12º CONGRESSO IBEROAMERICANO DE ENGENHARIA MECANICA
Guayaquil, 10 a 13 de Novembro de 2015
Sistema Móvel Autônomo de Inspeção Termográfica e Visual
em Subestações de Energía Elétrica
Gomes, S.C.¹; Dias, G.V.²; Silva, B.P.A.²; Porto, M.P.³; Andrade, R.M.³
¹Programa de Pós Graduação em Engenharia Mecânica, Universidade Federal de Minas Gerais–UFMG, email:
²Programa de Graduação em Engenharia Mecânica, Universidade Federal de Minas Gerais–UFMG, email:
[email protected];[email protected]
³Professor do Departamento de Engenharia Mecânica, Universidade Federal de Minas Gerais–UFMG, email:
[email protected];[email protected]
Área Temática: Ciências Aplicadas à Engenharia Mecânica
RESUMO
Em subestações de energia elétrica são realizadas inspeções periódicas para avaliação do estado geral de operação dos componentes instalados. A termografia, técnica de medição de temperatura sem contato, é empregada nas inspeções destes componentes para avaliação de seu perfil térmico. No entanto, devido à questões financeiras e de disponibilidade de material e de pessoal, estas inspeções não são realizadas com a frequência desejável, o que prejudica registro de dados destes componentes e a avaliação do histórico do seu funcionamento. Visto isso, o objetivo deste trabalho é apresentar detalhes do projeto do protótipo de um sistema móvel autônomo de inspeção visual e termográfica em subestações. O sistema foi idealizado para se locomover sobre trilhos e realizar inspeções diárias nos componentes da subestação. A estrutura de trilhos foi instalada em laboratório para verificação e validação do sistema. Os resultados apontam que o sistema está pronto para instalação e operação em campo.
INTRODUÇÃO
A inspeção em componentes de subestação elétrica é uma prática regular dentre as atividades de manutenção do setor elétrico. Através da inspeção, que pode ser termográfica e visual, são coletadas informações relevantes sobre o estado de operação dos componentes. Estes dados são processados para que seja feita a emissão do diagnóstico do ativo, e de uma eventual indicação de reparo.
Devido à grande demanda de serviços, custos envolvidos e possíveis riscos à saúde do operador, estas inspeções podem ocorrer com uma frequência menor que o desejável. O monitoramento dos componentes é fundamental para obtenção de informações sobre o histórico de operação, pois estes dados são utilizados pelo gestor de manutenção no planejamento das intervenções necessárias. Diniz [1] estima que um terço das intervenções de manutenção preventiva sejam desnecessárias, já que, muitas vezes, o componente se encontra em plenas condições de operação.
Kardec [2] apontam que a atividade de manutenção vem sofrendo mudanças, exigindo ações, ferramentas e atitudes inovadoras, exigindo maior ênfase em questões de segurança, meio ambiente, qualidade e confiabilidade. Isso tudo, é claro, aliado a redução de custos. Diante deste panorama, a proposta de monitoramento autônomo de uma subestação, é uma proposta ousada e promissora.
Este trabalho apresenta detalhes do projeto e da construção de um Sistema móvel autônomo de inspeção que tem a missão de apresentar uma alternativa para aumentar a frequência de inspeções termográficas dos componentes de uma subestação de energia elétrica. Um protótipo foi construído e testado em laboratório. Este sistema foi desenvolvido pelo Laboratório de Termometria da UFMG, a partir do P&D-426, realizado com apoio da CEMIG/ANEEL.
ROBÔS DE INSPEÇÃO
Diversos grupos de pesquisa, geralmente ligados à atividade de manutenção, trabalham com a proposta de monitoramento de ativos feito por robôs ou unidades automatizadas. A justificativa para o desenvolvimento deste tipo de sistema inclui argumentos comuns a todos os grupos, como economia de custos, qualidade das informações registradas e segurança de operação.
Okamoto [3] mostra as características de um robô de monitoramento de corrosão nos cordões de soldas de esferas de armazenamento de gás. O robô possui rodas de material magnético, que garantem a adesão do robô a superfície da esfera, um conjunto de câmeras digitais, e sensores que detectam o cordão de solda. Os dados são enviado para uma base de dados, via wifi. A Figura1 mostra uma imagem do robô sobre uma esfera.
Pinto [4] desenvolveu um sistema para o monitoramento de pontos quentes (hot-spots). A procura por pontos quentes norteia as inspeções termográficas de caráter qualitativo. Quando o sistema detecta um hot-spot, uma mensagem é enviada para a sala de controle. A partir daí, atitudes são tomadas para eliminar o problema. O robô se move sob um cabo de aço, posicionado ao longo da borda lateral da subestação. O sistema é composto por uma câmera termográfica, um conjunto de rodas e motor, para movimentação ao longo do cabo de aço, e o conjunto eletrônico auxiliar, responsável pela transmissão de dados e controle do sistema. A sua alimentação é feita por um cabo, energizado com 220V, que o acompanha constantemente. A Figura 2 apresenta uma imagem do robô instalado em uma subestação.
Fig. 2–Vista do robô durante uma inspeção. Fonte: Pinto [4]
Wang [6] apresenta uma alternativa para o monitoramento de subestações, o SmartGuard. Desenvolvido pela Shandong Electric Power Research Institute, sediado em Jinan, na China, o SmartGuard se move por trajetos pavimentados dentro da subestação. As informações coletadas são enviadas para uma central de dados, onde é feita a análise e gerada as ordens de manutenção. A alimentação é feita por bateria. O sistema foi programado para retornar a um ponto específico dentro da subestação, onde será realizado o acoplamento automático à estrutura de recarga da bateria. Os estudos envolvendo o SmartGuard são desenvolvidos desde 2004. A Figura 3 apresenta uma imagem de uma das versões do robô em operação.
Fig. 3–SmartGuard. Fonte: Wang [5]
SISTEMA AUTÔNOMO DE INSPEÇÃO
Pensando em uma alternativa onde fosse possível operar mais próximos dos alvos de inspeção foi feito um estudo para avaliar a possibilidade de utilizar trilhos suspensos para movimentação do robô autônomo. Para trabalhar de forma efetiva com esta solução, seria necessário que o sistema operasse com alimentação pelos trilhos, para evitar o uso de cabos e baterias, aumentando a segurança da instalação. Após a análise das alternativas encontradas, a equipe de desenvolvimento foi encarregada de apresentar propostas para a construção de um sistema de inspeção inovador, que atendesse a realidade das subestações brasileiras.
O Sistema autônomo de inspeção foi desenvolvido com o objetivo primário de aumentar a frequência de inspeções dos componentes de subestação, se deslocando através de uma estrutura de trilhos suspensos e, a partir da inspeção, diagnosticar os componentes sem a necessidade da intervenção humana. Diversos módulos operacionais compõe o veículo de inspeção. A Figura 4 apresenta o diagrama com a estrutura de organização básica, composta pelos módulos:
Controle: comanda os módulos de movimentação e de inspeção;
Inspeção: realizam o registro das imagens digitais e térmicas;
Estrutura de movimentação: responsável pelo deslocamento sobre os trilhos;
Estrutura de fixação: fixam os trilhos na parede da subestação.
Fig. 4–Diagrama de módulos do Sistema Autônomo de Inspeção
A Figura 5 apresenta um esboço da estrutura de movimentação e fixação, que serviu de base para concepção do projeto definitivo. A estrutura é composta por quatro elementos básicos:
mão francesa: para fixação da estrutura
suporte: elemento de fixação dos trilhos à mão francesa
espaçador: garante a distância adequada e o isolamento elétrico entre as barras
trilhos: caminho para locomoção do robô, condução da energia elétrica e trafego de dados
Construção do Protótipo
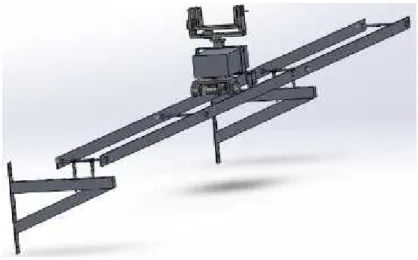
Para a definição do projeto e construção da estrutura, foram feitas pesquisas de mercado para avaliar os materiais disponíveis, considerando suas características mecânicas, preço e aplicabilidade. A eletricidade é transmitida à Unidade Móvel pelos trilhos e nesse caso foram utilizadas barras de alumínio, que são mais leves que as de aço, conduzem melhor e não oxidam com o tempo. O tráfego de dados e acesso remoto à Unidade móvel também são feitos pelos trilhos. Os espaçadores foram construídos com material de fibra de vidro. Os suportes e as mãos francesas foram construídos com aço, que são resistentes e de baixo custo. Após a seleção destes materiais, foi construído um modelo em SolidWorks® do sistema, que serviu para orientar testes de deslocamento e orientação da construção da estrutura. A Figura 6 apresenta este modelo.
Fig. 6 - Modelo do Sistema Autônomo de Inspeção
Uma estrutura de trilhos om 4m de extensão foi construída e afixada no Laboratório de Termometria da UFMG para realização de testes, ajustes e validação do Sistema de Inspeção Autônomo. Na unidade móvel, uma caixa para isolamento eletromagnética contém o módulo de controle e diagnóstico. A locomoção da unidade móvel é feita por dois motores de corrente contínua acoplados a rodas de nylon. Outras duas rodas metálicas servem de contato elétrico com os trilhos. Para movimentação das câmeras utiliza-se um sistema Pan/Tilt. Duas câmeras, uma digital e uma termográfica, compõem o módulo de diagnóstico. A FIG.7 apresenta uma imagem da estrutura instalada.
Inspeção e Diagnóstico
A Unidade Móvel comporta duas câmeras: uma digital e uma termográfica. Isto é necessário para o procedimento de reconhecimento dos componentes, que utiliza algoritmos computacionais de análise de imagem digital. Além disso, ambas as câmeras podem ser utilizadas para inspeção patrimonial. A câmera termográfica, uma FLIR® A315, registra imagens no espectroinfravermelho, de 7,5 μm a 13μm. Um software de diagnóstico foi embarcado, de forma que quando a inspeção termográfica detectar alguma anomalia térmica será gerado um relatório com a indicação do problema. Estes relatórios são enviados para os gestores da manutenção, que irão tomar a decisão sobre a necessidade ou não da intervenção. A FIG.8 apresenta a imagem da Unidade Móvel no intervalo de manutenção.
Fig. 8–Detalhe da Unidade Móvel com as duas câmeras
O Sistema Autônomo de Inspeção foi testado no LabTerm. Os testes de deslocamento e transmissão de dados ocorreram foi bem sucedidos. Alguns ajustes mecânicos e de software foram necessários ao longo dos testes. Uma carcaça de acrílico será construída e adaptada para que a Unidade Móvel seja instalada na subestação. A Figura 9 apresenta imagens registradas pelo sistema durante os testes.
CONCLUSÕES
Após a conclusão do projeto, o protótipo do Sistema Autônomo de Inspeção foi construído e instalado no Laboratório de Termometria da UFMG. Os testes preliminares mostraram que o sistema opera conforme o previsto: com a locomoção, alimentação e transmissão de dados sendo feita através dos trilhos metálicos. Espera-se que após a instalação em uma subestação de energia elétrica, inspeções diárias programadas Espera-sejam realizadas e o histórico do comportamento térmico dos componentes registrados.
A proposta de instalação de um sistema autônomo para inspeção em subestações de energia elétrica é ousada e inovadora. Com a informação gerada pelo monitoramento diário dos equipamentos, será possível avaliar, de forma precisa, seu estado de funcionamento e programar a intervenção no tempo adequado, economizando custos e otimizando o trabalho das equipes de manutenção.
REFERÊNCIAS
1.
DINIZ, H. E. P. Termografia Quantitativa como Ferramenta de Gestão de Ativos do Sistema
Elétrico de Potência. Dissertação de mestrado, Departamento de Engenharia Mecânica da
UFMG, 2013.
2.
KARDEC, A.; Manutenção - Função Estratégica. 2a. ed. Rio de Janeiro, BRA:
QUALITYMARK, 1998.
3.
OKAMOTO, J.; Development of an Autonomous Robot for Gas Storage Spheres Inspection.
Journal of Intelligent and Robotic Systems, V. 66, p. 23
–
35, 2012
4.
PINTO, J.; Mobile robot for hot spot monitoring in electric power substation. Transmission
and Distribution Conference and Exposition, Chigago, p. 1- 5, 2008
5.
WANG, B.; SmartGuard: An Autonomous Robotic System for Inspecting Substation
Equipment. Journal of Field Robotics, V. 29, p. 123
–
137, 2012
NOMENCLATURA
ANEEL–Agência Nacional de Energia Elétrica
CEMIG–Companhia Energética de Minas Gerais
LabTerm–Laboratório de Termometria da Universidade Federal de Minas Gerais
![Fig. 1 – Robô de inspeção em esfera de armazenamento de gás. Fonte: Okamoto [3]](https://thumb-us.123doks.com/thumbv2/123dok_es/6680979.249165/2.892.114.815.60.178/fig-robô-inspeção-esfera-armazenamento-gás-fonte-okamoto.webp)
![Fig. 3 – SmartGuard. Fonte: Wang [5]](https://thumb-us.123doks.com/thumbv2/123dok_es/6680979.249165/3.892.335.625.373.584/fig-smartguard-fonte-wang.webp)