I
I
N
N
S
S
T
T
I
I
T
T
U
U
T
T
O
O
P
P
O
O
L
L
I
I
T
T
É
É
C
C
N
N
I
I
C
C
O
O
N
N
A
A
C
C
I
I
O
O
N
N
A
A
L
L
E
Essccuueellaa SSuuppeerriioorr ddee IInnggeenniieerrííaa MMeeccáánniiccaa yy EEllééccttrriiccaa Unidad Profesional “Adolfo López Mateos”
“APLICACIONES DEL PLC EN EL CONTROL
Y PROTECCIÓN DE MOTORES”.
T E S I S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO
ELECTRICISTA
P R E S E N T A N
P
P
e
e
r
r
e
e
g
g
r
r
i
i
n
n
a
a
B
B
a
a
r
r
c
c
e
e
n
n
a
a
s
s
J
J
a
a
v
v
i
i
e
e
r
r
.
.
N
N
a
a
v
v
a
a
r
r
r
r
o
o
Y
Y
a
a
ñ
ñ
e
e
z
z
R
R
a
a
f
f
a
a
e
e
l
l
A
A
l
l
b
b
e
e
r
r
t
t
o
o
.
.
Doy gracias a Dios por haberme dado la dicha de existir, y al mismo tiempo por permitirme lograr desarrollarme como persona y como estudiante.
Sin duda el mayor de mis tesoros es mi familia, la que me ha visto crecer y por la cual he obtenido mis mayores logros, y cumplido todos y cada uno de los objetivos que me he planteado, gracias a que me han sabido comprender, valorar y querer, he llegado hasta el punto en el cual me encuentro. A mi querida Madre, con quien estoy sumamente agradecido por todo aquel esfuerzo que toda su vida ha hecho para sacar adelante a sus queridos hijos, y por depositarme tanta confianza y apoyo para lograr lo que me he propuesto, lo cual jamás defraudaré y corresponderé en el futuro, por tal y miles de razones le dedico esta tésis con todo el cariño del mundo, de la misma forma a mi hermana quien también ha aportado bastante para salir adelante con todo lo que nos hemos propuesto, y a ti Padre que desde el cielo nos velas el sueño y todo lo que realizamos, sé que estarías orgulloso de ver lo que ahora somos, gracias a que nos enseñaste a ser leales, francos, sinceros, trabajadores e inteligentes, solo te pido que desde donde estés nos cuides, nos protejas y no olvides que te extraño, gracias por formarme y permitirme ser quien soy.
A la familia López Peregrina por su grandísimo apoyo y confianza, sobre todo por su inconfundible relación para conmigo y por permitirme ser parte de uno de ellos, desde el fondo de mi corazón mil gracias por todo.
Al Instituto Politécnico Nacional por la gran capacidad para la formación de ingenieros, por lo cual me estoy orgulloso de ser parte politécnica.
A mis grandes amigo Maritza Panohaya, e Irving Gutiérrez, un profundo agradecimiento por su apoyo y confianza, ya que son excelentes compañeros de trabajo y sé que algún día triunfarán como buenos profesionistas.
Mil gracias a todos los antes mencionados…
A mi madre, Hilda:
Que todo su esfuerzo y cariño ha sido para que salga adelante ya que aunque los tiempos hayan sido malos ella siempre me brindaba todo lo que yo necesite aunque no se lo pidiera, dios te bendiga madre.
A mi hermano, Jesús:
Quien siempre me ayuda brindándome sus conocimientos y me apoya en todo pues hace que las cosas se han más fáciles.
A mi tío, Arturo:
Quien siempre me apoyo académicamente, fue mi ejemplo a seguir a sido mi maestro ya que sin el tal vez nunca me hubiera metido a la escuela, pues el me ayudo a salir adelante.
A mi abuelita, Socorro:
Que con su amor y ternura me ha enseñado lo hermoso de vivir, ella que siempre todo me da con amor y sus consejos para ser un hombre de bien.
A mi tío, Jaime:
El que siempre me ayudo dándome palabras de aliento, diciéndome que todo en la vida se puede lograr teniendo bien enfocado lo que se quiere lograr.
A mi tía, Mimi:
Ella tan linda siempre hace todos con su dulzura y apoyándome en todo lo que necesitara.
C
C
O
O
N
N
T
T
E
E
N
N
I
I
D
D
O
O
.
.
Pag.
OBJETIVO. i
RESÚMEN. ii
INTRODUCCIÓN. iii
CAPITULO 1. Lógica Electrónica. 1
1.1. Sistemas Digitales. 1
1.1.1. Ventajas de las Técnicas Digitales. 1 1.1.2. Acotaciones de las Técnicas Digitales. 2 1.1.3. Ejemplo de Sistema Digital (PC). 4
1.2. Compuertas Lógicas. 6
1.2.1. Tablas de Verdad. 6
1.2.2. Compuertas OR. 8
1.2.3. Compuertas AND. 10
1.2.4. Compuertas NOT. 11
1.2.5. Compuertas NOR. 12
1.2.6. Compuertas NAND. 13
1.2.7. Circuitos Lógicos. 14
1.2.8. Respuestas de Circuitos Lógicos. 16 1.2.9. Traspolación de Expresiones Booleanas a Circuitos. 18
1.2.10. Teoremas. 19
1.2.10.1. Teoremas booleanos 19
1.2.10.2. Teoremas con Variables Múltiples. 21 1.2.10.3. Teoremas De Demorgan. 23 1.2.10.4. Implicaciones de los Teoremas de Demorgan. 23
1.3. Flip Flop. 25
CAPITULO 2. Controles Electromagnéticos. 28
2.1. Circuitos Lógicos Utilizando Relevadores Magnéticos. 28
2.2. La lógica de Estado Sólido en Comparación con la Lógica de Relevadores. 31
2.3. Controladores. 33
2.3.1. Funciones del Control. 34
2.3.2. Funciones de Protección. 34
2.3.3. Tipos de Controladores. 35
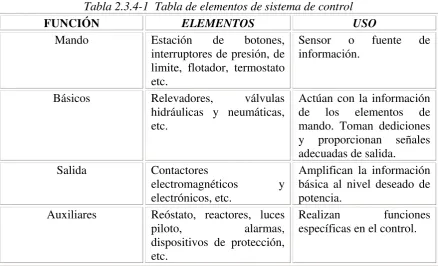
2.3.4. Elementos de Mando. 36
2.4. Contactores. 40
2.5. Relevadores. 41
2.6. Introducción a los Diagramas y Símbolos. 45
2.6.1. Diagrama de Alambrado y Diagrama Esquemático. 47 2.6.2. Elaboración de Diagramas de Escalera en Forma Secuencial. 47
CAPITULO 3. Programación y operación del PLC. 50
3.1. Breve Historia del PLC. 50
3.1.1. Definición. 51
3.1.2. Principio de Funcionamiento. 51
3.1.3. Estructura. 52
3.1.4. Clasificación. 52
3.1.5. Evolución. 53
3.1.6. Ventajas y Aplicaciones. 53
3.2. Funciones y Programación del PLC. 54
3.2.1. Sistemas de Entradas y Salidas. 54 3.2.2. Aspectos de Configuración. 57 3.2.2.1. Lenguajes de Programación. 57 3.2.2.2. Diagramas de Escalera. 57
3.2.3. Ciclo del CPU. 59
CAPITULO 4. Aplicaciones del PLC en Sistemas de Control Eléctrico. 61
4.1. Circuitos de Contactos. 61
4.2. Direccionamientos. 62
4.3. Conexión y Programación. 63
4.3.1. Conexión. 63
4.3.2. Programación. 65
4.4. Aplicación del PLC en el Control de Motores. 71
4.5. Control Integral de un Invernadero Monocultivo. 77
4.5.1. Descripción de los Procesos. 77
4.5.1.1. Control Climático. 77
4.5.1.4. Marcas Auxiliares, Temporizadores y Contadores. 84
4.5.1.5. Módulos. 84
4.5.1.6. Programa de Control STEP5. 86 4.5.1.7. Simulación del Sistema con PROSIMAX. 86
4.5.2. Estudio Económico. 89
CONCLUSIONES. 90
BIBLIOGRAFÍA. 91
O
O
B
B
J
J
E
E
T
T
I
I
V
V
O
O
G
G
E
E
N
N
E
E
R
R
A
A
L
L
.
.
Estimar las aplicaciones más significativas del controlador lógico programable (PLC) en el control y protección de motores, que permita proyectar las bondades de su uso en la optimización del proceso de operación de los motores eléctricos.
O
OBBJJEETTIIVVOOSSPPAARRTTIICCUULLAARREESS..
• Analizar los sistemas tradicionales de control electromagnético y realizar analogías respecto a la electrónica lógica digital.
• Estudiar la programación del PLC, así como su debida operación.
• Realizar estudio de casos de aplicaciones significativas del PLC, y sus analogías electromecánicas.
R
R
E
E
S
S
Ú
Ú
M
M
E
E
N
N
.
.
Este trabajo permite tener una visión general de la gama de aplicaciones del PLC, de manera especifica aquí se enfoca al control y protección de motores con una aplicación puntual en un invernadero de monocultivo. El trabajo inicia con una descripción de los sistemas digitales, donde se desglosa la lógica electrónica, haciendo una analogía con dispositivos electromagnético, resaltando sus ventajas y desventajas.
I
I
N
N
T
T
R
R
O
O
D
D
U
U
C
C
C
C
I
I
Ó
Ó
N
N
.
.
La automatización es un sistema donde se trasfieren tareas de producción, referidas al control de variables del mismo proceso, tales como: temperatura, presión, nivel, humedad, velocidad y flujo, realizadas habitualmente por operadores humanos a un conjunto de elementos tecnológicos conocido como Controlador Lógico Programable,
el cual resulta esencial para desarrollar el funcionamiento óptimo de máquinas o procesos. Hoy en día la nueva tecnología digital ha revolucionado los campos del saber y el conocimiento. En el ámbito eléctrico para tener una energía de calidad se busca que los sistemas operen con eficacia, eficiencia, continuidad en el servicio, con mínimas variaciones armónicas y sobretensiones atenuadas lo más posible.
En este sentido, una de las técnicas aplicadas para diseñar y operar sistemas de control eléctrico, es el empleo del controlador lógico programable (PLC). Este permite el control de los sistemas automatizados a través de controles de estado sólido, que a su vez pueden ser programados según las necesidades a satisfacer dentro del proceso en el cual se pretende tener un control óptimo.
En este contexto resulta relevante hacer uso de nuevas herramientas tecnológicas para emplear los principales sistemas de control digital, que hoy en día se logran con el uso del PLC, digitalizar y registrar la información y sobre todo realizar la programación en tiempo real usando el controlador lógico programable. Por lo que para lograr el objetivo propuesto la presente tésis está estructurada como sigue:
En el capitulo 1 se describe lo relacionado a la lógica electrónica que conforman los sistemas digitales, las ventajas que esto ofrece y ejemplos relacionados. Así se tiene una amplia idea general de lo que compone al PLC.
En el capitulo 2 se presenta la lógica tradicional ó lógica basada en los relevadores electromecánicos, describiendo los circuitos lógicos correspondientes y su comparación con la lógica de estado sólido para así conocer las funciones básicas de protección que éstos brindan.
En el capitulo 3 se describe lo relacionado al Controlador Lógico Programable (PLC), desde sus inicios hasta sus aplicaciones mas actuales, destacando el principio de su funcionamiento, clasificación, evolución, funciones y programación correspondientes.
C
C
A
A
P
P
I
I
T
T
U
U
L
L
O
O
1
1
.
.
L
L
Ó
Ó
G
G
I
I
C
C
A
A
E
E
L
L
E
E
C
C
T
T
R
R
Ó
Ó
N
N
I
I
C
C
A
A
.
.
1. Lógica Electrónica.
La electrónica digital constituye el mundo de las calculadoras, los ordenadores, los circuitos integrados y de los números binarios 0 y 1. Dentro de la electrónica es una actividad sumamente interesante ya que las aplicaciones de los circuitos digitales se extienden con gran rapidez. Ello se debe a que un pequeño circuito integrado puede realizar el cometido de miles de transistores, diodos y resistencias. En efecto, en la vida diaria se les puede ver actuar cotidianamente.
Actualmente, toda persona que desarrolla ingeniería necesita tener una sólida base en electrónica digital. A continuación se verán los principios de la electrónica digital, se presentarán dos elementos digitales básicos (las compuertas lógicas y los biestables o “flip-flops”), así como las aplicaciones principales de la lógica digital.
1.1. Sistemas Digitales.
Un sistema digital es una combinación de dispositivos diseñado para manipular información lógica o cantidades físicas que estén representadas en forma digital; es decir, las cantidades solo pueden tener valores discretos. La mayoría de las veces estos dispositivos son electrónicos, pero también pueden ser mecánicos, magnéticos o neumáticos. Algunos de los sistemas digitales más familiares incluyen computadoras y calculadoras digitales, equipo de audio y video digital, y el sistema telefónico, que es el sistema digital más grande del mundo.
Un sistema analógico contiene dispositivos que manipulan cantidades físicas representadas de manera analógica, en un sistema analógico las cantidades pueden variar en un rango continuo de valores, por ejemplo; la amplitud de la señal de salida para un altavoz en un receptor de audio puede tener cualquier valor entre cero y su límite máximo. Otros sistemas analógicos comunes son los amplificadores de audio. El equipo de grabación y reproducción de cinta magnética y un simple interruptor reductor de luz.
1.1.1. Ventajas de las Técnicas Digitales.
Un número cada vez mayor de aplicaciones en electrónica así como en la mayoría de otras tecnologías usan tecnologías digitales para hacer operaciones que alguna vez se realizaron mediante el uso de métodos analógicos. Las razones principales para el cambio a la tecnología digital son:
1. Los sistemas digitales generalmente son más fáciles de diseñar: se debe a que los
circuitos que se usan son circuitos de conmutación, donde los valores exactos de la
2. El almacenamiento de información es fácil. Se logra mediante dispositivos y
circuitos especiales que se pueden pegar a la información digital y retenerla el tiempo que sea necesario, y las técnicas de almacenamiento en masa que pueden reunir millones de millones de bits de información en un espacio físico relativamente pequeño. En contraste, las capacidades analógicas son extremadamente limitadas.
3. Mayor exactitud y precisión. Los sistemas digitales pueden manejar el número de
dígitos de precisión necesario con solo agregar más circuito de conmutación. Por lo general, en los sistemas analógicos la precisión se limita a tres o cuatro dígitos, ya que los valores de las tensiones y las corrientes dependen en forma directa de los valores que tienen los componentes de los circuitos y son afectados por fluctuaciones aleatorias de la tensión (ruido).
4. La operación se puede programar: es muy fácil diseñar sistemas digitales cuya
operación se controla mediante un conjunto de instrucciones almacenadas llamado
programa. Los sistemas analógicos también se pueden programar: pero la variedad y
complejidad de las operaciones están severamente limitadas.
5. Los circuitos digitales son menos susceptibles al ruido. Las fluctuaciones
involuntarias en la tensión (ruido) no son tan críticas en los sistemas digitales, puesto que el valor exacto de una tensión no es importante, siempre y cuando el ruido no sea tan intenso como para impedirnos distinguir entre un ALTO y un BAJO.
6. Se puede fabricar más circuitería digital en los chips de los circuitos integrados. Es
cierto que la circuitería analógica también sea beneficiada del tremendo desarrollo de la tecnología de los circuitos integrados, pero su complejidad relativa y el uso de dispositivos que no pueden ser integrados económicamente ( capacitores de alto valor, resistencias de precisión, inductores, transformadores ) han impedido que los sistemas analógicos alcancen el mismo grado de integración que los digitales.
1.1.2. Acotaciones de las Técnicas Digitales.
En realidad solo existe una desventaja importante cuando se usan técnicas digitales. La mayoría de las cantidades físicas son de naturaleza analógica, y a menudo estas cantidades son las entradas y salidas que son monitoreadas, operan y son controladas mediante un sistema, algunos ejemplos son: la temperatura y la presión, la posición, la velocidad, el nivel del líquido, la rapidez del flujo, etcétera. Existe el hábito de expresar estas cantidades en forma digital, como cuando se dice que la temperatura es de 64° F
(ó 63.8° F, si se quiere ser más exactos); pero en realidad se hace una aproximación digital a una cantidad inherentemente analógica.
Para aprovechar las técnicas digitales cuando se tienen entradas y salidas analógicas se deben seguir tres pasos:
1. Convertir las entradas analógicas del mundo real a la forma digital. 2. Procesar (efectuar operaciones con) la información digital.
En la figura1.1.2-1 se encuentra un diagrama de bloques para un sistema de control de temperatura típico. Como se muestra, la temperatura de manera analógica se mide y el valor que resulta se convierte a una cantidad digital por medio de un convertidor analógico-digital (ADC). Posteriormente, la circuitería digital, que pueden incluir una computadora digital, procesa la cantidad digital. Su salida digital se convierte a una cantidad analógica mediante un convertidor digital-analógico (DAC). Esta salida analógica alimenta a un controlador que realiza cierto tipo de acción para ajustar la temperatura.
Figura 1.1.2-1. Diagrama a bloques de un sistema de control de la temperatura que requiere conversiones analógico-digital con objeto de permitir el uso de técnicas de
procesamiento digital.
Otro buen ejemplo en el que la conversión entre analógico y digital tiene lugar es la grabación de audio. Los discos compactos (CD) han tomado a la industria de grabación por sorpresa, porque proporcionan un medio mucho mejor para grabar y reproducir música. El proceso funciona de la siguiente manera: (a) los sonidos de los instrumentos y voces humanas producen una señal de voltaje analógica en un micrófono; (b) esta señal analógica se convierte en un formato digital usando un proceso de conversión analógico-digital; (c) la información digital se almacena en la superficie del CD; (d) durante la reproducción, el reproductor de CD toma la información digital de la superficie del CD y la convierte en una señal analógica, la cual luego se amplifica y alimenta a una bocina que puede captar el oído humano.
La necesidad de conversión entre formas analógicas y digitales de información se puede considerar como una desventaja debido a la complejidad y gastos adicionales. Otro factor con frecuencia importante es el tiempo extra que se requiere para realizar esta conversión. En muchas aplicaciones, estos factores los contrarrestan las numerosas ventajas que ofrece el uso de técnicas digitales, y por lo tanto, la conversión entre cantidades analógicas y digitales ha pasado a ser un hecho común en la tecnología actual.
Es común ver que se empleen en ambas tecnologías analógicas y digital dentro del mismo sistema con el fin de obtener provecho de cada una. En estos sistemas híbridos
una de las partes más importantes de la fase de diseño es la determinación de cuales partes del sistema deben ser analógicas y cuales digitales.
1.1.3. Ejemplo de Sistema Digital (PC).
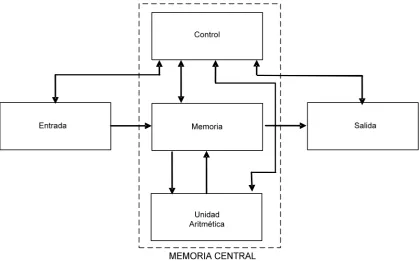
[image:13.595.87.508.268.529.2]Las PC´s son los sistemas digitales más complejos. La mayoría de estas pueden dividirse en los cinco bloques funcionales de la figura 1.1.3-1. El dispositivo de entrada puede ser un teclado, un lector de tarjetas, un aparato de cinta magnética o una línea telefónica. Todo este equipo permite pasar la información desde la persona a la máquina. El dispositivo de entrada debe codificar el lenguaje humano en lenguaje binario de la PC.
Figura 1.1.3-1. Composición de una PC digital.
El bloque de memoria es la zona de almacenamiento de la información y de los programas; este almacenamiento puede ser complementado por otro almacenamiento exterior a la unidad de proceso. Tradicionalmente, casi toda la memoria de la unidad central de proceso (CPU) se ha construido a base de núcleos magnéticos, pero
actualmente se utilizan memorias de semiconductores.
El bloque de control es el sistema nervioso de la PC. Él dirige a los demás bloques para que operen en el orden correcto y ordena a la entrada cuando y donde ubicar la información dentro de la memoria; dirige a la memoria para que envíe información al bloque aritmético y ordena a éste sumar; envía el resultado otra vez a la memoria, y lo envía por el dispositivo de salida cuando debe operar. Todo esto no es más que una muestra de lo que puede realizar un bloque de control.
El bloque de salida es el enlace entre la máquina y la persona y puede comunicarse con
el hombre a través de un impresor, también puede sacar información por medio de una pantalla. La información de salida puede introducirse además en soportes de información externos como los discos duros. El bloque de salida debe decodificar el
lenguaje humano al lenguaje de la computadora.
El bloque central completo de la figura 1.1.3-1 suele llamarse unidad central de proceso. Es frecuente que la unidad aritmética, la memoria y la mayor parte del bloque de control se alojen en un solo gabinete. Los dispositivos situados en el exterior de la unidad central de proceso suelen llamarse dispositivos periféricos.
El diagrama de bloques de la PC de la figura 1.1.3-1 podría muy bien ser el de una calculadora, ya que hasta aquí los sistemas básicos operan igual; pero hay una diferencia fundamental entre una calculadora y una PC y es que éste es de tamañomucho mayor y utiliza un programa almacenadoen su interior. En la figura 1.1.3-2 se puede ver que en una computadora se introducen dos clases de información. Una de ellas es el programa (las instrucciones) que le dice a la unidad de control el procedimiento a seguir para resolver el problema; este programa, está almacenado en la memoria central mientras se resuelve el problema. La información del programa se almacena en la memoria y la utiliza únicamente la unidad de control. La información de los datos, sin embargo, es dirigida a distintas posiciones del interior del ordenador y es procesada por la unidad aritmética, sin que en ningún momento necesite ir a la memoria. La memoria auxiliar es una memoria adicional que puede necesitarse para almacenar una enorme cantidad de datos en algunos problemas muy complicados y puede no estar en la unidad central de proceso. Por otra parte, los datos pueden estar almacenados en dispositivos periféricos.
Control
Salida Memoria
Central Entrada
Memoria
Auxiliar Unidad lógica aritmética Programa
Datos
Figura 1.1.3-2.Circulación de las instrucciones de programa y de los datos en una computadora.
1.2. Compuertas Lógicas.
Los aparatos electrónicos digitales funcionan de manera extraordinariamente lógica. La pieza fundamental con la cual se construyen todos los circuitos digitales es la compuerta lógica y estas funcionan con números binarios; de aquí la expresión compuertas lógicas binarias. Todos los que trabajan en electrónica digital emplean a diario compuertas lógicas binarias.
Las compuertas lógicas pueden construirse a base de simples interruptores, relés, tubos de vacío, transistores y diodos, o circuitos integrados (CI).
1.2.1. Tablas de Verdad.
Una tabla de verdad es un medio para describir como la salida lógica de un circuito depende de los niveles lógicos presentes en las entradas de un circuito. En la figura 1.2.1-1 se representa una tabla de verdad para un tipo de circuito lógico de dos entradas.
En la tabla se listan todas las combinaciones posibles de niveles lógicos presentes en las entradas A y B, junto con el nivel de salida correspondiente x. la primera anotación de
la tabla muestra que cuando Ay B están en el nivel 0, la salida x esta en el nivel 1, ó,
de manera equivalente, en el estado 1. En la segunda anotación se muestra que cuando la entrada B se cambia al estado 1, de manera que A= 0 y =1, la salida x se convierte
en 0. De manera similar, en la tabla se muestra que le sucede al estado de salida para cualquier conjunto de condiciones de entrada.
resultante para la salida x a la derecha. Por supuesto, los valores de x dependerán del
tipo de circuito lógico.
Hay 4 anotaciones para la tabla de verdad de dos entradas, 8 anotaciones para una tabla de verdad de tres entradas y 16 anotaciones para la tabla de verdad de cuatro entradas. El número de combinaciones de entradas será igual a 2N para una tabla de verdad de N entradas. Así mismo, puede verse que la lista de combinaciones posibles de entradas sigue la secuencia de conteo binaria, y por lo tanto es fácil escribir todas las combinaciones sin omitir ninguna.
A B x
0 0 1 1 0 1 0 1 1 0 1 0
Entradas
Salida
A
B
?
xFigura 1.2.1-1. Ejemplo de tabla de verdad para circuito de dos entradas.
Tabla 1.2.1-1.Tabla de verdad para circuito de tres entradas.
A B C x
Tabla 1.2.1-2.Tabla de verdad para circuito de cuatro entradas.
A B C D x
0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 0 0 1 1 0 0 1 0 0 0 1 0 0 0 1
1.2.2. Compuertas OR.
La operación OR es la primera de las tres operaciones booleanas básicas que se deben considerar. La tabla de verdad en la figura 1.2.1-1 muestra lo que sucede cuando dos entradas lógicas A y B, se combinan usando la operación OR para producir la salida x,
en la tabla se muestra que x es una lógica 1. El único caso donde x es un 0 es cuando
ambas entradas son 0.
La expresión booleana para la operación OR es:
x = A+ B
En esta expresión el signo + no representa la adición común, sino la operación OR. La operación OR es similar a la adición, excepto para el caso donde A +B son 1; la
operación OR produce 1 + 1 = 1, no 1 + 1 = 2. En el algebra booleana, 1 es el valor mayor, por lo tanto nunca se puede tener un resultado mayor que 1.
Tabla 1.2.2-1.Tabla de verdad que define la operación OORR..
A
A BB XX==AA++BB
Figura 1.2.1-1. Símbolo de circuito para una compuerta OR de dos entradas
Lo mismo es valido para la combinación de tres entradas usando la operación OR. Aquí se tiene x = A + B + .Si se considera el caso donde las tres entradas son 1, se
tendrá:
C
x = 1 + 1 + 1 = 1
La expresión x = A + B se lee como “x es igual a A o B”, lo que significa que x
será 1 cuando A o B, o ambas, sean 1. De la misma manera, la expresión x = A + B
+ se lee “C x es igual a A o B, o ”, lo que significa que C x será 1 cuandoA o B, o
o cualquier combinación de ellas sea 1.
C
En un circuito digital una compuerta OR es un circuito que tiene dos o más entradas y cuya salida es igual a la combinación OR de las entradas. Las entradas A y B son
niveles lógicos de voltaje y la salida x es un nivel lógico de voltaje, cuyo valor es el
resultado de la operación OR en A y B, es decir; x = A + B. En otras palabra, la
compuerta OR opera de tal forma que su salida es ALTA (nivel lógico 1) si cualquier entrada A o B, o ambas, están en un nivel lógico 1. La salida de la compuerta OR será
BAJA (lógica 0) solo si todas sus entradas están en el nivel lógico 0.
Esta misma idea se puede ampliar a más de dos entradas. En la figura 1.2.1-2 se muestra una compuerta OR de tres entradas y su tabla de verdad. El análisis de esta tabla de verdad muestra de nuevo que la salida será 1 para cada caso donde una o mas entradas sean 1. Este principio general es el mismo para compuertas OR con cualquier número de entradas.
Usando el lenguaje del algebra booleana, la entrada x se puede expresar como x = A
+ B + C, donde de nuevo se debe enfatizar que el signo + representa la operación OR
de sus diversas entradas.
A B C x = A + B + C
0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 1 1
1.2.3. Compuertas AND.
La operación ANDes la segunda operación básica booleana. La tabla de verdad 1.2.3-1 muestra qué sucede cuando dos entradas lógicas, A y B, se combinan usando la
operación AND para producir la salida x. Así se muestra que x es un 1 lógico sólo
cuando A y B están en el nivel lógico 1. Para cualquier caso en que una de las entradas
es 0, la salida es 0.
Figura 1.2.3-1. Símbolo de compuerta AND.
Tabla 1.2.3-1. Tabla de verdad para la operación AND.
A B x = A•B
0 0 1 1
0 1 0 1
0 0
0 1
La expresión booleana para la operación AND es:
B A x= •
En esta expresión el signo • representa la operación booleana AND y no la multiplicación. Sin embargo, la operación AND en variables booleanas opera igual que la multiplicación común, como lo muestra un análisis de la tabla de verdad, y por lo tanto se les puede considerar como si fueran iguales. Esta característica resulta útil cuando se evalúan expresiones lógicas que contienen operaciones AND.
La expresión x= A•B se lee “xes igual a A y B”, lo que significa que x será 1 sólo
cuando A y Bsean 1. El signo • normalmente se omite, de manera que la expresión
simplemente se transforma en x= AB. Para el caso en que hay tres entradas AND,
tenemos x= A•B•C = ABC. Esto se lee “xes igual a A y B y ”, lo que significa
que
C x será 1 sólo cuando A y B y C sean 1.
El símbolo lógico para una compuerta AND de dos entradas se muestra en la figura 1.2.3-1. La salida de la compuerta AND es igual al producto AND de las entradas lógicas; es decir,x= AB. En otras palabras, la compuerta AND es un circuito que opera
característica de las compuertas AND con más de dos entradas. Por ejemplo, en la figura 1.2.3-2 se muestran una compuerta AND de tres entradas y su respectiva tabla de verdad (tabla 1.2.3-2). Aquí la salida de la compuerta es 1 sólo para el caso donde
. La expresión para la salida es 1
= =
=B C
A x= ABC. En el caso de una compuerta
AND de cuatro entradas la salida es x= ABCD, y así sucesivamente.
Figura 1.2.3-2. Símbolo de compuerta AND de tres entradas.
Tabla 1.2.3-2. Tabla de verdad para la operación AND de tres entradas.
A B C x = ABC
0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 0 0 0 0 0 0 0 1
Nótese la diferencia entre los símbolos para la compuerta AND y la compuerta OR. Cuando el símbolo AND aparece en un diagrama de un circuito lógico indica que la salida pasa a ALTA sólo cuando todas las entradas son ALTAS. Cuando aparece el símbolo OR, significa que la salida pasará a ALTA cuando cualquier entrada sea ALTA.
1.2.4. Compuertas NOT.
La operación NOT difiere de las operaciones OR y AND en que se puede realizar en una sola variable de entrada. Por ejemplo, si la variable A se somete a la operación
NOT, el resultado x se puede expresar como:
A x=
Donde la barra sobrepuesta representa la operación NOT. Esta expresión se lee “x es
igual a la negación de A”, o “x es igual al inverso de A”, o “x es igual al complemento de A”. Cada una de éstas es de uso común y todas indican que el valor
lógico de x= A es opuesto al valor lógico de A. La tabla de verdad (tabla 1.2.4-1)
0
1= porque NOT 1 es 0
y
1
0= porque NOT 0 es 1
Tabla 1.2.4-1. Tabla de verdad para operación NOT.
A x = A
0
1 1 0
A la operación NOT también se le denomina inversión o complementación. Aunque siempre se usará el indicador de barra sobrepuesta para representar una inversión. En la figura 1.2.4-1 se muestra el símbolo de un circuito NOT, al cual se le llama más comúnmente INVERSOR. Este circuito siempre tiene una sola entrada y su nivel lógico de salida invariablemente es opuesto al nivel lógico de esta entrada.
Figura 1.2.4-1. Símbolo para el inversor (circuito NOT).
1.2.5. Compuertas NOR.
En la figura 1.2.5-1 se muestra el símbolo de una compuerta NOR. Es igual al símbolo de la compuerta OR, excepto que tiene un círculo pequeño en la salida el cual representa la operación de inversión. De esta manera, la compuerta NOR opera como una compuerta OR seguida por un INVERSOR, de manera que los circuitos en la figura 1.2.5-1 y 1.2.5-2 son equivalentes y la expresión de salida para la compuerta NOR es
x = A+B.
Figura 1.2.5-1. Símbolo NOR.
Figura 1.2.5-2. Circuito equivalente.
Tabla 1.2.5-1. Tabla de verdad.
A B A+B A+B
0 0 0 1 1 0 1 1
0 1
1 1
1 0
0 0
OR NOR
1.2.6. Compuertas NAND.
En la figura 1.2.6.-1 se muestra el símbolo de una compuerta NAND de dos entradas. Es el mismo que el símbolo de la compuerta AND, excepto por el circulo pequeño en su salida. De nuevo este círculo pequeño denota la operación de inversión. Así, la compuerta NAND opera como una AND seguida por un inversor. De manera que los circuitos de las figuras 1.2.6.-1 y 1.2.6.-2 son equivalentes, y la expresión de salida para la compuerta NAND es x = AB.
Figura 1.2.6-1. Símbolo NOR.
Figura 1.2.6-2. Circuito equivalente.
Tabla 1.2.6-1. Tabla de verdad.
A B AB A+B
0 0 0 1 1 0 1 1
1 0
0 0
1 1
1 0
AND NAND
1.2.7. Circuitos Lógicos.
Cualquier circuito lógico, sin importar qué tan complejo sea, puede ser completamente descrito mediante el uso de las tres operaciones básicas booleanas, ya que la compuerta OR, la compuerta AND y el circuito NOT son los bloques de construcción básicos de los sistemas digitales. Por ejemplo, al considerar el circuito de la figura 1.2.7-1, este circuito tiene tres entradas, A, B y C, y una sola salida, x. Utilizando la expresión
booleana para cada compuerta, se puede determinar fácilmente la expresión para la salida.
La expresión para la salida de la compuerta AND se escribe A•B. Esta salida AND
está conectada como una entrada a la compuerta OR junto con C, otra entrada. La
compuerta OR opera sobre sus entradas de manera que su salida es la suma OR de las entradas. Así, se puede expresar la salida OR como x= A•B+C. (Esta expresión final
también se podría escribir como x=C+ A•B, puesto que no importa cuál término de
la suma OR se escriba primero.)
En ocasiones puede haber confusión respecto a cuál operación se realiza primero en una expresión. La expresión A•B+C se puede interpretar de dos formas: (1) A•B opera
con , o bien (2) C A opera con AND con el término B+C. Para evitar esta confusión,
se considera que si una expresión contiene ambas operaciones AND y OR, las operaciones AND se realizan primero, a menos que existan paréntesisen la expresión, en cuyo caso la expresión dentro del paréntesis se llevará a cabo primero. Esta es la misma regla que se usa en el álgebra común para determinar el orden de las operaciones.
Para ilustrar esto más ampliamente se considera el circuito de la figura 1.2.7-2. La expresión para la salida de la compuerta OR es simplemente A+B. Esta salida sirve
como una entrada para la compuerta AND junto con otra entrada, C. De esta manera, la
salida de la compuerta AND se expresa como x=
(
A+B)
•C, se observa el uso deparéntesis aquí para indicar que A y B operan primero con OR, antes que su suma OR
realice la operación AND con C. Sin el paréntesis se interpretaría incorrectamente,
puesto que A+B•C significa que A se opera con OR con el producto B•C.
Figura 1.2.7-2. Circuito lógico cuya expresión requiere paréntesis.
Existen también circuitos que contienen INVERSORES. Siempre que un INVERSOR esté presente en un diagrama de un circuito lógico, su expresión de salida será simplemente igual a la expresión de entrada con una barra sobre ella. En la figura 1.2.7-3 la entrada A se alimenta a través de un INVERSOR, cuya salida, por lo tanto, es A.
La salida del INVERSOR se alimenta a una compuerta OR junto con B, de manera que
la salida OR es igual a A+B. Observe que la barra sólo está sobre A, lo que indica que A se invierte primero y luego se hace la operación de OR con B.
En la figura 1.2.7-4 la salida de la compuerta OR es igual a A+B y se alimenta a través
de un INVERSOR. Por lo tanto, la salida del INVERSOR es igual a
(
A+B)
, puesto queinvierte la expresión de entrada completa. Nótese que la barra cubre toda la expresión . Esto es importante porque las expresiones
(
A+B)
(
A+B)
y(
A+B)
no sonequivalentes. La expresión
(
A+B)
significa que A opera con OR con B y luego seinvierte su suma OR, en tanto que la expresión
(
A+B)
indica que A se invierte y B seinvierte, y luego ambos resultados se operan con OR.
Figura 1.2.7-4. Circuito que utiliza INVERSOR.
A continuación se muestran dos ejemplos más, En la figura 1.2.7-5 se observa especialmente el uso de dos conjuntos diferentes de paréntesis. Así mismo, en la figura 1.2.7-6 la variable de entrada A está conectada como una entrada a dos compuertas
diferentes.
Figura 1.2.7-5. Ejemplo con INVERSOR.
Figura 1.2.7-6. Ejemplo con INVERSORES.
1.2.8. Respuestas de Circuitos Lógicos.
Una vez que se obtiene la expresión booleana para una salida de circuito se puede obtener el nivel lógico de la salida para cualquier conjunto de niveles de entrada. Por ejemplo, si se desea conocer el nivel lógico de la salida x para el circuito de la figura
valor de x se puede determinar sustituyendo los valores de las variables en la expresión
y realizando las siguientes operaciones:
x= ABC
(
A+D)
[image:26.595.194.398.369.572.2]( )
( )
( )
0 1 1 1 1 1 0 1 1 1 1 0 1 1 0 = ⋅ ⋅ ⋅ = + ⋅ ⋅ ⋅ = + ⋅ ⋅ ⋅ =Figura 1.2.8-1. Ejemplo con INVERSORES.
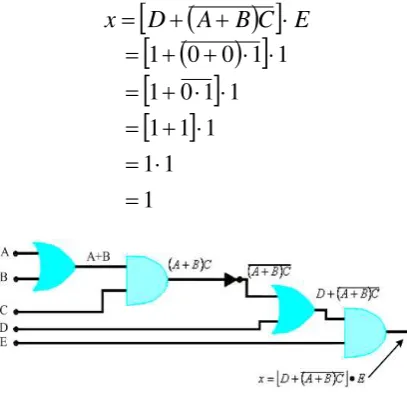
A manera de ejemplo, se evaluará la salida del circuito de la figura 1.2.8-2 para A=0, =
B 0, C =1, D=1 y E=1.
(
)
[
D A BC]
E x= + + ⋅(
)
[
]
[
]
[ ]
1 1 1 1 1 1 1 1 0 1 1 1 0 0 1 = ⋅ = ⋅ + = ⋅ ⋅ + = ⋅ ⋅ + + =Figura 1.2.8-2. Ejemplo con INVERSOR.
En general, cuando se evalúe una expresión booleana habrá que tomar en cuenta las siguientes reglas:
1. Realizar todas las inversiones de términos simples; es decir, 0=1 o 1=0. 2. Resolver todas las operaciones dentro de paréntesis.
3. Llevar a cabo una operación AND antes de una operación OR, a menos que el paréntesis indique lo contrario.
El nivel lógico de salida para niveles de entrada específicos también se puede determinar directamente a partir del diagrama del circuito sin usar la expresión booleana. Para ilustrar esto, el circuito de la figura 1.2.8-3 se presenta con los niveles de entrada A=0, B=1, C =1, D=1. El procedimiento es iniciar desde las entradas y
luego a través de cada INVERSOR y compuerta, escribiendo cada una de sus salidas en el proceso hasta que se llegue a la salida final. Así la compuerta AND 1 tiene las tres
entradas en el nivel 1 porque el INVERSOR cambia la expresión A=0 a 1. Esta
condición produce un 1 en la salida de la compuerta AND, puesto que . La compuerta OR tiene entradas de 1 y 0, lo cual produce una salida de 1 porque 1⋅1⋅11=+10=1. Este 1 se invierte a 0 y se aplica a la compuerta AND 2 junto con el 1 de la primera salida AND. Las entradas 0 y 1 de la compuerta AND 2 producen una salida x de 0
[image:27.595.203.400.272.323.2]debido a que 0⋅1=0.
Figura 1.2.8-3. Determinación del nivel de salida a partir del diagrama del circuito.
1.2.9. Traspolación de Expresiones Booleanas a Circuitos.
Cuando la operación de un circuito se define mediante una expresión booleana se puede dibujar un diagrama de un circuito lógico de manera directa a partir de esa expresión. Por ejemplo, si se necesitara un circuito que fuese definido mediante , de inmediato se sabría que se requiere una compuerta AND de tres entradas. Si se requiere de un circuito que esté definido por
C B A x= ⋅ ⋅
B A
x= + , se usaría una compuerta OR de dos
entradas con un INVERSOR en una de las entradas. El mismo razonamiento que se emplea en estos casos simples se puede aplicar a circuitos más complejos.
Si se desea construir un circuito cuya salida sea y=AC+BC+ABC. Esta expresión
booleana contiene tres términos (AC,BCyABC). La figura 1.2.9-1(a) ilustra este caso,
que representa una compuerta OR de tres entradas etiquetadas como AC,BCyABC.
Cada compuerta OR es un término del producto AND, lo cual significa que se puede usar una compuerta AND con entradas apropiadas para generar uno de éstos términos. Lo anterior se ejemplifica en la figura 1.2.9-1(b), en la que se muestra el diagrama final del circuito. Nótese el uso de INVERSORES para producir los términos AyC que se
BC A C B AC y= + + A
B
C
C
B
C
A B
C
AC
C B
BC A
(a)
[image:28.595.90.506.103.315.2](b)
Figura 1.2.9-1. Construcción de un circuito lógico a partir de una expresión booleana.
1.2.10. Teoremas.
1.2.10.1. Teoremas booleanos
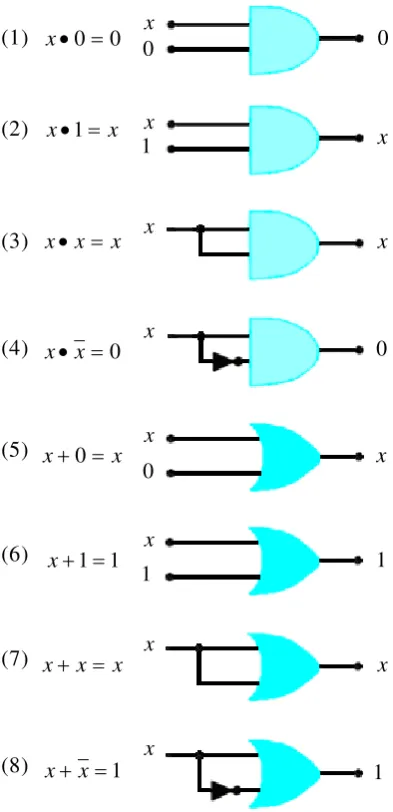
Hasta la sección anterior se ha visto cómo álgebra booleana se puede emplear para ayudar a analizar un circuito lógico y expresar su operación en forma matemática. Para continuar con el análisis del algebra booleana se describen los diversos teoremas booleanos que permiten simplificar las expresiones y los circuitos lógicos. El primer grupo de teoremas se muestra en la figura 1.2.10.-1. En cada teorema x es una variable
lógica que puede ser un 0 o un 1. Cada teorema se presenta con un diagrama del circuito lógico que demuestra su validez.
(1) (2) (3) (4) (5) (6) (7) (8) 0 0= •
x 0x 0
x
1
x
x•1= x
x
x x
x x• =
x 0 0 = •x x x 0 x x x+0=
x 1 1 1 1= + x x x x x x+ =
[image:29.595.210.407.116.523.2]x 1 1 = +x x
Figura 1.2.10-1. Teoremas booleanos.
El teorema (3) puede ser demostrado ensayando cada caso. Si x = 0, entonces
si entonces 1 ;
0 0
0• = x=1, •1=1 por lo tanto x•x=x. El teorema (4) se puede
demostrar en la misma forma. Sin embargo, también se puede razonar que en cualquier momento x o su inverso x tiene que estar en el nivel 0 y por ende su producto AND
siempre debe ser 0.
El teorema (5) es directo, ya que 0 sumado a cualquier número no afecta su valor, ya sea en la suma regular o en una suma OR. El teorema (6) estipula que si cualquier variable se opera con OR con 1, el resultado siempre será 1. Si se verifica esto para ambos valores de x . 0 + 1 = y 1+1=1. De manera equivalente se puede recordar que
El teorema (7) se puede demostrar verificando ambos valores de x:0+0=0 y 1+1=1. El teorema (8) se puede demostrar de forma similar, o simplemente se puede razonar que en cualquier momento x o x debe ser en el nivel 1, de manera que siempre se
opere con OR un 0 y 1, lo cual da como resultado 1.
Antes de introducir más teoremas cabe aclarar que cuando se aplican los teoremas (1) al (8) la variable x en realidad puede representar una expresión que contenga más de una
variable. Por ejemplo. Si se tiene AB (AB), se puede invocar el teorema (4) haciendo
.
B A
x= Así, se puede decir que AB (AB)= 0. La misma idea se puede aplicar al uso
de cualquiera de estos teoremas.
1.2.10.2. Teoremas con Variables Múltiples.
Los teoremas que se presentan a continuación implican más de una variable:
(9) x+ y= y+x
(10) x•y= y•x
(11) x+(y+z)=(x+y)+z =x+y+z
(12) x(yz)=(xy)z=xyz
(13a) x(y+z)=xy+xz
(13b) (w+x)(y+z)=wy+xy+wz+xz
(14) x+xy=x
(15a) x+xy =x+y
(15b) x+xy=x+ y
El teorema (9) y (10) se llaman leyes conmutativas. Estas leyes indican que no importa
el orden en que se operen dos variables con OR o con AND, el resultado es el mismo. Los teoremas (11) y (12) son las leyes asociativas. Las cuales afirman que se pueden
agrupar las variables en una expresión AND o en una OR en cualquier forma que se desee.
El teorema (13) es la ley distributiva, la cual estipula que una expresión se puede
desarrollar multiplicando termino por termino, como en la algebra común. Asimismo, este teorema indica que se puede factorizar una expresión; es decir, si se tiene una suma de dos (o más) términos, cada uno de los cuales contengan una variable común, esta se puede factorizar, como en la algebra común. Por ejemplo si se tiene la expresión
,
C B A C B
A + se puede factorizar la variable :B
) (AC AC B
C B A C B
A + = +
Como un segundo ejemplo, considérese la expresión ABC+ ABD. Aquí los dos términos tienen en común las variables A y B, de manera que A•B se puede
) (C D AB ABD
ABC + = +
Los teoremas (9) al (13) son fáciles de recordar y usar puesto que son idénticos a los del algebra común. Por otra parte, los teoremas (14) y (15) no tienen contrapartes en el algebra común. Cada uno puede ser probado ensayando todos los casos posibles de x y
, una ilustración del teorema (14) seria:
y
Caso 1. Par x=0,y=0
0 0 0 0 0 0 = = • + =
+xy x
x
Caso 2. Par x=0,y =1
0 0 0 0 0 0 1 0 0 = = + = • + =
+xy x
x
Caso 3. Par x=1,y=0
1 1 1 0 1 1 0 1 1 = = + = • + =
+xy x
x
Caso 4. Par x=1,y=1
1 1 1 1 1 1 1 1 1 = = + = • + =
+xy x
x
El teorema (14) también se puede demostrar factorizando y usando los teoremas (6) y (2) como se describe a continuación:
) 1
( y
x xy
x+ = +
= x•1 [Usando el teorema (6)] =x [Usando el teorema (2)]
1.2.10.3. Teoremas De Demorgan.
Dos de los teoremas mas importantes del algebra booleana son contribución del matemático Demorgan. Los teoremas de Demorgan son de mucha utilidad para simplificar expresiones en las que intervienen un producto o una suma de variables. Los teoremas son:
(16) (x+y)= x•y
(17) (x•y)=x+y
El teorema (16) afirma que cuando se invierte la suma OR de dos variables equivale a invertir cada variable individualmente y luego operar con AND estas variables invertidas. El teoremas (17) establece que cuando se invierte el producto AND de dos variables es lo mismo que invertir cada variable individualmente y luego operarlas con OR. Cada uno de los teoremas de Demorgan se puede demostrar fácilmente verificando todas las combinaciones posibles de x y . y
Aunque estos teoremas se han enunciado en términos de las variables individuales x
yy, son igualmente validos para situaciones donde x o y son expresiones (AB+C) ,
como se muestra en seguida:
C B A C B
A + )=( )•
(
Se observa que se empleó el teorema (16) y se trató AB como x y C como . El
resultado se puede simplificar aun más puesto que se tiene un producto
y
B
A que está
invertido. Usando el teorema (17) la expresión se transforma en:
C B A C B
A • = + •
Nótese que se puede remplazar Bpor B de manera que finalmente se tendrá:
C B C C B
A+ )• =A +
(
Este resultado final únicamente contiene signos inversores que invierten una sola variable.
1.2.10.4. Implicaciones de los Teoremas de Demorgan.
y x y x+ = •
El lado izquierdo de la ecuación se puede tomar como la salida de una compuerta NOR cuyas entradas son x y . Por otra parte, el lado derecho de la ecuación es el resultado
de primero invertir
y
x y luego pasarla a través de una compuerta AND. Estas dos
presentaciones son equivalentes y se ilustran en la figura 1.2.10.4-1(a).
y
x
y x+y
≡
x yx
y
y x y x• = +
x
y x•y=x+y
Figura 1.2.10.4-1(a). Circuitos equivalentes implicados por el teorema (16); (b) símbolo alterno para la función NOR.
x
y xy
≡
x y
x
y
xy y x+ =
x
y x+y=xy
Figura 1.2.10.4-2(a). Circuitos equivalentes implicados por el teorema (17); (b) símbolo alterno para la función NAND.
Lo anterior significa que una compuerta AND con INVERSORES en cada una de sus entradas es equivalente a una compuerta NOR. De hecho, ambas representaciones se usan para describir la función NOR. Cuando la compuerta AND con entradas invertidas se usa para representar la función NOR, normalmente se dibuja como se muestra en la figura 1.2.10.4-1(b), donde los circuitos pequeños en las entradas representan la operación de inversión.
y x y x• = +
El lado izquierdo de la ecuación se puede implementar mediante una compuerta NAND con entradas x y y, el lado derecho se puede llevar a cabo invirtiendo primero las
entradas x y y luego pasándolas a través de una compuerta OR. Estas dos
representaciones equivalentes se muestran en la figura 1.2.10.4-2(a). La compuerta OR con INVERSORES en cada entrada es equivalente a la compuerta NAND. Cuando se usa la compuerta OR con entradas invertidas para referir la función NAND, normalmente se dibuja como se muestra en la figura 1.2.10.4-2(b) donde nuevamente los círculos denotan inversión.
,
y
1.3. Flip Flop.
El segundo elemento más comúnmente usado en la mayoría de sistemas digitales es el Flip Flop, dispositivo binario que recuerda el estado de sus entradas aún cuando hayan desaparecido ya estas. Así por ejemplo, puede construirse una alarma de incendios que acciones la bocina y la mantenga sonando aún si desaparece la condición (el fuego) que motivó su disparo. La alarma tiene también dos estados: ACCIONADA Y APAGADA. Una compuerta lógica en este caso no seria útil por carecer de memoria: una vez que desaparece la condición de entrada, la salida dejaría su estado activo.
En la figura 1.3-1(a) puede verse el símbolo lógico de un tipo de Flip Flop conocido como R-S. Las entradas se designan en este caso como las letras R ( reset) y S (set) y la salida con la letra Q. las propiedades de este Flip Flop R-S están resumidas en la tabla de verdad de la figura 1.3-1(b) cuando ambas condiciones (estados) de entrada están BAJAS la salida esta ALTA. El elemento se encuentra entonces en lo que se conoce como estado indeterminado, ya que la salida puede quedar ALTA o BAJA si ambas entradas pasan simultáneamente a ALTO; por lo tanto este estado suele generalmente evitarse. Cuando la entrada R esta BAJA y la S ALTA la salida pasa a nivel ALTO. En general, cuando la salida de un elemento está a nivel ALTO y no se trata de un estado indeterminado se dice que el elemento esta puesto a uno (set). Así pues si Q esta BAJA
y S ALTA el Flip Flop esta puesto a uno. Si la entrada R esta ALTA y la S BAJA la salida adopta nivel BAJO. En general, cuando un dispositivo presente salida BAJA se dice que esta puesto a cero (reset). Finalmente, cuando ambas entradas R y S están
ALTAS la salida permanece sin cambios, esto es, si está BAJA seguirá ALTA.
[image:34.595.226.386.582.731.2](a) Símbolo lógico.
Tabla de verdad del slip flor RS.
Entradas SALIDA
R S Q nombre L L
L H H L H H
H H
L No Cambia
Indeterminado Puesta uno Reposición Recuerda estado
anterior
(b)
Figura 1.3-1 Flip Flop RS: tabla de verdad.
Ejemplo: el motor de arranque de un automóvil tiene un interruptor térmico de sobrecarga que se abre cuando la temperatura del motor excede un límite prudente. Se requiere diseñar un circuito de control que prenda una luz roja de aviso en el tablero de mandos del conductor y la mantenga prendida aún cuando la temperatura del motor de arranque descienda por debajo del límite. (La luz roja podrá apagarse únicamente actuando sobre un interruptor de reposición).
Figura 1.3-2. (a) circuito del arrancador; (b) diagrama lógico para el sistema de alarma.
En la figura 1.3-2. (a) se representa el circuito del motor de arranque con su interruptor
de encendido S1 y el interruptor térmico de sobrecarga T1 en el circuito de la alarma se puede usar un Flip Flop para memorizar la apertura de T1 que tal vez indica un problema serio, aún cuando el motor se enfrié posteriormente y se cierre de nuevo T1. En la figura 1.3-2. (b) se tiene el diagrama lógico del sistema de alarma. Cuando la
S estará a nivel BAJO. En la figura 1.3-1(b) se observa que si R=H y S=L el Flip Flop se pone a cero, esto es Q adopta el nivel BAJO por lo tanto inicialmente la luz piloto esta apagada. Posteriormente, estando R en el nivel ALTO, si se produce una sobre carga térmica T1 se abrirá pasando R a nivel BAJO y poniéndose a uno el Flip Flor (S=H, R= L). La salida Q pasara a nivel ALTO, prendiéndose la luz piloto. Cuando se enfrié el motor y se cierre T1 R volverá al nivel ALTO, pero las entradas son ahora S = H y R =H, por lo que no se produce cambio de la salida y Q permanece ALTA. De este modo el FLIP FLOP memoriza la sobrecarga térmica. La luz piloto puede apagarse pulsando momentáneamente el interruptor de reposición.
C
C
A
A
P
P
I
I
T
T
U
U
L
L
O
O
2
2
.
.
C
C
O
O
N
N
T
T
R
R
O
O
L
L
E
E
S
S
E
E
L
L
E
E
C
C
T
T
R
R
O
O
M
M
A
A
G
G
N
N
É
É
T
T
I
I
C
C
O
O
S
S
.
.
2. Controles Electromagnéticos.
En los sistemas industriales, uno de los elementos fundamentales que intervienen en distintas fases, ya sea para instalaciones de bombeo, en transportadores, en elevadores, en máquinas-herramientas, etc, es el motor eléctrico en sus distintos tipos y características de aplicación. Existen ciertas condiciones que se deben considerar cuando se seleccionan, diseñan, instalan o mantiene equipo de control de dichos motores. El control de motores fue un problema muy simple cuando los motores eran usados para accionar el eje de una línea común a varios motores y sólo se requería arrancar y parar el motor unas pocas veces al día; sin embargo, con accionamientos individuales los motores son ahora una parte integral de las maquinarias y, entonces, es necesario diseñar el controlador del motor para satisfacer las necesidades de la máquina a la cual se conecta.
El control de motores es un término muy amplio y va desde considerar un simple desconectador de palanca para conectar a un motor, hasta un sistema mas complejo con componentes como relevadores, temporizadores e interruptores, o bien, con la aplicación de controladores lógicos programables y terminales remotas. Como resultado de las aplicaciones, cuando el equipo de control de un motor se selecciona e instala, se deben considerar muchos factores para estar seguro que el control funcionará en forma apropiada para el motor y para las aplicaciones que tenga.
2.1. Circuitos Lógicos Utilizando Relevadores Magnéticos.
Durante muchos años, las funciones lógicas industriales fueron realizadas prácticamente de forma exclusiva con relevadores operados de forma mecánica, y la lógica de relevadores todavía disfruta de una amplia popularidad en la actualidad. En esta arquitectura, se activa la bobina de un relevador cuando el circuito que controla a la bobina se cierra al activar (cerrar), ciertos interruptores o contactos. La figura 2.1-1 muestra que un relevador A (RA) se activa si se cierra el interruptor de límite 1 (LS1) y
el interruptor de presión 4 (PS4).
El diseño de la figura 2.1-1 hace que el relevador A se active si se presenta una cierta
combinación de eventos en el sistema. La combinación necesaria es el cierre de LS1 por medio del aparato que opere a LS1, y, al mismo tiempo, el cierre de PS4 por cualquier líquido o gas que afecte a PS4. Si ambos sucesos ocurren al mismo tiempo, el relevador
A se activará. Los términos levantar o energizar con frecuencia se utilizan para
significar la activación. Si alguno o ambos interruptores están abiertos, RA se
Figura 2.1-1. Circuito lógico con relevador en el que la bobina de relevador es controlada por dispositivos de entrada: un interruptor de límite y uno de presión.
Si RA se encuentra desactivado, los contactos controlados por RA regresan a su estado
normal, es decir, los contactos normalmente cerrados (N.C.) se cierran y los contactos normalmente abiertos (N.A.) se abren. Por otro lado, si RA está activado, todos los
contactos asociados con RA cambian de estado. Los contactos N.C. se abren y los
contactos N.A. se cierran. La figura 2.1-1 solo muestra uno de cada tipo de contacto. Los relevadores industriales reales generalmente tienen varios contactos de cada tipo (varios contactos N.C. y varios contactos N.A.). El circuito que se muestra las dos ideas principales de los circuitos de lógica de relevador y para tal caso, de todos los circuitos lógicos.
1. Un resultado positivo (en este caso, la activación del relevador) está condicionado por otros eventos individuales. Las condiciones exactas necesarias dependen de la forma como están conectados los contactos del interruptor de alimentación. En la figura 2.1-1 tanto LS1 como PS4 deben estar cerrados porque los contactos están conectados en serie. Si los contactos estuvieran conectados en paralelo, cualquier interruptor que se encontrara cerrado activaría un relevador.
2. Una vez que se presenta un resultado positivo, el resultado puede transferirse a otras partes del circuito. De esta forma, puede transferir sus efectos a distintas partes a lo largo del circuito de control. La figura 2.1-1 muestra a RA que tiene un contacto
N.A. y un contacto N.C. con cada contacto afectando alguna otra parte en el circuito general. Por consiguiente, la acción de RA se transferirá a ambas partes del circuito.
En la figura 2.1-2, el interruptor de límite se activa de forma mecánica cuando el cilindro hidráulico 3 se encuentra completamente extendido. El cilindro hidráulico 3 se ubica en algún lugar dentro de la parte mecánica del sistema industrial y tiene algún tipo de leva conectada a él para activar LS3. Cuando los contactos N.A. de LS3 se cierran, RB se activa.
Para apreciar la capacidad de toma de decisiones de tales circuitos, se analizará a RG.
Considerando que la bobina (RG) tiene el control sobre una válvula que puede dejar
pasar o bloquear algún tipo de flujo, este fluirá si se cumplen las siguientes condiciones:
1. RB está activado.
2. RD está activado.
[image:39.595.150.447.284.535.2]3. RE está activado.
Figura 2.1-2. Circuito de lógica de relevador en el que las bobinas del relevador son controladas por los contactos de otros relevadores.
Se observa que RB está controlado por el cilindro hidráulico 3 mediante LS3. Los
relevadores RD y RE, aunque no descritos en la figura 2.1-2, representan condiciones en
el sistema, intervenciones humanas, o una combinación de ambas. Para concretar, RD se
activará si está disponible una presión de fluido adecuada y que RE se activará si se
detecta un cierto tipo de contaminación en dicho fluido. Lo que sucede es que RG
tomará una decisión sobre si permite o no el flujo. Tomará esta decisión al considerar tres condiciones:
1. RB (N.A.): El cilindro hidráulico debe estar extendido.
2. RD (N.A.): Debe existir una presión adecuada en el sistema.
2.2. La lógica de Estado Sólido en Comparación con la Lógica de Relevadores.
Los relevadores magnéticos han soportado la mayoría de los requerimientos lógicos de la industria del siglo XX por muchos años, y continuarán utilizándose ampliamente. Debido a los materiales mejorados de construcción y a mejores diseños, ahora los relevadores son capaces de manejar, bajo condiciones normales, algunos millones de operaciones sin errores. Sin embargo, bajo ciertas condiciones y dentro de ciertas configuraciones, la lógica de estado sólido es demostrablemente superior a la lógica de relevadores. Se describirán las condiciones bajo las cuales la lógica de estado sólido es preferida y se tratará de señalar algunas de las consideraciones más importantes utilizadas para decidir entre los dos tipos de lógica, para ello deberá considerarse los siguientes aspectos:
Confiabilidad.
En la mayor parte de los casos industriales la principal consideración al seleccionar los circuitos lógicos es contar con una operación confiable y libre de mantenimiento. Los relevadores poseen uniones y contactos con movimiento mecánico, los cuales son sujetos al desgaste. Además, sus bobinas deben permitir grandes corrientes internas para generar la fuerza necesaria para desplazar los contactos. Éstos son los motivos por los cuales la esperanza de vida de los relevadores es limitada a unos cuantos millones de operaciones, como ya se ha mencionado. Esto podría parecer una importante vida útil, y verdaderamente lo es, sin embargo habrá que considerar cuánto tiempo durará un relevador si realiza dos ciclos por minuto.
Las compuertas de estado sólido, por otro lado, tienen una esperanza de vida ilimitada. No poseen partes móviles ni corrientes internas importantes. Exceptuando choques térmicos o sobrecorrientes inesperadas, un dispositivo de estado sólido durará indefinidamente. Esta es una ventaja obvia de la lógica de estado sólido sobre la lógica de relevadores.
Los componentes relevadores están expuestos a la atmósfera. Por esto, las partículas de polvo pueden llegar a los aparatos mecánicos e interferir con el movimiento adecuado. Los químicos y el polvo en la atmósfera pueden atacar las superficies de los contactos, ocasionando que se llenen de picaduras. Cuando las superficies de contacto no están lisas pueden fundirse. También el aislamiento de las bobinas puede verse dañado por la acción química.
En contraste, las compuertas de estado sólido pueden encontrarse (y, por lo general, así es) selladas en contenedores que son impermeables a la atmósfera. Los químicos y las partículas suspendidas no pueden interferir con su adecuado funcionamiento.
Ambientes Explosivos.