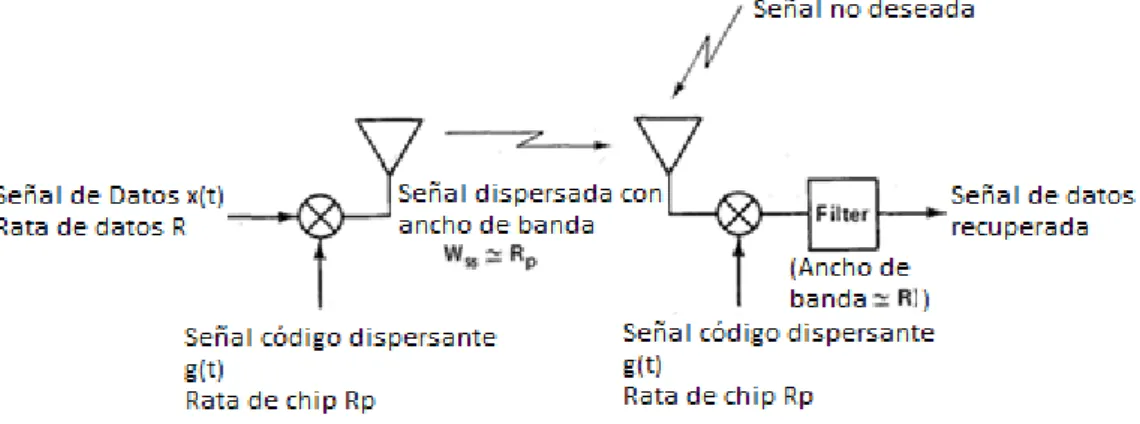
es independiente de los datos.
En el receptor la recuperación (𝑑𝑒𝑠𝑝𝑟𝑒𝑎𝑑𝑖𝑛𝑔) se realiza por la correlación entre la señal y una réplica sincronizada de la señal dispersante.
En la ilustración 1 se muestra un sistema de comunicaciones basado en espectro disperso
Ilustración 1: Espectro disperso básico
En la ilustración 2 se observael resultado de la dispersión del espectro, en presencia de ruido blanco.
Ilustración 2: Efecto de la dispersión del espectro.
2.2.1. Supresión de interferencias
En la ilustración 𝟑 se muestran tres situaciones diferentes de interferencia intencional. En el primer caso no se hace dispersión del espectro y la interferencia está distribuida en todo el espectro de la señal. En el segundo caso se hace dispersión del espectro de la señal y la señal interferente se transmite en todo el espectro de la señal dispersada pero con una densidad espectral mucho menor. En el tercer caso la señal interferente tiene una densidad espectral alta pero afecta un rango espectral pequeño de la señal de espectro disperso.
Ilustración 3: Efecto de la Dispersión del espectro en presencia de un interferente (𝑗𝑎𝑚𝑚𝑒𝑟) intencional.
En la ilustración 4 se muestra el proceso de detección de la señal dispersada en donde tanto ésta como la interferencia sufren el efecto de la correlación con la señal dispersante del receptor lo cual concentra el espectro de la señal original pero dispersa el espectro de la señal interferente produciendo como resultado una relación señal a ruido grande.
Ilustración 4: Detección de la señal de espectro disperso. (𝒂)Espectro en la entrada del receptor. (𝒃) Espectro después de la correlación con el código 𝑷𝑵 correcto y
sincronizado.
2.2.2. Reducción de la densidad de energía:
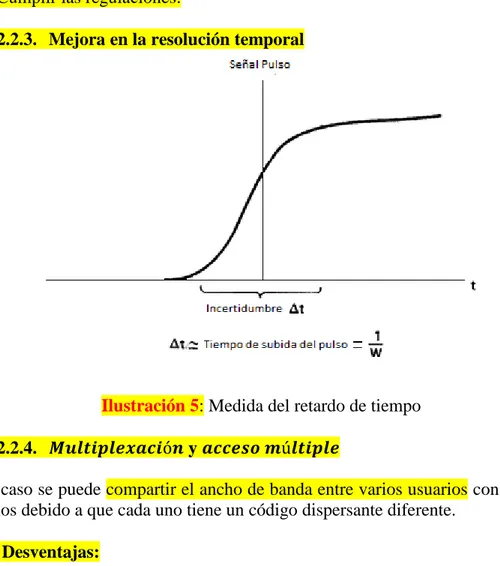
Ilustración 5: Medida del retardo de tiempo
2.2.4. 𝑴𝒖𝒍𝒕𝒊𝒑𝒍𝒆𝒙𝒂𝒄𝒊ó𝒏 y 𝒂𝒄𝒄𝒆𝒔𝒐 𝒎ú𝒍𝒕𝒊𝒑𝒍𝒆
En este caso se puede compartir el ancho de banda entre varios usuarios con privacidad entre ellos debido a que cada uno tiene un código dispersante diferente.
2.3.Desventajas:
Se requiere sincronización entre los códigos dispersantes usados en el transmisor y en el receptor.
2.4.La señal dispersante:
La señal dispersante consiste en una secuencia periódica 𝑠𝑒𝑢𝑑𝑜_𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 o secuencia de 𝑠𝑒𝑢𝑑𝑜𝑟𝑢𝑖𝑑𝑜 (𝑷𝑵: 𝑝𝑠𝑒𝑢𝑑𝑜 𝑛𝑜𝑖𝑠𝑒) la cual está compuesta por ceros y unos (llamados 𝑐ℎ𝑖𝑝𝑠), tiene propiedades similares a las del ruido blanco y debe aparecer como aleatoria para un usuario no autorizado, pero no así para los usuarios autorizados.
En aplicaciones de Espectro disperso la secuencia binaria con elementos {𝟎, 𝟏} se mapea en una secuencia binaria correspondiente {𝒄𝒏} con elementos {−𝟏, 𝟏} denominada 𝑠𝑒𝑐𝑢𝑒𝑛𝑐𝑖𝑎 𝑏𝑖𝑝𝑜𝑙𝑎𝑟.
Para lograr que la señal dispersante luzca como ruido debe cumplir las siguientes tres condiciones:
Propiedad de balance: en un periodo de la secuencia el número de unos debe diferir del número de ceros en máximo un digito (Esto significa que la suma de los elementos de la secuencia 𝑠𝑒𝑢𝑑𝑜𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 bipolar debe idealmente ser cero pero realmente vale 1 por ser una secuencia de longitud impar).
Propiedad de corrida: la corrida se define como una secuencia de dígitos binarios de un solo tipo. En cada periodo es deseable que cerca de la mitad de las corridas de cada tipo sean de longitud uno, cerca de la cuarta parte sean de longitud 2 y así sucesivamente.
Propiedad de correlación: Si se comparan un periodo de la secuencia término a término con un periodo de la misma desplazado cíclicamente, es mejor si el número de acuerdos y desacuerdos no difieren en más de uno.
La función de auto correlación de la secuencia 𝑠𝑒𝑢𝑑𝑜𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 bipolar está definida así:
𝑹𝒄(𝒎) = ∑ 𝒄𝒏𝒄𝒏+𝒎 𝑳
𝒏=𝟏
𝟎 ≤ 𝒎 ≤ 𝑳 − 𝟏
Donde 𝑳 es el periodo de la secuencia. Dado que la secuencia {𝒄𝒏} es periódica con periodo 𝑳, la secuencia de auto correlación es también periódica con periodo 𝑳.
Idealmente la secuencia 𝑷𝑵 debería tener una función de auto correlación con propiedades similares al ruido blanco:
𝑹𝒄(𝟎) = 𝑳 y 𝑹𝒄(𝒎) = 𝟎 𝒑𝒂𝒓𝒂 𝟏 ≤ 𝒎 ≤ 𝑳 − 𝟏.
2.4.2. Generación de secuencias 𝒔𝒆𝒖𝒅𝒐𝒂𝒍𝒆𝒂𝒕𝒐𝒓𝒊𝒂𝒔
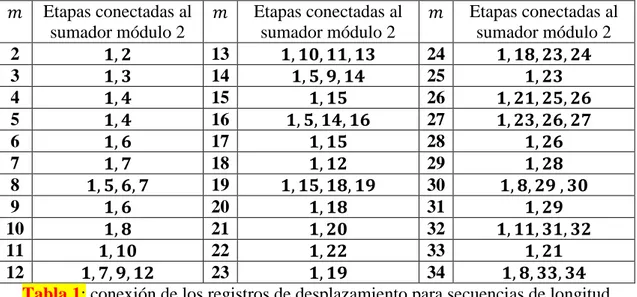
Las secuencias 𝑷𝑵 más ampliamente conocidas son las secuencias de registro de desplazamiento de longitud máxima (secuencias 𝒎), la cuales son periódicas y tienen una longitud 𝑳 = 𝟐𝒎− 𝟏 𝒃𝒊𝒕𝒔 y se generan mediante un registro de desplazamiento de 𝒎 etapas con realimentación lineal como se muestra en la ilustración 6.
Ilustración 6: Circuito que permite generar secuencias de longitud máxima.
8 𝟏, 𝟓, 𝟔, 𝟕 19 𝟏, 𝟏𝟓, 𝟏𝟖, 𝟏𝟗 30 𝟏, 𝟖, 𝟐𝟗 , 𝟑𝟎
9 𝟏, 𝟔 20 𝟏, 𝟏𝟖 31 𝟏, 𝟐𝟗
10 𝟏, 𝟖 21 𝟏, 𝟐𝟎 32 𝟏, 𝟏𝟏, 𝟑𝟏, 𝟑𝟐
11 𝟏, 𝟏𝟎 22 𝟏, 𝟐𝟐 33 𝟏, 𝟐𝟏
12 𝟏, 𝟕, 𝟗, 𝟏𝟐 23 𝟏, 𝟏𝟗 34 𝟏, 𝟖, 𝟑𝟑, 𝟑𝟒
Tabla 1: conexión de los registros de desplazamiento para secuencias de longitud máxima.
Ejemplo: Generador con 𝒎 = 𝟒 y suma de las salidas de los 𝑟𝑒𝑔𝑖𝑠𝑡𝑟𝑜𝑠 1 𝑦 4 realimentados por el 𝑟𝑒𝑔𝑖𝑠𝑡𝑟𝑜 4. En este generador la secuencia tiene 𝑙𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝟏𝟓 y se muestra en la ilustración 7, la salida de los registros se muestra en la tabla 2.
Ilustración 7: Generador de secuencias 𝒎.
Reg. 1 Reg. 2 Reg. 3 Reg. 4 realimentación
1 1 1 1 0
1 1 1 0 1
1 1 0 1 0
1 0 1 0 1
0 1 0 1 1
1 0 1 1 0
0 1 1 0 0
1 1 0 0 1
1 0 0 1 0
0 0 1 0 0
0 1 0 0 0
0 0 0 1 1
0 0 1 1 1
0 1 1 1 1
1 1 1 1 0
Tabla 2: Contenido de los registros del generador 𝑷𝑵 del ejemplo. La secuencia resultante en este caso es 𝟏 𝟏 𝟏 𝟏 𝟎 𝟏 𝟎 𝟏 𝟏 𝟎 𝟎 𝟏 𝟎 𝟎 𝟎.
De manera similar para este mismo circuito si se realiza la suma de la salida de dos registros diferentes se puede obtener una secuencia 𝑠𝑒𝑢𝑑𝑜𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 diferente, lo cual se muestra en la ilustración 8 y la tabla 3.
Ilustración 8: Una variante del generador 𝑷𝑵 previo.
Reg. 1 Reg. 2 Reg. 3 Reg. 4 Realimentación
1 1 1 1 0
1 1 1 0 0
1 1 0 0 0
1 0 0 0 1
0 0 0 1 0
0 0 1 0 0
0 1 0 0 1
1 0 0 1 1
0 0 1 1 0
0 1 1 0 1
1 1 0 1 0
1 0 1 0 1
0 1 0 1 1
1 0 1 1 1
0 1 1 1 1
1 1 1 1 0
//
Ilustración 9: Simulación del generador 𝑷𝑵 del ejemplo usando 𝑺𝒊𝒎𝒖𝒍𝒊𝒏𝒌
Ilustración 10: Resultados de la simulación del diagrama de la ilustración 8.
Para estas secuencias se tiene:
𝑹𝒄(𝒎) = { 𝑳, 𝒎 = 𝟎 −𝟏, 𝟏 ≤ 𝒎 ≤ 𝑳 − 𝟏
de vista práctico no introduce consecuencias. Por ello, estas secuencias son muy próximas a las secuencia 𝑷𝑵 ideales al menos desde el punto de vista de sus funciones de auto correlación.
En aplicaciones de antibloqueo con señales de espectro disperso el periodo de la secuencia 𝑷𝑵 debe ser largo para prevenir que el bloqueador aprenda las conexiones de realimentación de la secuencia 𝑷𝑵 observando la señal recibida. Sin embargo, este requerimiento es impráctico en muchos casos porque, debido a la propiedad de linealidad de las secuencias 𝑷𝑵, la bloqueadora puede determinar las conexiones de realimentación observando solo 𝟐 ∗ 𝒎 𝒄𝒉𝒊𝒑𝒔 de la secuencia 𝑷𝑵.
Para reducir esta vulnerabilidad en relación a la bloqueadora las secuencia de salida de varias etapas del registro de desplazamiento o las salidas de varias secuencias 𝒎 distintas se combinan en forma no lineal para producir una secuencia que es considerablemente más difícil de aprender por parte de la bloqueadora.
Reducciones adicionales de la vulnerabilidad se logran cambiando frecuentemente las conexiones de realimentación y/o el número de etapas del registro de desplazamiento de acuerdo a algún plan prestablecido entre el transmisor y el receptor.
En algunas aplicaciones las propiedades de correlación cruzada de las secuencias 𝑷𝑵 son tan importantes como las propiedades de auto correlación.
Por ejemplo en 𝑪𝑫𝑴𝑨 cada usuario tiene asignada una secuencia 𝑷𝑵 particular. Idealmente las secuencias 𝑷𝑵 entre usuarios deberían ser mutuamente no correlacionadas tal que el nivel de interferencia experimentado por un usuario debido a las transmisiones de otros usuarios pueda sumarse con base en potencias. Sin embargo las secuencias 𝑷𝑵 utilizadas en la práctica por diferentes usuarios exhiben alguna correlación.
Secuencias 𝒎 Secuencias 𝑮𝒐𝒍𝒅
𝒎 𝑳
= 𝟐𝒎− 𝟏 Núm. 𝑹𝒎𝒂𝒙(𝒑𝒊𝒄𝒐)
𝑹𝒎𝒂𝒙(𝒑𝒊𝒄𝒐) 𝑹(𝟎) 𝑹𝒎𝒂𝒙(𝒑𝒊𝒄𝒐) 𝑹𝒎𝒂𝒙(𝒑𝒊𝒄𝒐) 𝑹(𝟎) 𝟑 𝟕 𝟐 𝟓 𝟎. 𝟕𝟏 𝟓 𝟎. 𝟕𝟏 𝟒 𝟏𝟓 𝟐 𝟗 𝟎. 𝟔𝟎 𝟗 𝟎. 𝟔𝟎 𝟓 𝟑𝟏 𝟔 𝟏𝟏 𝟎. 𝟑𝟓 𝟗 𝟎. 𝟐𝟗 𝟔 𝟔𝟑 𝟔 𝟐𝟑 𝟎. 𝟑𝟔 𝟏𝟕 𝟎. 𝟐𝟕 𝟕 𝟏𝟐𝟕 𝟏𝟖 𝟒𝟏 𝟎. 𝟑𝟐 𝟏𝟕 𝟎. 𝟏𝟑 𝟖 𝟐𝟓𝟓 𝟏𝟔 𝟗𝟓 𝟎. 𝟑𝟕 𝟑𝟑 𝟎. 𝟏𝟑 𝟗 𝟓𝟏𝟏 𝟒𝟖 𝟏𝟏𝟑 𝟎. 𝟐𝟐 𝟑𝟑 𝟎. 𝟎𝟔 𝟏𝟎 𝟏𝟎𝟐𝟑 𝟔𝟎 𝟑𝟖𝟑 𝟎. 𝟑𝟕 𝟔𝟓 𝟎. 𝟎𝟔 𝟏𝟏 𝟐𝟎𝟒𝟕 𝟏𝟕𝟔 𝟐𝟖𝟕 𝟎. 𝟏𝟒 𝟔𝟓 𝟎. 𝟎𝟑 𝟏𝟐 𝟒𝟎𝟗𝟓 𝟏𝟒𝟒 𝟏𝟒𝟎𝟕 𝟎. 𝟑𝟒 𝟏𝟐𝟗 𝟎. 𝟎𝟑
correlación. En consecuencia, las secuencias 𝒎 no son adecuadas para los sistemas de comunicación 𝑪𝑫𝑴𝑨. Si bien es posible seleccionar un subconjunto pequeño de secuencias 𝒎 que tengan valores pico 𝑹𝒎𝒂𝒙 de correlación cruzada menores, el número de secuencias en ese subconjunto es usualmente muy pequeño para aplicaciones de 𝑪𝑫𝑴𝑨.
Algunos métodos han sido desarrollados por 𝑮𝒐𝒍𝒅 y por 𝑲𝒂𝒔𝒂𝒎𝒊 para generar secuencias 𝑷𝑵 con mejores propiedades de correlación cruzada que las secuencias 𝒎.
Las secuencias 𝑮𝒐𝒍𝒅 se construyen tomando un par de secuencias 𝒎 especialmente seleccionadas, denominadas secuencias 𝒎 preferidas y formando una suma 𝒎ó𝒅𝒖𝒍𝒐 𝟐 de las dos secuencias, para cada una de las 𝑳 versiones desplazadas cíclicamente de una secuencia relativa a la otra, tal como se muestra en la ilustración 11.
Ilustración 11: Generador de secuencias 𝑮𝒐𝒍𝒅 de longitud 31
Para 𝒎 𝒊𝒎𝒑𝒂𝒓, el valor máximo de la función correlación cruzada entre cualquier par de secuencias 𝑮𝒐𝒍𝒅 es 𝑹𝒎𝒂𝒙 = √𝟐𝑳 y para 𝒎 𝒑𝒂𝒓 𝑹𝒎𝒂𝒙 = √𝑳.
Este método de construcción produce un conjunto menor de secuencias 𝒎 comparado con las secuencias 𝑮𝒐𝒍𝒅, pero su valor de correlación cruzada máxima es 𝑹𝒎𝒂𝒙= √𝑳.
Es interesante comparar el valor pico de la función de correlación cruzada para secuencias 𝑮𝒐𝒍𝒅 y para secuencias 𝑲𝒂𝒔𝒂𝒎𝒊 con una cota inferior para la máxima correlación cruzada entre cualquier par de secuencias binarias de longitud 𝑳. Dado un conjunto de 𝑵 secuencias de periodo 𝑳, una cota inferior sobre una correlación cruzada máxima es
𝑹𝒎𝒂𝒙 ≥ 𝑳√
𝑵 − 𝟏 𝑵𝑳 − 𝟏
La cual para valores grandes de 𝑳 𝒚 𝑵, es aproximadamente similar a 𝑹𝒎𝒂𝒙 ≥ √𝑳
Por lo tanto las secuencias 𝑲𝒂𝒔𝒂𝒎𝒊 satisfacen esta cota inferior y son óptimas. Las secuencias 𝑮𝒐𝒍𝒅 son sub óptimas en este sentido porque 𝑹𝒎𝒂𝒙 = √𝟐𝑳. En 𝑠𝑖𝑚𝑢𝑙𝑖𝑛𝑘 se tienen disponibles los bloques que permiten simular los generadores de secuencias 𝑮𝒐𝒍𝒅 y𝑲𝒂𝒔𝒂𝒎𝒊.
2.5.Espectro disperso por secuencia directa (𝑫𝑺𝑺𝑺): 2.5.1. Generalidades
Ilustración 12: Sistema de espectro disperso por secuencia directa. (𝒂) Transmisor de secuencia directa usando 𝑩𝑷𝑺𝑲. (𝒃)Transmisor de secuencia
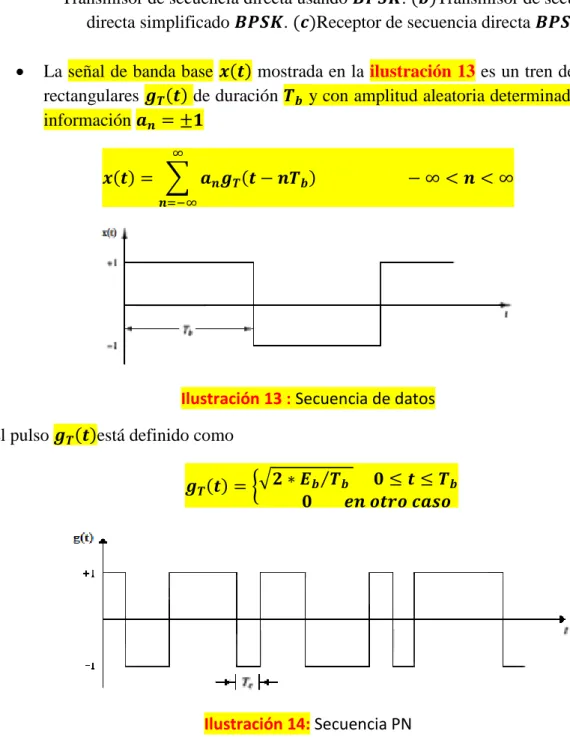
directa simplificado 𝑩𝑷𝑺𝑲. (𝒄)Receptor de secuencia directa 𝑩𝑷𝑺𝑲. La señal de banda base 𝒙(𝒕) mostrada en la ilustración 13 es un tren de pulsos
rectangulares 𝒈𝑻(𝒕) de duración 𝑻𝒃 y con amplitud aleatoria determinada por la información 𝒂𝒏 = ±𝟏
𝒙(𝒕) = ∑ 𝒂𝒏𝒈𝑻(𝒕 − 𝒏𝑻𝒃) ∞
𝒏=−∞
− ∞ < 𝒏 < ∞
Ilustración 13 : Secuencia de datos
El pulso 𝒈𝑻(𝒕)está definido como
𝒈𝑻(𝒕) = {√𝟐 ∗ 𝑬𝒃⁄𝑻𝒃 𝟎 ≤ 𝒕 ≤ 𝑻𝒃 𝟎 𝒆𝒏 𝒐𝒕𝒓𝒐 𝒄𝒂𝒔𝒐
La salida del generador 𝑷𝑵𝒈(𝒕), mostrada en lailustración 14 también consiste en un tren de pulsos rectangulares 𝒑(𝒕) de amplitud aleatoria {𝒄𝒏} = ±𝟏 y duración 𝑻𝒄.
𝒈(𝒕) = ∑ 𝒄𝒏𝒑(𝒕 − 𝒏𝑻𝒄) ∞
𝒏=−∞
El pulso rectangular de la señal 𝑷𝑵 usualmente se denomina señal chip y su duración 𝑻𝒄 se denomina intervalo de chip. El inverso del tiempo de chip se denomina velocidad de transmisión en 𝒄𝒉𝒊𝒑𝒔/𝒔 y corresponde aproximadamente al ancho de banda 𝑾 de la señal transmitida.
La relación entre el intervalo de bit y el intervalo de chip se escoge usualmente como un número entero y se denomina ganancia de procesamiento:
𝑳𝒄 = 𝑻𝒃 𝑻𝒄
La secuencia {𝒄𝒏} cumple las siguientes propiedades:
Cada chip es +𝟏 𝒐 − 𝟏 con igual probabilidad. En estas condiciones 𝑬{𝒄𝒏} = 𝟎 Los chips de la secuencia 𝑷𝑵 son no correlacionados, o sea,
𝑬{𝒄𝒏𝒄𝒎} = ∑ ∑ 𝒄𝒏𝒄𝒎𝑷𝒏𝒎 𝟐 𝒎=𝟏 𝟐 𝒏=𝟏 = ∑ ∑ 𝒄𝒏𝒄𝒎𝑷𝒏𝑷𝒎 𝟐 𝒎=𝟏 𝟐 𝒏=𝟏 = 𝑬{𝒄𝒏}𝑬{𝒄𝒎} = 𝟎 𝒏 ≠ 𝒎 Además, 𝑬{𝒄𝒏𝟐} = ∑ 𝒄𝒏𝟐𝑷𝒏 𝟐 𝒏=𝟏 = (−𝟏)𝟐∗𝟏 𝟐+ (+𝟏) 𝟐∗𝟏 𝟐 = 𝟏 𝒑𝒂𝒓𝒂 𝒏 = 𝒎
Y por tanto
E[𝒄𝒏𝒄𝒎] = 𝜹𝒎𝒏
Ilustración 15: Secuencia producto (𝑫𝑺𝑺𝑺 de banda base)
Si en la modulación se usa 𝑩𝑷𝑺𝑲 binaria y se transmiten 𝑹 𝒃𝒊𝒕/𝒔, el ancho de banda necesario será 𝑹 𝑯𝒛. Si se tiene un ancho de banda disponible de 𝑩𝒄 𝐇𝐳 con 𝑩𝒄 ≫ 𝑹, este se puede utilizar completamente cambiando la fase a una rata 𝑾 = 𝑩𝒄 de acuerdo al patrón del generador 𝑷𝑵, como se muestra en las ilustraciones 12 a 15. El producto del tren de datos 𝒙(𝒕)por la secuencia 𝑠𝑒𝑢𝑑𝑜𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 𝒈(𝒕) sirve para dispersar el ancho de banda, como se muestra en la ilustración 16.
La señal producto de banda base modula la portadora sinusoidal 𝑨𝒄∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕):
∅𝑫𝑺𝑺𝑺(𝒕) = 𝑨𝒄∗ 𝒙(𝒕) ∗ 𝒈(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕) = 𝑨𝒄∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝜽(𝒕))
En donde
𝜽(𝒕) = {𝟎 𝒔𝒊 𝒙(𝒕) ∗ 𝒈(𝒕) = 𝟏 𝝅 𝒔𝒊 𝒙(𝒕) ∗ 𝒈(𝒕) = −𝟏
La ilustración 17 muestra las distintas formas de onda tanto en el transmisor como en el receptor de 𝑫𝑺𝑺𝑺.
Ilustración 17: Ejemplo de dispersión de espectro usando secuencia directa. (𝒂) Forma de onda de los datos binarios a ser transmitidos. (𝒃)Secuencia 𝑷𝑵. (𝒄)Secuencia transmitida. (𝒅)Fase de la portadora transmitida. (𝒆)Desplazamiento de fase producido
por el código 𝑷𝑵 del receptor. (𝒇)Fase de la portadora recibida después del desplazamiento de fase producido por el código 𝑷𝑵 del receptor. (𝒈)Forma de onda de
Ilustración 18: Demodulación 𝑫𝑺𝑺𝑺
Luego del producto de la señal recibida con la secuencia 𝑷𝑵 del receptor, suponiendo que haya sincronismo de esta con la secuencia 𝑷𝑵 del transmisor, se tiene:
𝑨𝒄∗ 𝒙(𝒕) ∗ 𝒈𝟐(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇
𝒄∗ 𝒕) = 𝑨𝒄∗ 𝒙(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕)
Dado que 𝒈𝟐(𝒕) = 𝟏 𝐩𝐚𝐫𝐚 𝐭𝐨𝐝𝐨 𝒕.
La señal resultante es una señal 𝑩𝑷𝑺𝑲 que ocupa un ancho de banda aproximado de 𝑹 𝑯𝒛, igual al de la señal que transporta la información y por lo tanto el único ruido que corrompe la señal en el demodulador es el ruido que cae dentro de este ancho de banda. El demodulador para la señal 𝑩𝑷𝑺𝑲 obtenida, es el correlador convencional o un filtro acoplado.
2.5.2. Probabilidad de error de 𝑫𝑺𝑺𝑺
2.5.2.1. Generalidades
Para el análisis de la probabilidad de error de la modulación 𝑫𝑺𝑺𝑺 se supone que esta utiliza 𝑩𝑷𝑺𝑲. Dentro de un intervalo de bit se transmite la señal
𝒔(𝒕) = 𝒂𝟎∗ 𝒈𝑻(𝒕) ∗ 𝒈(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄 ∗ 𝒕) 𝟎 ≤ 𝒕 ≤ 𝑻𝒃
Donde 𝒂𝟎 = ±𝟏 .
La señal recibida se supone corrompida por una señal interferente 𝒊(𝒕). En consecuencia, 𝒓(𝒕) = 𝒂𝟎∗ 𝒈𝑻(𝒕 − 𝒕𝒅) ∗ 𝒈(𝒕 − 𝒕𝒅) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝝋) + 𝒊(𝒕)
Donde 𝒕𝒅 representa el retardo de propagación a través del canal y 𝝋 representa el desplazamiento de fase de la portadora. Suponiendo que el receptor está sincronizado en cuanto a la secuencia 𝑠𝑒𝑢𝑑𝑜𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎, se puede hacer 𝒕𝒅 = 𝟎. Se supone que también hay sincronismo de fase, lo cual se logra con un sistema basado en un 𝑷𝑳𝑳.
En el instante de tiempo 𝒕 = 𝑻𝒃, se tiene
𝒚(𝑻𝒃) = 𝑬𝒃+ 𝒚𝒊(𝑻𝒃)
𝒚𝒊(𝑻𝒃) = ∫ 𝒈(𝒕) ∗ 𝒊(𝒕) ∗ 𝒈𝑻(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄 ∗ 𝒕 + 𝝋) 𝒅𝒕 𝑻𝒃 𝟎 = ∑ 𝒄𝒏∗ ∫ 𝒑(𝒕 − 𝒏 ∗ 𝑻𝒄) ∗ 𝑻𝒃 𝟎 𝑳𝒄−𝟏 𝒏=𝟎 𝒊(𝒕) ∗ 𝒈𝑻(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝝋) 𝒅𝒕
En donde 𝑳𝒄 es el número de chips en un tiempo de bit. 𝒚𝒊(𝑻𝒃) = √
𝟐𝑬𝒃
𝑻𝒃 ∗ ∑ 𝒄𝒏∗ 𝒗𝒏 𝑳𝒄−𝟏
𝒏=𝟎 (9.2)
Donde, por definición
𝒗𝒏 = ∫𝒏𝑻(𝒏+𝟏)𝑻𝒄𝒊(𝒕) ∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄 ∗ 𝒕 + 𝝋) 𝒅𝒕
𝒄 (9.3)
El valor medio de 𝒚𝒊(𝑻𝒃) está dado por:
𝑬{𝒚𝒊(𝑻𝒃)} = 𝑬 {√ 𝟐𝑬𝒃 𝑻𝒃 ∗ ∑ 𝒄𝒏∗ 𝒗𝒏 𝑳𝒄−𝟏 𝒏=𝟎 } = √𝟐𝑬𝒃 𝑻𝒃 ∗ ∑ 𝑬{𝒄𝒏} ∗ 𝑬{𝒗𝒏} 𝑳𝒄−𝟏 𝒏=𝟎 = 𝟎
Su variancia es:
𝑬[𝒚𝒊𝟐(𝑻𝒃)] = 𝟐𝑬𝒃 𝑻𝒃 𝑬 [ ∑ ∑ 𝒄𝒏𝒄𝒎𝒗𝒏𝒗𝒎 𝑳𝒄−𝟏 𝒎=𝟎 𝑳𝒄−𝟏 𝒏=𝟎 ] =𝟐𝑬𝒃 𝑻𝒃 ∑ ∑ 𝑬[𝒄𝒏𝒄𝒎𝒗𝒏𝒗𝒎] = 𝟐𝑬𝒃 𝑻𝒃 ∑ ∑ 𝑬{𝒄𝒏𝒄𝒎}𝑬{𝒗𝒏𝒗𝒎} 𝑳𝒄−𝟏 𝒎=𝟎 𝑳𝒄−𝟏 𝒏=𝟎 𝑳𝒄−𝟏 𝒎=𝟎 𝑳𝒄−𝟏 𝒏=𝟎
Pero como E[𝒄𝒏𝒄𝒎] = 𝜹𝒎𝒏 se tiene que 𝑬[𝒚𝒊𝟐(𝑻𝒃)] =𝟐𝑬𝒃 𝑻𝒃 ∑ 𝑬[𝒗𝒏 𝟐] 𝑳𝒄−𝟏 𝒏=𝟎 =𝟐𝑬𝒃 𝑻𝒃 𝑳𝒄𝑬[𝒗 𝟐] (𝟗. 𝟒)
Este valor cuadrático del ruido a la salida del correlador dependerá de la forma que tenga la interferencia. A continuación se analiza el efecto en este valor de tres tipos de interferencia diferentes:
Interferencia de banda estrecha sinusoidal Interferencia de banda ancha
= 𝑨𝑱∗ 𝒄𝒐𝒔(𝟐𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝜽𝑱)
Donde 𝒇𝒄 está dentro del ancho de banda de la señal 𝑫𝑺𝑺𝑺 transmitida. La señal recibida con ruido de banda estrecha 𝒊(𝒕)tendrá la forma:
𝒓(𝒕) = 𝑨𝒄∗ 𝒙(𝒕) ∗ 𝒈(𝒕) ∗ 𝒄𝒐𝒔(𝟐𝝅 ∗ 𝒇𝒄∗ 𝒕) + 𝒊(𝒕)
La operación inversa de dispersión, luego del producto por la secuencia dispersante en el receptor produce:
𝒓(𝒕) ∗ 𝒈(𝒕) = 𝑨𝒄∗ 𝒙(𝒕) ∗ 𝒄𝒐𝒔(𝟐𝝅 ∗ 𝒇𝒄∗ 𝒕) + 𝒊(𝒕) ∗ 𝒈(𝒕)
En donde el segundo término de la derecha produce una dispersión del espectro de ruido a un ancho de banda de 𝑾 𝑯𝒛.
La señal resultante del producto de la interferencia con la señal dispersante es de banda ancha con densidad espectral de potencia
𝑱𝟎= 𝑷𝑱⁄ 𝑾 = 𝑨𝑱𝟐⁄(𝟐 ∗ 𝑾)
Como la señal deseada se desmodula mediante un filtro acoplado de ancho de banda 𝑹, la potencia de la interferencia a la salida es
𝑵 = 𝑱𝟎∗ 𝑹 = (𝑷𝑱∗ 𝑹) 𝑾⁄ = 𝑷𝑱⁄(𝑾 𝑹⁄ ) = 𝑷𝑱⁄(𝑻𝒃⁄𝑻𝒄)
= 𝑷𝑱 𝑳⁄ 𝒄
Suponiendo que el ángulo de fase de la interferencia, 𝜽𝒋 , está uniformemente distribuida en el intervalo (𝟎, 𝟐𝝅) se tiene
𝒗𝒏 = ∫ √𝟐𝑷𝑱 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 ∗ 𝒄𝒐𝒔(𝟐𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝜽𝑱) ∗ 𝒄𝒐𝒔(𝟐𝝅 ∗ 𝒇𝒄∗ 𝒕 + ∅) 𝒅𝒕 = (√𝟐𝑷𝑱⁄ ) ∫𝟐 𝒄𝒐𝒔(𝜽𝑱− ∅) (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 𝒅𝒕 = (𝑻𝒄√𝟐𝑷𝑱⁄ ) ∗ 𝒄𝒐𝒔(𝜽𝟐 𝑱 − ∅)
Se tiene entonces que 𝒗𝒏 es también aleatoria con valor medio
𝑬[𝒗𝒏] = (𝑻𝒄√𝟐𝑷𝑱⁄ ) ∫𝟐 𝟏 𝟐𝝅 𝟐𝝅 𝟎 ∗ 𝒄𝒐𝒔(𝜽𝑱− ∅) 𝒅𝜽𝑱 = 𝟎
Y valor cuadrático medio
𝑬[𝒗𝒏𝟐 ] = (𝑻𝒄𝟐∗ 𝑷𝑱⁄ ) ∫ (𝟏 𝟐𝝅𝟐 ⁄ ) ∗ 𝒄𝒐𝒔𝟐(𝜽𝑱− ∅) 𝟐𝝅
𝟎
𝒅𝜽𝑱
= (𝑻𝒄𝟐∗ 𝑷𝑱) 𝟒⁄
Sustituyendo este valor en (𝟗. 𝟒)
𝑬[𝒚𝒊𝟐(𝑻𝒃)] = (𝟐 ∗ 𝑬𝒃⁄𝑻𝒃) ∑ 𝑬[𝒗𝒏𝟐] 𝑳𝒄−𝟏 𝒏=𝟎 = (𝟐 ∗ 𝑬𝒃⁄𝑻𝒃) ∗ 𝑳𝒄∗ 𝑬[𝒗𝟐] (𝟗. 𝟒) Se tiene 𝑬[𝒚𝒊𝟐(𝑻𝒃)] = (𝑬𝒃∗ 𝑷𝑱∗ 𝑻𝒄) 𝟐⁄
La relación señal a ruido a la salida del detector: (𝑺𝑵𝑹)𝑫= 𝑬[𝒚(𝑻𝒃)]𝟐 𝑬[𝒚 𝒊 𝟐(𝑻 𝒃)] ⁄ = 𝑬𝒃𝟐⁄(𝑬𝒃∗ 𝑷𝑱∗ 𝑻𝒄/𝟐) = 𝟐 ∗ 𝑬𝒃⁄(𝑷𝑱∗ 𝑻𝒄) (𝟗. 𝟓)
Sustituyendo en (9.5)
𝑬𝒃= 𝑷𝒔∗ 𝑻𝒃
Con 𝑱𝟎 la densidad espectral de una interferencia equivalente en un ancho de banda W, se obtiene
(𝑺𝑵𝑹)𝑫= (𝟐 ∗ 𝑬𝒃) 𝑱⁄ 𝟎
Lo que significa que la interferencia sinusoidal se ha dispersado en el ancho de banda 𝑾 convirtiéndose en un ruido equivalente espectralmente plano con densidad espectral 𝑱𝟎.
Ejemplo:
La 𝑺𝑵𝑹 requerida en el detector (o sea a la salida del filtro acoplado en donde se toma la decisión) para lograr una comunicación confiable en un sistema de comunicaciones de espectro disperso es de 𝟏𝟑 𝒅𝑩. Si la relación de la potencia de la bloqueadora a la potencia de señal en el receptor es de 𝟐𝟎 𝒅𝑩, determinar la ganancia de procesamiento requerida para lograr una comunicación confiable.
Se tiene que (𝑷𝑱⁄𝑷𝒔)
𝒅𝑩 = 𝟐𝟎 𝒅𝑩 , esto equivale a que (𝑷𝑱⁄𝑷𝒔) = 𝟏𝟎𝟎.
También se tiene que (𝑺𝑵𝑹)𝑫,𝒅𝑩= 𝟏𝟑 𝒅𝑩, o lo que es lo mismo (𝑺𝑵𝑹)𝑫= 𝟐𝟎. Puede usarse (𝟗. 𝟔) para obtener 𝑳𝒄, tal que
𝑳𝒄 = 𝟏 𝟐⁄ ∗ (𝑷𝑱⁄𝑷𝒔) ∗ (𝑺𝑵𝑹)𝑫 = 𝟏𝟎𝟎𝟎
En consecuencia, la ganancia de procesamiento requerida es 𝟑𝟎 𝒅𝑩.
2.5.2.3. Efectos de la operación inversa de dispersión sobre una interferencia de banda ancha:
Dado que la señal recibida 𝒓(𝒕) es la salida de un filtro pasa banda ideal en la entrada del receptor, la interferencia 𝒊(𝒕) es también una señal pasa banda y puede representarse como
𝒗𝒏 = ∫ [𝒊𝒄(𝒕)𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕) − 𝒊𝒔(𝒕) ∗ 𝒔𝒊𝒏(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕)] (𝒏+𝟏)𝑻𝒄
𝒏𝑻𝒄
∗ 𝒄𝒐𝒔(𝟐 ∗ 𝝅 ∗ 𝒇𝒄∗ 𝒕 + 𝝋) 𝒅𝒕
Donde 𝒊𝒄(𝒕) e 𝒊𝒔(𝒕) son las componentes en fase y cuadratura, respectivamente. Se puede considerar la interferencia 𝒊(𝒕) como un proceso estocástico de banda ancha, con densidad espectral plana en el ancho de banda 𝑾 como se muestra en la ilustración 19.
Ilustración 19: DEP de una interferencia de banda ancha La potencia de esta señal es
𝑷𝑱 = ∫ 𝑺𝒊𝒊(𝒇)𝒅𝒇 ∞
−∞
Para evaluar 𝑬{𝒗𝟐} se usan (𝟗. 𝟏) 𝒚 (𝟗. 𝟑). Despreciando los términos armónicos de 𝒇𝒄
𝒗𝒏 = 𝟏 𝟐𝒄𝒐𝒔(𝝋) ∫ 𝒊𝒄(𝒕)𝒅𝒕 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 +𝟏 𝟐𝒔𝒆𝒏(𝝋) ∫ 𝒊𝒔(𝒕)𝒅𝒕 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 𝑬(𝒗𝒏𝟐) =𝟏 𝟒𝒄𝒐𝒔 𝟐(𝝋)𝑬 {∫ 𝒊 𝒄(𝒕𝟏)𝒅𝒕𝟏 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 ∫ 𝒊𝒄(𝒕𝟐)𝒅𝒕𝟐 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 } +𝟏 𝟒𝒔𝒊𝒏 𝟐(𝝋)𝑬 {∫ 𝒊 𝒔(𝒕𝟏)𝒅𝒕𝟏 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 ∫ 𝒊𝒔(𝒕𝟐)𝒅𝒕𝟐 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 } =𝟏 𝟐∫ ∫ 𝑬{𝒊𝒄(𝒕𝟏)𝒊𝒄(𝒕𝟐)}𝒅𝒕𝟏𝒅𝒕𝟐 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 = =𝟏 𝟐∫ ∫ 𝑬{𝒊𝒔(𝒕𝟏)𝒊𝒔(𝒕𝟐)}𝒅𝒕𝟏𝒅𝒕𝟐 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄 (𝒏+𝟏)𝑻𝒄 𝒏𝑻𝒄
En donde se ha supuesto que:
las dos componentes de ruido son no correlacionadas (𝑬{𝒊𝒄(𝒕)} = 𝑬{𝒊𝒔(𝒕)} = 𝟎) y
Ilustración 20: Región de integración de la función de auto correlación 𝑹𝒄𝒄(𝒕𝟏, 𝒕𝟐)
𝑬{𝒗𝟐} = (𝟏 𝟐⁄ ) ∫ (𝑻
𝒄 − |𝝉|)𝑹𝒊𝒄(𝝉)𝒅𝝉 𝑻𝒄
−𝑻𝒄
= (𝑱𝟎𝑾𝑻𝒄⁄ ) ∫ (𝟏 − |𝝉| 𝑻𝟒 ⁄ 𝒄)𝑺𝒂(𝝅 ∗ 𝑾 ∗ 𝝉)𝒅𝝉 𝑻𝒄
−𝑻𝒄
= (𝑷𝑱𝑻𝒄⁄ ) ∫ (𝟏 − |𝝉| 𝑻𝟒 ⁄ 𝒄) 𝑻𝒄
−𝑻𝒄
𝑺𝒂(𝝅 𝑾 𝝉)𝒅𝝉 (𝟗. 𝟖)
Dado que 𝑻𝒄 ≅ 𝜶 𝑾,⁄ 𝜶 ≥ 𝟏 la integral se puede expresar como
𝑰(𝜶) = 𝟐 ∗ ∫ (𝟏 − 𝒙 𝜶𝟎𝜶 ⁄ ) ∗ 𝒔𝒊𝒏(𝝅 ∗ 𝒙) 𝒙 ⁄ 𝒅𝒙 (9.9)
Ilustración 21: gráfico de la función 𝑰(𝜶)
De (𝟗. 𝟒), (𝟗. 𝟖) 𝒚 (𝟗. 𝟗) se tiene
𝑬[𝒚𝒊𝟐(𝑻𝒃)] = ((𝑬𝒃𝑷𝑱𝑻𝒄) 𝟐⁄ )𝑰(𝜶)
De esta forma, la 𝑺𝑵𝑹 en el detector es:
(𝑺𝑵𝑹)𝑫= 𝟐𝑬𝒃⁄(𝑱𝟎𝑰(𝜶)) (𝟗. 𝟏𝟎)
Si comparamos (𝟗. 𝟕) con (𝟗. 𝟏𝟎) es posible notar que la 𝑺𝑵𝑹 para el caso de interferencia de banda ancha es mayor debido al factor 𝑰(𝜶) . De esta forma, la interferencia sinusoidal resulta en una degradación mayor en el desempeño del sistema de espectro disperso 𝑫𝑺𝑺𝑺.
En los dos casos de interferencia (de banda estrecha o de banda ancha) si se conoce la 𝑺𝑵𝑹 se puede calcular la probabilidad de error dado que se puede suponer que 𝒚𝒊(𝒕𝒃) es gaussiana debido al teorema del límite central ya que esta función consiste de 𝑳𝒄 variables aleatorias no correlacionadas y 𝑳𝒄 es usualmente grande:
𝑷𝟐= 𝑸 [√𝟐𝑬𝒃⁄ ]𝑱𝟎
Con 𝑱𝟎 la densidad espectral de potencia de una interferencia de banda estrecha equivalente. Para el segundo caso la expresión es similar con una 𝑺𝑵𝑹 incrementada en un factor 𝑰(𝜶).
2.5.2.4. Resistencia al bloqueo intencional
= 𝜶𝑸 (√(𝟐𝜶𝑾/𝑹) (𝑷⁄ 𝑱/𝑷𝒔)) (𝟗. 𝟏𝟑)
La bloqueadora selecciona el ciclo 𝜶 para maximizar la probabilidad de error. Derivando (𝟗. 𝟏𝟑) con respecto a 𝜶 es posible hallar que la bloqueadora de peor caso ocurre cuando
∝∗= { 𝟎. 𝟕𝟏 (𝑬⁄ 𝒃/𝑱𝟎) 𝑬𝒃⁄𝑱𝟎≥ 𝟎. 𝟕𝟏 𝟏 𝑬𝒃⁄𝑱𝟎< 𝟎. 𝟕𝟏
Y la probabilidad de error correspondiente
𝑷𝟐 = {
𝟎. 𝟎𝟖𝟐 (𝑬⁄ 𝒃/𝑱𝟎) = (𝟎. 𝟎𝟖𝟐𝑷𝑱/𝑷𝒔) (𝑾/𝑹)⁄ 𝑬𝒃⁄𝑱𝟎≥ 𝟎. 𝟕𝟏
𝑸 (√𝟐𝑬𝒃⁄ ) = 𝑸 (√𝟐(𝑾/𝑹) (𝑷𝑱𝟎 ⁄ 𝑱/𝑷𝒔)) 𝑬𝒃⁄𝑱𝟎< 𝟎. 𝟕𝟏
Cuando se compara la probabilidad de error para una bloqueadora continua de banda ancha gaussiana (𝜶 = 𝟏)con el peor caso de bloqueadora pulsada (ver ilustración 22) es posible hallar una gran diferencia en el desempeño (𝟒𝟎 𝒅𝑩 aproximadamente para una probabilidad de error de 𝟏𝟎−𝟔), lo cual es un gran problema. Sin embargo debe tenerse en cuenta que es difícil que una bloqueadora tenga un 𝜶 pequeño y picos de potencia altos. Sin embargo es evidente que 𝑫𝑺𝑺𝑺 en presencia de una bloqueadora pulsada tiene desempeño pobre.
Si se agrega codificación se mejora el desempeño en 𝑺𝑵𝑹 en la ganancia de codificación que es normalmente menor a 𝟏𝟎 𝒅𝑩. Esto no es una mejora significativa y se debe a que la duración de la señal bloqueadora puede estar seleccionada para afectar varios bits codificados y por lo tanto la probabilidad de error de palabra de código es alta debido a las características de ráfaga de la bloqueadora.
Una mejora posible es utilizar entremezclado (𝑖𝑛𝑡𝑒𝑟𝑙𝑒𝑎𝑣𝑖𝑛𝑔) de los bits codificados previamente a la transmisión sobre el canal. El objetivo de hacer esto es lograr que los bits codificados afectados sean estadísticamente independientes de la bloqueadora. Ver la ilustración 23 para un sistema que utiliza codificación y entremezclado. Mediante la utilización de un entre mezclador suficientemente largo tal que las características de ráfaga sean eliminadas, la penalidad en desempeño debido al bloqueo se reduce significativamente (𝟑 𝒂 𝟓 𝒅𝑩 para códigos convolucionales o de bloques)
Ilustración 23: sistema de comunicaciones antibloqueo
2.5.3. Margen de Bloqueo:
Cuando la señal interferente es una señal bloqueadora, es posible expresar 𝜺𝒃⁄𝑱𝟎 como: 𝑬𝒃⁄𝑱𝟎= (𝑷𝒔𝑻𝒃) (𝑷⁄ 𝑱/𝑾)
= (𝑷𝒔/𝑹) (𝑷⁄ 𝑱/𝑾) = (𝑾/𝑹) (𝑷⁄ 𝑱/𝑷𝒔)
Si se especifica 𝑬𝒃⁄𝑱𝟎para lograr un desempeño deseado, entonces la ecuación anterior se puede expresar como
𝟏𝟎 ∗ 𝐥𝐨𝐠(𝑷𝒋⁄𝑷𝒔) = 𝟏𝟎 ∗ 𝐥𝐨𝐠(𝑾/𝑹) − 𝟏𝟎 ∗ 𝐥𝐨 𝐠(𝑬𝒃⁄ )𝑱𝟎
(𝑷𝒋⁄𝑷𝒔)
𝒅𝑩= (𝑾/𝑹)𝒅𝑩− (𝑬𝒃⁄ )𝑱𝟎 𝒅𝑩 (𝟗. 𝟏𝟏)
2.5.4. Desempeño de señales de espectro disperso codificadas:
La 𝑺𝑵𝑹 aumenta a la salida de un decodificador con decisión suave en proporción a la ganancia de codificación, definida así:
𝒈𝒂𝒏𝒂𝒏𝒄𝒊𝒂 𝒅𝒆 𝒄𝒐𝒅𝒊𝒇𝒊𝒄𝒂𝒄𝒊ó𝒏 = 𝑹𝒄∗ 𝒅𝒎𝒊𝒏𝑯
Donde 𝑹𝒄 es la tasa de codificación y 𝒅𝒎𝒊𝒏𝑯 es la 𝒅𝒊𝒔𝒕𝒂𝒏𝒄𝒊𝒂 𝒎í𝒏𝒊𝒎𝒂 𝒅𝒆 𝑯𝒂𝒎𝒎𝒊𝒏𝒈 del código. En consecuencia, el efecto de la codificación es incrementar el margen de bloqueo por la ganancia de codificación. Por tanto (𝟗. 𝟏𝟏) se modifica así:
(𝑷𝒋⁄𝑷𝒔)𝒅𝑩= (𝑾/𝑹)𝒅𝑩+ (𝑮𝑪)𝒅𝑩− (𝑬𝒃⁄ )𝑱𝟎 𝒅𝑩 (𝟗. 𝟏𝟐)
Decodificación por decisión suave y decisión dura
Considere un sencillo codificador de paridad par como el de la Tabla siguiente: Bit de
entrada 1
Bit de entrada 2
Bit de paridad adicionado por el codificador
Palabra de código generada
0 0 0 000
0 1 1 011
1 0 1 101
1 1 0 110
El conjunto de todas las posibles palabras de código generados por el codificador es 𝟎𝟎𝟎, 𝟎𝟏𝟏, 𝟏𝟎𝟏 y 𝟏𝟏𝟎. Digamos que queremos transmitir el mensaje 𝟎𝟏 a través del sistema de comunicación.
Decodificación por decisión dura:
Ilustración 24: codificador de paridad par y decodificador por decisión dura.
Los bits de mensaje "01" se aplican al codificador de paridad y obtenemos "011" como la palabra de código de salida.
La palabra código de salida "𝟎𝟏𝟏" se transmite a través del canal. El “0" se transmite como “0 voltios” y el “1” como “1 Volt”.
El canal atenúa la señal que se está transmitiendo y el receptor ve una forma de onda distorsionada ("forma de onda del color rojo").
El decodificador por decisión dura toma una decisión basada en la tensión umbral. En nuestro caso se escoge la tensión de umbral como 0,5 voltios (a medio camino entre “0” y “1” Volt). En cada instante de muestreo en el receptor (como se muestra en la ilustración 24) el detector de decisión dura determina el estado del bit sea “0” si el nivel de tensión cae por debajo del umbral y “1” si el nivel de voltaje es superior al umbral. Por lo tanto, la salida del bloque de decisión dura es “𝟎𝟎𝟏". Tal vez esta salida “𝟎𝟎𝟏" no es una palabra de código válida (comparar esto con las todas las palabras de código posibles dadas en la tabla anterior), lo que implica que los bits de mensaje no se pueden recuperar correctamente. El descodificador compara la salida del bloque de decisión dura con todas las posibles palabras de código y calcula la 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝐻𝑎𝑚𝑚𝑖𝑛𝑔 𝑚í𝑛𝑖𝑚𝑎 para cada caso (como se ilustra en la tabla de abajo).
Todas las palabras de código posibles
Salida del decodificador de decisión dura
Distancia de
𝐻𝑎𝑚𝑚𝑖𝑛𝑔
000 001 1
obtener la palabra de código correcto (“𝟎𝟎𝟏” - esto es lo que transmitimos) siempre es 𝟏/𝟑. Así que cuando se emplea la decodificación por decisión dura la probabilidad de recuperar nuestros datos (en este caso particular) es 𝟏/𝟑.
Decodificación por decisión suave
La diferencia entre la decisión por decodificación dura y blanda es la siguiente
En la decodificación por decisión dura, la palabra de código recibida se compara con todas las posibles palabras de código y se selecciona la palabra de código que tenga la 𝒅𝒊𝒔𝒕𝒂𝒏𝒄𝒊𝒂 𝒅𝒆 𝑯𝒂𝒎𝒎𝒊𝒏𝒈 𝒎í𝒏𝒊𝒎𝒂.
En la decodificación por decisión suave, la palabra de código recibida se compara con todas las posibles palabras de código y se selecciona la palabra de código que dé la 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑢𝑐𝑙𝑖𝑑𝑖𝑎𝑛𝑎 𝑚í𝑛𝑖𝑚𝑎. Así, la decodificación por decisión suave mejora el proceso de toma de decisiones mediante el suministro de información de fiabilidad adicional (𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝐸𝑢𝑐𝑙í𝑑𝑒𝑎 calculada o la razón de verosimilitud logarítmica).
Para la misma combinación de codificador y canal veamos el efecto de sustituir el bloque de decisión dura con un bloque de decisión suave como se observa en la ilustración 25.
Los niveles de tensión de la señal recibida en cada instante de muestreo se muestran en la figura. El bloque de decisión suave calcula la 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝐸𝑢𝑐𝑙í𝑑𝑒𝑎 entre la señal recibida y todas las posibles palabras de código.
Palabras válidas
Niveles de voltaje a cada instante de muestreo de la forma de onda
recibida
Cálculo de la distancia Euclidiana
distancia Euclidiana
0 0 0 ( 0𝑉 0𝑉 0𝑉 )
(0.2𝑉 0.4𝑉 0.7𝑉)
(0− 0.2)2 + (0− 0.4)2 + (0− 0.7)2
0.69
0 1 1 ( 0𝑉 1𝑉 1𝑉 )
(0.2𝑉 0.4𝑉 0.7𝑉)
(0− 0.2)2 + (1− 0.4)2 + (1− 0.7)2
0.49
1 0 1 ( 1𝑉 0𝑉 1𝑉 )
(0.2𝑉 0.4𝑉 0.7𝑉)
(1− 0.2)2 + (0− 0.4)2 + (1− 0.7)2
0.89
1 1 0 ( 1𝑉 1𝑉 0𝑉 )
(0.2𝑉 0.4𝑉 0.7𝑉)
(1− 0.2)2+ (1− 0.4)2+ (0−
0.7)2
1.49
La mínima 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝐸𝑢𝑐𝑙í𝑑𝑒𝑎 es "𝟎. 𝟒𝟗", correspondiente a la palabra código "𝟎 𝟏 𝟏" (que es la que transmitimos). El decodificador selecciona esta palabra de código como la salida. A pesar de que el codificador de paridad par no puede corregir errores, el esquema de decisión suave ayudó en la recuperación de los datos en este caso. Este hecho delinea la mejora que se observa cuando se utiliza este esquema de decisión suave en combinación con esquemas de corrección de errores en recepción (𝑭𝑬𝑪) como los códigos de convolución, 𝑳𝑫𝑷𝑪, etc.
A partir de esta ilustración podemos entender que los decodificadores por decisión blanda utilizan toda la información (niveles de tensión en este caso) en el proceso de toma de decisión mientras que los decodificadores por decisión dura no utilizan plenamente la información disponible en la señal recibida (evidente en el cálculo de la distancia de 𝐻𝑎𝑚𝑚𝑖𝑛𝑔 simplemente comparando el nivel de la señal con el umbral por el que se descuidan los niveles reales de tensión).
2.5.5. Algunas aplicaciones de 𝑫𝑺𝑺𝑺
2.5.5.1. Transmisión de señales de baja 𝒅𝒆𝒕𝒆𝒄𝒕𝒂𝒃𝒊𝒍𝒊𝒅𝒂𝒅:
La señal que transporta información se transmite con muy baja potencia relativa al piso de ruido del canal y del receptor. Si la señal 𝑫𝑺𝑺𝑺 ocupa un ancho de banda 𝑾 y la densidad de potencia es 𝜼𝟎 [𝐖𝐚𝐭𝐭 𝐇𝐳⁄ ], la potencia promedio de ruido en el ancho de banda 𝑾 es 𝑷𝑵 = 𝑾 ∗ 𝜼𝟎.
La potencia recibida en el receptor es 𝑃𝑅. Para ocultar la señal se transmite un nivel de potencia tal que 𝑷𝑹⁄𝑷𝑵≪ 𝟏. El receptor de interés recupera la señal débil del piso de ruido por medio de la ganancia de procesamiento y la ganancia de codificación. Otro receptor que no conozca la clave no podrá tomar ventaja de estas dos ganancias y por tanto le será difícil detectar la señal. Se dice que la señal es de baja probabilidad de ser interceptada (𝑳𝑷𝑰).
Ejemplo:
Una señal de espectro disperso 𝑫𝑺𝑺𝑺 se diseña tal que la relación de potencias en el receptor de interés (𝑷𝑹⁄𝑷𝑵) es de 𝟏𝟎−𝟐.
a) si la 𝑬𝒃/𝜼𝟎 deseada para un desempeño aceptable es 𝟏𝟎, determinar el valor mínimo de la ganancia de procesamiento.
Es posible escribir 𝑬𝒃/𝜼𝟎 como
𝑬𝒃⁄𝜼𝟎= 𝑷𝑹𝑻𝒃⁄𝜼𝟎 = 𝑷𝑹𝑳𝒄𝑻𝒄⁄𝜼𝟎 = (𝑷𝑹⁄𝑾𝜼𝟎)𝑳𝒄 = (𝑷𝑹⁄𝑷𝑵)𝑳𝒄
Dado que 𝑬𝒃/𝜼𝟎= 𝟏𝟎 y 𝑷𝑹⁄𝑷𝑵= 𝟏𝟎−𝟐 , se concluye que la ganancia de procesamiento necesaria es 𝑳𝒄 = 𝟏𝟎𝟎𝟎.
en el transmisor y cual es velocidad de transmisión para el sistema de espectro disperso 𝑫𝑺𝑺𝑺.
La expresión para la potencia de la señal recibida es 𝑷𝑹𝒅𝑩 = 𝑷𝑻𝒅𝑩− 𝑳𝒔𝒅𝑩+ 𝑮𝑻𝒅𝑩
Donde 𝑳𝒔𝒅𝑩 es la atenuación de espacio libre y 𝑮𝑻 𝒅𝑩 es la ganancia de la antena. La atenuación es
𝑳𝒔𝒅𝑩= 𝟐𝟎 ∗ 𝐥𝐨𝐠 (𝟒 ∗ 𝝅 ∗ 𝒅/𝝀)
Donde la longitud de onda es 𝝀 = 𝟏𝟎𝟎 𝒎. De esta forma 𝑳𝒔𝒅𝑩 = 𝟏𝟎𝟖 𝒅𝑩 y en consecuencia 𝑷𝑻𝒅𝑩 = 𝑷𝑹𝒅𝑩+ 𝟖𝟖. La potencia recibida puede obtenerse de la condición 𝑷𝑹⁄𝑷𝑵= 𝟏𝟎−𝟐. Primero que todo 𝑷𝑵= 𝑾 ∗ 𝜼𝟎, con 𝜼𝟎 = 𝒌 ∗ 𝑻 = 𝟒 ∗ 𝟏𝟎−𝟐𝟏 𝑾/𝑯𝒛 y 𝑾 = 𝟏𝟎𝟓 𝑯𝒛, de forma que 𝑷𝑵 = 𝟒. 𝟏 ∗ 𝟏𝟎−𝟏𝟔 𝑾 y 𝑷𝑹 = 𝟒. 𝟏 ∗ 𝟏𝟎−𝟏𝟖 𝑾, o equivalentemente 𝑷𝑹𝒅𝑩 = −𝟏𝟕𝟒 𝒅𝑩𝑾. En consecuencia 𝑷𝑻𝒅𝑩 = −𝟖𝟔 𝒅𝑩𝑾, o equivalentemente 𝑷𝑻 = 𝟐. 𝟓 ∗ 𝟏𝟎−𝟗 𝑾. La velocidad de transmisión es 𝑹 = 𝑾 𝑳
𝒄
⁄ =
𝟏𝟎𝟓⁄𝟏𝟎𝟑= 𝟏𝟎𝟎 𝒃𝒊𝒕/𝒔.
2.5.5.2. Acceso múltiple por división de códigos:
Se puede hacer que varias señales de espectro disperso ocupen el mismo ancho de banda del canal siempre y cuando cada una tenga su propia secuencia 𝑷𝑵. Este tipo de transmisión se denomina Acceso múltiple por división de códigos (𝑪𝑫𝑴𝑨).
En la demodulación de 𝑪𝑫𝑴𝑨 las señales de los otros usuarios aparecen como interferencia de ruido aditivo con un nivel que varía en función del número de usuarios del canal en cualquier instante de tiempo. Una ventaja de 𝑪𝑫𝑴𝑨 es que un gran número de usuarios puede acomodarse si cada usuario transmite mensajes por un corto periodo de tiempo. En tal sistema es relativamente simple adicionar nuevos usuarios o disminuir el número de los mismos sin reconfigurar el sistema.
Suponiendo que todos los usuarios transmiten con igual potencia, se puede determinar el número de señales simultaneas que pueden acomodarse. Esto se puede lograr con un canal de control que instruye a los usuarios sobre cuando incrementar o reducir la potencia. Si existen 𝒏𝒖 usuarios simultáneos, la relación deseada de potencia de señal a potencia de interferencia en un receptor dado es
𝑷𝒔 𝑷𝑵
= 𝑷𝒔
(𝑵𝒖− 𝟏)𝑷𝒔
= 𝟏
𝑵𝒖− 𝟏
Para 𝑾/𝑹=1000 y 𝑹𝒄𝒅𝒎𝒊𝒏𝑯 = 𝟒 se obtiene que 𝑵𝒖 = 𝟐𝟎𝟏
En este caso se asume que las secuencias 𝑷𝑵 de todos los usuarios son ortogonales, lo que es difícil de lograr cuando el número de usuarios es grande. El diseño de secuencias con buenas propiedades de correlación es un problema importante que ha recibido mucha atención.
𝑪𝑫𝑴𝑨 Es un método viable para brindar el servicio telefónico celular a cierto número de usuarios móviles. Si se usa codificación predictiva lineal (𝑫𝑷𝑪𝑴) para señales de voz se puede comprimir la velocidad de transmisión de la voz digitalizada a un rango de 𝟒𝟖𝟎𝟎 𝒂 𝟕𝟐𝟎𝟎 𝒃𝒑𝒔. Con la codificación de canal la voz digitalizada puede transmitirse por medio de 𝑷𝑺𝑲 de cuatro fases en un canal de 𝟏𝟎 𝒌𝑯𝒛 de ancho de banda o menos. La señal de cada usuario puede entonces dispersarse mediante 𝑫𝑺𝑺𝑺 a un ancho de banda mayor para la transmisión sobre un canal de acceso múltiple. Por ejemplo, si se dispersa la señal sobre un ancho de banda de 𝑾 = 𝟏 𝑴𝑯𝒛, se tiene una ganancia de procesamiento de 𝑾 𝑹⁄ = 𝟏𝟎𝟎. Esto permitiría que un numero de usuarios relativamente grande acceda al canal de banda ancha simultáneamente.
2.5.5.3. Comunicaciones sobre canales con 𝒎𝒖𝒍𝒕𝒊𝒕𝒓𝒂𝒚𝒆𝒄𝒕𝒐𝒓𝒊𝒂:
Ejemplos de canales con desvanecimiento y 𝑚𝑢𝑙𝑡𝑖𝑡𝑟𝑎𝑦𝑒𝑐𝑡𝑜𝑟𝑖𝑎 incluyen la propagación 𝑖𝑜𝑛𝑜𝑠𝑓é𝑟𝑖𝑐𝑎 en la banda de 𝑯𝑭(𝟑 𝒂 𝟑𝟎 𝑴𝑯𝒛), donde las capas 𝑖𝑜𝑛𝑜𝑠𝑓é𝑟𝑖𝑐𝑎s sirven como reflectores de la señal y en los sistemas de comunicaciones de radio móviles, donde la propagación 𝑚𝑢𝑙𝑡𝑖𝑐𝑎𝑚𝑖𝑛𝑜 se debe a reflexiones en edificios, árboles y otros obstáculos localizados entre el transmisor y el receptor.
Si 𝑾 > 𝑩𝒄𝒃 (ancho de banda de coherencia del canal ver nota relacionada:
evita la 𝑰𝑺𝑰. Una segunda aproximación es diseñar la señal para utilizar el ancho de banda de señal entero 𝑾 y transmitirla sobre una portadora única. En este caso, el canal es selectivo en frecuencia y las componentes 𝑚𝑢𝑙𝑡𝑖𝑡𝑟𝑎𝑦𝑒𝑐𝑡𝑜𝑟𝑖𝑎 con retardos diferenciales de 𝟏 𝑾⁄ o mayores pueden resolverse.
𝑫𝑺𝑺𝑺 es una técnica particularmente efectiva para generar una señal de banda ancha para resolver los componentes de señal 𝑚𝑢𝑙𝑡𝑖𝑡𝑟𝑎𝑦𝑒𝑐𝑡𝑜𝑟𝑖𝑎. Mediante la separación de las componentes 𝑚𝑢𝑙𝑡𝑖𝑡𝑟𝑎𝑦𝑒𝑐𝑡𝑜𝑟𝑖𝑎 es posible reducir también los efectos de desvanecimiento.
La ISI puede evitarse si se desea reducir la velocidad de transmisión de símbolos 𝟏/𝑻 tal que 𝑻 ≫ 𝑻𝒎. En este caso se emplea una señal de 𝑫𝑺𝑺𝑺 con ancho de banda 𝑾 para resolver el 𝑚𝑢𝑙𝑡𝑖𝑐𝑎𝑚𝑖𝑛𝑜.
Así el canal es selectivo en frecuencia y el modelo apropiado del canal es el modelo de líneas de retardo con coeficientes variantes con el tiempo. El demodulador óptimo para este canal es un filtro acoplado a este modelo. O sea el filtro acoplado es un modelo de línea de retardo s de longitud 𝑻𝒎, tal como se muestra en la ilustración 26, que emplea un conjunto de 𝑐𝑜𝑟𝑟𝑒𝑙𝑎𝑑𝑜𝑟𝑒𝑠, uno por cada tap, para formar la correlación cruzada de la señal recibida con cada una de las componentes de la señal 𝑚𝑢𝑙𝑡𝑖𝑐𝑎𝑚𝑖𝑛𝑜 posiblemente resolubles.
Ilustración 26: Demodulador tipo RAKE para demodulación coherente.
2.6.Espectro disperso por saltos de frecuencia (𝑭𝑯𝑺𝑺): 2.6.1. Generalidades:
El ancho de banda disponible 𝑾 se subdivide en gran número de franjas de frecuencia no solapadas.
En cualquier intervalo de señalización (intervalo de símbolo) la señal enviada ocupa una o más frecuencias disponibles como se observa en la ilustración 27.
Ilustración 27: Asignación de frecuencias en 𝑭𝑯𝑺𝑺 para los distintos intervalos de señalización.
Los sistemas 𝑭𝑯𝑺𝑺 normalmente usan 𝑴𝑭𝑺𝑲, de tal manera que se escoge para la transmisión una de 𝑴 frecuencias en términos de los bits de información que se quieren enviar, como se muestra en la ilustración 28.
Ilustración 29: Sistema 𝑭𝑯𝑺𝑺
Si se toman 𝒎 bits del generador 𝑷𝑵 es posible generar 𝟐𝒎− 𝟏 frecuencias portadoras.
En el receptor se debe mantener el sincronismo del generador 𝑷𝑵 extrayéndolo de la información de la señal recibida.
En 𝑭𝑯𝑺𝑺 se usa modulación 𝑭𝑺𝑲 y demodulación no coherente debido a que, aunque 𝑷𝑺𝑲 tiene mejores prestaciones en cuanto a la probabilidad de error, es muy difícil mantener la coherencia de fase entre el transmisor y el receptor en la síntesis de frecuencias utilizadas en el patrón de saltos y también en la propagación de la señal sobre el canal.
𝑭𝑯𝑺𝑺 se utiliza principalmente en sistemas de comunicaciones digitales que requieran protección antibloqueo y en 𝑪𝑫𝑴𝑨 donde varios usuarios comparten un ancho de banda común.
Se prefiere 𝑭𝑯𝑺𝑺 sobre 𝑫𝑺𝑺𝑺 debido a que los requerimientos de sincronización inherentes a esta última son muy sofisticados:
o En 𝑫𝑺𝑺𝑺 la sincronización debe establecerse durante una fracción del intervalo de chip 𝑻𝒄 = 𝟏/𝑾.
o En 𝑭𝑯𝑺𝑺 el intervalo de chip es el tiempo gastado en transmitir una señal en una franja de frecuencia determinada de ancho de banda 𝑩 ≪ 𝑾 . Este tiempo está determinado por 𝑻𝒄 ≅ 𝟏/𝑩 ≫ 𝟏/𝑾.
o De esta forma los requerimientos de temporizado en un sistema 𝑭𝑯𝑺𝑺 no son tan restrictivos como en un sistema 𝑫𝑺𝑺𝑺.
2.6.2. Clasificación:
Dependiendo de la velocidad de saltos 𝑹𝒉 con respecto a la velocidad de símbolos 𝑹𝒔 se habla de dos tipos de 𝑭𝑯𝑺𝑺:
o Si 𝑹𝒉 > 𝑹𝒔 se habla de 𝑭𝑯𝑺𝑺 rápido y en este caso se producen más de un salto de frecuencia por símbolo.
2.6.2.1. SISTEMAS 𝑭𝑯𝑺𝑺 LENTOS
Para el análisis se asume 𝑭𝑯𝑺𝑺 con 𝑭𝑺𝑲 binaria en el cual 𝑹𝒉 = 𝟏 𝒔𝒂𝒍𝒕𝒐/𝒃𝒊𝒕 y que la interferencia es 𝑨𝑾𝑮𝑵 de banda ancha con densidad espectral 𝑱𝟎.
Como la demodulación es no coherente se tiene una probabilidad de error dada por 𝑷𝟐 = 𝒆−𝝆𝒃/𝟐⁄ (𝟗. 𝟏𝟓)𝟐
En donde
𝝆𝒃 = 𝑬𝒃⁄𝑱𝟎
Es la relación 𝑺𝑵𝑹 por bit. Como
𝑬𝒃= 𝑷𝒔∗ 𝑻𝒃 = 𝑷𝒔⁄𝑹𝒃
Y además
𝑱𝟎= 𝑷𝒋⁄𝑾
Con 𝑷𝒋 la potencia promedio de la interferencia de banda ancha, se puede concluir que 𝝆𝒃 = 𝑬𝒃⁄ 𝑱𝟎
= (𝑾/𝑹) (𝑷⁄ 𝒋/𝑷𝒔)
Donde 𝑾/𝑹 es la ganancia de procesamiento y 𝑷𝒋/𝑷𝒔 es el margen de bloqueo.
Los sistemas 𝑭𝑯𝑺𝑺 son particularmente susceptibles a 𝒊𝒏𝒕𝒆𝒓𝒇𝒆𝒓𝒆𝒏𝒄𝒊𝒂𝒔 𝒅𝒆 𝒃𝒂𝒏𝒅𝒂 𝒑𝒂𝒓𝒄𝒊𝒂𝒍 que pueden resultar tanto del bloqueo intencional como de sistemas 𝑪𝑫𝑴𝑨 𝑭𝑯𝑺𝑺.
Se supone que la 𝒊𝒏𝒕𝒆𝒓𝒇𝒆𝒓𝒆𝒏𝒄𝒊𝒂 𝒅𝒆 𝒃𝒂𝒏𝒅𝒂 𝒑𝒂𝒓𝒄𝒊𝒂𝒍 se modela como un proceso estocástico Gaussiano de media cero con densidad espectral plana (𝑺𝒋(𝒇) = 𝑱𝟎/𝜶) sobre la fracción de banda 𝜶𝑾 y cero en el resto y que la señal bloqueadora selecciona 𝜶 para optimizar el efecto sobre el sistema de comunicaciones.
Derivando e igualando a cero se halla el valor de 𝜶 que maximiza la probabilidad de error
𝜶∗ = { 𝟐 𝝆⁄ 𝒃 𝝆𝒃 ≥ 𝟐 𝟏, 𝝆𝒃< 𝟐
La probabilidad de error en este caso está dada por
𝑷𝟐 = {
𝒆−𝟏⁄𝝆𝒃 𝝆𝒃 ≥ 𝟐 𝒆−𝝆𝒃/𝟐⁄ 𝝆𝟐
𝒃< 𝟐
Ilustración 30: Desempeño de 𝑭𝑯𝑺𝑺 binario lento con interferencia de banda parcial
La probabilidad de error disminuye exponencialmente para el bloqueo de banda completo pero, para el caso de bloqueo parcial, disminuye solo inversamente proporcional a 𝑬𝒃/𝑱𝟎. Este comportamiento es similar al del caso de 𝑫𝑺𝑺𝑺 con bloqueo pulsado y para el caso de 𝑭𝑺𝑲 binario en un canal con desvanecimiento de Rayleigh.
Esta situación se puede mejorar utilizando repetición simple de los bits de información sobre frecuencias diferentes (codificación de canal) lo que conduce a una probabilidad de error de
𝑷𝟐= 𝒆−𝝆𝒃/𝟒
Lo que significa que la probabilidad de error lograda con el diseño óptimo del código disminuye exponencialmente con el incremento de la 𝑺𝑵𝑹 y está a 𝟑 𝒅𝑩 del desempeño obtenido en un canal 𝑨𝑾𝑮𝑵.
2.6.2.2. SISTEMAS 𝑭𝑯𝑺𝑺 RÁPIDOS
En este caso la rata de saltos es algún múltiplo de la velocidad de transmisión de símbolos. Cada intervalo de símbolo se divide en 𝑵 sub intervalos, denominados chips, y una
de las 𝑴 frecuencias se transmite en cada sub intervalo.
La rata de saltos se elige lo suficientemente alta tal que una bloqueadora potencial no tenga tiempo suficiente para detectar la presencia de la frecuencia transmitida y tampoco para sintetizar una señal bloqueadora que ocupe el mismo ancho de banda. En el receptor para remover el patrón de saltos de frecuencia se mezcla la señal
recibida con una portadora de frecuencia adecuada y se vuelve, en todos los sub intervalos, a la banda de frecuencias común de 𝑴 frecuencias posibles transmitidas. Se pasa esa señal por 𝑴 filtros acoplados sintonizados a cada una de las 𝑴 frecuencias, las cuales se muestrean al final de cada sub intervalo y finalmente se pasan al detector. La detección es no coherente y la decisión se basa en la magnitud de la salida de los filtros.
Dado que cada símbolo se transmite sobre 𝑵 chips, la decodificación puede realizarse sobre la base de decisiones fuertes o decisiones suaves.
Ejemplo:
Es posible suponer que se usa 𝑭𝑺𝑲 para transmitir símbolos binarios, y cada uno de los símbolos se transmite sobre 𝑵 saltos de frecuencia. Determinar la probabilidad de error par un canal 𝑨𝑾𝑮𝑵 si se utiliza 𝒅𝒆𝒄𝒐𝒅𝒊𝒇𝒊𝒄𝒂𝒄𝒊ó𝒏 𝒄𝒐𝒏 𝒅𝒆𝒄𝒊𝒔𝒊ó𝒏 𝒇𝒖𝒆𝒓𝒕𝒆.
La probabilidad de error para la detección no coherente de 𝑭𝑺𝑲 binaria para cada salto de frecuencia es
En consecuencia, la probabilidad de un bit en error será
𝑷𝟐= ∑ (𝑵
𝒎) 𝒑
𝒎(𝟏 − 𝒑)𝑵−𝒎 𝑵
𝒎=𝑵+𝟏𝟐 𝑵 𝒊𝒎𝒑𝒂𝒓
(𝟗. 𝟏𝟖)
Donde 𝒑 esta dada por (𝟗. 𝟏𝟕).
Debería notarse que la probabilidad de error 𝑷𝟐 para la decodificación con decisión fuerte de los 𝑵 chips será mayor que la probabilidad de error para un 𝒔𝒂𝒍𝒕𝒐/𝒃𝒊𝒕 simple del sistema 𝑭𝑯𝑺𝑺, la cual está dada por (𝟗. 𝟏𝟓), cuando la 𝑺𝑵𝑹 por bit 𝝆𝒃 es la misma en los dos sistemas. Sin embargo lo opuesto es también cierto en la presencia de una bloqueadora.
La alternativa de la decodificación con decisión fuerte es la 𝒅𝒆𝒄𝒐𝒅𝒊𝒇𝒊𝒄𝒂𝒄𝒊ó𝒏 𝒄𝒐𝒏 𝒅𝒆𝒄𝒊𝒔𝒊ó𝒏 𝒔𝒖𝒂𝒗𝒆 en la cual las magnitudes de las salidas correspondientes de los filtros acoplados se suman sobre los 𝑵 chips y se realiza una única decisión con base en la frecuencia que provee la mayor salida.
Para 𝑭𝑺𝑲 binaria ortogonal, las dos métricas de decisión suave para los 𝑵 chips, suponiendo que se transmitió 𝒇𝟏, serán
𝑫𝑴𝟏 = ∑ |𝑬𝒃
𝑵 + 𝒗𝟏𝒌| 𝟐 𝑵
𝒌=𝟏
𝑫𝑴𝟐= ∑|𝒗𝟐𝒌|𝟐 𝑵
𝒌=𝟏
Donde {𝒗𝟏𝒌} y {𝒗𝟐𝒌} son los componentes de ruido de los dos filtros acoplados para los 𝑵 chips.
𝑷𝟐= 𝟏 𝟐𝟐𝑵−𝟏𝒆
−𝝆𝒃/𝟐∑ 𝑲
𝒊(𝝆𝒃/𝟐)𝒊 𝑵−𝟏
𝒊=𝟎
En donde
𝑲𝒊= (𝟏 𝒊!⁄ ) ∑ (𝟐𝑵 − 𝟏
𝒓 )
𝑵−𝟏−𝒊
𝒓=𝟎
La probabilidad de error en este caso es menor que en el caso de decisión fuerte para la misma 𝑺𝑵𝑹. La diferencia en desempeño es la 𝒑é𝒓𝒅𝒊𝒅𝒂𝒆𝒏 𝒍𝒂𝒅𝒆𝒄𝒐𝒅𝒊𝒇𝒊𝒄𝒂𝒄𝒊ó𝒏𝒄𝒐𝒏 𝒅𝒆𝒄𝒊𝒔𝒊ó𝒏 𝒇𝒖𝒆𝒓𝒕𝒆. Sin embargo esta probabilidad de error es mayor que la de 𝑭𝑺𝑲 con salto único en un canal 𝑨𝑾𝑮𝑵. La diferencia en desempeño para la misma 𝑺𝑵𝑹 se debe a la combinación no coherente en el decodificador. Esta pérdida se denomina usualmente 𝒑é𝒓𝒅𝒊𝒅𝒂 𝒑𝒐𝒓 𝒄𝒐𝒎𝒃𝒊𝒏𝒂𝒄𝒊ó𝒏 𝒏𝒐 𝒄𝒐𝒉𝒆𝒓𝒆𝒏𝒕𝒆 𝒅𝒆𝒍 𝒔𝒊𝒔𝒕𝒆𝒎𝒂.
Es bueno normalizar las salidas de los filtros acoplados en presencia de una señal bloqueadora de banda parcial de tal manera que si la decisión es suave una interferencia fuerte dentro de la banda de la señal no domine la salida del 𝒄𝒐𝒎𝒃𝒊𝒏𝒂𝒅𝒐𝒓. En consecuencia con un escalamiento apropiado, un sistema 𝑭𝑯𝑺𝑺 no será tan vulnerable al bloqueo o interferencia de banda parcial dado que la información transmitida por bit estará distribuida sobre 𝑵 saltos de frecuencia.
2.6.3. APLICACIONES DE 𝑭𝑯𝑺𝑺
La técnica de 𝑭𝑯𝑺𝑺 es una alternativa viable a 𝑫𝑺𝑺𝑺 en el caso de protección contra una señal bloqueadora y para 𝑪𝑫𝑴𝑨. En los sistemas 𝑪𝑫𝑴𝑨 basados en 𝑭𝑯𝑺𝑺, cada par transmisor-receptor tiene asignado su propio 𝒑𝒂𝒕𝒓ó𝒏 𝒔𝒆𝒖𝒅𝒐𝒂𝒍𝒆𝒂𝒕𝒐𝒓𝒊𝒐 𝒅𝒆 𝒔𝒂𝒍𝒕𝒐𝒔 de frecuencia. Aparte de esta característica distintiva, los transmisores y receptores de todos los usuarios pueden ser idénticos, o sea, con los mismos codificadores/decodificadores, moduladores/demoduladores.
Los sistemas 𝑪𝑫𝑴𝑨 basados en señales 𝑭𝑯𝑺𝑺 son particularmente atractivos para usuarios móviles (en tierra, mar o aire) porque los requerimientos de temporizado (sincronización) no son tan sofisticados como en un sistema 𝑫𝑺𝑺𝑺.
Además, se han desarrollado técnicas de síntesis de frecuencia y la implementación asociada, que hacen posible saltos de frecuencia sobre anchos de banda significativamente grandes, en uno o dos órdenes de magnitud, que aquellos actualmente posibles con señales 𝑫𝑺𝑺𝑺.