Toeplitz
Edgar Juli´an Su´arez Ca˜n´on Estudiante de Pregrado en Matem´aticas
Pontificia Universidad Javeriana
Asesor:
Johan Manuel Bogoya Ram´ırez
Doctor en Matem´aticas´
Indice general
Introducci´on IX
1. Espacios de Hilbert 1
1.1. Propiedades y ejemplos . . . 2
1.2. Proyecciones ortogonales . . . 8
1.3. Funcionales lineales . . . 12
1.4. Conjuntos ortonormales y bases . . . 14
2. Operadores en espacios de Hilbert 23 2.1. Operadores acotados . . . 23
2.2. Idempotentes y proyecciones . . . 29
2.3. Operadores compactos y de rango finito . . . 30
3. Espacios de Banach 37 3.1. Propiedades . . . 37
3.2. Operadores lineales en espacios de Banach . . . 40
4. C∗-´algebras 45 4.1. ´Algebras de Banach . . . 45
4.1.1. Definiciones y ejemplos . . . 45
4.1.2. Espectro y radio espectral . . . 48
4.2. C∗-´algebras . . . 54
4.2.1. Definiciones y propiedades . . . 54
5. Matrices infinitas 59 5.1. Matrices de Toeplitz y de Hankel . . . 59
5.3. Espectros . . . 67 5.4. Norma de operadores de Toeplitz y propiedades . . . 71 5.5. Valores y vectores propios . . . 76
A. Conceptos de apoyo 85
Bibliograf´ıa 91
´
Indice de figuras
1.1. Ley del paralelogramo. . . 9
1.2. Conjunto convexo y no convexo . . . 9
1.3. Proyecci´on ortogonal. . . 11
1.4. Serie de Fourier . . . 20
2.1. Ilustraci´on Teorema 2.25. . . 32
4.1. Funci´on de C0(R). . . 47
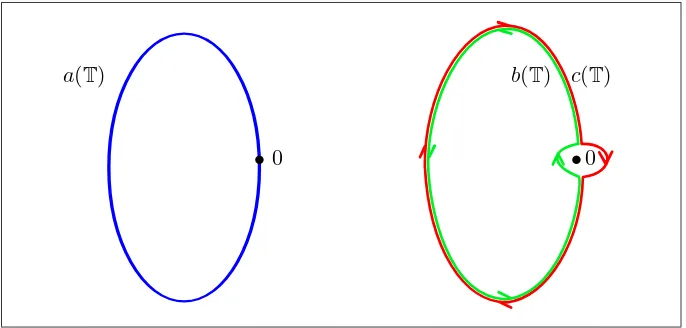
5.1. Ilustraci´on Teorema 5.56 . . . 69
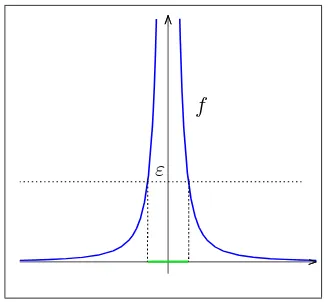
5.2. Espectro esencial y espectro de un operador de Toeplitz . . . 70
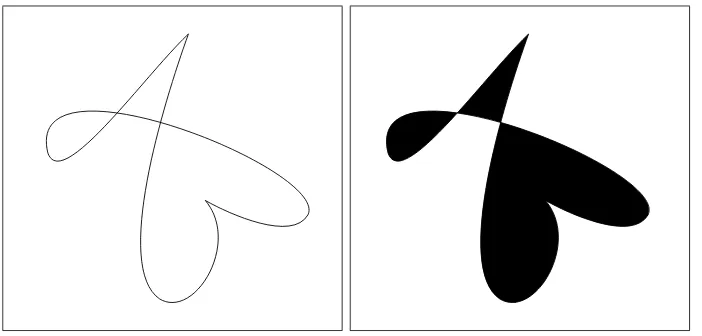
5.3. Ilustraci´on Proposici´on 5.93 . . . 81
Introducci´
on
Otto Toeplitz fue un matem´atico jud´ıo nacido en Breslau en 1881. Estudi´o en la Universidad de Breslau y se hizo doctor en geometr´ıa algebraica en 1905. Hizo parte de un grupo de matem´aticos quienes trabajaron con David Hilbert. En 1911 escribi´o “Zur Theorie der quadratischen und bilinearen Formen von unendlichvielen Ver¨anderlichen” donde consider´o las matrices de Laurent, las cuales est´an dadas por
aj−k ∞
j=−∞=
. .. ... ... ... ... . .. · · · a0 a−1 a−2 a−3 · · ·
· · · a1 a0 a−1 a−2 · · ·
· · · a2 a1 a0 a−1 · · · . .. ... ... ... ... . ..
,
y prob´o que el espectro de los operadores correspondientes a estas en ℓ2(Z), es la
imagen de ∞
X
k=−∞
aktk:t∈T
. En este mismo documento Toeplitz estableci´o que la matriz infinita aj−k∞j,k=0 induce un operador acotado en ℓ2(Z+) si y solo si
aj−k ∞
j,k=−∞ genera un operador acotado en ℓ
2(Z). Debido a este resultado las matrices aj−k∞j,k=0 llevan el nombre de matrices de Toeplitz.
Como resultado de la teor´ıa de matrices de Toeplitz,L.Bergplante´o c´omo abordar problemas de sistemas de matrices infinitas de Toeplitz de banda con herramientas de la teor´ıa de ecuaciones diferenciales, adem´as encontr´o expresiones para las entradas de los inversos en t´erminos de los ceros deay el criterio de solubilidad en los espacios de sucesionesxn ∞n=1 sujeto a la condici´on xn=O(̺n),n→ ∞.
El m´etodo de factorizaci´on de Wiener-Hopf fue introducido por N.Wiener y E.Hopf en 1931. Lo que conocemos actualmente como factorizaci´on de Wiener-Hopf tiene su origen en el trabajo de Gakhov, aunque la idea fue usada previamente por J. Plemejl y quien comprendi´o realmente su connotaci´on en la teor´ıa de operadores y las ´algebras de Banach fueMark Krein, quien lo present´o de manera clara.
El hecho que T(a) es Fredholm de ´ındice −winda siempre y cuando a no ten-ga ceros en T, est´a presentado en las obras de F. Noether, S. G. Mikhlin, N. I.
Muskhelishvili, entre otros. AunqueIsrael Gohberg prob´o en 1952 queT(a) es Fred-holm si y solo si a no tiene ceros en T, de este resultado se deriva la igualdad
´ındT(a) =−winda.
La Proposici´on 5.78 fue presentada como resultado por M.Rosenblum en el do-cumento “Self-adjoint Toeplitz operators and associated orthonormal functions” y tambi´en por A. Calder´on, F. Spitzer y H. Widom en “Inversion of Toeplitz ma-trices”. La teor´ıa propuesta por M.Rosenblum fue simplificada y generalizada pos-teriormente por R. Vreugdenhil en “The resolution of the identity for self-adjoint Toeplitz operators with rational matrix symbol”.
Lo anterior fue tomado de las notas finales del cap´ıtulo 1 de [1].
En el Cap´ıtulo 1 se encuentran enunciadas las definiciones necesarias para com-prender los espacios de Hilbert, se analizan las propiedades del producto interno y de la norma. A partir de lo anterior se presentan la definici´on, las desigualdades y las propiedades m´as conocidas de los espacios de Lebesgue. Se definen las proyec-ciones ortogonales y los funcionales lineales, donde para estos ´ultimos se tiene como resultado principal la relaci´on entre el hecho de ser acotado y la continuidad. Adi-cionalmente se define la ortogonalidad y la normalidad de elementos de los espacios de Hilbert para comprender las propiedades de los conjuntos ortogonales y de las bases de estos espacios, esto se hace con el fin de estudiar el comportamiento de las isometr´ıas y para definir la transformada de Fourier.
En el Cap´ıtulo 2 est´a definido el conjunto de los operadores acotados en espacios de Hilbert, se analizan sus caracter´ısticas y se define el adjunto de un operador. Posteriormente se definen los operadores idempotentes y se relacionan con las pro-yecciones por medio de las propiedades de ambos. Finalmente, se definen los ope-radores compactos y de rango finito donde se muestran como resultados principales la relaci´on de estos con los operadores acotados, la completitud del conjunto de los operadores compactos y su comportamiento como ideal en el conjunto de los opera-dores acotados, la densidad del conjunto de los operaopera-dores de rango finito en el de los compactos y la presentaci´on de algunos ejemplos de este tipo de operadores.
El Cap´ıtulo 3 contiene las definiciones de seminorma y norma para comprender la estructura de los espacios de Banach y la diferencia con los espacios de Hilbert. Se realiza el an´alisis de algunas propiedades y ejemplos. Este cap´ıtulo tambi´en define los operadores acotados y adjuntos sobre espacios de Banach.
El Cap´ıtulo 5 define las matrices de Toeplitz, de Hankel y su norma con el objetivo de probar que los operadores de Toeplitz son acotados y los de Hankel son compactos. En segundo lugar se analizan distintos tipos de elementos en el ´algebra de Wiener para comprender la factorizaci´on de Wiener-Hopf que permite obtener una matriz de Toeplitz como el producto de matrices de Toeplitz.
A partir de la estructura de C∗-´algebra del conjunto de los operadores acotados
Espacios de Hilbert
El presente cap´ıtulo fue extra´ıdo de las secciones 1 a 5 del cap´ıtulo 1 de [4]. David Hilbert naci´o en K¨onisberg en 1862. Fue un ma-tem´atico alem´an, considerado uno de los m´as impor-tantes del siglo XX. Estudi´o y fue profesor en la Uni-versidad de K¨onisberg entre 1886 y 1895, cuando fue transferido a la Universidad de G¨ottingen.
En 1900 enunci´o 23 problemas matem´aticos que no hab´ıan sido resueltos, lo cual es considerado uno de los aportes m´as importantes a la investigaci´on en ma-tem´aticas.
Su trabajo tuvo 5 periodos:
• Teor´ıa de invariantes (1885-1893).
• Teor´ıa algebraica de n´umeros (1893-1898).
• Elabor´o un nuevo sistema de 21 axiomas que sustituyeron los axiomas de la geometr´ıa Eucl´ıdea (1898-1902) y cre´o un programa que buscaba formular las matem´aticas sobre bases m´as s´olidas (1922-1930).
• Ecuaciones integrales (1902-1912).
• Encontr´o una soluci´on a la ecuaci´on de Maxwell-Boltzmann (1910-1922).
1.1.
Propiedades y ejemplos
Definici´on 1.1 (Espacio vectorial). Sea V un conjunto, Kun campo,+una
opera-ci´on sobreV yuel producto de elementos deV por escalares definido de la siguiente manera:
u:K× V −→K
(λ, v)7−→λ·v.
(V,+, u) es llamado espacio vectorial si (V,+) es un grupo conmutativo tal que ∀α, β ∈K y ∀ x, y, z∈ V vale que
• (α+β)·x=α·x+β·x. • α·(x+y) =α·x+α·y. • α·(β·x) = (α·β)·x. • 1·x=x 1∈K.
Observaci´on 1.2. Cuando las definiciones de + y u sean obvias denotaremos (V,+, u) s´olo porV.
Definici´on 1.3. Si V es un espacio vectorial sobreK, un semi-producto interno en
V es una funci´on u:V × V → K tal que para todo α, β ∈ K y todo x, y, z ∈ V se
satisface,
a) u(αx+βy, z) =αu(x, z) +βu(y, z). b) u(x, αy+βz) =αu(x, y) +βu(y, z). c) u(x, x)≥0.
d) u(x, y) =u(y, x).
e) u(x,0) =u(0, y) = 0.
Observaci´on 1.4. Si adem´as u(x, x) = 0 si y solo si x = 0, decimos que u es un producto interno y lo denotaremos poru(x, y) =hx, yi.
Corolario 1.5. Sean X un espacio vectorial y x1, x2 ∈ X. Entonces hx1, yi =
hx2, yi, para todoy∈ X si y solo six1 =x2.
Demostraci´on. Note que hx1−x2, yi = 0 para todo y ∈ X luego x1 −x2 = 0. La direcci´on contraria es trivial.
Ladesigualdad de Cauchy-Bunyakowsky-Schwarz debe su nombre a los matem´ ati-cosAugustin Louis Cauchy, Viktor Yakovlevich BunyakovskyyKarl Herman Aman-dus Schwarz. El primero en publicar la desigualdad fue Augustin Louis Cauchy, quien la desarroll´o para vectores en 1821. En 1859 fue Viktor Yakovlevich Bunya-kovsky quien la public´o para productos internos de operadores integrales y en 1885 la redescubri´o Karl Herman Amandus Schwarz.
Esta desigualdad es una muestra del papel que juega el nacionalismo en la ciencia, pues es citada comodesigualdad de Cauchy en Francia, desigualdad de Schwarz en Alemania ydesigualdad de Bunyakowsky en Rusia.
Teorema 1.6 (Desigualdad de Cauchy - Bunyakowsky - Schwarz).
Sea X un espacio vectorial. Si h·,·i es un semi-producto interno en X entonces |hx, yi|2≤ hx, xihy, yi para todox, y∈ X.
Demostraci´on. Seaα∈Kentonces
0≤ hx−αy, x−αyi=hx, x−αyi −αhy, x−αyi
=hx, xi −αhx, yi −α(hy, xi −αhy, yi) =hx, xi −αhx, yi −αhy, xi+ααhy, yi =hx, xi −αhx, yi −αhy, xi+|α|2hy, yi. Ahora tomemos hy, xi=beiθ conθ≥0 yb∈R+,α=e−iθt cont∈R+ luego
0≤ hx, xi −eiθtbe−iθ−e−iθtbeiθ+t2hy, yi=hx, xi −2tb+t2hy, yi =kxk2−2tb+t2kyk2 =:q(t),
dondeq(t) es un polinomio real de grado 2 con variable t.
Comoq(t)≥0 entoncesq(t) tiene dos ra´ıces complejas o una ra´ız real, es decir, el discriminante 4b2−4kxk2kyk2 ≤0. Ahora comob2 =|hx, yi|2 obtenemos|hx, yi|2−
kxk2kyk2≤0, de esta manera|hx, yi|2≤ kxk2kyk2.
■
Proposici´on 1.7. Sea V un espacio vectorial sobre K y h·,·i un producto interno
sobre V, la aplicaci´on
k · k:V −→[0,+∞[ x7−→hx, xi 1 2
Demostraci´on. Parax, y∈ V yλ∈Kverifiquemos que la aplicaci´on definida es una
norma,
• Supongamos x tal que kxk= 0 luego kxk=phx, xi = 0 pero el ´unico vector que cumple esto es 0. Por otra parte si x= 0 entonceskxk=phx, xi= 0, por lo tanto kxk= 0 ssi x= 0.
• Por las propiedades del producto interno obtenemos kλxk = phλx, λxi = q
λλhx, xi=p|λ|2hx, xi=|λ|kxk.
• Por ´ultimo verificamos que la aplicaci´on cumple la desigualdad triangular, kx+yk2 =hx+y, x+yi
=hx, xi+hx, yi+hy, xi+hy, yi =hx, xi+ 2Rehx, yi+hy, yi =kxk2+ 2Rehx, yi+kyk2.
Sabemos que Rehx, yi ≤ |hx, yi| y por la desigualdad de Cauchy-Bunyakows-ky-Schwarz tenemos que Rehx, yi ≤ |hx, yi| ≤ kxk · kykluego
kx+yk2 ≤ kxk2+ 2|hx, yi|+kyk2
≤ kxk2+ 2kxk · kyk+kyk2 = (kxk+kyk)2. Por lo tanto k · kes una norma sobre V.
■
Ejemplo 1.8. En el espacio vectorial Rn definimos el producto interno entre dos
vectoresx= (x1, x2, . . . , xn) yy = (y1, y2, . . . , yn)porhx, yi:= n X
k=1
xk·yk. La norma
respectiva es kxk:= n X
k=1 xk
2
1 2 .
En los espacios de Hilbert el producto interno genera una norma y una m´etrica, esto permite dar significado geom´etrico a los espacios vectoriales.
Observaci´on 1.9. Con la norma k · k definimos la m´etrica d tomando d(x, y) = kx−yk.
Los espacios de Lebesgue son conjuntos de funciones cuyo m´odulo a la poten-cia p es integrable. Estos espacios proporcionan herramientas para la soluci´on de problemas sobre operadores acotados en an´alisis de Fourier.
Definici´on 1.11(Espacios de Lebesgue).
• Sea X,Ω, µ un espacio de medida donde X es un conjunto,Ω una σ-´algebra y µuna medida σ-aditiva con valores en R∪+∞ .
Definimos
Lp X,Ω, µ:=
f:X →Ktal que
Z
X
|f|pdµ <∞
.
Observaci´on 1.12.
• CuandoΩ, µsean claros denotaremos Lp X,Ω, µporLp Xy su norma pork · kp.
• Cuando sea necesario identificar el cuerpoK sobre el cual se aplican las
funciones lo denotaremos as´ıLpK X,Ω, µ
.
• Sean I un conjunto de ´ındices y xii∈I una sucesi´on en R o enC, definimos
ℓp(I):=
xii∈I: X i∈I
x(i)p<∞
.
Observaci´on 1.13. SiI es no enumerable xii∈I es una red. (Ver ap´endice).
Corolario 1.14 (Desigualdad de H¨older). Sean f, g dos funciones medibles de X en K, tales que |f|,|g| < +∞ en casi todo X, es decir, que son finitas excepto en
un subconjunto de medida cero de X. Entonces para todo p, q ∈ [1,+∞] tales que 1/p+ 1/q= 1 se cumple
Z
X
|f g|dµ≤ Z
X
|f|pdµ 1
pZ
X
|g|qdµ 1
q
≤+∞, (1.1)
en t´erminos de normas,
kf gk1≤ kfkpkqkq.
Demostraci´on. Sean I:= Z
X
|f|pdµ 1
p
y J:= Z
X
|g|qdµ 1
q
Ahora como la funci´on exponencial es convexa entonces para todou, v∈R+\{0}
y todoα∈]0,1[ se cumple uαv1−α ≤αu+ (1−α)v.
Supongamos entonces que I, J ∈ R+\ {0} y para x ∈ X tomemos u= f(x)
p
Ip , v= g(x)
q
Jq en la desigualdad anterior donde α= 1/py 1−α= 1/q. Por lo tanto, f(x)g(x)
IJ ≤ 1 p
f(x)p Ip +
1 q
g(x)q Jq ,
de donde se obtiene
|f(x)||g(x)| IJ ≤
1 p
|f(x)|p Ip +
1 q
|g(x)|q Jq ,
integrando sobreX a ambos lados de la desigualdad obtenemos 1
IJ Z
X
|f(x)||g(x)|dµ≤ 1 p+
1 q = 1. Entonces se cumple la desigualdad.
■
Proposici´on 1.15. Sea X,Ω, µ un espacio de medida finita y 1 ≤ r < s < ∞ entoncesLs X⊂Lr X.
Demostraci´on. Seah∈Ls X. En la desigualdad de H¨older (1.1), tomemosp=s/r, f =|h|r yg= 1 luego 1/q= 1−r/syq=s/(s−r) entonces
Z
X
|h|rdµ≤ Z
X
|h|rs/rdµ
r/sZ
X
1s/(s−r)dµ 1−r/s
= Z
X
|h|sdµ 1/sr
µ(X)1−r/s
=khkrs µ X1−r/s <+∞. Por lo tantoh∈Lr X.
Ejemplo 1.16. Los siguientes espacios son de Hilbert:
• Sea K un compacto en un espacio de medida. El producto interno entre dos elementos f, g ∈L2(K) est´a definido porhf, gi:=
Z
K
f gdµ y cumplen las
pro-piedades de la Definici´on 1.3, de las cuales verificaremos solo la d. Sean f, g, h∈L2(K) y α, β∈K, luego
hf, αg+βhi= Z
K
f αg+βhdµ= Z
K
f αg+βhdµ
= Z
K
αf g+βf hdµ=α Z
K
f gdµ+β Z
K f hdµ
=αhf, gi+βhg, hi.
La norma generada por este producto interno es kfk2:= Z
K
|f|2dµ 1
2 .
Veamos que L2(K) es completo, es decir que cualquier sucesi´on de Cauchy (fn)n∈N ∈ L2(K) converge en L2(K). Sea S la compleci´on de L2(K).
Su-pongamos que (fn)n∈N converge a f en S, luego kfk2 = kf −fn +fnk2 ≤
kf−fnk2+kfnk2 <+∞, pues fn∈L2(K), por lo tantof ∈L2(K).
En los siguientes ejemplos es an´aloga la demostraci´on de la completitud.
• Sea G un abierto en el plano complejo C, el espacio de Bergman L2
a(G) es el conjunto de todas las funciones anal´ıticas sobreG tales que
Z Z
G
f(x+iy)2dxdy <∞.
• TomemosI =Zentonces enℓ2(Z) =
xnn∈Z:
∞
X
n=−∞
xn
2 <∞
el producto
interno entre dos sucesiones xnn∈Z y yn
n∈Z se define como
∞
X
n=−∞
xnyn y
la norma correspondiente es xnn∈Z 2:=
X∞
n=−∞
xn2
1.2.
Proyecciones ortogonales
Definici´on 1.17. Sea H un espacio de Hilbert y f, g ∈ H entonces f y g son ortogonales, denotado porf ⊥g, sihf, gi= 0.
Si A, B⊆ H entoncesA⊥B sif ⊥g para cada f ∈A y g∈B.
Teorema 1.18 (Pit´agoras). Si h1, h2, . . . , hn son vectores ortogonales 2 a 2 en H entonces
kh1+h2+· · ·+hnk2 =kh1k2+kh2k2+· · ·+khnk2.
Demostraci´on. Procedamos por inducci´on. Para n = 2, como h1 ⊥ h2 entonces
hh1, h2i= 0 y adem´as
kh1+h2k2 =hh1+h2, h1+h2i
=hh1, h1+h2i+hh2, h1+h2i
=hh1, h1i+hh1, h2i+hh2, h1i+hh2, h2i =kh1k2+kh2k2.
Supongamos que el teorema es v´alido paran=k y probemoslo para n=k+ 1, aplicando propiedades de producto interno y teniendo en cuenta que hhi, hji = 0 para todoi6=j, obtenemos
kh1+h2+· · ·+hk+hk+1k2=hh1+h2+· · ·+hk+1, h1+h2+· · ·+hk+1i =kh1+h2+· · ·+hkk2+khk+1k2
=kh1k2+kh2k2+· · ·+khkk2+khk+1k2.
■
Teorema 1.19 (Ley del paralelogramo). Si H es un espacio de Hilbert y f, g ∈ H entonces
kf +gk2+kf−gk2 = 2 kfk2+kgk2. Demostraci´on. Seanf, g∈ H luego
kf +gk2=hf+g, f+gi
=hf, fi+hf, gi+hg, fi+hg, gi =hf, fi+hf, gi+hf, gi+hg, gi =hf, fi+ 2Rehf, gi+hg, gi =kfk2+ 2Rehf, gi+kgk2. De la misma manera,
entonces
kf+gk2+kf−gk2 = 2kfk2+ 2kgk2 = 2 kfk2+kgk2.
■
f
g
f−g f
[image:21.612.164.512.178.282.2]g f +g
Figura 1.1: Ley del paralelogramo.
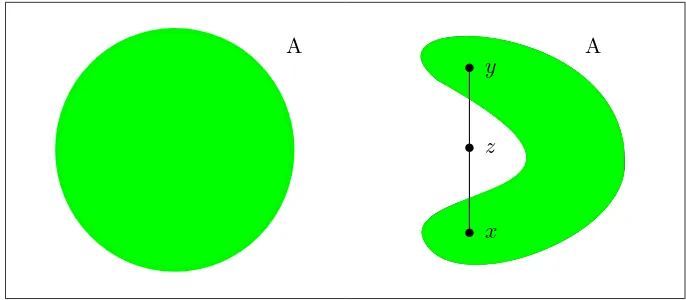
Observaci´on 1.20. El conjunto {tx+ (1−t)y: 0≤t≤1}es el segmento recto que conecta x con y.
Definici´on 1.21. Sea V un espacio vectorial sobre un campo K y A⊂ V, entonces
A es un conjunto convexo si para cada x, y∈A y 0≤t≤1, z=tx+ (1−t)y ∈A (ver Figura 1.2).
A A
• y
• z
[image:21.612.163.506.419.569.2]• x
Figura 1.2: La imagen muestra un conjunto convexo (izq.) y uno no convexo (der.) Por ejemplo conjuntos como las bolas, los cuadrados y las elipses son convexos.
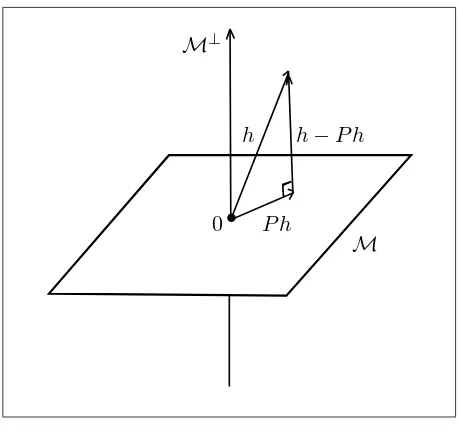
Teorema 1.23. Si M es un subespacio lineal de H y h ∈ H, sea P h el ´unico elemento deM tal queh−P h⊥ M, entonces
a) P es una transformaci´on lineal sobre H.
b) kP hk ≤ khk para cada h∈ H.
c) P2 =P dondeP2 es la composici´on de P con s´ı mismo. d) kerP =M⊥ y ranP =M.
Demostraci´on.
a) Sabemos que para todoh∈ Hse tiene queh−P h∈ M⊥. Tomemosh
1, h2∈ H y α1, α2∈K. Luego sif ∈ Mentonces
(α1h1+α2h2)−(α1P h1+α2P h2), f=α1(h1−P h1), f+
α2(h2−P h2), f=α1h1−P h1, f+α2h2−P h2, f= 0.
Como P(α1h1+α2h2) es ´unico entonces P(α1h1+α2h2) =α1P h1+α2P h2. b) Si h ∈ H entonces h = (h−P h) +P h, P h ∈ M y h−P h ∈ M⊥. As´ı, por
el Teorema 1.18, tenemos khk2 = kh−P hk2 +kP hk2 ≥ kP hk2 y como las normas son positivas, khk ≥ kP hk.
c) Si f ∈ M entoncesP f =f. Seah∈ H entoncesP h∈ M y por estoP2(h) = P P(h)=P h luegoP2 =P.
d) Si h∈kerP entoncesP h= 0 yh=h−P h∈ M⊥ luego kerP ⊂ M⊥. Ahora si h∈ M⊥ entonces 0 es el ´unico vector en Mtal que h=h−0⊥ M, luego
P h= 0 entonces kerP ⊃ M⊥. ComoP es sobreyectiva entonces ranP =M.
■
Definici´on 1.24. SiMes un subespacio lineal deHyP es la transformaci´on lineal con las caracter´ısticas enunciadas en el teorema anterior, entoncesP es llamada la proyecci´on ortogonal de H sobre M(ver Figura 1.3).
Observaci´on 1.25. Para indicar la dependencia deP con respecto aMdenotamos P como PM.
M M⊥
P h
h−P h h
[image:23.612.221.450.110.326.2]0•
Figura 1.3: Proyecci´on ortogonal.
Demostraci´on. LlamemosI el operador identidad deHy tomemos P =PM. Luego
I−P es la proyecci´on ortogonal de Hsobre M⊥ pues satisface las condiciones del
Teorema 1.23. Ahora por el incisoddel mismo, sabemos que ker I−P= M⊥⊥;
adem´as para cualquierh∈ker I−P se cumple I−Ph= 0 si y solo sih=P h. Luego M⊥⊥= ker(I −P) = ranP =M.
■
Corolario 1.27. SiA⊂ Hentonces A⊥⊥es el subespacio lineal cerrado generado
porA enH cl span(A)= A⊥⊥.
Demostraci´on. SiA⊂BentoncesB⊥es subconjunto deA⊥pues sif ∈B⊥tambien f ∈ A⊥. Como A ⊂ span(A) tenemos que span(A)⊥ ⊂ A⊥ por lo tanto A⊥⊥ es un subespacio lineal cerrado de span(A)⊥⊥que es igual a span(A) por el corolario anterior.
■
Corolario 1.28. Si Y es un subespacio lineal cerrado en H, entonces Y es denso enH si y solo si Y⊥={0}.
Demostraci´on. (⇒) Supongamos que Y es denso en H. Sabemos que para cada y∈Y la funci´on fy(x):= hy, xi es continua en H. Seah ∈Y⊥, por hip´otesis existe una sucesi´on (yn)n∈N enY tal queyn→hy adem´ashh, yni= 0. Por la definici´on de
por lo tantoY⊥={0}.
(⇐) Supongamos Y⊥={0}, es decir Y⊥⊥=H, por el corolario anterior tenemos
queH= cl span(Y) y por lo tantoY es denso en H.
■
1.3.
Funcionales lineales
Definici´on 1.29. Sea X un espacio normado sobre un campo K. Una aplicaci´on
L: X → K es llamada funcional lineal en X si para todo α, β ∈ K y x, y ∈ X,
L(αx+βy) =αL(x) +βL(y).
Proposici´on 1.30. Sea H un espacio de Hilbert sobre un cuerpo K y L: H → K
un funcional lineal, entonces los siguientes enunciados son equivalentes:
a) L es continuo.
b) L es continuo en 0.
c) L es continuo en alg´un punto.
d) Existe una constante c >0 tal que|L(h)| ≤ckhk, para todo h∈ H. Demostraci´on. Es claro que a⇒b⇒c yd⇒b.
(c⇒a) Sean h, h0 ∈ H, supongamos que L es un funcional lineal continuo en h0. Sea hn∞n=1 una sucesi´on enHtal quehn−→hentonceshn−h+h0 −→h0. Ahora por definici´on de convergencia,
L(h0) = l´ım
n→∞L(hn−h+h0)
= l´ım
n→∞ L(hn)−L(h) +L(h0)
=L(h0)−L(h) + l´ım
n→∞L(hn).
Luego,
l´ım
n→∞L(hn) =L(h).
(b⇒d) La definici´on de continuidad en 0 implica que para una bola abiertaBKen
Kde centro 0 y radio 1, la preimagen deBK porL contiene una bola con centro en
0, es decir existeδ >0 tal queB(0, δ)⊂L−1(B
K). Por lo tanto, sikhk< δentonces
|L(h)|<1.
Ahora, sih es un elemento arbitrario deH yε >0 entonces
Luego,
1> L
δh khk+ε
= δ
khk+ε· |L(h)|, |L(h)|< 1
δ ·(khk+ε) y tomandoε→0, obtenemos
|L(h)|< 1 δ · khk, entonces el valor buscado de la constante esc= 1/δ.
■
Definici´on 1.31. Un funcional lineal acotadoL sobreHes un funcional lineal para el cual existe una constante c >0 tal que|L(h)| ≤ckhk para todo h∈ H.
De acuerdo a la definici´on anterior y por la Proposici´on 1.30 podemos decir que un funcional lineal es acotado si y solo si es continuo.
Definici´on 1.32. Sea L un funcional lineal, definimos su norma como kLk:= ´ınfc >0 :|L(h)| ≤ckhk, h∈ H .
Teorema 1.33. Sea L un funcional lineal entonces
kLk= sup|L(h)|:khk= 1 (1.2) = sup
|L(h)|
khk :h∈ H, h6= 0
. (1.3)
Demostraci´on. Demostraremos la igualdad (1.2). Sea α= sup|L(h)|:khk= 1 , si khk = 1 entonces α ≥ |L(h)|, adem´as |L(h)| ≤ kLk · khk= kLk tomando supremo sobre h conkhk= 1 obtenemos α≤ kLk.
Para la igualdad (1.3) tomemos α= sup
|L(h)|
khk :h∈ H, h6= 0
, luego para todo h ∈ H se tiene |L(h)|
khk ≤
kLk · khk
khk =kLk luego α ≤ kLk. Sabemos que para todo funcional lineal existec >0 tal que
|L(h)| ≤ckhk, |L(h)| khk ≤c,
en particular, |L(h)|
khk ≤α y adem´as |L(h)|
khk ≤
kLk · khk
khk =kLk ≤α.
Teorema 1.34 (Teorema de Riesz-Fr´echet). Si L:H −→ K es un funcional lineal
acotado, entonces existe un ´unico vector h0 ∈ H tal que L(h) = hh, h0i, para todo h∈ H. Adem´as kLk=kh0k.
Demostraci´on. Sea M = kerL. Como L es continuo, M es un subespacio lineal cerrado de H. Asumamos M 6= H, M⊥ 6= {0}. Luego existe f
0 ∈ M⊥ un vector tal que L(f0) = 1. Ahora si h ∈ H y α =L(h), L(h−αf0) =L(h)−α = 0 luego h−L(h)f0 ∈ M. Entonces
0 =hh−L(h)f0, f0i=hh, f0i −L(h)kf0k2,
es decir L(h) =hh, f0/kf0k2i, por lo tanto si tomamos h0: = f0/kf0k2 entonces L(h) =hh, h0i para cualquier h∈ H.
Ahora veamos que h0 es ´unico. Supongamos ˆh0 ∈ H tal que para todo h ∈
H, L(h) =hh, h0i=hh,ˆh0i es decir hh, h0i − hh,ˆh0i =hh, h0−ˆh0i = 0 por lo tanto h0−ˆh0 ⊥ H luego h0−ˆh= 0.
Tomemos h0 ∈ H, sabemos que |L(h)| = |hh, h0i| ≤ khk · kh0k. Como L es acotado entonces kLk ≤ kh0k. Ahora L(h0/kh0k) = h0/kh0k, h0 = kh0k, por lo tantokLk=kh0k.
■
1.4.
Conjuntos ortonormales y bases
Definici´on 1.35. Un subconjunto ortonormal de un espacio de Hilbert H es un subconjunto Ede H tal que,
• Para todo e∈E,kek= 1 (normalidad).
• Si e1, e2 ∈E con e16=e2 entonces e1 ⊥e2 (ortogonalidad).
Definici´on 1.36. Sean H un espacio de Hilbert y E={en:n∈Z} un subconjunto
ortonormal de H, decimos que E es maximal si y solo si no existee∈ X, e6= 0 tal quehen, ei= 0 para todoen∈E.
Observaci´on 1.37.
• Una base ortonormal es un conjunto ortonormal maximal.
• Una base de Hamel es un conjunto linealmente independiente maximal.
Ejemplo 1.38. Sea H = L2
C
0,2π definido en la Observaci´on 1.12. Para cada n ∈ Z definamos en(t) = eint/√2π entonces E = en: n ∈ Z es un conjunto
ortonormal en H.
Veamos que efectivamente los elementos deEson ortogonales. Seanen(t), em(t)∈
Econ m, n∈Z y m6=n, luego
hen(t), em(t)i= 2π Z 0 eint √ 2π · e−imt
√
2π dt= 2π Z
0
ei(n−m)t
2π dt = 1 2π
2π Z
0
ei(n−m)tdt= 0.
Por la Definici´on 1.17 en(t), em(t) son ortogonales.
Para verificar la normalidad de E tomemos en(t)∈Eluego,
ken(t)k2=hen(t), en(t)i= 2π Z 0 eint √ 2π · e−int √
2πdt= 2π Z
0 1
2πdt= 1.
Teorema 1.39 (Proceso de ortogonalizaci´on de Gram-Schmidt). Si H es un es-pacio de Hilbert y {hn:n ∈ N} es un conjunto linealmente independiente de H
entonces existe un conjunto ortonormal {gn: n ∈ N} tal que span{g1, . . . , gn} = span{h1, . . . , hn} con n∈N.
Demostraci´on. Probaremos el teorema por inducci´on sobren. Como{hn:n∈N}es un conjunto linealmente independiente deHtomemosh1 6= 0 yg1=h1/kh1k, luego el conjunto{g1}es trivialmente ortonormal. Ahora por hip´otesis de inducci´on supon-gamos que{g1. . . gn}es ortonormal. Note quehn no puede expresarse como combi-naci´on deh1, . . . , hn−1 pues son linealmente independientes y por consiguiente tam-poco como combinaci´on deg1, . . . , gn−1. Por esto, el vectorfn:=hn−
n−1 X
j=1
hhn, gjigj
es no nulo y ortogonal agj con 1≤j≤n−1, entonces tomemos gn=fn/kfnk. Por construcci´on, gn es combinaci´on lineal de g1, g2, . . . , gn−1, hn y hn es combinaci´on lineal deg1, g2, . . . , gn. Por lo tanto span{g1, . . . , gn}= span{h1, . . . , hn}.
■
Ejemplo 1.40. En el Teorema 1.39 tomemos h1 = sinx, h2 = cosx y h3 =ex en L2[0, π]y construyamos g1, g2 y g3.
Calculamoskh1k2= π Z
0
sin2(x)dx= π
2 luegog1 =
sin(x) ksin(x)k =
√
2 sin(x) √
π ,note que
kg1k2 = π Z 0 √ 2 sin(x) √ π 2 dx= π Z 0
2 sin2(x)
Similarmente obtenemos
g2 =
h2− hh2, g1ig1
kh2− hh2, g1ig1k = √ 2 cos(x) √ π y
g3 =
√
2 exπ−sin(x)−sin(x)eπ+ cos(x) + cos(x)eπ p
π(−2−4eπ−π−2e2π+πe2π) ,
donde kg2k = kg3k = 1, luego {g1, g2, g3} es un conjunto ortonormal y adem´as span{h1, h2, h3}= span{g1, g2, g3}.
Proposici´on 1.41. Sea {e1, e2, . . . , en} un conjunto ortonormal en H. Si M = span{e1, e2, . . . , en} y P la proyecci´on ortogonal de H sobre M entonces P h =
n X
k=1
hh, ekiek, para todoh∈ H.
Demostraci´on. TomemosQh= n X
k=1
hh, ekiek, luego para 1≤j≤n se tiene
hQh, eji= n X
k=
hh, ekihek, eji=hh, eji,
ya que ek ⊥ej para todo k6= j. Por lo tanto hh−Qh, eji = 0 para 1 ≤j ≤ n, es decir,h−Qh ∈ M⊥ para todo h∈ H. Ahora como Qh∈ M entoncesQh =h
0 es el ´unico vector enMtal queh−h0 ⊥ M, as´ıQh=P hpara todoh∈ H.
■
Proposici´on 1.42 (Desigualdad de Bessel). Si h∈ Hy{en:n∈N}es un conjunto ortonormal enH entonces
∞
X
n=1
|hh, eni|2≤ khk2.
Demostraci´on. Sea hn=h− n X
k=1
hh, ekiek entonces hn es ortogonal a ek para 1 ≤ k≤n. Por el Teorema 1.18,
khk2 =khnk2+ n X k=1
hh, ekiek 2
=khnk2+ n X
k=1
hh, eki2 ≥ n X
k=1
hh, eki2.
Tomandon→ ∞ queda demostrada la desigualdad.
Teorema 1.43. SiEes un conjunto ortonormal entonces los siguientes enunciados son equivalentes:
a) Ees una base para H.
b) Si h∈ H y h⊥E entoncesh= 0.
c) El subespacio lineal cerrado generado por E es todo el espacio H.
d) Si h∈ H entonces h=P{hh, eie:e∈E}.
e) Si g, h∈ H entonceshg, hi=P{hg, eihe, hi:e∈E}. f ) Si h∈ H entonces khk2 =P{|hh, ei|2:e∈E}.
Demostraci´on. (a ⇒ b) Supongamos h ⊥ E y h 6= 0 entonces E∪ {h/khk} es un conjunto ortonormal que contiene propiamente aElo cual contradice la maximalidad de E.
(b ⇔ c) Por el Corolario 1.28 el espacio lineal cerrado generado por E es H ssi
E⊥={0}.
(b ⇒ d) Si h ∈ Hentonces f =h−P{hh, eie:e ∈E} es un vector bien definido. Si e1 ∈ E entonces tomemos hf, e1i = hh, e1i −P{hh, eihe, e1i: e∈ E} =hh, e1i −
hh, e1i= 0 esto quiere decir que f ∈E⊥ luego f = 0.
(d⇒ e) Seanh, g ∈ H dondeh=P{hh, eie: e∈E} yg =P{hg, eie:e∈E} luego hg, hi=P{hg, eihe, hi:e∈E}.
(e⇒f) Comohh, hi=khk2 se cumple la implicaci´on.
(f ⇒ a) Si E no es una base entonces existe un vector e0 ∈ H tal que ke0k = 1 y e0 ⊥E luego 0 =P{|he0, ei|2:e∈E} 6=ke0k2 lo cual es una contradicci´on.
■
Proposici´on 1.44. Si H es un espacio de Hilbert dos bases cualesquiera tienen el mismo tama˜no.
Demostraci´on. SeanE={e1, e2, . . . , eε}yF={f1, f2, . . . , fη}bases deH. Suponga-mos, sin p´erdida de generalidad, queε < ηy tomemosT1={f1, e1, e2, . . . , eε}. Como
Ees base entonces para alg´un j se tiene que ej depende de los dem´as elementos de T1, por lo tanto podemos considerarS1 ={f1, f2, e1, . . . , ej−1, ej+1, . . . , eε}y repeti-mos el mismo razonamiento hasta encontrar un conjunto linealmente independiente. Finalmente obtendremos que Sε = {f1, f2, . . . , fε} es linealmente independiente y genera aK. Por lo tantoε=η.
■
Definici´on 1.46. Un espacio es separable si tiene un subconjunto denso enumerable.
Definici´on 1.47. Sean H, K espacios de Hilbert y U:H → K una aplicaci´on li-neal sobreyectiva. Si hU h, U gi = hh, gi para todo h, g ∈ H decimos que U es un isomorfismo. En tal caso H yK se dicen isomorfos.
Definici´on 1.48. Sean (X,k·kX)y(Y,k·kY) dos espacios m´etricos. Una aplicaci´on
f de X enY es una isometr´ıa si se cumple quex
X =
f(x)
Y para todo x∈ X.
Proposici´on 1.49. Si V:H → K es una transformaci´on lineal entre espacios de Hilbert entoncesV es una isometr´ıa si y solo sihV h, V gi=hh, gipara todoh, g∈ H. Demostraci´on. (⇒) Supongamos que V es una isometr´ıa. Si h, g ∈ H y λ ∈ K
entoncesh+λg ∈ H y kh+λgk2 =hh+λg, h+λgi=hh, hi+λhh, gi+λhg, hi+ λλhg, gi=khk2+λhh, gi+λhg, hi+|λ|2kgk2 =khk2+ 2Reλhh, gi+|λ|2kgk2. Luego como V es isometr´ıa se tiene khk = kV hk y kgk = kV gk, adem´as kh+λgk2 = hh+λg, h+λgi=V(h+λg)2 =V h+λV g2 =hV h+λV g, V h+λV gi. Por lo anteriorkhk2+ 2Reλhh, gi+|λ|2kgk2=kV hk2+ 2ReλhV h, V gi+|λ|2kV gk2, por lo tantoReλhV h, V gi =Reλhh, gi para todo λ∈K. Si K=R entonces basta tomar
λ= 1 para obtener la igualdad, mientras que si K=C debemos tomar λ=i para
quehh, gi,hV h, V gi tengan la misma parte real e imaginaria. (⇐) Asumamos que hV h, V gi=hh, gi para todoh, g ∈ H luego
kV hk2 =hV h, V hi=hh, hi=khk2 por lo tantoV es una isometr´ıa.
■
Ejemplo 1.50. Sea S:ℓ2(N) → ℓ2(N) tal que S(α
1, α2, . . .) = (0, α1, α2, . . .), ve-remos queS es isometr´ıa no sobreyectiva.
Sea xnn≥1 ∈ ℓ2(N) luego xnn≥1 = s
X
n≥1
|xn|2 = (0, x
1, x2, . . .) =
S (xn)n≥1, por lo tanto S es isometr´ıa. Para verificar que S no es sobreyec-tiva basta tomar xnn≥1 = (x1, x2, . . .) ∈ ℓ2(N) tal que x1 6= 0 por lo tanto no existe xˆnn≥1∈ℓ2(N) tal queS (ˆxn)n≥1= xnn≥1.
Teorema 1.51. Dos espacios de Hilbert son isomorfos si y solo si tienen la misma dimensi´on.
Demostraci´on. (⇒) SiU:H → Kes un isomorfismo yEes una base paraHentonces U(E) es una base paraK, luego comoU es biyectivo #E= #U(E) entonces dimH= dimK.
ℓ2(E), donde parah∈ Hdefinimos ˆh∈ℓ2(E), como ˆh:E→Kdada por ˆh(e) =hh, ei y adem´askhk2 =X
e∈E
hh, ei2 =kˆhk22. Definamos U:H → ℓ2(E) por U h = ˆh.U es lineal y tambi´en isometr´ıa. Luego en ranU est´an todas las funcionesf ∈ℓ2(E) tales que f(e) = 0 salvo para una cantidad enumerable de elementos de E; esto quiere decir que ranU es denso. Pero como U es isometr´ıa su rango debe ser cerrado. De este modo,U:H →ℓ2(E) es un isomorfismo.
SiKes un espacio de Hilbert con baseF,Kes isomorfo aℓ2(F). Si dimH= dimK,
E, F tienen la misma cardinalidad y ℓ2(E) debe ser isomorfo a ℓ2(F), luego H, K son isomorfos.
■
Corolario 1.52. Todos los espacios de Hilbert separables de dimensi´on infinita son isomorfos.
Teorema 1.53. Para cadak∈Zdefinimosek(t) =eikt/√2π. Entonces{ek:k∈Z}
es una base ortonormal para L2
C[0,2π].
Demostraci´on. SeaT:= n
X
k=−n
αkek:αk∈C, n≥0
.T es una sub´algebra del ´ alge-bra de todas las funciones continuas con valores complejos en [0,2π], ´esta ´ultima denotada porCC[0,2π]. Note que sif ∈ T entoncesf(0) =f(2π).
Ahora probemos que la clausura de T esC:={f ∈CC[0,2π] : f(0) =f(2π)}. Sea
f ∈ Cy definamosF:T→CporF(eit) =f(t) luegoF es continua, adem´as podemos
encontrar una sucesi´on de polinomios en z y z, {pn(z, z)} donde pn(z, z) → F(z) uniformemente enT. Como la clausura deCen L2C[0,2π] es todo el espacio. De esta
manera, span{en:n∈Z} = L2C[0,2π] y {en} es un conjunto generador, y por el
Ejemplo 1.38 tambi´en es ortonormal, por lo tanto es base de H.
■
Definici´on 1.54(Coeficiente de Fourier). SeaH=L2C([0,2π], µ)un espacio de
Hil-bert donde µ =dt/2π. Sea {en:n∈Z} una base ortonormal de H tal que en(t) = eint. Para cada f ∈ H definimos el n-´esimo coeficiente de Fourier de f como
hf, eni:= 1 2π
2π Z
0
f(t)e−intdt y lo denotamos porfˆ(n).
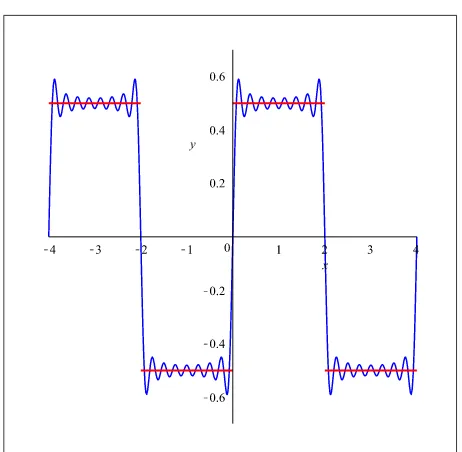
Definici´on 1.55 (Serie de Fourier). La serie
∞
X
n=−∞
ˆ
f(n)en converge en L2C[0,2π] a
Figura 1.4: En rojo funci´on a trozos, en azul serie de Fourier.
Observaci´on 1.56. Si H es un espacio de Hilbert y E es una base para H, los escalares del conjunto{hh, ei:e∈E} son llamados los coeficientes de Fourier de h relativos aE y la serieP{hh, eie:e∈E} es llamada la expansi´on de Fourier de h.
Definici´on 1.57 (Transformada de Fourier). La aplicaci´on U:L2
C[0,2π] →ℓ2(Z)
definida porU f = ˆf es llamada la transformada de Fourier.
La transformada de Fourier define un isomorfismo entre los espacios L2C[0,2π] y
ℓ2(Z), tiene aplicaciones en f´ısica, ingenier´ıa y matem´aticas aplicadas. Su importan-cia en la actualidad se debe a su uso en ´optica, comunicaciones y tecnolog´ıa, por ejemplo, para mejorar la imagen en televisores, c´amaras digitales y para analizar el sonido en motores aeron´auticos y detectar posibles fallas.
Observaci´on 1.58. Para f ∈ L2
C[0,2π] la transformada de Fourier es la funci´on
ˆ
f:Z→C en la Definici´on 1.54.
Teorema 1.59. La transformada de Fourier es una isometr´ıa lineal de L2
C[0,2π]
sobre ℓ2(Z).
Demostraci´on. Sea U:L2C[0,2π] → ℓ2(Z) la transformada de Fourier de f donde
yf, g∈L2
C[0,2π] luego
U(αf+βg) (w) = 2π Z
0
αf(t) +βg(t)e−iwtdt
=α 2π Z
0
f(t)e−iwtdt+β 2π Z
0
g(t)e−iwtdt
=αU(f)(w) +βU(g)(w).
Si{αn}n∈Z∈ℓ2(Z) tal queαn= 0 excepto para una cantidad finita de valores den,
entonces f =
∞
X
n=−∞
αnen∈L2C[0,2π], donde el n-´esimo coeficiente de Fourier ˆf(n)
es αn y adem´as U f = {αn}n∈Z. Luego ranU es denso en ℓ2(Z). Como U es una
isometr´ıa ranU es cerrado yU es sobreyectiva.
Operadores en espacios de
Hilbert
Los resultados presentados en este cap´ıtulo son extra´ıdos de las secciones 1 a 4 del cap´ıtulo 2 de [4].
En el cap´ıtulo anterior vimos que los funcionales lineales acotados son continuos por esto el presente cap´ıtulo se centra en las propiedades del conjunto de los operado-res acotados y se definen algunos tipos de operadooperado-res acotados como los operadooperado-res compactos y los de rango finito. Este cap´ıtulo se centra en probar que el conjunto de los operadores acotados es una C∗-´algebra y que el conjunto de los operadores compactos es un ideal en ´el. Adem´as se prueba la completitud del conjunto de los operadores de rango finito en el conjunto de los operadores compactos por lo cual se tiene que todo operador compacto puede aproximarse por medio de una sucesi´on de operadores de rango finito.
2.1.
Operadores acotados
Definici´on 2.1. SeanH,K espacios de Hilbert yA una transformaci´on lineal deH a K, definimos la norma deA como
kAk:= sup{kAhk:h∈ H,khk<1}.
En la Definici´on 2.1 la norma cumple las equivalencias del Teorema 1.33, adem´as cuando la transformaci´on lineal A sea de norma finita decimos que A es acotada. Denotaremos el conjunto de las transformaciones lineales acotadas de H en K por B(H,K) y cuandoH=K lo escribimos como B(H).
Proposici´on 2.2. Sean H un espacio de Hilbert, en n∈N una base ortonormal de
H y A:H → K una transformaci´on lineal tal que X n∈N
kAenk < ∞ entonces A es
acotada.
Demostraci´on. Por la definici´on de norma, por el Teorema 1.33 y la desigualdad triangular tenemos,
kAk ≤ A
X
n∈N
en =
X
n∈N
Aen ≤
X
n∈N
kAenk<∞.
Por lo tantoAes acotado.
■
Teorema 2.3. Sean H,K y L espacios de Hilbert.
a) Si A, B ∈ B(H,K) entoncesA+B∈ B(H,K) y kA+Bk ≤ kAk+kBk. b) Siα ∈K yA∈ B(H,K) entonces αA∈ B(H,K) y kαAk=|α| · kAk.
c) SiA∈ B(H,K)y B ∈ B(K,L)entoncesBA∈ B(H,L) ykBAk ≤ kBk · kAk. Demostraci´on.
a) Sean A, B∈ B(H,K) yh∈ H entonceskAk=a < ∞ ykBk =b <∞, luego
(A+B)h=kAh+Bhk ≤ kAhk+kBhk ≤ kAk · khk+kBk · khk= kAk+ kBkkhk= (a+b)khkpor lo tantoA+B∈ B(H,K) ykA+Bk ≤ kAk+kBk. b) Si α ∈ K y A ∈ B(H,K) entonces kAk = a < ∞. Sea h ∈ H entonces
kαAhk=|α| · kAk · khk=|α|akhk<∞, por lo tantokαAk ≤ |α| · kAk. c) Sea k ∈ K entonces kBkk ≤ kBk · kkk. Para h ∈ H, k = Ah ∈ K tenemos
kBAhk ≤ kBk · kAhk ≤ kBk · kAk · khk.
■
Definici´on 2.4. Si H,K son espacios de Hilbert, una forma sesquilineal o bilineal es una funci´on u:H × K →K tal que∀h, g ∈ H, ∀k, f ∈ K y ∀α, β∈Kvale que
• u(αh+βg, k) =αu(h, k) +βu(g, k) • u(h, αk+βf) =αu(h, k) +βu(h, f).
Teorema 2.5. Si u:H × K → K es una forma acotada sesquilineal con cota M
entonces existen operadores ´unicosA∈ B(H,K)y B∈ B(K,H) tales queu(h, k) = hAh, ki=hh, Bki para todo h∈ H, k∈ K y kAk,kBk ≤M.
Demostraci´on. Sea k∈ K y definamosLk:=H →K por Lh(k) =u(h, k) entonces
Lh es lineal y |Lh(k)| ≤ Mkhk · kkk, por el Teorema de representaci´on de Riesz 1.34, existe un ´unico vector f ∈ K tal quehk, fi=Lh(k) =u(h, k) ykfk ≤Mkhk. TomemosAh=f entoncesLh(k) =u(h, k) =hk, fi=hk, Ahi, adem´asLh1+h2(k) = u(h1+h2, k) = u(h1, k) + u(h2, k) = hk, f1i+hk, f2i = hk, Ah1i +hk, Ah2i = Lh1(k) +Lh2(k), luegoA es lineal.
Ahora veamos que A es ´unico, para esto supongamos ˆA ∈ B(H,K) yu(h, k) = hAh, kˆ i entonceshAh−Ah, kˆ i= 0 para todo k, por estoAh−Ahˆ = 0 para todo h. Por lo tantoA es ´unico.
De manera an´aloga para demostrar la existencia de B ∈ B(K,H) definimos ˆ
Lk(k) : H → K tal que ˆLk(h) = u(h, k). Por Teorema de Riesz existe g ∈ K que satisface ˆLk(h) =hh, giy tomamos Bk=g y procedemos como se realiz´o la demos-traci´on para A.
■
Definici´on 2.6. Si A ∈ B(H,K) entonces el operador ´unico B ∈ B(K,H) que satisface u(h, k) = hAh, ki = hh, Bki es llamado el adjunto de A y se denota por A∗.
Proposici´on 2.7. Sea U ∈ B(H,K) entonces U es un isomorfismo si y solo si U es invertible yU−1 =U∗.
Demostraci´on. (⇒) Supongamos que U es un isomorfismo entonces U es biyectivo y por esto existe U−1 tal que U U−1 = U−1U = I, adem´as por hip´otesis tenemos
hU h1, U h2i = hh1, h2i. Si tomamos U h1 = k1 y U h2 = k2 entonces hk1, k2i =
hU−1k1, U−1k2i. Ahora, sea h0 = U−1k para alg´un k luego hh, U∗ki = hU h, ki =
hU h, U h0i=hh, h0i ∀h, por lo tantoh0=U−1k=U∗k.
(⇐) Supongamos que U−1 =U∗ entonces, aplicando las propiedades del producto
interno,hU h1, U h2i=hU∗U h1, h2i=hU−1U h1, h2i=hh1, h2i por lo tanto U es un isomorfismo.
■
Proposici´on 2.8. Si A, B ∈ B(H,K) yα ∈K entonces:
a) (αA+B)∗ =αA∗+B∗. b) (AB)∗ =B∗A∗.
d) Si A es invertible en B(H) y A−1 es su inverso entonces A∗ es invertible y
(A∗)−1 = A−1∗.
Demostraci´on. Utilizando propiedades de producto interno, la definici´on de adjunto y el Corolario 1.5, tenemos que para todoh∈ H yk∈ K,
a) hh,(αA+B)∗ki=h(αA+B)h, ki=αhAh, ki+hBh, ki. Pasando a operado-res adjuntos lo anterior es igual ahh, αA∗ki+hh, B∗ki=hh, αA∗k+B∗ki. Por
lo tanto (αA+B)∗=αA∗+B∗.
b) hABh, ki=hBh, A∗ki=hh, B∗A∗ki, luego (AB)∗ =B∗A∗. c) hAh, ki=hh, A∗ki=hA∗∗h, ki, luego A=A∗∗.
d) Sabemos que AA−1 = I = A−1A y tomando adjunto obtenemos AA−1∗ = A−1∗A∗=I∗ =I, de la misma maneraA∗ A−1∗ = A−1A∗=I∗entonces A−1∗= (A∗)−1.
■
Proposici´on 2.9. Si A∈ B(H) entonceskAk=kA∗k=kA∗Ak1/2.
Demostraci´on. Seah ∈ Htal que khk<1 luego kAhk2 =hAh, Ahi =hA∗Ah, hi ≤
kA∗Ahk · khk ≤ kA∗Ak ≤ kA∗k · kAk, as´ıkAk2 ≤ kA∗k · kAkluegokAk ≤ kA∗k. Pero
como A = A∗∗ entonces si sustituimos A por A∗ obtenemoskA∗k ≤ kA∗∗k =kAk por lo tantokA∗k=kAk. De la misma manerakA∗Ak=kAk2=kA∗k2.
■
Definici´on 2.10. SeaA∈ B(H),Aes llamado hermitiano o autoadjunto siA∗=A.
Definici´on 2.11. Si A∈ B(H) es tal que AA∗=A∗A, A es llamada normal.
Proposici´on 2.12. Si H es un espacio de Hilbert complejo y A∈ B(H) entonces A es hermitiana si y solo si hAh, hi ∈R, para todo h∈ H.
Demostraci´on. (⇒) SiA=A∗entonceshAh, hi=hh, Ahi=hAh, hiluegohAh, hi ∈
R.
(⇐) Supongamos hAh, hi ∈ R para todo h ∈ H, luego si α ∈ C y h, g ∈ H
en-tonces hA(h+αg), h+αgi = hAh, hi +αhAh, gi +αhAg, hi +|α|2hAg, gi ∈ R. Podemos decir que la expresi´on anterior es igual a su conjugado complejo, luego comohAh, hi, hAg, gi ∈R, obtenemos la igualdad
Tomando α = 1 tenemos,hAh, gi+hAg, hi = hA∗g, hi +hA∗h, gi, aplicando las
propiedades de producto interno y la linealidad deA resulta
hA(h+g), h+gi=hA∗(h+g), h+gi. (2.1) Tomandoα=i,
−hAh, gi+hAg, hi=hA∗g, hi − hA∗h, gi hA(g−h), h−gi=hA∗(g−h), h−gi
hA(h−g), h−gi=hA∗(h−g), h−gi. (2.2) Sumando las ecuaciones (2.1)y (2.2) tenemos hAh, hi=hA∗h, hi luego por el
Coro-lario 1.5A=A∗.
■
Proposici´on 2.13. Si A=A∗ entonces kAk= sup{|hAh, hi|:khk= 1}.
Demostraci´on. Supongamos M = sup{|hAh, hi|:khk= 1}. Si khk = 1 entonces |hAh, hi| ≤ kAk por lo tanto M ≤ kAk. Por otra parte, si khk= kgk = 1 tenemos hA(h±g), h±gi = hAh, hi ± hAh, gi ± hAg, hi+hAg, gi = hAh, hi ± hAh, gi ± hg, A∗hi+hAg, gi. ComoA=A∗ entonces
hA(h±g), h±gi=hAh, hi ±2RehAh, gi+hAg, gi,
ahora sumando la ecuaci´on anterior correspondiente a la suma con la de la dife-rencia obtenemos, 4RehAh, gi = hA(h+g), h+gi − hA(h−g), h−gi. Adem´as, hAf, fi ≤ kAfk · kfk= kAk · kfk2 ≤Mkfk2 para cualquier f ∈ H. Usando la ley del paralelogramo 1.19 se tiene,
4RehAh, gi ≤M kh+gk2+kh−gk2 = 2M khk2+kgk2= 4M,
pues khk = kgk = 1. Ahora supongamos hAh, gi = eiθ|hAh, gi| y reemplacemos h por e−iθh en la desigualdad anterior luego hAh, gi ≤ M cuando khk = kgk = 1. Tomando el supremo sobre g resulta kAhk ≤M donde khk= 1, tomando supremo sobre khk= 1 tenemos kAk ≤M.
■
Corolario 2.14. Si A=A∗ yhAh, hi= 0 para todo h∈ H entonces A= 0.
Demostraci´on. Sabemos que kAk = sup{|hAh, hi|:khk= 1} por Proposici´on 2.13, luego por hip´otesis kAk= 0 por lo tanto A= 0.
Definici´on 2.15. Sea H un espacio de Hilbert y A ∈ B(H). Note que A=B+iC dondeB = (A+A∗)/2 y C= (A−A∗)/2i son autoadjuntos. B y C se llaman las partes real e imaginaria deA.
Proposici´on 2.16. Si H es un espacio de Hilbert complejo y A ∈ B(H) tal que hAh, hi= 0 para todo h∈ H entonces A= 0.
Demostraci´on. Sea A ∈ B(H), luego existen B, C tales que A = B+iC entonces hAh, hi=h(B+iC)h, hi=hBh, hi+ihCh, hi. Ahora veamos queB yCson el ope-rador nulo, para esto tomemoshBh, hi= 12h(A+A∗)h, hi= 12hAh, hi+hA∗h, hi= 1
2hAh, hi+hAh, hi = 0, pues hAh, hi = 0 entonces como B = B∗ por el Corolario 2.14,B =B∗ = 0. De manera an´aloga podemos concluir que C = C∗ = 0. Por lo tantoA= 0.
■
Proposici´on 2.17. Si A∈ B(H) los siguientes enunciados son equivalentes: a) A es normal (A∗A=AA∗).
b) kAhk=kA∗hk para todo h∈ H.
Si Hes un espacio de Hilbert complejo entonces los anteriores enunciados son equivalentes a:
c) Las partes real e imaginaria de A conmutan.
Demostraci´on. (a⇔b) Si h∈ H entonces
kAhk2− kA∗hk2 =hAh, Ahi − hA∗h, A∗hi=hA∗Ah−AA∗h, hi. ComoA∗A−AA∗ = 0 se tienekAhk=kA∗hk.
(a⇔c) SiB yC son las partes real e imaginaria seA entoncesA∗A=B2−iCB+ iBC+C2 y AA∗ = B2 +iCB−iBC+C2 por lo tanto A∗A = AA∗ si y solo si CB=BC.
■
Teorema 2.18. Si A∈ B(H) entonceskerA= (ranA∗)⊥.
Demostraci´on. Sean k ∈ kerA y h ∈ H entonces hk, A∗hi = hAk, hi = h0, hi = 0, luego kerA ⊂ (ranA∗)⊥. Para demostrar la otra inclusi´on tomamos k∈ (ranA∗)⊥ yh ∈ H entonceshAk, hi= hk, A∗hi = 0, luego Ah = 0, por lo tanto (ranA∗)⊥
⊂ kerA.
■
2.2.
Idempotentes y proyecciones
Definici´on 2.20. Un idempotente sobre H es un operador lineal acotado E sobre H tal queE2 =E.
Definici´on 2.21. Una proyecci´on es un idempotente P tal que kerP = (ranP)⊥.
Proposici´on 2.22.
a) E es un idempotente si y solo siI−E es un idempotente.
b) SiE es un idempotente entonces se cumple queranE= ker (I−E),y tambi´en kerE = ran (I−E). Adem´as se tiene quekerE,ranE son subespacios lineales cerrados deH.
c) Sea E un idempotente. Si M= ranE y N = kerE entoncesM ∩ N ={0} y M+N =H.
Demostraci´on.
a) Sea E un idempotente luego (I−E)2 =I −2E+E2 =I −2E+E =I −E por lo tanto I−E es idempotente.
b) Tenemos 0 = (I −E)h=h−Ehluego ker (I−E)⊂ranE. Por otra parte, si h∈ranEluegoh=Egpara alg´ung∈ Hpor lo tantoEh=E2g=Eg=h, es decir ranE = ker (I−E) y de manera similar obtenemos kerE = ran (I−E). c) Sea h ∈ M ∩ N, luego h ∈ ranE = ker (I−E) por lo cual (I−E)h = h−Eh= 0, es decir, h=Eh. Ahora comoh ∈kerE = ran (I−E) entonces Eh= 0 lo cual implica Eh=h= 0 por lo tanto M ∩ N ={0}. Supongamos ahora h ∈ H luego h = (h−Eh) +Eh donde h−Eh ∈ kerE y Eh ∈ ranE por lo tanto H= kerE+ ranE.
■
Proposici´on 2.23. Si E es un idempotente sobre H y E 6= 0 los siguientes enun-ciados son equivalentes:
a) E es una proyecci´on.
b) E es la proyecci´on ortogonal de Hen ranE. c) kEk= 1.
d) E es hermitiana.
f ) hEh, hi ≥0 para todo h∈ H.
Demostraci´on. (a⇒b) SeanM= kerEyP =PMla proyecci´on sobreM. Sih∈ H
entonces, por Teorema 1.23, P h es el ´unico vector en M tal que h−P h ∈ M⊥ =
(ranE)⊥= kerE. Sabemos queh−Eh= (I−E)h∈kerE. As´ı por la unicidad de P se tiene queEh=P h.
(b⇒c) Tenemos quekEk ≤1, adem´as para todoh ∈ranE se tieneEh =h luego, por Teorema 1.33,kEk= 1.
(c ⇒ a) Sabemos que kerE = ran (I−E) entonces h−Eh ∈ kerE, as´ı 0 = hh− Eh, hi = khk2 − hEh, hi. Adem´as hEh, hi ≤ kEhk · khk ≤ khk2, luego para h ∈ (kerE)⊥ se tiene kEhk = khk = hEh, hi12. Por lo anterior, kh−Ehk2 = khk2 − 2RehEh, hi = kEhk2 = 0, es decir, (kerE)⊥
⊂ ker (I−E) = ranE. Por otra parte, si g ∈ ranE con g = g1 +g2 donde g1 ∈ kerE y g2 ∈ (kerE)⊥. Luego g = Eg = Eg2 = g2 entonces ranE ⊂ (kerE)⊥ por lo cual ranE = (kerE)⊥, es decir,E es una proyecci´on.
(a ⇒ d) Sean h, g ∈ H con h = h1 +h2 y g = g1 +g2 donde h1, g1 ∈ ranE y h2, g2 ∈kerE= (ranE)⊥. Ahora,hEh, gi=hh1, g1+g2i=hh1, g1ipueshh1, g2i= 0. Por otra parte,hE∗h, gi=hh, Egi=hh1, g1i=hEh, gi entoncesE∗ =E.
(d⇒e) Sean h, g ∈ H luego comoA es hermitiana tenemos hAA∗h, gi=hA∗h, A∗gi=hAh, Ahi=hA∗Ah, gi.
(e⇒a) Sabemos por Teorema 2.17 que siE es normal entonceskEhk=kE∗hkpara todoh∈ H. As´ı kerE = kerE∗ y adem´as por Teorema 2.18, kerE∗= ranE⊥ por lo tantoE es una proyecci´on.
■
2.3.
Operadores compactos y de rango finito
Definici´on 2.24. Si T:H → K es una transformaci´on lineal tal que para la bola unitariaD de H, se cumple que T(D) tiene clausura compacta en K decimos que T
es compacto.
La definici´on anterior es equivalente a decir queT env´ıa un conjunto acotado en uno precompacto.
Notaremos el conjunto de los operadores compactos deH en K por B0(H,K), y cuandoH=K porB0(H).
Proposici´on 2.25. SeanH, Kespacios de Hilbert entonces se cumplen los siguien-tes enunciados:
b) B0(H,K) es un espacio lineal.
c) Si {Tn}n∈N ⊂ B0(H,K) y T ∈ B(H,K) tal que kTn− Tk → 0 entonces
T ∈ B0(H,K).
d) Si A∈ B(H), B ∈ B(K) y T ∈ B0(H,K) entoncesT A, BT ∈ B0(H,K).
Observaci´on 2.26. Como resultado de esta proposici´on tenemos que:
• El conjunto B0(H,K) es cerrado en B(H,K) por el inciso c.
• El conjuntoB0(H,K) es un ideal de B(H,K) por los incisosby d. Por lo an-terior, el cocienteB(H,K)/B0(H,K) es un ´algebra, la cual es llamada ´algebra de Calkin.
Demostraci´on.
a) Sea T ∈ B0(H,K) entonces para toda bola D en H se tiene que cl T(D) es compacto en K. Por esto, existe una constante c > 0 tal que T(D) ⊂
{k∈ K:kkk ≤c}, as´ıkTk ≤c.
b) Veamos queB0(H,K) es un espacio vectorial. Sea Oel operador nulo entonces O(h) = 0 para todo h ∈ H y por esto O ∈ B0(H,K). Ahora supongamos T1, T2 ∈ B0(H,K) entonces para cualquier bola D de H se tiene T1(D) ⊂
{k∈ K:kkk ≤c1} yT2(D)⊂ {k∈ K:kkk ≤c2} por lo tanto (T1+T2) (D)⊂
{k∈ K:kkk ≤c1+c2 ≤ ∞}es decirT1+T2∈ B0(H,K). Por ´ultimo, tomemos α ∈ K y T ∈ B0(H,K) entonces αT(D) ⊂ {k∈ K:kkk ≤αc}, luego αT ∈
B0(H,K).
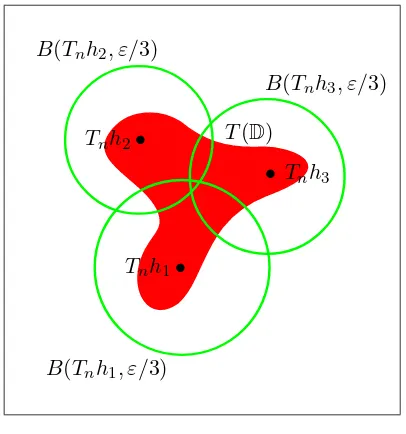
c) ComoKes un espacio m´etrico completo, el hecho de queT(D) sea totalmente
acotado es equivalente a tener que la clausura deT(D) es compacta. Seanε >0
y n ∈ N tal que kTn−Tk < ε/3, ahora como Tn es un operador compacto
existen vectoresh1, h2, . . . , hm ∈D tales queTn(D) ⊂ m S
j=1
B(Tnhj, ε/3) donde B(Tnhj, ε/3) es la bola de centro Tnhj y radio ε/3 (ver Figura 2.1). Luego si khk ≤1 entonces existe un hj tal quekTnhj−Tnhk< ε/3. As´ı,
kT hj−T hk ≤ kT hj −Tnhjk+kTnhj−Tnhk+kTnh−T hk <2kT −Tnk+ε/3< ε.
Por lo tantoT(D)⊂
m S
j=1
B(T hj, ε).
d) SeaDKuna bola enK. ComoB ∈ B(K) entoncesB(DK) es un conjunto acotado
enKy adem´asB T(DH)⊂clB T(DH)) luegoBT ∈ B0(H,K). De la misma
manera tomemos DH una bola en H entonces T A(DH) ⊂ T kAkDH ⊂
■
• Tnh3 Tnh2•
Tnh1•
T(D)
B(Tnh3, ε/3)
[image:44.612.175.378.142.359.2]B(Tnh1, ε/3) B(Tnh2, ε/3)
Figura 2.1: Ilustraci´on Teorema 2.25.
Definici´on 2.27. Sea T un operador de H en K tal que ranT es de dimensi´on finita, decimos queT es de rango finito.
Observaci´on 2.28. Notaremos el conjunto de los operadores de rango finito de H enK porB00(H,K) y porB00(H) cuandoH=K.
La siguiente proposici´on nos dice que un operador compacto puede aproximarse por operadores de rango finito.
Teorema 2.29. Si T ∈ B(H,K) los siguientes enunciados son equivalentes: a) T es compacto.
b) T∗ es compacto.
c) Existe una sucesi´onTn n∈N de operadores de rango finito tal quekTn−Tk → 0.
Demostraci´on. (c⇒a) ComoB00(H,K)⊂ B0(H,K) por Teorema 2.25 inciso b, se cumple queT es compacto.
(a⇒c) Como cl T(D) es compacto entonces es separable, y as´ı cl ranD es