e
INSTITUTO POLITÉCNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica
Unidad ZACATENCO
Instrumentación de
un Encaje Protésico
para Miembro Inferior
PROYECTO TERMINAL
Q
UE PARAO
BTENER ELT
ÍTULO DEDIRIGIDA POR:
Dr. en C. Christopher René Torres San Miguel P R E S E N T A:
Yair Leonardo Zúñiga Arteaga
México, D.F. Septiembre del 2012
INGENIERO EN
A
gradezco y les dedico
:
De manera muy especial al Instituto Politécnico Nacional, a la prestigiada
Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Profesional Zacatenco, a su Sección de Estudios de Posgrado e Investigación, a la carrera de Ingeniería en Control y Automatización y a todas las grandes instituciones que han colaborado con mi formación profesional.
A él increíble Doctor Neurocirujano Max, a quien junto a mis padres y hermanos debo mi vida.
A él Doctor en Ciencias Christopher René Torres San Miguel a quien debo el fino gusto por la investigación institucional y profesional.
A él Ingeniero Leonardo Zúñiga por haber inculcado en mí el firme amor por la ingeniería.
A la profesora Judith Norma Arteaga por una vida de lucha y firme ejemplo.
A los Ingenieros Gerardo de Jesús Zúñiga y Naycir Zúñiga a quienes debo toda una vida de camaradería y fraternidad que me abre camino en el mundo.
A los camaradas con quienes he convivido una vida llena de retos y superaciones, en mi mente y mi corazón amigos míos los llevo con cariño.
Con profunda admiración a todos ustedes tributo mi humilde amistad y más
Índice General
Índice General
Índice. i
Índice de Figuras. iii
Índice de Tablas. vi
Resumen. vii
Abstract. viii
Objetivo General. ix
Objetivo Específico. ix
Justificación. x
Capítulo I. Estado del Arte.
I.1 Generalidades. 2
I.2 Cronología del desarrollo de los encajes protésicos para miembro inferior. 3
I.3 Planteamiento del problema. 21
I.4 Objetivos del proyecto y organización de la tesis. 22
I.5 Sumario. 23
Capítulo II. Etiología de la amputación.
II.1 Generalidades. 26
II.2 Anatomía del miembro inferior (pierna humana). 27
II.3 Causas de la amputación. 35
II.4 Tipos de amputaciones. 36
II.5 Criterios de la decisión de amputación. 38
II.5.1 Índice del sindrome de la extremidad lesionada (ISEL). 39
II.5.2 Índice predictivo de salvación (IPS). 41
II.5.3 Puntuación de severidad de la extremidad lesionada (PSEL). 42 II.5.4 Índice de salvación de la extremidad (ISE). 43 II.5.5 Puntuación de la lesión nerviosa, isquemia, lesión/contaminacion de partes blandas, osea,
shock, y edad (NIPBOSE). 44
II.6 Niveles de amputación. 46
II.6.1 Niveles de amputación de miembros inferiores. 50
II.7 Sistemas componentes del movimiento humano. 53
II.7.1 Biomecánica del cuerpo humano. 54
II.7.2 Centro de gravedadd del cuerpo humano. 56
II.8 Marcha humana. 56
II.8.1 Biomecánica de la marcha humana. 57
II.8.2 Biomecánica de la marcha humana con amputación. 60
Índice General Capítulo III. Reconstrucción digital.
III.1 Generalidades. 66
III.2 Caracterización personalizada del muñon. 67
III.2.1 Acondicionamiento del equipo y programa de cómputo para el escaneo. 67
III.3 Reconstrucción digital del muñon residual. 69
III.3.1 Modulo de reconocimiento. 70
III.3.2 Modulo de exploración. 71
III.3.3 Modulo poligono. 72
III.3.4 Modulo superficie. 74
III.3.5 Modulo de caracterizacion. 74
III.3.6 Modulo de niveles y factores. 75
III.3.7 Reconstruccion de imagen digital en 3D. 75
III.4 Resultados. 78
III.5 Sumario. 87
Capítulo IV. Instrumentación.
IV.1 Generalidades. 89
IV.2 Potenciales electrobiológicos. 89
IV.3 Instrumentación. 90
IV.4 Tipos de instrumentos y componentes de un lazo de contro. 91 IV.4.1 Especificaciones generales de los instrumentos de medición. 94 IV.4.2 Características de los componentes de sistema embebido de dquisicion de temperatura. 96
IV.4.3 Sensor de temperatura TMP102. 97
IV.4.4 Microcontrolador Arduino One. 98
IV.4.5 Placa reguladora de voltaje. 99
IV.4.6 Módulo Xbee. 100
IV.4.7 Placa de interfaz Explorer XBEE USB. 103
IV.5 Metodología y configuración. 104
IV.5.1 Conexiones y configuración del tmp 102. 104
IV.5.2 Conexión y configuración de la Interfaz USB. 114 IV.5.3 Conexiones y configuración de la placa Arduino One-Atmel 328®. 114
IV.5.4 Medición de temperatura. 118
IV.6 Instrumentación del encaje protésico de miembro inferior. 121
IV.7 Sumario. 126
Capítulo IV. Instrumentacion.
V.1 Resultados obtenidos. 128
V.2 Conclusiones. 134
Índice de Tablas
Índice de figuras.
Capítulo I
Figura I.1 Meromelia. 2
Figura I.2 Radiografía de una amputación transfemoral. 3
Figura I.3 Geometría de Iván Long. 4
Figura I.4 a) Anteroposterior (AP), b) Medio lateral (ML), c) Circunferencial (Circ),
d) Longitud (LEN). 5
Figura I.5 a) Preparativo anterior a la toma de datos. b) Toma de datos. 6 Figura I.6 Digitalizadora midiendo la cara interior de un molde de yeso. 6
Figura I.7 Modificar y esculpir. 7
Figura I.8 Encaje de Prueba. 8
Figura I.9 Encaje diseñado a base del sistema CASD modificado a menester del usuario. 9 Figura I.10 IPOS ™Interfaz del sistema CAD para diseño asistido por computadora CAD. 9 Figura I.11 Sistema CAD para diseño asistido por computadora CAD. 10 Figura I.12 Ajustes en los volúmenes del encaje protésico. 10 Figura I.13 Articulación de la rodilla y sistemas de alineación. 11 Figura I.14 Copa de contención y su alineación con el encaje protésico. 12 Figura I.15 Plantilla de alineación ICRC©- P & O.a) Movimiento longitudinal,
b) movimiento lateral c) Movimiento de rotación angular. 13
Figura I.16 Descripción general de las características genéricas de un dispositivo de protección. 15 Figura I.17 Medida de ortopedia residual de contención anatómica con SIT-Cast. 16
Figura I.18 Osteointegración transfemoral. 17
Figura I.19 Usuario transfemoral beneficiado por la técnica de osteointegración. 18
Capítulo II
Figura II.1 Estructura de la pierna humana. 27
Figura II.2 Sistema óseo, componente de la pierna humana. 28
Figura II.3 Fémur humano. 29
Figura II.4 Rótula humana. 29
Figura II.5 Tibia y Peroné. 30
Figura II.6 Grupo muscular superior. a) Aductor mayor, b) Tensor de faja alta, c) Bíceps femoral, d) Semitendinoso, e) Semimembranoso, f) Vaso lateral, g) Vaso medio, h) Recto femoral, i) Vaso intermedio.
31
Figura II.7 Grupo muscular inferior, a) Tibia anterior, b) Extensor largo de los dedos, c) Extensor largo del dedo gordo, d) Peronéo tercero, e) Peronéo largo, f) Peronéo corto, g) Gastrocnemio, h) Soleo, i) Plantar.
32
Figura II.8 Corte sagital de la rodilla. 34
Figura II.9 Articulación de la rodilla humana a) Vista anterior y b) Vista posterior. 34 Figura II.10 Distribución de amputaciones debido a su etiología. 35 Figura II.11 Amputaciones Traumáticas. a) Miembros Superiores. y b) Miembros Inferiores. 37
Figura II.12 Niveles de amputación. 47
Figura II.13 Distribución frecuencial según los niveles de amputación. 49
Figura II.14 Amputación por debajo de la rodilla. 50
Figura II.15 Amputación transfemoral. 51
Figura II.16 Hemipelvectomia. 52
Figura II.17 Symes. Amputación a nivel del tobillo. 52
Figura II.18 Human Motions - Peter Jansen (1956). 54
Figura II.19 Sistema de palancas corporales. 55
Figura II.20 Centro de gravedad Humano. 56
Figura II.21 Apoyos sucesivos de los pies en el suelo en el ciclo de marcha. 58 Figura II.22 Ciclo de la marcha dividida en 8 eventos. 59
Índice de Tablas Capítulo III
Figura. III.1 ZScan 3D® compatible con Windows 7 versión de 64 Bits®. 67 Figura. III.2 Ícono del programa ZScan 3D® en ambiente Windows 7. 68 Figura. III.3 Conexión física del escáner 3D Zscanner700® a una PC, HDMI-USB. 68 Figura. III.4 Ambiente grafico del software ZScan 3D de 64 Bits®. 69 Figura. III.5 Toma de imagen del muñón residual transfemoral 70 Figura. III.6 Nube de puntos original importada al ZScan 3D de 64 Bits®. 76 Figura. III.7 Nube de puntos con un filtrado de redundancia de tres veces. 76 Figura. III.8 Primer suavizado de los puntos una vez aplicado el filtro redundante y construcción de
la malla. 77
Figura. III.9 Segundo suavizado de los puntos una vez aplicado el filtro redundante y construcción
de la malla. 77
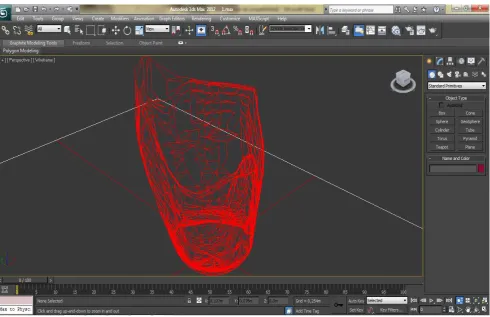
Figura. III.10 Limpieza de las caras defectuosas en la malla a través del modulo polígono. 78 Figura. III.11 Enmallado digital realizado con la herramienta “TERRAIN” del programa de diseño
Autodesk 3D Max Studio 2012 Windows 7 64 Bits® a partir de la toma digital del voluntario transfemoral.
79
Figura. III.12 Ambiente grafico de desarrollo/Autodesk 3D Max Studio 2012 Windows 7 64 bits, figura importada.
79
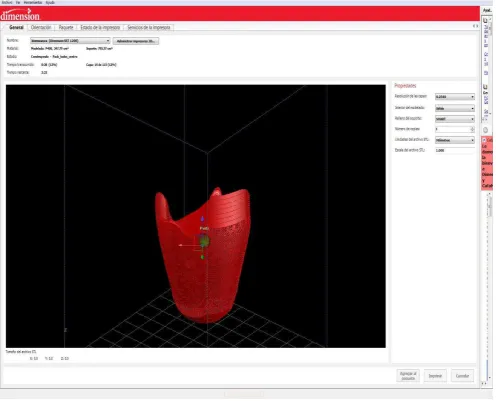
Figura. III.13 Vista lateral Izquierda/Autodesk 3D Max Studio 2012 Windows 7 64 bits. 80 Figura. III.14 Vista lateral derecha/ Autodesk 3D Max Studio 2012 Windows 7 64 bits. 80 Figura. III.15 Vista lateral derecha superior/Autodesk 3D Max Studio 2012 Windows 7 64 bits. 81 Figura. III.16 Ícono de acceso directo al software Catalyst® versión ex 4.1by Stratasys Inc. 81 Figura. III.17 Opening de acceso al software Catalyst® versión ex 4.1by Stratasys Inc. 82 Figura. III.18 Ambiente grafico del software Catalyst® versión ex 4.1by Stratasys Inc. 82 Figura. III.19 Importación y visión de archivos en el software Catalyst® versión ex 4.1by Stratasys Inc. 83 Figura. III.20 Impresión en 3D con la impresora Dimension sst 1200®. 84 Figura. III.21 Encaje protésico personalizado impreso en la impresora 3D dimension sst 1200®. 85 Figura. III.22 Encaje protésico personalizado obtenido impreso en 3D. 86 Figura. III.23 Representación grafica de una AMI a nivel transfemoral izquierdo. 86
Capítulo IV
Figura. IV.1 Sensor tmp 102 de texas instruments®. 91
Figura. IV.2 Microcontrolador Atmel®-Atmega8®. 92
Figura. IV.3 Xbee Transmisor. 92
Figura. IV.4 Xbee Receptor. 93
Figura. IV.5 Diagrama de bloques del sistema embebido de monitoreo de temperatura. 96 Figura. IV.6 Diagrama de bloques interno y características del sensor de temperatura tmp102. 97
Figura. IV.7 Características del Arduino One. 98
Figura. IV.8 Descripción de las características de los pines del Arduino One. 99
Figura. IV.9 Placa reguladora de voltaje. 99
Figura. IV.10 Pila de protocolos ZigBee/ 802.15.4usado por el Xbee. 100
Figura. IV.11 Componentes del módulo Xbee®. 101
Figura. IV.12 Conexiones mínimas requeridas para el Xbee. 102
Figura. IV.13 Funciones y su posición en el Xbee®. 103
Figura. IV.14 Placa Explorer XBEE USB. 103
Figura. IV.15 Conexión del TMP102 y el microcontrolador Atmel-Atmega®. 104
Figura. IV.16 Sensor de temperatura TMP102. 105
Figura. IV.17 Conexión del sensor tmp 102. 105
Índice de Tablas
Figura. IV.27 Conexión del módulo Xbee emisor configurado. 113 Figura. IV.28 Conexión del módulo Xbee emisor configurado. 113
Figura. IV.29 Aplicación de drivers VCP. 114
Figura. IV.30 Ícono de inicio del IDE de Arduino One compatible con Windows 7 de 64 Bits. 114 Figura. IV.31 Opening del programa IDE de Arduino One compatible con Windows 7 de 64 Bits. 115 Figura. IV. 32 Selección del tipo de placa Arduino One para utilizar. 115 Figura. IV.33 Selección del puerto donde se localiza conectada la placa Arduino One. 116
Figura. IV.34 Programa de prueba. 117
Figura. IV.35 Programa de adquisición de temperatura en el encaje protésico. 120 Figura. IV.36 Conexión física de la placa Arduino One con el programa ya cargado. 121 Figura. IV.37 Circuito destinado a su implantación en la periferia del encaje protésico de miembro
inferior.
122
Figura. IV.38 Zona de instrumentación en el encaje protésico. 123 Figura. IV.39 Implantación del sensor TMP 102 en el encaje protésico. 123 Figura. IV.40 Implantación de dispositivos de adquisición y envío de la variable de temperatura. 124 Figura. IV.41 Diagrama de bloques del programa de medición de temperatura. 125
Capítulo V
Figura. V.1 Configuración de la hyperterminal de Windows 7. 128 Figura. V.2 Visualización a través de una pantalla de Hyperterminal de Windows 7. 129
Figura. V.3 Rediseño del encaje transfemoral 130
Figura. V.4 Modificación de la estructura del encaje transfemoral. 130 Figura. V.5 Visualización del rediseño efectuado en la zona medial del encaje transfemoral. 131 Figura. V.6 Impresión del encaje transfemoral rediseñado. 131
Figura. V.7 Encaje protésico impreso con ABS en 3D 132
Figura. V.8 Implementación del encaje rediseñado. 133
Índice de Tablas
Índice de Tablas.
Capítulo I
Tabla. I.1 Características de los voluntarios transfemorales. 20
Capítulo II
Tabla. II.1 Amputaciones Traumáticas de Miembros Superiores según la Clasificación internacional
de patologías “CIE-10” décima versión. 36
Tabla. II.2 Amputaciones Traumáticas de Miembros Inferiores según la Clasificación internacional de
patologías “CIE-10” décima versión. 38
Tabla. II.3 Indicaciones de Lange para la amputación primaria de fracturas de tibia con lesión
vascular. 39
Tabla. II.4 Índice del Síndrome de La Extremidad Lesionada (ISEL). 40
Tabla. II.5 Índice Predictivo de Salvación (IPS). 41
Tabla. II.6 Puntuación de Severidad de la Extremidad Lesionada (PSEL). 42 Tabla. II.7 Índice de Salvación de la Extremidad (ISE). 43
Tabla. II.8 Puntuación NIPBOSE. 45
Tabla. II.9 Clasificación de SCHWARTZ para el nivel de amputación de nivel inferior. 48 Tabla. II.10 Clasificación de OXFORD para el nivel de amputaciones de miembro inferior. 48 Tabla. II.11 Cinemática de las articulaciones de cadera, rodilla y tobillo a lo largo de las fases de la
marcha. 61
Tabla. II.12 Parámetros temporales y de referencia en una marcha protésica transfemoral. 62
Tabla. II.13 Parámetros de distancia. 63
Capítulo III
Tabla. III.1 Opciones y herramientas del modulo de exploración 71 Tabla. III.2 Opciones y herramientas del modulo Polígono. 72 Tabla. III.3 Opciones y herramientas del elemento Polígono. 73 Tabla. III.4 Opciones y herramientas del modulo Superficie. 74 Tabla. III.5 Opciones y herramientas del modulo Caracterización. 74
Capítulo IV
Tabla. IV.1 Tipificación de variables. 90
Tabla. IV.2 Precisión de respuesta del tmp102 de Texas Instruments ® con distintos valores de
operación. 95
Tabla. IV.3 Características del tmp 102. 97
Tabla. IV.4 Características del Arduino One. 98
Resumen
Resumen.
En este trabajo se reporta la instrumentación realizada en un encaje protésico para miembro inferior mediante del sensor electrónico TMP102 con el cual se logró detectar el comportamiento de la temperatura presente en un muñón residual transfemoral, como variable natural del muñón residual inferior de un voluntario con amputación transfemoral, durante una marcha protésica simulada que, con el fin de realizar la caracterización particular, derivó en mejoras sustanciales al diseño del encaje protésico buscando propiedades mecánicas más cercanas a las de dicha condición física.
El prototipo implementado como una plantilla permitió su uso como dispositivo de interpretación y brindó referencias para la generación de un encaje acoplado, a las características fisiopatológicas del voluntario protésico, que cuenta con aspectos de diseño mejorados. Experimentando plena confianza en que los resultados desplegados satisfacen la seguridad y confort requerido esta tesis es en sí un trabajo que se fundamenta en la especialidad de instrumentación profesional para satisfacer el menester humano a través de la integración de instrumentos y elementos electrónicos.
Abstract
Abstract.
In this work reports on an implementation for lower limb prosthetic socket using electronic sensor TMP102 with which successfully detected the temperature behavior present in a transfemoral residual stump, as natural variable lower residual stump of an amputee volunteer transfemoral during a simulated prosthetic running in order to perform the particular characterization, resulted in substantial improvements in the design of prosthetic socket looking mechanical properties closer to those of said physical condition.
The prototype implemented as a template allow its use and interpretation device as references provided for generating a socket coupled to the prosthetic volunteer pathophysiological characteristics, with improved design aspects. Experiencing confident that the results displayed meet required safety and comfort this thesis is itself a work that is based on the expertise of professional instrumentation to satisfy the human need through the integration of instruments and electronics.
Objetivos Generales y Específicos
Objetivos Generales.
Optimizar el diseño de los encajes protésicos de tipo transfemoral de miembro inferior mediante del estudio y caracterización de la temperatura medida en un muñón residual transfemoral que a través de instrumentos integrados en un encaje protésico de miembro inferior determinen las áreas que necesitan un rediseño.
Sustentar el rediseño de diversos tipos de encajes protésicos transfemorales de miembro inferior a partir de la comprensión de la de temperatura ligada a las características mecánicas y fisiopatológicas intrínsecas a la condición de una amputación transfemoral que brindan una guía en el rediseño.
Objetivos Específicos.
Diseñar encajes transfemorales de miembro inferior acoplados a las características fisiológicas descriptivas de una amputación transfemoral de miembros inferiores.
Justificación
Justificación.
Las piernas son las extremidades que brindan estabilidad y robustez a un ser humano, todos tienen un pie más fuerte que el otro es decir que carga algo más del peso corporal esto se puede observar en el desgaste comparativo de los zapatos, si por cualquier razón se pierde una o inclusive las dos piernas no solo las actividades de la vida cotidiana se ven distorsionadas si no también la estabilidad física y emocional se verán comprometidas puesto que en un origen natural las piernas brindan la posibilidad de desplazarse de un lugar a otro y considerando que su función primaria mas critica es garantizar el poder estar fuera de peligro en un tiempo corto toda aquella modificación a este sistema de locomoción natural afecta de una manera contundente en diversos aspectos de nuestra constitución corporal y mental.
La amputación de un miembro puede presentarse en personas de todas las edades desde niños hasta personas de la tercera edad. Es sumamente importante desarrollar y mejorar dispositivos biónicos que logren una correlación entre sistemas biológicos y sistemas electromecánicos que ayuden a los usuarios a realizarse física y mentalmente y sobre todo a desarrollar una vida cotidiana con normalidad logrando de esta manera una productividad y desarrollo personal, profesional, físico y emocional completo.
El presente trabajo se fundamenta ante la profunda necesidad de mejorar el diseño de los dispositivos biónicos de miembro inferior, campo que se encuentra aun incomprendido, pues no se contempla el análisis de los factores interventores que empleando la especialidad ingenieril de la instrumentación profesional se ven descritos entendiendo los menesteres de un amputado protésico transfemoral.
Justificación comprender la condición fisiopatológica de un protésico. Implementar dispositivos electrónicos que pueden realizar la mesura, acondicionamiento y trasmisión de las variables de estudio a través de señales que indican los sucesos descriptivos en la zona de interacción entre el muñón residual y el encaje protésico es una manera de lograr realizar caracterizaciones más cercanas a la realidad patológica de la marcha del usuario amputado. Una prótesis tiene como finalidad que el individuo no tenga ni dolor ni tensión y esté tan cómodo como sea posible.
I
II
El avance en el diseño las de prótesis ha estado ligado directamente al entendimiento de la biomecánica del cuerpo humano estudio que a su vez es ligado al avance en el manejo y desarrollo tecnológico de los diversos instrumentos, de medición de variables descriptivas de cualquier proceso, empleados por el hombre así como nuevos mecanismos. En este apartado se muestra el desarrollo de los encajes protésicos para miembro inferior. El Instituto Nacional de Estadística y Geografía (INEGI) en 2010 censó dos millones 400 mil mexicanos con impedimentos para moverse por cuenta propia.
Estado del Arte
I.1Generalidades.
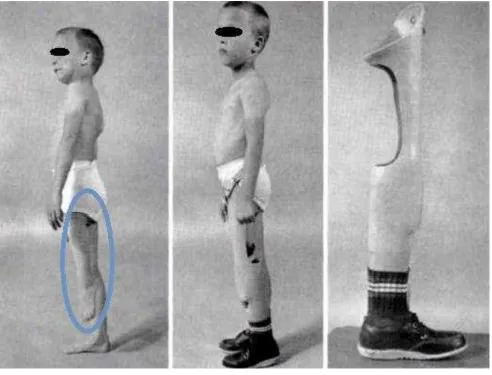
[image:16.612.71.564.325.700.2]El trasladar un mecanismo a disposición directa de una persona para sustituir un miembro que le ha sido amputado no es sencillo. Aunque los principios de funcionamiento sean muy similares, hay que considerar aspectos adicionales tales como el confort, la versatilidad, el nivel de desempeño, el peso, el suministro de energía, y la apariencia física. A este nuevo mecanismo a disposición completa de una persona se le conoce como prótesis siendo esta una extensión artificial que remplaza o provee de una parte del cuerpo que falta por diversas razones. El principal objetivo de una prótesis es sustituir una parte del cuerpo que haya sido pérdida por una amputación o que no exista a causa de un mal congénito como la meromelia (figura I.1), cumpliendo las mismas funciones que la parte faltante. [1]
Estado del Arte Meromelia: es un defecto congénito caracterizado por la falta de una o más extremidades con la presencia de una mano o un pie. Esto resulta en una extremidad encogido y/o deformada. [1]
I.2 Cronología del desarrollo de los encajes protésicos para miembro inferior.
Una prótesis es un elemento desarrollado con el fin de mejorar o remplazar una parte o un miembro completo que es disfuncional, por lo tanto, una prótesis colabora con el desarrollo psicológico para el usuario creando una percepción de totalidad al recobrar movilidad y aspecto. [2]
como se muestra en la figura I.2.
Estado del Arte Iván Long cambio, con respecto a su estudio, la geometría del encaje protésico como se muestra en la figura I.3 donde se aprecian modificaciones anatómicas adaptadas a la geometría del muñón residual. [3]
Fig. I.3 Geometría de Iván Long.
En 1980 el programa de cómputo para la producción de encajes protésicos CASD, añade la facilidad de poder mover los puntos de referencia dentro de un patrón de rectificado en base a los estudios realizados por Iván Long. En la actualidad una serie de sistemas están disponibles con una variada gama de modificaciones, estos se utilizan generalmente para la producción de tomas transtibiales.
Las cuatro medidas principales de la versión de CASD de 1980 son las siguientes:
1. Anteroposterior (AP) La dimensión es tomada con el paciente sentado sobre una superficie dura.
La dimensión se mide desde la parte superior, extensión del tendón aductor y largo de la tuberosidad isquiática (figura. I.4a).
2. Medio lateral (ML) dimensión que se mide desde el tendón del aductor de la lateral medida de la cabeza del trocánter (figura I.4b).
3. Circunferencial (Circ) dimensión que se mide con una cinta de medir con suficiente tensión, para que simplemente no hay ninguna holgura, a la altura del perineo
(figura. I.4c).
Estado del Arte
Fig. I.4 a) Anteroposterior (AP), b) Medio lateral (ML), c) Circunferencial (Circ), d) Longitud (LEN).
Novicov y Foort implementaron, en 1982, las técnicas de CAD CAM para producción personalizada de encajes logrando ser los pioneros ante la aplicación de técnicas de CAD CAM haciendo de esta la primer técnica sugerida para la producción de encajes protésicos más exactos inicialmente para tomas transtíbiales utilizando un programa de software para diseñar el encaje protésico que a través de una fresadora talla el diseño final como modelo sólido. El programa de diseño del encaje se basa en una toma de referencia modificada por el programa para ajustarse al paciente. [3]
Estado del Arte
Fig. I.5 a) Preparativo anterior a la toma de datos. Los puntos de referencia son colocados de manera ascendente tomando un eje vertical del muñón, los puntos son espaciados a intervalos regulares alrededor del muñón. b) Toma de datos. Son registrados los radios que han cambiado, y la nueva forma se almacena
como un nuevo conjunto de valores radiales para su posterior tallado.
El paso final es el tallado de cada uno de los puntos en la superficie del modelo del encaje en que se pueden incrementar o reducir de forma individual, permitiendo cualquier forma libre para ser creado mostrado en la figura I.6. [3]
Estado del Arte Posteriormente a la medición de la envoltura de muñón, interpreta la serie de radios registrados por los sensores y ejecuta un tallado en el molde cóncavo de yeso a través de una fresadora.
Hay distintas formas en que el software puede determinar la forma final del encaje tanto modificar la forma inicial moldeando el yeso en el muñón de "pre-forma" del muñón como también puede ser seleccionado un patrón determinado de rectificación que puede "esculpir" individual mente los puntos finales.
Después de realizar la digitalización completa el equipo contiene dos archivos de datos, es decir, la forma a escala adecuada y la digitalización de la porción distal de la extremidad utilizando el punto de referencia en cada archivo para que los dos archivos tengan la orientación adecuada de esta manera las coordenadas se recalculan los valores de los archivos proponiendo la mejor geometría. Sin embargo, en esta etapa los dos archivos de datos no coincidirá con suavidad, a pesar de ello este nuevo software combina los dos archivos juntos de tal manera que, si es necesario, ajusta la longitud de la forma para que coincida al mismo tiempo con la dimensión de longitud adoptada originalmente. El resultado es una forma de la toma suave se muestra gráficamente en el ordenador esto se muestra en la figura I.7. [3]
Estado del Arte En esta etapa inicial de la toma de forma, de ser necesario, acepta rediseños y ajustes. Una pantalla es presentada al protésico mostrándole gráficamente las modificaciones que están disponibles. Estos son ajustes en los valores Medio Lateral (ML), Antero posterior (AP), y Circunferencial (Circ) dimensiones y en la longitud total del encaje. Después de cualquiera de estas modificaciones, el encaje es rediseñado para adaptarse a los nuevos requisitos. [3]
Una guía aproximada de los tamaños relativos de estas dimensiones es la siguiente, y de hecho el programa de ordenador permite entrar del valor Circ solamente, siendo los otros valores estimada por estas fórmulas mostradas en un encaje de prueba en la figura I.8:
AP = (1/5) Circ ML = (1/3) Circ
Estado del Arte Las principales ventajas del diseño asistido por computadora sobre el diseño convencional son que en la computadora mantiene un registro exacto de la forma y las modificaciones realizadas en un formato digital. Esto tiene la ventaja de aumentar la previsibilidad de la adecuación de un encaje, especialmente cuando el diseño de un nuevo encaje se basa en el diseño de un encaje anterior del usuario pero con alteraciones de menor importancia. Un ejemplo de un zócalo hecho de plexiglás claro puede verse en la Figura I.9. [3]
Fig. I.9 Encaje diseñado a base del sistema CASD modificado a menester del usuario.
En 1990 Gerhard Fitzluff, un distinguido protesista alemán muestra la IPOS ™. Una
interfaz que se conecta con un programa CAD, figura I.10.
Estado del Arte Este autor desarrolló un sistema implementado para la realización de mediciones específicas en la cara interna del encaje protésico que junto con los datos obtenidos proporcionaron la información que se utilizaría para la generación de un modelo sólido para su fabricación mostrada en la figura I.11 los sistemas CAD que trabajan sobre principios geométricos de una superficie proporcionan un sistema de datos en forma de malla facilitando ensayos posteriores. Con el uso de un sistema CAD se crean mediciones y a partir de ello ajustes en los volúmenes del encaje protésico para evaluar la diferencia como se muestra en la figura I.12. [4]
Fig.I.11 Sistema CAD para diseño asistido por computadora CAD.
Estado del Arte En 1990 la International Committee of the Red Cross en Suiza ICRC© (Comité Internacional de la Cruz Roja) prefirió desarrollar su propia técnica en lugar de comprar componentes ortopédicos ya hechos que generalmente son demasiado caros e inadecuados estableciendo en marcha sus programas de rehabilitación física disponibles a nivel local. [5]
Materiales tales como madera, cuero y metal fueron los más utilizados, y fueron componentes ortopédicos fabricados en Suiza. En la década de 1990 el ©ICRC comenzó el proceso de normalización de las técnicas utilizadas en sus diversos proyectos en todo el mundo en aras de la armonización entre los proyectos, pero lo más importante, para mejorar la calidad de los servicios a los pacientes. El polipropileno (PP) se introdujo para la fabricación de encajes protésicos además fueron producidas la articulación de la rodilla en 1991 y otros componentes tales como sistemas de alineación, desarrollados por primera vez en Colombia y mejorándolos gradualmente. [5]
Fig. I.13 Articulación de la rodilla y sistemas de alineación.
La ICRC© Indico, en 2006, a través del programa “alignment Jig For lower-limb Prosthetics
Estado del Arte requerimientos descriptivos del uso de la tecnología del polipropileno adoptada para la fabricación de encajes protésicos debe ser:
Duradera, cómoda y de fácil colocación, para los pacientes en tanto uso como mantenimiento; Fácil para los técnicos de aprender, usar y reparar,
Termoestable y compatible con el clima en diferentes regiones del mundo,
Bajo costo, pero con un buen diseño y acorde con las normas internacionalmente aceptadas.
La ICRC© Indicó en septiembre del 2006 que todas las técnicas de fabricación tienen sus propios requisitos específicos por lo que contribuyo con nuevas técnicas basadas en el uso del polipropileno que fueron desarrolladas por el programa de rehabilitación física de la ICRC© que también están sujetas a la regla de deber combinar calidad, facilidad de uso y bajo costo. En la mayoría de las técnicas utilizadas para la fabricación del encaje de
polipropileno, la conexión componente, llamada “copa” (figura I.14), es el enlace que mantiene juntas las otras partes de la prótesis como la rodilla, el eje de tobillo, el mecanismo de tobillo y pie. Usar esta técnica significa que la alineación debe ser ajustada antes de la toma de proceso de termo formado. [5]
Estado del Arte La ICRC© diseñó y fabricó, en 2006, plantillas para ayudar a Prótesis y Ortesis (P & O) y a diversos técnicos a completar las fases de alineación con la facilidad y precisión requeridas permitiendo:
La suspensión y la inmovilización de la plantilla de alineación.
La rotación alrededor del eje de la tubería; hacia adelante, atrás y movimientos laterales.
La plantilla de alineación es un marco de acero inoxidable de 2 metros de altura y 0,8 metros de fondo y 0,8 metros de ancho que inmoviliza la pieza de conexión y ajusta la altura los movimientos posibles para el posicionamiento en el espacio son movimientos longitudinales, movimientos laterales y la rotación del encaje (figura I.15). [5]
Fig. I.15 Plantilla de alineación ICRC©- P & O.a) Movimiento longitudinal, b) movimiento lateral c) Movimiento de rotación angular.
Estado del Arte El uso de una prótesis cuenta con la problemática intrínseca de las caídas recurrentes y peligrosas puesto que el hecho de encontrarse en un andén de trenes y caer precipitada e inconvenientemente en el momento en que llegue el transporte puede resultar fatal. Para satisfacción de esta problemática se han desarrollado elementos mecánicos que salvaguardan estas posibilidades técnicamente anulándolas. [6]
Laurent Frossard (2010) propuso el uso de un dispositivo de protección instalado en la prótesis como una posible solución logrando que las caídas se vieran disminuidas con la instalación de este dispositivo dentro de la prótesis automatizando la detección de caídas. El tiempo de acción del mecanismo de protección resolvió, de manera automatizada, la detección de caídas y la acción del mecanismo de protección. Algunos de los datos del tiempo y la duración del descenso durante las caídas de un amputado transfemoral se produjeron durante la asistencia a diversas sesiones de medición y evaluación de la marcha afectada por la carga natural aplicada en el residuo. Prótesis y Ortesis Internacional demostró en 2010 que el impacto es secuencial y los principales factores en la fuerza del impacto y el momento correspondían a 133% del peso total corporal detectando automáticamente el tiempo de descenso. El encaje incluye un adaptador y un transductor en la rodilla usada habitualmente. [6]
Los componentes de fuerza y de momentos mecánicos, a que se refiere la carga, fueron medidos con una precisión superior a 1 nanosegundo y 1 nanómetro, respectivamente, usando un transductor de seis canales. La carga fue registrada por Prótesis y Ortesis Internacional en 2010 con ayuda de un ordenador portátil a 200 hz. El transductor fue coaxial con el tiempo es decir que actuó similar y paralela al número de cambios registrados. [6]
Estado del Arte La caída puede parecer repentina a simple vista, sin embargo, dicho estudio demostró que una corta transición entre la marcha y la caída caracteriza el descenso por momentos que se produjeron de forma secuencial en las tres fuerzas y momentos mecánicos descriptivos del muñón al momento de realizar la marcha con normalidad. [6]
La sensibilidad y especificidad de un algoritmo automático accionado mediante la combinación de varios métodos de detección basada en la desviación de las cargas medidas en sus propios mecanismos de detección es notablemente superior en comparación con la sensibilidad de una plantilla previamente configurada para el mismo propósito. Ello también destacó que uno de los retos de este algoritmo es diferenciar las desviaciones debidas a una caída real y los cambios relacionados con los normales dentro de las actividades de la vida diaria, incluyendo la inactividad, momentos de carga y marcha cotidiana. En la figura I.16 se observa la lógica del mecanismo diseñado en respuesta a la problemática cúspide. [6]
Fig.I.16 Descripción general de las características genéricas de un dispositivo de protección. Sensor (1A), control (1B) y mecanismo (1C) que participan en la detección de caída (2A) y la protección del residuo (2B),
Estado del Arte Otto Bock Quality For Life® desarrolló en 2011 el dispositivo SIT-Cast. Un modelo de referencia para realizar un encaje que se adapta a las necesidades fisionómicas del usuario mejorando el dispositivo a través de una forma establecida para facilitar la fabricación de encajes transfemorales. [7]
A través del modelo SIT-Cast. Quality For Life® realizo ensayos especiales a la medida del muñón residual lo cual se traduce en una ortopedia de calidad para el usuario de encajes transfemorales (figura I.17) desarrollando mejoras como:
Mayor comprensión de la anatomía básica de un muñón transfemoral y las diferencias funcionales en el diseño anatómico del encaje.
Impresión anatómica con la tecnología SIT-Cast para una mejor toma y modificación de los distintos aspectos interventores en la forma del muñón.
Indicaciones y técnicas de aplicación de diferentes materiales.
Fabricación de un encaje de prueba utilizando la técnica de moldeo por vacío con ayuda del SIT-Cast®.
Comprensión práctica y teórica de prótesis de rodilla, articulaciones y biomecánica de las extremidades inferiores. [7]
Estado del Arte En 1952 Per-Ingar Branemark de la Universidad de Lun en Suecia, descubrió de forma casual el fenómeno de la osteo-integración. Utilizó un implante de titanio para estudiar el flujo sanguíneo en los huesos del conejo y encontró que el implante no podía ser retirado al final del experimento la única forma de hacerlo era rompiendo el hueso o el implante. Así nació la osteo-integración. [8]
La osteo-integración es una técnica que consiste en la fijación directa de una prótesis al muñón óseo. Por tanto, la osteo-integración es un fenómeno biofísico que produce una unión a nivel molecular del titanio con el hueso figura I.18. El primer implante en hueso humano se realizó en 1960. Esta técnica en un principio fue utilizada a partir de los años sesenta por Per-Ingar Branemark en la implantación protésica de piezas dentales y faciales. [8]
Las investigaciones fueron seguidas posteriormente por el Hospital Universitario de Goteborg en Suecia y se llevaron a la utilización por primera vez en 1990 en una paciente con amputación de miembro inferior. [8]
Estado del Arte En la actualidad sólo se considera la osteo-integración para amputados transfemorales (figura I.19) que han sido incapaces de alcanzar un nivel satisfactorio de rehabilitación mediante técnicas convencionales. [9]
Fig. I.19 Usuario transfemoral beneficiado por la técnica de osteo-integración.
J. Sullivan, M. Robinson y S. Roehampton en 2003 recomendaron aplicar criterios de selección de candidatos a la técnica osteo-integración. Establecieron los siguientes puntos como criterio de selección
Los posibles candidatos deberán cumplir:
los candidatos deben haber probado encajes convencionales.
Deben haber cumplido con el ciclo completo de madurez del esqueleto y tener la anatomía del esqueleto normal.
No deben ser mayores de 70 años de edad.
la masa de los candidatos cuerpo no debe ser superior de 100 kg.
Estado del Arte Según J. Sullivan, M. Robinson y S. Roehampton las etapas quirúrgicas y de rehabilitación de la osteointegración transfemoral requieren de dos procedimientos quirúrgicos. La primera etapa implica la instalación de un implante de titanio en el eje del fémur residual una vez que la cicatriz distal en el muñón se haya curado, es posible usar un encaje antes de la segunda etapa. [9]
Los beneficios físicos que J. Sullivan, M. Robinson y S. Roehampton estiman en su
artículo “Rehabilitación del amputado transfemoral con prótesis osteointegrada” son:
Mejora del movimiento en torno a la articulación de la cadera.
Osteo-percepción, es decir mejora sensorial como resultado de la relación directa con el sistema esquelético.
Reducción de los problemas de los tejidos blandos.
La rehabilitación de amputados con prótesis osteointegradas (OPRA) contiene directrices con respecto a la función y actividad de los candidatos. La masa corporal máxima para los posibles candidatos es de 100 kg con la finalidad de limitar el estrés mecánico que actúa alrededor del muñón y la prótesis osteointegrada que se debe utilizar dentro de un rango limitado de actividades. [9]
El departamento de Ingeniería Mecánica, de la Universidad de Antioquia, Colombia,
presentó el análisis de la influencia del porcentaje del miembro residual en la distribución de esfuerzos y presiones en la interfaz socket-muñón” en su VIII congreso colombiano de
métodos numéricos en agosto del 2011, Estudio que resulta comparativo sobre la magnitud y distribución de esfuerzos en la interfaz encaje-muñón en relación a la longitud del miembro residual. Este estudio es una primera aproximación utilizando el método de los elementos finitos con el objetivo de obtener información que permita aumentar la sensación de confort en los amputados transfemorales durante la utilización de la prótesis.
Estado del Arte Tabla I.1 Características de los voluntarios transfemorales.
Individuo Altura
[mts.] Peso [Kg.]
Longitud del muñón*
[mts.]
% Miembro residual
I1 1,75 mts. 75,0 Kg. 0,24 mts. 70%
I2 1,53 mts. 53,2 Kg. 0,24 mts. 80%
I3 1,67 mts. 79,8 Kg. 0,28 mts. 86%
I4 1,63 mts. 63,5 Kg. 0,29 mts. 91%
I5 1,65 mts. 88,7 Kg. 0,30 mts. 93%
*Medido desde el trocánter mayor.
Se tuvieron en cuenta las propiedades mecánicas del hueso, tejidos blandos y las cargas aplicadas al encaje durante la fase de apoyo de la marcha, además de las definiciones de contacto entre los diferentes componentes (encaje, muñón y hueso residual), los tiempos de aplicación de las cargas y desplazamientos en las diferentes fases de la simulación y las restricciones de movimiento aplicadas al acetábulo de la cabeza femoral. [10]
Acetábulo: Cavidad del hueso ilíaco de la cadera donde se inserta y articula la cabeza del fémur de las extremidades posteriores. También se denomina cavidad cotiloidea . [1]
Desde el punto de vista del diseño de prótesis, se identifica la zona medial del muslo como un lugar común para todos los individuos donde las presiones y esfuerzos alcanzan magnitudes elevadas. Esto es independiente a la geometría u otras características propias de cada sujeto, por lo que se podría pensar en un rediseño de esta zona que disminuya estas variables y desemboque en una mejora generalizada de la eficiencia y posiblemente de la sensación de confort. [10]
Estado del Arte crítico para este estudio se debe a que es en esta fase donde se presentan las mayores reacciones en el piso y se asume que por esta razón los esfuerzos en la interfaz encaje-muñón serán también mayores. [10]
I.3 Planteamiento del problema.
Está claro que existe una inclinación congénita a usar los recursos propios de las capacidades físicas naturales de cada individuo de una manera nata esto se hace evidente al observar la determinación de los niños para andar, gatear y manipular objetos sin aprendizaje previo del dominio de las facultades motrices.
Una amputación, del tipo y nivel que fuese, es sin lugar a dudas un contradicho a esta inclinación congénita ya que al verse desprovisto de alguna extremidad el cuerpo humano sigue conservando el instinto de valerse por los medios propios. Lo que genera un sentimiento de inconformidad intrínseco a su condición física, sin embargo el empleo de la prótesis adecuada y correspondiente logra satisfacer al usuario de una manera integral al solventarle no solo en el sentido del soporte mecánico si no también contribuyéndole en un desarrollo personal, físico, emocional, profesional y social al brindarle confianza y autoestima a través de una apariencia aceptable que le devuelva la robustez para continuar sus actividades cotidianas. No obstante la personas que han sufrido una amputación se encuentran incomprendidas en su condición física sometiéndose al uso de una “prótesis de aparador” que solo brindan un bulto al lugar de perdida de miembro
dejando de lado factores como la caracterización personalizada de una prótesis que atienda no solo el aspecto físico si no también comprenda y satisfaga el grado de maniobrabilidad mecánica y confort que demanda cada usuario. Se debe comprender que una amputación tiene variaciones de acuerdo a su tipo y que de ninguna manera habrá 2 casos exactamente iguales.
Estado del Arte mecánicas robustas y maniobrables a través de una serie de sensores y herramientas para la caracterización de las condiciones fisiológico-mecánicas de manera personalizada y con ello comprender la particularidad de cada caso. Logrando ver comprendidas las limitaciones funcionales es posible ejecutar el diseño de manera inteligente y mejorar las características acercándolas a la realidad descriptiva de cada usuario.
I.4 Objetivos del proyecto y organización de la tesis.
Los principales objetivos de este trabajo de tesis son optimizar el diseño de los diversos encajes protésicos mediante el análisis de variables primarias medidas, y la instrumentación efectuada a un encaje protésico de miembro inferior la cual no es solo una tarea encaminada a crear un sistema de interpretación generalizado, sino mas bien a comprender de manera particular las características que puedan generar un encaje protésico de miembro inferior con un diseño mejorado en las características descriptivas del encaje.
De manera independiente a las características propias de cada sujeto, las variables alcanzan valores pico relativos al bien estar del usuario amputado en la zona medial debido a que el musculo de la pierna es de mayor tamaño y su consumo energético desencadena una sucesión de cambios fisicoquímicos y por consiguiente la comprensión de las variables descriptivas desembocan en una mejora generalizada de la eficiencia y de la sensación de confort sustentada por resultados como los verificados en este congreso.
Para poder alcanzar los objetivos aquí planteados, este trabajo se ha organizado de la siguiente manera:
Estado del Arte
En el Capítulo 3, “Reconstrucción Digital Del Muñón Residual” el conocimiento de las condiciones geométricas, fisiológicas y mecánicas del miembro inferior del individuo a quien se le toma la muestra derivan en mayores beneficios como seguridad, comodidad y funcionalidad para que el usuario se desenvuelva lo mejor posible durante su vida cotidiana con un diseño exacto y moldeado por su propio muñón.
En el Capítulo 4, “Instrumentación” se observa que las variables físicas como la
temperatura y humedad varían constantemente de acuerdo a cada persona y realizar monitoreo a través de instrumentos resulta fundamental para tener conocimiento acerca de la descriptiva corporal de cada individuo para realizar una elección inteligente y cualitativa de un material adecuado que incluso obedezca a las facilidades económicas de cada usuario puesto que resulta terminantemente innecesario implementar un material costoso cuando el usuario puede obtener un material de menor costo y que cumpla con sus necesidades.
I.5 Sumario.
En 1996 ÖSSUR Kristinsson en el Reino Unido llegó a la conclusión de que aun así
teniendo la superficie total del residuo transfemoral “No existe un método definitivo para
realizar el diseño de encajes transfemorales, o la captura de datos que todos deben aprender en un sentido unificador” [4]
El Dr. REDHEAD PhD concluyo en su tesis “Amputación Transfemoral” en el año de 1991
que "Independientemente de la forma del encaje o el diseño bien distribuido de soporte de peso, se puede eliminar la rodilla por un solo punto óseo de soporte de peso" [4]
El Dr. F GOTTCHALKC dice en su artículo NOVEDADES EN TRANSCASTING FEMORALCLINICA, publicado en agosto del 2008, que "Con mucha frecuencia, el procedimiento se realiza sin pensar en la bio-mecánica, los principios o la preservación de
la función muscular” [4]
La amputación es un tipo de intervención quirúrgica que se realiza hace siglos con el objetivo de reducir la invalidez. Actualmente el tratamiento de la persona amputada abarca no solo cirugías, sino también la instauración y ajuste de un miembro artificial.
Se sabe que las amputaciones de miembros inferiores son de 7 a 8 veces más frecuentes que las de miembro superior.
Etiología de la
Amputación
I
Etiología de la amputación
II.1 Generalidades.
Una amputación es una condición que puede afectar de manera directa tanto a infantes como a los adultos, ya que puede ocurrir en cualquier momento de la vida
Se reconoció en términos generales que el problema de los amputados es asunto de interés mundial cuyas consecuencias sociales, económicas, industriales y psicológicas distan mucho del limitarse a las personas que han sufrido la amputación.
Etiología de la amputación
II.2 Anatomía del miembro inferior (pierna humana).
La pierna es un complicado sistema de segmentos y uniones musculares que comprenden el miembro inferior. Aun así, situaciones dinámicas como correr, saltar brincar o moverse con agilidad no parece abrumar al cuerpo humano por la complicada tarea de controlar las piernas. Esto se debe a un cuidadoso arreglo y afinación de todos los sistemas interventores y propiedades de las cuales la estabilidad y la robustez emergen notoriamente. Los sistemas robustos y estables son fáciles de controlar. Como se muestra en la figura II.I la estructura de la pierna humana esta dividida en 3 segmentos principales: La cadera, la pierna y el pie. [12]
Etiología de la amputación Hablando en un sentido estricto la pierna humana es considerada como el segmento comprendido entre la cadera y el tobillo sustentada por dos grandes sistemas de apoyo y robustez de carga, el sistema óseo y el sistema muscular. En la figura II.2 son mostrados los huesos componentes de la pierna por parte del sistema óseo. [12]
Etiología de la amputación El fémur (figura II.3) es el hueso más largo, fuerte y voluminoso del cuerpo humano. Esta unido por medio de una articulación en su extremo superior al hueso coxal que conforma la cadera y en su extremo inferior a la tróclea uniéndose a la tibia en la rodilla por medio de la articulación femorotibial. [12]
Fig. II.3 Fémur humano.
La rotula o patela (figura II.4) es un hueso grueso que protege la parte frontal de la articulación de la rodilla. Su función principal es la extensión de la rodilla aumentando la palanca generada por el tendón en el fémur aumentando el ángulo en que este actúa. [12]
Etiología de la amputación La tibia (figura II.5) es el segundo hueso más largo del cuerpo humano después del fémur. Está articulada en su parte superior con el fémur y la rótula, lateralmente con el peroné y en su parte inferior con el tobillo. [12]
Fig. II.5 Tibia y Peroné.
Etiología de la amputación Por otra parte el grupo muscular superior es mostrado en la figura II.6
Fig. II.6 Grupo muscular superior. II.6a) Aductor mayor, II.6b) Tensor de faja alta, II.6c) Bíceps femoral, II.6d) Semitendinoso, II.6e) Semimembranoso, II.6f) Vaso lateral,
II.6g) Vaso medio, II.6h) Recto femoral, II.6i) Vaso intermedio.
Los principales músculos de esta sección son:
Etiología de la amputación (figura II.6d) y Semimembranoso (figura II.6e). Su función es extender el muslo y flexionar la rodilla. Él cuádricep es un musculo grueso formado por cuatro partes. Vaso medio (figura II.6g), Vaso intermedio (figura II.6i), Vaso lateral (figura II.6f) y Recto femoral (figura II.6h) los tres primeros se originan en la parte alta del fémur y terminan en un grueso tendón a nivel de la rótula. El recto femoral inicia delante de la pelvis extendiéndose por encima del muslo y terminando en el mismo tendón al nivel de la tibia. Su función es extender la rodilla y flexionar la cadera.
A su vez el grupo muscular inferior es mostrado en la figura II.7 está compuesto por una sub división de tres grupos: a) vista posterior, b) vista anterior y c) vista lateral.
Figura II.7 Grupo muscular inferior, II.7a) Tibia anterior, II.7b) Extensor largo de los dedos, II.7c) Extensor largo del dedo gordo, II.7d) Peronéo tercero, II.7e) Peronéo largo, II.7f) Peronéo corto, II.7g) Gastrocnemio,
II.7h) Soleo, II.7i) Plantar.
Compuesto por los grupos musculares:
Etiología de la amputación abajo en el cuneiforme I y el extremo posterior del metatarsiano I en el pie. Este musculo tiene la función de flexor, aductor y rotador de pie hacia adentro. El Extensor largo de los dedos (figura II.7b) comienza en el cóndilo lateral de la tibia extendiéndose en un tendón que se divide en cuatro y se inserta en los cuatro dedos del pie. Su función es la de extensor de los dedos y flexor del pie. El Extensor largo del dedo gordo (figura II.7c) comienza en la cara interna del peroné o fíbula y la membrana inter-ósea terminando en la falange distal del dedo gordo. Su funcióna como extensor del y flexor del pie. El Peronéo tercero (figura II.7d) se origina en la cabeza del peroné y termina en la base del quinto metacarpio. Su función principal es la de flexor, abductor y rotador del pie hacia afuera. Grupo lateral: Localizados a lo largo del lado externo de la pierna. Los principales músculos de este grupo son El Peronéo largo (figura II.7e) que comienza en la cabeza del peroné y la cara profunda de la fascia y que termina en el tubérculo externo del metatarsiano I. Su función es la de extensor, abductor y rotador del pie hacia afuera. El Peronéo corto (figura II.7f) que comienza en la cara externa el peroné y termina en la tuberosidad del metacarpiano quinto. Su función a cumplir es la de aductor del pie.
Grupo posterior: localizado en la pantorrilla. Los principales músculos componentes de este grupo son El Gastrocnémio (figura II.7g) originado en los cóndilos lateral y medial del fémur y en la capsula de la rodilla terminando en el calcáneo, es el más corto y grueso de los músculos de la pantorrilla siendo también el más visible. Su función es la flexión plantar del pie. El Soleo (figura II.7h) que se encuentra por debajo del gastrocnémio, comenzando en la cabeza de la fíbula y borde medio de la tibia y terminando el en calcáneo. Su función también es la flexión plantar del pie y elevación del talón. El Plantar (figura II.7i) comienza en el fémur por encima del cóndilo y termina en el calcáneo por medio del tendón de Aquiles. Su tarea es contribuir en la flexión plantar del pie.
Las articulaciones son zonas de unión entre los huesos o entre los cartílagos del esqueleto. Cumplen una función muy importante al permitir flexionar las extremidades del cuerpo, de no existir estas el cuerpo seria una estructura totalmente rígida.
Etiología de la amputación adaptan la superficie articular del fémur y la tibia entre ellas para incrementar la superficie de transmisión de fuerza.
Fig. II.8 Corte sagital de la rodilla.
Etiología de la amputación
II.3 Causas de la amputación.
Tradicionalmente se consideran tres amplios grupos etiológicos causantes de amputación: grupo A por Traumatismo, grupo B Patológico y grupo C Malformación Congénita.
Etiología: Parte de la medicina que tiene por objeto el estudio de las causas de las patologías y condiciones de salud. [1]
Traumatismo.
El traumatismo causante de amputación actúa produciendo una destrucción intrínseca al evento. Los accidentes más frecuentes son los de tráfico, industriales, incendios, congelaciones e inclusive aquellos originados por descargas eléctricas. En términos generales, se considera que los accidentes de trabajo producen un mayor índice de amputaciones en extremidades superiores (73 a 81% de las ocasiones) y los accidentes de tráfico y las enfermedades tienen un porcentaje más elevado sobre las extremidades inferiores (63% de las ocasiones). Indicar una amputación genera rechazo y aceptación por lo que se requiere generar una explicación como un procedimiento reconstructivo con una rápida rehabilitación en la mayoría de los casos. [13]
La idea grafica de la incidencia de la amputación originada en su etiología se exponen la figura II.10.
Origen Patológico 74%. Traumatismo 23%. Defecto congénito 3%.
Etiología de la amputación
II.4 Tipos de amputaciones.
Según la Clasificación Internacional de Patologías “CIE-10” décima versión correspondiente a la versión en español de la ICD, siglas que en inglés significan “International Statistical Classification of Diseases and Related Health
Problems”. Se realizan tipificaciones especificas de las cuales de desprenden dos clasificaciones correspondientes a miembros superiores y miembros inferiores. [14]
Esta clasificación muestra una sección dedicada a los usuarios con amputación superior en la Tabla II.1 presentada a continuación.
Tabla II.1 Amputaciones Traumáticas de Miembros Superiores según la Clasificación internacional de
patologías “CIE-10” décima versión. S48 Amputación traumática del hombro y del brazo.
S48.0 Amputación traumática articulación del hombro.
S48.1 Amputación traumática entre el hombro y el codo.
S48.9
Amputación traumática del hombro y del brazo, nivel no especificado.
S58 Amputación traumática del antebrazo.
S58.0 Amputación traumática a nivel del codo.
S58.1 Amputación traumática entre el codo y la muñeca.
S58.9 Amputación traumática del antebrazo, nivel no especificado.
S68 Amputación traumática de la muñeca y de la mano.
S68.0 Amputación traumática del pulgar (completa) (parcial).
S68.1 Amputación traumática de otro dedo único (completa) (parcial).
S68.2 Amputación traumática de dos o más dedos (completa) (parcial).
S68.3
Amputación traumática combinada (de parte) de dedo(s) con otras partes de la muñeca.
S68.4 Amputación traumática de la mano a nivel de la muñeca.
S68.8 Amputación traumática de otras partes de la muñeca y mano.
S68.9
Etiología de la amputación Dicha tabla se expresa de manera grafica en la figura II.1. En la que son representadas las características con que se clasifican las amputaciones de nivel superior referente al nivel de incisión con que se realizara la amputación.
La Clasificación Internacional de Patologías “CIE-10” décima versión también muestra una sección dedicada a los usuarios con amputación inferior en la Tabla II.2.
Dicha tabla se expresa de manera grafica en la figura II.11b
Fig.II.11 Amputaciones Traumáticas. a) Miembros Superiores. b) Miembros Inferiores.
Etiología de la amputación Tabla II.2. Amputaciones Traumáticas de Miembros Inferiores según la Clasificación internacional de
patologías “CIE-10” décima versión. S78 Amputación traumática de la cadera y del muslo.
S78.0 Amputación traumática articulación de la cadera.
S78.1 Amputación traumática entre la cadera y la rodilla.
S78.9 Amputación traumática de cadera y muslo, nivel no especificado.
S88 Amputación traumática de la pierna.
S88.0 Amputación traumática a nivel de la rodilla.
S88.1 Amputación traumática entre la rodilla y el tobillo.
S88.9 Amputación traumática de la pierna, nivel no especificado.
S98 Amputación traumática del pie y del tobillo.
S98.0 Amputación traumática del pie a nivel del tobillo.
S98.1 Amputación traumática de un dedo del pie.
S98.2 Amputación traumática de dos o más dedos del pie.
S98.3 Amputación traumática de otras partes del pie.
S98.4 Amputación traumática del pie, nivel no especificado.
En la que son representadas las características con que se clasifican las amputaciones de nivel superior referente al nivel de incisión con que se realizara la amputación. [14]
II.5 Criterios de la decisión de amputación.
Etiología de la amputación Tabla II.3 Indicaciones de Lange para la amputación primaria de fracturas de tibia con lesión vascular.
La amputación primaria será indicada si una de las indicaciones absolutas está presente o dos de las tres relativas coinciden. No se realizaron estudios clínicos posteriores para validar este sistema.
II.5.1 Índice del síndrome de la extremidad lesionada (ISEL).
En 1985, Gregory RT, Gould RJ, Peclet M publican el primer sistema de puntuación para las extremidades severamente lesionadas, el Índice del Síndrome de la Extremidad Lesionada (ISEL). Siendo necesaria la información del estado general de la lesión.
Combinando una escala de puntos de acuerdo a la lesión de partes blandas, lesión nerviosa, vascular, ósea, índice de severidad lesionar, edad, condición médica pre-existente y tiempo en que demoró la reparación vascular (Tabla II.4).
De manera regular el 100% de pacientes con un ISEL mayor de 20 puntos requieren amputación. Este índice tiene un valor predictivo con una sensibilidad de 6% y una especificidad del 90%. [15]
El ISEL tiene muchas variables que requieren de una evaluación quirúrgica para una determinación segura de su valor por lo que es imposible su aplicación en la valoración inicial de urgencia como sistema de puntuación. [15]
Indicaciones de Lange Paral Amputación Primaria de Fracturas de Tibia con Lesión Vascular Indicaciones Absolutas:
Disrupción anatómica total del nervio tibial posterior en el adulto. Lesión por aplastamiento con isquemia > 6 cm.
Indicaciones Relativas: Asociada a poli-traumatizado. Lesión ipsilateral severa del pie.
Etiología de la amputación Tabla II.4 Índice del Síndrome de La Extremidad Lesionada (ISEL).
Índice del Síndrome de la Extremidad Lesionada. <25.
25-50.
>50. Lesión en partes blandas.
Guillotina. Aplastamiento/quemadura. Avulsión. Lesión nerviosa. Contusión. Sección. Avulsión. Lesión vascular. Sección venosa. Sección arterial. Trombosis arterial. Avulsión arterial. Lesión ósea. Simple. Segmentaria. Segmentaria/conminuta. Pérdida de hueso > 6 cm. Articular
Articular con pérdida ósea > 6cm
Puntuación 1 2 3 1 2 3 1 2 3 1 1 2 3 1 2 3 4 5 6
Etiología de la amputación
II.5.2 Índice predictivo de salvación (IPS).
En 1987, Howe HR, Poole GV, Hansen KJ introdujeron el Índice Predictivo de Salvación (IPS) para el uso en pacientes con lesiones ortopédicas y vasculares combinadas. Menos complicado que el sistema ISEL, el sistema IPS asigna puntos de acuerdo al nivel de la lesión arterial, el grado de lesión ósea, el grado de lesión muscular y el intervalo de tiempo entre el momento de la lesión y el arribo del paciente al quirófano (Tabla II.5). [15]
Tabla II.5 Índice Predictivo de Salvación (IPS).
Índice Predictivo de Salvación.
Criterio. Puntuación.
Nivel de lesión arterial.
Suprapoplíteo. Poplíteo. Infrapoplíteo. 1 2 3
Grado de lesión ósea.
Leve. Moderada. Severa. 1 2 3
Grado de lesión muscular.
Leve. Moderada. Severa. 1 2 3
Intervalo entre el momento de la lesión y la operación.
<6 h. 6-12 h. >12 h. 0 2 4