INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
MAESTRÍA EN CIENCIAS EN INGENIERÍA DE TELECOMUNICACIONES
Tesis que para Obtener el Grado de Maestro en Ciencias en Ingeniería en
Telecomunicaciones
Presenta
Ing. Luis Rosales Roldan
Título
Diseño de un Filtro Tipo Wavelet Utilizando los Polinomios de Chebyshev
Director de Tesis
M. en C. Marco Antonio Acevedo Mosqueda
Resumen
Existen cinco tipos de polinomios de Chebyshev y en este trabajo se utilizan los coeficientes de cualquiera de estos cinco tipos de polinomios de Chebyshev para definir la respuesta al impulso de un filtro pasa-altas en el diseño de un banco de filtros de cuadratura. Como primer paso se seleccionan los coeficientes Chebyshev, estos proporcionan la respuesta al impulso del filtro pasa-altas de síntesis. Partiendo de los coeficientes del filtro pasa-altas se encuentra la respuesta al impulso de los filtros pasa bajas y altas de análisis y el filtro pasa-bajas de síntesis. Una vez construidos estos cuatro filtros se procede a comprobar qué tanto cumplen o se acercan a las condiciones de un filtro Wavelet. Una vez revisadas sus características se hace una comparación con la respuesta de los filtros de una Wavelet Haar para así tener una idea de su comportamiento. Finalmente, se realizan algunas aplicaciones con los filtros propuestos.
Abstract
Índice
Páginas
Índice i
Índice de Figuras iii
Índice de Tablas vi
Objetivo ix
Justificación x
Resumen xi
Introducción xii
Capítulo 1. Estado del Arte
Capítulo 2. Conceptos Básicos
2.1. Polinomios de Chebyshev 3
2.1.1. Polinomios de Chebyshev del Primer Tipo 3
2.1.2. Propiedades de los polinomios de Chebyshev del
Primer Tipo 5
2.1.3. Existencia de los polinomios de Chebyshev para valores de x 1
7
2.2. Polinomios de Chebyshev del Segundo Tipo 10
2.3. Polinomios de Chebyshev de Tercer y Cuarto Tipo. 12
2.4. Filtros Digitales 15
2.4.1. Ventajas de los Filtros Digitales 17
2.4.2. Filtros IIR 17
2.4.3. Filtros FIR 19
2.4.4. Ventajas y desventajas de los filtros IIR y FIR 20
2.5. Transformada Wavelet 21
2.5.1. Banco de Filtros de dos canales. 22
2.5.2. Filtros de Cuadratura-Espejo y Filtros de Cuadratura Conjugados
25
2.5.3. Diezmado/Interpolación 26
2.5.3.1. Ejemplos utilizando Diezmado/Interpolación 27
2.6. Transformada Wavelet Discreta 29
2.7. Transformada Wavelet Haar 30
2.8. Transformada Wavelet Daubechies 33
2.9. Propiedades de las Wavelets 37
2.10. Transformada Wavelet en dos dimensiones. 39
Capítulo 3. Propuesta
3.1. Filtros FIR utilizando los coeficientes de Chebyshev 49
3.2. Análisis de Resultados 69
Capítulo 4. Pruebas y Resultados
4.1. Análisis/Síntesis de una secuencia de datos 70
4.1.1. Objetivo 70
4.1.2. Desarrollo 70
4.1.3. Análisis de Resultados 77
4.1.4. Conclusiones 78
4.2. Análisis/Síntesis de un archivo de audio 79
4.2.1. Objetivo 79
4.2.2. Desarrollo 79
4.2.3. Análisis de Resultados 84
4.2.4. Conclusiones 84
4.3. Análisis/Síntesis de un archivo bidimensional, una imagen. 85
4.3.1. Objetivo 85
4.3.2. Desarrollo 86
4.3.3. Análisis de Resultados 94
4.3.4. Conclusiones 94
4.4. Reducción de Ruido en Audio 95
4.4.1. Objetivo 95
4.4.2. Desarrollo 95
4.4.3. Conclusiones 109
4.5. Reducción de Ruido en Imágenes 110
4.5.1. Objetivo 110
4.5.2. Desarrollo 110
4.5.3. Análisis de Resultados 119
4.5.4. Conclusiones 119
4.6. Resultados en esteganografía 120
4.6.1. Objetivo 120
4.6.2. Desarrollo 120
4.6.3. Conclusiones 124
Capítulo 5. Conclusiones
Trabajos Futuros 127
Índice de Figuras
Páginas
Capítulo 2.
Figura 2.1. Gráfica de los 8 primeros polinomios de Chebyshev de Primer Tipo
5
Figura 2.2. Gráfica de los respectivos dominios de definición. 10 Figura 2.3. Gráfica de los primeros 8 polinomios de Chebyshev de
Segundo Tipo
12
Figura 2.4. (a) Gráfica de los polinomios de Chebyshev del Tercer
Tipo. (b) Gráfica de los polinomios de Chebyshev del Cuarto Tipo. 15 Figura 2.5. Representación proceso de filtrado digital. 16 Figura 2.6. Estructura de un Filtro IIR. 18 Figura 2.7. Estructura de un Filtro FIR 20
Figura 2.8. Filtro de Análisis 22
Figura 2.9. Filtro de Síntesis 22
Figura 2.10. Banco de Filtros de Dos Canales 23 Figura 2.11. Filtro Cuadratura-Espejo para la Transformada Haar 25 Figura 2.12. Filtro de Cuadratura Conjugado para la
Transformada Haar
26
Figura 2.13. (a) Diagrama básico del diezmado. (b) Diagrama básico del interpolado.
26
Figura 2.14. Un banco de filtros simple para demostración de
diezmado/interpolación 27
Figura 2.15. Diagrama reducido de un banco de filtros simple para demostración de diezmado/interpolación.
28
Figura 2.16. Ejemplo del comportamiento de un banco de filtros simple.
28
Figura 2.17. Estructura de un filtro de cuadratura-espejo de dos-canales.
29
Figura 2.18. Respuesta en frecuencia de los filtros de la Wavelet Haar.
31
Figura 2.19. Proceso de análisis de la Wavelet Haar. 31 Figura 2.20. Proceso de síntesis de la Wavelet Haar. 32 Figura 2.21. Respuesta en frecuencia de los filtros de la Wavelet
db2.
34
Figura 2.22. Proceso de análisis de la Wavelet db2. 35 Figura 2.23. Proceso de síntesis de la Wavelet db2. 36
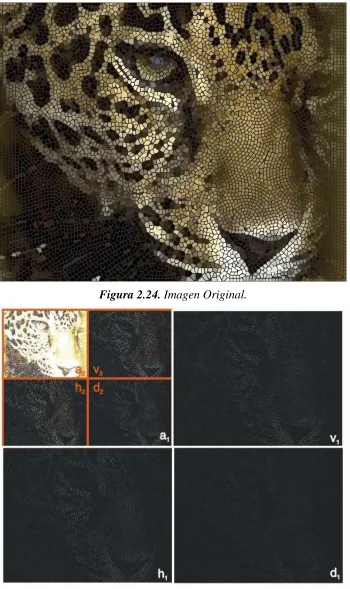
Figura 2.24. Imagen Original. 40
Figura 2.29. Proceso de síntesis, transformada bidimensional. 44 Figura 2.30. Diagrama Análisis/Síntesis. 46
Capítulo 3.
Figura 3.1. Respuesta en magnitud y fase de los coeficientes obtenidos mediante el polinomio de Chebyshev del cuarto orden y de primer tipo.
51
Figura 3.2. Respuesta en magnitud del filtro tipo Wavelet de Chebyshev de cuarto orden y primer tipo.
53
Figura 3.3. Estructura de un filtro de cuadratura-espejo de dos-canales.
58
Figura 3.4. Respuesta en magnitud filtro tipo Wavelet de Chebyshev de segundo orden primer tipo y la Wavelet Haar.
60
Figura 3.5. Respuesta en magnitud filtro tipo Wavelet de Chebyshev de segundo orden segundo tipo y la Wavelet Haar.
62
Figura 3.6. Respuesta en magnitud filtro tipo Wavelet de
Chebyshev de segundo orden tercer tipo y la Wavelet Haar. 64 Figura 3.7. Respuesta en magnitud filtro tipo Wavelet de
Chebyshev de segundo orden cuarto tipo y la Wavelet Haar.
66
Figura 3.8. Respuesta en magnitud filtro tipo Wavelet de Chebyshev de segundo orden quinto tipo y la Wavelet Haar.
68
Capítulo 4.
Figura 4.1. Proceso de descomposición pasa-bajas. 71 Figura 4.2. Proceso de descomposición pasa-altas. 72 Figura 4.3. Proceso de reconstrucción del filtro pasa-bajas. 74 Figura 4.4. Proceso de reconstrucción del filtro pasa-altas. 75 Figura 4.5. Archivo de audio utilizado para el proceso de
descomposición/reconstrucción. 79
Figura 4.6. Proceso de análisis. 80
Figura 4.7. Canal izquierdo del archivo de audio. 81 Figura 4.8. (a) Señal aproximada, (b) detalles del archivo. 81
Figura 4.9. Proceso de síntesis. 82
Figura 4.10. Archivo de audio recuperado. 83 Figura 4.11. Imagen empleada para el proceso de
descomposición/reconstrucción.
85
Figura 4.12. Imagen a color junto con sus 3 sub-matrices. 86 Figura 4.13. Etapa de análisis para una imagen. 87 Figura 4.14. (a) Sub-imagen aproximada, (b) sub-imagen de
detalles horizontales.
89
Figura 4.14. (c) Sub-imagen de detalles verticales, (d) sub-imagen de detalles diagonales.
89
Figura 4.15. Etapa de síntesis para una imagen 90
Figura 4.17. Diagrama a bloques para la obtención de los umbrales
95
Figura 4.18. Archivo de audio original. 96 Figura 4.19. Archivo de audio con ruido. 96 Figura 4.20. Esquema completo para la reducción de ruido. 96 Figura 4.21. Sub-señales de xr
n . 97 Figura 4.22. Aplicación de umbral para la reducción de ruido. 98 Figura 4.23. Proceso final de filtrado para la reducción de ruido. 99 Figura 4.24. Archivo de audio filtrado. 100 Figura 4.25. Diagrama a bloques para la obtención de losumbrales. 110
Figura 4.26. (a) Imagen Radar Original, (b) Imagen Radar con Ruido.
111
Figura 4.27. Esquema completo para la reducción de ruido. 112 Figura 4.28. Sub-imágenes de xr
m,n . 113 Figura 4.29. Aplicación de umbral para la reducción de ruido. 113 Figura 4.30. Proceso final de filtrado para la reducción de ruido. 114Figura 4.31. Imagen recuperado. 116
Figura 4.32. Esquema de un proceso de esteganografía. 121
Figura 4.33. Mensaje a Ocultar. 121
Figura 4.34. Archivo de Audio sobre el cual se va a ocultar un mensaje.
121
Figura 4.35. Archivo de Audio donde se encuentra oculto un mensaje.
Índice de Tablas
Páginas
Capítulo 3.
Tabla 3.1. Coeficientes normalizados de los diferentes tipos de polinomios de Chebyshev.
57
Tabla 3.2. Comparativa de condiciones de una Wavelet con respecto al filtro tipo Wavelet obtenido a través de los polinomios de Chebyshev del Primer Tipo.
59
Tabla 3.3. Comparativa de condiciones de una Wavelet con respecto al filtro tipo Wavelet obtenido a través de los polinomios de Chebyshev del Segundo Tipo.
61
Tabla 3.4. Comparativa de condiciones de una Wavelet con respecto al filtro tipo Wavelet obtenido a través de los polinomios de Chebyshev del Tercer Tipo.
63
Tabla 3.5. Comparativa de condiciones de una Wavelet con respecto al filtro tipo Wavelet obtenido a través de los polinomios de Chebyshev del Cuarto Tipo.
65
Tabla 3.6. Comparativa de condiciones de una Wavelet con respecto al filtro tipo Wavelet obtenido a través de los polinomios de Chebyshev del Quinto Tipo.
67
Capítulo 4.
Tabla 4.1. Proceso de descomposición del filtro pasa-bajas. 72 Tabla 4.2. Proceso de descomposición del filtro pasa-altas. 73 Tabla 4.3. Proceso de reconstrucción del filtro pasa-bajas. 75 Tabla 4.4. Proceso de reconstrucción del filtro pasa-altas. 76 Tabla 4.5. Resultados del Proceso de Análisis/Síntesis de los
polinomios de Chebyshev.
77
Tabla 4.6. Índice de correlación para ordenes diferentes de los polinomios de Chebyshev.
84
Tabla 4.7. Índice de correlación para ordenes diferentes de los polinomios de Chebyshev.
93
Tabla 4.8. Comparación entre Wavelets y Chebyshev Primer Tipo con Ruido de 50 dB.
100
Tabla 4.9. Comparación entre Wavelets y Chebyshev Primer Tipo con Ruido de 30 dB.
101
Tabla 4.10. Comparación entre Wavelets y Chebyshev Primer Tipo con Ruido de 20 dB.
101
Tabla 4.11. Comparación entre Wavelets y Chebyshev Primer Tipo con Ruido de 15 dB.
102
con Ruido de 10 dB.
Tabla 4.13. Comparación entre Wavelets y Chebyshev Segundo Tipo con Ruido de 50 dB.
102
Tabla 4.14. Comparación entre Wavelets y Chebyshev Segundo
Tipo con Ruido de 30 dB. 103
Tabla 4.15. Comparación entre Wavelets y Chebyshev Segundo Tipo con Ruido de 20 dB.
103
Tabla 4.16. Comparación entre Wavelets y Chebyshev Segundo
Tipo con Ruido de 15 dB. 103
Tabla 4.17. Comparación entre Wavelets y Chebyshev Segundo Tipo con Ruido de 10 dB.
104
Tabla 4.18. Comparación entre Wavelets y Chebyshev Tercer Tipo
con Ruido de 50 dB. 104
Tabla 4.19. Comparación entre Wavelets y Chebyshev Tercer Tipo
con Ruido de 30 dB. 104
Tabla 4.20. Comparación entre Wavelets y Chebyshev Tercer Tipo con Ruido de 20 dB.
105
Tabla 4.21. Comparación entre Wavelets y Chebyshev Tercer Tipo
con Ruido de 15 dB. 105
Tabla 4.22. Comparación entre Wavelets y Chebyshev Tercer Tipo con Ruido de 10 dB.
105
Tabla 4.23. Comparación entre Wavelets y Chebyshev Cuarto Tipo con Ruido de 50 dB.
106
Tabla 4.25. Comparación entre Wavelets y Chebyshev Cuarto Tipo
con Ruido de 30 dB. 106
Tabla 4.25. Comparación entre Wavelets y Chebyshev Cuarto Tipo con Ruido de 20 dB.
106
Tabla 4.26. Comparación entre Wavelets y Chebyshev Cuarto Tipo
con Ruido de 15 dB. 107
Tabla 4.27. Comparación entre Wavelets y Chebyshev Cuarto Tipo con Ruido de 10 dB.
107
Tabla 4.28. Comparación entre Wavelets y Chebyshev Quinto Tipo
con Ruido de 50 dB. 107
Tabla 4.29. Comparación entre Wavelets y Chebyshev Quinto Tipo
con Ruido de 30 dB. 108
Tabla 4.30. Comparación entre Wavelets y Chebyshev Quinto Tipo con Ruido de 20 dB.
108
Tabla 4.31. Comparación entre Wavelets y Chebyshev Quinto Tipo
con Ruido de 15 dB. 108
Tabla 4.32. Comparación entre Wavelets y Chebyshev Quinto Tipo con Ruido de 10 dB.
109
Tabla 4.33. Comparación entre Wavelets y Chebyshev del Primer
Tipo. 117
Tipo.
Tabla 4.35. Comparación entre Wavelets y Chebyshev del Tercer Tipo.
118
Tabla 4.36. Comparación entre Wavelets y Chebyshev del Cuarto Tipo.
118
Tabla 4.37. Comparación entre Wavelets y Chebyshev del Quinto Tipo.
119
Tabla 4.38. Comparación entre Wavelets y Chebyshev de Primer y Segundo Tipo.
123
Tabla 4.39. Comparación entre Wavelets y Chebyshev de Tercer y Cuarto Tipo.
124
Tabla 4.40. Comparación entre Wavelets y Chebyshev de Quinto
Justificación
Objetivos
Objetivo General
Utilizar los coeficientes de los Polinomios de Chebyshev para la construcción de un filtro tipo Wavelet.
Objetivos Específicos
Desarrollar un método implementando los coeficientes de Chebyshev con la finalidad de construir Filtros de Cuadratura-Espejo (QMF).
Desarrollar filtros tipos Wavelets y comprobar si los coeficientes obtenidos a través Polinomios de Chebyshev cumplen o se acercan a las condiciones de una Wavelet.
Capítulo 1
Estado del Arte
En el año 2003 Luiz C. R. de Barcellos, Sergio L. Netto y Paulo S. R. Diniz publicaron un artículo titulado “OPTIMIZATION OF FRM FILTERS USING THE WLS-CHEBYSHEV APPROACH” en la revista Circuits systems signal processing, este artículo explica cómo combinar FRM, el cual es un respuesta de enmascaramiento utilizada como alternativa para el diseño de filtros FIR (Respuesta Finita al Impulso) de fase lineal, y WLS-Chebyshev, el cual es la aplicación de mínimos cuadrados ponderados utilizada para intentar minimizar la energía total de la banda de rechazo y el máximo rizado simultáneamente, los pesos de los WLS es una matriz la cual es modificado mediante iteraciones de acuerdo a un valor de error de la iteración anterior. Con esta combinación se logra un mejor rendimiento ante la presencia de ondas expansivas y/o la atenuación de la banda de rechazo, primeramente se realiza un proceso iterativo para lograr obtener un filtro base para posteriormente realizar un enmascaramiento del filtro y así reducir al mínimo el margen de error previamente obtenido en el filtro anterior.
Ese mismo año y en esta misma revista Xiaoping Lai publica el artículo titulado “CHEBYSHEV DESIGN OF FIR FILERS WITH FREQUENCY INEQUALITY CONSTRAINTS” este artículo explica como utilizar una norma de Chebyshev para medir el error de un filtro FIR (Respuesta Finita al Impulso) diseñado. Para el diseño de filtros FIR Chebyshev se implementó el algoritmo de Remez en un programa, el cual no sólo reduce al mínimo el error de un filtro, sino también especifica los límites de error que no deben sobrepasarse. Se propone un algoritmo iterativo, así como un programa en MATLAB, este algoritmo utiliza el algoritmo Remez Chebyshev como núcleo de las iteraciones, con este algoritmo el error máximo en algunas bandas de frecuencia entra dentro de los valores mínimos, por último como referencia se muestra un algoritmo con las mismas especificaciones, pero solo para el diseño de un filtro pasa-bajas.
se desarrolla un método automatizado para determinar con precisión y rápidamente la localización de sub-células de proteínas no caracterizadas. Para obtener una tasa de éxito en las predicciones de la localización de estas sub-células se introducen tres pseudo-aminoácidos a través de los índices de Lyapunov, la función Bessel y por último se utiliza un filtro de Chebyshev para hacerle frente al caos y a la complejidad de las secuencias proteínicas.
En el año 2009 Orlov, N.V. Delaney, J. Eckley, D.M. Shamir, L. Goldberg, I.G. publicaron un artículo titulado “PATTERN RECOGNITION FOR BIOMEDICAL IMAGING AND IMAGE-GUIDED DIAGNOSIS” este artículo explica cómo las técnicas de reconocimiento de patrones puede ser utilizadas para analizar gran variedad de imágenes biomédicas, uno de los problemas que se presentan para la aplicación de esta técnica es la cantidad de imágenes que se tiene que caracterizar, por lo tanto se requiere el desarrollo de una amplia variedad de características de imágenes. En el estudio se comprueban la eficiencia de diferentes técnicas para la construcción de estas características, una de ellas consiste en un banco de derivadores, este banco se enfoca en obtener las texturas, los histogramas y las estadísticas de estas imágenes. Los resultados muestran mejores resultados en imágenes transformadas mediante Fourier, Wavelets o Chebyshev y aplicando simplemente un conjunto de filtros a la imagen. Esta técnica se utilizó para analizar imágenes de biopsias de tejidos de cáncer: linfomas y melanomas. La exactitud de la clasificación de estos conjuntos de datos de cáncer fue del 97%.
Introducción
Existen diferentes tipo de archivo, como lo son archivos de audio y archivos de imágenes, estos archivos pueden presentar alguna alteración o modificación, denomina ruido. Este ruido, con ayuda de filtros puede verse atenuado o reducido, ya sea de forma analógica o digital, en este trabajo se presentan filtros digitales para el procesamiento de señales, uno de los principales filtros que se utilizan para la reducción del ruido en estos tipos de archivos son las Wavelets, las cuales son filtros de compresión con pérdidas, de aquí que se utilizan en archivos de audio o imágenes, ya que en estos las pérdidas no son tan notorias para el oído y la vista. Así mismo estas Wavelets desempeñan un papel importante para el procesamiento de señales, ya sea para análisis, síntesis, filtrado, compresión etc. En la actualidad estos filtros también permiten realizar otro tipo de aplicaciones, como son la esteganografía, las marcas de agua y reconocimiento facial.
metodologías son los polinomios de Chebyshev. En una aplicación particular los polinomios pueden utilizarse para cambiar la forma del patrón de radiación de un arreglo de antenas, modificando la corriente de cada elemento de antena a través de filtros. De aquí surge la idea de poder implementar estos polinomios de Chebyshev para el diseño de filtros. Existen cinco diferentes tipos de polinomios de Chebyshev, en este trabajo, los cinco tipos de polinomios de Chebyshev son implementados para construir un filtro tipo Wavelet, de estos se mencionan sus propiedades importantes, características, así como las gráficas de algunos de ellos. En la actualidad la aplicación de filtros con los polinomios de Chebyshev es de carácter analógico, no digital.
Los coeficientes de los polinomios de Chebyshev de los cinco tipos existentes, los cuales son obtenidos mediante fórmulas recurrentes, se implementan en un filtro FIR y se grafica su respuesta en magnitud y fase. Esta gráfica muestra que el comportamiento de los coeficientes nos da la respuesta al impulso de un filtro pasa-altas. Una vez obtenido este filtro comprobamos algunas de sus características y procedemos a construir los otros tres filtros que constituye a un filtro de cuadratura-espejo de dos canales. En este trabajo se propone al filtro pasa-altas obtenido como el filtro pasa-altas de reconstrucción del filtro de cuadratura-espejo.
Ya que el filtro ha sido propuesto como el filtro pasa-altas de reconstrucción, se calculan, con la ayuda de sus coeficientes, los coeficientes de los filtros pasa-altas de análisis, pasa-bajas de análisis y pasa-bajas de síntesis. Una vez obtenidos los coeficientes de los demás filtros del banco de filtros de cuadratura, estos se utilizan para conformar un filtro Wavelet, de este filtro Wavelet, se grafican sus respuestas al impulso y se verifican si cumplen con las características de este tipo de filtros. Cabe mencionar, que a pesar de que este tipo de filtro no cumplen con las características de una Wavelet, se puede llevar a cabo el proceso de análisis y reconstrucción de forma excelentes.
Una vez realizadas estas acciones y como demostración, se presentan algunas aplicaciones de análisis-reconstrucción, en archivos de audio e imágenes, reducción de ruido en archivos de audio e imágenes radar y por último, se realiza un proceso sencillo de esteganografía sobre un archivo de audio.
así como la comparación con algunas de las Wavelets existentes más comunes, como los son: la Wavelet Haar, db2, db3, db4 y db5, se llega a las conclusiones finales de este trabajo.
Organización de la Tesis
Capítulo 1. Describe el estado del arte de esta tesis, mostrando una pequeña introducción del contenido en general de la misma, así mismo el objetivo general, los objetivos específicos y la justificación.
Capítulo 2. Describe a los diferentes tipos de polinomios de Chebyshev que existen, los cinco diferentes tipos de estos, su comportamiento, como obtener cada polinomio de Chebyshev de cualquier tipo mediante fórmulas recurrentes, así como algunas gráficas de su comportamiento de los diferentes tipos de polinomios y sus principales características. Así mismo se muestra una explicación de los principales tipos de filtros digitales, Filtros de Respuesta Finita al Impulso y los Filtros de Respuesta infinita al Impulso, también acerca de los Filtros de Cuadratura Espejo y una de sus aplicaciones, la cual es la construcción de filtros Wavelets. Estos filtros tienen diversas aplicaciones tales como, compresión de archivos, análisis y recontracción, reducción de ruido y esteganografía, todas estas aplicaciones se llevan acabo con archivos unidimensionales (audio) y archivos bidimensionales (imágenes).
Capítulo3. Realiza una descripción de cómo llegar a la construcción del filtro Tipo Wavelet a partir de los coeficientes obtenidos a través de los polinomios de Chebyshev de cualquiera de los cinco tipos mencionados en el capítulo 2, su comportamiento, propiedades y sus características principales.
la finalidad de comprobar el funcionamiento del filtro tipo Wavelet propuesto, no con el objetivo de demostrar o descubrir una aplicación en particular.
Capítulo 2
Conceptos Básicos
2.1. Polinomios de Chebyshev
Los polinomios de Chebyshev (CHPs) tienen aplicaciones en el campo de aproximaciones polinomiales, análisis numérico, series de Fourier entre otras. Y se pueden obtener directamente por medio de fórmulas trigonométricas de senos y cosenos.
Es bien sabido que los CHPs tienen amplias aplicaciones en varios campos de matemáticas y física. Los CHPs combinan características útiles de la serie de Fourier (a las que están relacionados) y simplicidad de análisis de polinomios. Dado que los CHPs son polinomios eficientes para aproximar funciones arbitrarias, tienen amplias aplicaciones en análisis numérico. Existen varios enfoques posibles para el problema de una curva apropiada. Los polinomios de Chebyshev del primer tipo (CHPs-I) también son utilizados para esquemas de cuadratura, para encontrar la integral de una función no singular definida sobre un rango finito [1-4].
Por la relación discreta de ortogonalidad de los CHPs, se comprueba que diversos métodos para resolver ecuaciones diferenciales lineales y no lineales [5, 6], así como al integrar ecuaciones diferenciales [7] tienen ventaja considerable sobre el método de diferencias finitas. Una alternativa para la aproximación de estos problemas está dada en la referencia [8] y recientemente en la referencia [9], en la cual en el método antiguo es extendido, una expansión de Chebyshev puede ser aplicada para resolver ecuaciones integrales no lineales complicadas encontradas en mecánica cuántica, teoría de campo y dinámica de fluidos.
2.1.1. Polinomios de Chebyshev del Primer Tipo
Tn
x cos
n (2.1)donde cos0, x.
Ahora bien, tomando xcos, se deduce:
Tn
cos
cos
n (2.2)Y de aquí sin mayor dificultades se obtienen los polinomios:
T0
x 1T1
x x (2.3)Por otra parte de la identidad trigonométrica:
cos
n1
cos
n1
2coscosn (2.4)Se obtiene un método recursivo para poder encontrar las diferentes formas trigonométricas.
Tn
x 1 if n0
x if n1
2xTn1
x Tn2
x if n1
(2.5)
T0
x 1T1
x x T2
x 2x21 T3
x 4x33x(2.6)
Estos polinomios son conocidos formalmente como Polinomios de Chebyshev del Primer Tipo. La Figura 2.1a muestra la gráfica de los primeros 4 polinomios, y la Figura 2.1b los cuatro siguientes.
(a) (b)
Figura 2.1. Gráfica de los 8 primeros polinomios de Chebyshev de Primer Tipo
2.1.2. Propiedades de los polinomios de Chebyshev del Primer Tipo
Seguidamente se enuncian algunas características importantes de los polinomios de Chebyshev:
1. Cuando n es par, el polinomio Tn es una función par. 2. Cuando n es impar, el polinomio Tn es una función impar.
3. El coeficiente mayor del polinomio Tn cuando, n1 es igual a 2n1.
icos
2i1
2n , i0,1,2,K n1 (2.7)
5. máxx 1,1 Tn
x 1;Tn
xi
1i
, donde xicosi
n , i0,1,2,K n
(2.8)
A los puntos xi donde Tn
x alcanza los valores extremos 1 se les denomina puntos de Gauss-Lobatto.6. No existe polinomio Pn
x n-ésimo grado con coeficiente mayor o igual a la unidad, que se verifique:máx 1,1 Pn
x máx 1,1 Tn
x 21n(2.9)
7. Las derivadas de Tn se pueden obtener mediante la siguiente relación de recurrencia:
T n d
d
cosn
d dxnsen n
sen (2.10)
y de aquí se deduce:
T n1 n1
T n1
n12Tn (2.11)
Tn,Tl
w TnTlwdx1 1
(2.12)con función de peso:
w
1x2
12 (2.13)entonces los polinomios son ortogonales.
En particular:
Tn,Tl
w2nlcn (2.14)
donde nl es la delta de Kronecker y cn es:
cn 2 si n0
1 si n1
(2.15)
2.1.3. Existencia de los polinomios de Chebyshev para valores de x 1
El rango de existencia de los polinomios de Chebyshev definidos según (2.1) es:
1x1
x 1
Sin embargo, una simple inspección de los polinomios Tn
x muestra que los mismos tiene sentido para cualquier valor no infinito de x. Cabe entonces hacerse la pregunta: ¿Habrá alguna expresión similar a cos
narccos
x
, que permita extender la validez de las funciones de Chebyshev para cualquier valor de x cuyo módulo sea mayor que 1?.La respuesta es afirmativa. En efecto, la función:
n
x cosh
narccosh x
(2.16)tiene, para x 1 y x1, igual significado que cos
narccos
x
para 1x1, como veremos a continuación.Se comienza por probar la validez de la expresión siguiente, de cual se obtiene el valor de coseno hiperbólico de una suma de dos números:
cosh
coshcoshsenh senhEfectivamente:
cosh coshsenh senhe e
2
e e
2
ee
2
e e
2
e e e ee e e e
4
e e
2 cosh
(2.17)
A continuación se dice que:
Sustituyendo (2.18) en (2.16) y queda:
n
x cosh
narccosh x
coshnvSi n0 cosh1
Se puede observar también que si n1, entonces:
1
x coshvxAhora a partir de la fórmula (2.17), reemplazando y por nv y v, respectivamente, podemos obtener:
n1
x cosh
n1
v
cosh
nvv
coshnvcoshvsenhnv senhvDe modo enteramente similar se demuestra la fórmula siguiente, simétrica de la anterior:
n1
x cosh
n1
v
cosh
nvv
coshnvcoshvsenhnv senhvEl resultado de la suma miembro a miembro las dos últimas igualdades son:
n1
x n1
x 2coshvcoshnv2xn
xDespejando n1
x , resulta:n1
x 2xn
x n1
xDe aquí se llega a la fórmula de recurrencia siguiente, que, como en el caso anterior, nos permitirá obtener todos los coeficientes a partir del conocimiento de dos consecutivos:
Para terminar, debemos decir que, como no existe el arco coseno hiperbólico de ningún número comprendido entre -1 y 1, tampoco existe la función n
x en dicho rango.Como conclusión, las funciones Tn
x y n
x son, cada una de ellas, prolongación analítica de la otra. La Figura 2.2 muestra los respectivos dominios de definición.Figura 2.2. Gráfica de los respectivos dominios de definición.
2.2. Polinomios de Chebyshev del Segundo Tipo
Los polinomios de Chebyshev del segundo tipo Un
x , son polinomios de grado n en x, definido por:Un
x sin
n1
sin ; para xcos (2.19)
El rango de x y son los mismo que en Tn
x . La fórmula elemental es:
sin1 sin, sin 2 2sincos, sin 3sin
4 cos21
,debido a esto podemos ver que la relación de la función seno (2.19) es ciertamente un polinomio en cos y podemos deducir inmediatamente que:
U0
x 1U1
x 2x U2
x 4x21U3
x 8x34x(2.21)
Combinando las identidades trigonométricas, se obtiene:
sin
n1
sin
n1
2cossinnUtilizando la definición (2.6), encontramos que Un
x satisface la relación de recurrencia:Un
x 2xUn1
x Un2
x , n2,3,4,K , (2.22a)de igual forma cumple con las condiciones iniciales:
U0
x 1U1
x 2x (2.22b)con lo cual produce una forma eficiente de generar lo polinomios.
Una identidad trigonométrica similar:
sin
n1
sin
n1
2cossinnUn
x Un1
x 2Tn
x , n2,3,4,K , (2.23)entre los polinomios de primer y segundo tipo.
Se deduce fácilmente de (2.22) que Un
x es idéntica a la forma recurrente de (2.5) paraTn
x . La diferencia son las condiciones iniciales [(2.22b) y (2.3)] las cuales son diferentes para cada sistema de polinomios.En la Figura 2.3 se muestra el comportamiento de los polinomios de segundo tipo Un
x . Estos polinomios oscilan de forma similar a los polinomios de primer tipo ilustrados en la Figura 2.1, pero en este caso existen magnitudes diferentes en los extremos, las cuales incrementan monótonamente desde el centro hasta el fin de su rango.Figura 2.3. Gráfica de los primeros 8 polinomios de Chebyshev de Segundo Tipo
De (2.21) es claro que el polinomio Un(x) del segundo tipo, al igual que el de primer tipo, es una función par o impar, existiendo potencias pares o impares de x dependiendo de que n sea par o impar.
2.3. Polinomios de Chebyshev de Tercer y Cuarto Tipo.
Otras dos familias de polinomios Vn y Wn pueden ser construida, las cuales están relacionadas con Tn y Un, pero tienen definiciones trigonométricas las cuales involucran el
como “Polinomios de Airfoil”, pero Gautschi (1992) les dio un nombre bastante apropiado, “Polinomios de Chebyshev de Tercer y Cuarto tipo”. Primero definimos estos polinomios en forma trigonométrica, mediante un par de relaciones paralelas a (2.1) y (2.19) de Tn y Un. Nuevamente, el rango de x y son los mismos que en Tn.
Los polinomios de Chebyshev Vn
x y Wn
x del tercer y cuarto tipo son polinomios de grado n definidos en x de acuerdo a la relación:Vn
x cos n1
2
cos1 2
(2.24)
y
Wn
x sin n1
2
sin1 2
(2.25)
para xcos.
Se observa que cos n1
2
es un polinomio impar de orden 2n1 en cos1
2. El lado derecho de (2.24) es un polinomio par de grado 2n en cos1
2, el cual es equivalente a un polinomio de grado n en cos21
2 1
V0
x 1V1
x 2x1V2
x 4x22x1V3
x 8x34x24x1(2.26)
Así mismo sin n1
2
es un polinomio impar de grado 2n1 en sin1
2. De igual forma el lado derecho de (2.25) es un polinomio par de orden 2n en sin1
2, el cual es equivalente a un polinomio de grado n en sin21
2 1
2
1cos
y nuevamente es un polinomio de grado n en cos. Por ejemplo:W0
x 1W1
x 2x1W2
x 4x22x1W3
x 8x34x24x1(2.27)
Los polinomios Vn
x y Wn
x , son re-escalas de dos polinomios Jacobi particularesPn,
x con 12, 1
2 y viceversa, explícitamente:
2n n
Vn
x 22nP n 1 2, 1 2 x
; 2nn
Wn
x 22nP n1 2,
1 2 x
Estos polinomios pueden ser generados eficientemente mediante el uso de una relación de recurrencia.
Wn
x 2xWn1
x Wn2
x , n2,3,4,K , (2.28b)con
V0
x 1V1
x 2x1 (2.28c)y
W0
x 1W1
x 2x1 (2.28d)Así que Vn
x y Wn
x comparten precisamente la misma relación de recurrencia queTn
x y Un
x , y generan diferentes polinomios debido a las condiciones iniciales para n1.Es claro que de (2.28) Vn
x y Wn
x son polinomios de grado n en x, en el cual se presentan todas las potencias de x y que su coeficiente más alto para xn es 2n.(a) (b)
En la Figura 2.4 se muestran las graficas de Vn
x y Wn
x , las cuales son imágenes espejo una con respecto a la otra.2.4. Filtros Digitales
Un filtro digital es aquel que se emplea en procesamiento de señales para eliminar partes no deseadas de éstas, tales como ruido o sólo para permitir el paso de un cierto rango de frecuencias. Un filtro digital emplea un procesador digital que efectúa operaciones matemáticas en valores muestreados de la señal. El procesador puede ser de propósito general, tal como cualquier computadora personal, un chip DSP (Procesador Digital de Señales) especializado o una FPGA programable.
La señal de entrada analógica debe ser muestreada y digitalizada usando un ADC (conversor analógico-digital). El resultado son números binarios que representan los valores sucesivos muestreados. Estos son transferidos al procesador, el cual efectúa operaciones matemáticas en ellos. Las operaciones pueden ser desde filtros de promediado de la muestra actual con alguna de las anteriores hasta multiplicaciones por constantes de los valores de entrada o de instantes anteriores almacenados en memoria, para posteriormente sumar estos resultados de la multiplicación y dar una salida.
Existen dos tipos diferentes de filtros, filtros no recursivos y filtros recursivos. Los filtros no recursivos son aquellos en cuya salida sólo depende de los valores de entrada, mientras que los recursivos dependen tanto de los valores de entrada como de los valores previos de la salida, los cuales son almacenados en memoria. Esto se refiere al hecho de que valores de salida previamente calculados vuelven para calcular los nuevos valores de salida.
Los filtros no recursivos también son conocidos como filtros FIR (Respuesta Finita al Impulso) y los recursivos como filtros IIR (Respuesta Infinita al Impulso). Estos términos se refieren al comportamiento de dicho filtro cuando se le aplica en la entrada una función impulso, también conocida como Delta de Kronecker.
2.4.1. Ventajas de los Filtros Digitales
Un filtro digital es programable, es decir, su funcionamiento está determinado por un programa almacenado en la memoria contigua al procesador. Esto significa que puede ser variado fácilmente sin afectar al hardware, mientras que la única manera de variar un filtro analógico es alterando el circuito.
Los filtros digitales pueden ser fácilmente diseñados, probados e implementados en una computadora. Los analógicos pueden ser simulados, pero siempre hay que implementarlos a través de componentes discretos para ver su funcionamiento real.
Las características de los filtros analógicos, particularmente los que contienen componentes activos, están sujetos a alteraciones y dependen de la temperatura. Los filtros digitales no sufren estos problemas y son extremadamente estables ante factores externos.
Los filtros digitales son mucho más versátiles a la hora de manipular la señal, que pueden llegar a variarla y tratarla radicalmente cambiando sus características.
Los procesadores DSP más rápidos pueden manejar combinaciones complejas de filtros en paralelo o en serie (en casada), haciendo los requerimientos de hardware relativamente simples y compactos en comparación con la circuitería analógica equivalente.
2.4.2. Filtros IIR
IIR es un sigla en ingles para Infinite Impulse Response ó Respuesta Infinita al Impulso, estos son filtros digitales a los cuales si se les aplica en la entrada una señal impulso, la salida tendrá un numero infinito de términos no nulos. La implementación de este tipo de filtros es mucho más flexible y elimina la degradación. Algunas de las áreas de aplicación para este tipo de filtros son: mejoramiento de audio (música), telecomunicaciones, procesamiento de imagen/video, instrumentación biomédica y procesamiento de imágenes radar y de sonar.
La salida de este tipo de filtros depende de las entradas actuales y pasadas, además de las salidas en instantes anteriores, también son llamados filtros digitales recursivos. Su expresión en el dominio discreto esta dada por:
y n
bix n
i
ajy n
j
j1
Q
i0
P
(2.29)Figura 2.6. Estructura de un Filtro IIR.
En esta estructura se puede observar como la salida y n
es introducida de nuevo en el sistema.2.4.3. Filtros FIR
y n bkx n k
k0
N1
(2.30)El orden del filtro está dado por N, es decir, el número de coeficientes. También la salida puede ser expresada como la convolución de una señal de entrada x n con un filtro h n .
y n hkxnk
k0
N1
(2.31)En la Figura 2.7 se muestra la estructura básica de un filtro FIR.
Figura 2.7. Estructura de un Filtro FIR.
Se puede ver que es la misma entrada retardada cada vez más en el tiempo, multiplicada por diversos coeficientes y finalmente sumada al final. Hay muchas variaciones de esta estructura. Si tenemos una respuesta de frecuencia como objetivo, conseguiremos que la respuesta del filtro se asemeje más a ella cuanto más largo sea el número de coeficientes tenga.
Los filtros FIR tienen la ventaja que pueden diseñarse para ser de fase lineal, es decir, no introducen desfases en la señal, a diferencia de los IIR o los filtros analógicos. Por ese motivo tienen interés en audio.
2.4.4. Ventajas y desventajas de los filtros IIR y FIR
Los filtros FIR tienen una respuesta de fase lineal (no se introduce distorsión por fase en la señal), los filtros IIR tienen respuesta no lineal.
Los filtros FIR que son realizados sin recursividad son siempre estables porque no tienen polos. En los IIR esto no siempre se puede garantizar. Cuando se diseñan filtros IIR con polos cerca del círculo unitario se debe hacer con cuidado porque no es raro que al implementar el filtro, resulte que el polo caiga fuera del círculo haciéndolo inestable.
Los efectos de la longitud de palabra finita son menos en los filtros FIR que en los filtros FIR.
Los filtros IIR requieren menos coeficientes, menos cálculos y son más eficientes, Los FIR requieren más procesamiento y memoria.
Los filtros analógicos pueden ser transformados en su equivalente IIR, los FIR no tienen equivalente analógico.
los filtros FIR son más difíciles de sintetizar, en los IIR se logra más fácil la respuesta arbitraria en frecuencia.
2.5. Transformada Wavelet
La Transformada Wavelet Discreta (DWT) es empleada en un gran variedad de aplicaciones en el procesamiento de señales, tales como, esteganografía [10, 11, 12], marcas de agua [13, 14], compresión de video [15], compresión para comunicaciones por Internet [16], reconocimiento de objetos [17], reconocimiento facial [18] y análisis numérico [19]. Esta transformada puede representar eficientemente algunas señales, sobre todo aquellas que tienen cambios localizados. Considerando como ejemplo la representación de la función de impulso unitario mediante la transformada de Fourier, con esta se necesita la suma un número infinito de términos ya que se esta tratando de representar un cambio rápido mediante la suma de sinusoidales. Sin embargo, con la transformada Wavelet se puede representar esta misma función con solo unas pocas muestras.
mismo trabajo, pero utilizando diferente terminología. A finales de 1980 Stéphane Mallat unificó este trabajo en uno solo [20].
Esta transformada es discreta en tiempo y escala. En otras palabras los coeficientes de la DWT pueden ser valores de punto flotante, valores reales, pero los valores de tiempo y escala utilizados para representar estos coeficientes son enteros. Esta transformada Wavelet esta ganando popularidad con el reciente estándar JPEG-2000, el cual incorpora análisis de multi-resolución.
Se puede descomponer una señal en diferentes niveles de resolución mediante la implementación de pares de filtros FIR. Uno de estos filtros de análisis (Transformada Wavelet) es un filtro pasa-bajas (LPF), mientras que el otro es un filtro pasa-altas (HPF), ver Figura 2.8. Cada uno de los filtros de análisis tiene una etapa de diezmado en su salida. La Figura 2.9 muestra el proceso de síntesis (Transformada Wavelet Inversa), esta etapa consiste de un filtro pasa-bajas inverso (ILPF) y un filtro pasa-altas inverso (IHPF), ambos después de una etapa de interpolación. El filtro pasa-bajas produce una señal promedio, mientras que el filtro pasa-altas produce una señal que contiene los detalles de la original.
Mientras que la señal promedio se parece mucho a la original, necesitamos los detalles para hacer que la señal reconstruida sea idéntica a la original. El análisis de multi-resolución consiste en colocar la señal promedio dentro de otros filtros, los cuales producen la señal promedio y la de detalles de la siguiente análisis. Cada salida de la análisis sólo tiene la mitad de muestras que la señal original más unos términos debido al proceso de filtrado.
Figura 2.8. Filtro de Análisis. Figura 2.9. Filtro de Síntesis.
horizontal/vertical de los filtros pasa-bajas/pasa-altas. Esto significa que la transformada en 2D es simplemente una aplicación de la DWT en 1D en dirección vertical y horizontal [21].
2.5.1. Banco de Filtros de dos canales.
Para ilustrar una transformación general utilizaremos la Figura 2.10. En ésta una señal es introducida en dos canales, cada uno de ellos con un par de filtros FIR. Esta estructura es denominada Banco de Filtros de Dos Canales.
Figura 2.10. Banco de Filtros de Dos Canales.
El lado izquierdo de la Figura 2.10 ilustra la transformada Wavelet o también llamada análisis y el lado derecho corresponde a la transformada Wavelet Inversa o también llamada síntesis. Cuando hablamos acerca de una transformada como la transformada Haar o una transformada Wavelet, solo nos referimos a la parte de análisis. Del mismo modo, la transformada inversa Haar se refiere a la parte de síntesis. Colocando ambas partes, se espera que la salida y n
sea exactamente la misma que la entrada x n
con un posible retardo, ya quey n
x n
k
, donde k es el número de coeficientes de los filtros utilizados. Los filtros complementarios de un banco de filtros divide la señal en sub-señales con componentes de baja y alta frecuencia, a este proceso se le llama codificación sub-banda.Para la transformada inversa cada una de las salidas de los filtros (w n
y z n
) entra en otros filtros FIR, después los dos canales son combinados mediante la suma de los mismos para así obtener y n
. Se espera que y n
sea la misma que x n
, asumiendo que no alteramos la señal a lo largo del camino. Si queremos desempeñar compresión con pérdidas, podemos alterarexacta de x n
, sin importar los retrasos que esta tenga, debemos elegir los coeficientes adecuadamente. Asumamos que:h0
a, b
h1
b, a
g0
b, a
g1
a, b
Tomando en cuenta estos coeficientes, veamos como quedaría w n
y z n
después del proceso de análisis:w n
ax n
bx n
1
z n
bx n
ax n
1
Para poder realizar el análisis adecuadamente debemos saber como son w n
1
yz n
1
, las cuales pueden ser obtenidas sustituyendo n por n1:w n
1
ax n
1
bx n
2
z n
1
bx n
1
ax n
2
Teniendo este resultado procedemos a realizar el procesos de síntesis:
y n
bw n
aw n
1
az n
bz n
1
Desarrollando la ecuación, queda:
y n
b ax n
bx n
1
a ax n
1
bx n
2
a bx n
ax n
1
b bx n
1
ax n
2
y n
abx n
bbx n
1
aax n
1
abx n
2
abx n
aax n
1
bbx n
1
abx n
2
y n
bbx n
1
aax n
1
aax n
1
bbx n
1
y n
2aa2bb
x n
1
(2.32)La transformada Haar es una de las Wavelets más sencillas que existen. Si elegimos cuidadosamente los coeficientes a y b mostrados que en (2.32) obtendremos la transformada Haar. Si 2aa2bb1 entonces y n
x n
1
, lo cual significa que la salida es la misma que la entrada, solamente que se encuentra retardada por 1. Si forzamos aa12 y bb12, entonces ab 1
2, entonces estos valores corresponden a la transformada Haar. La razón por la cual queremos que aabb1 y no 2
aabb
1 tiene que ver con el diezmado y la interpolación.2.5.2. Filtros de Cuadratura-Espejo y Filtros de Cuadratura Conjugados
Algunas veces los bancos de filtros de dos canales son referidos como codificadores sub-banda. Podemos observar que un banco de filtros de dos canales también pueden ser nombrados como “Filtros de Cuadratura-Espejo” (QMF) o “Filtros de Cuadratura Conjugados” (CQF), sin embargo “Banco de Filtros de Dos Canales” es el nombre más común de estos tres. Ambos tipos de filtros, QMF y CQF, ponen condiciones a los coeficientes de los filtros para cancelar el alias y obtener una reconstrucción perfecta. En otras palabras estos filtros son bancos de filtros de dos canales con la misma estructura. La única diferencia entre los QMF y los CQF o cualquier otro banco de filtros de dos canales son los coeficientes de los filtros.
Hemos especificado los coeficientes en términos de uno de los filtros de análisis y los hemos denominado como h0, pero no sabíamos nada acerca de los demás valores. Los demás coeficientes de los filtros
h1,g0,g1
son obtenidos típicamente de h0 [22]. Después de todo no podemos utilizar cualquier valor para los filtros o el resultado final no coincidirá con la señal original.Figura 2.11. Filtro Cuadratura-Espejo para la Transformada Haar.
Para los filtros de cuadratura conjugados los coeficientes h1 es de orden inverso con respecto a h0, con cualquier otro valor negativo [23]. Si h0
a,b,c,d
, entonces h1 serád,c,b,a
. Para el proceso de síntesis, g0 y g1 son de orden inverso con respecto a h0 y h1respectivamente. Utilizando los valores anteriores de h0, obtenemos a g0
d,c,b,a
yg1
a,b,c,d
. La Figura 2.12 muestra como quedaría para dos coeficientes.Figura 2.12. Filtro de Cuadratura Conjugado para la Transformada Haar.
Para dos coeficientes que son iguales (a=b) el QMF y CQF tienen los mismos coeficientes de los filtros. Cabe notar que las Figuras 2.11 y 2.12 muestran la transformada Haar cuando a=b .
2.5.3. Diezmado/Interpolación
En la operación de diezmado sólo se toman en cuenta los valores pares, con esto la señal original es reducida a la mitad de su tamaño. La operación inversa, interpolación, regresa la señal a su tamaño original, usualmente colocando ceros entre muestra y muestra.
(a) (b)
Figura 2.13. (a) Diagrama básico del diezmado. (b) Diagrama básico del interpolado.
La Figura 2.13(a) muestra el diagrama básico del diezmado, el cual se representa por:
u0
n v0
2n
(2.33)La Figura 2.13(b) muestra el diagrama básico del interpolado, el cual se representa por:
v 0
n u0
n u0
n v 0 n
2
si n número par
0 si n número impar
(2.34)
2.5.3.1. Ejemplos utilizando Diezmado/Interpolación
Podría parecer que al utilizar diezmado/interpolación el proceso de filtrado no funcionara, ¿seria posible “tirar” la mitad de los cálculos después del filtro, y no perder información?. La Figura 2.12 ilustra un ejemplo de un banco de filtros de dos canales con diezmado/interpolación.
Figura 2.14. Un banco de filtros simple para demostración de diezmado/interpolación.
Tomando en cuenta los coeficientes de los filtros de la Figura 2.14, modificamos el diagrama y queda de la siguiente forma:
Figura 2.15. Diagrama reducido de un banco de filtros simple para demostración de diezmado/interpolación.
Ahora procedemos a realizar una prueba, utilizaremos
Figura 2.16. Ejemplo del comportamiento de un banco de filtros simple.
De acuerdo a la Figura 2.16, observamos que los valores de salida después del primer filtro son afectados por el diezmado, quedando solamente las muestra pares
x
0, x
2, x
4 , etc., que es donde termina el proceso de análisis. Una vez teniendo esta salida, se le aplica la interpolación, la cual coloca ceros entre las muestras, quedandox
0, 0, x
2, 0, x
4, 0, etc.Observando la parte inferior de la Figura 2.16, la salida contiene un cero seguido de los valores de la entrada, esto es debido a la presencia de un retardo. Cuando esta señal pasa a través del diezmado, el cero es el primer valor que se toma y debido a esto se toman los valores impares de la señal de entrada, quedando 0, x
1, 0, x
3, 0, x
5 , etc. La combinación de estas dos sub-señales nos da como resultado la señal original.Este tipo de demostración, junto con algunas otras muestra que el desempeño del diezmado/interpolación en filtros QMF descompone una señal de entrada en dos sub-bandas las cuales posteriormente son sumadas para así obtener la señal original.
2.6. Transformada Wavelet Discreta
Figura 2.17. Estructura de un filtro de cuadratura-espejo de dos-canales.
La cantidad de detalles de la señal es modificada por la acción de los filtros y la escala se modifica por la operación de diezmado. A este proceso de filtrado y diezmado sucesivo se le conoce como codificación sub-banda [27]. Dicha operación se expresa de la siguiente forma:
u0
n x k
h0
2nk
k
(2.35)u1
n x k
g0
2nk
k
(2.36)donde u0
n y u1
n son las salidas de los filtros pasa-bajas y pasa-altas respectivamente,h0
2nk
representa la respuesta al impulso del filtro pasa-bajas y g0
2nk
representa la respuesta al impulso del filtro pasa-altas sub-muestreados por un factor de 2.2.7. Transformada Wavelet Haar
Para entender el mecanismo de las Wavelets se puede definir la Wavelet Haar para una sola dimensión. Debido a que es una de las señales más fáciles de aplicar, también es una de las más utilizadas debido a su sencillez.
h0
n 1
2; 0n1 1
2; 1n2 0; en otro caso
En el caso del filtro pasa-altas, seria:
g0
n 1
2; 0n1
1
2; 1n2 0; en otro caso
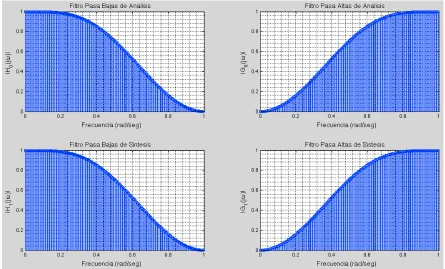
Cuya respuesta en frecuencia esta dada por (2.37) y muestra en la Figura 2.18.
H0
j h0
n ejn n1N
G0
j g0
n ejn n1N
Figura 2.18. Respuesta en frecuencia de los filtros de la Wavelet Haar.
La señal a utilizar es una función con valores extraídos en instantes discretos de tiempo, estas son denominadas señales discretas, las cuales son definidas de la siguiente forma:
x n
x1,x2,x3,K xn
La transformada Wavelet Haar descompone esta señal discreta en dos sub-señales de la mitad de longitud de la original. Una de estas sub-señales es conocida como valor promedio ó señal aproximada y la otra sub-señal es conocida como detalles [28].