1
MATEMÁTICA 2 IPA PROF: ADRIÁN MILANO
Profesorado de Física 2018
SISTEMAS LINEALES DE ECUACIONES
La solución a muchos problemas planteados en la matemática, la ingeniería, la economía y otras ciencias se obtienen a partir del conjunto solución de un sistema lineal de ecuaciones.
Seguramente en cursos anteriores ha tenido que resolver sistemas de ecuaciones similares a estos:
1)
=
+
=
+
1
3
2
y
x
y
x
, 2)
=
+
=
+
1
2
3
2
y
x
y
x
, 3)
=
+
+
=
−
+
=
+
+
0
2
1
3
2
z
y
x
z
y
x
z
y
x
y 4)
−
=
−
+
=
−
+
=
+
2
1
9
0
2
3
z
y
x
z
y
x
y
x
El objetivo es poder encontrar, en caso que exista, todas las parejas
(
x
,
y
)
de números reales (en el caso 1) y 2)) o todas las ternas(
x
,
y
,
z
)
de números reales (en el caso 3) y 4)) que verifiquen simultáneamente las ecuaciones del sistema.DEFINICIONES
Un sistema lineal
(
S
)
dem
ecuaciones conn
incógnitasx
1,
x
2,
...,
x
n es un problema que se plantea de laforma:
(
S
)
:
=
+
+
+
=
+
+
+
=
+
+
+
sistema) del ecuación ésima
-(m
sistema) del ecuación (Segunda
sistema) del ecuación (Primera
..
...
...
...
...
...
...
...
...
...
...
...
2 2 1 1
2 2
2 22 1 21
1 1
2 12 1 11
m n n m m
m
n n
n n
b
x
a
x
a
x
a
b
x
a
x
a
x
a
b
x
a
x
a
x
a
Los
a
ij yb
pson elementos conocidos, como por ejemplo, números reales o complejos. (
i
,j
yp
son números naturales tales que1
≤
i
≤
m
,1
≤
j
≤
n
y1
≤
p
≤
m
).Los
a
ij son llamados coeficientes delsistema(
S
)
y losb
p se llaman términos independientes del sistema(
S
)
. El problema que plantea un sistema de ecuaciones es el de hallar, en caso que existan, todos losx
1,
x
2,
...,
x
n (llamados incógnitas del sistema) que hacen que se verifiquen lasm
ecuaciones del sistema(
S
)
.Una solución del sistema
(
S
)
es unan
- úpla ordenada(
λ
1,
λ
2,...
,
λ
n)
que verifican simultáneamente todas las ecuaciones del sistema.Es decir,
(
λ
1,
λ
2,...
,
λ
n)
es solución de(
S
)
sí y sólo si
=
+
+
+
=
+
+
+
=
+
+
+
m n n m m
m
n n
n n
b
a
a
a
b
a
a
a
b
a
a
a
λ
λ
λ
λ
λ
λ
λ
λ
λ
..
...
...
...
...
...
...
...
...
...
...
...
2 2 1 1
2 2
2 22 1 21
1 1 2
12 1 11
Llamaremos conjunto solución del sistema
(
S
)
, al conjunto cuyos elementos son todas las soluciones de(
S
)
.Resolver un sistema de ecuaciones significará, hallar su conjunto solución.
EJEMPLO 1
Por ejemplo, el sistema de ecuaciones
=
+
=
+
−
2
0
2
3
2 1
3 2 1
x
x
x
x
x
es un sistema de dos ecuaciones con tres incógnitas
3 2 1
,
x
,
x
2
CLASIFICACIÓN DE SISTEMAS
Clasificaremos un sistema de ecuaciones en función del número de soluciones que tenga.
Dado el sistema
(
S
)
:
=
+
+
+
=
+
+
+
=
+
+
+
m n n m m
m
n n
n n
b
x
a
x
a
x
a
b
x
a
x
a
x
a
b
x
a
x
a
x
a
..
...
...
...
...
...
...
...
...
...
...
...
2 2 1 1
2 2
2 22 1 21
1 1 2
12 1 11
1) Si el sistema
(
S
)
tiene alguna solución diremos que el sistema es compatible.Si además las soluciones para cada variable es única, diremos que el sistema es compatible y determinado. Si
(
S
)
admite más de una solución diremos que el sistema es compatible indeterminado. (En realidad se puede demostrar que si un sistema lineal admite más de una solución, entonces admite infinitas).2) Si el conjunto solución del sistema
(
S
)
es vacío diremos que el sistema es incompatible o inconsistente. Diremos que un sistema lineal de ecuaciones es homogéneo cuando tiene todos sus términos independientes nulos.SISTEMAS EQUIVALENTES
Nuestra atención ahora se centrará en presentar un método sistemático que permita resolver sistemas de ecuaciones lineales. Ese método es el llamado método de eliminación de Gauss y permite resolver un sistema lineal, cuya resolución no es trivial, a partir de otro sistema de sencilla resolución.
Antes de empezar con el método hacemos algunas precisiones.
Dos sistemas de ecuaciones
(
S
1)
y(
S
2)
(con las mismas incógnitas) se llaman equivalentes si y sólo si(
S
1)
y(
S
2)
tienen el mismo conjunto solución.Enunciaremos a continuación un teorema que nos permite construir sistemas equivalentes a un sistema dado.
TEOREMA 1
Si en un sistema lineal de ecuaciones
(
S
)
se sustituye una de sus ecuaciones por el resultado de sumar a esa misma ecuación otra cualquiera multiplicada por un número no nulo, entonces el sistema(
S
1)
que resulta de la sustitución, tiene el mismo conjunto solución que(
S
)
(es decir(
S
)
y(
S
1)
son equivalentes).Este teorema es el fundamento teórico de las transformaciones que habitualmente utilizamos para resolver sistemas de ecuaciones.
Por ejemplo, una forma de resolver el sistema
−
=
−
=
+
1
3
2
2
:
)
(
y
x
y
x
S
es multiplicar la primera ecuación por
−
3
y sumársela a la segunda, obteniendo así la ecuación:−
7
y
=
−
7
.Haciendo uso del teorema anterior tenemos que el sistema
(
S
)
es equivalente al
−
=
−
=
+
7
7
2
2
:
)
(
1y
y
x
S
, en el cual se3
OPERACIONES O TRANSFORMACIONES ELEMENTALES
.Llamaremos operaciones o transformaciones elementales en un sistema lineal de ecuaciones a: 1) intercambiar de lugar dos ecuaciones cualesquiera.
2) multiplicar a una ecuación por un número distinto de cero.
3) sumar a una ecuación del sistema, otra ecuación multiplicada por un número cualquiera. 4) sumar a una ecuación, cualquier combinación lineal de las restantes ecuaciones.
TEOREMA 2
Si a un sistema lineal de ecuaciones
(
S
)
le aplicamos una o una secuencia de transformaciones elementales, el nuevo sistema, obtenido por estas transformaciones, es equivalente al(
S
)
.Este teorema nos permitirá, realizar operaciones elementales en un sistema lineal de ecuaciones y transformarlo en otro sistema equivalente, más sencillo de resolver.
EJEMPLO 2
El sistema de ecuaciones
=
=
−
=
−
+
2
1
3
2
4
2
z
z
y
z
y
x
es sencillo de resolver ya que la tercera ecuación nos informa que
2
=
z
Si sustituimos el valor dez
=
2
en la segunda ecuación se obtieney
=
7
. Finalmente sustituyendoz
=
2
e7
=
y
en la primera ecuación obtenemos quex
=
−
4
.Tenemos de esta manera que el conjunto solución del sistema es
{
(
−
4
;
7
;
2
)
}
.Sistemas como éste, en el cual cada ecuación tiene una incógnita más que la siguiente, se dice que esta escalerizado. En general, dado que los sistemas escalerizados son sencillos de resolver, buscaremos para resolver un sistema de ecuaciones, buscar uno equivalente que esté escalerizado.
SISTEMAS ESCALERIZADOS – MÉTODO DE ELIMINACIÓN DE GAUSS
Si un sistema lineal de ecuaciones está escalerizado, entonces,
1) las incógnitas que aparecen en cada ecuación también aparecen en la anterior. 2) en cada ecuación aparecen menos incógnitas que en la ecuación anterior.
(Se sobreentiende que cuando se dice que una incógnita del sistema aparece, se quiere decir que el coeficiente que corresponde a dicha incógnita no es cero)
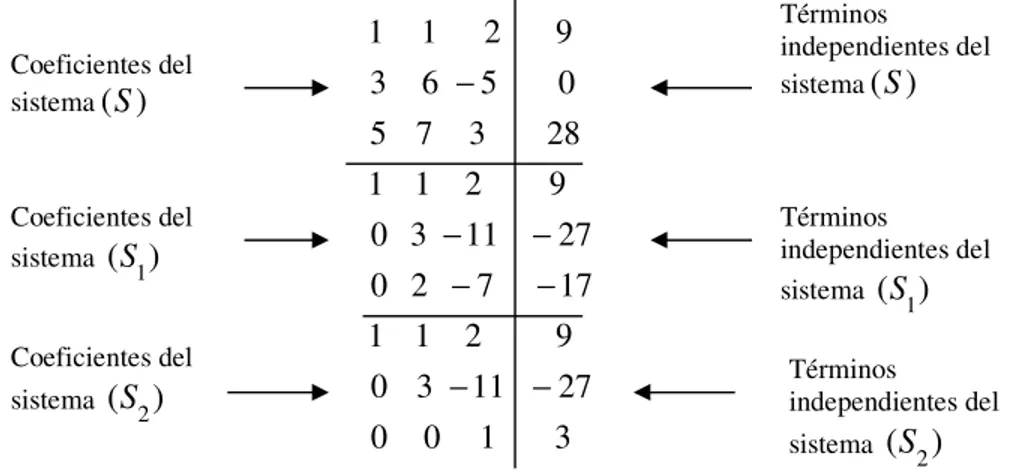
A continuación se muestra con un ejemplo, como partiendo de un sistema de ecuaciones, por medio de operaciones elementales, se obtiene un sistema escalerizado equivalente.
Consideremos el siguiente sistema de ecuaciones:
=
+
+
=
−
+
=
+
+
)
3
(
28
3
7
5
)
2
(
0
5
6
3
)
1
(
9
2
:
)
(
z
y
x
z
y
x
z
y
x
S
Comenzaremos por eliminar la variable
x
de todas las ecuaciones menos de la primera. Para ello multiplicamos la
ecuación(
1
)
por−
3
, la sumamos a la ecuación(
2
)
y el resultado lo sustituimos por la ecuación(
2
)
, luego multiplicamos la ecuación(
1
)
por−
5
, la sumamos a la ecuación(
3
)
y el resultado lo sustituimos por la ecuación)
3
(
. Obtenemos así el sistema(
)
1
S
equivalente al(
S
)
.)
(
S
1
−
=
−
−
=
−
=
+
+
)
5
(
17
7
2
)
4
(
27
11
3
)
1
(
9
2
z
y
z
y
z
y
x
Eliminamos ahora la variable
y
de la ecuación(
5
)
del sistema(
)
1
4
Obtenemos de esta forma el sistema
(
S
2)
equivalente a los sistemas(
S
)
y(
S
1)
.
=
−
=
−
=
+
+
)
6
(
3
)
4
(
27
11
3
)
1
(
9
2
:
)
(
2z
z
y
z
y
x
S
El sistema
(
S
2)
está escalerizado y su solución es la misma que la del sistema(
S
)
.Observar que el valor de
z
, se obtiene fácilmente de la ecuación(
6
)
. Sustituyendo dicho valor en la ecuación(
4
)
, podemos obtener el valor dey
. Finalmente, al sustituir en la ecuación(
1
)
,y
por2
yz
por3
obtenemosx
=
1
. Luego tanto el sistema(
S
2)
como(
S
)
tienen como conjunto solución:{
(
x
,
y
,
z
)
=
(
1
;
2
;
3
)
}
El procedimiento anterior se puede resumir en el siguiente cuadro, en el cual se ha prescindido de las incógnitas
z
y
x
,
,
y del símbolo de=
3
1
0
0
27
11
3
0
9
2
1
1
17
7
2
0
27
11
3
0
9
2
1
1
28
3
7
5
0
5
6
3
9
2
1
1
−
−
−
−
−
−
−
Esta forma de resolver un sistema de ecuaciones se llama método de escalerización(o método de eliminación de
Gauss) y se basa en el hecho de que todo sistema es equivalente a un sistema escalerizado.
Utilizaremos ahora el método de escalerización para resolver el sistema
=
+
+
=
+
+
=
+
+
30
12
7
2
24
6
5
4
9
3
2
:
)
(
z
y
x
z
y
x
z
y
x
S
Procedemos como en el ejemplo anterior.
3 3 2
2 2 3 1
3 3 1
2 2 1
0
0
0
0
4
2
1
0
9
3
2
1
2
12
6
3
0
4
12
6
3
0
9
3
2
1
30
12
7
2
24
6
5
4
9
3
2
1
F
F
F
F
F
F
F
F
F
F
F
→
+
→
−
→
+
−
→
+
−
−
−
−
Es común especificar las operaciones elementales efectuadas en el sistema. Así por ejemplo, la notación
2 2 1
4
F
+
F
→
F
−
significa que se ha sustituido en el sistema original la segunda ecuación, por la suma de ella y la primera ecuación multiplicada por−
4
Luego cuando se escribe
F
2+
F
3→
F
3se quiere indicar que se ha sustituido la tercera ecuación del cuadro 2, por la suma de la segunda y la tercera fila del cuadro 2.
CUADRO 1
CUADRO 2
CUADRO 3
Coeficientes del sistema
(
S
)
Términos
independientes del sistema
(
S
)
Coeficientes del sistema
(
)
1
S
Términos
independientes del sistema
(
S
1)
Términos
independientes del sistema
(
S
2)
Coeficientes del5
Una vez escalerizado el sistema tenemos que la solución de nuestro sistema
(
S
)
es la misma que la del siguiente sistema:
=
+
=
+
+
4
2
9
3
2
:
)
(
z
y
z
y
x
S
eEl sistema
S
e tiene infinitas soluciones y podemos expresar su conjunto solución en función de una cualquiera de las variables.z
z
z
x
z
y
x
z
y
x
z
y
z
y
+
=
−
−
−
=
−
−
=
↔
=
+
+
−
=
↔
=
+
1
3
)
2
4
(
2
9
3
2
9
9
3
2
2
4
4
2
Concluimos entonces, que
(
S
)
es compatible indeterminado y su conjunto solución es{
(
1
+
z
,
4
−
2
z
,
z
)
,
z
∈
R
}
Ejercicio 1
Utilizando el método de eliminación de Gauss, resolver los siguientes sistemas de ecuaciones:
1)
=
−
+
=
+
+
=
+
+
4
2
3
24
6
5
4
9
3
2
z
y
x
z
y
x
z
y
x
2)
=
+
=
−
=
+
+
1
0
2
2
y
x
z
y
z
y
x
3)
=
+
−
=
+
+
=
+
−
3
2
2
2
0
2
1
z
y
x
z
y
x
z
y
x
MATRICES Y SISTEMAS DE ECUACIONES LINEALES.
Para hallar las soluciones de un sistema de ecuaciones, es suficiente con conocer los coeficientes y los términos independientes del sistema. Se debe además conocer a que ecuación pertenece cada término independiente del sistema y a su vez cada coeficiente a que incógnita multiplica. Es por esta razón que conviene introducir el concepto de matriz. Informalmente podemos decir que una matriz
A
de orden, dimensión o tamañom
×
n
(m
porn
) sobre un cuerpoK
es un conjunto dem
⋅
n
elementos deK
dispuestos en un cuadro rectangular conm
filas yn
columnas.La matriz
A
se representa así:
=
mn m
m m
n n
a
a
a
a
a
a
a
a
a
a
a
a
A
...
...
...
...
...
...
...
...
...
...
...
...
..
...
3 2 1
2 23
22 21
1 13
12 11
donde cada
a
ij es un elemento del cuerpoK
.Cada
a
ij es llamado entrada de la matriz. El índicei
indica el número de la fila yj
el número de la columna a la que pertenece la entrada aij.Por ejemplo:
−
=
2
0
7
6
2
1
A
es una matriz de dos filas y tres columnas,B
=
(
1
−
2
3
5
)
de una fila y cuatrocolumnas,
C
=
( )
1
de una fila y una columna y
=
0
0
1
2
1
0
1
1
1
6
Las matrices se pueden utilizar para organizar una serie de datos. Por ejemplo las notas obtenidas por cuatro alumnos de un liceo en los exámenes de matemática (
m
)
, física(
f
)
y química(
q
)
se pueden organizar en una matrizA
de cinco filas y tres columnas como se muestra a continuación.
=
11
7
10
3
8
5
7
9
6
7
4
2
A
Podemos decir entonces que, informalmente, una matriz es un arreglo de elementos en filas y columnas, que nos permite almacenar información.
Formalmente podemos definir matriz de la siguiente manera:
DEFINICIÓN DE MATRIZ
Si
m
yn
son números naturales positivos yD
el conjunto de todos los pares(
i
,
j
)
de números naturales tales quem
i
≤
≤
1
y1
≤
j
≤
n
, una funciónA
cuyo dominio seaD
es llamada matriz de orden o tamañom
×
n
. La imagen del par(
i
,
j
)
por la funciónA
se anota:a
ij y se dice que es un elemento o entrada de la matriz. Normalmente las entradas de la matriz se disponen, como fue visto anteriormente, en un rectángulo dem
filas yn
columnas. En esta forma de ordenar los elementos de una matriz,a
ij representa al elemento que pertenece a la filai
y a la columnaj
de la matrizA
.La matriz
A
de tamañom
×
n
y entradasa
ij la anotaremosA
=
(
a
ij)
m×n o simplementeA
=
(
a
ij)
cuando seaclaro su tamaño.
EJEMPLO 3
Si definimos la matriz
A
de la siguiente forma:{
i
j
N
N
i
j
}
R
A
:
(
,
)
∈
×
/
1
≤
≤
2
∧
1
≤
≤
3
→
tal queA
(
i
,
j
)
=
a
ij=
2
i
−
j
, tenemos que:1
,
2
,
3
,
1
,
0
,
1
12 13 21 22 2311
=
a
=
a
=
−
a
=
a
=
a
=
a
y por tanto escribimos:
−
=
1
2
3
1
0
1
A
FORMA MATRICIAL DE UN SISTEMA DE ECUACIONES
Dado el sistema
(
S
)
:
=
+
+
+
=
+
+
+
=
+
+
+
m m
m m
n n
n n
b
x
a
x
a
x
a
b
x
a
x
a
x
a
b
x
a
x
a
x
a
3 3 2
2 1 1
2 2
2 21 1 12
1 1
2 12 1 11
..
...
...
...
...
...
...
...
...
...
...
...
de
m
ecuaciones conn
incógnitas,llamaremos matriz del sistema a la matriz
=
mn m
m
n n
a
a
a
a
a
a
a
a
a
A
....
...
...
...
...
....
...
....
...
2 1
2 22
21
1 12
11
de dimensión
m
×
n
cuyas entradas sonlos coeficientes del sistema y matriz de los términos independientes a la matriz
=
m
b
b
b
B
...
2 1
.
7
Llamamos matriz ampliada del sistema
(
S
)
a la matriz de dimensiónm
×
(
n
+
1
)
que anotamosA
/
B
y tal que
=
m mn m
m
n n
b
a
a
a
b
a
a
a
b
a
a
a
B
A
....
...
...
...
...
....
...
....
...
/
2 1
2 2 22
21
1 1 12
11
La información fundamental de un sistema lineal de ecuaciones está dada en la matriz ampliada del sistema. A su vez como cada fila de esta matriz corresponde a una de las ecuaciones del sistema, las operaciones elementales efectuadas a las ecuaciones del sistema en el método de escalerización son operaciones realizadas sobre las filas de esta matriz.
Por ejemplo, para el sistema
=
−
=
+
+
−
=
+
−
+
0
7
2
2
1
3
:
)
(
t
y
z
y
x
t
z
y
x
S
, su matriz ampliada es:
−
−
−
=
0
1
0
1
0
7
0
2
1
2
1
1
1
3
1
/
B
A
LA ESCALERIZACIÓN DE UN SISTEMA EN FORMA MATRICIAL
Llamamos matriz escalerizada o escalonada a una matriz que cumpla las siguientes condiciones: 1) todas las filas, salvo quizás la primera, comienzan con un cero o una sucesión de ceros. 2) cada fila tiene al principio por lo menos un cero más que la fila inmediata superior.
Ejemplos de matrices escalerizadas son:
−
=
1
1
0
0
0
0
0
1
2
0
3
3
1
0
1
A
,
−
=
1
0
0
0
2
1
0
0
0
1
2
0
1
1
0
1
B
,
−
=
0
0
0
1
2
0
1
0
1
C
−
=
1
0
0
1
0
1
D
y
−
=
0
0
1
2
0
3
3
1
0
1
E
Dado que cada fila de la matriz ampliada de un sistema lineal de ecuaciones corresponde a una ecuación del sistema, es que las operaciones elementales efectuadas al sistema se traducen en operaciones sobre la matriz.
Las operaciones elementales en el contexto de las matrices serán: 1) intercambiar de lugar dos filas cualesquiera.
2) multiplicar una fila por un número distinto de cero (entendiendo por esto, el hecho de multiplicar ese número por cada elemento de la fila).
3) sumar a una fila de la matriz, otra fila multiplicada por un número cualquiera (sumar dos filas significa sumar el elemento i-ésimo de la primera fila con el elemento i-ésimo de la segunda fila.)
4) sumar a una fila cualquier combinación lineal de las restantes filas.
Escalerizar una matriz es llevarla a una forma escalerizada por medio de operaciones o transformaciones elementales entre sus filas y este procedimiento siempre es posible realizarlo con un número finito de transformaciones elementales. Si
E
es una matriz que se obtiene escalerizando otra matrizA
, diremos queE
es una forma escalerizada deA
Diremos que un sistema está escalerizado cuando lo está su matriz ampliada. Escalerizar un sistema, es escalerizar la matriz ampliada del sistema.Llamando pivote a la primera entrada no nula de cada fila de una matriz.
En la matriz
−
=
0
0
0
0
0
1
1
0
0
0
0
0
1
2
0
3
3
1
0
1
8
Podemos describir el método de eliminación de Gauss como aquel que busca a través de la reiterada aplicación de operaciones elementales, dejar un único pivote por columna. En cada paso de la escalerización, una vez elegido el pivote, lo empleamos para lograr ceros en las restantes entradas de la columna.
Una matriz
A
puede tener más de una forma escalerizada, sin embargo la cantidad de pivotes o la cantidad de filas no nulas, que tiene cualquier forma escalerizada deA
es siempre la misma.EJEMPLO 4
Resolveremos el sistema
=
+
+
+
=
+
−
+
+
=
+
−
+
+
0
2
0
3
2
3
1
2
4
3
:
)
(
5 4 2 1 5 4 3 2 1 5 4 3 2 1x
x
x
x
x
x
x
x
x
x
x
x
x
x
S
La matriz ampliada del sistema es:
−
−
=
0
1
2
0
1
1
0
3
2
1
3
1
1
2
4
1
3
1
/
B
A
El procedimiento de resolución comienza eligiendo el pivote de la primera fila que es
1
y utilizarlo para lograr ceros en las restantes entradas de la primera columna. Obtenemos así la matriz:
−
−
−
−
−
−
1
1
6
1
2
0
1
1
2
0
0
0
1
2
4
1
3
1
Las operaciones realizadas fueron:
F
2−
F
1→
F
2y
F
3−
F
1→
F
3Tomamos ahora el pivote de la segunda fila el cual corresponde al
2
y lo utilizamos para lograr ceros en las restantes entradas de la columna4
, obtenemos así la matriz:
−
−
−
−
−
2
4
0
1
2
0
1
1
2
0
0
0
1
4
0
1
3
1
Las operaciones en este último proceso fueron:
2
F
2+
F
1→
F
1y
−
3
F
2+
F
3→
F
3Finalmente intercambiando la fila 3 por la fila 2 se obtiene la matriz ampliada escalerizada del sistema:
−
−
−
−
−
1
1
2
0
0
0
2
4
0
1
2
0
1
4
0
1
3
1
Luego resolver el sistema
(
S
)
es equivalente a resolver el sistema:
−
=
+
=
−
−
−
−
=
+
+
+
1
2
2
4
2
1
4
3
:
)
(
5 4 5 3 2 5 3 2 1x
x
x
x
x
x
x
x
x
S
eDado que
x
5=
−
1
−
2
x
4,
x
3=
−
2
x
2−
4
x
5−
2
=
−
2
x
2−
4
(
−
1
−
2
x
4)
−
2
=
−
2
x
2+
8
x
4+
2
y1
1
)
2
1
(
4
2
8
2
3
1
4
3
2 3 5 2 2 4 4 21
=
−
x
−
x
−
x
−
=
−
x
+
x
−
x
−
−
−
−
x
−
=
−
x
+
x
, el sistema(
S
)
es compatibleindeterminado y el conjunto solución es
{
−
x
x
−
x
+
x
+
x
−
−
x
x
∈
R
x
∈
R
}
4 2 4 4 4 2 2
2
,
,
2
8
2
,
,
1
2
)
,
,
1
(
Ejercicio 2
Resolver los siguientes sistemas de ecuaciones por el método de escalerización de Gauss.
9 Ejercicio 3
Calcular los pesos
w
1,
w
2,
w
3 yw
4 para que las palancas de la figura queden balanceadas.(Sugerencia: Aplicar la ley de las palancas de Arquímedes que afirma que: dos masas en una palanca están en equilibrio cuando sus pesos son inversamente proporcionales a sus distancias al punto de apoyo.)
Ejercicio 4
Para resolver el siguiente problema se deben tener en cuenta las siguientes leyes:
Segunda ley de Kirchoff: La suma algebraica de las diferencias de potencial existentes en cualquier camino cerrado o malla de un circuito eléctrico es igual a cero.
Para el siguiente circuito (que tiene dos nodos A y B y tres caminos cerrados BCAB, BADB y BCADB) se pide calcular los valores de las corrientes
i
1 ,i
2 yi
3. (Se utilizará la ley de Ohm: V=R.i )Ejercicio 5
El departamento de biología de determinado país proporciona tres tipos distintos A, B y C de comida a un lago en el cual habitan tres especies distintas de peces. Cada pez de la especie 1 consume cada semana 1 unidad del alimento A, 1 unidad del alimento B y 2 unidades del alimento C. Cada pez de la especie 2 consume cada semana 3 unidades del alimento A, 4 unidades del alimento B y 5 unidades del alimento C. Finalmente, cada pez de la especie 3 consume cada semana 2 unidades del alimento A, 1 unidad del alimento B y 5 unidades del alimento C. Cada semana se le
proporciona al departamento de biología 25000 unidades del alimento A, 20000 unidades del alimento B y 55000 unidades del alimento C.
1) Suponiendo que los peces se comen todo el alimento, calcular cuántos peces de cada especie pueden existir en el lago. ¿Tiene el problema infinitas soluciones?
2) Sabiendo que conviven 6000 peces de la especie 3, calcular el número de peces que habitan de la especie 1 y 2.
Primera ley de Kirchoff: En cualquier nodo, la suma de las corrientes que entran en ese nodo es igual a la suma de las corrientes que salen de él. (Un nodo es un punto del circuito donde se unen más de un terminal de un componente eléctrico.)
10 Ejercicio 6
En una determinada zona de una cuidad las calles tienen un único sentido. Se quiere analizar el flujo de tráfico en cada una de esas calles. El sentido del tráfico en cada una de las calles está dado en la siguiente figura.
En varios sitios se han colocado contadores, y el número promedio de autos que pasan por cada calle en 1 hora, aparece en la figura adjunta. Las variables
x
1,
x
2,
x
3,
x
4,
x
5,
x
6 yx
7 representan respectivamente, el número de autos por hora que pasan de la intersección A a la intersección B, de la intersección B a la intersección C, etc.Asumiendo que los autos siempre están en movimiento y que el número de autos que llega a la intersección de dos calles es igual al número de autos que sale de dicha intersección.
1) Hallar los valores posibles de cada variable
x
1,
x
2,
x
3,
x
4,
x
5,
x
6 yx
7 .2) Supongamos que la calle que va de D a E va a estar en reparación, por lo que se requiere que el tráfico en este espacio sea mínimo. ¿Cuál debe ser el número mínimo de autos que se debería permitir en dicho tramo? ¿Qué solución daría para lograr ese mínimo?
3) ¿Cuál sería la solución óptima al tráfico en el caso que todo el tramo de D a F estuviera en reparación?
DISCUSIÓN DE UN SISTEMA LINEAL DE ECUACIONES QUE DEPENDEN DE
ALGÚN PARÁMETRO
EJEMPLO 5
Dado el siguiente sistema de ecuaciones que depende de un número real
m
:
=
+
+
=
−
+
+
+
=
+
+
1
)
1
(
1
:
)
(
z
my
x
m
z
m
y
mx
m
z
y
x
S
Resolveremos dicho sistema discutiendo según los distintos valores que puede tomar el número real
m
.Comenzamos escribiendo la matriz ampliada del sistema:
−
+
1
1
1
1
1
1
1
1
1
m
m
m
m
m
Escalerizamos el sistema:
2 3 3
2 2
3 3 1
2 2 1 2
1
0
0
1
1
0
1
1
1
1
0
1
0
)
0
(
1
1
0
1
1
1
1
1
1
1
1
1
1
1
1
1
F
F
F
m
m
m
m
m
F
F
F
m
m
m
F
F
mF
m
m
m
m
m
m
m
m
→
+
−
−
−
−
−
+
−
+
→
+
−
−
+
−
≠
→
+
−
−
−
+
−
+
−
11
Observemos que en el proceso de escalerización, se vió la necesidad de multiplicar una de las ecuaciones por
m
, por tal motivo, para conservar la equivalencia entre el sistema original y el sistema equivalente es que debe exigirse que sea0
≠
m
. Por lo tanto, el casom
=
0
debe considerarse aparte.El sistema escalerizado equivalente al sistema
(
S
)
cuandom
≠
0
es
−
−
=
−
−
=
−
+
−
+
=
+
+
m
m
z
m
z
y
m
m
z
y
x
S
e2 2
)
1
(
1
:
)
(
La última ecuación de este último sistema conduce a
z
=
m
2+
m
Además, sim
≠
1
, tenemosm
m
y
−
=
1
ym
m
m
m
m
m
m
m
m
x
−
+
−
−
=
−
−
−
−
+
=
1
2
1
1
1
3 2 2
Resumiendo:
1) Si
m
≠
0
ym
≠
1
el sistema(
S
)
es compatible y determinado y el conjunto solución es:{
(
m −m−m− m+;
−mm;
m
2+
m
)
;
m
∈
R
}
1 1
1 2 2 3
2) Si
m
=
0
el sistema a resolver es
=
+
=
−
=
+
+
1
0
1
:
)
(
z
x
z
y
z
y
x
S
y su conjunto solución es{
(
1
;
0
;
0
)
}
3) Si
m
=
1
, el sistema(
S
)
se transforma en
=
+
+
=
+
=
+
+
1
1
2
:
)
(
z
y
x
y
x
z
y
x
S
el cual es claramente incompatible.Es decir, el sistema es compatible y determinado si
m
≠
1
y en este caso el conjunto solución es{
(
m −m−m− m+;
−mm;
m
2+
m
)
;
m
∈
R
}
1 1 2 1
2 3
. En el caso que
m
=
1
, el sistema es incompatible.Ejercicio 7
Resolver los siguientes sistemas de ecuaciones discutiendo según
m
∈
R
1)
=
+
−
=
+
=
−
0
2
1
2
1
my
x
y
x
y
x
2)
=
−
−
+
−
=
−
+
=
+
+
−
m
t
z
y
x
z
y
mx
t
z
y
x
2
3
2
1
2
3)
=
+
=
+
+
=
−
+
5
4
5
3
1
my
x
mz
my
x
z
y
x
4)
=
−
+
=
−
+
=
+
−
=
+
+
m
z
y
x
z
y
x
z
y
x
z
y
x
2
3
2
2
4
3
5
3
2
1
3
5)
=
−
+
+
=
−
+
+
=
−
+
+
m
u
z
y
x
u
z
y
x
u
z
y
x
7
6
12
5
3
5
5
7
3
2
3
4
3
12
RESPUESTAS
Ejercicio 1 1) Sistema compatible y determinado con conjunto solución
{
(
x
,
y
,
z
)
=
(
4
;
−
2
;
3
)
}
2) sistema compatible indeterminado con conjunto solución{
(
1
−
z
,
z
,
z
)
,
z
∈
R
}
3) Sistema incompatible. Ejercicio 2 1) Sistema compatible y determinado con conjunto solución
S
=
{
(
x
,
y
,
z
)
=
(
1
,
2
,
3
)
}
2) Sistema incompatible. 3) Sistema compatible indeterminadoEjercicio 3 Existen infinitos pesos para los cuales el sistema está en equilibrio. Las soluciones del sistema son
4 4 4 4 4
15
5
,
, 4
,
,
2
w
2
w
w w
w
+
∈
ℝ
Ejercicio 4
25
46
1
=
i
,25
42
2
=
i
,25
4
3
=
i
Ejercicio 5 1) Si
x
,
y
,
z
son el número de peces de cada especie, se debe tener,8000
5000
,
5000
,
5
40000
,
15000
0
≤
x
≤
x
=
−
z
y
=
z
−
≤
z
≤
2)10000
de la especie 1 y1000
de laespecie 2. Si bien el sistema de ecuaciones tiene infinitas soluciones, el problema tiene un número finito de soluciones ya que
x
,
y
,
z
son números naturales y hay3001
posibilidades para el valor dez
ya que5000
≤
z
≤
8000
Ejercicio 6
=
+
−
=
−
+
=
+
=
−
=
+
−
=
+
D) ón intersecci la
en (tráfico
E) ón intersecci la
en (tráfico
F) ón intersecci la
en (tráfico
C) ón intersecci la
en (tráfico
B) ón intersecci la
en (tráfico
A) ón intersecci la
en (tráfico
50
600
750
500
200
800
:
)
(
7 5
7 6 4
6 3
5 2
4 2 1
3 1
x
x
x
x
x
x
x
x
x
x
x
x
x
x
S
como las xi son número de autos por hora de una intersección a otra, no son permitidos valores negativos para
las xi, ya que como las calles son en una dirección, un valor negativo de xi se interpreta como el número de autos
que van en contravía. Con esta restricción tenemos
x
3=
750
−
x
6 y por lo tantox
6≤
750
,x
5=
x
7−
50
y por lo tantox
5≥
50
Supongamos ahora que la calle que va de D a E va a estar en reparación, por lo que se requiere que el tráfico en este espacio sea mínimo. Esto nos lleva a x7 = 50, x2 = 500 y x5 = 0. Recíprocamente si x5 = 0, tenemos
x7 = 50, entonces, si cerramos la carretera entre C y D tendremos el mínimo tráfico posible entre D y E. Los
flujos