INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
DISEÑO Y ANÁLISIS DE ESTABILIDAD DE UN
CONTROLADOR DIFUSO PARA UN PÉNDULO
INVERTIDO
T E S I S
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
P R E S E N T A
ISRAEL ABRAHAM ALARCÓN SÁNCHEZ
ASESOR:
Dr. CARLOS ROMÁN MARIACA GASPAR
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITlJLO DE INGENIERO EN COMUNICACIONES Y ELECTRÓNICA POR LA OPCIÓN DE TITULACIÓN TESIS Y EXAMEN ORAL INDIVIDUAL
DEBERA(N) DESARROLLAR
c.
ISRAEL ABRAHAM ALARCÓN SÁNCHEZ"DISEÑO Y ANÁLISIS DE ESTABILIDAD DE UN CONTROLADOR DIFUSO PARA UN PÉNDULO INVERTIDO"
DISEÑAR E IMPLEMENTAR UN ALGORITMO DE CONTROL UTILIZANDO LÓGICA DIFUSA PARA LA ESTABILIZACIÓN DE UN PÉNDUW INVERTIDO ROTANTE DE UN GRADO DE LIBERTAD .
•:. INTRODUCCiÓN • •:. MARCO TEÓRICO . •:. DESARROLLO .
•:. PRUEBAS y RESULTADOS . •:. CONCLUSIONES
ASESOR
DR. CARLOS ROMÁN MARIACA gasparIGiセ ;¡:-\í,-;.;.:: セ[G[ BZGゥセ@ ('e'
B エNZ セ@ エゥ Gゥ@ セ@
v セ@ t.. .
j
セ@;
l
. .... " UiAi--lllU2- セN@ . :'f. •. セL
I
ING. PATRICIA LORENA
セセez
RAN'b.i
JEFE DEL DEPARTAMENTO ACADÉMICOIW:·A.I'I1UTÍndice General
CAPÍTULO 1.- Introducció
1.1.- Objetivos ... 1.2.- Justificación del proyecto 1.3.- Planteamiento del proble
CAPÍTULO 2.- Marco teóri
2.1.- Lógica difusa ... 2.2.- Control difuso ... 2.3.- Funciones de membrecía 2.4.- Conjuntos difusos ... 2.5.- Tipos de sistemas difusos 2.6.- Modulo de fusificación .... 2.7.- Base de conocimientos .... 2.8.- Motor de inferencia ... 2.9.- Módulo de defusificación 2.10.- Base de Reglas... 2.11.- Modelo Mamdani ... 2.12.- Modelo Takagi-Sugeno 2.13.- Análisis de estabilidad d
2.13.1.- Consideraciones ace 2.13.2.- Estado del arte de es
2.14.- Control PID ... 2.15.- Sistemas de control a la 2.16.- Sistemas de control a la 2.17.- Sistemas de control en la 2.18.- Matlab ... 2.19.- Simulink ... 2.20.- Puente H ... 2.21.- Giroscopio ... 2.22.- Tarjeta de Adquisición d 2.23.- Optoacoplador ... 2.24.- Operación y circuito NOT 2.25.- Potenciómetro ... 2.26.- Motor de Corriente Dire 2.26.1.- Obtención del voltaje 2.26.2.- Par inducido en la es 2.26.3.- Conmutación en una 2.26.4.- Desplazamiento de l 2.26.5.- Ecuaciones de voltaj 2.27.- Modelo matemático del 2.27.1.- Análisis no lineal ...
ión...
... cto ... oblema ...
órico ...
... ... cía ... ... sos ... ... ... ... ción ... ... ... no-Kang (TSK) ... d de sistemas difusos ... acerca de la estabilidad de sistemas difusos ...
e estabilidad de sistemas difusos ...
... a lazo abierto ... a lazo cerrado ... en lazo cerrado en comparación con los sistemas en la ... ... ... ...
n de Datos (DAC) ... ... NOT también llamado Inversor ... ... Directa ... ltaje DC de salida de la espira rotatoria ... la espira rotatoria... una espira DC sencilla de cuatro espiras ... de las escobillas ... ltaje interno generado y par inducido en máquinas DC del péndulo invertido ... ... ... 5 ... 7 ... 8 ... 9 ... 11 ... 11 ... 11 ... 12 ... 16 ... 16 ... 20 ... 21 ... 22 ... 23 ... 25 ... 26 ... 28 ... 28 ... 29 ... 30 ... 56 ... 59 ... 59
n lazo abierto . 60 ... 61 ... 61 ... 61 ... 62 ... 63 ... 63 ... 63 ... 64 ... 65 ... 65 ... 66 ... 67 ... 68
DC... 69
... 70
2.27.2.- Análisis lineal ...
CAPÍTULO 3.- Desarrollo ...
3.1.- Primera etapa: Diseño de 3.1.1.- Diagrama de flujo ... 3.2.- Segunda etapa: Simulacio 3.2.1.- Control PID ... 3.2.2.- Control difuso ...
3.2.3.- Análisis de estabilidad 3.3.- Tercera etapa: Implement
CAPÍTULO 4.- Pruebas y r
4.1.-Modificaciones ... 4.2.- Trabajo a futuro ...
CONCLUSIONES ...
BIBLIOGRAFÍA...
GLOSARIO...
ANEXOS ...
ANEXO 1.- Giroscopio LPY530A ANEXO 2.- Puente H L293D ... ANEXO 3.- Optoacoplador MOC ANEXO 4.- Compuerta NOT 74L ANEXO 5.- Regulador de voltaj ANEXO 6.- DACPH1018 ... ANEXO7.- Potenciómetro de pr
...
...
del controlador difuso ... ... laciones ... ... ... idad ... entación ...
y resultados ...
... ... ... ... ... ... 30AL ... ... MOC2130 ... 74LS04 ... ltaje LM317A ... ... e precisión de 10 vueltas ...
CAPÍTULO 1.- Introducción
Los sistemas de control tienen una gran relevancia en los procesos tecnólogicos modernos, ya que brindan grandes beneficios a través de su uso. La aplicación de la teoría de control a problemas prácticos ha sido demostrada en muchas ocasiones diseñando leyes de control para sistemas modernos simples y complejos. [9]Entre algunas de las dificultades que presentan estas aplicaciones se encuentran las dinámicas no modeladas, las no linealidades asociadas tanto al sistema como a las incertidumbres, las perturbaciones y los cambios en los parámetros. Un ejemplo típico de sistema inestable es el péndulo invertido.
El péndulo invertido es uno de los sistemas más empleados en la educación de la teoría de control moderna, se compone básicamente de un brazo articulado montado en un carro, que puede moverse de forma horizontal; [2] el brazo se mueve libremente alrededor de la articulación en el carro, y el objetivo del control es llevar el brazo al punto de equilibrio.
A la fecha, se han propuesto diversas aproximaciones del control y estabilidad del péndulo, como son:
1) Mikukcic y Chen [17] crearon un conjunto de reglas difusas para el control del péndulo invertido por el método de agrupación.
2) Kawaji y Maeda [18] construyeron un controlador difuso simple que detectaba y mantenía en posición vertical el péndulo mediante una tarjeta virtual, pero a este controlador se le dificultaba estabilizar completamente el péndulo en un tiempo pequeño.
3) Kyung y Lee [19] presentaron un controlador difuso cuya base de reglas fue derivada de tres redes neuronales. Aunque este controlador lograba estabilizar el péndulo en 8 segundos, necesito 396 reglas, para lograr el control adecuado.
Una de las principales aplicaciones de éste sistema es en el diseño de control de la postura y caminata de robots bípedos, posición satelital con respecto a antena, el transportador personal segway, entre otros.
En el Instituto Politécnico Nacional Bárcenas Cortes Luis Mario y Pérez Martínez Cesar [21] diseñaron un controlador difuso para un sistema péndulo invertido, el cual consta de 81 reglas y en donde el análisis únicamente se realiza en el controlador difuso.
En la Facultad de Ingeniería de la Universidad Nacional Autónoma de México, José Antonio Montiel Ramírez [22], realiza un controlador difuso para un sistema péndulo invertido el cual consta de 27 reglas utilizando un método de defusificación singletons. Dicho control está basado solo en las variables del ángulo y la velocidad angular, por lo que no controla la posición del móvil.
1.1 .- Objetivos
a) General
Diseñar e implementar un algoritmo de control utilizando lógica difusa para la estabilización de un péndulo invertido rotante de un grado de libertad.
b) Específicos
Obtener un modelo matemático que describa el comportamiento dinámico del péndulo invertido montado sobre un móvil.
Diseñar una estrategia de control difuso para controlar la posición del móvil manteniendo al péndulo invertido acoplado en su punto de operación inestable.
Implementar el algoritmo de control obtenido en MATLAB simulink para ilustrar sus propiedades y principio de funcionamiento.
Comparar el desempeño de la estrategia propuesta contra otra de control clásico tomada de la literatura a partir de sus simulaciones.
Analizar la estabilidad del controlador diseñado empleando los métodos de trayectoria lingüística y de trayectoria sobre los planos de fase.
1.2 .- Justificación del proyecto
Actualmente nuestra institución no cuenta con equipo de laboratorio que apoye las materias impartidas en el plan de estudio, dejando a estas en su mayoría en análisis matemático y simulación. Con lo cual, el prototipo del péndulo invertido servirá como apoyo a prácticas de laboratorio para las materias de control inteligente, sistemas no lineales, control analógico, servomecanismos, entre otras. Debido a que el péndulo invertido es el ejemplo básico con el cual podemos entender las aplicaciones del desarrollo a nivel industrial.
Este proyecto puede ser aplicado no solo a nivel educativo, debido a que, al contar con técnicas de control moderno, podemos encontrar ejemplos en la industria, tal es el caso de los segway1 que día a día siguen innovándose exponencialmente, además de aplicarse en robots, satélites modernos, entre otros. [16]
La lógica difusa ha surgido como un método importante para el control de subsistemas y procesos industriales complejos, así como, también para la electrónica de entretenimiento y hogar, sistemas de diagnóstico y otros sistemas expertos. [15]
Al realizar la comparación entre ambas técnicas de control (clásico y difuso) se podrá observar el desempeño de ambas de forma simulada para comprender algunas de las ventajas y desventajas que presenta una de la otra.
1
Vehículo de transporte ligero giroscópico de dos ruedas, con auto balanceo controlado. Es producido por la
1.3.- Planteamiento del problema
El proyecto a desarrollar de manera simulada y física es un algoritmo de control utilizando lógica difusa un péndulo invertido rotante; con el cual se controlará el péndulo tanto en el ángulo como en la posición del carro tomando en cuenta las diversas características que afectan su equilibrio, como son las perturbaciones, longitud, velocidad, masa, fuerza, fricción y gravedad.
Se desea implementar este estudio y proyecto para acrecentar el interés en la comunidad politécnica, debido a que no solo tiene fines académicos si no también puede ser utilizado para fines de investigación y lucro. Las limitaciones en las aplicaciones que derivan del péndulo solo se ven limitadas por la imaginación de quien lo utiliza.
Los péndulos invertidos existentes en su gran mayoría están basados en el diseño del control solo en el ángulo y están realizados por un control PID, es decir, control proporcional integral derivativo.
Con el control difuso se puede lograr un control más eficiente y con mejor ahorro de energía ya que utiliza un proceso más complejo pero reducido en software comparado con el PID.
CAPÍTULO 2.- Marco teórico
2.1.- Lógica difusa
La lógica difusa es una extensión de la lógica clásica diseñada para permitir el razonamiento sobre conceptos imprecisos. Así podremos formalizar proposiciones como “la velocidad del motor es muy alta” o “el paciente tiene una fiebre
moderada”, que son difíciles de representar adecuadamente en la lógica clásica. Básicamente, la lógica difusa es una lógica multivaluada que permite una gradación continua en el valor de verdad de una proposición, al poder utilizar cualquier valor en el intervalo {0,1}. [4]
Actualmente, la lógica difusa se aplica sobre todo al desarrollo de sistemas expertos difusos. El uso de conceptos difusos permite definir reglas que formalicen conocimiento impreciso de manera natural (por ejemplo, “si el paciente tiene fiebre
alta y es muy joven, entonces la dosis debe ser moderada”). En particular, el número de aplicaciones en el área de ingeniería y control industrial es muy elevado, ya que los sistemas difusos permiten, formulando reglas sencillas, conseguir un “control suave” de los procesos.
2.2.- Control difuso
El control difuso es una clase de los sistemas basados en conocimiento KBS2. Una definición muy general para un sistema KBS es la siguiente:
Un KBS para el control de lazo cerrado es un sistema de control que mejora el funcionamiento, la confiabilidad y la solidez de control mediante la incorporación de conocimiento que no puede ser incluido en el modelo analítico en el cual se basa el diseño de un algoritmo de control, conocimiento que es usualmente considerado por modos manuales de operación o por otros mecanismos lógicos auxiliares. [3]
2
Un sistema de control difuso es un sistema experto en tiempo real, que implementa parte de la experiencia de los operadores, la cual por sí misma no se puede expresar fácilmente, como los parámetros de un control PID o como ecuaciones diferenciales (sean estas lineales o no lineales, continuos o discretos).
2.3.- Funciones de membrecía
Los valores lingüísticos adoptados por las variables en la regla antecedente y consecuente, y la representación simbólica de las normas son lo suficientemente buenos para permitir un análisis cualitativo sobre la estabilidad del sistema de lazo cerrado. Sin embargo, para las necesidades de la descripción cuantitativa del comportamiento del sistema de lazo cerrado, con la participación del cálculo de la salida de control cuantitativo, se necesita una interpretación cuantitativa del significado de los valores lingüísticos. Permitiendo los dominios físicos de
, ∆ , ∆ , ∆ , ∆ respectivamente. Los elementos de estos dominios se
denotan por , ∆ , ∆ .El significado o interpretación de un valor particular LX lingüística de una variable x viene dada por conjuntos difusos o definido en
el dominio (el universo del discurso) X de x como:
/
Ahora suponiendo eso ∆ ∆ , , , , , , , . ., los
términos del conjunto que contienen los valores lingüísticos de las tres variables lingüísticas son iguales. En este caso tenemos que definir veintiún funciones de pertenencia que representa el significado de cada valor lingüístico del plazo fijado por encima de los respectivos dominios , ∆ ∆ .Para la eficiencia computacional, el uso eficiente de la memoria, y las necesidades de análisis de rendimiento, se requiere una representación uniforme de las funciones de pertenencia. Esta representación uniforme se puede lograr mediante el empleo de
3
funciones de membresía de una forma uniforme y definición paramétrica y funcional.
Figura 2.1.- Mapeo del conjunto de términos de error normalizados en el
dominio [-6,6]
Las opciones más populares para la forma de la función de membresía son triangulares, trapezoidales, y las funciones en forma de campana. Estas tres opciones se pueden explicar por el ápice que se puede obtener de una descripción paramétrica y funcional de la función de pertenencia, almacenar la memoria ápice uso mínimo, y manipulados de manera eficiente, en términos de requisitos de tiempo real, por el motor de inferencia. Las figuras 2.2, 2.3 y 2.4 representan las tres opciones para las funciones de membresía. [3]
Figura 2.2. Función de membresía triangular ; , ,)
1
Figura 2.3. Función de membresía trapezoidal ∏ ; , , ,
Figura 2.4. Función de membresía de forma campana ; ,
Es fácil ver que la descripción paramétrica y funcional de la función de membresía de forma triangular es la que predomina en este tipo de funciones de membresía.
Una vez que la forma de la función de membresía se ha seleccionado, hay que asignar cada elemento del conjunto de términos en el dominio de la variable lingüística correspondiente.
En un conjunto bien definido, la pertenencia o no pertenencia de un elemente x a un conjunto A se describe mediante la función característica como se describe a continuación.
, ,
1
α β γ
1
Dicha función es llamada función de membresía de A, y está definida para todos los elementos del universo, esta función hace un mapeo de todo el universo U a su conjunto de evaluación de dos elementos {0,1}, esto se escribe como:
: ,
La asignación de los valores lingüísticos de una variable en su dominio puede afectar al rendimiento de la FKBC de varias maneras.
Generalmente se aplican funciones de transferencia triangulares, cuando el sistema difuso se emplea como estrategia de control, y gaussianas, cuando se emplea el sistema difuso como aproximador universal, en los antecedentes y pulsos unitarios en los consecuentes. Las funciones de membresía en las que el ancho derecho e izquierdo coincide se denominan simétricas, en caso contrario asimétricas. Al punto en el que se cortan dos funciones de membresía se le denomina punto de cruce. El nivel de cruce es el grado de membresía que adquiere el punto de cruce en cualquiera de las dos funciones de membresía. Al número de puntos de cruce entre dos funciones de membresía se denomina relación de punto de cruce. Las funciones de membresía de los antecedentes, con respecto a estos últimos parámetros, suelen ser de tal forma que el nivel del punto de cruce es distinto de cero.
2.4.- Conjuntos difusos
La lógica difusa trabaja con conjuntos a los cuales llamamos conjuntos difusos, estos conjuntos están definidos por sus funciones de pertenencia, la cual expresa la distribución de verdad de una variable.
Un conjunto difuso se puede definir matemáticamente al asignar a cada posible individuo que existe en el universo, un valor que representa su grado de membresía en el conjunto difuso. Este grado de membresía indica cuando el elemento es similar o compatible con el concepto representado por el conjunto difuso.
2.5.- Tipos de sistemas difusos
Generalmente se consideran tres tipos de sistemas de control difuso. El tipo I es el clásico que se usó por primera vez en el control de una máquina de vapor por Mamdani. En este tipo de sistemas se usan conjuntos difusos en la premisa y en la consecuencia de cada regla. [15]
: Si ( ) y … y
Entonces … …(1)
Donde , , , … , son conjuntos difusos para ,
, , … , los conjuntos difusos para , , … , son los conjuntos
difusos para , con sus funciones de pertenencia
, , respectivamente. … son los conjuntos difusos
para .
Existen varios métodos para implementar la inferencia difusa con este tipo de reglas, y de obtener el valor numérico de la conclusión final (defusificación).
El segundo tipo de sistemas de control difuso es aquél con consecuente de tipo singleton, es decir, un número real. Estos sistemas de tipo II son realmente un caso especial de los de tipo I.
: Si ( ) y … y
Entonces … …(2)
Siendo … un número real. Los sistemas de típo II se utilizaron primero como controladores difusos, para el control de seguimiento de automóviles, y posteriormente en el control de un brazo robot (Ishikawa, 1988). Un sistema de control difuso de tipo I es lingüísticamente aceptable, ya que utiliza variables difusas en ambas partes, premisa y consecuencia. Por el contrario, los sistemas de tipo II tienen la ventaja de que se puede reducir el numero de parámetros en el consecuente de cada regla, gracias a que la consecuencia es un número real.
Los sistemas de tipo III consisten en un conjunto de reglas, cada una de las cuales definen un sistema dinámico de orden n localmente válido. Se expresan de la siguiente forma:
: Si ( ) y … y
Entonces … ∑ … …(3)
Este tipo de sistemas (Sugeno, 1985) y (Takagi and Sugeno, 1985) se utilizó como controlador por primera vez en el control de un modelo de coche.
Como se puede observar, los sistemas de tipo II, de nuevo, son un caso especial de sistemas de tipo III.
La necesidad de disponer de métodos de análisis de estabilidad para el diseño de controladores difuso basados en modelos se discute en (Sugeno, 1985). En lo que concierne al sistema del tipo I, en (Braae and Rutherford, 1979) se suministra un modelo difuso de un sistema no lineal y se diseña un controlador difuso para que
Ri1...in
el sistema en cadena cerrada, descrito por reglas difusas, sea estable. Su método es heurístico, pero muestra el objetivo del control difuso.
Existen muchos trabajos sobre la estabilidad de sistemas de control difuso de tipo I. La mayoría de esos trabajos se centran en el estudio de las características de los controladores difusos, sin tener en cuenta las propiedades de los modelos difusos de los sistemas a controlar. En esos trabajos se lleva a cabo un análisis de estabilidad del conjunto sistema no difuso con controlador difuso, y tratan el segundo como un controlador no lineal. Como tal, reducen el problema de análisis de estabilidad a la teoría clásica de estabilidad no lineal, como por ejemplo, el análisis en el plano de fases para sistemas no lineales de bajo orden. En (Hojo et al., 1992) y (Kickert and Mamdani, 1978) se presenta una aplicación de la función descriptiva al análisis de la estabilidad de un sistema lineal con un controlador difuso.
Otro enfoque muy estudiado ha sido el uso del criterio del círculo y su versión extendida: el criterio de conicidad.
En otra línea, hay muchos estudios de estabilidad en el ajuste del control de modo deslizante (SM) o sistemas de estructura variable. La idea está en lograr un control robusto con el diseño de un controlador difuso de modo deslizante, que cambie su estrategia de control con una superficie de conmutación.
Con relación a la robustez de la estabilidad, existen índices de estabilidad (Ollero et al., 1995), basados en la teoría cualitativa.
Finalmente, existen muchos estudios sobre la estabilidad de los sistemas de control descritos mediante relaciones difusas que, sin embargo, no parecen prometedoras. Aunque incluyen teóricamente las expresiones de reglas del tipo si - entonces, las expresiones difusas relacionales llegan a ser muy complicadas en el caso multivariable.
heurístico, y que el sistema a controlar no sea un sistema difuso sino un sistema lineal.
En la teoría clásica de control, el análisis de estabilidad de un sistema de control está basado en el análisis de sistemas dinámicos no forzados, es decir, un sistema sin entrada de control. Por lo tanto, lo que se necesita en primer lugar es un método de análisis de estabilidad para sistemas dinámicos difusos no forzados. Siempre que se considere un sistema de tipo III, el análisis de estabilidad está siendo planteado según esta idea.
La estabilidad de un sistema no forzado de tipo III fue en primer lugar analizada para el caso discreto en (Tanaka and Sugeno, 1990), donde se aplicó el enfoque de la función de Lyapunov. Otros trabajos relacionados con la estabilidad, (Kawamoto et al., 1993) y (Tanaka and Sugeno, 1992), tratan tanto los sistemas de tiempo discreto como los de tiempo continuo.
2.6.- Modulo de fusificación
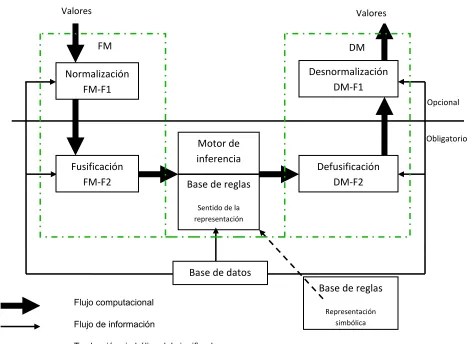
La estructura principal de un FKBC se ilustra en la figura 2.5 y se conforma de los siguientes componentes:[3]
El módulo de fusificación (FM) realiza las siguientes funciones:
FM-F1: realiza una transformación de escala (a la normalización de entrada) que asigna los valores físicos de las variables de estado del actual proceso de normalización (dominio normalizado). También asigna el valor normalizado de la variable de control de salida sobre su dominio físico (desnormalización de salida). Cuando un dominio normalizado no se utiliza, entonces no hay necesidad de FM-F1
FM-F2: Realiza la llamada fusificación que convierte un point-wise, al valor actual de una variable de estado del proceso en un conjunto difuso, con el fin de hacerla compatible con la representación de conjuntos difusos de la variable de estado del proceso en el antecedente de la regla.
Elección de la estrategia de fusificación:
La elección es determinada por el tipo de motor de inferencia o de activación de la regla empleada en el uso particular de un FKBC. Por lo tanto solo hay dos opciones disponibles:
1.- Fusificación en el caso de que la inferencia este basada en la composición. 2.- Fusificación en el caso de que la inferencia este basada en la regla individual.
Flujo computacional
Flujo de información
[image:21.612.82.553.101.445.2]Traducción simbólica del significado
Figura 2.5.- Estructura de un FKBC
2.7.- Base de conocimientos
La base de conocimientos de un FKBC consiste en una base de datos y una base de reglas.
Las funciones básicas de la base de datos es proporcionar la información necesaria para el buen funcionamiento del módulo de fusificación, la base de reglas, y para el módulo de defusificación. Esta información incluye:[3]
Conjuntos difusos (funciones de membresía) representa el significado de los valores lingüísticos del estado del proceso y las variables de control de salida.
Normalización
FM‐F1
Desnormalización
DM‐F1
Fusificación
FM‐F2
Defusificación
DM‐F2
Motor de
inferencia
Base de reglas
Sentido de la representación
Base de datos
Base de reglas
Representación simbólica Estado del proceso nítido Valores Salida de control nítido Valores
FM DM
Opcional
Dominios físicos y sus homólogos normalizados junto con la normalización/desnormalización (ampliación) de sus factores.
Si el dominio del estado del proceso y las variables de control de salida se han discretizado, la base de datos también contiene información sobre la cuantificación (discretización). Para el caso predominante continuo y dominios normalizados los parámetros de diseño de la base de datos incluyen:
Elección de las funciones de membresía Elección de los factores de escalamiento
La función básica de la base de reglas es representar de una manera estructurada la política de control de la experiencia del proceso de un operador en forma de un conjunto de normas de producción, tales como:
Sí (proceso del estado) entonces (salida de control)
La parte ‘Si’ de esta norma se llama antecedente de la regla y es la descripción de un estado del proceso en términos de una combinación lógica de las proposiciones atómicas difusas. La parte ‘entonces’ de esta norma es llamada la consecuencia de la regla y es también una descripción de la salida de control en términos de combinaciones lógicas de las proposiciones difusas.
2.8.- Motor de inferencia
Has dos tipos básicos de métodos empleados en el diseño del motor de inferencia de un FKBC: [3]
1) Composición a base de inferencia (disparo) 2) Regla individual de inferencia de base (disparo)
base de reglas. La contribución de cada individuo representa los valores de las variables de control de salida calculado por una sola regla. La salida del módulo de fusificación, que representa los valores actuales, nítidos de las variables de procesos de estado, se corresponde a cada antecedente de la regla y un grado de satisfacción de la altura de cada regla establecida. El conjunto de todos los valores de salida de las normas de control representan el valor total de salida de control, en este contexto los parámetros de diseño para el motor de inferencia son los siguientes:
Elección de representar el significado de una norma única de producción. Elección de representar el significado del conjunto de normas.
Elección del motor de inferencia.
Probar el conjunto de reglas para consistencia e integridad.
En esta etapa se realiza la tarea de calcular las variables de salida a partir de las variables entrada, mediante las reglas y la inferencia difusa, entregando conjuntos difusos de salida.
2.9.- Módulo de defusificación
Las funciones del modulo de defusificación (DM) son las siguientes: [3]
DM-F1: Realiza la llamada defusificación la cual convierte el conjunto de los valores de las salidas modificadas en un solo valor del point-wise.
DM-F2: Realiza una salida desnormalizada a la cual se le asigna el valor del point-wise de la salida de control, en su dimensión física. DM-F2 no es necesaria si los dominios no normalizados se utilizan.
El parámetro de diseño del DM es:
Elección del operador de defusificación.
∑ ∑
Donde q es el número de niveles de cuantización de salida, Zj es la suma de las
salidas de control en el nivel de cuantización j y representa los valores de la función de membresía en c. En otras palabras este método asigna el centro del área de la salida difusa final al valor defusificados.
[image:24.612.207.402.238.340.2]El centro de área también es llamado centro de gravedad o centroide.
Figura 2.6.- Método de defusificación de Centro de Área (COA)
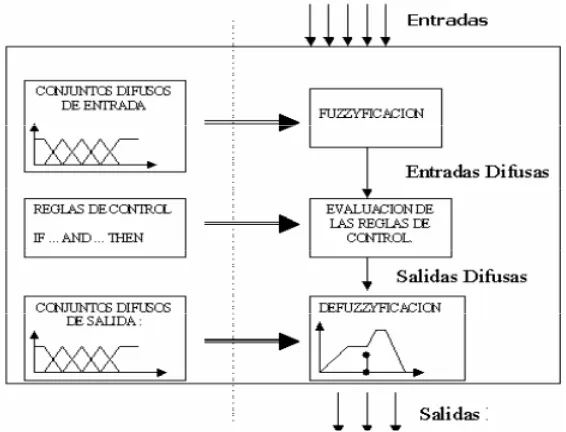
En la figura 2.7 se describen los pasos para poder realizar un sistema difuso, esto es, si tenemos una entrada (valor numérico), se puede representar este valor con una variable lingüística de un peso dado, después se realiza la evaluación de las reglas que son las que gobiernan el sistema difuso, por último se vuelve a pasar de una variable lingüística a un valor numérico.
[image:24.612.169.452.481.697.2]2.10.- Base de Reglas
Los parámetros de diseño de la base de reglas incluyen: [8]
Elección del estado de proceso y las variables de control de salida.
Elección de los contenidos de la regla antecedente y de la regla consecuente.
Elección de los conjuntos de términos (rangos de valores lingüísticos) para el estado del proceso y las variables de control de salida.
Derivación de la serie de reglas.
Las reglas usadas en un sistema de base de reglas son generalmente expresadas en una forma tal como:
“Si x es A entonces y es B”
Donde A y B son conjuntos difusos, x esta en el dominio de A y y en el dominio de
B. Esto suena como una implicación, como “A implica B”. Hay muchas generalizaciones de la operación de implicación lógica clásica a los conjuntos difusos. Pero la mayoría de los mecanismos de inferencia usados en sistemas de control lógico difusos no son generalizaciones de la implicación clásica.
El razonamiento aplicado en lógica difusa es a menudo descrito en términos generalizados
Premisa 1 x es
Premisa 2 Si x es A entonces y es B
Conclusión y es
Donde , , , son conjuntos difusos que presentan conceptos difusos. El
cálculo de puede llevar a cabo a través de una norma básica de inferencia
llamado de composición, a saber, o donde R es una relación difusa que
relativamente pequeño de reglas difusas para caracterizar una relación compleja entre dos o más variables. Una serie de fórmulas se han propuesto para esta implicación, la más común es la conjunción de composición.
,
Entonces se define como:
Describiremos dos métodos de inferencia (método de Mamdani y método de Takagi-Sugeno-Kang) comúnmente usados para interpretar un conjunto de reglas.
Si x es Ai, entonces y es Bi, i=1,2,…,n
Aquí se contiene las reglas difusas que encierran el conocimiento necesario por la solución del problema de control. Las reglas de control constan de regla
si<condiciones>entonces<acciones>.
2.11.- Modelo Mamdani
Dadas las reglas “Si x es Ai entonces y es Bi,”[8]
, … ,
Donde:
, , … ,
Se combinan en el modelo Mamdani como:
,
Para cada k-tupla
Esto da un conjunto difuso Rx definido por:
Notar que para la expansión del conjunto de reglas
Ri : Si Ai1 y Ai2 y … y Aik entonces Bi, i=1,2,…,n
Se ve como:
, , … , , …
En control difuso, el número … es
llamado la fuerza de la regla Ri para la entrada x. El conjunto difuso ,
es llamado como la salida de control de la regla Ri para la entrada x,
y el conjunto difuso Rx (y) es la salida de control de agregados para la entrada x.
En la figura 2.8 se muestra el diagrama de bloques de un sistema de control basado en el modelo Mamdani, dicho sistema consta de cuatro partes.
Figura 2.8.- Estructura de un controlador difuso Mamdani.
Interface de
Fusificación
Base de Reglas
Máquina
de inferencia
Defusificación
Entrada
no difusa
Salida no
2.12.- Modelo Takagi-Sugeno-Kang (TSK)
Para el modelo TSK, las reglas están dadas de la forma:[8]
Ri : Si x1 es Ai1 y x2es Ai2 y … y xik es Aik
Entonces:
, , … , , , , … ,
O
Ri : Si x1 es Ai entonces:
, , , … ,
Donde:
, , … ,
Son funciones:
…
Esas reglas son combinadas y obtenemos la siguiente función:
… …
Por lo tanto, este modelo produce una función real valorada.
2.13.- Análisis de estabilidad de sistemas difusos
está totalmente garantizada. Tal vez uno de los inconvenientes que habría si no existiera un método de análisis de estabilidad, sería que no se podría aplicar un enfoque basado exclusivamente en modelos para el diseño de controladores difusos. [15]
El diseño de un controlador difuso basado en reglas implica la necesidad de una técnica de estabilidad. La carencia de herramientas para el análisis dinámico de este tipo de sistemas supuso durante años una dura crítica. Como hemos dicho, la eficiencia del FLC no implica que la estabilidad del sistema esté totalmente asegurada.
Entre las muchas dificultades que presenta el análisis de estabilidad global y asintótica de sistemas de control difuso, está el caso en el que dicho sistema es localmente estable en un determinado punto de trabajo. Pero para sistemas no lineales esta estabilidad sólo está garantizada alrededor de dicho punto. En estos casos, el sistema puede ser localmente estable alrededor del punto activo de trabajo pero no globalmente estable.
2.13.1.- Consideraciones acerca de la estabilidad de sistemas difusos
El concepto de estabilidad es básico en todos los sistemas de control, siendo los sistemas de control difuso un caso especial de sistemas de control no lineal. Esto significa que los métodos de análisis de estabilidad y los resultados de la teoría de sistemas no lineales, como el método de Lyapunov, se pueden aplicar también a los sistemas difusos. A la estabilidad de Lyapunov se ha prestado mucha atención en los últimos años, lo que posiblemente haya sido fomentado por la existencia de métodos de optimización numérica convexa para la búsqueda de funciones de Lyapunov. [15]
difuso, pero el de la planta no. De hecho, la mayoría de los sistemas experimentales usados para el diseño de sistemas de control difuso, como el péndulo invertido, un sistema de pelota y balancín, son de esta naturaleza.
2.13.2.- Estado del arte de estabilidad de sistemas difusos
En este apartado se recogen las principales líneas de investigación que tratan de dar una solución global al análisis de estabilidad de sistemas difusos.
2.13.2.1.- El Plano de Fases o Análisis Geométrico
Inicialmente, el controlador difuso se analizó mediante métodos tradicionales algebraicos, los cuales tienen éxito particularmente en el análisis de la estabilidad, siempre que el proceso sea modelado también algebraicamente. Estos métodos tienen la limitación de que el modelo algebraico puede ser utilizado también para modelar el controlador difuso. Mediante esta técnica, se obtienen controladores difusos eficientes, especialmente para controlar sistemas no lineales de bajo orden. [15]
En (Braae and Rutherford, 1979) se propuso una trayectoria lingüística del plano de fases para analizar y mejorar la estabilidad, modificando las reglas de control. El sistema será estable si la trayectoria lingüística converge al punto de equilibrio.
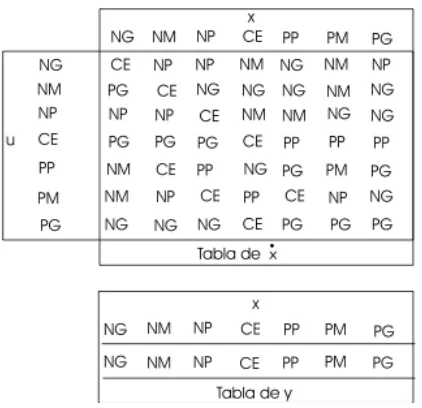
Como ejemplo, se considera el sistema lingüístico representado mediante las siguientes ecuaciones:
, …(4)
Φ …(5)
Figura 2.9.-Reglas difusas mediante el plano de fases.
Por ejemplo, el elemento NM en la matriz representa la regla:
: Si u es PP y x es NG entonces es NM y el elemento NG, la siguiente regla
: Si x es NG entonces y es NG
Siendo y la salida del sistema.
Cuando u es PP y x es NG, entonces el cambio del estado es NM. Esto quiere decir que el estado del sistema x se hace más negativo. Dado que el sistema alcanza su máximo valor lingüístico negativo, esta situación revela su inestabilidad lingüística.
2.13.2.2.- Criterio del Círculo
La aplicación del criterio del círculo a sistemas difusos, se utiliza el criterio del círculo para el análisis de la estabilidad de los sistemas de control difuso.
El problema es estudiar la estabilidad en el origen para una clase de no linealidades que satisfacen la condición de sector dada. Si el origen es global y asintóticamente estable para todas las no linealidades en el sector, el sistema se denomina absolutamente estable. Este problema se denomina también problema de Lur. [15]
Debido a que un sistema con FLC es un sistema no lineal, hay que llevar a cabo dos análisis diferentes de estabilidad: un análisis local alrededor del punto de trabajo y otro global, para comprobar si existen otros puntos de equilibrio o ciclos límites. Para analizar el problema de estabilidad local en sistemas de control difuso, se han aplicado algunos de los métodos tradicionales para análisis de estabilidad de sistemas no lineales de control (Wang, 1997) y (Yager and Filev, 1994). El criterio del círculo y el criterio relacionado de Popov, han sugerido también ideas para analizar la estabilidad de sistemas difusos del tipo de Mamdani sobre una planta lineal.
Estos métodos se pueden aplicar a sistemas no lineales que puedan representarse mediante un sistema lineal realimentado con un elemento no lineal. En el caso del control difuso, como elemento no lineal se tienen las reglas difusas de tipo I, como se ve en la figura 4.10
La aplicación del criterio del círculo al análisis de estabilidad absoluta de un sistema realimentado con una no linealidad ϕ, y con limites en un sector, se muestra en la figura 4.11.
Figura 4.11.- No linealidad limitada por un sector.
[image:33.612.239.381.147.288.2]En el caso de sistemas MIMO (ver figura 4.12), se supone que G(s) es una matriz de función de transferencias cuadrada m × m racional para un sistema lineal, y asintóticamente estable. El elemento no lineal Φ(e,t) es una matriz diagonal.
Figura 4.12.- Un sistema MIMO realimentado con un controlador no lineal.
Φ , Φ , , , , … ,
m es el número de entradas y salidas en el caso de que el sistema sea una matriz cuadrada, y las funciones Φ , cumplen la restricción:
Φ ,
Si el sistema es diagonal-fila dominante,
| | ̂ ∑ | | …(6)
Mientras que si el sistema es diagonal-columna dominante,
| | ̂ ∑ | | …(7)
Siendo el elemento ki de .
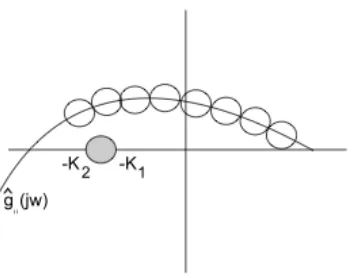
[image:34.612.220.396.335.474.2]Así, el sistema MIMO es global y asintóticamente estable, si la banda de Nyquist del modelo de la planta inversa evita el origen y el círculo de diámetro , , y rodea a ambos el mismo número de veces en sentido horario, tal y como se refleja en la figura 4.13.
Figura 4.13.- La banda de Nyquist inversa de un sistema no lineal MIMO realimentado
La aplicación del enfoque de tipo Lur a la estabilidad de sistemas de control del tipo I, produce sólo resultados conservadores, ya que considera el control basado en reglas como un controlador no lineal. Y cuando se adapta o se introduce un controlador difuso en un controlador no lineal, se pierden algunas características del controlador difuso, debido al uso de un sólo límite de sector.
2.13.2.3.- Criterio de conicidad
sistemas de control difuso en (French and Rogers, 1998), (Kang et al., 1998) y (Ray et al., 1984).[15]
La restricción de que el sistema lineal de la figura 4.14 debe ser Hurwitz, se puede evitar usando la transformación de lazo mostrada en la figura 4.15. Un sistema que no es Hurwitz con una no linealidad que cumple la condición del sector con K≠0, se puede expresar de la forma anterior, utilizando la realimentación mostrada en la figura 4.15. El nuevo sistema lineal queda expresado de la forma:
[image:35.612.207.402.482.633.2]y la nueva no linealidad pertenece al sector [0,K], con . Esto conduce al criterio del círculo multivariable (Criterio de conicidad).
Figura 4.14.- Descomposición del sistema
Según el teorema de pequeña ganancia, un sistema realimentado compuesto de dos sistemas estables es estable, si el producto de las ganancias es menor que uno, es decir, si
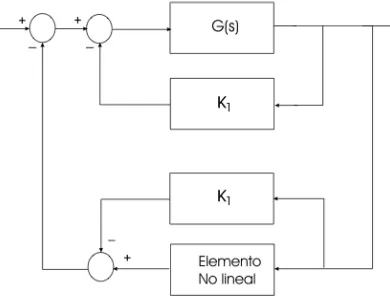
En (Cuesta et al., 1999) se muestra la aplicación de los métodos en el dominio de la frecuencia a sistemas MIMO. El método propuesto está basado en la formulación del problema de Lur, tal y como se muestra en la figura 4.10, donde el sistema difuso T-S se puede descomponer en una parte lineal y en otra no lineal. Además, esta técnica lleva directamente a la aplicación de técnicas de estabilidad de entrada/salida, tales como el criterio de conicidad.
El sistema difuso representado mediante el modelo T-S es:
: Si ( … ) entonces
… … …(8)
Siendo el peso de cada regla
… … …(9)
La ecuación (8) se puede escribir como
∑ … ∑ … … … … …(10)
es decir, que las partes lineal y no lineal se pueden separar, y el modelo T-S resultante se muestra en la figura 2.16.
Figura 2.16.- Descomposición del modelo T-S
2.13.2.4.- Criterio de Popov
Este criterio se aplica solamente a no linealidades invariantes con el tiempo. Considérese el sistema de la figura 2.24.3.4.1, siendo φ la no linealidad invariante en el tiempo, que satisface el sector [0, K], con K diagonal positiva. Si la parte lineal G(s) es asintóticamente estable, el sistema realimentado es estable siempre que exista un tal que
Si Re[G(jw)] se dibuja frente a wIm[G(jw)], tomando w como parámetro, entonces la condición se cumple si el diagrama resultante está a la derecha de la línea que intercepta −1/K con la tangente −1/ . Este diagrama se denomina diagrama de Popov.[15]
2.13.2.5.- Índices de Estabilidad
En (Ollero et al., 1995), se trata el diseño de los sistemas basados en reglas de control difuso estables y se determinan nuevas expresiones para calcular los índices anteriores. Su utilidad radica en proporcionar una medida de estabilidad relativa.[15]
El trabajo presenta procedimientos que hacen uso de estos índices, con el fin de mejorar el diseño de los sistemas de control difuso mediante la modificación de las reglas, y conseguir alcanzar la estabilidad global y mejorar el comportamiento dinámico de una planta no lineal.
El sistema de control basado en reglas con una acción de control Φ , aparece reflejado en la figura 2.17.
Figura 2.17.- Sistema de control basado en reglas.
Para el caso bidimensional, la ecuación del sistema se representa como sigue:
, , …(11)
, , …(12)
Sea J la matriz Jacobiana del sistema en el punto de equilibrio, y sea
det …(13)
la ecuación característica de J, siendo det y
La medida de la estabilidad relativa del punto de equilibrio en el origen, viene dada por los dos índices. Uno de ellos indica la pérdida de estabilidad cuando un autovalor cruza el eje imaginario. Por lo tanto, su valor ofrece una medida de cómo de lejos está el sistema de la situación donde la estabilidad se pierde.
det …(14)
El otro índice está relacionado a la pérdida de estabilidad cuando dos autovalores complejos conjugados cruzan el eje imaginario (ciclo límite).
tr …(15)
Cuanto más grande sea el valor positivo de los dos índices, más grande será el grado de estabilidad relativa. La anulación de cualquiera de ellos conduce a la pérdida de estabilidad. Los dos índices dependen de la matriz J en el punto de equilibrio y se usan para estudiar la estabilidad relativa del punto de equilibrio situado en el origen.
2.13.2.6.- Estabilidad de Lyapunov
La estabilidad de Lyapunov ha tenido históricamente mucho interés en el análisis de sistemas difusos y en el diseño de controladores difusos.[15]
Sea un sistema de la forma
Con x = 0 un punto de equilibrio.
Sea
Entonces x = 0 es estable. Además, si , entonces x = 0 es asintóticamente estable. Si además de las condiciones mencionadas anteriormente, la condición:
∞ ∞
Se cumple, entonces x = 0 es global y asintóticamente estable. Las condiciones del teorema de estabilidad de Lyapunov son sólo suficientes. El que no se cumplan no significa que el sistema no sea estable, ni global y asintóticamente estable.
Sea la función cuadrática de Lyapunov
Con P una matriz simétrica real. En este caso, V(x) es definida positiva sí y sólo sí todos los autovalores de P son positivos. Si es definida positiva, se puede decir que P es definida positiva. Para un sistema lineal , la derivada de V es
En el caso lineal, la estabilidad cuadrática de Lyapunov implica encontrar una matriz P que cumpla las dos condiciones siguientes:
…(16)
La solución se puede obtener analíticamente resolviendo la ecuación
. La solución existe si A es una matriz Hurwitz, esto es, si para todos los autovalores de A. Las funciones cuadráticas de Lyapunov se pueden utilizar para estudiar la estabilidad de sistemas del tipo
Cuando A(x) está dentro de un convexo de matrices … , … , … , … . Esto es equivalente a
∑ … ∑ … …
∑ … ∑ … …(18)
Donde … toma valores en [0,1] y ∑ ∑ … . En este caso, el
sistema es global y asintóticamente estable, si existe una matriz común P tal que
… … …(19)
Esto equivale a decir que se debe hallar una función de Lyapunov común a todos
los subsistemas lineales … . El problema de la estabilidad cuadrática de (19) no tiene solución analítica. Sin embargo, se puede solucionar mediante optimización convexa, siempre que la condición de la ecuación (19) sea LMI en P (se mencionara en 27). La estabilidad cuadrática se puede aplicar a examinar la estabilidad del modelo de T-S, tal y como se verá más adelante, ya que éste se puede describir según (17).
2.13.2.7.- Estabilidad del Modelo de Takagi-Sugeno
A raíz de la aparición del modelo T-S, se abrió una importante línea de investigación relacionada con la teoría de análisis dinámico y de estabilidad, aplicable a los sistemas difusos. Debido a que las conclusiones de las reglas que usa este modelo suelen ser sistemas lineales, los investigadores se aprovechan de la existente teoría de control lineal para su análisis. La solución aquí presentada corresponde a un modelo difuso con consecuentes afines.
Existen numerosos trabajos en la literatura centrados en el análisis de estabilidad del modelo difuso T-S. La existencia de un modelo T-S apropiado se asume previamente. En (Tanaka and Sugeno, 1992), se deriva una condición suficiente para la estabilidad global y asintótica de un sistema difuso en el sentido de Lyapunov: debe existir una función (una matriz común definida positiva simétrica
P) para todos los subsistemas, tal y como se vio en (19). Esto constituye un resultado muy importante, y se ha profundizado en él con el fin de afinar los resultados. Sin embargo, el problema de la estabilidad cuadrática de la ecuación (19) no tiene solución analítica, ya que su método es únicamente aplicable a sistemas discretos invariantes con el tiempo.
En (Lo and Chen, 1999) se analizó la estabilidad del modelo de T-S aplicando los resultados de Khartinov (Khartinov, 1979), que demuestran que una familia de polinomios es Hurwitz, si y sólo si sus polinomios extremos son Hurwitz. En el caso de tener que resolver un conjunto de desigualdades de Lyapunov, se añade la dificultad de tener que construir una función de Lyapunov, para lo cual no existe una manera efectiva analítica. Sin embargo, existen varios trabajos que tratan de resolver este problema numéricamente mediante algoritmos de programación convexos muy eficientes, incluyendo las LMI (Boyd et al., 1994), (Johansson et al., 1999).
En (Feng et al., 1997) los sistemas difusos están representados mediante una familia de modelos locales en el espacio de estado. El controlador se obtiene diseñando cada controlador local por realimentación del estado e introduciendo un controlador compensatorio. El controlador compensatorio está basado en la conocida teoría de control de estructura variable. Se demuestra que este controlador garantiza la estabilidad global y asintótica del sistema difuso en cadena cerrada.
En (Kosko, 1997), (Tanaka and Sano, 1994) y (Tanaka and Sugeno, 1992), se obtienen algunos de los resultados más importantes en el análisis de sistemas difusos. El objetivo se centra en la búsqueda de una condición de estabilidad global y asintótica para sistemas difusos. Los teoremas presentados se han aplicado a casos particulares del modelo difuso T-S, donde se supone que el término independiente es cero, lo cual significa que el sistema se linealiza en torno al origen. Esto condiciona su generalización. Como se sabe, el término independiente en un sistema lineal no afecta a la estabilidad, sino a la entrada. En los sistemas difusos no ocurre así, debido a que estos son el resultado de la inferencia de todos sus subsistemas. Esto provoca que el término independiente deje de ser constante, pasando a ser una función dependiente de las variables del sistema, de manera que influye en la dinámica resultante del mismo.
En (Al-Hadithi, 2002), (Matía et al., 2000b), (Matía et al., 2002), (Matía et al., 1999b) y (Al- Hadithi et al., 2002) se desarrolla un teorema que trata de encontrar una solución global a la estabilidad del modelo difuso general T-S, utilizando el método directo de Lyapunov para encontrar una matriz definida positiva P. El sistema difuso representado por
Figura 2.18.-El modelo general afín T-S
Que también es posible representarlo de la siguiente forma:
…(21)
Es global y asintóticamente estable, si existe un matriz P definida positiva, tal que, :
…(22)
En (Matía et al., 1999a) se presenta otro teorema similar que persigue la estabilidad global y asintótica. El sistema difuso definido por la forma general del modelo de T-S de la ecuación (21) es global y asintóticamente estable si:
1- Para un sistema de 1er orden
2- Para un sistema de 2º orden
La aplicación de estos teoremas es extensible también al análisis de la estabilidad global y asintótica de los sistemas no lineales.
mediante reglas del tipo si-entonces, que localmente representan la relación lineal entrada/salida del sistema. Cada regla del sistema libre es de la forma:
… : …
Entonces … … … … …(23)
(Tanaka and Sugeno, 1992) presentaron las condiciones suficientes de estabilidad para el sistema difuso discreto representado por la ecuación (23), haciendo la
simplificación (poco realista) , es decir … ,
, . . . , , , . . . , . Según esto, el sistema difuso definido por las reglas
mostradas en (23), con … , . . . , , que se puede representar de otra
forma como , es global y asintóticamente estable si existe una matriz P definida positiva, tal que
… … …(24)
, . . . , , , . . . , .
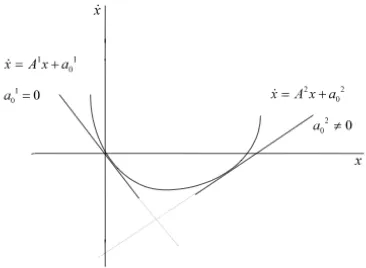
Existen también planteamientos para el modelo difuso afín. La figura 2.19 muestra un sistema difuso discreto linealizado en varios puntos de trabajo pasando por el origen. El área sombreada representa la región inestable. En esta figura se aprecia que el sistema , se encuentra acotado por los
subsistemas , por lo que sería estable si estos lo fueran
(sólo para n = 1). Sin embargo, los sistemas de la forma no existen en la práctica, pues no parece lógico ni real que un sistema se linealice en varios puntos de trabajo y que todas estas linealizaciones pasen por el origen.
estabilidad del sistema difuso linealizado por varios subsistemas de la
[image:46.612.233.380.138.292.2].
Figura 2.19.- Un sistema difuso linealizado en varios puntos de trabajo pasando por el origen.
El caso general con … ya no es tan sencillo, tal y como se muestra a
continuación. El modelo T-S de primer orden será
: entonces:
… …(25)
Aplicando la condición de estabilidad de Lyapunov a este sistema, se obtiene:
| | | | | |
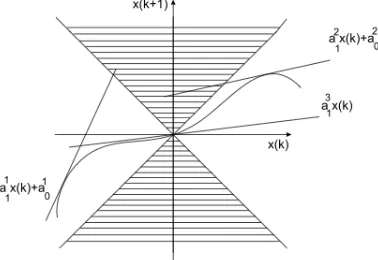
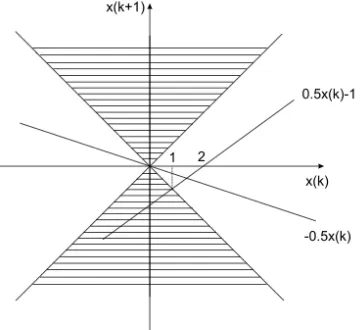
La figura 2.20 muestra el comportamiento de este sistema difuso. Como se puede observar, el sistema está linealizado en varios puntos de trabajo y no todas las
líneas pasan por el origen, como en el caso en el que . Por lo tanto, no es
posible determinar si caerá o no en la región inestable, sin tener en consideración las funciones de pertenencia (su forma y el universo de discurso).
Se ha de mencionar también que las condiciones de estabilidad propuestas en
los subsistemas (si están dentro o fuera del círculo unitario), mientras que no dependen de las funciones de pertenencia.
Figura 2.20.- Ejemplo de la estabilidad del modelo general de T-S
Otra línea de investigación (Matía et al., 2000a), (Al-Hadithi, 2002), consiste en elegir funciones de pertenencia rectangulares y analizar el efecto que éstas tienen (esto significa, conjuntos crisp) como se ve en la figura 2.21. En dicha figura, el límite de cada conjunto difuso se ha puesto en el punto de intersección de ambos subsistemas, para garantizar que se obtiene una función continua. Es siempre posible, en este caso, determinar la estabilidad del sistema difuso discreto. Lo que se consigue con este tipo de funciones de pertenencia, es que el sistema difuso (ahora lineal por tramos) no entre en la zona de inestabilidad, gracias a la
Figura 2.21.- Funciones de pertenencia rectangulares.
Figura 2.22.- Función lineal por tramos.
En (Tanaka and Sano, 1994) y (Tanaka and Sugeno, 1992), se analiza la estabilidad de un sistema, en el cual todos sus subsistemas son estables. Sin embargo, el sistema difuso resultante no lo es. Obviamente, no existe una matriz común definida positiva y, según las condiciones de estabilidad vistas, no se puede confirmar la estabilidad del sistema difuso. El modelo difuso de este ejemplo se puede representar mediante las siguientes reglas:
: ,
: ,
Las condiciones iníciales son , and , . Se puede plantear la siguiente pregunta: ¿Para que condiciones iniciales el sistema difuso es estable o no? La pregunta se puede responder estudiando el dominio de atracción del origen. El sistema difuso es:
, ….(26)
–
∆
Tal que,
| | | |, , esto es,
Sustituyendo desde (26), se obtiene
| , | | |,
, ,
Lo cual implica que,
, ,
[image:49.612.219.392.497.665.2]y cualquiera dentro del universo de discurso. Por lo tanto, dado que esto es válido k, se tiene que las condiciones iníciales deben estar en el intervalo [−1, 0,5]. La figura 2.23 muestra el dominio de atracción de estabilidad (Wang et al., 1996), donde las áreas negras representan las regiones de inestabilidad. Si se compara este rango
de valores iníciales del sistema, que aseguran la estabilidad global y asintótica, con el dominio de atracción demostrado en (Wang et al., 1996), se puede concluir que el método propuesto en (Al- Hadithi, 2002) incluye al otro.
Finalmente, los límites obtenidos de las condiciones iníciales que aseguran la estabilidad del sistema difuso, indican que cualquier condición inicial seleccionada entre estos límites conduce a un sistema difuso estable. Por otra parte, esto no significa que el sistema sea inestable fuera de esta región (la zona enmarcada por la línea discontinua) tal y como se ve en la figura 2.23.
La idea de examinar la estabilidad mediante los rangos de condiciones iníciales, permite obtener resultados altamente positivos y parece una técnica prometedora. La única limitación es que sólo se puede aplicar a sistemas de bajo orden porque en sistemas de orden elevado hay que suponer algunas condiciones iníciales para poder hallar las demás, lo que no siempre puede llevarse a cabo con sistemas reales.
2.13.2.8.- Desigualdades Matriciales Lineales (LMI)
Sea el modelo de T-S de la forma:
: …
Entonces
, , … , …(27)
Donde denota la l-ésima regla difusa, m el número de reglas,
, , . . . , son los conjuntos difusos, representa el vector de estado,
representa el vector de entrada, representa el vector de salida y , , , son las matrices del l-ésimo modelo local y
, , . . . , son algunas variables medibles.
Se supone que . El modelo T-S se puede describir como:
: …
Entonces
, , … , …(28)
También se puede escribir como:
∑ …(29)
Existen varias técnicas basadas en funciones cuadráticas por tramos. Se necesita llevar a cabo una partición del espacio de la premisa, o la partición del espacio de estado en el caso de (Cao et al., 1996a), (Cao et al., 1997). Este enfoque se denomina el primer tipo de partición. Se definen m regiones en el espacio de la variable de premisa como sigue:
| , , , … , , …(30)
Con ello, el modelo global T-S (29) se puede expresar en cada región local como:
Donde,
,
Para analizar la estabilidad, se introducen los límites superiores del término e incertidumbre ∆ en (31).
…(32)
Además, se define un conjunto Ω que representa todas las posibles transiciones entre regiones.
, | , , , , …(33)
Sea entonces la función cuadrática por tramos de Lyapunov:
,
El sistema difuso representado en (28), o su equivalente (31), es global y asintóticamente estable, si existe un conjunto de matrices definidas positivas P_l,l L tal que se satisfagan las siguientes LMI (Feng, 2004b):
, , …(34)
, , …(35)
La búsqueda de una función cuadrática por tramos de Lyapunov se formula como un problema convexo de optimización en términos de desigualdades matriciales lineales. Se estudia también la relación con los métodos basados en el dominio de la frecuencia, tales como el criterio del círculo y el criterio de Popov. Esta técnica se ha extendido con el fin de tratar los problemas de análisis de comportamientos y de control óptimo en (Rantzer and Johansson, 1997).
El enfoque se basa en la partición del espacio de la variable premisa en dos tipos de regiones. Algunas de estas regiones son crisp y otras difusas. La región crisp es aquella en la cual para . La dinámica del sistema en esta región se representa mediante uno de los modelos locales del sistema difuso descrito en ecuación (28).
La región difusa se define como la región donde , mientras que la dinámica del sistema en esta región se representa mediante la combinación convexa de varios modelos locales lineales. En un caso extremo, cuando todas las regiones del modelo T-S son de tipo crisp, es decir, para algunos valores de l, y todas las otras funciones de pertenencia son iguales a cero, el sistema dado en (29) se convierte en un sistema lineal por tramos.
, , …(36)
Con esta partición, el sistema difuso (29) queda descrito como una combinación convexa de modelos lineales:
∑ , , …(37)
Con , ∑
De forma similar a como se hizo en la ecuación (33), se define un conjunto que representa todas las posibles transiciones entre regiones del sistema (35):
Según (Wang and Feng, 2004), el sistema difuso representado en (28) o en (37) es global y asintóticamente estable, si existe un conjunto de matrices definidas positivas , tal que se satisfaga las siguientes LMI:
, , …(39)
, , Ω, …(40)
2.13.2.9.- Funciones difusas de Lyapunov
Los autores en (Choi and Park, 2003), (Guerra and Vermeiren, 2004), (Tanaka et al., 2003), (Wang et al., 2004b) y (Zhou et al., 2005), presentaron resultados sobre estabilidad basados en funciones no cuadráticas, o lo que se denomina funciones difusas de Lyapunov, que pueden ser representadas como:
∑ …(41)
(Zhou et al., 2005) demuestra que el sistema difuso (28) o (29) es global y asintóticamente estable, si existe un conjunto de matrices definidas positivas
, tal que se satisfagan las siguientes LMI:
, , …(42)
En (Kim and Kim, 2001) y (Kim and Kim, 2002), se analiza la estabilidad del modelo afín T-S, utilizando funciones cuadráticas de Lyapunov. En (Feng, 2004b), (Johansson et al., 1999) y (Wang and Feng, 2004), se desarrollan métodos de análisis de estabilidad basados en funciones cuadráticas por tramos de Lyapunov.
En (Feng, 2006) se presenta un análisis basado en el segundo tipo de partición de espacio y en las funciones cuadráticas por tramos de Lyapunov. Se define
como el conjunto de índices para las regiones que no contienen al origen. También se define:
.De forma similar a (37) con , el sistema difuso en (28) se puede escribir como sigue:
∑ , …(44)
Se utiliza la siguiente función de Lyapunov:
, ,
, , …(45)
Esta función combina la capacidad de la función cuadrática de Lyapunov cerca del punto de equilibrio, con la flexibilidad de la función por tramos en otros puntos del espacio.
Se aplica el procedimiento S (Boyd et al., 1994) para reducir el conservadurismo de los resultados de la estabilidad. Se utiliza este procedimiento (Johansson et al., 1999) para construir unas matrices , para cada región, tal que
, , …(46)
(Feng, 2004b) y (Wang et al., 2004a) demuestran que el sistema difuso descrito en (28) con , o su equivalente (44), es global y asintóticamente estable, si existen matrices simétricas , , , y matrices simétricas , , tal
que , , tengan valores no negativos y que se satisfagan las siguientes
LMI:
, …(47)
, , …(48)
, …(49)
, , …(50)
, , Ω, , , …(51)
, , Ω, , …(53)
, , Ω, , …(54)
2.13.2.10.- Estabilidad Energética de Sistemas Difusos
(Kiszka et al., 1985) propusieron criterios para el análisis de estabilidad de sistemas difusos, mediante la definición de funciones de energía. El análisis de estabilidad incluye la consideración de la dinámica difuso definida por relaciones difusas. La evaluación del comportamiento se basa en la estructura de estas relaciones difusas. [15]
Este enfoque ha sido adoptado por varios autores como (Glas, 1984) y (Tong et al., 1980). Sin embargo, estas técnicas estructurales tienen dificultades a la hora de predecir analíticamente la evolución dinámica del sistema (Chen and Tsao, 1989), y requieren condiciones conservadoras para asegurar la estabilidad (Langari and Tomizuka, 1990).
Un sistema dinámico es estable si su energía total disminuye monótonamente hasta que alcanza un estado de equilibrio, lo que encaja con el concepto de estabilidad de Lyapunov. La estabilidad de un sistema dinámico difuso está basada en la generalización de esta noción. Si un sistema difuso dinámico libre tiene un estado de equilibrio asintóticamente estable, la energía almacenada por el sistema decae con el tiempo, alcanzando su valor mínimo en el punto de equilibrio.
2.14.- Control PID
derivativa (donde la acción de control es proporcional a la derivada de la señal de error actuante).[10]
En situaciones donde muchas plantas se controlan directamente mediante una sola computadora digital, la mayoría de los lazos de control se pueden manipular mediante esquemas de control PID.
La acción de control PID en controladores analógicos está dada por
Donde e(t) es la entrada al controlador (señal de error actuante), m(t) es la salida del controlador (la señal manipulada), K es la ganancia proporcional, T, es el tiempo integral (o tiempo de reajuste) y Td es el tiempo derivativo (o tiempo de adelanto).
Para obtener la función de transferencia pulso del controlador PID digital, se puede discretizar la ecuación anterior. Donde finalmente obtenemos la siguiente ecuación:
O bien:
Donde, la ganancia proporcional es:
La ganancia derivativa es:
La función de transferencia pulso del controlador PID digital se convierte en:
[image:58.612.100.523.285.511.2]El diagrama del controlador Proporcional Integral Derivativo se muestra en la figura 2.24.
Figura 2.24.- Controlador PID
2.15.- Sistemas de control a lazo abierto
Los sistemas de control a lazo abierto son en los cuales la salida no afecta la acción de control, en otras palabras, en un sistema de control en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada. En cualquier sistema de control en lazo abierto, la salida no se compara con la entrada de referencia. Por tanto, a cada entrada de referencia le corresponde una condición operativa fija; como resultado, la precisión del sistema depende de la calibración. Ante la presencia de perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada. En la práctica, el control en lazo abierto sólo se usa si se conoce la relación entre la entrada y la salida y si no hay perturbaciones internas ni externas. Es evidente que estos sistemas no son de control realimentado. Cualquier sistema de control que opere con una base de tiempo es en lazo abierto. Por ejemplo, el control del tránsito mediante señales operadas con una base de tiempo es otro ejemplo de control en lazo abierto.[9]
2.16.- Sistemas de control a lazo cerrado