, dado el sistema dinámico ̇. (5) (6). Con. Se define una función de costo ∫ [. ( ). ( ). ( )]. (7). Teniendo en cuenta la ley de realimentación, el control óptimo que minimiza a J es ( ). ( ). (8). Donde K está dado por (9). En donde P es la única solución definida positiva de la matriz Ecuación Algebraica de Riccati. (10). 1.10.. CONTROL PID. Es un método de control de control clásico por realimentación, el cual, calcula la diferencia entre el valor medido y el valor deseado, dicha diferencia se conoce como error. Este sistema posee tres componentes: ganancia proporcional, ganancia integral y ganancia derivativa. El primero depende del error actual, el segundo de errores pasados y el tercero es una predicción de los errores futuros (Ogata, 2010), (Ariki), (Mazzone)..
(17) La estructura de un controlador PID (Solaque G., Cristancho, & Gil C., 2014), considerando un lazo de control SISO (Single Input-Single Output) se muestra a continuación.. Fig 5. Diagrama de bloques lazo de control PID Fuente: (Ogata, 2010).. La acción proporcional P, da una señal de control que es proporcional al error, así ( ). ( ). (11). La acción integral I, posee una señal de control que es proporcional al error acumulado y está definida como ( ). ∫. ( ). (12). Por último la acción derivativa D, ofrece una señal de control de carácter predictivo dada por ( ). (13). Realizando la suma de las tres componentes, la señal obtenida de un controlador PID es. ( ). ( ). ∫. ( ). (14). Aplicando transformada de Laplace en (14) se puede hallar la función de transferencia de este controlador como se ve en (15) ( ). Con. (. ). (15).
(18) 2. METODOLOGÍA 2.1. IMPLEMENTACIÓN DE LA PLATAFORMA Se ha implementado una plataforma experimental de un helicóptero de dos grados de libertad, la cual permite el movimiento en los ejes pitch y yaw, con el fin de poder aplicar técnicas de control robusto, lineales y no lineales. Para la elaboración de esta plataforma se ha seleccionado el acrílico como material de construcción de la estructura de la misma, debido a que este es un material rígido de bajo peso. El modelo del prototipo diseñado se llevó a cabo en el software Solidworks. Dicho modelo se puede apreciar en al siguiente imagen.. Fig 6. Plataforma experimental. Fuente: Autor.. La plataforma experimental emula la configuración del helicóptero común con un rotor principal y un rotor de cola antitorque. El helicóptero posee dos hélices ubicadas perpendicularmente una de la otra y son controladas por dos motores brushless, uno por cada hélice. La propela superior controla el movimiento en el eje pitch y la propela de atrás el eje yaw. Adicionalmente, la planta posee una IMU (por sus siglas en inglés Inertial measurement unit) para la medición de los ángulos y velocidades angulares en los ejes pitch y yaw, y un potenciómetro lineal para complementar la medición del eje yaw. Las características de la estructura implementada se muestran a continuación:.
(19) . Masa del cuerpo del helicóptero: 170g. . Longitud del cuerpo del helicóptero: 49cm. . Dimensiones de la base: 18cm*18cm. . Altura de la estructura: 31cm. . Rango de ángulo de pitch: 90°(±45°). . Rango de ángulo de pitch: 180°(±90°). En la siguiente imagen se puede apreciar la distribución de las longitudes del cuerpo del helicóptero teniendo en cuenta el punto de pivote del helicóptero.. Fig 7. Dimensiones del cuerpo del helicóptero-vista lateral. Fuente: Autor.. Adicionalmente, los componentes que constituyen la plataforma fueron seleccionados teniendo en cuenta el debido estudio del estado del arte de plataformas similares y se describen a continuación: 2.1.1. Motores Brushless Estos son los principales elementos encargados de generar las fuerzas de empuje en los ejes pitch y yaw. Se han seleccionado los motores brushless A2212/13T los cuales son altamente empleados en aplicaciones de aeromodelismo. Dichos motores poseen una relación Kv de 1000rpm/V, una eficiencia cercana al 80% y una velocidad máxima de 10500rpm..
(20) Fig 8. Motor brushless 1000Kv Fuente: http://www.bphobbies.com/view.asp?id=V450327&pid=B1688512&img=l. En la siguiente tabla, proporcionada por el fabricante, se pueden apreciar los demás datos técnicos de los motores seleccionados. Tabla 1. Información técnica de los motores brushless. No. De celdas: Kv: Eficiencia Max: Eficiencia Max – Corriente: Corriente sin carga: Resistencia: Corriente Max: Potencia Max: Peso: Tamaño: Diámetro del eje:. 2 – 3 Li-Poly 1000 RPM/V 80% 4 – 10ª (>75%) 0.5ª @10V 0.090 ohms 15ª for 60S 167W for 60S 47 g / 1.65 oz. 27.5 mm x 30 mm 3.17mm (3.2mm). 2.1.2. Hélices Se escogieron las hélices con un diámetro de 10in con un paso de 4.5in puesto que el fabricante de los motores brushless seleccionados recomienda el uso de las mismas y además provee una tabla de datos de pruebas de dichos motores con estas hélices, suministrando información importante de voltajes, corrientes, velocidades y fuerzas de empujes, los cuales son factores importantes en el estudio aerodinámico del sistema. Algunas características de las hélices seleccionadas se pueden ver a continuación:.
(21) Tabla 2. Características de las hélices. Diámetro del eje: 6.0mm Diámetros ajustables con adaptador: 3mm, 3.2mm, 4mm, 5mm, 6mm, 6.35mm, 7.95mm Espesor del centro: 9.7mm Peso: 15g Alta Rigidez:. Fig 9. Hélices 1045. Fuente: http://www.hobbyking.com/hobbyking/store/__22446__GWS_Style_Slowfly_Propeller_10x4_5_Black_CCW_4pcs_.html. 2.1.3. ESC El criterio de selección para los controladores de velocidad es la corriente máxima suministrada a los motores. Para ello, se seleccionó un ESC HOBBYPOWER de 30ª con las siguientes especificaciones técnicas: . Salida: 30ª continuos- 40ª max durante 10 segundos.. . Voltaje de entrada: Batería Lipo de 2-4 celdas o batería NiMh de 5-12 celdas.. . BEC: 2ª/5V. . Velocidad máxima: 210,000rpm para 2 poles, 70,000rpm para 6 polos, 35,000rpm para 12 polos.. . Tamaño: Size: 45mm (L) * 24mm (W) * 11mm (H).. . Peso: 25g..
(22) Fig 10. ESC Hobbypower - 30A Fuente: http://www.rcshopbd.com/product/hobbypower-30ª-brushless-esc/. 2.1.4. Sensores Los sensores para la medición de los movimientos en los ángulos pitch y yaw son una IMU y un potenciómetro lineal respectivamente. Para la medición del ángulo pitch se ha seleccionado el sensor MPU-6050, de bajo costo (1.65 USD), el cual es una IMU de 6 grados de libertad ya que consta de un acelerómetro y un giroscopio, ambos de tres ejes.. El MPU-6050 emplea un protocolo de comunicación i2c para la entrega de datos de. aceleración y velocidad angular.. Fig 11. IMU-MPU 6050. Fuente: http://electrotec.cms.webhub.la/elements/images/image-article-9d2c009e6f20acf62734dfab4755bd0f.jpg. Debido a la acción de la gravedad, el eje z (yaw) no puede ser medido con el acelerómetro, sólo puede ser medido mediante los datos del giroscopio. Sin embargo, debido a la acción integral en la medida del ángulo a través del giroscopio se van acumulando pequeños errores con el paso del tiempo lo cual genera una deriva. A causa de este fenómeno, se ha empleado un potenciómetro lineal para complementar la medida del giroscopio del ángulo en el eje yaw..
(23) El potenciómetro lineal, de 50KΩ acoplado a la plataforma con una relación 1:1, entrega un voltaje entre 0-5V proporcional al ángulo medido en yaw.. Fig 12. Potenciómetro lineal 10K Fuente: Autor.. 2.1.5. Tarjeta de adquisición de datos. Se ha diseñado una tarjeta electrónica con un Arduino micro para le envío y recepción de datos a los diferentes bloques que componen el sistema. Esta tarjeta se encarga interpretar las señales enviadas por los sensores y realiza su respectiva codificación; además, se implementa un filtro complementario para la reducción del ruido presente en las lecturas tomadas de estos sensores. Adicionalmente, genera las señales PWM que controlan los ESC’s para el desplazamiento del helicóptero en el ángulo de navegación deseado. Esta tarjeta realiza la trasmisión de las señales de sensado – previamente acondicionadas – hacia el PC y, al mismo tiempo, recibe los datos enviados desde el ordenador, los cuales contienen las órdenes para la generación de las señales de control. Lo anterior se lleva a cabo a través de un protocolo de comunicación serie RS232. A continuación se puede apreciar el diagrama circuital de la tarjeta..
(24) Fig 13. Diagrama circuital de tarjeta de adquisición de datos. Fuente: Autor.. 2.2. MODELO DEL SISTEMA 2.2.1. Modelo teórico El modelo matemático que describe el comportamiento del sistema se obtiene mediante el estudio del diagrama de cuerpo libre aplicando leyes de Newton. Considerando la plataforma como un cuerpo rígido se tiene el siguiente diagrama (Solaque G., Cristancho, & Gil C., 2014):. Fig 14. Diagrama de cuerpo libre del helicopter de 2DOF. Fuente: http://jpkc.nwpu.edu.cn/yjsgsp/2013/16/attachment/lab/2%20DOF%20Helicopter%20Lab%20Manual.pdf.
(25) Teniendo en cuenta la segunda le de Newton se sabe que (16) Donde F=fuerza. M= masa a=aceleración Para movimientos rotacionales su equivalente es: ̇. (17). En donde = momento angular. J= momento de inercia. = velocidad angular. Reemplazando. por ̇ en 17 ̈. (18). Suponiendo que el sistema se encuentra en equilibrio y aplicando la segunda ley de Newton en cada eje de rotación se obtiene que en pitch ̈. ∑ ̈( ). ̇( ). ( ). (19). Para yaw ∑ ̈( ). ̈ ̇( ). (20).
(26) Con = momento inercial = fuerza de empuje producidos por las hélices = constantes de torque de reacción generadas por la acción de las hélices = coeficiente de rozamiento dinámico en los ejes de rotación. = Fuerza de gravedad actuando sobre el centro de masa. = distancia entre el eje vertical y el centro de masa.. 2.2.1.1. Modelo simplificado Para realizar la simplificación de los modelos de las dinámicas del sistema eliminando los acoples existentes entre las dinámicas de cada eje de rotación. Para ello la fuerza de empuje cero en 19 y. se aproxima a 0 en 20. De tal forma que ̈( ). ̇( ). ( ). ̈( ). . se aproxima a. ̇( ). (21) (22). Linealización del modelo. Para simplificar los cálculos, y poder aplicar técnicas de control lineal en el sistema es necesario realizar una linealización de la dinámica del sistema para el movimiento en el eje pitch. Por medio de la linealización a través de series de Taylor (Prieto, 2015), suponiendo una variación pequeña del ángulo pitch se tiene que:. Con lo cual ̈( ). ̇( ). (23).
(27) Aplicando transformada de Laplace en 22 y 23 se obtienen las funciones de transferencia de pitch y yaw respectivamente ( ). (24). ( ). ( ) ( ). y. (25). se pueden calcular teniendo en cuenta la inercia rotacional a través de un punto y la inercia de. una barra. La inercia total será la suma de las inercias de las dos masas de los motores ubicados a los extremos y la inercia de la barra (Prieto, 2015), (Solaque G., Cristancho, & Gil C., 2014). (26) y L son, respectivamente, la masa y la longitud de la barra de pivote. y. son las masas de los motores de pitch y yaw.. Las fuerzas de empuje. y. se pueden expresar como se ve en 27 (Sedoon, 1990) (27). Donde es la densidad del aire. es el coeficiente de empuje. A es el área que forma la hélice al girar. V=ΩR la velocidad de giro de la hélice. Ω=velocidad angular R=radio de la hélice..
(28) Suponiendo que la fuerza de empuje es proporcional al cuadrado de la velocidad angular de las hélices 27 puede ser reescrita como (28) Con. Se conoce que la velocidad angular de las hélices está dada por la relación rpm/V de los motores brushless empleados. Estos motores tienen una relación Kv = 1000rpm/V, con una eficiencia de cercana al 80%, reduciéndose a 800rpm/V. Haciendo la conversión de rpm a rad/s se tiene una relación de 83.77rad/s por cada voltio aplicado a los motores. De esta manera las funciones de transferencia de 25 y 26 pueden ser reescritas como se muestra a continuación ( ). (29). ( ). ( ) ( ). (30). 2.2.1.2. Simulación de los modelos. Una vez hallados los modelos, se procede a realizar la simulación de los mismos para observar la respuesta del sistema frente a una señal paso.. Fig 15. Simulación del modelo teórico de pitch –respuesta al paso-. Fuente: Autor..
(29) YAW 600. 500. Ángulo. 400. 300. 200. 100. 0 0. 1. 2. 3 time. 4. 5. 6. Fig 16. Simulación del modelo teórico de yaw- respuesta al paso-. Fuente: Autor.. Como se puede evidenciar, el modelo lineal para el ángulo pitch no presenta oscilaciones alrededor del punto de operación ni sobre impulso. Al mismo tiempo, es posible observar que el ángulo yaw sigue una trayectoria exponencial creciente.. 2.2.2. Modelo experimental A través del método de identificación se hallarán los modelos que describan la respuesta del sistema a un estímulo específico. En primera instancia, es necesario establecer las pruebas experimentales que permitan observar la respuesta del sistema frente a estímulos determinados. Para ello se debe excitar la planta con señales de entrada de diferentes amplitudes y frecuencias. Esto se logra a través de señales tipo paso, cuadradas o pseudoaleatorias (Escobar & Poveda, 2014). Para el caso del movimiento alrededor de pitch se estudió el comportamiento del sistema frente a señales paso de diferentes amplitudes y una señal cuadrada alrededor de un punto de operación; por otro lado, para yaw sólo se observó su dinámica frente a señales de entrada tipo paso; en las figuras 17, 18 y 19 se puede ver la respuesta de la plataforma a dichas señales..
(30) Fig 17. Respuesta de la plataforma al paso en pitch. Fuente: Autor.. Ángulo pitch. 50 40 30. voltaje motor primario. 20. 0. 5. 10. 15. 20. 25. 30. 35. 40. 0. 5. 10. 15. 20 Time. 25. 30. 35. 40. 2. 1.5. 1. Fig 18. Respuesta de la plataforma a una señal cuadrada en pitch. Fuente: Autor.. Respuesta al paso - Yaw. Ángulo yaw. 100 50 0 -50. 5. 5.2. 5.4. 5.6. 5.8. 6. 6.2. 6.4. 6.6. 6.8. 7. 5. 5.2. 5.4. 5.6. 5.8. 6 Time. 6.2. 6.4. 6.6. 6.8. 7. u1. 1. 0.5. 0. Fig 19. Respuesta de la plataforma a una señal paso en yaw. Fuente: Autor..
(31) Posteriormente, se escoge el modelo matemático que permita generar una función de transferencia que describa de la manera más aproximada el comportamiento del sistema. Luego de varios experimentos, se encontró que el modelo matemático que más se asemeja al comportamiento en el ángulo pitch de la planta es el siguiente: ( ). (31). A su vez, el modelo encontrado para el ángulo yaw de la planta es: ( ). (32). 2.2.2.1. Validación de los modelos Para la validación de los modelos se empleó la herramienta de identificación ident de MATLAB y se obtuvo que el modelo que describe el movimiento en pitch posee una aproximación del 87.86% respecto a la respuesta real del sistema. En la siguiente figura se puede apreciar la comparativa de ambas señales.. Fig 20. Validación del modelo hallado para pitch. Fuente: Autor..
(32) Al mismo tiempo, se encontró que para el modelo que describe el comportamiento de yaw. la. validación arroja una aproximación del 93.75% y la comparación contra el sistema real se evidencia en la siguiente imagen.. Fig 21. Validación del modelo hallado para yaw. Fuente: Autor.. 2.3. DISEÑO DE CONTROLADORES. Se ha decidido realizar el diseño de controladores individuales para cada ángulo con el fin de abordar la plataforma no como un modelo MIMO si no como dos modelos SISO lo que permite reducir la complejidad del sistema de control.. 2.3.1. CONTROLADOR PID 2.3.1.1. controlador en pitch Teniendo en cuenta la respuesta observada en el ángulo pitch frente al estímulo de una señal de entrada tipo paso, se ha llevado a cabo la sintonización del controlador PID para dicho ángulo mediante el método de Zieger- Nichols de ajuste de ganancia crítica. Para ello es necesario realizar el montaje del sistema en lazo cerrado con una acción proporcional y variar la ganancia de ésta hasta conseguir oscilaciones sostenidas (Ogata, 2010)..
(33) Fig 22. Diagrama de bloques lazo cerrado con acción proporcional Fuente: Autor.. Al realizar el experimento se encuentra que la ganancia crítica del sistema es Kc=0.04. En la siguiente figura se puede apreciar la respuesta del sistema al alcanzar la ganancia Kc Experimento para hallar Kc 10. 0. Ángulo[grad]. -10. -20. -30. -40. -50. 0. 5. 10 tiempo[s]. Fig 23. Respuesta del sistema con ganancia crítica. Fuente: Autor.. Una vez hallada la ganancia crítica, se mide el periodo de las oscilaciones.. 15.
(34) 10. 0. Ángulo[grad]. -10. -20. -30. X: 9.3 Y: -44.83. -40. -50. 0. 5. X: 11.16 Y: -45.21. 10. 15. Tiempo[s]. Fig 24. Respuesta del sistema con ganancia crítica-periodo crítico. Fuente: Autor.. En la anterior imagen se observa que el tiempo que transcurre entre cada oscilación es de aproximadamente 2.2 segundos, por tanto Pc=2.2. Luego, con la tabla sugerida por Zieger- Nichols se hallan las ganancias del controlador, de forma tal que: Tabla 3. Regla de sintonía de Ziegler-Nichols basada en la ganancia crítica Kcr..
(35) Por consiguiente las ganancias del controlador son: Kp=0.024. Ti=1.1 Td=0.275 Cabe aclarar, que fue necesario realizar un ajuste fino de las ganancias para mejorar la respuesta del sistema. Debido a que se presenta una respuesta con demasiado sobreimpulso es necesario disminuir la ganancia proporcional; a su vez, debido a que esta disminución trae consigo un aumento en el tiempo de estabilización se incrementa la ganancia derivativa con el fin de compensar dicho fenómeno y reducir dicho tiempo. De tal forma que las nuevas ganancias son:. Kp=0.01. Ti= 1.1. Td=0.8.. 2.3.1.2. controlador en yaw Para la sintonización del controlador PID en yaw se empleó la técnica de asignación de polos. Conociendo la función de transferencia de movimiento en yaw G(s) es igual a ( ). (33). Se pretende controlar G(s) con un controlador C(s) tal que ( ). (. ). (34). ). (35). Se obtiene un polinomio característico del sistema en lazo cerrado ( ). (. ). (.
(36) Se busca que el polinomio característico tenga la forma ( ). (. )(. ). (36). Deseando que el sistema tenga un tiempo de establecimiento menor a 3 segundos y un sobre impulso menor al 10% se igualan los términos de 35 con 36 y se hallan las ganancias del controlador. 2.3.2. CONTROLADOR LQR 2.3.2.1. Controlador en pitch Para el diseño del controlador LQR es necesario plantear las ecuaciones de estado que describen el sistema (Ogata, 2010). ̇. Teniendo en cuenta que la función de transferencia para el movimiento en pitch es: ( ) ( ) ( ) ( )[ ( ). ] ( ). ( ). ( ) ( ). (37) ( ). (38). Aplicando transformada inversa de Laplace en 38 ⃛( ). ̈( ). ̇( ). ( ). ( ). (39).
(37) Luego se hallan la matriz de estados, el vector de entradas y el vector de salidas.. ̇ ̇ ̇. (40). De esta manera la matriz de estado A es [. ]. El vector de entradas B es [. ]. [. ]. El vector de salidas C. Así, las ecuaciones de estado para el ángulo pitch son las siguientes ̇ [ ̇ ]=[ ̇. ] [ ]+[. ]. (41). Donde ̇. [. ] ,. ̈. [. ] ,. [. ] , D=0. Mediante el método del regulador cuadrático lineal se determina la matriz K del vector de control óptimo.
(38) ( ). ( ). (42). De esta manera el diagrama de bloques del lazo de control es. Fig 25. lazo de control LQR Fuente: (Ogata, 2010).. Se busca solucionar la ecuación de Ricatti para hallar la matriz P; si ésta existe y además es definida positiva el sistema es estable (Ogata, 2010). (43) Conociendo que. [. ]. Se establece un parámetro de optimización el cual determina la rapidez del sistema 0.5 Se debe tener en cuenta que la matriz Q y el parámetro de optimización R determinan la importancia relativa del error y del coste de energía (Ogata, 2010). Despejando P en 43 se obtiene [. ].
(39) Una vez hallada la matriz P, ésta se reemplaza en la ley de control óptimo del LQR la cual está dada por: ( ). ( ). ( ). (44). Por lo tanto el vector de ganancias K está definido como (45) Solucionando 45 se tiene que el vector de ganancias de realimentación para el ángulo pitch es: K= [1.3848. 0.5621. 0.1085]. 2.3.2.2.Controlador en yaw De igual manera, se deben establecer las ecuaciones de estado para el ángulo yaw. Teniendo en cuenta que la ecuación de transferencia en yaw es ( ) ( ) ( ) ( )[ ( ). ]. ( ). ( ). ( ). (46) (47). Aplicando transformada inversa de Laplace en 47 se tiene ̈( ). ( ). ( ). (48). Luego se hallan la matriz de estados, el vector de entradas y el vector de salidas.. ̇. ̇ ( ). (49).
(40) Así, la matriz de estados A es [. ]. El vector de entradas B y el vector de salidas C serán [. ] [. ]. Por lo tanto las ecuaciones de estados que describen a yaw son ̇ [ ]=[ ̇. ] [ ]+[. ]. (50). Donde ̇ [. ],. [. ],. [. ], D=0. Se estableció un parámetro de optimización R=100 Con una matriz de peso Q igual a [. ]. Teniendo en cuenta a 43 se despeja la matriz P [. ]. De esta manera, teniendo en cuenta a 45, se tiene que el vector de ganancias de realimentación para el ángulo yaw es K= [0.05. 0.024].
(41) 2.4. IMPLEMENTACIÓN DE LOS CONTROLADORES Luego del diseño de los controladores se realiza la respectiva implementación de los mismos en la plataforma experimental. Dicha implementación se lleva a cabo en la herramienta simulink de MATLAB, en esta se integran los bloques que componen los lazos de control del sistema. En las figuras 26 y 27 se muestra la aplicación del lazo de control implementada para los controladores PID.. Fig 26. Diagrama del lazo de control PID implementado en Simulink. Fuente: Autor.. En primera instancia, se tienen los bloques Stream Input y Packet Output los cuales permiten establecer una comunicación serial bidireccional con la tarjeta de adquisición de datos. Dichos datos son las lecturas tomadas de los sensores y las señales de control respectivamente. Debido a que el sensor empleado para la medición del ángulo en yaw es un potenciómetro, se agrega un bloque que realiza la conversión de voltaje a ángulo en grados. Los sistemas de los controladores poseen un bloque PID en donde se asignan las ganancias de control y un segundo bloque que realiza la conversión de voltaje a PWM, a continuación se puede visualizar estos sistemas.. Fig 27. Diagrama interno de los bloques PID- izquierda pitch, derecha yaw-. Fuente: Autor..
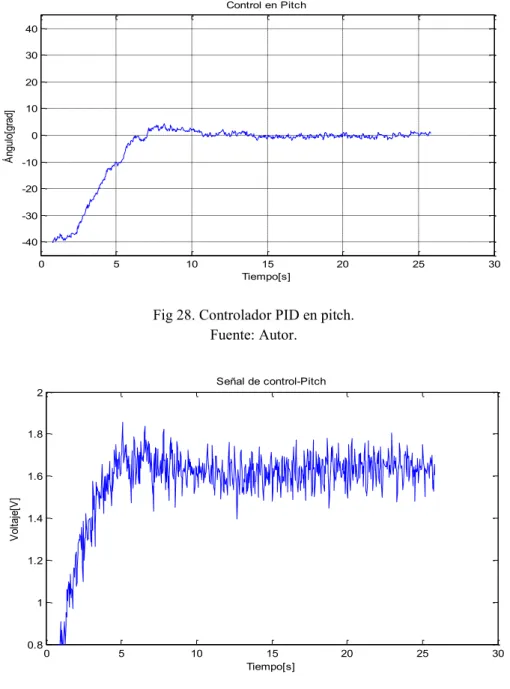
(42) Al realizar los experimentos necesarios se tiene que la respuesta del sistema de control PID es la que se puede ver en las figuras 28 -31.. Control en Pitch 40 30. Ángulo[grad]. 20 10 0 -10 -20 -30 -40 0. 5. 10. 15 Tiempo[s]. 20. 25. 30. Fig 28. Controlador PID en pitch. Fuente: Autor. Señal de control-Pitch 2. 1.8. Voltaje[V]. 1.6. 1.4. 1.2. 1. 0.8. 0. 5. 10. 15 Tiempo[s]. 20. 25. 30. Fig 29. Señal de control PID en pitch. Fuente: Autor.. En las figuras 28 y 29 se puede apreciar que el sistema alcanza la referencia en un tiempo aproximado de 9 segundos, con un sobre impulso cercano al 10%. La señal de control no presenta ninguna saturación..
(43) Control en yaw 20 15 10. Ángulo[grad]. 5 0 -5 -10 -15 -20. 1. 2. 3. 4. 5. 6 7 Tiempo[s]. 8. 9. 10. 11. 12. Fig 30. Controlador PID en yaw. Fuente: Autor.. Señal de control-Yaw 1.6 1.4 1.2. Voltaje[V]. 1 0.8 0.6 0.4 0.2 0 -0.2 -0.4. 1. 2. 3. 4. 5. 6 7 Tiempo[s]. 8. 9. 10. 11. 12. Fig 31. Señal de control PID en yaw. Fuente: Autor.. En las figuras 30 y 31 se puede apreciar que el sistema en el ángulo yaw alcanza la referencia en un tiempo aproximado de 2 segundos y sin sobre impulso, de igual forma se observa que la señal de control presenta una saturación en su nivel mínimo de voltaje..
(44) De igual manera, los controladores LQR fueron implementados en simulink. En las figuras 32-35 se pueden apreciar los esquemas de los lazos de control para cada ángulo.. Fig 32. Diagrama del lazo de control LQR-pitch implementado en Simulink. Fuente: Autor.. Fig 33. Diagrama del lazo de control LQR-yaw implementado en Simulink. Fuente: Autor..
(45) De igual manera, se emplean los bloques Stream Input y Packet Output para la recepción y envío de las lecturas de los sensores y las señales de control respectivamente. Las señales de realimentación son los estados de la planta; debido a que el modelo hallado para el movimiento en pitch es de tercer orden se realimentan tres estados (ángulo, velocidad angular y aceleración angular), a su vez, el modelo que describe el comportamiento en yaw es de segundo orden por tal motivo sólo se realimentan dos estados (ángulo y velocidad angular). Por otro lado, cada lazo de control posee el bloque de las ganancias de control correspondientes. En la siguiente imagen se pueden apreciar dichos bloques.. Fig 34. Diagrama interno de los bloques de ganancias de realimentación-Izquierda pitch, derecha yaw. Fuente: Autor.. Adicionalmente, los sistemas de los controladores poseen un bloque que limita las señales de control y un segundo bloque que realiza la conversión de voltaje a PWM, a continuación se puede visualizar estos sistemas.. Fig 35. Diagrama interno de los bloques de control LQR- izquierda pitch, derecha yaw-. Fuente: Autor..
(46) Los controladores LQR implementados generaron una respuesta en el sistema el cual puede apreciarse en las figuras 36-39.. Control LQR-Pitch 40 30. Ángulo[grad]. 20 10 0 -10 -20 -30 -40 0. 5. 10. 15. 20. 25. Tiempo[s]. Fig 36. Controlador LQR en pitch. Fuente: Autor.. Señal de control LQR-Pitch 2.6 2.4 2.2. Voltaje[V]. 2 1.8 1.6 1.4 1.2 1 0.8. 0. 5. 10. 15. 20. 25. Tiempo[s]. Fig 37. Señal de control LQR en pitch. Fuente: Autor.. En las figuras 36 y 37 se puede apreciar que en pitch el sistema alcanza la referencia en un tiempo aproximado de 3 segundos, con un sobre impulso cercano al 30%. La señal de control presenta una evidente saturación tanto en el nivel máximo como en el nivel mínimo de voltaje..
(47) Control LQR-Yaw 30. 20. Ángulo[grad]. 10. 0. -10. -20. -30. 0. 1. 2. 3. 4. 5 Time[s]. 6. 7. 8. 9. 8. 9. 10. Fig 38. Controlador LQR en yaw. Fuente: Autor.. Señal control LQR-yaw. Ángulo[grad]. 1.5. 1. 0.5 0. 1. 2. 3. 4. 5 Tiempo[s]. 6. 7. 10. Fig 39 .Señal de control LQR en yaw. Fuente: Autor.. En las figuras 38 y 39 se puede apreciar que en yaw el sistema alcanza la referencia en un tiempo aproximado de 1 segundos y no presenta sobre impulso. A su vez, se evidencia que la señal de control presenta una saturación en el nivel mínimo de voltaje. Como se observa, el sistema con los controladores PID presenta una respuesta más lenta respecto al control LQR, aunque alcanza la referencia deseada y se mantiene estable. Además, con los reguladores PID se puede apreciar que la plataforma presenta poco sobre impulso..
(48) Por otro lado, la respuesta del controlador LQR es más rápida que la del PID, sin embargo, esto ocasiona un mayor sobre impulso en la respuesta del sistema. De igual manera, si bien el controlador LQR en yaw es estable, éste no logra eliminar el error de estado estacionario y por tal razón no alcanza completamente la referencia deseada en este ángulo de navegación. Adicionalmente, se evidencia que la señal de control con el regulador cuadrático se satura en gran medida y esto en ocasiones puede representar un mayor consumo de energía.. 2.5. COMPARACIÓN DE DESEMPEÑO DE LOS CONTROLADORES FRENTE A PERTURBACIONES Una vez estabilizado el sistema se dispone a observar el desempeño de los controladores frente a perturbaciones. Para poder estudiar esta respuesta todos los lazos de control se someterán a una perturbación en el momento T=12s. Teniendo en cuenta lo anterior, en las figuras 40-47 puede apreciarse el comportamiento de los mismos. LQR con perturbaciones-Pitch 50 40 30. Angulo[grad]. 20 10 0 -10 -20 -30 -40 -50. 8. 10. 12. 14 Tiempo[s]. 16. 18. 20. Fig 40. Sistema de control LQR con perturbación en pitch. Fuente: Autor.. Señal de control LQR con perturbaciones-Pitch 2.2 2 1.8. Voltaje[V]. 1.6 1.4 1.2 1 0.8. 8. 10. 12. 14 Tiempo[s]. 16. 18. Fig 41 . Señal de control LQR con perturbación en pitch. Fuente: Autor.. 20.
(49) En las figuras 40 y 41 se puede apreciar que para el controlador LQR en pitch, cuando se presenta una perturbación, el sistema vuelve a la referencia en un tiempo aproximado de 3 segundos, con un sobre impulso cercano al 20%. La señal de control presenta una evidente saturación tanto en el nivel máximo como en el nivel mínimo de voltaje. LQR con perturbaciones-Yaw 80 60. Ángulo[grad]. 40 20 0 -20 -40 -60 -80 8. 10. 12. 14. 16. 18. 20. 22. Tiempo[s]. Fig 42. Sistema de control LQR con perturbación en yaw. Fuente: Autor.. Señal de control LQR con perturbaciones-Yaw 1.8 1.6 1.4. Voltaje[V]. 1.2 1 0.8 0.6 0.4 0.2 0. 8. 10. 12. 14. 16. 18. 20. 22. Tiempo[s]. Fig 43. Señal de control LQR con perturbación en yaw. Fuente: Autor.. En las figuras 42 y 43 se puede apreciar que para el controlador LQR en yaw, cuando se presenta una perturbación, el sistema vuelve a la referencia en un tiempo aproximado de 5 segundos, con un sobre impulso cercano al 50%..
(50) Control PID con perturbaciones-Pitch 50 40 30. Ángulo[grad]. 20 10 0 -10 -20 -30 -40 -50. 8. 10. 12. 14. 16 Tiempo[s]. 18. 20. 22. 24. Fig 44. Sistema de control PID con perturbación en pitch. Fuente: Autor.. Señal de control PID-Pitch 2.5. Voltaje[V]. 2. 1.5. 1. 0.5. 0. 8. 10. 12. 14. 16 Tiempo[s]. 18. 20. 22. 24. Fig 45. Señal de control PID con perturbación en pitch. Fuente: Autor.. En las figuras 44 y 45 se puede apreciar que con el controlador PID en pitch, cuando se presenta una perturbación, el sistema vuelve a la referencia en un tiempo aproximado de 6 segundos, con un sobreimpulso cercano al 40%, presenta oscilaciones antes de volver al estado estable y la señal de control no posee saturación..
(51) Control PID con perturbacions-Yaw 50 40. Ángulo[grad]. 30 20 10 0 -10 -20 -30. 8. 10. 12. 14. 16 Tiempo[s]. 18. 20. 22. 24. 22. 24. Fig 46. Sistema de control PID con perturbación en yaw. Fuente: Autor.. . Señal de control PID con perturbación-Yaw. 1.6 1.4. Ángulo[grad]. 1.2 1 0.8 0.6 0.4 0.2 0. 8. 10. 12. 14. 16 Tiempo[s]. 18. 20. Fig 47. Señal de control PID con perturbación en yaw. Fuente: Autor.. En las figuras 46 y 47 se puede apreciar que con el controlador PID en yaw, cuando se presenta una perturbación, el sistema vuelve a la referencia en un tiempo aproximado de 5 segundos, con un sobreimpulso cercano al 40% y la señal de control no posee saturación..
(52) Como se evidencia, ambos controladores vuelven al punto de referencia luego de someter el sistema a perturbaciones. Se puede observar que el control PID en pitch genera sobre impulso aproximado al 40% y presenta oscilaciones antes de volver al punto de operación. Por otro lado, el control LQR es el controlador que responde más rápido, genera un sobre impulso cercano al 20% en pitch, y en el ángulo yaw genera un error de estado. Adicionalmente, se debe tener en cuenta que las señales de control para los controladores LQR se siguen saturando por lo que el sistema requiere una mayor cantidad de energía. En la siguiente tabla se muestra una comparativa de los criterios de desempeño evaluados. Tabla 4. Comparación del desempeño de los controladores. Tiempo de estabilización. Sobreimpulso (máx). Saturación de señal de control. Estable Si(mientras las perturbaciones no sean de gran amplitud) Si(mientras las perturbaciones no sean de gran amplitud). PID-pitch. 6s. 40%. No. PID-yaw. 5s. 40%. No. LQR-Pitch. 3s. 20%. si. Estable. No. Si, aunque genera error de estado estacionario. LQR-yaw. 5s. 50%. Finalmente, se puede determinar que el controlador más óptimo para esta aplicación fue el LQR pues posee un tiempo de estabilización menor respecto al PID. Además, el controlador LQR presenta una mayor estabilidad pues, a perturbaciones de mayor amplitud no presenta oscilaciones. Aunque el sistema con el controlador LQR posee un sobreimpulso cercano al 20% en pitch y 50% en yaw, cuando se somete a perturbaciones, éste porcentaje sigue siendo menor que el que presenta el controlador PID..
(53) RESULTADOS Como primer resultado se obtuvo el modelo analítico que describe el comportamiento de la planta, a partir del diagrama de cuerpo libre y leyes de Newton. Sin embargo, estos modelos se alejan un poco del comportamiento real del sistema. De igual manera, se obtuvieron modelos del sistema de manera experimental a través de un proceso de identificación mediante la técnica de caja negra. Estos modelos tuvieron una aproximación de 87.83% y 93.75% para pitch y yaw respectivamente. A su vez, se diseñaron dos controladores PID, uno para cada ángulo de navegación. Para pitch se hizo la sintonización del sistema PID mediante la técnica de ajuste de ganancia crítica u oscilaciones sostenidas; para el ángulo en yaw se hallaron las ganancias del PID mediante la técnica de asignación de polos. De igual manera, se diseñaron dos controladores LQR (uno por cada ángulo a controlar) hallando la matriz de ganancias de realimentación más óptima para los estados de la planta mediante la solución de la ecuación de ricatti. Estos controladores, PID y LQR, fueron implementados en la plataforma experimental y se pudo hacer la comparación del desempeño de los mismos frente a perturbaciones, encontrando que el regulador cuadrático lineal es más óptimo para esta aplicación. Finalmente se tiene la construcción de una plataforma experimental de un helicóptero de dos grados de libertad. Esta plataforma ha sido construida con el fin de estudiar las dinámicas que comprenden el comportamiento de un helicóptero a escala y poder aplicar diversas técnicas de control para la orientación de la misma. La planta cuenta con un motor principal y un motor de cola anti torque, dos hélices (una por cada motor), dos ESC Electronic speed controller, una batería Li-po, una IMU de 6DOF y un potenciómetro lineal para la medición de los ángulos, y una tarjeta de adquisición de datos. Esta tarjeta se encarga de. la lectura y codificación de los datos de los sensores y envía esta. información hacia un ordenador a través de un protocolo de comunicación serie; a su vez, este dispositivo hace la recepción de datos provenientes del ordenador, los cuales, contienen la información de las señales de control que se desean implementar..
(54) CONCLUSIONES Luego de implementar cada uno de los controladores en la plataforma y de observar el comportamiento de los mismos, se ha encontrado que, bajo los criterios de tiempo de estabilización, máximo sobre impulso, estabilidad y restricciones en la señal de control, los controladores LQR diseñados para los ángulos pitch y yaw presentan un mejor desempeño que los PID. Esto, teniendo en cuenta que frente a perturbaciones el sistema presenta un máximo sobre impulso de 20% en pitch lo cual no representa un factor crítico para el funcionamiento de la planta y sigue siendo menor que el sobre impulso presentado con los controladores PID; un tiempo de estabilización de 3 segundos en pitch, lo que representa la mitad del tiempo que le toma al controlador PID alcanzar la misma referencia; y una mayor estabilidad, pues a perturbaciones de mayor amplitud el sistema con el lazo de control LQR presenta un menor número de oscilaciones que el PID. En cuanto a las señales de control, los reguladores LQR poseen una desventaja frente a los PID pues generan saturaciones que finalmente repercuten en el consumo de energía. Debido a la no linealidad del sistema, los controladores PID podrían tener un mejor desempeño si se aplicara la técnica de ganancias programadas, lo que permitiría al controlador trabajar de manera más efectiva dependiendo de la zona de trabajo. Cabe aclarar que los métodos heurísticos como los de Ziegler-Nichols para la sintonización de controladores PID representan sólo un punto de partida para el diseño de estos controlaros, lo que ahce que siempre sea necesario la aplicación de un ajuste fino para lograr que el lazo de control tenga el comportamiento deseado. Por otro lado, durante el diseño de los controladores LQR se debe considerar que si se tienen restricciones en las señales de control, la selección del parámetro de optimización R debe hacerse teniendo en cuenta esta condición de trabajo; de manera tal que para señales de control de mayores amplitudes se puede escoger una R de magnitud reducida obteniendo una respuesta rápida en el sistema pero con un consumo mayor de energía, si por el contrario, la señal de control es limitada, se puede seleccionar una R de mayor amplitud para evitar la saturación de la señal controlada aunque esto ocasiona que la respuesta del sistema sea lenta pero con un consumo de energía reducido. También se debe tener en cuenta que debido a que el sistema es altamente inestable, la linealización del modelo teórico se aleja un poco del comportamiento propio del sistema, debido a que su aproximación disminuye a medida en que los cambios de posición angular se hacen mayores. Esto hace que las.
(55) técnicas de control lineal sólo puedan ser aplicadas a zonas de trabajo muy reducidas y la hace susceptible a las perturbaciones. Teniendo en cuenta lo anterior, es mejor hallar un modelo que se aproxime al comportamiento del sistema en rangos de trabajos más amplios, por lo cual, el método de identificación es una solución óptima, pues permite obtener un modelo que se ajusta las respuestas del sistema cuando esta se estimula con señales de entrada de diversas amplitudes. Cabe aclarar que, durante el proceso de identificación, se debe escoger una estructura de modelo que se aproxime al comportamiento del sistema, pero que a su vez no represente un modelo tan complejo pues esto dificulta el proceso de diseño de los controladores al aplicar técnicas de control que requieran cálculos matemáticos complejos. Otro aspecto importante a tener en cuenta es la correcta selección de los sensores de la planta, pues éstos son los que permiten realizar la medición de la posición de la planta en sus dos grados de libertad. Para la planta implementada, la IMU de 6-DOF empleada no fue suficiente para dicha medición, ya que la acción de la gravedad no permite realizar una medida exacta de las aceleraciones presentadas en yaw. Sumado a esto, con este tipo de sensores la medición de posición angular no es posible de obtener únicamente mediante el uso de las velocidades angulares, debido a que si no se presentan cambios de dichas velocidades, durante un periodo prolongado, se empieza a generar un error acumulativo en el tiempo produciendo un efecto de deriva. Debido a lo anterior, fue necesario emplear un potenciómetro para la medición de ángulo en yaw, sin embargo, esto acarreó modificaciones a la estructura de la planta, por lo cual, agregar un magnetómetro a la sensórica o implementar una IMU de 9-DOF sería una mejor opción. Por otro lado, la tarjeta de adquisición de datos desarrollada presentó un correcto funcionamiento; empleando un protocolo RS232 con una velocidad de 115200bps y un formato 8N1 se logró establecer una comunicación efectiva con la herramienta simulink. Adicionalmente, con una tasa de muestro de 3ms se pudo realizar una lectura óptima de las mediciones de los sensores, el envío y recepción de información, sin perdidas de datos y/o enlaces de comunicación..
(56) BIBLIOGRAFÍA. Ariki, M. (s.f.). Control Systems, Robotics, and Automation-PID control. Encyclopedia of Life Suport Systems, 2. EIA standard RS-232-C. (1969). Interface between Data Terminal Equipment and Data Communication Equipment Employing Serial Binary Data Interchange. Electronic Industries Association, Engineering Dept, Washington. Escobar, A., & Poveda, L. (2014). Metodología de identificación de procesos. Artículo. Esther, F. U. (Febrero de 2015). ISN Blog. International Relations and Security Network. Obtenido de Civilian Drones: Fixing an Image Problem?: http://isnblog.ethz.ch/security/civilian-dronesfixing-an-image-problem. Euler, L. (1776). Translatione Qvacvnqve Corporvm Rigidorvm. Novi Commentarii academiae scientiarum Petropolitanae, 20, 189–207. Hobby King. (s.f.). 20A UBEC 30A UBEC User Manual. Manual de usuario. Jaramillo, F., & Gómez, A. (2013). Sistema de control para la estabilidad y orientación de un helicóptero quadrotor. Tesis de grado, Escuela de Ingeniería de Antioquia, Envigado. Mazzone, V. (s.f.). Controladores PID. Recuperado el Abril http://www.eng.newcastle.edu.au/~jhb519/teaching/caut1/Apuntes/PID.pdf MIT.. de. 2016,. de. (s.f.). Recuperado el Abril de 2016, de Linear Quadratic Regulator: http://ocw.mit.edu/courses/mechanical-engineering/2-154-maneuvering-and-control-of-surfaceand-underwater-vehicles-13-49-fall-2004/lecture-notes/lec19.pdf.. Ogata, K. (2010). Ingeniería de control moderno (5ta ed.). Prentice Hall. Prieto, E. (2015). Control de posición de un balancín Motor-Hélice. researchgate, 14. Quanser. (2006). Aerospace Plant: 2-DOF Helicopter, Position Control. Manual de usuario. Sándor, K. (2014). Gyroscope. http://demonstrations.wolfram.com/Gyroscope.. Obtenido. de. Demosntrations:. Sedoon, J. (1990). Basic Helicopter Aerodynamics. (B. p. books, Ed.) Oxford. Serway, R., & Jewett, J. W. (2004). Physics for Scientists and Engineers (Sexta ed.). Brooks/Cole. Solaque G., L., Cristancho, C., & Gil C., C. (2014). Diseño e implementación de una plataforma experimental de dos grados de libertad controlada por dos técnicas: PID y lógica difusa. Ciencia e Ingeniería Neogranadina, 24(1), 99-115..
(57) Universita’ Degli Studi di Siena. (2010). Dipartimento di Ingegneria dell’Informazione e Scienze Matematiche. CE150 Helicopter Model. Manual de uso. Yedamale, P. (2010). Brushless DC (BLDC) Motor Fundamentals..
(58)
Figure




+7





Documento similar
Entre nosotros anda un escritor de cosas de filología, paisano de Costa, que no deja de tener ingenio y garbo; pero cuyas obras tienen de todo menos de ciencia, y aun
En un congrés, convé disposar d’un pla o full de ruta per tal de garantir la igualtat d’accés de totes les persones, tant ponents com participants.. Comunicació : Tant si el
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
En cada antecedente debe considerarse como mínimo: Autor, Nombre de la Investigación, año de la investigación, objetivo, metodología de la investigación,
El desarrollo de una conciencia cáritas es esencial para identificar cuando un momento de cuidado se convierte en transpersonal, es necesaria para identificar
El quincenario de los frailes de Filipinas, condena para el Archipiélago los propósitos de nivelación jurídica que para todo territorio español, peninsular o ultramarino, se
Las lecturas de francobordo/calado se toman para establecer la posición de la flotación y determinar a su vez el desplazamiento del buque en el momento de realizar la prueba
