Escuela Superior De Ingeniería Mecánica Eléctrica Unidad profesional “Adolfo López Mateos”
Ingeniería en Comunicaciones y Electrónica
“SISTEMADE PROXIMIDAD PARA LA ELIMINCIÓN DE PUNTOS CIEGOS”
PROYECTO TERMINAL
Presentada para obtener el título de:
Ingeniero en Comunicaciones y Electrónica
Presenta:
Mendoza Granados Gerardo Torres Jiménez Erick Antonio Villegas Amezcua Gustavo Daniel
Asesores:
Morales Becerra Pedro Martin Ing. César Israel Pérez Macías
Contenido
Introducción ... iv
Objetivo ... vi
1. MARCO teorico ... 1
1.1. Sensores ... 1
|11.1.1. Antecedentes ... 1
1.1.2. Descripción de un sensor... 2
1.1.3. Tipos de sensores... 3
1.1.4. Sensor Piezoeléctrico ... 3
1.1.5. Aplicación ... 7
1.2. Reloj ... 7
1.2.1. Tipos de relojes. ... 8
1.3. Microcontrolador ... 9
1.3.1. ¿Qué es? ... 9
1.3.2. Características ... 9
1.3.3. Funciones ... 12
1.3.4. Aplicación ... 12
1.3.5. Arquitecturas ... 13
1.4. Procesamiento de señales analógicas ... 14
1.5. Procesamiento digital de señales ... 14
1.5.1. Muestreo ... 15
1.5.2. Teorema de Nyquist ... 15
1.5.3. Frecuencia de muestreo ... 18
1.5.4. Cuantificación ... 19
1.6. Óptica ... 20
1.6.1. Espejos ... 20
1.6.2. Reflexión y Refracción ... 23
1.6.3. Visión humana ... 29
1.7. Onda mecánica ... 32
1.7.1. En función de su propagación o frente de onda ... 33
1.7.2. En función de la dirección de la perturbación ... 33
1.7.3. En función de su periodicidad ... 34
1.7.4. Frecuencia ... 34
1.7.5. Ultrasonido ... 35
1.7.6. Velocidad de propagación del sonido... 35
1.7.1. Longitud de onda ... 36
1.8. MATLAB ... 37
1.8.1. MATLAB aplicado a la Ingeniería ... 39
2. Deteccion de puntos ciegos ... 40
2.1. Planteamiento del problema ... 40
2.2. Puntos ciegos ... 40
2.3. Solución ... 41
2.4. Diagrama a bloques del sistema ... 42
2.5. Instalación ... 43
2.6. Rango del dispositivo instalado... 45
3. Sistema de deteccion ... 46
3.1.1. Resumen ... 47
3.1.2. Potencia ... 47
3.1.3. Memoria ... 48
3.1.4. Entrada y salida ... 49
3.1.5. Comunicación ... 50
3.1.6. Programación ... 51
3.1.7. Características físicas ... 51
3.1.8. Temporizador ... 51
3.1.9. Uso del Arduino ... 52
3.2. Código fuente para el micro controlador ... 52
3.2.1. Diagrama de flujo del programa ... 52
3.3. Indicador Visual ... 58
3.3.1. Diodo emisor de luz ... 58
3.4. Funcionamiento del detector ... 58
3.5. Medición de temperatura ... 59
3.5.1. LM35... 59
3.5.2. Características ... 60
3.5.3. Aplicación ... 60
3.5.4. Observación... 62
4. Implementación y Pruebas ... 63
4.1. Prototipo ... 63
4.2. Implementación de MATLAB ... 64
4.2.1. Código Fuente del MATLAB ... 64
4.3. Cálculos de temperatura ... 67
4.4. Pruebas en tiempo real ... 68
4.4.1. Descripción: ... 69
4.5. Pruebas con osciloscopio ... 74
4.6. Resultados ... 75
Conclusiones ... 77
Glosario ... 78
Anexo ... 80
Introducción
Los accidentes Automovilísticos ocurren cuando menos se espera, existen diferentes tipos de accidentes, de acuerdo con la clasificación de Accidentes de tránsito del INEGI pueden ser:
Por colisión con vehículo automotor
Colisión con peatón
Colisión con animal
Colisión con objeto fijo
Volcadura
Caída de pasajero
salida del camino
Incendio
Colisión con ferrocarril
Colisión con motocicleta
Colisión con ciclista y otros.
De estos tipos de accidentes los que más predominan, de acuerdo con datos del INEGI (a los que se tuvo acceso), con fecha del año 2011 son:
Accidente Total de accidentes
Colisión con vehículos automotor 274,022
Colisión con objeto fijo 44,404
Colisión con peatón 15,872
Colisión con motocicleta 21,105
Colisión con ciclista 8,005
Analizando los datos del INEGI, estos tipos de accidentes tienen “causas” (motivo por el que ocurrieron), que son:
Conductor
peatón o pasajero
falla del vehículo
mala condición del camino
otra.
De estas la principal causa, la que más accidentes tiene, es la del conductor, con un total de 366,133 accidentes.
Todas estas cifras son importantes, porque de acuerdo a las investigaciones que realizó el INEGI, después de cada uno de estos accidentes, se menciona lo siguiente; Tomando en cuenta el 100 % de los accidentes (que son causados por el conductor), se tienen los motivos de estos, mostrando los siguientes porcentajes:
1.- Señalamientos de tránsito, 30% 2.- No tener a la vista el objeto, 20% 3.- Fallas de mecánicas, 20 % 4.- Distracción, 20%
5.- Distancia inapropiada, 5% 6.- Cansancio, 5%
Por la causa número 1, 3, 4, 5, 6, se es difícil diseñar un sistema que evite las colisiones; Por tal motivo el proyecto se enfocó en la segunda causa.
De la segunda causa, que se refiere a que el conductor no ve el objeto con el que se impacta, (en los datos recopilados por el INEGI) se dice que casi el 40% es por los
Objetivo
1. MARCO TEORICO
1.1. Sensores
1.1.1. Antecedentes
Es difícil saber exactamente cuando se creó el primer sensor o transductor, se puede ver en Internet cuando se creó cierto modelo de sensor, pero para un modo generalizado no se puede saber que paso, quien hizo el primer sensor esto; Es porque se ha utilizado desde hace mucho tiempo como los sensores mecánicos, por decir un ejemplo, en una válvula que se cierra a la hora que el agua de una cisterna se llena, este ejemplo aunque no necesita electricidad se observa claramente que es un sensor por que pudo detectar el nivel del agua con un flotador y accionó la válvula para cerrarse y evitó que siguiera llenándose de agua.
Ejemplos como este se puede ver en casi todo el mundo y a lo largo del tiempo, algo más primitivo seria las trampas que tendían para cazar en muchos lugares en los que con el movimiento de un cordón se actuaba algún tipo de trampa que dejaba inmovilizado al animal o hasta lo podía matar inmediatamente, como se ve los sensores han estado con nosotros durante mucho tiempo y lo van a seguir estando por que no dejan de actualizarse y estar a la vanguardia. Sin embargo, en la actualidad se debe tomar en cuenta que esto se ha vuelto como un sistema de instrumentación.
Ahora lo sensores con los que se cuenta son mucho más complejos y muchos de ellos pueden realizar diferentes tareas todo en un mismo encapsulado, cada vez se requiere más de cada elemento en la industria y con mucho más razón de los sensores que son imprescindibles en cualquier maquina ya sea industrial o doméstica.
1.1.2. Descripción de un sensor
Antes que nada se mostrarán tres definiciones que se encuentran en muchas enciclopedias electrónicas, que definen al sensor:
Componente que convierte energía mecánica en una señal eléctrica, ya sea generando la señal o controlando una fuente eléctrica, ya sea generando la señal o controlando una fuente eléctrica externa.
Transductor diseñado para producir una salida eléctrica proporcional a alguna cantidad que varía con el tiempo, como temperatura, iluminación, presión, etc.
Dispositivo o componente que reacciona ante un cambio; la reacción se aprovecha para hacer que funcione un control o instrumento; por ejemplo, la resistencia del transmisor se altera al cambiar la temperatura y esa modificación puede utilizarse en los circuitos eléctricos para variar la corriente.
Un sensor es un dispositivo empleado para convertir una magnitud física o química en una señal generalmente eléctrica que puede ser fácilmente procesada, almacenada o transmitida.
1.1.3. Tipos de sensores
Existen diferentes clases de sensores, algunos de los que existen son:
Sensor Magnético
Sensor de Posición
Sensor de Movimiento por Radiofrecuencia
Sensor Sónico de Movimiento
Sensor de Movimiento Ultrasónico
Sensor Infrarrojo
Sensor Fotoeléctricos
Sensor Piezoeléctrico
1.1.4. Sensor Piezoeléctrico
Un sensor piezoeléctrico es un dispositivo que utiliza el efecto piezoeléctrico para medir presión, aceleración, tensión o fuerza; transformando las lecturas en señales eléctricas.
El efecto Piezoeléctrico es conmutativo y también funciona en forma opuesta contraria a su dirección original. Esto quiere decir que al aplicar una descarga eléctrica a un cristal polarizado, el cristal se deforma produciendo un movimiento que genera presión acústica. La estructura de un cristal polarizado puede apreciarse en la figura 1-1.
Figura 1-1
1.1.4.1. Sensores Ultrasónicos
Figura 1-2 Sensor ultrasónico
1.1.4.1.1 Estructura
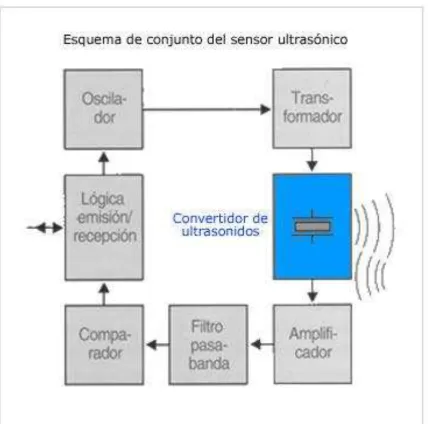
[image:12.595.137.470.322.718.2]Un sensor se compone de una caja de plástico con conexión por enchufe integrada, un convertidor de ultrasonidos (membrana de aluminio en cuyo lado interior hay pegada una pastilla piezo cerámica) y una placa de circuitos impresos con electrónica de emisión y evaluación (figura 1-3). Dos de las tres líneas eléctricas de conexión a la unidad de control sirven para la alimentación de tensión. Por la tercera línea, bidireccional, se conecta la función emisora y se transmite la señal de recepción evaluada de vuelta a la unidad de control (conexión de colector abierto de alto potencial de reposo) (figura 1-4).
Diagrama a bloques del sensor ultrasónico.
1.1.5. Aplicación
Los sensores ultrasónicos se utilizan para averiguar las distancias a la que se encuentran posibles obstáculos y para vigilar un espacio.
En la siguiente figura 1-5 se puede observar la radiación que logra alcanzar el sensor ultrasónico.
(Figura 1-5). Diagrama de radiación del sensor ultrasónico HC-SR04
El alcance de detección de un sistema de tal clase cubre una distancia de aprox. 0,25 a 4 m.
1.2. Reloj
La exactitud del reloj depende de la base de tiempos, que puede consistir en un oscilador o en un adaptador que, a partir de una referencia, genera una señal periódica.
El divisor de frecuencia es un circuito digital formado por una sucesión de contadores hasta obtener una frecuencia de 1 Hz, que permite mostrar segundos. Si se quiere mostrar décimas, la división se detiene al llegar a los 10 Hz.
Esta frecuencia pasa al módulo de presentación, que puede ser electrónico o mecánico, donde otros divisores van separando los segundos, minutos y horas para presentarlas mediante algún tipo de display.
1.2.1. Tipos de relojes.
El tipo de base de tiempos utilizada es tan importante que suele dar nombre al tipo de reloj. Las más habituales son:
Reloj de cuarzo. Sustituye el diapasón por un resonador de cuarzo,
habitualmente a 32768 Hz, por ser potencia exacta de dos, lo que simplifica el divisor de frecuencia. Por su estabilidad y economía ha desplazado a todos los otros tipos de reloj en las aplicaciones habituales.
Reloj atómico (rubidio, hidrogeno y cesio) Se basa en incluir en el lazo de realimentación una cavidad con moléculas de la sustancia adecuada; De manera que se excite la resonancia de alguno de sus átomos.
El reloj de cuarzo es un reloj electrónico que se caracteriza por poseer una pieza de cuarzo que sirve para generar los impulsos necesarios a intervalos regulares que permiten la medición del tiempo. El cuarzo se talla habitualmente en forma de lámina y se introduce en un cilindro metálico. Éste tiene por función la protección del mineral. Para que vibre el cristal de cuarzo, debe ser alimentado por un campo eléctrico oscilante generado por un circuito electrónico.
el circuito electrónico, corrigiéndose las desviaciones de frecuencia que pudieran producirse respecto a su valor nominal. La frecuencia natural de oscilación de un cristal de cuarzo depende tanto de su forma como de su tamaño por lo que puede ser seleccionada por el fabricante. Es de señalar que los relojes de cuarzo no son siempre digitales, siendo también muy habituales los relojes de cuarzo con mecanismo de agujas.
1.3. Microcontrolador
1.3.1. ¿Qué es?
Un microcontrolador es un circuito integrado programable, capaz de ejecutar las órdenes grabadas en su memoria. Está compuesto de varios bloques funcionales, los cuales cumplen una tarea específica. Un microcontrolador incluye en su interior las tres principales unidades funcionales de una computadora: unidad central de procesamiento, memoria y periféricos de entrada/salida.
Un microcontrolador no es igual a un microprocesador. Difieren uno del otro en muchos sentidos. La primera y la más importante diferencia es su funcionalidad. Para utilizar al microprocesador en una aplicación real, se debe de conectar con componentes tales como memoria o componentes, buses de transmisión, de datos. Aunque el microprocesador se considera una máquina de computación poderosa, no está preparado para la comunicación con los dispositivos periféricos que se le conectan. Para que el microprocesador se comunique con algún periférico, se deben utilizar los circuitos especiales. Así era en el principio y esta práctica sigue vigente en la actualidad.
1.3.2. Características
procesamiento, la cantidad de memoria y los periféricos incluidos dependerán de la aplicación.
Un microcontrolador difiere de una unidad central de procesamiento normal, debido a que es más fácil convertirla en una computadora en funcionamiento, con un mínimo de circuitos integrados externos de apoyo. La idea es que el circuito integrado se coloque en el dispositivo, enganchado a la fuente de energía y de información que necesite. Un microprocesador tradicional no permite hacer esto, ya que espera que todas estas tareas sean manejadas por otros chips. Hay que agregarle los módulos de entrada y salida (puertos) y la memoria para almacenamiento de información.
Un microcontrolador típico tendrá un generador de reloj integrado y una pequeña cantidad de memoria de acceso aleatorio y/o ROM, EPROM, EEPROM, flash (figura 1-6), con lo que para hacerlo funcionar todo lo que se necesita son unos pocos programas de control y un cristal de sincronización. Los microcontroladores disponen generalmente también de una gran variedad de dispositivos de entrada/salida, como convertidor analógico digital, temporizadores y buses de interfaz serie especializados. Frecuentemente, estos dispositivos integrados pueden ser controlados por instrucciones de procesadores especializados. Los modernos microcontroladores frecuentemente incluyen un lenguaje de programación integrado, como el lenguaje de programación BASIC que se utiliza bastante con este propósito.
Figura 1-6
Desde el punto de vista lógico, singular y funcional, el microprocesador está compuesto básicamente por: varios registros, una unidad de control, una unidad aritmético-lógica, y dependiendo del procesador, puede contener una unidad en coma flotante. El microprocesador ejecuta instrucciones almacenadas como números binarios organizados secuencialmente en la memoria principal. La ejecución de las instrucciones se puede realizar en varias fases:
Escritura de los resultados en la memoria principal o en los registros. Cada una de estas fases se realiza en uno o varios ciclos de CPU, dependiendo de la estructura del procesador, y concretamente de su grado de segmentación. La duración de estos ciclos viene determinada por la frecuencia de reloj, y nunca podrá ser inferior al tiempo requerido para realizar la tarea individual.
microprocesador es un sistema abierto con el que puede construirse un computador con las características que se desee acoplándole los módulos necesarios.
1.3.3. Funciones
A la hora de escoger el microcontrolador a emplear en un diseño concreto hay que tener en cuenta multitud de factores, como la documentación y herramientas de desarrollo disponibles y su precio, la cantidad de fabricantes que lo producen y por supuesto las características del microcontrolador (tipo de memoria de programa, número de temporizadores, interrupciones, etc.).
1.3.4. Aplicación
Antes de seleccionar un microcontrolador es imprescindible analizar los requisitos de la aplicación:
Procesamiento de datos: puede ser necesario que el microcontrolador realice cálculos críticos en un tiempo limitado. En ese caso se debe asegurar de seleccionar un dispositivo suficientemente rápido para ello. Por otro lado, habrá que tener en cuenta la precisión de los datos a manejar: si no es suficiente con un microcontrolador de 8 bits, puede ser necesario acudir a microcontroladores de 16 o 32 bits. Una alternativa más barata y quizá suficiente es usar librerías para manejar los datos de alta precisión.
Entrada Salida: para determinar las necesidades de Entrada/Salida del sistema es conveniente dibujar un diagrama de bloques del mismo, de tal forma que sea sencillo identificar la cantidad y tipo de señales a controlar. Una vez realizado este análisis puede ser necesario añadir periféricos hardware externos o cambiar a otro microcontrolador más adecuado a ese sistema.
el microcontrolador esté en estado de bajo consumo pero que despierte ante la activación de una señal (una interrupción) y ejecute el programa adecuado para procesarla.
Memoria: para detectar las necesidades de memoria de nuestra aplicación se debe separarla en memoria volátil (RAM), memoria no volátil (ROM, EPROM, etc.) y memoria no volátil modificable (EEPROM). Este último tipo de memoria puede ser útil para incluir información específica de la aplicación como un número de serie o parámetros de calibración.
El tipo de memoria a emplear vendrá determinado por el volumen de ventas previsto del producto: de menor a mayor volumen será conveniente emplear EPROM, OTP y ROM. En cuanto a la cantidad de memoria necesaria puede ser imprescindible realizar una versión preliminar, y a partir de ella hacer una estimación de cuánta memoria volátil y no volátil es necesaria y si es conveniente disponer de memoria no volátil modificable.
Ancho de palabra: el criterio de diseño debe ser seleccionar el microcontrolador de menor ancho de palabra que satisfaga los requerimientos de la aplicación. Usar un microcontrolador de 4 bits supondrá una reducción importante en los costos, mientras que uno de 8 bits puede ser el más adecuado si el ancho de los datos es de un byte. Los microcontroladores de 16 y 32 bits, debido a su elevado coste, deben reservarse para aplicaciones que requieran sus altas prestaciones (Entrada/Salida potente o espacio de direccionamiento muy elevado).
1.3.5. Arquitecturas
1.4. Procesamiento de señales analógicas
Un Procesamiento analógico de señales (del inglés Analog signal processing), es cualquier procesamiento de la señal llevado a cabo sobre una señal analógica por "medios analógicos" (en contraposición al Procesamiento digital de señales que se hace por "medios digitales"). Una "señal analógica" indica una señal que se puede representar matemáticamente por un conjunto de valores continuos. Contrariamente a una "señal digital", que utiliza una serie de cantidades discretas para representar la señal. Los valores analógicos representan típicamente un voltaje, una corriente eléctrica, o una carga eléctrica en torno a los componentes de los dispositivos electrónicos. Un error o ruido que afecte estas magnitudes físicas se traducirá en el error correspondiente en la representación eléctrica de dichas magnitudes físicas.
Los ejemplos de "procesamiento analógico de señales" incluyen: el filtro pasa banda, filtro pasa bajos entre otros filtros de señales para baja frecuencia y radio frecuencia, los controles de "volumen", "graves" y "agudos" en equipos de música, y los controles de "contraste" y "brillo " los televisores. El "procesamiento analógico de la señal" incluye elementos comunes como capacitores, resistencias, inductores, transistores o circuitos integrados.
1.5. Procesamiento digital de señales
El procesamiento digital de señales (PDS) o DSP (sigla en inglés de digital signal
processing) es la manipulación matemática de una señal de información para
modificarla o mejorarla en algún sentido. Este, está caracterizado por la representación en el dominio del tiempo discreto, en el dominio de la frecuencia discreta, u otro dominio discreto de señales por medio de una secuencia de números o símbolos y el procesado de esas señales.
Esto se puede conseguir mediante un sistema basado en un procesador o microprocesador que posee un juego de instrucciones, junto con circuitos (multiplicador
aritméticas a muy alta velocidad. Debido a esto es especialmente útil para el procesado de señales digitales en tiempo real. En un sistema que trabaje de esta forma (tiempo real) se reciben muestras (samples, en inglés), normalmente provenientes de un conversor analógico/digital (ADC). Se puede trabajar con señales analógicas, pero es un sistema digital, por lo tanto necesitará un conversor analógico/digital a su entrada y digital/analógico en la salida. Como todo sistema basado en procesador programable necesita una memoria donde almacenar los datos con los que trabajará y el programa que ejecuta.
Se puede procesar una señal para obtener una disminución del nivel de ruido, para mejorar la presencia de determinados matices, como los graves o los agudos y se realiza combinando los valores de la señal para generar otros nuevos. Así, el PDS se utiliza en el procesamiento de música (por ejemplo MP3), de voz (por ejemplo, reconocimiento de voz) en teléfonos celulares, de imágenes (en la transmisión de imágenes satelitales) y vídeo (DVD).
1.5.1. Muestreo
El muestreo es una de las partes del proceso de digitalización de las señales. Consiste en tomar muestras de una señal analógica a una frecuencia o tasa de muestreo constante, para cuantificarlas posteriormente. Basado en el teorema de muestreo, es la base de la representación discreta de una señal continua en banda limitada.
1.5.2. Teorema de Nyquist
Se considera una señal arbitraria de energía finita como la que se muestra en la
ecuación 1. Supóngase que se muestrea la señal de forma instantánea a una tasa
Como resultado de este proceso se obtiene una secuencia de números espaciados y
se puede denotar mediante , donde n puede tomar cualquier valor entero, es
el periodo de muestreo y fs = 1/ es la frecuencia de muestreo. Esta forma ideal de
muestreo recibe el nombre de muestreo instantáneo. Sea la señal obtenida
multiplicando la secuencia de números por un tren de deltas espaciados ,
entonces se puede expresar según la ecuación (1).
(1)
A se la denomina señal muestreada ideal. En la Figura 1-8 se puede ver el
resultado de este tipo de muestreo aplicado a la señal de la Figura 1-7. De forma equivalente se puede expresar como el producto de la señal original por la
función de muestreo ideal con periodo según la ecuación (2).
[image:23.595.158.465.462.750.2](2)
Figura 1-8. La señal de la figura 1 muestreada idealmente.
El teorema del muestreo trata, que no debe ser confundido o asociado con la cuantificación, proceso que sigue al de muestreo en la digitalización de una señal y que, al contrario del muestreo, no es reversible (se produce una pérdida de información en el proceso de cuantificación, incluso en el caso ideal teórico, que se traduce en una distorsión conocida como error o ruido de cuantificación y que establece un límite teórico superior a la relación señal-ruido). Dicho de otro modo, desde el punto de vista del teorema, las muestras discretas de una señal son valores exactos que aún no han sufrido redondeo o truncamiento alguno sobre una precisión determinada, es decir, aún no han sido cuantificadas.
El teorema demuestra que la reconstrucción exacta de una señal periódica continua en banda base a partir de sus muestras, es matemáticamente posible si la señal está limitada en banda y la tasa de muestreo es superior al doble de su ancho de banda.
de muestreo. No hay nada, por tanto, de la evolución de la señal entre muestras que no esté perfectamente definido por la serie total de muestras.
1.5.3. Frecuencia de muestreo
[image:25.595.186.396.305.530.2]La tasa o frecuencia de muestreo es el número de muestras por unidad de tiempo que se toman de una señal continua para producir una señal discreta (figura 1-9), durante el proceso necesario para convertirla de analógica en digital.
Figura 1-9 Señal original y muestreo de la misma.
La tasa o frecuencia de muestreo es el número de muestras por unidad de tiempo que se toman de una señal continua para producir una señal discreta, durante el proceso necesario para convertirla de analógica en digital.
1.5.4. Cuantificación
Uno de los pasos que se debe de tomar para convertir una señal analógica en digital es la cuantificación. Esta se encarga de medir individualmente el nivel del voltaje o tensión de todas las muestras de amplitud continua obtenidas en el proceso de muestreo.
A cada una de las muestras se le concede un margen de valor discreto (infinito) de amplitud, preestablecido según el código utilizado. En este proceso es que la señal analógica se convierte en una señal digital; o sea, desde que a las muestras se le asignan un valor finito o discreto. Ahora bien, a pesar de haber realizado la conversión, aun no se ha traducido a un sistema binario, ya que esta traducción lo realiza el siguiente proceso que es la codificación; el cual recibe los valores finitos y los transforma en una sucesión de ceros y unos. En el proceso de decodificación digital tiende a aparecer errores de cuantificación, los cuales producen un fuerte ruido.
Este error se produce cuando el valor real de la muestra no es el mismo que el de los escalones disponibles para su aproximación, y la distancia del valor real es mucho más grande que la distancia que se toma. Estos errores se pueden minimizar usando diferentes técnicas de cuantificación, como son; Cuantificación no uniforme o no lineal: que se utiliza cuando las señales que se procesan no son semejantes a una determinada banda de frecuencia; por consiguientes estas señales son mucho más sensibles. En este caso se asigna niveles de cuantificación de forma no uniforme, para que se establezca un número mayor de niveles a los márgenes donde la amplitud de la tensión cambia más rápido.
En el siguiente proceso (la descodificación), se debe de utilizar el mismo circuito no lineal que se utilizó en la cuantificación no uniforme; de este modo se podrá recomponer la señal más rápidamente.
en la muestra adyacente. Este tipo de cuantificador es el menos recomendado de todos, ya que la probabilidad del ruido es proporcional al incremento de la amplitud de la señal.
Cuantificación vectorial: es parecido a la cuantificación uniforme o no constante, ya que utiliza un bit constante o variable. Este cuantificador en vez de cuantificar las muestras retenidas de forma individual, las cuantifica en bloques de muestras. Cada uno de estos bloques es cuantificado como si fuera un solo vector.
Cuantificación logarítmica: en este proceso se usa una tasa de datos constante, y se hace pasar la señal analógica por un compresor logarítmico antes de producir la señal digital.
1.6. Óptica
1.6.1. Espejos
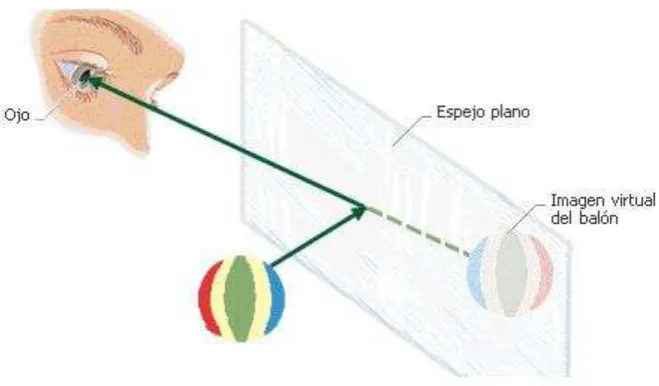
[image:27.595.225.387.568.656.2]Un espejo es una superficie pulida en la que al incidir la luz, se refleja siguiendo las leyes de la reflexión.
Figura 1-10. Reflexión de los rayos de luz en un espejo plano.
virtual de un objeto con el mismo tamaño y forma que el real. La imagen resulta derecha pero invertida en el eje normal al espejo.
Figura 1-11. Esquema de un reflector.
También hay espejos curvos que pueden ser cóncavos o convexos (figura 1-11). En un espejo cóncavo cuya superficie forma un paraboloide de revolución, todos los rayos que inciden paralelos al eje del espejo, se reflejan pasando por el foco, y los que inciden pasando por el foco, se reflejan paralelos al eje los espejos son objetos que reflejan casi toda la luz que choca contra su superficie.
Los espejos modernos consisten de una delgada capa de plata o aluminio depositado sobre una plancha de vidrio, la cual protege el metal y hace al espejo más duradero, ver plateado.
Para una imagen formada por un espejo parabólico (o esférico de pequeña abertura, donde sea válida la aproximación paraxial) se cumple que:
Ecuación (3)
En la que f es la distancia del foco al espejo, s la distancia del objeto al espejo y s' la distancia de la imagen formada al espejo, se lee: «La inversa de la distancia focal es igual a la suma de la inversa de la distancia del objeto al espejo con la inversa de la distancia de la imagen al espejo».
Y en la que m es la magnificación o agrandamiento lateral.
1.6.1.1. Espejos Convexos
Se produce una situación en la que la imagen es virtual, derecha y más pequeña que elementos de un espejo centro de curvatura: es el centro de la esfera imaginaria que constituye el espejo eje óptico: es la recta horizontal que pasa por el centro de curvatura.
Foco: es el punto del eje óptico por el que pasan reflejados los rayos paralelos. Está situado en el punto medio de la línea que une el centro con el espejo.
[image:29.595.225.388.432.558.2]1.6.1.2. Espejo retrovisor
Figura 1-12. Espejo retrovisor muestra los vehículos en su parte TRASERA.
Un espejo retrovisor (Figura 1-11) es un tipo funcional de espejo que poseen los automóviles y otros vehículos, que están diseñados para permitirle al conductor ver el área que se encuentra detrás del vehículo a través de la ventana posterior.
apropiada su campo de visión. En cambio el espejo lateral del lado del acompañante se encuentra ubicado lo suficientemente lejos como para que el campo visual sea fijo, por más que el conductor mueva su cabeza y por lo tanto un espejo convexo es deseable para expandir el campo visual.
En su configuración típica, el espejo retrovisor se encuentra fijo a la parte superior del parabrisas en un montaje universal que permite que pueda ser rotado. Algunos modelos de vehículos poseen el espejo retrovisor montado en la parte superior del tablero. Para ajustar la posición del espejo se recomienda sentarse en el asiento del conductor en la misma posición que se utiliza para conducir. La utilidad de los espejos puede verse disminuida en vehículos que poseen grandes spoilers o ventanas posteriores de dimensiones reducidas, obstrucciones en el asiento trasero o arrastran un remolque. Los espejos retrovisores interiores están diseñados para desprenderse fácilmente durante un choque de manera de minimizar el daño a un ocupante del vehículo que fuera desplazado y golpeara contra el espejo
[image:30.595.142.472.468.661.2]1.6.2. Reflexión y Refracción
Figura 1-13 Reflexión en un espejo plano
ambos medios. El plano de incidencia se define como el plano formado por el rayo incidente y la normal (es decir, la línea perpendicular a la superficie del medio) en el punto de incidencia (figura 1-14). El ángulo de incidencia es el ángulo entre el rayo incidente y la normal. Los ángulos de reflexión y refracción se definen de modo análogo.
Las leyes de la reflexión afirman que el ángulo de incidencia es igual al ángulo de reflexión, y que el rayo incidente, el rayo reflejado y la normal en el punto de incidencia se encuentran en un mismo plano.
Recordado que la velocidad de la luz en el vacío es por definición una constante universal de valor 299.792.458 m/s.
1.6.2.1. Ley de Snell
Esta importante ley, llamada así en honor del matemático holandés Willebrord van Roijen Snell, afirma que el producto del índice de refracción del primer medio y el seno del ángulo de incidencia de un rayo es igual al producto del índice de refracción del segundo medio y el seno del ángulo de refracción. El rayo incidente, el rayo refractado y la normal a la superficie de separación de los medios en el punto de incidencia están en un mismo plano. En general, el índice de refracción de una sustancia transparente más densa es mayor que el de un material menos denso, es decir, la velocidad de la luz es menor en la sustancia de mayor densidad. Por tanto, si un rayo incide de forma oblicua sobre un medio con un índice de refracción mayor, se desviará hacia la normal, mientras que si incide sobre un medio con un índice de refracción menor, se desviará alejándose de ella. Los rayos que inciden en la dirección de la normal son reflejados y refractados en esa misma dirección.
que está en realidad. Un ejemplo habitual es el de un objeto sumergido, observado desde encima del agua, como se muestra en la figura 1-16 (sólo se representan rayos oblicuos para ilustrar el fenómeno con más claridad). El rayo DB procedente del punto D del objeto se desvía alejándose de la normal, hacia el punto A. Por ello, el objeto parece situado en C, donde la línea ABC intercepta una línea perpendicular a la superficie del agua y que pasa por D.
1.6.2.2. Ángulo crítico
La fibra óptica es una nueva aplicación práctica de la reflexión total. Cuando la luz entra por un extremo de un tubo macizo de vidrio o plástico, puede verse reflejada totalmente en la superficie exterior del tubo y, después de una serie de reflexiones totales sucesivas, salir por el otro extremo. Es posible fabricar fibras de vidrio de diámetro muy pequeño, recubrirlas con un material de índice de refracción menor y juntarlas en haces flexibles o placas rígidas que se utilizan para transmitir imágenes. Los haces flexibles, que pueden emplearse para iluminar además de para transmitir imágenes, son muy útiles para la exploración médica, ya que pueden introducirse en cavidades estrechas e incluso en vasos sanguíneos.
1.6.3. Visión humana
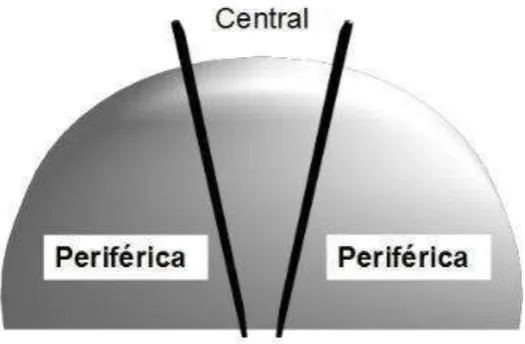
1.6.3.1. Visión periférica y central
En el fondo del ojo hay una membrana denominada retina, la cual es sensible al estímulo luminoso. La misma está compuesta de una capa delgada de tejido nervioso, en la cual hay dos tipos de fibras nerviosas en forma de células sensitivas a la luz, denominadas conos y bastones. La concentración de los conos y bastones varía sobre el área de la retina. Una pequeña depresión en el centro de la retina, de un diámetro alrededor de 0,5 mm, contiene sólo conos (la fovea). Fuera de dicha área libre de bastones, los bastones y conos están mezclados, la proporción de los conos disminuye en el área periférica de la retina.
VISIÓN CENTRAL: Los conos en la fovea producen una imagen nítida, permitiendo ver todos los detalles de la misma.
Figura 1-20
1.6.3.2. Visión de los colores
Los conos nos permiten distinguir los colores. Existen tres tipos de conos, con pigmentos sensitivos a las partes rojas, verdes y azules del espectro. La mente interpreta la estimulación relativa de los tres receptores de color como la impresión de color.
1.6.3.3. Sensibilidad espectral del ojo
1.6.3.4. Adaptación
Proceso de modificación de las propiedades del órgano de la visión según los niveles de iluminancias (lux).
1.6.3.5. Acomodación
Modificación de los elementos ópticos del ojo de acuerdo con la distancia de los objetos observados.
1.6.3.6. Contraste
El factor dominante en la discriminación de un objeto es la diferencia en iluminancia o color entre el objeto observado y su alrededor inmediato. Subjetivamente, contraste es la evaluación de la diferencia en apariencia de dos partes de un campo de visión vistos simultánea o sucesivamente. En el sentido objetivo, contraste se define como la relación entre la luminancia del objeto y del fondo.
1.6.3.7. Agudeza Visual
1.6.3.8. Velocidad de Recepción
La velocidad de percepción depende del nivel de luminancia. Se puede definir como la inversa del intervalo de tiempo entre la presentación de un objeto y la percepción de su forma. Correspondientemente, la velocidad de la percepción de contraste es la inversa del intervalo de tiempo entre el instante en el cual se presenta el contraste y el instante en el cual se percibe.
1.7. Onda mecánica
Una onda mecánica es una perturbación de las propiedades mecánicas de un medio material (posición, velocidad y energía de sus átomos o moléculas) que se propaga en el medio.
Todas las ondas mecánicas requieren:
Alguna fuente que cree la perturbación.
Un medio en el que se propague la perturbación.
Algún medio físico a través del cual elementos del medio puedan influir uno al otro.
1.7.1. En función de su propagación o frente de onda
Propagación de una onda por presión dentro de un émbolo.
Ondas unidimensionales: las ondas unidimensionales son aquellas que se propagan a lo largo de una sola dirección del espacio, como las ondas en los muelles o en las cuerdas. Si la onda se propaga en una dirección única, sus frentes de onda son planos y paralelos.
Ondas bidimensionales o superficiales: son ondas que se propagan en dos direcciones. Pueden propagarse, en cualquiera de las direcciones de una superficie, por ello, se denominan también ondas superficiales. Un ejemplo son las ondas que se producen en la superficie de un lago cuando se deja caer una piedra sobre él.
Ondas tridimensionales o esféricas: son ondas que se propagan en tres direcciones. Las ondas tridimensionales se conocen también como ondas esféricas, porque sus frentes de ondas son esferas concéntricas que salen de la fuente de perturbación expandiéndose en todas direcciones. El sonido es una onda tridimensional. Son ondas tridimensionales las ondas sonoras (mecánicas) y las ondas electromagnéticas.
1.7.2. En función de la dirección de la perturbación
Ondas transversales: las partículas se mueven perpendicularmente a la dirección de propagación de la onda (Ver figura 1-20).
Figura 1-21. Representación gráfica de Ondas Longitudinales y Ondas Transversales
1.7.3. En función de su periodicidad
Ondas periódicas: la perturbación local que las origina se produce en ciclos repetitivos, por ejemplo una onda senoidal.
Ondas no periódicas: la perturbación que las origina se da aisladamente o en el caso de que se repita, las perturbaciones sucesivas tienen características diferentes. Las ondas aisladas se denominan también pulsos.
1.7.4. Frecuencia
Para calcular la frecuencia de un suceso. Según el SI (Sistema Internacional), la frecuencia se mide en Hertz (Hz). La frecuencia de oscilación de una partícula (o de cualquier magnitud, por ejemplo el voltaje de una señal eléctrica) es la cantidad de ciclos completos en un tiempo, e indica el número de ciclos completos en un segundo. Un ciclo es el recorrido completo que efectúa una partícula desde su posición central, hasta llegar otra vez a esa misma posición, habiendo pasado por su posición de desplazamiento máximo y mínimo.
1 Hz = 1 vuelta o revolución/segundo
Un método alternativo para calcular la frecuencia es medir el tiempo entre dos repeticiones (periodo) y luego calcular la frecuencia (f) recíproca de esta manera:
Frecuencia = 1/ periodo de la señal
1.7.5. Ultrasonido
El termino ultrasonido se refiere a las ondas o vibraciones sonoras que tienen una frecuencia que está por encima de la capacidad auditiva del oído humano, por arriba de los 20,000 Hz Esta energía se propaga en forma de ondas de compresión longitudinal y necesita de un medio elástico para ser transmitido.
1.7.6. Velocidad de propagación del sonido
aire) es directamente proporcional a su temperatura específica y a su presión estática e inversamente proporcional a su densidad. Dado que si varía la presión, varía también la densidad del gas, la velocidad de propagación permanece constante ante los cambios de presión o densidad del medio.
Pero la velocidad del sonido sí varía ante los cambios de temperatura del aire (medio); Cuanto mayor es la temperatura del aire mayor es la velocidad de propagación, la velocidad del sonido en el aire aumenta 0,6 m/s por cada 1º C de aumento en la temperatura.
La velocidad del sonido en el aire es de aproximadamente 344 m/s a 20º C de temperatura, lo que equivale a unos 1.200 km/h (1.238,4 km/h, para ser precisos). Es decir que necesita unos 3 s para recorrer 1 km
1.7.1. Longitud de onda
La longitud de una onda es el período espacial de la misma, es decir, la distancia a la que se repite la forma de la onda. Normalmente se consideran dos puntos consecutivos que poseen la misma fase: dos máximos, dos mínimos, dos cruces por cero (en el mismo sentido). Por ejemplo, la distancia recorrida por la luz azul (que viaja a 299.792.458 m/s) durante el tiempo transcurrido entre dos máximos consecutivos de su campo eléctrico (o magnético) es la longitud de onda de esa luz azul. La luz roja viaja a la misma velocidad, pero su campo eléctrico aumenta y disminuye más lentamente que el de la luz azul. Por tanto, la luz roja avanzará más distancia que la luz azul en el mismo tiempo. Por eso la longitud de onda de la luz roja es mayor que la longitud de onda de la luz azul. Si se representa esa propiedad (el campo eléctrico en el ejemplo mencionado) en una gráfica entonces se puede decir que la longitud de onda se representa en esa misma gráfica como la distancia entre dos máximos consecutivos.
partículas o el medio que propaga la onda, como en el caso de las olas del mar, en las que la onda avanza horizontalmente y las partículas se mueven verticalmente) (figura 1-22).
Figura 1-22
MATLAB es un lenguaje de alto desempeño diseñado para realizar cálculos técnicos. Que integra el cálculo, la visualización y la programación en un ambiente fácil de utilizar donde los problemas y las soluciones se expresan en una notación matemática. MATLAB es un sistema interactivo cuyo elemento básico de datos es el arreglo que no requiere de dimensionamiento previo. Esto permite resolver muchos problemas computacionales, específicamente aquellos que involucren vectores y matrices, en un tiempo mucho menor al requerido para escribir un programa en un lenguaje escalar no interactivo tal como C o Fortran.
MATLAB se utiliza ampliamente en:
Cálculos numéricos.
Desarrollo de algoritmos.
Modelado, simulación y prueba de prototipos.
Análisis de datos, exploración y visualización.
Realización de gráficos de datos con fines científicos o de ingeniería.
Desarrollo de aplicaciones que requieran de una interfaz gráfica de usuario (GUI,
Graphical User Interface).
1.8.1. MATLAB aplicado a la Ingeniería
En los últimos años, en el mundo de la ingeniería el tiempo de desarrollo e investigación se ha reducido debido a que los científicos e ingenieros no tienen que programar sus herramientas de diseño. Hoy en día, es posible contar con paquetes de programa que contienen una gran cantidad de funciones y aplicaciones que se intercomunican a través de un lenguaje de programación matricial. Un ejemplo de este tipo de aplicaciones es MATLAB, que es considerado una herramienta esencial en el mundo de la ingeniería.
2. DETECCION DE PUNTOS CIEGOS
2.1. Planteamiento del problema
En México y en el mundo, los puntos ciegos son un gran problema debido a que, involucran casi el 20% de los accidentes (aproximadamente 54,800 accidentes al año), de los cuales muchos de estos terminan en tragedia. Y en mayor parte de estos accidentes, las personas más afectadas, ni siquiera son los causantes.
2.2. Puntos ciegos
Los conductores que van aislados en el interior de su vehículo, deben saber que a los lados y por detrás existen puntos ciegos (Figura 2-1). Es una forma de referirse a aquellas zonas que, a pesar de que se utilicen los retrovisores laterales y el retrovisor, no es posible ver toda el área alrededor del vehículo. Muchas veces se infravalora la dimensión de la superficie afectada por los puntos ciegos, pero puede llegar a constituir el 38% de todo el vehículo.
Figura 2-1-2 representación de puntos ciegos en transporte pesado
La visión reducida del panorama es causada en gran parte por el diseño y altura de las cabinas del conductor.
Generalmente en el transporte pesado, en las SUV, pick up o minivan; Las puertas y asientos son muy altos, como consecuencia las camionetas tienden a elevar su altura, lo que significa que niños pequeños y adultos de baja estatura pueden ser atropellados cuando el auto está aparcando, se mueve hacia atrás o al doblar en una esquina. Debido a que el conductor no alcanza a verlos por el espejo retrovisor o los espejos laterales.
2.3. Solución
2.4. Diagrama a bloques del sistema
Este dispositivo se propone que esté formado por el siguiente diagrama a bloques:
TX: envía los pulsos de ultrasonido
RX: recibe los pulsos enviados por el TX
Amplificador: amplifica la señal del TX y del RX
Oscilador: da la referencia de tiempo para los pulsos
Comparador: compara la señal transmitida con la que se recibió
ADC: convierte la señal de analógica a digital
LM35: sensor de temperatura ambiente
Puerto COM: puerto de comunicación entre el dispositivo y la computadora
Led rojo: señal visual de peligro
2.5. Instalación
Externa
La instalación tiene que ser sencilla se colocaría en un gabinete de acrílico (para evitar contacto directo con el agua y o residuos en el camino), este gabinete puede estar colocado debajo del vehículo, sobre el toldo (o techo) del vehículo, o más profesionalmente, realizar en la carrocería un corte para instalarlo a un lado del vehículo (figura 2-2) (únicamente calibrándolo manualmente, es decir, moviendo el sensor de modo a que cubra el punto ciego del conductor).
Interna
Para una mejor visualización se pensó en colocar Led’s a un costado de los espejos
Figura 2-3. Lugar de los Led’s en un automóvil
Figura 2-4. Lugar de los Led’s en transporte pesado
2.6. Rango del dispositivo instalado
Figura 2-5. Rango de visión con sistema implementado
Con la figura 2-5. Se puede observar que los dispositivos eliminan el 100% de los puntos ciegos laterales del vehículo, esto mismo se puede implementar en los transportes pesados y automóviles grandes.
2.5
3. SISTEMA DE DETECCION
3.1. Arduino Uno
El Arduino Uno es una placa electrónica basada en el microprocesador Atmega328. Tiene 14 pines digitales de entrada / salida (de las cuales 6 se puede utilizar como salidas PWM), 6 entradas analógicas, un 16 MHz resonador cerámico, una conexión USB, un conector de alimentación, una cabecera ICSP (In Circuit Serial Programming),
y un botón de reinicio. Contiene todo lo necesario para apoyar el microcontrolador, basta con conectarlo a un ordenador con un cable USB o el poder con un adaptador AC-DC o batería.
3.1.1. Resumen
Microcontroladores ATmega328
Voltaje de funcionamiento 5V
Voltaje de entrada (recomendado) 7-12V
Voltaje de entrada (límites) 6-20V
Pines E / S digitales 14 (de los cuales 6 proporcionan PWM)
Pines de entrada analógica 6
DC Corriente por I / O Pin 40 mA
Corriente CC para Pin 3.3V 50 mA
Memoria Flash 32 KB (ATmega328) de los cuales 0,5 KB utilizado por gestor de arranque
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Velocidad del reloj 16 MHz
3.1.2. Potencia
El Arduino Uno puede ser alimentado a través de la conexión USB o con una fuente de alimentación externa. La fuente de alimentación se selecciona automáticamente.
(No USB) Fuente de alimentación externa puede venir con un adaptador de AC-DC (pared-verruga) o la batería. El adaptador se puede conectar al conectar un enchufe de 2,1 mm de centro positivo en el conector de alimentación de la placa. Cables de la batería se pueden insertar en los cabezales de pin GND y Vin del conector de alimentación.
cinco voltios y la junta puede ser inestable. Si se utiliza más de 12V, el regulador de voltaje se puede sobrecalentar y dañar la placa. El rango recomendado es de 7 a 12 voltios.
Los pines de alimentación son como sigue:
VIN. El voltaje de entrada a la placa Arduino cuando se trata de utilizar una fuente de alimentación externa (en lugar de 5 voltios de la conexión USB u otra fuente de alimentación regulada). Puede suministrar tensión a través de este pin, o, si el suministro de tensión a través de la toma de alimentación, el acceso a través de este pin.
5V. Este pin como salida una 5V regulada desde el regulador en el tablero. El tablero puede ser alimentado ya sea desde la toma de la corriente continua (7 - 12), el conector USB (5V) o el pasador de VIN del tablero (7-12V). El suministro de tensión a través de los 5V o 3.3V no pasa por el regulador, y puede dañar la placa.
3V3. Un suministro de 3,3 voltios generados por el regulador a bordo. El drenaje
actual máximo es de 50 mA.
GND. Patillas de tierra.
IOREF. Este pin de la placa Arduino proporciona la referencia de tensión con la que opera el microcontrolador. Un escudo configurado puede leer el voltaje pin IOREF y seleccione la fuente de alimentación adecuada o habilitar traductores voltaje en las salidas para trabajar con los 5V o 3.3V.
3.1.3. Memoria
El ATmega328 tiene 32 KB (con 0,5 KB utilizado por el gestor de arranque). También dispone de 2 KB de SRAM y 1 KB de EEPROM.
3.1.4. Entrada y salida
Cada uno de los 14 pines digitales en el Uno se puede utilizar como una entrada o salida, usando pinMode () , digitalWrite () , y digitalRead () funciones. Ellos funcionan a 5 voltios. Cada pin puede proporcionar o recibir un máximo de 40 mA y tiene una resistencia pull-up interna (desconectada por defecto) de 20 a 50 kOhm. Además, algunos pines tienen funciones especializadas:
Serie: 0 (RX) y 1 (TX) Se utiliza para recibir (RX) y transmitir (TX) datos serie TTL. Estos pasadores están conectados a las clavijas correspondientes de la ATmega8U2 de USB a TTL chip de serie.
Interrupciones externas:. 2 y 3 Estos pines pueden ser configurados para activar una interrupción en un valor bajo, un flanco ascendente o descendente, o un cambio en el valor.
PWM: 3, 5, 6, 9, 10, 11 y proporcionar una salida de PWM de 8 bits.
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) Estos pines apoyo a la comunicación SPI.
LED: 13 Hay un built-in LED conectado al pin digital 13. Cuando el pin es un valor alto, el LED está encendido, cuando el pasador es bajo, es apagado.
El Uno tiene 6 entradas analógicas, etiquetados A0 a A5, cada uno de los cuales proporcionan 10 bits de resolución (es decir, 1.024 valores diferentes). Por defecto se miden desde el suelo a 5 voltios, aunque es posible cambiar el extremo superior de su rango con el pin AREF y la analogReference function (). Además, algunos pines tienen funciones especializadas:
TWI: A4 o A5 y el pin SDA y SCL pin Support comunicación TWI mediante.
librería Wire .
Hay un par de pines de la placa:
Restablecer. Lleve esta línea LOW para reiniciar el microcontrolador. Normalmente se utiliza para agregar un botón de reinicio para escudos que bloquean la que está en el tablero.
ADC. Lee el valor de tensión en el pin analógico especificado. La placa Arduino posee 6 canales (8 canales en el Mini y Nano y 16 en el Mega) conectados a un conversor analógico digital de 10 bits. Esto significa que convertirá tensiones entre 0 y 5 voltios a un número entero entre 0 y 1023. Esto proporciona una resolución en la lectura de: 5 voltios / 1024 unidades, es decir, 0.0049 voltios (4.9 mV) por unidad. El rango de entrada puede ser cambiado usando la función analogReference().
El conversor tarda aproximadamente 100 microsegundos (0.0001 segundos) en leer una entrada analógica por lo que se puede llevar una tasa de lectura máxima aproximada de 10.000 lecturas por segundo.
3.1.5. Comunicación
El Arduino Uno tiene un número de instalaciones para la comunicación con un ordenador, otro Arduino, u otros microcontroladores. El firmware '16U2 utiliza los controladores de COM USB estándar, y no se necesita ningún controlador externo. Sin embargo, en Windows, se requiere un archivo. inf . El programa de Arduino incluye un monitor de puerto serie que permite a los datos de texto simples para ser enviados hacia y desde la placa Arduino. Los LEDs RX y TX de la placa parpadearán cuando los datos se transmiten a través del chip USB a serie y la conexión USB al ordenador (pero no para la comunicación en serie en los pines 0 y 1).
3.1.6. Programación
El Arduino Uno se puede programar con el programa de Arduino. Seleccione "Arduino Uno desde el menú Herramientas>.
El ATmega328 en la Arduino Uno viene con un cargador de arranque que le permite cargar nuevo código a la misma sin el uso de un programador de hardware externo. Se comunica utilizando el protocolo STK500 original.
También puede pasar por alto el gestor de arranque y el programa del microcontrolador a través del ICSP (programación en circuito serie) cabecea.
3.1.7. Características físicas
La longitud y la anchura de la PCB Uno máximo son 2,7 y 2,1 pulgadas, respectivamente, con el conector USB y el conector de alimentación que se extiende más allá de la dimensión anterior. Cuatro orificios de los tornillos que la Junta pueda fijarse a una superficie o caja. Tenga en cuenta que la distancia entre los pines digitales 7 y 8 es de 160 milésimas de pulgada (0,16 "), no es un múltiplo par del milésimas de pulgada espaciamiento de los otros pernos 100.
3.1.8. Temporizador
alcance. Si el sistema no se reinicia el contador tiene lugar un retorno de interrupción o del sistema se emitirá.
3.1.9. Uso del Arduino
De acuerdo al diagrama a bloques la función del microcoontrolador la tomará la placa del Arduino, debido a que es económico, es un software libre, es de fácil programación y multiplataforma.
3.2. Código fuente para el micro controlador
3.2.1. Diagrama de flujo del programa
El Código fuente fue realizado con el programa en Arduino (figura 3-1), se menciona a continuación.
//Se definen los Puertos que utilizara el Arduino para el trig el echo y los led’s
#define trigPin 13 #define echoPin 8
#define ledr 7 // salida de Led rojo #define ledv 5 // salida del Led verde void setup()
{
Serial.begin (9600);//para habilitar puerto serial pinMode(trigPino, OUTPUT); pinMomde(echoPin, INPUT); pinMode(ledr, OUTPUT); pinMode(ledv, OUTPUT); } void loop() {
long duration, distance; digitalWrite(trigPin, LOW);
delayMicroseconds(5); //tiempo de encendido del disparador digitalWrite(trigPin, HIGH);
delayMicroseconds(5); //tiempo de apagado del disparador digitalWrite(trigPin, LOW);
duracion = pulseIn(echoPin, HIGH);
distancia = (duracion/2) / 29.1; //cálculo de la distancia if (distancia < 300) { // Distancia de proximidad
digitalWrite(ledr,HIGH);
digitalWrite(ledv,LOW); //condiciones para encender leds }
else
{
}
if (distancia >= 450 || distancia <= 0) //imprimir distancia
{
Serial.println("Fuera de rango");
}
else
{
Serial.print(distancia); Serial.println(" cm");
}
Este programa compara el tiempo que tarda en salir la señal y en regresar para calcular
[image:64.595.71.539.202.497.2]la distancia, contiene condiciones para encender led’s que advierten de la proximidad de un objeto y envía información a través de un puerto USB (figura 3-2).
3.3. Indicador Visual
Para el indicador visual se optó por la opción de usar dos Led’s, uno de color rojo y otro verde, esto porque se está acostumbrado a que el color rojo indica peligro o detenerse y el color verde indica zona libre.
3.3.1. Diodo emisor de luz
Un diodo es un componente electrónico a través del cual la corriente pasa en un solo sentido. Los diodos emisores de luz (LED, acrónimo de Light-Emitting Diode) son semiconductores que generan luz al pasar una corriente a través de ellos. Se emplean en numerosos dispositivos comunes, como el sintonizador de un aparato de radio. Una disposición de siete LED en forma de ocho puede utilizarse para presentar cualquier número del 0 al 9. Esta disposición suele emplearse en calculadoras y relojes digitales.
3.4. Funcionamiento del detector
Esto último resulta más fácil de visualizarse en el siguiente diagrama:
Figura 3-3
3.5. Medición de temperatura
3.5.1. LM35
El LM35 es un sensor de temperatura integrado de precisión, cuya tensión de salida es linealmente proporcional a temperatura en ºC (grados centígrados). El LM35 por lo tanto tiene una ventaja sobre los sensores de temperatura lineal calibrada en grados Kelvin: que el usuario no está obligado a restar una gran tensión constante para obtener grados centígrados. El LM35 no requiere ninguna calibración externa o ajuste para proporcionar una precisión típica de ± 1.4 ºC a temperatura ambiente y ± 3.4 ºC a lo largo de su rango de temperatura (de -55 a 150 ºC). El dispositivo se ajusta y calibra durante el proceso de producción. La baja impedancia de salida, la salida lineal y la precisa calibración inherente, permiten la creación de circuitos de lectura o control especialmente sencillos. El LM35 puede funcionar con alimentación simple o alimentación doble (+ y -)
temperaturas que abarca desde los- 55 ºC bajo cero a 150 ºC, mientras que el LM35C está preparado para trabajar entre -40 ºC y 110 ºC (con mayor precisión).
3.5.2. Características
•Calibrado directamente en grados Celsius (Centígrados)
•Factor de escala lineal de +10 mV / ºC •0,5ºC de precisión a +25 ºC
•Rango de trabajo: -55 ºC a +150 ºC
•Apropiado para aplicaciones remotas •Bajo coste
•Funciona con alimentaciones entre 4V y 30V •Menos de 60 µA de consumo
•Bajo auto-calentamiento (0,08 ºC en aire estático)
•Baja impedancia de salida, 0,1W para cargas de 1mA
3.5.3. Aplicación
Debido a que el sistema funciona mediante la detección de objetos por medio de la propagación de ondas ultrasónicas es necesario tomar en cuenta que la temperatura en el ambiente (espacio), influye directamente en la velocidad de propagación de la onda ultrasónica, por ello para que exista mayor veracidad en el tratamiento de la información, se propone futuramente utilizar sensores de temperatura, los cuales estarán censando cual es la temperatura existente en todo momento en que se esté utilizando el sistema.
La velocidad del sonido en el aire aumenta 0,6 m/s por cada 1º C de aumento en la temperatura.
Donde es la temperatura en grados Celsius
En la siguiente tabla (Figura 3-3) se presenta la relación entre la velocidad de propagación respecto a la temperatura ºC
temperatura °C velocidad del sonido m/s
0 331.4
1 332.01
2 332.62
3 333.22
4 333.84
5 334.45
6 335.06
7 335.66
8 336.28
9 336.89
10 337.5
11 338.1
12 338.71
13 339.33
14 339.94
15 340.54
16 341.15
17 341.77
18 342.38
19 342.98
20 343.59
21 344.21
22 344.82
23 345.42
24 346.03
25 346.65
26 347.26
27 347.87
28 348.47
29 349.09
30 349.7
31 350.31
33 351.53
34 352.14
35 352.75
36 353.35
37 353.96
38 354.58
39 355.19
40 355.79
41 356.4
42 357.02
43 357.63
44 358.23
45 358.84
46 359.46
47 360.07
48 360.67
49 361.28
50 361.9
Figura 3-4
3.5.4. Observación
Este dispositivo no se pudo implementar en este proyecto por falta de tiempo, pero sería muy buena opción continuar este proyecto implementando el sensor de temperatura.
4. IMPLEMENTACIÓN Y PRUEBAS
4.1. Prototipo
[image:70.595.54.530.183.435.2] Elementos
Figura 4-1 Fotografía del prototipo armado y sus componentes.
En la figura 4-1 se observa los componentes del prototipo como el sensor ultrasónico HC-SR04, que es el modelo que se utilizó para la elaboración de dicho dispositivo, la
placa del Arduino Uno modelo R3 y el indicador visual, que son los dos Led’s, uno de
Microcontrolador Arduino
Figura 4-2 componentes de la placa del Arduino
En la figura 4-2, se observan los componentes de la placa del Arduino donde se tiene principalmente el microcontrolador ATMEGA 328, todos sus puertos de entrada y salida, así como su puerto de alimentación externo y el puerto USB.
4.2. Implementación de MATLAB
Se utilizó MATLAB para verificar los datos que proporciona el Arduino fuesen los correctos.
El siguiente programa se realizó con la herramienta de MATLAB (Figura 4-2), mostrado a continuación:
%Borra conexiones previas delete(instrfind({'Port'},{'COM7'})); %Crear una conexiono serie
s = serial('COM7','BaudRate',9600,'Terminator','CR/LF'); warning('off','MATLAB:serial:fscanf:unsuccessfulRead'); %Abre el puerto
fopen(s);
%Inicializar las variables
Nvalores=100; %Cantidad de valores a leer m1=zeros(1,Nvalores);
i=1;
k=0;
while k<Nvalores %Leer el puerto serie a = fscanf(s,'%f.%f')'; m1(i)=a(1);
%Dibujar la figura figure(1);
if mm1(i)<20 plot(m1,'r') %plot
elseif m1(i)<40&&m1(i)>20 plot(m1,'y') %plot
else
plot(m1,'b'); %plot end
grid on;
%Incrementar el contadoro i=i+1;
Figura 4-2-1. Captura de pantalla del editor de MATLAB con el programa mencionado
[image:73.595.65.534.476.741.2]En la gráfica 4-2-2 se observa una variación de distancias debido a que se movió rápidamente un objeto para verificar que el dispositivo fuera capaz de percibir la distancia correcta en cambios rápidos de la distancia entre el sensor y un objeto.
4.3. Cálculos de temperatura
Como se mencionó, este proyecto no tiene implementado un sensor de temperatura, por lo tanto, se realizó una tabla sin cambiar la velocidad ideal, que tendría que estar de acuerdo a los valores de la tabla del capítulo 3.4.2 (Figura 3-3), y se colocó la velocidad que toma el sonido a 20° C, y se calculó la distancia obtenida real, si se toma una distancia fija de 1.5 metros como base del experimento; Con la finalidad de encontrar cual sería el error si no se implementara el sensor de temperatura. Y se obtuvo la siguiente tabla:
Temperatura
(°C) Distancia obtenida (m)
5 1.54
6 1.54
7 1.53
8 1.53
9 1.53
10 1.53
11 1.52
12 1.52
13 1.52
14 1.51
15 1.51
16 1.51
17 1.5
18 1.5
19 1.5
20 1.5
21 1.5
22 1.5
23 1.49
24 1.49
25 1.49