12º CONGRESO IBEROAMERICANO DE INGENIERÍA MECANICA
Guayaquil, 10 a 13 de Noviembre de 2015
ALGORITMOS MEMÉTICOS PARA DISEÑO DE MECANISMOS
Portilla-Flores E. A.1, Vega-Alvarado E.1, 2, Niño-Suarez P. A.3, Santiago-Valentín E.1, Calva-Yáñez M. B.3, Calderón-Romero F.3
1CIDETEC-IPN, Av. Juan de Dios Bátiz s/n Esq. Miguel Othón de Mendizabal, Unidad Profesional Adolfo
López Mateos, C.P. 07700, D.F., México
[email protected], [email protected], [email protected]
2Universidad Autónoma de Tlaxcala, Facultad de Ciencias Básicas, Ingeniería y Tecnología, Calzada
Apizaquito s/n. C.P. 90300 Apizaco, Tlaxcala, México
3SEPI-ESIME-IPN Unidad Azcapotzalco, Av. Granjas 682, Col. Santa Catarina, C.P. 02250, D.F., México
[email protected], [email protected], [email protected]
RESUMEN
Los algoritmos meméticos son metaheurísticas híbridas, compuestas por técnicas de búsqueda global tipo poblacional combinadas con algoritmos de búsqueda local. Si bien originalmente su uso se enfocó a casos de optimización de tipo combinatorio, hoy en día existe una amplia gama de desarrollos destinados a resolver problemas de tipo numérico con o sin restricciones, mono o multi-objetivo, estáticos o dinámicos, entre otros. En este trabajo se presenta un algoritmo memético (MemMABC) como herramienta para diseño en ingeniería, utilizándose en un caso de estudio para la síntesis óptima de un efector final tipo pinza de dos dedos (gripper). MemMABC utiliza el algoritmo modificado de colonia de abejas (MABC) como buscador global, y una variación del algoritmo de caminata aleatoria (RW) para la búsqueda local; ambos algoritmos fueron adaptados para manejar restricciones mediante las reglas de factibilidad de Deb. El diseño de grippers es un buen ejemplo de problemas de optimización dura, siendo utilizados en una amplia variedad de aplicaciones robóticas. La simulación de los resultados obtenidos muestra una alta precisión en el control de la sujeción a lo largo del espacio de trabajo del mecanismo diseñado, demostrando que MemMABC puede aplicarse exitosamente para resolver problemas de ingeniería del mundo real.
INTRODUCCIÓN
Los efectores finales son sistemas montados en los extremos de los robots para realizar diversos trabajos tales como perforar, soldar o calentar. De acuerdo al tipo de manipulación las tareas de un robot se clasifican como gruesas o finas [1], y requieren de herramientas especializadas o de manos (grippers), respectivamente. Existen diferentes manos robóticas, de acuerdo con las características de los objetos a manipular, del actuador implementado y de la destreza y fuerza requeridas; aunque pueden tener cualquier número de dedos, la mano más común en las implementaciones reales es la pinza de dos dedos con un grado de libertad [2].En ingeniería mecánica síntesis se entiende como el proceso de diseño de una máquina o sistema mecánico [3]. La síntesis dimensional de un mecanismo es determinar las medidas de sus elementos necesarios para realizar los movimientos deseados [4]; en el presente trabajo se aborda la síntesis dimensional de un efector final tipo pinza.
Existen aplicaciones del mundo real tales como el diseño de manipuladores, donde es imposible encontrar soluciones óptimas con una cantidad viable de recursos aplicando técnicas clásicas (análisis gráfico, métodos numéricos). Estos casos son de optimización dura: problemas que no se pueden solucionar de manera óptima o hasta un límite establecido usando métodos determinísticos. Las metaheurísticas están diseñadas para resolver de manera aproximada problemas de optimización dura, con base en prueba y error. Las metaheurísticas basadas en población parten de un conjunto de soluciones propuestas para encontrar el valor óptimo de un problema. Las dos tareas de una metaheurística son la exploración (diversificación) y la explotación (intensificación) [5]; las técnicas tipo población son buenas para diversificar, pero deficientes en la intensificación [6]. Se han desarrollado diversas opciones para solventar esta debilidad, destacando los algoritmos meméticos por su combinación sinérgica de la búsqueda global de la metaheurística de población con el refinamiento de un buscador local (LS) [7], [8].
Diversos trabajos en la literatura relacionada tratan el diseño de manos robóticas [9], [10], [11], pero solo en algunos de ellos se han desarrollado modelos matemáticos. Zhang et al [12] realizaron la síntesis dimensional de un manipulador con un mecanismo de cinco barras y un problema de optimización numérica con restricciones, desarrollando un método gráfico para evitar la complejidad de programar y calcular una solución óptima. En [13] se presenta un procedimiento para diseño óptimo de un efector con dos dedos, resuelto como un problema multiobjetivo con restricciones usando la rutinaminimax del MATLAB Optimization Toolbox®. En [14] se establece un modelo de una pinza con dedos paralelos, resuelto como problema multiobjetivo con el algoritmo genético. El diseño de una mano robótica se muestra en [15], tomando como criterio de optimización la reducción del peso del efector y de la longitud de sus dedos, para aumentar la aceleración y evitar la desviación. Chica et al [16] desarrollaron la síntesis dimensional de un efector final de dos dedos para manipular botellas en una máquina embotelladora, con base en un mecanismo de cuatro barras optimizado con el algoritmo de evolución diferencial. En este trabajo se propone una solución novedosa con un algoritmo memético, MemMABC, para la síntesis de mecanismos; adicionalmente se presenta como caso de estudio un modelo para un efector tipo pinza de dos dedos. MemMABC es una combinación del algoritmo modificado de colonia artificial de abejas (MABC) y el algoritmo de caminata aleatoria (RW). El documento está organizado como sigue: en el punto 2 se describe el problema de síntesis del mecanismo, incluyendo una breve explicación de la cinemática. En el punto 3 se analizan las estrategias de optimización y el caso de estudio. En el punto 4 se presenta el algoritmo aplicado, con especial énfasis en su implementación computacional. Finalmente, los resultados de las simulaciones realizadas se reportan en el punto 5, mientras que las conclusiones se incluyen en el punto 6.
SÍNTESIS ÓPTIMA DE UN EFECTOR FINAL
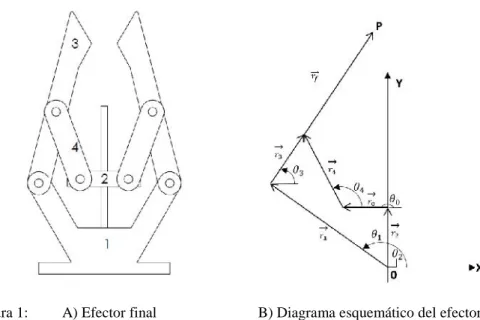
Sea el efector final tipo pinza que se muestra en la Figura 1A, integrado por los elementos siguientes: (1) pieza base, (2) tornillo de potencia y tuerca, (3) eslabón de agarre y (4) eslabón de acoplamiento. Su operación se describe a continuación: fijando un sistema de referencia en la pieza base, la posición mínima de agarre ocurre cuando el desplazamiento de la tuerca es cero, es decir, si la posición del elemento (2) es mínima respecto al origen del sistema; así mismo, la posición máxima se obtiene cuando la distancia entre la tuerca y el sistema coordenado es máxima. Una vez cumplida la condición del rango de apertura del efector se debe asegurar una fuerza de agarre constante sobre el objeto de interés.
En la Figura 1B se observa el diagrama esquemático del efector final propuesto, donde cada vector está relacionado con el i-ésimo eslabón. Del mecanismo se establece la ecuación de cierre de circuito como:
+ = + + (1) Aplicando notación polar a cada término de la Ec. (1) se obtiene:
Figura 1: A) Efector final B) Diagrama esquemático del efector final
Usando la ecuación de Euler en la Ec. (2) y separando las partes real e imaginaria:
cos θ = + cos θ + cos θ (3)
sen θ + sen θ = + sen θ
La posición angularθ se genera expresando el lado izquierdo del sistema de ecuaciones (3) en términos deθ :
cos θ + cos θ = − + cos θ (4)
sen θ = sen θ + sen θ −
Elevando al cuadrado la Ec. (4) y sumando sus términos se obtiene la ecuación compacta de Freudenstein [3]:
cos θ + sen θ + = 0 (5)
donde:
= 2 ( + cos θ ) (6)
= 2 ( sen θ − ) (7)
= + + + − + 2 cos θ − 2 sen θ (8)
El ánguloθ puede calcularse en función de los parámetrosA,ByC, expresandosen θ ycos θ en términos detan (θ3/2)y sustituyendo en la Ec. (5), con lo que se obtiene una ecuación lineal de segundo orden:
[C ̶A] tan2(θ3/2) + [2B] tan (θ3/2) +A+C= 0 (9)
Resolviendo la Ec. (9), la posición angularθ esta dada por:
θ = 2 arctan[− ± √ +− − ] (10)
Un procedimiento similar se lleva a cabo paraθ , obteniéndose:
θ = 2 arctan[− ± √ −+ − ] (11)
= −2 ( + cos θ ) (12)
= 2 ( − sen θ ) (13)
= + + + − + 2 cos θ − 2 sen θ (14)
Finalmente, la posición de los extremos del efector finalPestá dada por:
= cos θ + cos θ (15)
= sen θ + sen θ (16)
Análisis de Fuerzas en el Efector Final
Como se mencionó previamente, un aspecto fundamental en el diseño del efector final se relaciona con la fuerza de agarre y/o su transmisión. La Figura 2 muestra la distribución de fuerzas en los elementos mecánicos del efector, dondePrepresenta la fuerza de entrada o impulsión del sistema,FTes la fuerza de agarre ejercida por el efector sobre el objeto de interés yFkjes la fuerza que ejerce elk-ésimo elemento sobre elj-ésimo.
Figura 2: Diagrama de la distribución de fuerzas en el efector final
Como se observa:
= (17)
= (18)
= /(2sen θ) (29)
θ = π − θ (20)
Tomando el momento de fuerza respecto del puntoAy considerandoΣ = 0:
=2 sen θ sen θcos(θ − θ ) (21)
ESTRATEGIAS DE OPTIMIZACIÓN
Un criterio para cuantificar el desempeño del efector final es que la fuerza de sujeción debe ser constante en todo el espacio de trabajo. Ya que la posición del extremo del efector depende de la tuerca en el tornillo de potencia, se requiere entonces una fuerza constante en los extremos de máximo y mínimo desplazamiento. Proponiendo la función objetivo de la Ec. (22), ésta debe tener un valor mínimo para asegurar una fuerza casi constante en todo el espacio de trabajo, siendo cero su valor ideal.
( ) = ( ) − ( ) (22)
Finalmente, se debe definir el espacio de trabajo del efector, considerando:XminyXmax, dimensiones mínima y máxima del objeto de interés;XG, rango máximo de desplazamiento de los extremos del efector;r2miny r2max, valores mínimo y máximo de la posición de la tuerca; yR2max, rango de variación de la posición de la tuerca.
El efector final es la interfaz entre un sistema mecánico y el mundo real; para la interacción entre ambos se debe asegurar la sujeción apropiada en las posiciones mínima y máxima del espacio de trabajo, es decir:
( ) ≤ (23)
( ) ≥ 0 (24)
( ) ≥ (25)
( ) ≤ (26)
Tomando una geometría esférica del objeto a asir, se debe cumplir que la coordenadaPydel extremo del efector sea mayor a la dimensión máxima del objeto más el rango de variación del tornillo de potencia y la tuerca, esto es:
( ) ≥ + (27)
Variables de diseño
Sea el vector de variables de diseño para el efector finalp, establecido como:
p =[p1,p2,p3,p4,p5,p6,p7,p8]T = [r1,r2min,r2max,r3,r4,r0,rf, θ1]T (28)
donder1,r3,r4,r0,rf son los tamaños de las barras del mecanismo;r2min,r2maxson las posiciones de la tuerca en la mínima y máxima apertura, y al igual que el grupo anterior se miden en unidades genéricas de longitud, mientras queθ1es el ángulo del extremo de la base respecto al origen del sistema coordenado y sus unidades son radianes.
Caso de estudio: síntesis de un efector final tipo pinza para transmisión óptima de fuerza
Este caso de estudio se seleccionó por su complejidad; una medida de la complejidad de un problema de optimización es el parámetroρ, que corresponde a la relación entre la zona factible y el espacio de búsqueda, y que puede representarse como el porcentaje de soluciones factibles encontradas en un número arbitrariamente grande de vectores solución generados aleatoriamente [17]. Conforme disminuye el valor deρ aumenta el esfuerzo
computacional requerido por el algoritmo de solución del problema, dado que existen menos soluciones
disponibles. Para evaluar ρ en este problema específico se tomó un millón de soluciones aleatorias propuestas, y
solamente dos de ellas resultaron factibles, resultando en un valor de ρ = 0.0002%.
Sea el problema de optimización numérica mono-objetivo descrito por las Ecs. (29) a (40), para obtener la solución al problema de diseño de síntesis para la transmisión óptima de fuerza del efector final:
( ) = ( ) − ( ) , pϵR8 (29)
con las cotas:
0 ≤ pi ≤ 150,i= 1, 4, 5, 6, 7 (30)
0 ≤ pi ≤R2max,i= 2, 3 (31)
π/2 ≤ pi ≤π ,i= 8 (32) sujeto a:
g1(p) = |Px(r2min)| ̶Xmin ≤ 0 (33)
g2(p) = ̶ |Px(r2min)|≤ 0 (34)
g3(p) = |Px(r2max)| ̶XG ≤ 0 (35)
g5(p) =Xmax+R2max ̶ Py(r2max) ≤ 0 (37)
g6(p) =p2 ̶p3 ≤ 0 (38)
g7(p) =p4 ̶p7 ≤ 0 (39)
y con el espacio de trabajo:
Xmin= 20,Xmax= 150,XG= 200,R2max= 50 (40)
ALGORITMO DE OPTIMIZACIÓN
En este desarrollo se diseñó un algoritmo memético tomando al MABC [18] como base para la búsqueda global, adaptado para incluir una etapa de búsqueda local (LS) activada por tiempo (medido en generaciones). El disparo para las etapas de LS es controlado por una variable, Frecuencia, la cual indica el periodo entre un evento de LS y otro, en términos de un número de ciclos o generaciones. Aunque en el MABC original la condición de paro se basa en el número de iteraciones, MemMABC utiliza como criterio un número fijo de evaluaciones de la función objetivo; esto permite una comparación justa [19] con otros algoritmos.
En esta implementación, el punto de inicio para las etapas de LS es la mejor solución encontrada hasta ese momento por la búsqueda global. El algoritmo de LS es la caminata aleatoria (RW), adaptada para manejar problemas con restricciones, y se seleccionó debido a su simplicidad, derivada de ser un método directo de optimización de orden cero. La intensidad o profundidad de la búsqueda local es controlada mediante el parámetro MaxCount, que indica el número máximo de evaluaciones de la función objetivo en cada activación de LS.
La mayoría de los algoritmos de optimización fueron diseñados originalmente para resolver problemas sin considerar restricciones, por lo que se han desarrollado diversas estrategias para el manejo de las mismas. Por ello, los algoritmos de búsqueda global y local en MemMABC se complementaron con las reglas de Deb [20]; estos criterios mejoran el proceso de selección de soluciones al escoger al individuo más factible en lugar de simplemente tomar al de mejor función objetivo.
Implementación computacional
Para su ejecución, MemMABC requiere de seis parámetros definidos por el usuario: MCN, número máximo de generaciones; SN, el número de fuentes de alimento o soluciones posibles; MaxEvs, el número máximo de evaluaciones de la función objetivo; Frequencia, el intervalo en número de generaciones requeridas para la activación de la búsqueda local; MaxCount, la profundidad o número máximo de evaluaciones de la función objetivo en la LS, y el número máximo de intentos consecutivos de mejora para una solución antes de que sea reemplazada por agotamiento, MaxLimit. Este último parámetro se calcula como:
MaxLimit = SN * n (41)
donde n es el número de variables de diseño.
La implementación del algoritmo propuesto para las corridas de prueba se programó en MATLAB R2013a®, y las simulaciones se efectuaron en una plataforma computacional con las características siguientes: microprocesador Intel Core [email protected] GHz, 8GB de memoria RAM y sistema operativo Windows 8. Todas las ejecuciones del algoritmo se hicieron con los siguientes valores de parámetros: MaxEvs = 35,000, MCN = 2,500, SN = 5, Frecuencia = 1,650, MaxCount = 8,500, y MaxLimit = 40, calculado de la Ec. (41).
ANÁLISIS DE RESULTADOS
Se ejecutaron treinta simulaciones independientes para cada uno de los métodos: MemMABC, MABC y SQP; los diez mejores resultados se muestran en la Tabla 1. Los algoritmos se configuraron para detenerse a las 35,000 evaluaciones de la función objetivo, o antes si se alcanzaba un valor óptimo deFO= 0; así mismo, se programaron para generar una soluciónFO= 1000 si en una corrida específica no se encuentra al menos una solución factible.
SQP es uno de los mejores métodos determinísticos para la solución de problemas de optimización; el algoritmo parte de un punto inicial e iterativamente genera direcciones de búsqueda, para localizar puntos vecinos de comparación y posible mejora. Para el caso de estudio seleccionado SQP se implementó utilizando la función
los resultados correspondientes a los otros algoritmos. Una de las razones de este comportamiento es la sensibilidad de SQP hacia el punto inicial, especialmente si el problema es altamente restringido o de dimensionalidad alta.
Tabla 1: Resultados de las diez mejores corridas de simulación
MemMABC MABC SQP
F.O. Evals F.O. Evals F.O. Evals
Simulación
1 0 15839 0 17813 9.83E-17 35000
2 0 22961 0 18812 0.002 35000
3 0 23058 0 19589 1000 35000
4 0 23068 0 20144 1000 35000
5 0 23177 0 25001 1000 35000
6 0 23224 0 25554 1000 35000
7 0 23229 0 25658 1000 35000
8 0 23288 0 25965 1000 35000
9 0 23294 0 26722 1000 35000
10 0 23350 0 26860 1000 35000
Por lo anterior, los valores mostrados en la Tabla 2 y el análisis estadístico de la Tabla 3 se basan exclusivamente en los resultados generados por MemMABC y MABC. Como puede observarse, el valor mínimoFO= 0 se obtuvo con ambas metaheurísticas, pero MemMABC tuvo un mejor rendimiento ya que alcanzó este valor después de 15,839 evaluaciones de la función objetivo, aproximadamente un 12% menos que las 17,813 requeridas por MABC en su mejor simulación. La Tabla 2 muestra los vectores de diseño correspondientes a las tres mejores corridas de cada algoritmo; por limitaciones de espacio, las cantidades se muestran utilizando sólo cuatro dígitos decimales, aunque en las simulaciones se calcularon con catorce lugares decimales. Los primeros seis parámetros en la Tabla 3 se obtuvieron a partir de los valores de la función objetivo, mientras que los dos restantes se derivan del número de evaluaciones de la misma. Dado que la varianza mide la dispersión de un conjunto de variables aleatorias con respecto a su media aritmética, el análisis estadístico muestra una operación estable de ambos algoritmos; sin embargo, los resultados y las estadísticas para MemMABC son todos mejores que los valores correspondientes de MABC, y se obtuvieron con un número promedio menor de evaluaciones de la función objetivo.
Tabla 2: Mejores tres vectores de diseño obtenidos
MemMABC MABC
1 2 3 1 2 3
Variable
r1 123.7098 133.4725 114.6602 115.4636 135.4385 141.7628
r2min 1.2633 11.4741 19.6297 20.1385 5.2567 4.0313
r2max 44.5135 47.7958 49.5046 49.0498 49.7269 48.9223
r3 59.2174 26.089 49.8458 31.584 36.3616 43.9282
r4 131.7432 120.2975 106.8188 112.0447 105.8018 143.1385
r0 18.278 13.3991 26.9709 5.3617 35.3777 6.8264
rf 149.1273 148.8266 149.7575 149.3967 144.3579 149.9694
Tabla 3: Comparación estadística entre MemMABC y MABC
MemMABC MABC
Parámetro
Mínimo 0 0
Máximo 0.005217781 0.006262389
Mediana 0 0
Promedio 0.00058323 0.000772418
Varianza 1.38E-06 3.21E-06
Desviación Estándar 0 0.001791967
Mínimo Evaluaciones 15839 17813
Promedio Evaluaciones 27731.3 29748.8
CONCLUSIONES
En este trabajo se presenta una propuesta novedosa de un algoritmo memético de optimización para problemas de ingeniería del mundo real, usando una combinación de los algoritmos MABC y caminata aleatoria; el memético, MemMABC, se aplicó para resolver el modelo de un efector final tipo pinza de dos dedos. Aunque el caso de estudio es la síntesis dimensional de una mano robótica, la simplicidad y flexibilidad del algoritmo propuesto facilita su uso para el diseño de otros mecanismos, si se realiza adecuadamente el modelado correspondiente.
Considerando los resultados obtenidos se puede establecer que MemMABC produce buenas soluciones desde el punto de vista del diseño en ingeniería, tanto por su calidad como por el total de evaluaciones de la función objetivo requeridas para su obtención; en este último criterio, el algoritmo propuesto mejora el desempeño del MABC. Por otra parte, MemMABC es un algoritmo simple con una combinación sinérgica de elementos, que no requiere demasiados recursos de cómputo para su implementación.
La configuración inicial del algoritmo requiere atención especial ya que una sintonización fina de los mismos puede llevar a mejores resultados, considerando tanto los valores iniciales de sus parámetros como el control de los mismos durante la ejecución. Finalmente, el trabajo principal a futuro para este desarrollo es convertir al MemMABC en un algoritmo adaptivo, con la capacidad de modificarse a sí mismo incorporando conocimiento en un proceso de autoadaptación. Esto implica la aplicación de nuevas técnicas para la búsqueda local, y el implementar la inteligencia requerida para el proceso de aprendizaje.
AGRADECIMIENTOS
Los autores agradecen al Instituto Politécnico Nacional de México por su apoyo a través de la Secretaría de Investigación y Posgrado (SIP), con el proyecto de investigación SIP-20151320.
REFERENCIAS
1. C. W. de Silva, Mechatronics: an Integrated Approach, CRC Press, New York (2005). 2. J. M. Rosário, Principios de Mecatrónica, Prentice Hall, Sao Paolo (2005).
3. J. E. Shigley y J. J. Uicker Jr., Teoría de Máquinas y Mecanismos, McGraw Hill, México (1988).
4. R.L. Norton: Diseño de Maquinaria, una Introducción a la Síntesis y al Análisis de Mecanismos y Máquinas, McGraw Hill, México (1995).
5. X. Yang, Harmony Search as a Metaheuristic Algorithm, in Music-Inspired Harmony Search Algorithm: Theory and Applications, Studies in Computational Intelligence, Z.W. Geem (Ed.), Springer Berlin, vol. 191, pp. 1-14, (2009).
7. S. Domínguez-Isidro, E. Mezura-Montes and G. Leguizamón, Memetic Differential Evolution for Constrained Numerical Optimization Problems, in Proceedings of 2013 IEEE Congress on Evolutionary Computation, pp. 2996-3003, DOI: 10.1109/CEC.2013.6557934 (2013).
8. N. Krasnogor, Memetic Algorithms, in Handbook of Natural Computing, G. Rosenberg, T. Back and J. Kok (Eds.), Springer Berlin, vol. 2, pp. 905-936, (2012).
9. R. Alqasemi, S. Mahler and R. Dubey, Design and Construction of a Robotic Gripper for Activities of Daily Living for People with Disabilities, in Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, Noordwijk, Netherlands, pp. 432-437, DOI: 10.1109/ICORR.2007.4428461 (2007). 10. R. Chattaraj, S. Bhattacharya, B. Bepari and S. Bhaumik, Design and Control of Two Fingered Compliant Gripper for Micro Gripping, in Proceedings of the 3rd International Conference on Informatics, Electronics and Vision, pp. 1-6, DOI: 10.1109/ICIEV.2014.6850840 (2014).
11. F. Samavati, A. Feizollahi, P. Sabetian and S. Moosavian, Design, Fabrication and Control of a Three-Finger Robotic Gripper, in Proceedings of the 2011 First International Conference on Robot, Vision and Signal Processing, Taiwan, pp. 280-283, DOI: 10.1109/RVSP.2011.62 (2011).
12. Y. Zhang, F. Gao, Y. Zhang and W. A. Gruver, Dimensional Synthesis of a Flexible Gripper with a High Degree of Stability, in Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, 1996, (Volume:2 ), Beijing, China, pp. 1025-1030, DOI: 10.1109/ICSMC.1996.571221 (1996).
13. C. Lanni and M. Ceccarelli, An Optimum Design Algorithm for Mechanisms in Two-Finger Grippers, in Proceedings of the 13th WSEAS International Conference on Systems, pp. 63-70, DOI: 10.2174/1874155X00903010049 (2009).
14. S. Xiao, Y. Li and Y. Zhao, Optimal Design of a Novel Micro-Gripper with Completely Parallel Movement of Gripping Arms, in Proceedings of the IEEE 5th International Conference on Robotics, Automation and Mechatronics, September 17-19, Qingdao, China, pp. 35-40, DOI: 10.1109/RAMECH.2011.6070452 (2011). 15. R. Chouhan, F. Kanwal, S. Ali and N. Ali, Design and Development of a Prototype Robotic Gripper, in Proceedings of the 2014 International Conference on Robotics and Emerging Allied Technologies in Engineering (iCREATE), Islamabad, Pakistan, pp. 317-320, DOI: 10.1109/iCREATE.2014.6828387 (2014). 16. A. Chica-Leal, V. Prada-Jiménez, H. Rey-Hernández and C. León-Hidalgo, Design and Construction of a Gripper Implementing Optimization, in Proceedings of the Second International Conference on Advanced Mechatronics, Design, and Manufacturing Technology - AMDM, Bogotá, Colombia, pp. 219-222, (2014). 17. J. Liang, T. Runarsson, E. Mezura-Montes, M. Clerc, P. Suganthan, C. Coello Coello and K. Deb, Problem
Definitions and Evaluation Criteria for the CEC 2006, Special Session on Constrained Real-Parameter Optimization, Technical Report, Nanyang Technological University, Singapore, (2006).
18. E. Mezura-Montes y O. Cetina-Domínguez, Empirical Analysis of a Modified Artificial Bee Colony for Constrained Numerical Optimization, Applied Mathematics and Computation, (218), pp. 10943{10973, DOI: 10.1016/J.AMC.2012.04.057 (2012).
19. M. Mernik, S. Liu, D. Karaboga and M. Crepinsek, On Clarifying Misconceptions when Comparing Variants of the Artificial Bee Colony Algorithm by Offering a New Implementation, Information Sciences, 291, pp. 115{127, pp. 1-14, DOI: 10.1016/J.INS.2014.08.040 (2015).