Diseño e Implementación de un Sistema Scada Para el Control de Nivel del Tanque de Mezcla de La Planta de Procesos Análogos (Ppa), de la UDFJDC
131
0
0
Texto completo
(2) DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA SCADA PARA EL CONTROL DE NIVEL DEL TANQUE DE MEZCLA DE LA PLANTA DE PROCESOS ANÁLOGOS (PPA), DE LA UDFJDC. ESPITIA BERNAL FERNEY DAVID ORDOÑEZ BELTRÁN JEYSON ALBERTO. Tesis de Ingeniería en Control. Director: Ing. Jorge Eduardo Porras Bohada. Universidad Distrital Francisco José de Caldas Facultad Tecnológica Programa de Ingeniería en Control Bogotá, Agosto de 2015.
(3) ESPITIA BERNAL FERNEY DAVID ORDOÑEZ BELTRÁN JEYSON ALBERTO. DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA SCADA PARA EL CONTROL DE NIVEL DEL TANQUE DE MEZCLA DE LA PLANTA DE PROCESOS ANÁLOGOS (PPA), DE LA UDFJDC. Tesis presentada al Programa de Ingeniería en Control de la universidad Distrital “Francisco José de Caldas” Facultad Tecnológica, para obtener el título de Ingeniero en Control. Programa: Ingeniería en Control. Director: Ing. Jorge Eduardo Porras Bohada. Bogotá, Agosto de 2015.
(4) Dedicatoria Para nuestra familia, amigos y profesores que nos apoyaron a lo largo de nuestra carrera e hicieron que creciera la fuerza para luchar y poder lograr este gran objetivo en nuestras vidas..
(5) Agradecimientos A Dios, nuestra familia y amigos que nos ayudaron con cada uno de nuestros propósitos para poder cumplirlos y finalmente realizar nuestro proyecto final de ingeniería..
(6) Resumen El laboratorio de industrial de la Universidad Distrital Francisco José de Caldas Facultad Tecnológica, ubicado en la localidad de Ciudad Bolívar (Bogotá-Colombia), cuenta con equipos de automatización que no estaban siendo utilizados en un proyecto real ni en aplicaciones útiles para la universidad ni para el laboratorio. En el trascurso de la carrera de Ingeniería en Control y el desarrollo de las asignaturas entre ellas “instrumentación de procesos” se desarrollaron prototipos de máquinas industriales que fueran capaces de simular procesos de automatización y control. Estos prototipos se encontraban en desarrollo para lo cual fue necesario formalizar la terminación del prototipo industrial el cual fue desarrollado con el presente proyecto de grado. Dentro de los procesos industriales se deben reconocer e interpretar datos de variables físicas (Nivel, Presión, Temperatura, Flujo, PH) para poder actuar de una manera que se mejoren los procesos y se optimice el consumo de energía. En este proyecto se realizó una identificación del sistema por métodos analíticos y experimentales para lo cual fue necesario el uso del software MATLAB, una herramienta útil para graficar y minimizar tiempos en los cálculos matemáticos necesarios para encontrar el modelo y el comportamiento del sistema. Seguido a esto se realizó el diseño del controlador PID en tiempo discreto por medio del lugar de las raíces para luego ser implementado en el PLC Allen Bradley con ayuda del software RSLogix 5000 y su respectiva HMI para la correcta visualización y control del proceso en tiempo real por parte del usuario. En este trabajo de grado es posible visualizar un sistema que es capaz de controlarse de manera automática mediante el desarrollo e implementación de un sistema SCADA que permite realizar acciones de visualización y control de la variable de nivel a través de una pantalla HMI de Allen Bradley.. Palabras clave: Diseño de control, Control automático, control de nivel, sistemas SCADA, sistemas de lazo cerrado, control digital, MATLAB.. 6.
(7) Abstract Industrial laboratory of University Francisco José de Caldas Faculty of Technology, located in the town of Ciudad Bolivar (Bogota-Colombia), has automation equipment were not being used in a real project or useful applications for college or Laboratory. In the course of Engineering in Control and development of subjects including "implementation process" industrial prototype machines that were able to simulate automation and control processes were developed. These prototypes were in development for which it was necessary to formalize the termination of the industrial prototype which was developed with this project grade. Within the industrial processes must recognize and interpret data of physical variables (level, pressure, temperature, flow, PH) to act in a way that will improve processes and optimize energy consumption. In this project, a system identification was performed by experimental methods and simulated for which it was necessary to use MATLAB software, useful for plotting and minimize time on mathematical calculations required to find the model and system performance tools. Following this the tuning of the PID controller implemented from Allen Bradley PLC with the aid of RSLogix 5000 and the respective HMI for the proper display of the process in real time by the user is performed. In this paper grade it is possible to visualize a system that is capable of automatically controlled through the development and implementation of a SCADA system that allows visualization and control actions variable level, through a screen HMI Allen Bradley.. Keywords: Control design, Automatic control, level control, SCADA systems, close loop systems, digital control, MATLAB.. 7.
(8) Tabla de Contenido Resumen ................................................................................................................. 6 Abstract ................................................................................................................... 7 Tabla de Contenido ................................................................................................. 8 Lista de Figuras ..................................................................................................... 10 Lista de Tablas ...................................................................................................... 12 1.. Introducción .................................................................................................... 13. 1.1.. Planteamiento del problema ........................................................................ 14. 1.2.. Objetivos...................................................................................................... 15. 1.2.1.. Objetivo General ...................................................................................... 15. 1.2.2.. Objetivos Específicos ............................................................................... 15. 2.. Marco de Referencia....................................................................................... 16. 2.1. 3.. Antecedentes............................................................................................... 16 Metodología .................................................................................................... 17. 3.1.. Marco Teórico.............................................................................................. 17. 3.1.1.. Sensor de nivel ultrasónico ...................................................................... 17. 3.1.2.. Sistemas de control .................................................................................. 18. 3.1.2.1.. Sistemas no lineales ............................................................................ 18. 3.1.2.2.. Modelamiento de los sistemas ............................................................. 19. 3.1.2.3.. Método de obtención de modelos ......................................................... 19. 3.1.2.4.. Identificación de los sistemas .............................................................. 19. 3.1.2.5.. Tipos de modelos paramétricos ............................................................ 20. 3.1.3.. Controladores PID ................................................................................... 22. 3.1.3.1.. Estructura.............................................................................................. 22. 3.1.3.2.. PID: acción de control proporcional-integral-derivativa ......................... 23. 3.1.4.. Modelamiento de sistema tanque cilíndrico Horizontal ........................... 23. 3.1.4.1.. Capacitancia ......................................................................................... 23. 3.1.4.2.. Resistencia ........................................................................................... 28. 3.1.4.3.. Fuentes ................................................................................................. 29. 3.2.. Descripción general de la planta PPA. ........................................................ 31. 8.
(9) 3.3.. Caracterización del sensor ......................................................................... 32. 3.3.1.. Descripción del Sensor ultrasónico .......................................................... 37. 3.3.2.. Instalación y calibración del sensor ultrasónico........................................ 38. 3.4.. Modelamiento .............................................................................................. 40. 3.4.1.. Modelamiento del sensor ......................................................................... 40. 3.4.2.. Modelamiento del tanque cilíndrico horizontal.......................................... 43. 3.4.2.1. 3.4.3. 3.5.. Experimento - Descarga del tanque cilíndrico - .................................... 48 Modelamiento bomba ............................................................................... 53. Curvas de reacción de proceso e Identificación .......................................... 58. 3.5.1.. Respuesta transitoria de la planta ............................................................ 64. 3.5.2.. Diseño por lugar geométrico de las raíces ............................................... 66. 3.5.3.. Respuesta transitoria del (sistema de control) ......................................... 71. 3.6.. Sincronización del PID RSLogix 5000 ......................................................... 72. 3.7.. Arquitectura del sistema SCADA ................................................................. 74. Creación de la Red ................................................................................................ 76 3.7.1.. Configuración del ordenador .................................................................... 76. 3.7.2.. Configuración de RSLinx Classic ............................................................. 77. 3.7.3.. Configuración de la HMI ........................................................................... 78. 3.7.4.. Configuración del variador ....................................................................... 78. 3.7.5.. Configuración del módulo análogo ........................................................... 80. 3.8.. Códigos realizados en RSLogix5000........................................................... 81. 3.8.1. 3.9.. Lectura de los datos del sensor................................................................ 81 Diseño de Interfaz Gráfica de Usuario ......................................................... 85. 3.9.1.. Factory Talk View ..................................................................................... 86. 4.. Conclusiones .................................................................................................. 88. 5.. Recomendaciones .......................................................................................... 90. 6.. Referencias..................................................................................................... 91. 7.. ANEXOS ......................................................................................................... 93. 7.1.. Anexo 1. Distribución del panel eléctrico y de control de la PPA................. 93. 7.2.. Anexo 2. Pantallas de la HMI ...................................................................... 94. 7.3.. Manual de prácticas .................................................................................. 104. 9.
(10) Lista de Figuras Fig. 1 Sensor Pepperl Fuchs UB500-18GM75-I-V15. 17 Fig. 2 Diagramas de bloques de las estructuras de la tabla 1. 22 Fig. 3 Diagrama en bloques de un sistema controlado con un PID. 23 Fig. 4 Presión Vs. Volumen del líquido para un recipiente con sección transversal variable. 24 Fig. 5 Presión-versus-volumen del líquido para un recipiente con A constante. 25 Fig. 6 Recipiente cilíndrico. 27 Fig. 7 Capacitancia del recipiente cilíndrico horizontal. 27 Fig. 8 Símbolo de una válvula hidráulica. 28 Fig. 9 (a) flujo-versus-diferencia de presión dada por (19). (b) interpretación geométrica de la resistencia hidráulica. 28 Fig. 10 Representación simbólica de una bomba. 30 Fig. 11 Curvas típicas de una bomba centrifuga donde ∆𝒑 = 𝒑𝟐 − 𝒑𝟏. (a)Por tres diferentes velocidades de la bomba (𝝎𝟏 < 𝝎𝟐 < 𝝎𝟑). (b)Mostrado la aproximación lineal. 30 Fig. 12 Diagrama P&ID de la planta PPA. 32 Fig. 13 Sensor ultrasónico UB500-18GM75-I-V15. 38 Fig. 14 Conector 5 pines V15-G-2M-PVC. 38 Fig. 15 Instalación del sensor. 38 Fig. 16 Diagrama de conexión del sensor. 39 Fig. 17 Respuesta en corriente del sensor en el punto máximo. 40 Fig. 18 Respuesta en corriente del sensor en el punto mínimo. 40 Fig. 19 Diagrama de bloques del sensor ultrasónico. 40 Fig. 20 Gráfica de datos Altura vs. Corriente. 42 Fig. 21 Diagrama de bloques en simulink del modelo del sensor ultrasónico. 43 Fig. 22 Dimensión del tanque cilíndrico, vista frontal y lateral respectivamente. 44 Fig. 23 Diagrama de bloques del modelo del tanque cilíndrico. 45 Fig. 24 Modelo hidráulico tanque con una entrada y una salida. 46 Fig. 25 Diagrama de bloques del modelo del tanque cilíndrico. 47 Fig. 26 Sistema hidráulico del tanque cilíndrico horizontal de la planta PPA. 47 Fig. 27 Vista frontal del tanque cilíndrico. 48 Fig. 28 Gráfica descarga del tanque - Nivel vs. Tiempo. 49 Fig. 29 Gráfica de Caudal Vs. Nivel. 50 Fig. 30 Gráfica de comparación de datos entre reales y simulados. 51 Fig. 31 Gráfica de nivel vs. Caudal de salida. 51 Fig. 32 Modelo lineal relacionada entre altura y caudal. 52 Fig. 33 Modelamiento de la válvula. 52 Fig. 34 Diagrama de bloques del modelo final del tanque cilíndrico. 53 Fig. 35 Bloque para leer la variable de frecuencia en RSLogix 5000. 53 Fig. 36 Diagrama de bloques del sistema actuador. 54 Fig. 37 Modelo dinámico simple para una bomba. 54 Fig. 38 Bloque utilizado para el modelo de la bomba en simulink. 55 10.
(11) Fig. 39 Rampa de aceleración y desaceleración generado por el variador de velocidad. 56 Fig. 40 Datos de tiempo de la rampa de aceleración y desaceleración programada en RSLogix 5000. 56 Fig. 41 Gráfica de respuesta de un sistema de primer orden. 57 Fig. 42 Diagrama de bloques del modelo de la bomba con retardo. 58 Fig. 43 Diagrama de bloques del modelo completo del sistema de tanque de mezcla de la PPA. 58 Fig. 44 Gráfica de la simulación en lazo abierto. 59 Fig. 45 Gráfica de comparación de datos de simulación y datos reales. 60 Fig. 46 Gráfica de los datos tomados para diferentes puntos de operación. 60 Fig. 47 Diferentes modelos generados con IDENT. 61 Fig. 48 Señal cuadrada generada alrededor del punto de operación. 62 Fig. 49 Gráfica de la Señal pseudoaleatoria en punto de operación 24.5 cm. 63 Fig. 50 Datos exportados del modelo BJ 33332 en Matlab. 64 Fig. 51 Respuesta al paso del sistema de tanque de mezcla. 65 Fig. 52 Gráfica el tiempo de levantamiento de la planta en lazo abierto. 65 Fig. 53 Configuraciones de controladores en sisotool de Matlab. 68 Fig. 54 Lugar de las raíces de la planta controlada en lazo cerrado. 69 Fig. 55 Diagrama de bloques en simulink de la planta con controlador en lazo cerrado. 71 Fig. 56 Respuesta en simulación del controlador PID. 72 Fig. 57 Configuración de PV y CV del bloque PID en RSLogix5000. 72 Fig. 58 Respuesta del controlador aplicado a la planta para los SetPoint A) 10, B) 15, C) 20, D) 25, E)30 y F)35. 73 Fig. 59 Diagrama de bloques general de un sistema SCADA. 75 Fig. 60 Arquitectura sistema SCADA tanque cilíndrico planta PPA. 76 Fig. 61 Pantalla inicial de RSLinx para configurar la IP de la red. 77 Fig. 62 Red creada en RSLinx. 78 Fig. 63 Configuración de la IP para la HMI. 78 Fig. 64 Selección de la MAC del módulo de comunicación del Variador de Velocidad. 79 Fig. 65 Configuración final del variador de velocidad agregado al programa principal. 80 Fig. 66 Programación en Ladder para las subrutinas del sensor. 82 Fig. 67 Programación en texto estructurado para las subrutinas del sensor. 82 Fig. 68 Rutinas creadas en el programa principal. 82 Fig. 69 Salto a subrutinas por medio de lenguaje Ladder. 83 Fig. 70 Alarmas creadas con programación SFC. 83 Fig. 71 Bloque PID agregado al programa principal programado en Ladder. 85 Fig. 72 Pantallas del sistema SCADA de la PPA. 87. 11.
(12) Lista de Tablas Tabla 1. Diferentes estructuras de modelos paramétricos. Tabla 2 Datos tomados para la caracterización del sensor. Tabla 3 Datos de caracterización del sensor. Tabla 4 Datos tomados con el sensor ultrasónico. Tabla 5 Datos técnicos del sensor ultrasónico. Tabla 6 Datos Nivel vs. Volumen. Tabla 7 Caudal calculado. Tabla 8 Datos Variador vs. Caudal. Tabla 9 Porcentajes de aproximación en los diferentes puntos de operación. Tabla 10. Porcentajes de aproximación identificados con señal cuadrada. Tabla 11. Respuesta de la planta en lazo abierto Tabla 12. Modelos de controlador PID con los que se puede diseñar en un PLC Allen Bradley. Tabla 13. Valores para el PID de Kp, Ki, Kd y T. Tabla 14. Comparativa de la planta en lazo abierto y lazo cerrado. Tabla 15 Respuesta transitoria del sistema de control. Tabla 16. Orden de las IPs en la red Ethernet. Tabla 17. Tabla lógica de los estados de alarma para el tanque de suministro. Tabla 18. Colores de estado utilizados para la programación de la HMI.. 12. 21 34 37 41 42 49 50 54 61 63 65 66 71 71 74 76 84 86.
(13) 1. Introducción Debido a la necesidad de la industria mundial de implementar sistemas automatizados que sean capaces de reemplazar el ser humano sobre todo en procesos donde éste se encuentre expuesto a grandes riesgos, es necesario para el desarrollo de la ingeniería en control tener la capacidad de reconocer, modificar y aplicar conceptos de instrumentación, automatización y control. En el desarrollo de la carrera Ingeniería en Control de la Universidad Distrital Francisco José de Caldas se ha logrado realizar grandes proyectos con los conocimientos adquiridos en las asignaturas de semestres finales, durante estos semestres se desarrolló en un principio la planta de procesos análogos (PPA) como una manera de poder evidenciar de manera práctica las metodologías aprendidas en los cursos. Teniendo la PPA como modelo básico se busca mejorar de alguna manera esta planta en donde se pueda dejar un legado para estudiantes que vienen en proceso de formación y donde puedan tener una introducción a lo que se ve realmente a nivel industrial sin dejar a un lado que esta planta realmente es un prototipo a pequeña escala de un proceso industrial. Se requiere realizar la programación de la interfaz gráfica en una HMI que se ejecuta desde un PLC (Allen Bradley) que permita a los usuarios finales simular procesos de supervisión y control de una planta de nivel que puede tener diferentes comportamientos de acuerdo a la configuración dada. Con la introducción a la planta de sensores, PLC’s, HMI’s y software de tipo industrial los cuales son ampliamente utilizados en grandes empresas que implementan sistemas automatizados se busca lograr desarrollar un prototipo de planta donde se pueda no solamente evidenciar las metodologías aprendidas en el transcurso de la carrera sino también investigar y aplicar estas para mejorar los sistemas que hoy en día existen a nivel industrial.. 13.
(14) 1.1.. Planteamiento del problema. La planta de procesos análogos PPA ubicada en la sala altamente automatizada de la Universidad Distrital Francisco José de Caldas Facultad Tecnológica, no cuenta con ningún tipo de sensor ni controlador ya que no se ha realizado el modelamiento de ninguno de los tanques para poder implementar de manera adecuada la instrumentación y el algoritmo que permita controlar la variable de nivel en el tanque de mezcla. Al tener esta problemática es imposible que los estudiantes puedan obtener los datos reales del proceso para poder realizar simulaciones, cálculos matemáticos y prácticas de laboratorio especialmente enfocadas al control de nivel del tanque de mezcla de la planta (PPA), de manera que les permita desarrollar habilidades y capacidades en el área de control y automatización de procesos reales. Luego existen problemáticas que requieren de una ardua investigación ya que el tanque a modelar es de comportamiento no lineal y al no contar con diferentes sensores para facilitar la obtención de datos que sean de utilidad para el modelamiento del sistema hace que el trabajo matemático a realizar requiera la utilización de estadísticas, especialmente promedios para lograr obtener datos finales. También es necesario generar una interfaz gráfica amigable con el usuario final ya que generalmente quien se encuentre con el proceso deberá empezar con una etapa de entendimiento del sistema y respuestas a preguntas que parecen ser obvias pero que finalmente requieren bastante información para ser resueltas, enfocándose especialmente en los comportamientos nos esperados del llenado del tanque ya que tiene una capacitancia variable.. 14.
(15) 1.2.. Objetivos. 1.2.1. Objetivo General. Diseñar e implementar un sistema SCADA para el control de nivel del tanque de mezcla de la planta PPA por medio de un controlador PID y una interfaz HMI.. 1.2.2. Objetivos Específicos. Realizar el montaje e instalación del sensor de nivel en el tanque de mezcla. Identificar y modelar el comportamiento del tanque de mezcla. Diseñar e implementar los parámetros para el bloque PID del PLC Allen Bradley que cumpla con los criterios del modelamiento. Implementar el sistema de supervisión mediante una interfaz HMI Allen Bradley. Realizar cinco prácticas de laboratorio demostrando el funcionamiento del sistema implementado.. 15.
(16) 2. Marco de Referencia 2.1.. Antecedentes. La planta de procesos análogos PPA es una planta ha sido desarrollada por estudiantes para estudiantes con el fin de ayudar a mejorar los laboratorios de las diferentes carreras de la facultad tecnológica. Es una planta que requiere de mejoramiento en cuanto a instrumentación para el aprovechamiento de prácticas de automatización y control. En el comercio se encuentra plantas de procesos análogos y analíticos como es el caso de Amatrol una empresa que proporciona sistemas educativos de control de procesos para que los estudiantes se familiaricen con las necesidades de la industria moderna, en una de sus plantas didácticas se encuentra el sistema de control del proceso de nivel y flujo la cual cuenta con instrumentación normalmente usada en la industria, permitiendo al estudiante adquirir conocimientos en instrumentación y control de procesos en ambientes industriales. De la tesis “Implementación de un sistema SCADA para la mezcla de dos sustancias en una industria química” se adoptó el método con el que logran que un usuario cualquiera de la industria sea capaz de manejar una interfaz de visualización del proceso y en donde también involucran comunicaciones de campo, adquisición de datos de los sensores, programación de PLC y bases de datos para las variables del OPC. [1] Con base en la tesis “Implementación de un sistema SCADA para el control y monitoreo de 7 ascensores y 8 escaleras eléctricas instaladas en el terminal terrestre de Guayaquil” se infiere en el desarrollo que logran al instalar un sistema de control y monitoreo de siete ascensores y ocho escaleras eléctricas con sus respectivas pantallas de visualización en una PC ya que la tecnología que se utilizó fue un módulo micrologix 1100 de Allen Bradley y en el cual a través del software FactoryTalkSiteEdition se desarrollaron varias pantallas para visualizar el funcionamiento de los ascensores y escaleras eléctricas implementando una red de módulos micrologix 1100 para la transmisión de información. [2] Su desarrollo permitió facilitar el proceso de monitoreo de la estación terrestre de Guayaquil desde un punto remoto para así garantizar un proceso seguro y óptimo de control al sistema. 16.
(17) 3. Metodología 3.1.. Marco Teórico. 3.1.1. Sensor de nivel ultrasónico Su funcionamiento se basa en emitir cíclicamente un impulso acústico de alta frecuencia y corta duración. Este impulso se propaga a la velocidad del sonido por el aire. Al encontrar un objeto, es reflejado y vuelve como eco al sensor ultrasónico. Este último calcula internamente la distancia hacia el objeto, basado en el tiempo transcurrido entre la emisión de la señal acústica y la recepción de la señal de eco. Como la distancia hacia el objeto es medida por medio del tiempo de recorrido del sonido, y no por una medición de la intensidad, los sensores ultrasónicos son insensibles hacia el ruido de fondo. Prácticamente todos los materiales que reflejan el sonido son detectados, independientemente de su color. Aún materiales transparentes o láminas delgadas no presentan problemas para los sensores ultrasónicos. Los sensores ultrasónicos Pepperl Fuchs de referencia UB500-18GM75-I-V15 permiten medir distancias entre 3cm 50cm, pudiendo indicar el valor medido con una precisión de milímetro, gracias a la medición del tiempo de recorrido. Además de esto cumple con un grado de protección IP65 lo cual se traduce en Protección contra el polvo y Protección contra los chorros de baja presión de agua.. Fig. 1 Sensor Pepperl Fuchs UB500-18GM75-I-V15. [4]. 17.
(18) 3.1.2. Sistemas de control 3.1.2.1.. Sistemas no lineales [3]. Un sistema es no lineal si no se aplica el principio de superposición. Por tanto, para un sistema no lineal la respuesta a dos entradas no puede calcularse tratando cada entrada a la vez y sumando los resultados. Aunque muchas relaciones físicas se representan a menudo mediante ecuaciones lineales, en la mayor parte de los casos las relaciones reales no son verdaderamente lineales. De hecho, un estudio cuidadoso de los sistemas físicos revela que incluso los llamados «sistemas lineales» sólo lo son en rangos de operación limitados. En la práctica, muchos sistemas electromecánicos, hidráulicos, neumáticos, etc., involucran relaciones no lineales entre las variables. Por ejemplo, la salida de un componente puede saturarse para señales de entrada grandes. Puede haber una zona muerta que afecte a las señales pequeñas. (La zona muerta de un componente es un rango pequeño de variaciones de entrada a las cuales el componente es insensible.) Puede ocurrir una no linealidad de la ley cuadrática en algunos componentes. Por ejemplo, los amortiguadores que se utilizan en los sistemas físicos pueden ser lineales para operaciones a baja velocidad, pero pueden volverse no lineales a altas velocidades, y la fuerza de amortiguamiento puede hacerse proporcional al cuadrado de la velocidad de operación. Linealización de sistemas no lineales. En la ingeniería de control, una operación normal del sistema puede ocurrir alrededor de un punto de equilibrio, y las señales pueden considerarse señales pequeñas alrededor del equilibrio. (Debe señalarse que hay muchas excepciones a tal caso.) Sin embargo, si el sistema opera alrededor de un punto de equilibrio y si las señales involucradas son pequeñas, es posible aproximar el sistema no lineal mediante un sistema lineal. Este sistema lineal es equivalente al sistema no lineal, considerado dentro de un rango de operación limitado. Tal modelo linealizado (lineal e invariante con el tiempo) es muy importante en la ingeniería de control.. 18.
(19) 3.1.2.2.. Modelamiento de los sistemas [5]. Un sistema representa una unidad donde se hacen tratamientos físicos o químicos de materiales que puede ser contrastada con un modelo que representa una descripción matemática del sistema real. La disposición de varios sistemas unidos entre sí por flujos comunes de materiales y/o información constituye un proceso. El estudio de un proceso, mediante la manipulación de su representación matemática o de su modelo físico, constituye una simulación. Los estudios clásicos de un proceso en estado estacionario se complementan con un análisis dinámico, lo que exige un conocimiento de los criterios de estabilidad y de los métodos de operación para evaluar exitosamente el funcionamiento del proceso. 3.1.2.3.. Método de obtención de modelos. Existen dos métodos principales para obtener el modelo de un sistema: . Modelado Teórico: Se trata de un método analítico, en el que se recurre a leyes básicas de la física para describir el comportamiento dinámico de un fenómeno o proceso.. . Identificación del sistema: se trata de un método experimental que permite obtener el modelo de un sistema a partir de datos reales recogidos de la planta bajo estudio.. El modelado teórico tiene un campo de aplicación restringido a procesos muy sencillos de modelar, o a aplicaciones en que no se requiera gran exactitud en el modelo obtenido. En muchos casos, además, la estructura del modelo obtenido a partir del conocimiento físico de la planta posee un conjunto de parámetros desconocidos y que sólo se pueden determinar experimentando sobre el sistema real. De ahí la necesidad de recurrir a los métodos de identificación de sistemas. 3.1.2.4.. Identificación de los sistemas [6]. Se entiende por identificación de sistemas a la obtención de forma experimental de un modelo que reproduzca con suficiente exactitud, para los fines deseados, las características dinámicas del proceso objeto de estudio. En términos generales, el proceso de identificación comprende los siguientes pasos: 19.
(20) . Obtención de datos de entrada - salida.. . Tratamiento previo de los datos registrados.. . Elección de la estructura del modelo.. . Obtención de los parámetros del modelo.. . Validación del modelo.. Dependiendo de la causa estimada, deberá repetirse el proceso de identificación desde el punto correspondiente. Por tanto, el proceso de identificación es un proceso iterativo. 3.1.2.5.. Tipos de modelos paramétricos. Generalmente los modelos paramétricos se describen en el dominio discreto, puesto que los datos que sirven de base para la identificación se obtienen por muestreo. En el caso de que se requiera un modelo continuo, siempre es posible realizar una transformación del dominio discreto al continuo. La expresión más general de un modelo discreto es del tipo (1): s(t) = h(t) + w(t). (1). Donde w (t) es el término que modela la salida debida a las perturbaciones, h (t) la salida debida a la entrada, y s (t) la salida medible del sistema. Cada uno de estos términos puede desarrollarse de la siguiente forma: h(t) = G(q−1 , θ) × u(t). (2). w(t) = H(q−1 , θ ) × e(t). (3). s(t) = A(q−1 , θ ) × y(t). (4). Donde 𝑞 −1 es el operador retardo, q representa un vector de parámetros, 𝑢(𝑡) y 𝑒(𝑡) son la entrada al sistema y el ruido de entrada al mismo respectivamente 𝑒 𝑦(𝑡) es la salida de interés del sistema (que puede no coincidir con la salida medible). Tanto 𝐺(𝑞 −1 , 𝜃) como 𝐻(𝑞 −1 , 𝜃) son cocientes de polinomios del tipo: 𝐺(𝑞 −1 , 𝜃) =. 𝐵(𝑞 −1 ) 𝑏1 ∙ 𝑞 −𝑛𝑘 + 𝑏2 ∙ 𝑞 −𝑛𝑘−1 + ⋯ + 𝑏𝑛𝑏 ∙ 𝑞 −𝑛𝑘−𝑛𝑏+1 = 𝐹 (𝑞 −1 ) 1 + 𝑓1 ∙ 𝑞 −1 + ⋯ + 𝑓𝑛𝑓 ∙ 𝑞 −𝑛𝑓. 20.
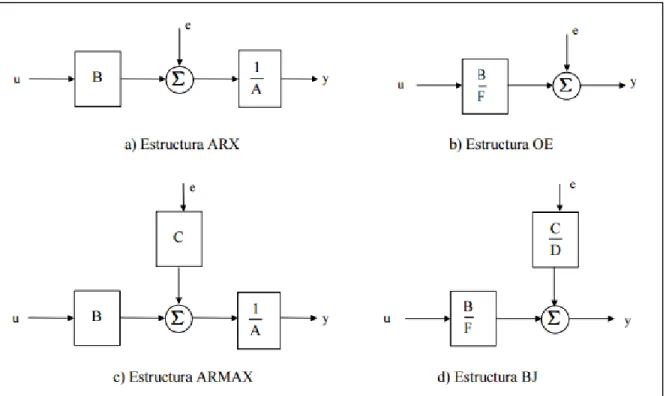
(21) 𝐻(𝑞−1 , 𝜃) =. 𝐶(𝑞−1 ) 1 + 𝑐1 ∙ 𝑞−1 + ⋯ + 𝑐𝑛𝑐 ∙ 𝑞−𝑛𝑐 = 𝐷(𝑞−1 ) 1 + 𝑑1 ∙ 𝑞−1 + ⋯ + 𝑑𝑛𝑑 ∙ 𝑞−𝑛𝑑. (5). Y 𝐴(𝑞 −1 , 𝜃) un polinomio del tipo: 𝐴(𝑞−1 , 𝜃) = 1 + 𝑎1 ∙ 𝑞−1 + ⋯ + 𝑎𝑛𝑎 ∙ 𝑞−𝑛𝑎. (6). El vector de parámetros 𝜃 contiene los coeficientes 𝑎𝑖 , 𝑏𝑖 , 𝑐𝑖 , 𝑑𝑖 y 𝑓𝑖 de las funciones de transferencia anteriores. La estructura genérica de estos modelos es por tanto: 𝐴(𝑞 −1 ) ∙ 𝑦(𝑡) = 𝐺 (𝑞−1 , 𝜃) ∙ 𝑢 (𝑡) + 𝐻(𝑞 −1 , 𝜃) ∙ 𝑒(𝑡) =. 𝐵(𝑞−1 ) 𝐶 (𝑞−1 ) ( ) ∙ 𝑢 𝑡 + ∙ 𝑒(𝑡) 𝐹(𝑞−1 ) 𝐷(𝑞−1 ). (7). Para elegir la estructura de este tipo de modelos hay que determinar el orden de cada uno de los polinomios anteriores, es decir na, nb, nc, nd, nf y el retardo entre la entrada y la salida nk. Una vez elegidos estos valores, sólo queda determinar el vector de coeficientes 𝜃 (𝑎𝑖 , 𝑏𝑖 , 𝑐𝑖 , 𝑑𝑖 y 𝑓𝑖 ) que hacen que el modelo se ajuste a los datos de entrada - salida del sistema real. En muchos casos, alguno de los polinomios anteriores no se incluye en la descripción del modelo, dando lugar a los siguientes casos particulares, entre otros: Tabla 1. Diferentes estructuras de modelos paramétricos.. En la Fig. 2 se muestra el diagrama de bloques equivalente para cada uno de los modelos anteriores.. 21.
(22) Fig. 2 Diagramas de bloques de las estructuras de la tabla 1. La anulación de alguno de los polinomios, resultando estructuras simplificadas, facilita el proceso de ajuste de parámetros. Cada una de las estructuras (ARX, ARMAX, OE o BJ) tiene sus propias características y debe ser elegida fundamentalmente en función del punto en el que se prevé que se añade el ruido en el sistema. En cualquier caso, puede ser necesario ensayar con varias estructuras y con varios órdenes dentro de una misma estructura hasta encontrar un modelo satisfactorio. 3.1.3. Controladores PID [7] 3.1.3.1.. Estructura. En primera instancia considerar un lazo de control con una entrada y una salida (SISO) de un grado de libertad:. 22.
(23) Fig. 3 Diagrama en bloques de un sistema controlado con un PID. [7] Los miembros de la familia de controladores PID, incluyen tres acciones: proporcional (P), integral (I) y derivativa (D). Estos controladores son los denominados P, I, PI, PD y PID. 3.1.3.2.. PID: acción de control proporcional-integral-derivativa. Esta acción combinada reúne las ventajas de cada una de las tres acciones de control individuales. La ecuación de un controlador con esta acción combinada se obtiene mediante: 𝐾𝑝 𝑡 (8) 𝑑𝑒(𝑡) ( ) ( ) ∫ 𝑒(𝜏)𝑑𝜏 + 𝐾𝑝 𝑇𝑑 𝑢 𝑡 = 𝐾𝑝 𝑒 𝑡 + 𝑇𝑖 0 𝑑 (𝑡 ) Y su función transferencia resulta: 𝐶𝑃𝐼𝐷 (𝑠) = 𝐾𝑝 (1 +. 1 + 𝑇𝑑 𝑠) 𝑇𝑖 𝑠. (9). 3.1.4. Modelamiento de sistema tanque cilíndrico Horizontal [8] 3.1.4.1.. Capacitancia. Cuando un líquido es almacenado en un recipiente abierto, existe una relación algebraica entre el volumen del líquido y la presión en la base del recipiente. Si el área de sección transversal del recipiente está dada por la función A (h), donde h es la altura del nivel del líquido sobre la base inferior del recipiente, entonces el volumen del líquido v es la integral del área desde la base del recipiente hasta la altura del nivel del líquido. ℎ. 𝑣 = ∫ 𝐴(𝜆)𝑑𝜆. ( 10 ). 0. Donde 𝜆 es una variable de integración. Por un líquido de densidad 𝜌 expresada en kilogramos por metro cúbico, la presión absoluta y la altura del líquido están relacionadas por: 23.
(24) 𝑝 = 𝜌𝑔ℎ + 𝑝𝑎. ( 11 ). Donde 𝑔 es la constante gravitacional (9.807 𝑚/𝑠 2 ) y donde 𝑝𝑎 es la presión atmosférica, la cual está tomada como 1.013 x 105 𝑁/𝑚2 . En las ecuaciones (10) y (11) implican que para un recipiente geométrico, densidad del líquido, y presión atmosférica, existe una relación algebraica entre la presión 𝑝 y el volumen del líquido 𝑣. Una típica curva característica que describe esta relación es mostrada en la figura 4.. Fig. 4 Presión Vs. Volumen del líquido para un recipiente con sección transversal variable. [8] Si la tangente a la curva de presión-versus-volumen es trazada en algún punto, como se muestra en la figura 4 (b), entonces el recíproco de la pendiente se define para ser la capacitancia hidráulica, denotada por C (h). Como se indica por la h en paréntesis, la capacitancia depende del punto en la curva a ser considerado y la altura del líquido h. Ahora: 1 𝑑𝑣 𝐶 (ℎ ) = = 𝑑𝑝 𝑑𝑝 𝑑𝑣 Y, de la regla de la cadena de diferenciación, 𝐶 (ℎ ) =. 𝑑𝑣 𝑑ℎ 𝑑ℎ 𝑑𝑝. 24.
(25) Se puede ver que 𝑑𝑣/𝑑ℎ = 𝐴(ℎ) de (10) y 𝑑ℎ/𝑑𝑝 = 1/𝜌𝑔 de (11) Así para un depósito de forma arbitraria, que tiene unidades de 𝑚4 ∙ 𝑠 2 /𝑘𝑔 o, equivalentemente 𝑚5 /𝑁. 𝐶 (ℎ ) =. 𝐴 (ℎ ) 𝜌𝑔. ( 12 ). Para un recipiente con área transversal constante A, (10) se reduce a 𝑣 = 𝐴ℎ. Se puede sustituir la altura ℎ = 𝑣/𝐴 en (17) para obtener la presión en términos del volumen: 𝜌𝑔 ( 13 ) 𝑝= 𝑣 + 𝑝𝑎 𝐴 La ecuación (13) muestra una gráfica lineal de presión-versus-volumen, como es mostrado en la figura 5. La pendiente de la línea es el reciproco de la capacitancia C, donde 𝐴 ( 84 ) 𝐶= 𝜌𝑔. Fig. 5 Presión-versus-volumen del líquido para un recipiente con A constante. [8] El volumen del líquido en un depósito a cualquier momento es la integral de la rata de flujo neta en el depósito más el volumen inicial. De donde se puede escribir 𝑡. 𝑣(𝑡) = 𝑣 (0) + ∫ [𝜔𝑖𝑛 (𝜆) − 𝜔𝑜𝑢𝑡 (𝜆)]𝑑𝜆 0. Que puede diferenciarse para obtener la forma alternativa. 25.
(26) 𝑣̇ = 𝜔𝑖𝑛 (𝑡) − 𝜔𝑜𝑢𝑡 (𝑡). ( 95 ). Para obtener las expresiones para la derivada del tiempo de la presión p y la altura del líquido h que es válido para los depósitos con área transversal, se puede utilizar la regla de la cadena de diferenciación para escribir 𝑑𝑣 𝑑𝑣 𝑑ℎ = 𝑑𝑡 𝑑ℎ 𝑑𝑡 Donde 𝑑𝑣/𝑑𝑡 esta dada por (15) y donde 𝑑𝑣/𝑑ℎ = 𝐴(ℎ). Asi la rata de cambio de altura del líquido depende del porcentaje del flujo neto de acuerdo a: 1 [𝜔 (𝑡) − 𝜔𝑜𝑢𝑡 (𝑡)] ℎ̇ = 𝐴(ℎ) 𝑖𝑛. ( 16 ). Alternativamente, se puede escribir el 𝑑𝑣/𝑑𝑡 como 𝑑𝑣 𝑑𝑣 𝑑𝑝 = 𝑑𝑡 𝑑𝑝 𝑑𝑡 Donde 𝑑𝑣/𝑑𝑝 = 𝐶(ℎ). Del porcentaje de cambio de la presión a la base del recipiente es 𝑝̇ =. 1 [𝜔 (𝑡) − 𝜔𝑜𝑢𝑡 (𝑡)] 𝐶 (ℎ) 𝑖𝑛. ( 17 ). Donde 𝐶(ℎ) esta dado por (12) Porque cualquiera de las variables v, h y p puede usarse como una medida de la cantidad de líquido en un recipiente, generalmente se selecciona uno de ellos como una variable de estado. Entonces (15), (16) o (17) podría ser la ecuación variable de estado correspondiente cuando 𝜔𝑖𝑛 y 𝜔𝑜𝑢𝑡 se expresan por lo que se refiere a las variables de entrada y salida. Si el área transversal del recipiente es variable, entonces el coeficiente 𝐴(ℎ) en (16) será una función de h y el modelo del sistema será no lineal. Para desarrollar a un modelo linealizado, se debe encontrar el punto de operación, se deben definir las variables incrementales, y se deben retener los primeros dos términos de la serie de Taylor. Igualmente, el término 𝐶 (ℎ) en (17) causará que la ecuación diferencial sea no lineal porque la capacitancia varía con h que a su vez es una función de la presión. 26.
(27) Si se considera un recipiente formado por un cilindro circular de radio R y longitud L que contiene un líquido de densidad 𝜌 en unidades de kilogramos por metro cúbico, Fig. 6.. Fig. 6 Recipiente cilíndrico. [8] Para encontrar la capacitancia del recipiente mostrado en la Fig. 6 (b) se debe tener en cuenta que el área de sección transversal está en función de la altura del líquido h. se puede verificar que el ancho de la superficie del líquido es 2√𝑅2 − (𝑅 − ℎ)2 , la cual es cero cuando ℎ = 0 y ℎ = 2𝑅, y la cual tiene un valor máximo de 2𝑅 cuando ℎ = 𝑅. Se puede determinar que la capacitancia entonces es: 2𝐿 𝐶𝑏 = √𝑅2 − (𝑅 − ℎ)2 𝜌𝑔 La cual se muestra en la Fig. 7.. Fig. 7 Capacitancia del recipiente cilíndrico horizontal. [8]. 27. ( 18 ).
(28) 3.1.4.2. Resistencia Cuando un fluido líquido atraviesa una tubería, hay una caída en la presión del líquido debido a la longitud del ducto. Hay una pérdida de presión igualmente si el fluido liquido atraviesa una válvula o un orificio. El cambio en la presión es asociada con la dispersión de energía encontrada en los fluidos líquidos y normalmente obedece a una no linealidad, entre la relación algebraica del porcentaje de flujo 𝜔 y la diferencia de presión ∆𝑝. El símbolo para una válvula se muestra en la Fig. 8, y también puede ser considerada como otro elemento de la disipación de energía.. Fig. 8 Símbolo de una válvula hidráulica. [8] Un valor positivo de 𝜔 indica que el liquido está fluyendo en la dirección de la flecha, mientras un valor positivo de ∆𝑝 indica que la presión marcada al final + es más alto que la presión del otro lado. 𝜔 = 𝑘√∆𝑝. ( 10 ). La expresión describe un orificio y una válvula y es una buena aproximación para el flujo turbulento a través de los ductos. Se puede tratar todas las situaciones de interés la ley de elemento de no lineal de (19). En esta ecuación, 𝑘 es una constante que depende de las características del ducto, válvula, u orificio. Una curva típica de porcentaje de flujo contra la diferencia de presión se muestra en la Fig. 9.. Fig. 9 (a) flujo-versus-diferencia de presión dada por (19). (b) interpretación geométrica de la resistencia hidráulica. [8]. 28.
(29) Ya que (19) es una relación no lineal, se debe linealizar sobre un punto de operación para desarrollar un modelo lineal de un sistema hidráulico. Si se traza la tangente a la curva de 𝜔 contra ∆𝑝 en el punto de operación, el reciproco de su pendiente se define como la resistencia hidráulica R. la figura 9 (b) ilustra la interpretación geométrica de la resistencia que tiene unidades de 𝑛𝑒𝑤𝑡𝑜𝑛 − 𝑠𝑒𝑔𝑢𝑛𝑑𝑜𝑠 𝑝𝑜𝑟 𝑚𝑒𝑡𝑟𝑜5 . Extendiendo (19) en una serie de Taylor sobre el punto de operación se tiene 𝑑𝜔 𝜔=𝜔 ̅+ | (∆𝑝 − ̅̅̅̅ ∆𝑝) + ⋯ 𝑑∆𝑝 ̅̅̅̅ ∆𝑝 Se puede expresar la resistencia R en términos de cualquiera de los dos ̅̅̅̅ ∆𝑝 o 𝜔 ̅ llevando a cabo la diferenciación requerida que usa (19) Específicamente 1 1 𝑑 𝑘 = (𝑘∆𝑝2 )| = 𝑅 𝑑 ∆𝑃 ̅̅̅̅ ∆𝑝 2√∆𝑝 Realizando la sustitución y simplificaciónse obtiene una ecuación alternativa para la resistencia hidráulica como 𝑅=. 2𝜔 ̅ 𝑘2. ( 11 ). Ya que los líquidos típicamente fluyen a través de redes compuestas por válvulas, ductos y orificios se deben combinar a menudo varias relaciones de (19) en una sola expresión equivalente. Desde que se usa el modelo linealizado en muchos de los análisis de los sistemas hidráulicos, es importante desarrollar las reglas para combinar las resistencias de elementos linealizados que aparecen en las configuraciones serie y paralelo. 3.1.4.3. Fuentes En la mayoría de sistemas hidráulicos, la fuente de energía es una bomba que deriva su poder de un motor eléctrico. Aquí se considera la bomba centrifuga manejada a una velocidad constante que se usa ampliamente en los procesos químicos. La representación simbólica de una bomba se muestra en la Fig. 10 se muestran las relaciones de entrada-salida para una bomba centrifuga manejada a tres diferentes velocidades constantes mostradas en la Fig. 11 (a) las curvas de la bomba ∆𝑝 contra 𝜔 son. 29.
(30) Fig. 10 Representación simbólica de una bomba. [8]. Fig. 11 Curvas típicas de una bomba centrifuga donde ∆𝑝 = 𝑝2 − 𝑝1. (a)Por tres diferentes velocidades de la bomba (𝜔1 < 𝜔2 < 𝜔3 ). (b)Mostrado la aproximación lineal. [8]. Determinadas experimentalmente bajo las condiciones del estado continuo y realmente se determina que no es lineal. Para incluir una bomba manejada a velocidad constante en un modelo dinámico lineal, se debe determinar el punto de operación para la velocidad de la bomba particular calculando los valores de ̅̅̅̅ ∆𝑝 y 𝜔 ̅. Entonces se encuentra la pendiente de la tangente a la curva de la bomba al punto de operación y lo define como – 𝐾, la cual tiene unidades de 𝑛𝑒𝑤𝑡𝑜𝑛 − 𝑠𝑒𝑔𝑢𝑛𝑑𝑜𝑠 𝑝𝑜𝑟 𝑚𝑒𝑡𝑟𝑜5 . Habiendo hecho esto, se puede expresar la diferencia de ̂ en términos de la rata de flujo incremental 𝜔 presión incremental ∆𝑝 ̂ como ̂ = −𝐾𝜔 ∆𝑝 ̂. ( 12 ). Donde la constante 𝐾 es siempre positiva, resolviendo (21) para 𝜔 ̂, se tiene 1 ( 13 ) ̂ 𝜔 ̂ = − ∆𝑝 𝐾 La Fig. 11 (b) ilustra la relación de la aproximación lineal a la curva no lineal de la bomba. Se puede escribir la expansión de la serie de Taylor para unan bomba manejada a una velocidad constante como. 30.
(31) 𝜔=𝜔 ̅+. 𝑑𝜔 ̅̅̅̅) + ⋯ | (∆𝑝 − ∆𝑝 𝑑 ∆𝑝 ̅̅̅̅ ∆𝑝. Donde el coeficiente (𝑑𝜔/𝑑 ∆𝑝)|∆𝑝 ̅̅̅̅ es la pendiente de la tangente a la curva de 𝜔 contra ∆𝑝, medido en el punto de operación, y tiene el valor de −1/𝐾. El segundo término de orden superior en la expansión y usando las variables incrementales 𝜔 ̂ ̂ , se obtiene la relación lineal (22). versus ∆𝑝 3.2.. Descripción general de la planta PPA.. La Planta PPA está compuesta por tres tanques de distintos tamaños y formas, el tanque TK-101 de forma cilíndrica y los tanques TK-102 y TK-103 de forma cubica. Se encuentran interconectados por ductos que permiten por medio de una bomba y un motor trifásico hacer circular líquido de manera que en los tanques TK-102 y TK103 se tengan dos líquidos con características contrarias es decir Frio-Caliente, Acido-Base, etc. de manera que se pueda realizar la mezcla hacía el tanque TK101 y por medio de sensores y todo tipo de instrumentación industrial poder realizar ya sean sistemas de control o sistemas analíticos. En el panel de control y circuito eléctrico se tiene un conjunto de equipos cableados y conectados a borneras de conexión ya sean de salida o entrada para facilitar al usuario el uso de esta planta. Dentro de los equipos se tienen: Variador de velocidad PowerFlex40, PLC L23EQB1B, Switch Ethernet STRATIX 2000, Módulo Análogo Compact I/O IF4, Fuente DC IDEC 30W, Guarda Motor, todo del provedor fabricante Rockwell Automation – Allen Bradley. Ver Anexo1. El tanque al cual se le realizará el sistema SCADA con su respectivo modelamiento, identificación y control es el tanque de mezcla TK-101. En la Fig. 12 se puede ver el diagrama de instrumentación y tubería de la panta PPA.. 31.
(32) Fig. 12 Diagrama P&ID de la planta PPA. [Fuente el autor] 3.3. Caracterización del sensor [14] En la instrumentación industrial es importante tener claro conceptos básicos para el manejo y análisis de sensores en un ambiente industrial. La metrología es la ciencia de las medidas cuyo estudio comprende los patrones, las magnitudes y los sistemas de unidades, estudia la fiabilidad de la relación establecida entre cualquier magnitud y su patrón. La medición es el “proceso por el cual se asignan números o símbolos a atributos de entidades del mundo real de tal forma que los describa de acuerdo con reglas o patrones claramente definidos" A continuación se realiza el cálculo de algunos factores que afectan la medición del sensor ultrasónico en el tanque cilíndrico horizontal de la planta PPA.. 32.
(33) Rango Conjunto de valores de la variable medida que están comprendidos dentro de los limites superior e inferior de la capacidad de medida. El rango del sensor en cm es de 3 a 37.5cm. Zona muerta Es el campo de valores de la variable que no hace variar la indicación o señal de salida del instrumento, es decir que no produce respuesta para el caso del sensor utilizado es la zona de 0 a 3 cm. Span Span o alcance es la diferencia algebraica entre los valores superior e inferior del campo de medición del instrumento 𝑆𝑝𝑎𝑚 = 𝑚𝑎𝑥 − 𝑚𝑖𝑛. ( 14 ). 𝑆𝑝𝑎𝑚 = 37.5 − 3 = 34.5 Desviación dada por el fabricante 𝜎 = 1% = 0.01 Histéresis Resultado más alto de la diferencia que se observa en la señal de salida del instrumento para el mismo valor del campo de medida cuando la variable recorre la escala en los dos sentidos ascendente y descendente. ℎ = ±|𝑥𝑎𝑠𝑐 − 𝑥𝑑𝑒𝑠𝑐 |. ( 15 ). ℎ = ±|9.67[𝑚𝐴] − 9.43[𝑚𝐴]| ℎ = ±0.24% Sensibilidad Es la razón de cambio entre el incremento de la lectura y el incremento de la variable que lo ocasiona, después de haberse alcanzado el estado de reposo sin oscilaciones en el tanque.. 33.
(34) (𝑖1 − 𝑖2 ) 𝑖𝑚𝑎𝑥 − 𝑖𝑚𝑖𝑛 𝛼= (ℎ1 − ℎ2 ) ℎ𝑚𝑎𝑥. ( 16 ). (9.47 − 7.15)[𝑚𝐴] (20 − 4)[𝑚𝐴] 𝛼= (15 − 10)[𝑐𝑚] 37.5[𝑐𝑚] 𝛼 = ±1.0875 Varianza 𝑁. 𝑠ℎ20. 1 𝐼𝑖 − 𝑏 ∑( = − ℎ0 ) 𝑁−2 𝑚. ( 17 ). 𝑖=1. 𝑁. 𝑠ℎ20. 1 𝐼𝑖 − 2.5407 = ∑( − ℎ0 ) 71 − 2 0.4657 𝑖=1. 𝑠ℎ20 = 0.01300649. Error de Linealidad 𝑒𝑙 = 1 − 𝑅2. ( 18 ). 𝑒𝑙 = 1 − 0.9999 = 0.0001 Para realizar los cálculos de repetitibilidad, precisión, error sistemático bias, factor de corrección y exactitud, se realiza la toma de datos en varios puntos del tanque cilíndrico por medio de la regleta en la parte lateral del tanque que servirá de patrón de medición y la medición se publicara en la pantalla HMI, obteniendo la siguiente tabla. Tabla 2 Datos tomados para la caracterización del sensor. Patrón [cm] medición 1 medición 2. 5 10 15 20 25 30 32,5 35 37,5 5,02 10,06 15,19 20,33 25,43 30,62 33,18 35,65 37,98 5,04 10,14 15,2 20,22 25,45 30,63 33,16 35,64 38,02 34.
(35) medición 3 medición 4 medición 5 medición 6 medición 7 medición 8 medición 9 medición 10. 5,05 5,03 5,06 5,01 5,06 5,02 5,04 5,03. 10,1 10,15 10,13 10,12 10,11 9,89 10,12 10,11. 15,12 15,18 15,16 15,12 15,06 15,1 15,2 15,13. 20,44 20,35 20,36 20,35 20,22 20,27 20,19 20,2. 25,32 25,46 25,4 25,39 25,4 25,41 25,4 25,39. 30,64 30,61 30,58 30,55 30,57 30,54 30,55 30,56. 33,17 33,12 33,18 33,17 33,19 33,16 33,2 33,19. 35,63 35,64 35,62 35,63 35,62 35,61 35,62 35,6. 37,99 38,03 38,02 37,99 37,96 37,93 37,95 38,04. Repetitibilidad Es la capacidad de reproducción de la señal de salida del instrumento al medir repetidamente valores idénticos de la variable en las mismas condiciones de servicio y en el mismo sentido de variación. ∑(𝑥𝑖 − 𝑥)2 𝑟𝑒𝑝𝑒𝑡𝑖𝑡𝑖𝑏𝑖𝑙𝑖𝑑𝑎𝑑 = √ 𝑁. ( 19 ). 20.2329 𝑟𝑒𝑝𝑒𝑡𝑖𝑡𝑖𝑏𝑖𝑙𝑖𝑑𝑎𝑑 = √ 100 𝑟𝑒𝑝𝑒𝑡𝑖𝑡𝑖𝑏𝑖𝑙𝑖𝑑𝑎𝑑 = ± 0.44980996 Precisión 𝑛. 1 ∑(𝑥𝑖 − 𝑥̅ )2 𝑠 = 𝑛−1 2. ( 20 ). 𝑖=1 𝑛. 1 ∑(𝑥𝑖 − 𝑥̅ )2 ) 𝑠 = √( 𝑛−1. ( 21 ). 𝑖=1. Donde 𝑛. 1 𝑥̅ = ∑ 𝑥𝑖 𝑛 𝑖=1. Se calcula el promedio para los patrones seleccionados. 35. ( 22 ).
(36) 10. 1 𝑥̅ = ∑ 𝑥𝑖 10 𝑖=1. 𝑛. 1 1 𝑠2 = ∑(𝑥𝑖 − 𝑥̅ )2 = ∗ 1.30489 𝑛−1 100 − 1 𝑖=1. 𝑠 2 = 0.01318071 𝑠 = ±0.11480726% Error Sistemático Error que se produce en una dirección, de modo igual en todas las mediciones y provoca un desplazamiento (Bias) de la medida del sensor. 𝑥̅ − 𝑥𝑡 ∗ 100% 𝑥𝑡. 𝐵=. ( 23 ). Error sistemático para 20 cm 𝐵=. 20.293 − 20 ∗ 100% = ±1.465% 20. Media aritmética error sistemático 10. 𝐵̅ =. 1 ∑ 𝐵𝑖 = ±2.715726374% 10 𝑖=1. Factor de corrección 𝐹𝐵 =. 1 𝐵 1 + 100. Factor de corrección para 20 cm 𝐹𝐵 =. 1 = 0.98556152 1.465 1 + 100. Media aritmética Factor de corrección 10. ̅̅̅ 𝐹𝐵 =. 1 ∑ 𝐹𝐵 𝑖 = 0.974837238 10 𝑖=1. 36. ( 24 ).
(37) Exactitud Es la cualidad de un instrumento de medida por la que tiende a dar lecturas próximas al verdadero valor de la magnitud medida. 𝐴𝐶𝐶 = 𝐵 ± √𝑆𝑃2 +. ( 25 ). 𝑆𝑃2 𝑛. (𝐵√𝑛) 2 𝐴𝐶𝐶 = 𝐵 ± √(𝐵√𝑛) + 𝑛. ( 26 ). 2. 2. (0.72√10) 2 𝐴𝐶𝐶5 = 0.72 ± √(0.72√10) + 10 Exactitud en 5cm 𝐴𝐶𝐶5 = 0.72 ± 2.387969849 𝐴𝐶𝐶5+ = 3.107969849 𝐴𝐶𝐶5− = −1.667969849. 𝐴𝐶𝐶5 = −1.667969849% 𝑎 3.107969849% 𝑑𝑒 𝑒𝑟𝑟𝑜𝑟 Tabla 3 Datos de caracterización del sensor. [Fuente el autor] Patrón [cm] Repetitibilidad [±%] promedio Precisión (s) [±%] Error sistemati bias (B%) factor correc (FB) sp. 5. 10. 15. 20. 25. 30. 32,5. 35. 37,5. 0,03. 0,11. 0,15. 0,30. 0,40. 0,58. 0,67. 0,62. 0,49. 5,03. 10,09. 15,14. 20,29. 25,40. 30,58. 33,17. 35,62. 37,99. 0,01. 0,07. 0,04. 0,08. 0,03. 0,03. 0,02. 0,01. 0,03. 0,72. 0,93. 0,97. 1,46. 1,62. 1,95. 2,06. 1,78. 1,30. 0,99 2,94 -2.15% A 4.01%. 0,99 3,07 -2.25% A 4.2%. 0,98 4,63 -3.39% A 6.32%. 0,98 5,12 -3.75% A 6.99%. 0,98 6,16 -4.51% A 8.41%. 0,97 6,53 -4.79% A 8.92%. 0,98 5,65 -4.14% A 7.72%. 0,98 4,14 -3.03% A 5.65%. 0,99 2,27 -1.66% Exactitud(ACC) A 3.1%. Factores en todo el rango ± 0.44% ----------±0.11% ±2.71%. 0.97 ----------Con respecto al error. 3.3.1. Descripción del Sensor ultrasónico Las curvas de respuesta muestran que la onda ultrasónica se expande 25cm, en donde se observa que hay un mejor transito del cono acústico en el rango de 0-5 cm, lo cual nos indica un dato importante para realizar la instalación del sensor.. 37.
(38) Fig. 13 Sensor ultrasónico UB500-. Fig. 14 Conector 5 pines V15-G-2M-. 18GM75-I-V15. [Fuente el autor]. PVC. [Fuente el autor]. 3.3.2. Instalación y calibración del sensor ultrasónico Como se puede apreciar en la Fig. 15 se realiza la instalación del sensor en el tanque de mezcla colocando el sensor en el lado opuesto de la tubería de entrada de caudal con el fin de que las oscilaciones causantes del caudal de entrada al agua almacenada generen el mínimo ruido en la respuesta del sensor.. Fig. 15 Instalación del sensor. [Fuente el autor] El sensor cuenta con una entrada de aprendizaje como se muestra en la Fig. 16 para configurar el sensor a la altura del tanque. De modo que quede como rampa descendente el procedimiento es el siguiente:. 38.
(39) . Coloque el objetivo en el extremo más alejado del rango de evaluación deseado.. . Programe el límite de evaluación aplicando -UB a la entrada de aprendizaje (el LED amarillo parpadea).. . Desconecte la entrada de aprendizaje de -UB para guardar el límite de evaluación.. . Coloque el objetivo en el extremo más próximo del rango de evaluación deseado.. . Programe el límite de evaluación aplicando +UB a la entrada de aprendizaje (el LED amarillo parpadea).. . Desconecte la entrada de aprendizaje de +UB para guardar el límite de evaluación.. Fig. 16 Diagrama de conexión del sensor. [4] En las Fig. 17 y 18 se puede observar el valor de corriente entregado por el sensor ya calibrado para un nivel máximo y mínimo en el tanque de mezcla.. 39.
(40) Fig. 17 Respuesta en corriente del sensor en el punto máximo. [Fuente. Fig. 18 Respuesta en corriente del sensor en el punto mínimo. [Fuente el. el autor]. autor]. 3.4.. Modelamiento. 3.4.1. Modelamiento del sensor El sensor ultrasónico es un transductor de altura a corriente siendo altura la entrada del sensor y la salida corriente de modo que como se puede apreciar en la Fig. 19 se representa el diagrama de bloques del sensor.. Fig. 19 Diagrama de bloques del sensor ultrasónico. [Fuente el autor] Para realizar el modelamiento del sensor se conecta el multímetro en la salida del sensor y tomando datos de nivel cada [5mm] tanto de manera ascendente como descendente y repite el proceso 3 veces, luego de esto se promedian los datos. En la tabla 4 se observan los datos de altura, corriente y valor CH2 que es el dato que toma el modulo análogo del PLC y representa la variación del sensor.. 40.
(41) Altura [cm] 20 20.5 21 21.5 22 22.5 23 23.5 24 24.5 25 25.5 26 26.5 27 27.5 28 28.5 29 29.5 30 30.5 31 31.5 32 32.5 33 33.5 34 34.5 35 35.5 36 36.5 37 37.5. Tabla 4 Datos tomados con el sensor ultrasónico. [Fuente el autor] Altura [cm] 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 15 15.5 16 16.5 17 17.5 18 18.5 19 19.5. Corriente [mA] 4 4.04 4.21 4.45 4.7 4.94 5.15 5.35 5.57 5.8 6.02 6.25 6.48 6.72 6.94 7.13 7.41 7.65 7.85 8.11 8.39 8.55 8.78 9.01 9.24 9.47 9.71 9.95 10.2 10.44 10.65 10.87 11.11 11.37 11.6. valor CH2 6221 6280 6566 6922 7314 7650 8010 8225 8647 8984 9383 9722 10093 10414 10789 11106 11558 11927 12203 12595 12879 13250 13645 13985 14338 14756 15102 15422 15821 16188 16563 16873 17254 17689 18034. 41. Corriente [mA] 11.81 12.05 12.26 12.51 12.72 12.96 13.23 13.43 13.71 13.9 14.18 14.41 14.63 14.89 15.12 15.33 15.6 15.81 16.04 16.32 16.53 16.75 17 17.26 17.46 17.71 17.94 18.18 18.4 18.65 18.89 19.13 19.34 19.58 19.82 20. valor CH2 18360 18734 19029 19478 19776 20136 20577 20927 21305 21612 21997 22417 22754 23167 23503 23875 24229 24528 24962 25327 25722 26036 26405 26827 27081 27543 27888 28244 28631 28974 29363 29743 30050 30447 30800 31090.
(42) Con los datos de la tabla 4 se procede a graficar y se observa el comportamiento encontrando que el sensor tiene una respuesta lineal, así que se realiza una regresión lineal.. Fig. 20 Gráfica de datos Altura vs. Corriente. [Fuente el autor] Como el sensor inicia en 4mA el punto de corte con el eje de la corriente no se encuentra en cero así que el modelo del sensor es una ganancia de 0.4657 sumada de una constante de 2.5407, teniendo la siguiente ecuación lineal. 𝐶𝑜𝑟𝑟𝑖𝑒𝑛𝑡𝑒 = (0.4657 × 𝑎𝑙𝑡𝑢𝑟𝑎 ) + 2.5407. ( 27 ). Para simular las oscilaciones del agua cuando ingresa caudal se le suma un ruido blanco a la señal de corriente de 0.1%. El fabricante del sensor proporciona el tiempo de retardo de respuesta del sensor que se tendrá en cuenta en el modelo del sensor. Para ello en la entrada del sensor se le asigna un tiempo de muestreo de 50ms. Tabla 5 Datos técnicos del sensor ultrasónico. [4]. 42.
(43) El modelo en diagrama de bloques generado en simulink de MATLAB para el sensor será el siguiente:. Fig. 21 Diagrama de bloques en simulink del modelo del sensor ultrasónico. [Fuente el autor] Se crea un subsistema del modelo del sensor para expresarlo como un bloque que internamente tiene el modelo esto con el fin de obtener al final un diagrama organizado y de fácil interpretación; se comprueba el modelo ingresando diferentes entradas y verificando que el la salida concuerde con la de la tabla de altura vs corriente. 3.4.2. Modelamiento del tanque cilíndrico horizontal Para realizar el modelamiento del tanque se debe tener en cuenta la influencia de la presión vertical de un fluido (presión hidrostática) en un tanque en función de la altura la cual se expresa con la siguiente ecuación: 𝑑𝑝 = 𝜌 × 𝑔 × 𝑑ℎ. ( 28 ). La capacitancia hidráulica es la inversa de la variación de la presión con respecto al volumen (38). 𝐶 (ℎ ) =. 1 𝑑𝑣 𝑑𝑣 𝑑ℎ = = 𝑑𝑝 𝑑𝑝 𝑑ℎ 𝑑𝑝 𝑑𝑣. 43. ( 29 ).
(44) Teniendo en cuenta que el volumen para el tanque cilíndrico horizontal se puede expresar como el diferencial del área por el diferencial de altura se tiene que: 𝑑𝑣 𝑑ℎ Reemplazando (39) en (38) se tiene que:. ( 30 ). 𝑑𝐴 =. 𝐶 (ℎ) = 𝑑𝐴 ×. 𝑑ℎ 𝑑𝑝. ( 31 ). Reemplazando (38) en (40) se obtiene 𝑑ℎ 𝑑𝐴 ( 32 ) = 𝜌 ∙ 𝑔 ∙ 𝑑ℎ 𝜌 ∙ 𝑔 Ahora se debe expresar en términos de altura el área ya que la capacitancia está en función de la altura. En la Fig. 22 se muestra el tanque cilíndrico con un nivel de agua h y cuya área transversal es L1 multiplicado por la longitud del tanque L de 𝐶 (ℎ) = 𝑑𝐴 ×. 68[cm]. 𝐴 = 𝐿1 × 𝐿. ( 33 ). También se observa un triángulo rectángulo formado por (L1/2), (r-h) y (r) a este se le aplicara el teorema de Pitágoras para obtener L1 en términos de la altura.. Fig. 22 Dimensión del tanque cilíndrico, vista frontal y lateral respectivamente. [Fuente el autor] 𝐿1 2 𝑟 = ( ) + (𝑟 − ℎ )2 2. ( 34 ). 𝐿1 = √ 𝑟 2 − (𝑟 − ℎ )2 2. ( 35 ). 2. 44.
(45) 𝐿1 = 2 × (√ 𝑟 2 − (𝑟 − ℎ)2 ). ( 36 ). Reemplazando (45) en (42) 𝐴 = 2 × 𝐿 × (√ 𝑟 2 − (𝑟 − ℎ)2 ). ( 37 ). Vista la ecuación del área transversal del tanque cilíndrico (46), en diagrama de bloques quedara de la siguiente manera:. Fig. 23 Diagrama de bloques del modelo del tanque cilíndrico. [Fuente el autor] Con la variación del área se debe reemplazar en (51). 𝐶 (ℎ ) =. 2 × 𝐿 × (√ 𝑟 2 − (𝑟 − ℎ)2 ). ( 38 ). 𝜌×𝑔. El modelamiento de un sistema hidráulico de nivel de un tanque se puede realizar por medio del principio de medición de presión (58). 𝑑𝑝 1 = (𝑞 (𝑡) − 𝑞𝑜 (𝑡)) 𝑑𝑡 𝐶 𝑖. ( 39 ). Con sensor de nivel ultrasónico se usa la altura como principio de medición, el modelamiento para el tanque cilíndrico aplicando la ecuación de continuidad de un fluido, donde v es la variación de altura con respecto al tiempo. 𝑄 = 𝐴1 × 𝑣1 = 𝐴2 × 𝑣2. 45. ( 40 ).
(46) 𝑄 =𝐴×. 𝑑ℎ 𝑑𝑡. ( 41 ). En el modelo hidráulico de la Fig. 24 se observa un caudal de entrada y uno de salida tal como se comporta el tanque cilíndrico de la planta PPA, aplicando la ley de continuidad al sistema hidráulico se obtiene (51).. Fig. 24 Modelo hidráulico tanque con una entrada y una salida. [3] 𝑑ℎ 1 = (𝑞 (𝑡) − 𝑞𝑜 (𝑡)) 𝑑𝑡 𝐴 𝑖. ( 42 ). Reemplazando el área de (46) se obtiene la ecuación diferencial que modela el sistema hidráulico del tanque cilíndrico horizontal. (𝑞𝑖 (𝑡) − 𝑞𝑜 (𝑡)) 𝑑ℎ = 𝑑𝑡 2 × 𝐿 × (√ 𝑟 2 − (𝑟 − ℎ)2 ). ( 43 ). Representando el modelo del tanque cilíndrico horizontal en diagrama de bloques mostrado en la Fig. 25.. 46.
(47) Fig. 25 Diagrama de bloques del modelo del tanque cilíndrico. [Fuente el autor] El siguiente paso es modelar la válvula (HA-106) La cual se comporta como una resistencia hidráulica afectando el caudal de salida.. Fig. 26 Sistema hidráulico del tanque cilíndrico horizontal de la planta PPA. [Fuente el autor] Como la planta no cuenta con un medidor de flujo se decide realizar la medición de volumen de vaciado del tanque en función de la altura para luego realizar el cálculo del caudal. Se parte de (53) la cual describe el volumen de un líquido en un tanque cilíndrico horizontal en términos de la longitud del arco (S), el radio (r) y la longitud del tanque cilíndrico (L). 47.
(48) 𝑉 = 𝐿 × ((𝑆 × 𝑟) − (𝑥 × 𝑦)). ( 44 ). Se usa la fórmula de longitud de arco (54) para reemplazar en (53) obteniendo (55). 𝑆 =𝑟 ×𝜃. ( 45 ). 𝑉 = 𝐿 × ((𝑟 × 𝜃 × 𝑟) − (𝑥 × 𝑦)). ( 46 ). Fig. 27 Vista frontal del tanque cilíndrico. [Fuente el autor] Aplicando trigonometría en la Fig. 27 vista frontal del tanque cilíndrico y dejando la ecuación en terminos de altura se obtiene: 𝑟−ℎ 𝑟−ℎ 𝑉 = 𝐿 × ((𝐴cos ( ) × 𝑟 2 ) − ((𝑟 − ℎ ) × 𝑟 × sin (𝐴cos ( )))) 𝑟 𝑟. 3.4.2.1.. ( 47 ). Experimento - Descarga del tanque cilíndrico -. Para la realización de este experimento se dan condiciones iniciales a la planta lo primero es llevar el nivel a el máximo 37.5cm, en el trend 1 de RSLogix 5000 se graficará el nivel en [cm] y el volumen en litros, se debe iniciar a tomar datos y abrir la válvula de salida del tanque con el fin analizar el comportamiento y tomar información de la respuesta de la válvula. En la tabla 6 se ven representados estos datos.. 1. Los trend o tendencias son una herramienta de RSLogix5000 para representar gráficamente a modo de osciloscopio o analizador lógico cualquier variable a la que se tenga acceso en el PLC.. 48.
(49) Al finalizar el experimento se guardan el registro de los datos en formato (.csv). Con los datos tomados se realiza una gráfica de nivel vs tiempo. Comportamiento de la válvula es el mostrado en la Fig. 28. Tabla 6 Datos Nivel vs. Volumen. [Fuente el autor] tiempo (s) 0 1 2 3 4 5 6 7 8 9 10. nivel (cm) volumen (cm3) 37,753498 93960,052 37,630299 93708,549 37,616299 93679,825 37,550499 93544,472 37,526699 93495,354 37,491699 93422,981 37,4217 93277,725 37,3629 93155,174 37,3391 93105,438 37,2691 92958,679 37,2523 92923,37. Fig. 28 Gráfica descarga del tanque Nivel vs. Tiempo. [Fuente el autor]. El tiempo de descarga del tanque es de 1015 segundos, dado en minutos la descarga es de 16.9167. Con los datos obtenidos por medio de RSLogix5000 se realiza el cálculo del caudal tomando deltas de volumen y deltas de tiempo. 𝑞0 =. ∆𝑉 ∆𝑡. Ese cálculo se realiza en Excel de la siguiente manera:. En la tabla 7 se puede apreciar los datos obtenidos.. 49. ( 48 ).
(50) Tabla 7 Caudal calculado. [Fuente el autor] tiempo (s) 0 1 2 3 4 5 6 7 8 9 10. nivel (cm) volumen (cm3) 37,753498 93960,052 37,630299 93708,549 37,616299 93679,825 37,550499 93544,472 37,526699 93495,354 37,491699 93422,981 37,4217 93277,725 37,3629 93155,174 37,3391 93105,438 37,2691 92958,679 37,2523 92923,37. caudal out (cm3/s) 98,6042 98,6042 102,96785 101,8654 101,25045 103,31955 102,84155 101,66435 107,7129 99,13175 107,02625. Se realiza la gráfica de caudal de salida vs altura con el fin de hallar la pendiente la cual es la resistencia, esta aproximación lineal se basa en que la curva real no difiere mucho de su línea tangente si la condición de operación no varía mucho. Con el concepto anterior se realiza la gráfica caudal vs nivel, se le realiza un filtrado y se realiza una regresión lineal encontrando que la resistencia turbulenta es de 0.9644.. Fig. 29 Gráfica de Caudal Vs. Nivel. [Fuente el autor] Dada la ecuación que la pendiente es igual a la resistencia turbulenta se puede modelar la válvula como una ganancia, luego se ingresa el caudal de salida en el modelo de simulink.. 50.
(51) 𝑄=. 2𝐻 2𝐻 = 𝑅𝑡 0.9644. ( 49 ). Para comprobar el comportamiento se compara el modelo de simulink con los datos reales de la planta PPA obteniendo la gráfica de la Fig.30.. Fig. 30 Gráfica de comparación de datos entre reales y simulados. [Fuente el autor] Como el modelo de simulink no es similar al modelo de la planta, se modelará con la ecuación lineal que relaciona caudal con altura correspondiente al modelo de la resistencia de la válvula.. Fig. 31 Gráfica de nivel vs. Caudal de salida. [Fuente el autor]. 51.
(52) 𝑞0 = 1.0149 (ℎ ) + 68.672. ( 50 ). Fig. 32 Modelo lineal relacionada entre altura y caudal. [Fuente el autor] Realizando el cambio del modelo de la bomba se obtiene una mejor respuesta como se observa en la Fig. 33.. Fig. 33 Modelamiento de la válvula. [Fuente el autor]. El modelo hidráulico del tanque cilíndrico expresa la dinámica del caudal que proporciona la bomba y el caudal de salida por la válvula respecto a la altura en la Fig. 34 se puede ver el diagrama de bloques del modelo final del tanque cilíndrico.. 52.
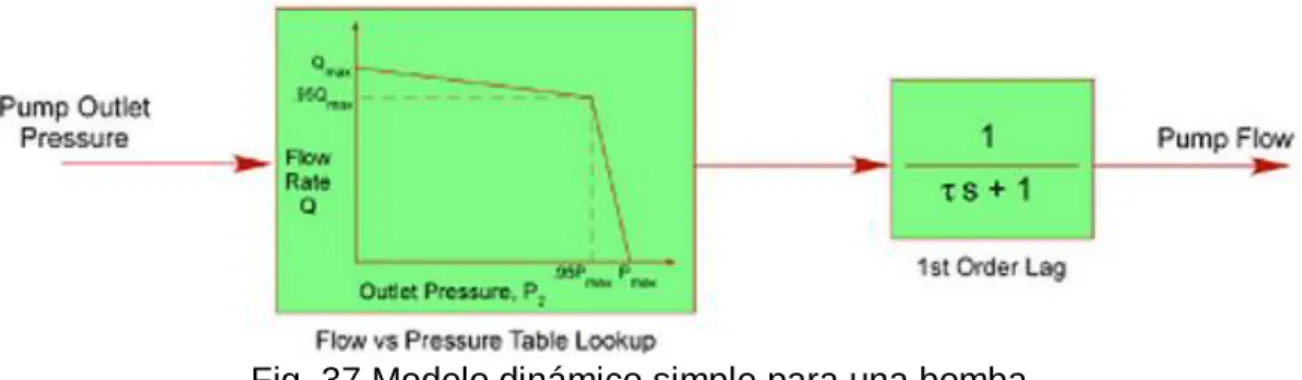
(53) Fig. 34 Diagrama de bloques del modelo final del tanque cilíndrico. [Fuente el autor] 3.4.3. Modelamiento bomba Para realizar el modelamiento de la bomba se define como entrada una variable de tipo entero (VARIADOR:O:FreqCommand) que está relacionada con la frecuencia que le inyecta al variador de velocidad PowerFlex 40 multiplicada por 10, la frecuencia de trabajo del variador tiene un rango de (0-60Hz), siendo 60Hz la máxima velocidad.. Fig. 35 Bloque para leer la variable de frecuencia en RSLogix 5000. [Fuente el autor] La energía inyectada por la variable (VARIADOR:O:FreqCommand) al motor por medio del variador es convertida en un movimiento circular que hace mover el impeler de la bomba y así obtener a la salida un caudal que alimentará al tanque cilíndrico.. 53.
(54) Fig. 36 Diagrama de bloques del sistema actuador. [Fuente el autor] Un modelo dinámico para una bomba se puede realizar de manera compleja o de manera simple, se realiza un modelo complejo cuando se está diseñando una bomba o cuando se está analizando un caso específico de interacción de varias bombas; para otros fines un modelo simple de bomba es adecuada. Un modelo simple para una bomba se realiza usando una tabla de la curva característica de la bomba y una función de transferencia de primer orden que modela el retardo de la bomba.. Fig. 37 Modelo dinámico simple para una bomba. Para realizar la curva característica de la bomba de la PPA se realiza un experimento teniendo cerrada la válvula de salida del tanque cilíndrico (HA-106), luego se activa la bomba a un valor de frecuencia con el fin de poder medir el volumen en función del tiempo y calcular el volumen; se inicia encontrando con qué frecuencia se obtiene un caudal con el fin de encontrar el rango de frecuencia de trabajo y luego se realiza para diferentes valores de frecuencia obteniendo la siguiente tabla. Tabla 8 Datos Variador vs. Caudal. [Fuente el autor] % 0 25. frecuencia VARIADOR:O:FreqCom caudal [Hz] mand [cm^3/s] 27 270 0 35,25 352,5 82,6820903. 54.
(55) 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100. 36,9 38,55 40,2 41,85 43,5 45,15 46,8 48,45 50,1 51,75 53,4 55,05 56,7 58,35 60. 369 385,5 402 418,5 435 451,5 468 484,5 501 517,5 534 550,5 567 583,5 600. 129,45648 132,131715 146,105068 163,980844 169,067571 171,297617 190,221667 213,184312 215,066141 226,105537 234,389255 243,916717 248,108382 267,687869 280. De la tabla anterior se obtiene la respuesta de la bomba suministrando agua al tanque cilíndrico, se tiene rango de trabajo para la variable de control (VARIADOR:O:FreqCommand) de (270-600) y el caudal máximo es de 280[cm^3/s]. En simulink se agrega el bloque “1-D Lookup Table” el cual representará el comportamiento de la bomba.. Fig. 38 Bloque utilizado para el modelo de la bomba en simulink. [Fuente el autor] Este bloque es usado para encontrar un modelo no paramétrico del sistema por medio de la tabla de datos obtenida la cual es ingresada configurando vectores de entrada y salida. Como la respuesta de la bomba depende de la rampa de aceleración y desaceleración será modelado el sistema de primer orden teniendo en cuenta el tiempo de aceleración y desaceleración que se muestra en la Fig. 39.. 55.
Figure

![Fig. 6 Recipiente cilíndrico. [8]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/27.918.230.690.228.480/fig-recipiente-cilíndrico.webp)
![Fig. 21 Diagrama de bloques en simulink del modelo del sensor ultrasónico. [Fuente el autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/43.918.175.752.193.454/diagrama-bloques-simulink-modelo-sensor-ultrasónico-fuente-autor.webp)
+7
![Fig. 22 Dimensión del tanque cilíndrico, vista frontal y lateral respectivamente. [Fuente el autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/44.918.242.674.626.849/dimensión-tanque-cilíndrico-frontal-lateral-respectivamente-fuente-autor.webp)
![Fig. 23 Diagrama de bloques del modelo del tanque cilíndrico. [Fuente el autor] Con la variación del área se debe reemplazar en (51)](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/45.918.140.769.329.585/diagrama-bloques-modelo-tanque-cilíndrico-fuente-variación-reemplazar.webp)
![Fig. 26 Sistema hidráulico del tanque cilíndrico horizontal de la planta PPA. [Fuente el autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/47.918.139.790.503.812/sistema-hidráulico-tanque-cilíndrico-horizontal-planta-fuente-autor.webp)
![Fig. 34 Diagrama de bloques del modelo final del tanque cilíndrico. [Fuente el autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/53.918.195.724.127.436/diagrama-bloques-modelo-final-tanque-cilíndrico-fuente-autor.webp)
![Fig. 38 Bloque utilizado para el modelo de la bomba en simulink. [Fuente el autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7309587.352188/55.918.212.711.124.476/fig-bloque-utilizado-modelo-bomba-simulink-fuente-autor.webp)
Documento similar
Fuente: Albán, Eduardo y Paguay, Néstor Analizando dichos módulos existentes en el Laboratorio se determinó que el equipo que cumplía con las características especificadas constaba
