INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD ZACATENCO
”
Diseño e implementación de un
prototipo para monitoreo remoto con
un robot móvil, a través de una cámara
controlado vía Internet por WiFi
”
TESIS
Que para obtener el título de Ingeniero en
Comunicaciones y Electrónica
Presentan:
Alejandro Aranda Arzaluz
Juan Pablo Cruz Gutiérrez
Asesores Técnicos:
Ing. Armando Mancilla León
M. en C. Roberto Galicia Galicia
Asesor Metodológico:
M. en C. Genaro Zavala Mejia
Dedicatoria y Agradecimientos:
Esta Tesis se la dedico a mi madre Rosalba Arzaluz Nava, por ser el pilar más importante y por demostrarme siempre su cariño y apoyo incondicional sin importar nuestras diferencias de opiniones. A quien nunca podre pagar todos sus desvelos, ni aún con las riquezas más grandes del mundo. A quien han heredado el tesoro más valioso que puede dársele a un hijo.
A mi padre Gonzalo Arzaluz Gutiérrez, a pesar de nuestra distancia física, siento que está conmigo siempre y aunque nos faltaron muchas cosas por vivir juntos, sé que este momento hubiera sido tan especial para ti como lo es para mí.
A mi abuela María de la Luz Nava Martínez, por su apoyo, consejos, comprensión y ayuda en los momentos difíciles, y por ayudarme con los recursos necesarios para estudiar.
A mi familia, quienes sin escatimar esfuerzo alguno han sacrificado gran parte de su vida para formarme y educarme. A quienes la ilusión de su vida ha sido convertirme en persona de provecho.
A mis amigos Cesar Gutiérrez, Juan Carlos Castillo, Eduardo Huerta y a los Lobos (Yahveh Cureño Martínez, Gustavo Antonio Bautista, Juan Pablo Cruz Gutiérrez, Gerardo Nieves Díaz), por haber hecho tan ameno cada momento en esta etapa de mi vida, por ser tan chidos y prometieron que nunca cambiarían, a pesar del tiempo y la distancia, el momento o el lugar siempre serán mis amigos.
A mis hermanos Juan Gustavo Mendoza Arzaluz, Karina Mendoza Arzaluz, Mario Ortuño Mendoza, Monica Martínez Mendoza, Álvaro Martínez Mendoza, Marilyn Martínez Mendoza, Ricardo Iturbide García, Alejandra Iturbide García, Jessica Ángeles Arzaluz, Vanessa Ángeles Arzaluz, Jesús Muciño Arzaluz, Arely Ángeles Arzaluz por el simple hecho de tenerlos a mi lado, conocerlos y vivir día a día momentos de felicidad, tristezas y alegrías sin condición alguna.
A mis asesores Roberto Galicia Galicia, Armando Mancilla León, agradezco infinitamente toda su confianza y apoyo, por compartir desinteresadamente sus conocimientos, experiencias, consejos para realizar con éxito este proyecto.
Po esto ás….G a ias.
Alejandro Aranda Arzaluz
Mis padres Julio Cruz Cruz y María Elena Gutiérrez Jiménez así como mis hermanos Julio Cruz Gutiérrez y Marlene Cruz Gutiérrez, gracias a su apoyo comprensión y enseñanzas a lo largo de mi vida, que fueron parte indispensable para esta etapa de mi vida, así como un ejemplo a seguir de superación y perseverancia constante, para lograr mis metas en la vida.
A mis asesores
Ya que gracias a sus enseñanzas, ayuda y paciencia, fue posible aprender a manejar, los dispositivos utilizados para desarrollar el prototipo, pues sin estos valiosos conocimientos nada de esto habría sido posible, y en especial quiero agradecer a nuestro asesor Roberto Galicia Galicia por su disposición y paciencia para resolver dudas o darnos explicaciones.
A mis amigos
Los lobos (Alejandro Aranda, Gerardo Nieves, Gustavo Antonio, Yahveh Cureño), porque fueron parte importante para mi desarrollo como persona y como estudiante y por el apoyo, los consejos y la confianza que me brindaron.
A todos los aquí mencionados gracias por ser parte de este logro.
Índice de contenido
Dedicatoria y Agradecimientos: ... ii
Índice de contenido ... iv
Tabla de Figuras ... viii
Índice de Tablas ... x
Objetivos ... xi
Objetivo General ... xi
Objetivos Particulares ... xi
Descripción Breve ... xii
Antecedentes ... xiii
Justificación ... xv
Estado del Arte ... xvi
Sistemas de Telepresencia ... xvi
Videovigilancia IP ... xvii
Cámara de Vigilancia GSM ... xviii
WiMAX ... xviii
LTE ... xx
Capítulo I Marco Teórico y de Referencia ... 2
1.1 Introducción ... 2
1.2 Imagen y su formación... 3
i Resolución y tamaño de una Imagen en una cámara digital ... 4
1.3 Comunicaciones Periféricas ... 4
i Comunicación UART ... 4
ii Comunicación SPI ... 5
1.4 Redes ... 6
i Modelo OSI ... 6
ii Modelo TCP/IP ... 8
iii Protocolo TCP ... 10
iv Establecimiento de una conexión TCP ... 11
v Cierre de la conexión TCP ... 12
vii Protocolo IP ... 14
viii Puertos y Zócalos (Sockets) ... 16
ix Clases de direcciones IP ... 18
x Dirección IP Privadas ... 19
xi Dirección IP Pública ... 19
xii Dirección IP Estática ... 20
xiii Dirección IP Dinámica ... 20
xiv DHCP ... 21
1.5 HTTP ... 21
1.6 NAT ... 23
i Funcionamiento de NAT ... 23
ii Internet y su funcionamiento básico ... 24
iii Clientes y Servidores ... 25
iv WiFi ... 26
v 802.11 ... 27
vi Capa Física y Enlace de Datos ... 27
a) Subcapa Física PHY (Physical) ... 28
b) Subcapa MAC ... 28
c) Subcapa LLC ... 29
vii Antena ... 29
viii Topologías ... 30
a) Punto a punto ... 30
b) Punto de Acceso ... 30
ix Interferencia y Atenuación ... 32
x Ancho de Banda ... 32
xi Protocolos de Seguridad y Encriptación de datos en WiFi ... 33
xii Proceso de Asociación entre Dispositivos WiFi ... 33
1.7 Plataformas ... 34
1.8 Tarjetas de Desarrollo ... 34
1.9 Microcontroladores ... 35
1.10 Lenguajes de Programación ... 37
2.1 Introducción ... 39
2.2 Cámara IP Inalámbrica ... 40
2.3 Tarjeta de Desarrollo TWR-K60D100M Kit ... 41
i TWR-WIFI-G1011MI ... 43
2.4 Motorreductores y Móvil ... 44
2.5 Puente H ... 45
2.6 Control del sistema ... 46
2.7 WiFi ... 49
2.8 Programación del Sistema Operativo de Tiempo Real MQX ... 53
2.9 Diseño esencial del sistema operativo MQX ... 53
2.10 Módulos en el sistema operativo MQX ... 54
2.11 Tareas en MQX ... 54
2.12 Tipo de Programación en MQX ... 55
i FIFO (First In, First Out) ... 55
ii Round-Robin ... 56
iii Programación Explicita ... 57
2.13 Controlador ... 57
2.14 Controlador GPIO ... 58
2.15 Sistema de Archivos USB ... 58
2.16 Pila RTCS en MQX ... 60
2.17 Servidor WEB ... 63
2.18 Diagramas Generales del sistema ... 64
2.19 Ambiente de desarrollo ... 65
2.20 Lenguajes de Programación (C, HTML) ... 65
i Lenguaje HTML ... 65
2.21 Estructura de una página Web ... 66
2.22 Lenguaje C ... 67
i Características ... 67
ii Uso de las funciones ... 67
Capítulo III Resultados ... 69
3.1 Introducción ... 69
i Programación en Flash ... 70
ii Programación en Tiempo Real ... 70
3.3 Página Web en el Servidor HTTP ... 73
3.4 Implementación a Internet ... 73
3.5 Conclusiones ... 75
Glosario ... 76
Anexos ... 79
3.6 Programas MQX ... 79
3.7 Paginas HTML ... 88
3.8 Análisis Económico ... 91
Tabla de Figuras
Figura 1.- Diagrama General del Proyecto ... xii
Figura 2.- Diagrama de un Sistema CCTV Analógico ... xiii
Figura 3.- Diagrama de un Sistema CCTV Digital ... xiv
Figura 4.- Diagrama de un Sistema CCTV extendido a Internet ... xiv
Figura 5.- Control de un Explorador Acuático a través del sistema de Telepresencia (Tomada de la NASA) ... xvi
Figura 6.- Diagrama de un sistema de Videovigilancia IP ... xvii
Figura 7.- Sistema de Videovigilancia a través de la tecnología GSM ... xviii
Figura 8.- Infraestructura y alcances de WiMAX ... xx
Figura 9.-Convivencia entre redes LTE, 4G y WiMax ... xxi
Figura 10.- Proceso de Formación de una Imagen Digital ... 3
Figura 11.- Representación de la Resolución de una Imagen ... 4
Figura 12.- Diagrama a Bloques de una Comunicación UART ... 5
Figura 13.- Diagrama de comunicación del protocolo SPI ... 6
Figura 14.- Estructura del Modelo de Comunicación OSI ... 7
Figura 15.- Procesos del Modelo OSI ... 8
Figura 16.- PDU de las capas del Modelo OSI ... 8
Figura 17.- Estructura de los principales Protocolos TCP/IP ... 9
Figura 18.- Proceso de Apertura de una Conexión TCP ... 12
Figura 19 .-Cierre de Conexión TCP ... 13
Figura 20.- Comparación entre TCP/IP y OSI ... 14
Figura 21.- Relación de IP con otros Protocolos de Red ... 16
Figura 22.- Red Privada y Proxy para Internet ... 19
Figura 23.- Topología de una IP Pública ... 20
Figura 24.- Paquetes de Conexión DCHP ... 21
Figura 25.- Funcionamiento del Protocolo NAT ... 24
Figura 26.- Arquitectura 802.11 con respecto al Modelo OSI ... 29
Figura 27.- Representación de una Topología Ad-hoc ... 30
Figura 28.- Infraestructura de Red Inalámbrica con Access Point ... 31
Figura 29.- Roaming en una Red Inalámbrica ... 31
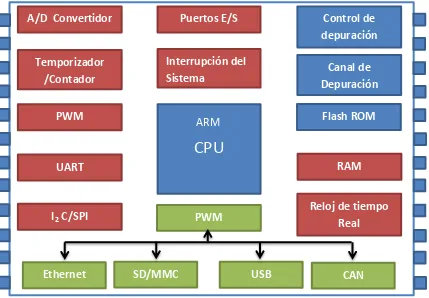
Figura 30 .-Arquitectura de un Microcontrolador ... 35
Figura 31 .- Arquitectura Harvard ... 36
Figura 32.- Arquitectura ARM ... 36
Figura 33.- Diagrama a Bloques del Sistema ... 39
Figura 34.- Cámara IP Inalámbrica ... 40
Figura 35.- Diagrama de Conexión Cámara IP Inalámbrica ... 40
Figura 36.- Sistema de la Torre de Freescale TWRK60D100M ... 42
Figura 38.- Servidor Web HTTP en microcontrolador KD100M ... 43
Figura 39.- Tarjeta Inalámbrica WiFi TWR-K60D100M... 44
Figura 40.- Conexión del Módulo WiFi con el Microcontrolador ... 44
Figura 41.- Motorreductor ... 45
Figura 42.- Arreglo de un puente H ... 46
Figura 43.- L293D Configurado como puente H ... 46
Figura 44.- Diagrama Eléctrico para el Control de los Motores ... 48
Figura 45.- Diagrama de Control para el desplazamiento del Móvil ... 49
Figura 46.- Arquitectura del Módulo GS1011MI con un Microcontrolador Freescale (Tomada de la guía de referencia del módulo GS1011MI) ... 50
Figura 47.- Diagrama de la Interfaz Inalámbrica y el Microcontrolador por SPI ... 51
Figura 48.- Manejo del Control de Flujo de Datos en SPI ... 52
Figura 49.- Composición del kernel del MQX ... 53
Figura 50.- Operación de Tareas en MQX ... 54
Figura 51.- Código básico para definir y usar una tarea en MQX ... 55
Figura 52.- Estructura de operación FIFO ... 56
Figura 53.- Estructura de Operación Round Robin ... 56
Figura 54.- Estructura de un Dispositivo y Driver, de Entrada y Salida ... 57
Figura 55.- Proceso de Comunicación de USB con el Microcontrolador ... 59
Figura 56.- Diagrama de Integración de los Componentes del Sistema ... 60
Figura 57.- Estructura del RTCS incluido en la distribución de MQX (Tomada de la Guía de Usuario RTCS, Freescale Semiconductor 2008) ... 61
Figura 58.- Proceso para crear y establecer un socket... 61
Figura 59.- Diagrama de inicialización de comunicaciones (RTCS). ... 62
Figura 60.- Proceso de inicialización del servidor WEB ... 63
Figura 61.- Tareas Generales del Sistema Operativo MQX ... 64
Figura 62.- Diagrama de Flujo General del Sistema MQX ... 64
Figura 63.- Ambiente de Desarrollo Code Warrior 10.1 y MQX 3.7 ... 65
Figura 64.- Estructura Básica de una Pagina Web HTML ... 66
Figura 65.- Pagina Básica en HTML ... 66
Figura 66.- Robot Móvil montado con el Servidor HTTP ... 69
Figura 67.- Servidor HTTP y Sistema de Comunicación WiFi ... 69
Figura 68.- Configuración de los Parámetros de Red en MQX para el Servidor ... 70
Figura 69.- Parámetros de Configuración en la Web Provisional para el Servidor en MQX ... 71
Figura 70.- Botones para la Configuración y Arranque del Servidor ... 71
Figura 71.- Pagina Web Provisional para Configuración del Servidor ... 72
Figura 72.- Parámetros de Configuración de Red en el Servidor en Tiempo Real ... 72
Figura 73.- Configuración del Protocolo NAT en el dispositivo Proveedor de Red ... 73
Índice de Tablas
Tabla 1.- Evolución de WiMAX ... xix
Tabla 2.- Modelo de Capas de TCP/IP ... 10
Tabla 3.- Paquete TPC ... 11
Tabla 4.- Paquete UDP ... 14
Tabla 5.- Datagrama IP ... 16
Tabla 6.- Puertos TCP más usados ... 18
Tabla 7.- Clases de Direcciones IP ... 18
Tabla 8.- Rangos de direcciones IP Privadas ... 19
Tabla 9.- Generaciones WiFi ... 27
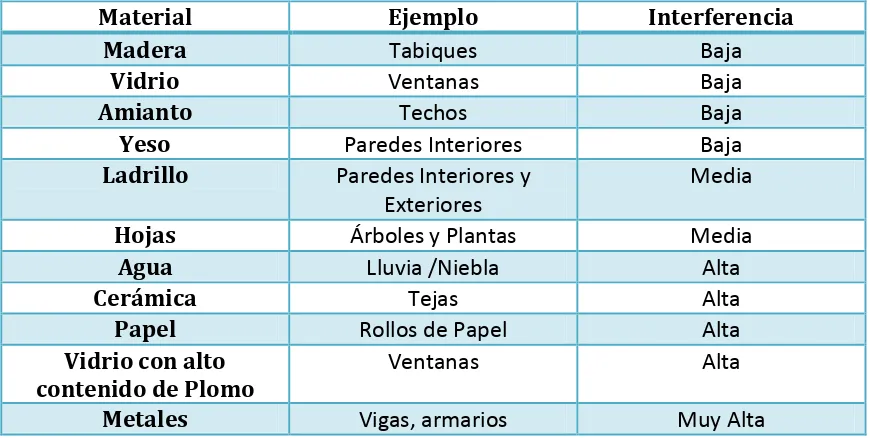
Tabla 10 .- Materiales que provocan interferencia en las señales inalámbricas ... 32
Tabla 11.- Tabla Lógica para el Control de los Motores ... 47
Tabla 12.- Caracteres de Datos para el Control del Módulo WiFi ... 51
Objetivos
Objetivo General
Diseñar e implementar un sistema de monitoreo móvil, controlado vía Internet por medio de una página Web interactiva, que muestre al usuario lo que capta la cámara de vídeo, en tiempo real.
Objetivos Particulares
Mostrar en tiempo real la ubicación del móvil, mediante vídeo.
Implementar una capa de servicio para controlar el móvil desde la página Web.
Diseñar una página Web que permita visualizar el entorno móvil.
Realizar conexión inalámbrica al móvil y al servidor mediante el uso de la tecnología Wi-Fi.
Agregar sobre la comunicación Wi-Fi los bits de control del móvil.
Descripción Breve
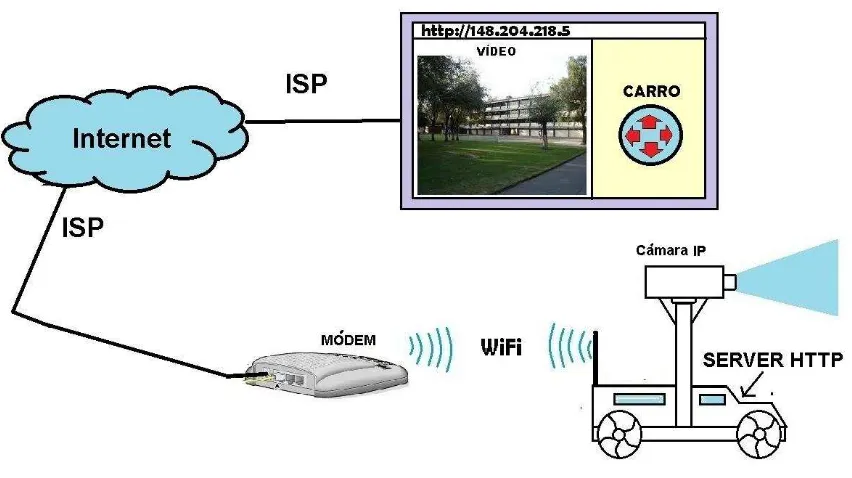
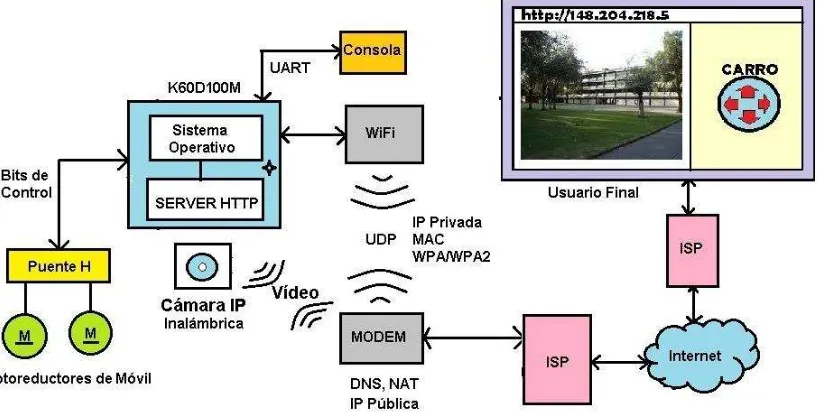
Este proyecto consiste en implementar un servicio de monitoreo. El cual proporciona la facultad de desplazar un robot móvil a través del ambiente o evento que se esté monitoreando. En este caso, con el término monitoreo, implica grabar o tomar vídeo y cuando se menciona Internet, quiere decir que este vídeo tomado, será enviado o transmitido por este medio de comunicación: ya sea a uno o varios usuarios. Por otra parte se transmitirá vídeo por Internet a un usuario determinado, y también este usuario será capaz de controlar la posición del carro quien es el portador de la cámara. Todo esto mediante una página Web.
[image:13.595.86.512.290.529.2]Lo anterior se muestra en la figura 1 que es el diagrama general.
Antecedentes
La visión es el sentido que mayor información aporta al ser humano. Por este motivo la forma más natural de presentar la información por parte de cualquier sistema es mediante imágenes, que a su vez mostradas a una velocidad mayor a la que el ojo humano puede percibir los cambios, dan vida al video, para ello se usa una cámara que es la encargada de captar lo que su lente observa. En analogía esto logra el sistema visual humano siendo la cámara sus ojos y el cerebro el que procesa las imágenes para que sean continuas.1
El video ha venido jugando diversos papeles en la historia, uno de ellos dio cabida a la vigilancia por video y al monitoreo que juntos conforman la videovigilancia. Desde hace más de 50 años se han desarrollado sistemas de videovigilancia, y comenzaron siendo 100% analógicos. Uno de los sistemas pioneros, es el CCTV, formado por cámaras analógicas con salida coaxial, conectadas al VCR o Centro Receptor de Video por sus siglas en inglés. El VCR utiliza cintas de video magnéticas y sirve como medio de almacenamiento. El vídeo no se comprime y, si se graba a una velocidad de imagen completa, una cinta durará como máximo 8 horas. En sistemas mayores, se puede conectar un multiplexor entre la cámara y el VCR. El multiplexor permite grabar el vídeo procedente de varias cámaras en un solo grabador, pero con el inconveniente que tiene una menor velocidad de imagen. Para visualizar el vídeo, es necesario un monitor analógico que lo despliegue. Dicho sistema se resume en la figura 2.
Figura 2.- Diagrama de un Sistema CCTV Analógico
Conforme la tecnología avanzo se sustituyó el VRC por un DVR pasando de un Video Analógico a un formato Digital, donde la cinta de vídeo se sustituye por discos duros como medios de almacenamiento, y es necesario que el vídeo se digitalice y comprima para almacenar la máxima cantidad de imágenes posible (aproximadamente un día). Este sistema integra el multiplexor en una sola caja a comparación del primer CCTV, tal como se muestra en la figura 3.
Figura 3.- Diagrama de un Sistema CCTV Digital
El gran auge que fue desarrollando Internet obligo al CCTV a que se conectara a esta red de redes ya que no solo requería que se grabara localmente el video, sino que este estuviera disponible en todo momento, provocando la modificación del DVR y llevándolo a un DVR-Ethernet, medio por el cual se comunicaría con un Switch y Router de Red y este a su vez a una LAN hasta llegar a Internet. Además provocando que el video se muestre en varios monitores y a su vez a las cámaras se les agrego la capacidad de movimiento que permite ampliar el rango focal de visión, logrando cubrir mayores áreas, el sistema completo se aprecia en la figura 4.
Figura 4.- Diagrama de un Sistema CCTV extendido a Internet
Con el paso de los años el DVR-IP se convirtió en un Servidor de Video, el cual cuenta con capacidad de procesar el video a formatos digitales diferentes, aumento la capacidad de almacenamiento y su robustez física se hizo pequeña.2
Justificación
En el mundo existe la necesidad de administrar, controlar y monitorear sitios de manera remota y a distancia. Debido al rápido desarrollo de la tecnología de internet, da pie a que cualquier dispositivo (computadora, PDA, Smart Phone, entre otros) puedan conectarse a la red de redes. Esta situación propicia a que surjan un sin número de aplicaciones, por ejemplo videoconferencia, sistemas de seguridad a distancia, enlaces telefónicos de VoIP, control y monitoreo a distancia.
Este proyecto se enfoca en desarrollar un sistema de monitoreo a distancia, por la creciente necesidad de vigilar, una empresa, una escuela o algún otro lugar, a pesar de encontrarse fuera de estos sitios. En la actualidad existen diferentes soluciones para cubrir las necesidades antes mencionadas, por ejemplo:
• “iste as de o ito eo de t áfi o.
• “iste as de á a as fijas de segu idad au ue este solo u e la pa te de vigilar porque la mayoría no tiene acceso remoto).
• “iste as de vigilancia con cámaras IP.
Los dos primeros son muy costosos, siendo los propietarios los gobiernos, centros comerciales, empresas privadas y de gran capital, estando fuera del alcance de la mayoría de la gente para adquirir estos sistemas. Las cámaras IP, por lo regular no necesitan una instalación robusta, basta con conectarlas a una red, para tener acceso desde cualquier lugar con conexión a internet. Estas cámaras son prácticas cuando se quiere monitorear un solo sitio, pero al monitorear más de tres lugares, se multiplica el costo de los sistemas. Se piensa que en la actualidad adquirir tres, cuatro o más cámaras IP, para muchas familias es un lujo que no se pueden dar. En el caso que se adquiriera una cámara IP con movimiento, esta no tiene gran cobertura por las limitaciones del ángulo visual y los movimientos de la misma, resultando insuficiente para cubrir espacios más amplios.
Estado del Arte
El mando a distancia se ha ido desarrollando y demandando muy rápido, permitiendo que el control y monitoreo sea de una manera no presencial y esto gracias al crecimiento del Internet. En la actualidad existen grandes aplicaciones que se vienen desarrollando y aplicando a pasos agigantados, gracias a la electrónica y la informática para el control y monitoreo. A continuación se muestran algunos ejemplos, en el cual se ven reflejados los resultados de la unión de estas dos grandes áreas.
Sistemas de Telepresencia
La Telepresencia, término creado por Marvin Minsky, significa presencia remota y proporciona a la persona una sensación de estar físicamente en otro lugar por medio de una escena creada por ordenador. Esta tecnología vincula sensores remotos en el mundo real con los sentidos de un operador humano. Los sensores utilizados pueden hallarse instalados en un robot o en los extremos de algunas herramientas. De esta forma el usuario puede operar el equipo como si fuera parte de él. Los sistemas de telepresencia sitúan al observador en un mundo real que es capturado por videocámaras ubicadas en lugares distantes y le permiten la manipulación remota de objetos reales mediante brazos robotizados. Es decir que el usuario interactúa en un mundo real pero que está ubicado en un sitio distinto a donde él se encuentra en ese momento. También se está empezando a utilizar para celebrar reuniones virtuales. Diferentes contertulios equipados con sistemas de video y audio y conectados a un servidor pueden dar lugar a un escenario común interactuando con los demás como si se encontraran en el mismo espacio físico.
Dicha tecnología posee un futuro extremadamente prometedor hasta el punto de que la propia NASA se propone utilizarla como recurso para la exploración planetaria a distancia. La figura 5 muestra un ejemplo de este sistema. 3
Figura 5.- Control de un Explorador Acuático a través del sistema de Telepresencia (Tomada de la NASA)
Videovigilancia IP
La videovigilancia avanza hacia entornos IP creando en el camino escenarios híbridos capaces de aprovechar las nuevas propuestas de análisis de vídeo que optimizan los procesos de seguridad e incrementan la inteligencia de negocio.
Durante los últimos 10 años la videovigilancia ha seguido un camino de evolución que está dejando atrás las soluciones convencionales basadas en sistemas de televisión en circuito cerrado (CCTV) con conexiones punto a punto para adoptar modernos sistemas digitales basados en redes IP. Gracias a las últimas tecnologías de compresión H.264 (norma que define un códec de vídeo de alta compresión) y a la constante caída de los precios de las cámaras IP, la videovigilancia IP se está convirtiendo en el enfoque mayoritariamente seguido por las instalaciones de seguridad de vídeo. Y aún más. La convergencia de voz, vídeo y datos sobre la que se asienta esta nueva tecnología está abriendo la videovigilancia a nuevos campos de exploración y producción integrados con la inteligencia de negocio en áreas como ventas y marketing. La videovigilancia IP optimiza las inversiones en infraestructuras de red y aporta un modelo de seguridad más simple, refinado y accesible a los usuarios. En muchos casos resulta además económicamente más rentable en términos de costes que un sistema de videovigilancia convencional con cámaras analógicas y grabadoras de vídeo digitales. Otro beneficio del vídeo IP es la capacidad de acceder remotamente a las instalaciones por medio de la LAN o la WAN y centralizar la monitorización de la seguridad, en vez de dedicar vigilantes en cada sitio.
Las características inteligentes hoy disponibles en la mayoría de los sistemas permiten transmitir vídeo solo ante eventos específicos, como la detección de movimientos en un edificio de oficinas después de las horas laborales habituales. Además, algunos sistemas permiten fijar el uso del ancho de banda, limitando la transmisión de vídeo a una tasa de bits determinada para garantizar que los datos no se vean nunca comprometidos. Finalmente, el uso del ancho de banda puede asimismo ser gestionado a través de la selección de cámaras IP y codificadores con tarjetas de memoria flash interna SDHC que permite capturar vídeo en los puntos extremos. La figura 6 muestra un sistema con las características mencionadas.4
Figura 6.- Diagrama de un sistema de Videovigilancia IP
Cámara de Vigilancia GSM
Posee tecnología GSM de control remoto vía SMS, apta para utilizar en interiores. A través de este dispositivo se permite recibir y transmitir datos mediante mensaje y también transmitir datos por la red GPRS, de modo que el usuario podrá supervisar en todo momento su negocio, hogar o segunda residencia. Pero lo que es realmente novedoso en este modelo es que tiene la función de detección de movimiento y mediante el envío de un MMS al número de teléfono móvil o a la dirección de email establecidos, su dueño estará al tanto siempre de quién ronda sus propiedades.
La Cámara Vigilancia GSM compacta funciona como un móvil y necesita una tarjeta USIM que permita hacer videollamadas para establecer la comunicación. Al ser una cámara diseñada para la vigilancia y el control a distancia, ofrece una enorme calidad de imagen y sonido, por lo que es posible ver incluso en la oscuridad. Entre sus características, también habría que destacar que no utiliza cables y es muy fácil de instalar. El sistema de videovigilancia GSM se muestra en la figura 7.5
Figura 7.- Sistema de Videovigilancia a través de la tecnología GSM
WiMAX
Siglas de Worldwide Interoperability for Microwave Access (Interoperabilidad mundial para acceso por microondas), es una norma de transmisión de datos que utiliza las ondas de radio en las frecuencias de 2,3 a 3,5 Ghz.
Es una tecnología dentro de las conocidas como tecnologías de última milla, y permite la recepción de datos por microondas y retransmisión por ondas de radio. El estándar que define esta tecnología es el IEEE 802.16. Una de sus ventajas es dar servicios de banda ancha en zonas donde el despliegue de cable o fibra por la baja densidad de población presenta unos costos por usuario muy elevados.
El único organismo habilitado para certificar el cumplimiento del estándar y la interoperabilidad entre equipamiento de distintos fabricantes es el Wimax Forum: todo equipamiento que no cuente con esta certificación, no puede garantizar su interoperabilidad con otros productos.6
Existen dos variantes en el estándar y son:
De acceso fijo, (802.16d), en el que se establece un enlace radio entre la estación base y un equipo de usuario situado en el domicilio del usuario. Para el entorno fijo, las velocidades teóricas máximas que se pueden obtener son de 70 Mbps con un ancho de banda de 20 MHz. Sin embargo, en entornos reales se han conseguido velocidades de 20 Mbps con radios de célula de hasta 6 Km, ancho de banda que es compartido por todos los usuarios de la célula.
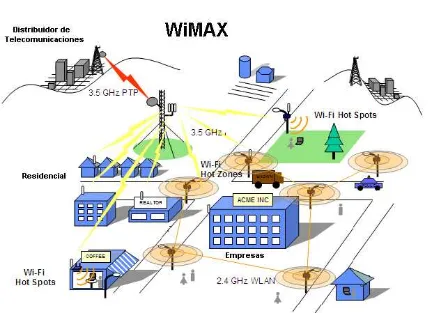
Movilidad completa (802.16e), permite el desplazamiento del usuario de un modo similar al que se puede dar en GSM/UMTS, el móvil, aun no se encuentra desarrollado y actualmente compite con las tecnologías LTE, (basadas en femtocélulas, conectadas mediante cable), por ser la alternativa para las operadoras de telecomunicaciones que apuestan por los servicios en movilidad, este estándar, en su variante "no licenciado", compite con el WiFi IEEE 802.11n, ya que la mayoría de los portátiles y dispositivos móviles, empiezan a estar dotados de este tipo de conectividad (principalmente de la firma Intel). En la tabla 1 se representan los principales protocolos unidos a WiMAX. En la figura 8 se muestra la implantación e infraestructura de ésta Tecnología.
Características de WiMAX
Distancias de hasta 80 kilómetros, con antenas muy direccionales y de alta ganancia.
Velocidades de hasta 75 Mbps, siempre que el espectro esté completamente limpio.
Facilidades para añadir más canales, dependiendo de la regulación de cada país.
Anchos de banda configurables y no cerrados, sujetos a la relación de espectro.
Permite dividir el canal de comunicación en pequeñas subportadoras (dos tipos: guardias y datos).
Tabla 1.- Evolución de WiMAX
Estándar Descripción
802.16 Utiliza espectro licenciado en el rango de 10 a 66 GHz, necesita línea de visión directa, con una capacidad de hasta 134 Mbps en celdas de 2 a 5 millas (3 a 7,5 km). Soporta calidad de servicio. Publicado en 2002
802.16a Ampliación del estándar 802.16 hacia bandas de 2 a 11 GHz, con sistemas NLOS y LOS, y protocolo PTP y PTMP. Publicado en abril de2003
802.16c Ampliación del estándar 802.16 para definir las características y especificaciones en la banda de 10-66 GHz. Publicado en enero de 2003
802.16d Revisión del 802.16 y 802.16a para añadir los perfiles aprobados por el WiMAX Forum. Aprobado como 802.16-2004 en junio de 2004 (La última versión del estándar)
802.16e Extensión del 802.16 que incluye la conexión de banda ancha nómada para elementos portátiles del estilo de los notebooks. Publicado en diciembre de 2005
[image:21.595.85.514.261.574.2]802.16m Extensión del 802.16 que entrega datos a velocidad de 1 Gbit/s en reposo y 100 Mbit/s en movimiento.
Figura 8.- Infraestructura y alcances de WiMAX
LTE
mayor facilidad de implementación. Una infraestructura entre redes LTE, 3G y WiMAX es mostrada en la figura 9.7
Características
Alta eficiencia espectral
OFDM de enlace descendente robusto frente a las múltiples interferencias y de alta afinidad a las técnicas avanzadas como la programación de dominio frecuencial del canal dependiente y MIMO.
Muy baja latencia con valores de 100 ms para el plano de control y 10 ms para el plano de usuario.
Separación del plano de usuario y el plano de control mediante interfaces abiertas.
Ancho de banda adaptativo: 1.4, 3, 5, 10, 15 y 20 MHz
Puede trabajar en muchas bandas frecuenciales diferentes.
Red de frecuencia única OFDM.
Velocidades de pico:
Bajada: 326,5 Mbps para 4x4 antenas, 172,8 Mbps para 2x2 antenas.
“u ida: 8 ps.
Óptimo para desplazamientos hasta 15 km/h. Compatible hasta 500 km/h
Más de 200 usuarios por celda. Celda de 5 MHz.
Celdas de 100 a 500 km con pequeñas degradaciones cada 30 km. Tamaño óptimo de las celdas 5 km.
La 2G y 3G están basadas en técnicas de Conmutación de Circuito (CS) para la voz mientras que LTE propone la técnica de Conmutación por paquetes IP (PS) al igual que 3G (incluyendo las comunicaciones de voz).
Las operadoras UMTS pueden usar más espectro, hasta 20 MHz
Figura 9.-Convivencia entre redes LTE, 4G y WiMax
CAPÍTULO I. Marco Teórico y de Referencia
Capítulo I
CAPÍTULO I. Marco Teórico y de Referencia
Capítulo I Marco Teórico y de Referencia
1.1
Introducción
Existen circunstancias en las cuales no es conveniente emplear personas para la realización de algunas labores debido al alto riesgo a que ellos se exponen; por esta razón se han desarrollado herramientas o equipos que permiten reemplazar al hombre al realizar estas operaciones a distancia, o simplemente el ser humano tiene el deseo de estar informado de lo que acontece en tiempo real de algún sitio de su interés como lo son su hogar, su oficina, su lugar de trabajo o alguna área en la cual no puede estar presente físicamente en esos momentos. Dentro de estos equipos se encuentran los robots móviles operados remotamente o denominados teleoperados. Los robots teleoperados son aquellos controlados por un usuario a distancia desde una estación remota. Dada su gran utilidad, se han empleado en diversos campos. Este tipo de manejo supone una ventaja desde el punto de vista de la protección, seguridad, confort y disponibilidad a la distancia para un usuario ya que en caso de realizar trabajos en ambientes inseguros o inestables o con sustancias potencialmente peligrosas, como químicos o explosivos, no se arriesga su integridad física. En el desarrollo de robots teleoperados se involucra la electrónica, las comunicaciones, el control, y la visión por computadora.
La robótica es una ciencia o rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas realizadas por el ser humano o que requieren del uso de inteligencia, además es un área interdisciplinaria formada por la ingeniería mecánica, electrónica e informática.
La mecánica comprende tres aspectos: diseño mecánico de la máquina, análisis estático y análisis dinámico. La electrónica le permite al robot trasmitir la información que se le entrega, coordinando impulsos eléctricos que hacen que el robot realice los movimientos requeridos por la tarea. La informática provee de los programas necesarios para lograr la coordinación mecánica requerida en los movimientos del robot, dar un cierto grado de inteligencia a la máquina, es decir adaptabilidad, autonomía y capacidad interpretativa y correctiva.
CAPÍTULO I. Marco Teórico y de Referencia
Utilizando estos conceptos se pretende resolver el problema de inaccesibilidad del hombre en ciertos lugares, la no disponibilidad física en el sitio deseado y la transmisión de información obtenida del medio, como el video, para proporcionar este tipo de información con una amplia disponibilidad al usuario final, usando Internet y las comunicaciones inalámbricas en este caso WiFi para la transmisión del video.
1.2
Imagen y su formación
Una imagen es una representación bidimensional a partir de una matriz numérica binaria. Dependiendo de la resolución, puede tratarse de una imagen matricial (o mapa de bits) o de un gráfico vectorial. El mapa de bits es el formato más utilizado, aunque los gráficos vectoriales tienen uso amplio en la autoedición y en las artes gráficas.
El proceso de formación de una imagen obtenida de una cámara se da cuando la luz detectada por la cámara pasa por el objetivo, atraviesa filtros (depende del modelo de cámara) y llega hasta el sensor de imagen, denominado CCD, que está formado por multitud de receptores fotosensibles, llamados "fotodiodos". El proceso de formación de una imagen es mostrado en la figura 10.
Figura 10.- Proceso de Formación de una Imagen Digital
La luz incidente genera una pequeña señal eléctrica en cada receptor. A continuación, esta señal es transformada en datos digitales por el conversor ADC, este último representa los datos como una serie de cadenas de ceros y unos, denominados dígitos binarios. Estos números binarios, se representan como pequeños cuadros, llamados píxeles, que forman un mosaico. Como los píxeles suelen ser muy pequeños, el ojo y el cerebro del observador se encargan de formar una imagen continua, ignorando las diminutas piezas que la forman.8
CAPÍTULO I. Marco Teórico y de Referencia
i
Resolución y tamaño de una Imagen en una cámara digital
La resolución de una imagen es la cantidad de pixeles que la componen. Suele medirse en pixeles por pulgada (ppi) o pixeles por centímetro (pcm). Como la resolución mide el número de píxeles por longitud, se deduce que a mayor resolución, mayor número de puntos de imagen en el mismo espacio y, por tanto, mayor definición. La resolución está limitada por el sensor de la cámara (CCD o un Sensor CMOS). El sensor se o po e de illo es de u os ue se a ga e espuesta a la luz, éstos responden solamente a una gama limitada de longitudes de onda, debido a un filtro de frecuencias. Cada uno de estos cubos se llama píxel, y se utiliza un algoritmo de mosaicismo e interpolación, para unir la imagen de cada gama de longitud de onda por píxel en una imagen RGB. La cantidad de píxeles resultante en la imagen determina su tamaño. Por ejemplo, una imagen de 640 píxeles de ancho, por 480 pixeles de alto, tendrá 307,200 píxeles, o aproximadamente 307 kilo píxeles como se muestra en la figura 11.9
Figura 11.- Representación de la Resolución de una Imagen
1.3
Comunicaciones Periféricas
i
Comunicación UART
UART, son las siglas de "Universal Asynchronous Receiver-Transmitter" (Transmisor-Receptor Asíncrono Universal). Es el dispositivo clave de un sistema de comunicaciones serie. Su función principal, es convertir los datos serie a paralelo cuando se trata de datos recibidos (de entrada), y de convertir datos paralelo a serie para la transmisión (de salida). También suministra funciones de comprobación necesarias para interfaces RS232. De manera general, en la figura 12 se muestra el diagrama a bloques del
CAPÍTULO I. Marco Teórico y de Referencia
contenido básico en una comunicación UART, los registros y puertos de habilitación dependerán de cada sistema.10
Figura 12.- Diagrama a Bloques de una Comunicación UART
ii
Comunicación SPI
“PI o “e ial Pe iphe allI te fa e I te faz Pe ifé i a “e ial , es u us de t es lí eas, sobre el cual se transmiten paquetes de información de 8 bits. Cada una de estas tres líneas transporta la información entre los diferentes dispositivos conectados al bus. Cada dispositivo conectado al bus, puede actuar como transmisor y receptor al mismo tiempo, por lo que este tipo de comunicación serial es de ida y vuelta. Dos de estas líneas trasfieren los datos (una en cada dirección), y la tercer línea es la del reloj.
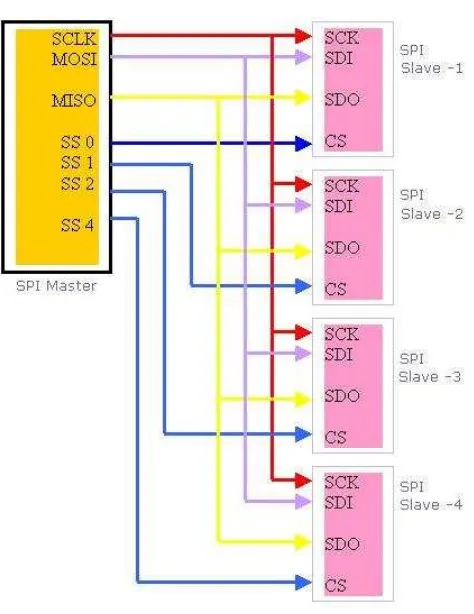
Los dispositivos conectados al bus son definidos como maestros o esclavos. Un maestro es aquel que inicia la transferencia de información sobre el bus, y genera las señales de reloj y control. En un tiempo determinado T1, sólo podrá existir un maestro sobre el bus. Cualquier dispositivo esclavo que no esté seleccionado, debe deshabilitarse (ponerlo en alta impedancia). SPI es un protocolo síncrono, el diagrama que básico de una comunicación con este protocolo se muestra en la figura 13. La sincronización y la transmisión de datos se realiza por medio de 4 señales:
SLCK- Es el pulso que marca la sincronización. Con cada pulso de este reloj, se lee un bit o se envía un Bit.
MOSI- Salida de datos del Maestro y entrada de datos al Esclavo.
CAPÍTULO I. Marco Teórico y de Referencia
MISO- Salida de datos del Esclavo y entrada al Maestro. También conocido por SOMI.
Selector (SS)- Para seleccionar un Esclavo, o para que el Maestro le diga al Esclavo que se active.
La cadena de bits es enviada de manera síncrona con los pulsos del Reloj, es decir con cada pulso, el Maestro envía un Bit. Para que empiece la transmisión, el Maestro baja la señal del Selector a cero, con esto el Esclavo se activa y empieza la transmisión, con un pulso de reloj al mismo tiempo que el primer bit es leído. Los pulsos de reloj pueden estar programados, de manera que la transmisión del bit se realice en 4 modos diferentes, a esto se llama polaridad y fase de la transmisión:
1. Con el flanco de subida sin retraso.
2. Con el flanco de subida con retraso.
3. Con el flanco de bajada sin retraso.
[image:28.595.192.429.305.612.2] 4. Con el flanco de bajada con retraso.
Figura 13.- Diagrama de comunicación del protocolo SPI
1.4
Redes
i
Modelo OSI
CAPÍTULO I. Marco Teórico y de Referencia
TC97-SC16. La norma final (ISO 7498) se publica en 1984. Este modelo define las bases, para el establecimiento de protocolos de comunicaciones entre sistemas informáticos abiertos. No es una arquitectura, es un estándar que define cómo hacer un software de comunicaciones, descomponiendo el problema de la comunicación en 7 capas o niveles. Estos son: físico, enlace, red, transporte, sesión, presentación y aplicación.
El modelo OSI, explica qué se envían dos sistemas que quieren comunicarse, y las estructuras de datos utilizadas para ello. En cada nivel, hay definidas unas funciones que proporcionan unos servicios típicos de dicho nivel, ya sea por hardware o por software, los cuales se llevan a cabo siguiendo un protocolo del nivel. El proceso capa a capa es mostrado en la figura 14. Además en la figura 15 y 16 se resume el proceso que ejecuta cada capa y los datos circulantes en cada nivel.11
Figura 14.- Estructura del Modelo de Comunicación OSI
CAPÍTULO I. Marco Teórico y de Referencia
Figura 15.- Procesos del Modelo OSI
Figura 16.- PDU de las capas del Modelo OSI
ii
Modelo TCP/IP
El desarrollo actual de Internet, ha sido posible gracias a la utilización de esta pila de protocolos. Su extrema sencillez, ha facilitado la intercomunicación entre múltiples redes, y que se haya erigido como el protocolo de transmisión por antonomasia.
TCP/IP es el protocolo usado en Internet. Con este protocolo, tiene que funcionar cualquier ordenador que quiera utilizar cualquier servicio de Internet.
CAPÍTULO I. Marco Teórico y de Referencia
problema de interconectar distintas redes, divididas en subredes, enrutando el tráfico entre ellas.
Como la comunicación entre ordenadores es de una gran complejidad, el problema se ha dividido en otros menos complejos, creándose varios niveles. Cada nivel soluciona un problema en la comunicación, y tiene asociado uno o varios protocolos para ello. En la tabla 2 se muestra la jerarquía y estructura presente en el protocolo TCP/IP. Y en la figura 17 se representan los principales protocolos soportados por éste modelo.
Figura 17.- Estructura de los principales Protocolos TCP/IP
El modelo de red Internet tiene 4 capas o niveles, que son:
Aplicación: aquí están incluidos los protocolos destinados a proporcionar servicios, tales como transferencia de ficheros (FTP), navegación en Internet (HTTP), correo electrónico (SMTP), etc.
Transporte: aquí están incluidos los protocolos destinados a proporcionar el transporte de los datos, con la fiabilidad suficiente. En este nivel la información es dividida en paquetes, para que la transmisión sea más eficiente. Cuando llega al receptor, este mismo nivel se encarga de reordenar los paquetes y unirlos, para recomponer la información. Los protocolos que se encargan de esto, son: TCP y UDP.
Internet o Red: se encarga de enviar cada paquete de información a su destino, es decir, encaminar los datos. Para ello coloca los paquetes del anterior nivel en datagramas IP, y los envía al nivel inferior. Cuando recibe estos datagramas del nivel inferior, comprueba su dirección IP y los envía al nivel superior o los encamina a otro ordenador, si no son para éste. Los protocolos que actúan en este nivel, son:
IP
ICMP
CAPÍTULO I. Marco Teórico y de Referencia
ARP
RARP
BOOTP
Enlace: define el medio físico por el que se transmite la información (cable, ondas, etc.). La capa de enlace o acceso al medio, define la forma en que los ordenadores envían o reciben la información. Cuestiones como: de qué forma se transmite la información, en qué momento puede un ordenador transmitir, saber si el mensaje es para él o no; En este nivel se tienen protocolos como Ethernet, DLC (IEEE 802.2), X.25, Frame Relay.12
Tabla 2.- Modelo de Capas de TCP/IP
4 Aplicación HTTP, FTP, SMTP
3 Transporte TCP, UDP
2 Red Internet IP
Host de Red ICMP, ARP
1 Enlace
Acceso a la Red Ethernet, Token Ring Enlace Físico Tipo Cable
iii
Protocolo TCP
Es el protocolo de control de transmisión de la capa de transporte, que regula las cuestiones relativas al transporte de la información. Pertenece a la suite de protocolos TCP/IP. Este protocolo se encuentra descrito en el documento RFC 793. La estructura del paquete TCP se muestra en la tabla 3.
El protocolo TCP se encarga de regular el flujo de la información, de tal forma que éste se produzca sin errores y de una forma eficiente. Proporciona calidad de servicio. Por esto, se dice que este protocolo es:
Orientado a la conexión: esto significa que se establece una conexión entre emisor y receptor, previamente al envío de los datos. Se establece un circuito virtual entre los extremos. Este circuito crea la ilusión, por esto se llama virtual, de que hay un único circuito por el que viaja la información de forma ordenada. Ésto, en realidad no es cierto, la información viaja en paquetes desordenados por distintas vías hasta su destino y allí, tiene que ser reensamblados.
Fiable: significa que la información llega sin errores al destino. Por esto, la aplicación que usa este protocolo, no se tiene que preocupar de la integridad de la información, se da por hecho.
CAPÍTULO I. Marco Teórico y de Referencia
El protocolo TCP actúa de puente, entre la aplicación, que requiere los servicios, y el protocolo IP, que debe dirigir el tráfico por la red, hasta llegar a su destino. Este protocolo usa la tecnología de conmutación de paquetes. La unidad de información es el byte y éstos se agrupan en segmentos, que son pasados al protocolo IP. Estos segmentos viajan encapsulados en los datagramas IP. Es un flujo de información no estructurado, información binaria sin ningún formato. La aplicación de destino tiene que interpretar esta información. Los datos viajan en los segmentos junto a información de control. Usa una memoria intermedia llamada memoria temporal (buffer), para hacer más eficiente la transferencia. La transmisión es punto a punto, origen y destino, y full dúplex, es decir, en ambas direcciones, para hacer más eficaz el tráfico en la red.13
Antes de poder enviar información, hay que establecer una conexión entre los extremos. En una transmisión hay tres fases:
Apertura de conexión
Transferencia de datos
Cierre de conexión.
Tabla 3.- Paquete TPC
4bits 4bits 4bits 4bits 4bits 4bits 4bits 4bits Puerto TCP Origen Puerto TCP Destino
Número de Secuencia Número de acuse de recibo
HLEN Reservado Indicadores Ventana
Checksum TCP Marcador Urgente
Opciones Relleno
Datos
…
iv
Establecimiento de una conexión TCP
Para abrir la conexión se envían tres segmentos, por eso se llama "saludo de tres vías", el proceso se muestra en la figura 18 y se rige bajo los siguientes pasos:
El ordenador 1(O1), hace una apertura activa y envía un segmento TCP (S1), al ordenador 2 (O2). Este segmento lleva el bit SYN activado, y el primer nº de secuencia que usará para mandar sus segmentos.
O2 recibe el segmento (S1). Si desea abrir la conexión, responde con un segmento acuse de recibo (ACK), con el bit SYN activado, con ACK = x +1 y con
CAPÍTULO I. Marco Teórico y de Referencia
su propio nº de secuencia inicial (y), y deja abierta la conexión por su extremo. Si no desea abrir la conexión, envía un segmento, con el bit RST activado, a O1.
O1 recibe el segmento y envía su segmento de confirmación con ACK = y + 1.
O2 recibe la confirmación y decide que la conexión ha quedado abierta, y puede enviar mensajes también en el otro sentido.
Los números de secuencia usados (X y Y), son distintos en cada sentido y son aleatorios para evitar conflictos. A partir del paso 4 comienza la transmisión de datos hasta el final. Cuando ya no hay más datos que transferir, hay que cerrar la conexión. 14
Figura 18.- Proceso de Apertura de una Conexión TCP
v
Cierre de la conexión TCP
El proceso es una variación del saludo de tres vías y es representado en la figura 19:
O1 no tiene más datos para transferir. Envía un segmento TCP con el bit FIN activado y cierra la conexión activa, en el sentido de envío. La recepción está abierta todavía.
O2 recibe el segmento, informa a la aplicación receptora del cierre y devuelve la confirmación (ACK) a O1.
O1 recibe el ACK de O2.
O2 decide cerrar la comunicación y envía un segmento TCP con el bit FIN activado.
CAPÍTULO I. Marco Teórico y de Referencia
O1 lo recibe y envía un ACK a O2.
O2 lo recibe y cierra la conexión definitivamente.
Figura 19 .-Cierre de Conexión TCP
vi
Protocolo UDP
El Protocolo de Datagrama de Usuario (UDP). Proporciona una comunicación sencilla entre dos ordenadores, y que no consume muchos recursos. Pertenece a la capa de transporte.
Es un protocolo:
o No confiable: no hay un control de paquetes enviados y recibidos. Éstos pueden llegar erróneos o no llegar a su destino.
o No orientado a conexión: no se realiza una conexión previa entre origen y destino, como ocurre en el protocolo TCP.
Es un protocolo útil, en casos en los que no es necesario mucho control de los datos enviados. Se usa cuando la rapidez es más importante que la calidad, en los casos en que la información cabe en un único datagrama. Uno de sus usos más comunes es el envío de mensajes entre aplicaciones de dos ordenadores. No es tan fiable como el protocolo TCP, pero es simple, con baja sobrecarga de la red, y por lo tanto, ideal para aplicaciones que usen masivamente la red, como DNS y SNMP.
CAPÍTULO I. Marco Teórico y de Referencia
destino, en la cabecera UDP, se utiliza para dirigir el datagrama UDP a un proceso específico, que se está ejecutando en el ordenador destino. El número de puerto origen, permite al proceso contestar adecuadamente. No controla errores, cuando se detecta un error en un datagrama, se descarta. Esto hace que deban ser las aplicaciones que lo usen, las que controlen los errores, si les interesa.
UDP no numera los datagramas, tampoco utiliza confirmación de entrega, como ocurre en TCP. Esto hace que no hay garantía de que un paquete llegue a su destino, ni que los datagramas pueden llegar duplicados o desordenados a su destino.15
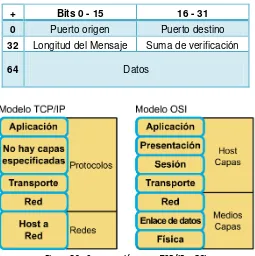
En la figura 20 se muestra una comparación, entre el modelo TCP/IP y el OSI
Tabla 4.- Paquete UDP
+ Bits 0 - 15 16 - 31
0 Puerto origen Puerto destino 32 Longitud del Mensaje Suma de verificación
[image:36.595.172.427.264.520.2]64 Datos
Figura 20.- Comparación entre TCP/IP y OSI
vii
Protocolo IP
Este protocolo, funciona transmitiendo la información por medio de paquetes. A este sistema se le conoce como "catenet". Da las normas para la transmisión de bloques de datos llamados datagramas, desde el origen al destino. Para hacer esto, identifica a los host origen y destino por una dirección de longitud fija, llamada dirección IP. Se encarga también, si fuera necesario, de la fragmentación y reensamblaje de grandes datagramas para su transmisión por redes de trama pequeña. Es un protocolo que pertenece a la capa de red.
CAPÍTULO I. Marco Teórico y de Referencia
Es un sistema de conmutación de paquetes no orientado a conexión, ya que cada paquete viaja independientemente de los demás; no fiable, los paquetes se pueden perder, duplicar o cambiar de orden. Es decir, este protocolo no soluciona estos problemas, esta tarea queda para otros protocolos.
Este protocolo utiliza, a su vez, protocolos de redes locales, que se encargan de llevar el datagrama IP a través de la red local hasta su salida, por medio de una pasarela (gateway), hasta la próxima red.
El protocolo IP realiza dos funciones básicas: direccionamiento y fragmentación.
Cada datagrama IP tiene una cabecera en la que figuran la dirección de origen y de destino. El módulo Internet usa estas direcciones para llevar el datagrama hasta su destino. Este proceso se llama encaminamiento o enrutamiento.
El módulo Internet usa campos en la cabecera para fragmentar y reensambla los datagramas IP, si fuera necesario, para su transmisión por redes de trama pequeña.
En cada host y en cada pasarela que interconecta redes, reside un módulo Internet. Estos módulos tienen reglas comunes para interpretar las direcciones y para fragmentar y reensamblar los datagramas IP. Estos módulos, en las pasarelas, saben cómo encaminar los datagramas IP. Cada datagrama IP, se trata como una entidad independiente, no relacionada con ningún otro datagrama IP. No existen conexiones o circuitos lógicos (virtuales o de cualquier otro tipo).
El protocolo Internet, utiliza cuatro mecanismos clave para prestar su servicio: Tipo de Servicio, Tiempo de Vida, Opciones y Suma de Control de Cabecera.
El Tipo de Servicio se utiliza para indicar la calidad del servicio deseado como prioridad, retardo, rendimiento, etc. El Tiempo de Vida es una indicación de un límite superior en el periodo de vida de un datagrama IP. Es fijado por el remitente del datagrama y reducido en 1, en cada router que atraviesa en su camino. Si el tiempo de vida se reduce a cero antes de que llegue a su destino, el datagrama IP es destruido. Las opciones proporcionan funciones de control necesarias o útiles en algunas situaciones. No son obligatorias.
La Suma de Control de Cabecera, sirve para verificar que la información ha sido transmitida correctamente. Si la suma de control de cabecera falla, el datagrama IP es descartado. Este control es sólo para la cabecera, no hay control de error para los datos en este nivel.
El protocolo Internet no proporciona ningún mecanismo de comunicación fiable, no existen acuses de recibo entre extremos, ni entre saltos. No existe control de flujo.
CAPÍTULO I. Marco Teórico y de Referencia
Figura 21.- Relación de IP con otros Protocolos de Red
El protocolo Internet interactúa por un lado, con los protocolos de la capa de transporte y por otro, con el protocolo de la red local.16
Tabla 5.- Datagrama IP
viii
Puertos y Zócalos (Sockets)
La noción de puerto, es introducida por la capa de transporte para distinguir entre los distintos destinos, dentro del mismo host, al que va dirigida la información. La capa de red solamente necesita, para dirigir la información entre dos ordenadores, las direcciones IP del origen y el destino. La capa de transporte añade la noción de puerto.
Un ordenador, puede estar ejecutando a la vez varios procesos distintos, por ello no es suficiente indicar la dirección IP del destino, además, hay que especificar el puerto al que va destinado el mensaje.
CAPÍTULO I. Marco Teórico y de Referencia
Cada aplicación utiliza un número de puerto distinto. Cuando una aplicación está esperando un mensaje, lo hace en un puerto determinado, se dice que está "escuchando un puerto".
Un puerto es un número de 16 bits, por lo que existen =65536 números de puerto posibles, en cada ordenador. Las aplicaciones utilizan estos puertos para enviar y recibir mensajes. Se llama conversación al enlace de comunicaciones entre dos procesos.
Aparte del concepto de puerto, la capa de transporte, usa el concepto de socket o zócalo. Los sockets son los puntos terminales de una comunicación, que pueden ser nombrados y direccionados en una red. Un socket está formado por la dirección IP del host y un número de puerto.
Una dirección de socket está formada por la tripleta:
{protocolo, dirección local, proceso local}
Por ejemplo, en el protocolo TCP/IP un socket sería: {tcp, 193.53.214.3, 1345}
Si una aplicación cliente quiere comunicarse con una aplicación servidora de otro host, el protocolo TCP, le asigna un número de puerto libre, en el otro extremo, la aplicación servidora permanece a la escucha en su puerto bien conocido. Por ejemplo, el envío de correo con el protocolo POP3, utiliza el número de puerto 110. Para que la transmisión sea más eficaz, los puertos usan una memoria intermedia, llamada "buffer". Existe un buffer en el origen, usado por la aplicación cliente, y otro en el destino, donde se van almacenando los datos enviados hasta que los pueda recoger la aplicación receptora.
Los primeros 256 puertos son los llamados "puertos bien conocidos" (well-known), y se usan para servicios comunes, como HTTP, FTP, etc. TCP asigna los números de puerto bien conocidos, para aplicaciones servidoras (aquellas que ofrecen servicios) y el resto de los números disponibles a las aplicaciones cliente (aquellas que solicitan servicios), según los van necesitando.17
Los números de puerto tienen asignado los siguientes intervalos:
Del 0 al 255 se usan para aplicaciones públicas.
Del 255 al 1023 para aplicaciones comerciales.
Del 1023 en adelante, no están regulados.
Los puertos bien conocidos están definidos en la RFC 1700, los puertos más usados se muestran en la tabla 6.
CAPÍTULO I. Marco Teórico y de Referencia
Tabla 6.- Puertos TCP más usados
Palabra Clave Puerto Descripción
cho 7/tcp/udp Eco
daytime 13/tcp/udp Fecha y Hora
ftp 21/tcp Protocolo de Transferencia de Ficheros
telnet 23/tcp Telnet
smtp 25/tcp Protocolo de Correo Sencillo
domain 53/TCP-UDP Servidor de Nombres de Dominio DNS
gopher 70/TCP Gopher
www-http 80/TCP World Wide Web HTTP (servicio de páginas Web)
pop3 110/TCP Post Office Protocol- Versión 3
irc 194/TCP Internal Relay Chat Protocol (Protocolo de Internet de Chat)
ix
Clases de direcciones IP
Existen cinco clases de direcciones IP, según la manera de repartir los bits entre la dirección de red y el número de host. Esta idea pretende asignar direcciones de red que se adapten a las necesidades de los usuarios. Si se tiene una red, en donde la máscara de subred es del tipo 255.0.0.0, puede llegar a tener 2563 direcciones de host mientras que si la máscara de subred es 255.255.255.0 sólo podrá haber 256 direcciones de host distintas.
Utilizando las direcciones IP y las máscaras de subred se definen tres tipos de redes, como los muestra la tabla 7:
Tabla 7.- Clases de Direcciones IP
Máscara de subred
Rango Número
Redes Host
Clase A 255.0.0.0 1.0.0.0 - 126.255.255.255 127 16777214
Clase B 255.255.0.0 1.0.0.0 - 126.255.255.255 16384 65534
Clase C 255.255.255.0 192.0.0.0 - 223.255.255.255 2097151 254
Clase (D) 224.0.0.0 - 239.255.255.255 histórico
Clase (E) 240.0.0.0 - 255.255.255.255 histórico
La clase que se elija para una red dada, dependerá del número de máquinas que tenga y las que se prevean en el futuro. Como se mencionó el número de red es asignado por el NIC o por el organismo de cada país en quien él delegue. El número de host lo asignará el administrador que controla la red.18
CAPÍTULO I. Marco Teórico y de Referencia
x
Dirección IP Privadas
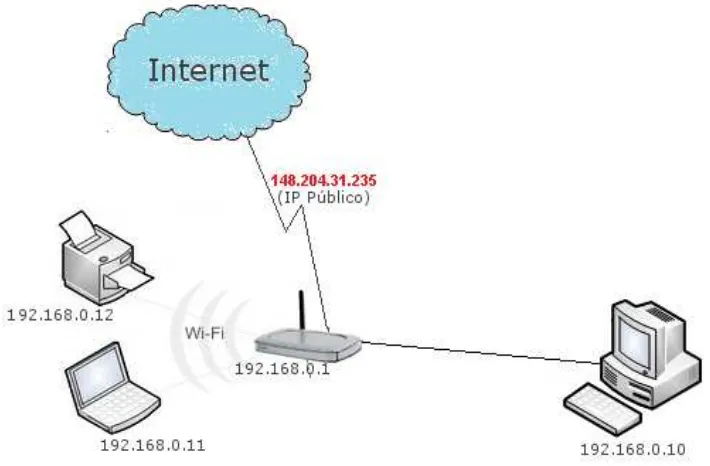
Las redes privadas que no están directamente conectadas a Internet, esto es, las redes que se conectan por medio de un proxy o un router a una única línea con una sola dirección IP Pública, dada por un proveedor de servicios, y tienen asignados unos rangos de direcciones IP para su funcionamiento interno. Los rangos en cada clase se representan en la tabla 8.
Tabla 8.- Rangos de direcciones IP Privadas
Rango
Clase A 10.0.0.0 - 10.255.255.255
Clase B 172.16.0.0 - 172.31.255.255
Clase C 192.168.0.0 - 192.168.255.254
Estas direcciones IP, no son utilizadas por los routers para su comunicación con Internet, y se utilizan sólo dentro de la organización. Estas redes (Intranet), tienen la ventaja de ser mucho menos accesibles a ataques desde el exterior.19 En la figura 22 se representa la aplicación de una IP privada en una red.
Figura 22.- Red Privada y Proxy para Internet
xi
Dirección IP Pública
Internet también es una red de ordenadores. De hecho es una enorme red de redes, y cada una de ellas necesita un identificador IP propio y único en toda Internet. Esta dirección IP pública, es la que identifica unívocamente en toda internet. Regularmente estas clases de IP son utilizadas por los servidores o routers, que son principalmente
CAPÍTULO I. Marco Teórico y de Referencia
[image:42.595.118.473.116.349.2]los equipos que se conectan a Internet.20 En la figura 23 se muestra una topología de una dirección IP pública contra una privada.
Figura 23.- Topología de una IP Pública
xii
Dirección IP Estática
Son las IP que se encuentran fijas para un dispositivo, el cual no requiere un cambio contante de IP, regularmente son usadas por Servidores, Routers y dispositivos que requieran siempre tener la misma dirección IP, ya que por medio de ella encontraran al dispositivo asociada a esa IP. Estas IP son configuradas manualmente en base a la dirección MAC del equipo. Estas IP pueden ser Privadas o Públicas.
xiii
Dirección IP Dinámica
Son las IP que se encuentran en constante cambio en una red, es un método empleado para la reutilización de las direcciones en una red, su uso primordial se basa en que se piensa que no todos los equipos o dispositivos de una red, están conectados a la vez a la red, por lo tanto, esta dirección se presta al dispositivo por un tiempo asignado por el administrador, y este último se vale de un DHCP, que es un protocolo que permite asignar direcciones IP dinámicas a un dispositivo.
CAPÍTULO I. Marco Teórico y de Referencia
xiv
DHCP
El Protocolo de Configuración Dinámica de Host o DHCP, por sus siglas en inglés, es un protocolo de Red que provee a los dispositivos de una red, la capacidad de obtener una dirección IP automáticamente. Se trata de un protocolo Cliente/Servidor. El proceso para la asignación y obtención de una dirección IP usando este protocolo, sigue los siguientes pasos:
1. DHCP Discovery: Es una solicitud DHCP realizada por un cliente de este protocolo, para que el servidor DHCP de dicha red le asigne una Dirección IP y otros parámetros DHCP, como la máscara de red o el nombre DNS.
2. DHCP Offer: Es el paquete de respuesta del Servidor DHCP a un cliente DHCP, ante su petición de la asignación de los Parámetros DHCP. Para ello involucra su dirección MAC.
3. DHC Request: El cliente selecciona la configuración de los paquetes recibidos de DHCP Offer. Una vez más, el cliente solicita una dirección IP específica que indicó el servidor.
4. DHCP Acknowledge: Cuando el servidor DHCP recibe el mensaje DHCP- REQUEST del cliente, se inicia la fase final del proceso de configuración. Esta fase implica el reconocimiento y el envío de un paquete DHCP-ACK al cliente. Este paquete incluye la duración y cualquier otra información de configuración. El servidor reconoce la solicitud y envía acuse de recibo al cliente. El sistema en su conjunto espera que el cliente configure su interfaz de red con las opciones suministradas. Y el proceso habrá concluido, como lo muestra la figura 24 .21
1.5
HTTP
El Protocolo de Transferencia de HiperTexto (Hypertext Transfer Protocol) es un protocolo cliente-servidor que articula los intercambios de información entre los clientes Web y los servidores HTTP.
21 Ver Referencia [8]
DHCP Discovery DHCP Offer DHCP Request
DHCP Acknowledge
Cliente DHCP Servidor DHCP
CAPÍTULO I. Marco Teórico y de Referencia
Se diseñó específicamente para la WWW: es un protocolo rápido y sencillo, que permite la transferencia de múltiples tipos de información de forma eficiente y rápida. Se puede comparar, por ejemplo, con FTP, que es también un protocolo de transferencia de ficheros, pero tiene un conjunto muy amplio de comandos, y no se integra demasiado bien en las transferencias multimedia.
HTTP está soportado por los servicios de conexión TCP/IP. Cada vez que un cliente realiza una petición a un servidor, se ejecutan los siguientes pasos:
1. Un usuario accede a una URL, seleccionando un enlace de un documento HTML o introduciéndola en el navegador.
2. El cliente Web descodifica la URL, separando sus diferentes partes. Así identifica el protocolo de acceso, la dirección DNS o IP del servidor, el posible puerto opcional (el valor por defecto es 80) y el objeto requerido del servidor. 3. Se abre una conexión TCP/IP con el servidor Web, llamando al puerto TCP
correspondiente (80).
4. Se realiza la petición. Para ello, se envía el comando necesario (GET, POST, HEAD), la dirección del objeto requerido (el contenido de la URL que sigue a la dirección del servidor), la versión del protocolo HTTP empleada (casi siempre HTTP/1.0) y un conjunto variable de información, que incluye datos sobre las
apa idades del a egado , datos op io ales pa a el se ido …
5. El servidor devuelve la respuesta al cliente. Consiste en un código de estado y el tipo de dato MIME de la información de retorno, seguido de la propia información.
6. Se cierra la conexión TCP.
Este proceso se repite en cada acceso al servidor HTTP. Por ejemplo, si se recoge un documento HTML, en cuyo interior están insertadas cuatro imágenes, el proceso anterior se repite cinco veces, una para el documento HTML y cuatro para las imágenes.
Elementalmente se dice de http, que:
Es protocolo simple de solicitud-repuesta.
Es usado por las aplicaciones Web.
Usa el HTML como lenguaje de transmisión.