ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL
“A
DOLFO LÓPEZ MATEOS
”
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
CONTROL DIFUSO PARA LA ESTABILIDAD
DE UN SISTEMA ELÉCTRICO DE POTENCIA
T
ESIS
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO ELECTRICISTA
PRESENTA:
S
OTELO
L
EÓN
R
AÚL
D
ELFINO
A
SESORES
:
M.
EN
C.
Y
ORAM
A
STUDILLO
B
AZA
M. EN C. NICOLÁS RODRÍGUEZ PEREYRA
I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL
“A
DOLFO LÓPEZ MATEOS
”
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
C
ARTA CESIÓN DE DERECHOSEn la Ciudad de México, D.F. el día 16 de Noviembre del año 2012 el que suscribe C.. RRaaúúll D
Deellffiinnoo SSootteelloo LLeeóón alumno del programa de Ingeniería Eléctrica con numero de boleta n
2007301305 adscrito al departamento de Ingeniero Eléctrica de la E.S.I.M.E. Unidad Zacatenco, manifiesto que es autor intelectual del presente trabajo de tesis bajo la dirección del M. en C. Yoram Astudillo Baza y el M. en C. Nicolás Rodríguez Pereyra y cede los derecho del trabajo intitulado: CCoonnttrrooll DDiiffuussoo ppaarraa llaa EEssttaabbiilliiddaadd ddee uunn SSiisstteemmaa E
Ellééccttrriiccoo ddee PPootteenncciiaa al Instituto Politécnico Nacional para su difusión, con fines académicos y de investigación.
Los usuarios de la información no deben reproducir el contenido textual, graficas o datos del trabajo si el permiso expreso del autor y/o director del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección: [email protected].
Si el permiso se otorga el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.
AGRADECIMIENTOS
Son diversas las personas a las que ambiciono agradecer y corresponder su apoyo, respaldo y compañía en la culminación de mis estudios superior.
M
Mi
i
Gr
G
ra
at
ti
it
tu
ud
d:
:
Especialmente mis padres; RRaaúúl y l MMaarrííaa ddeell CCaarrmmeen por su apoyo y ánimo absoluto, mis n
hermanas y familiares por su compañía en todo este tiempo.
Mi admiración y respeto hacia el MM.. eenn.. CC.. YYoorraamm AAssttuuddiilllloo BBaazzaa por su apoyo y sus tutorías, no sólo en la elaboración de este trabajo, sino también a lo largo de mis estudios profesionales, le expreso mis agradecimientos.
Por este medio también quiero agradecer al MM.. eenn CC.. NNiiccoollááss RRooddrríígguueezz PPeerreeyyrraa, por su colaboración en esta tesis, principalmente por su ayuda en la realización y culminación de los programas implementados en ella, expreso mi gratitud hacia él.
C
ONTENIDO
NÚMERO TEMA PÁGINA
Lista de figuras VII
Lista de tablas IX
Nomenclatura X
Capítulo I. Generalidades
1.1 Introducción 1
1.2 Justificación 2
1.3 Objetivo general 4
1.4 Planteamiento del problema 4
1.6 Contenido de la tesis 5
Capítulo II. Estabilidad de un Sistema Eléctrico de Potencia
2.1 Conceptos básicos 8
2.2 Estabilidad de un sistemas eléctricos de potencia (SEP) 12
2.3 Ecuación de movimiento de un generador 13
2.4 Estabilidad transitoria 18
2.5 Estabilidad angular 22
2.5.1 Estabilidad de señal pequeña 22
2.5.2 Estabilidad angular en un sistema Maquina-bus infinito 23
2.6 Control de las oscilaciones de potencia 25
2.7 Estabilidad de las tensiones 26
2.7.1 Descripción del fenómeno 27
2.7.2 Metodología de análisis 28
Capítulo III. Control Difuso
3.1 Introducción 32
3.2 Teoría de la lógica difusa 34
3.3 Control difuso 36
3.4 Estructura de un control difuso 38
3.4.1 Proceso de difusificación 38
3.4.2 Base del conocimiento 41
3.4.3 Inferencia difusa 42
3.4.4 Proceso de dedifusificación 45
NÚMERO TEMA PÁGINA Capítulo IV. Controlador Difuso
4.1 Introducción 51
4.2 Datos para la simulaciones 52
4.3 Datos para la evaluación de la lógica difusa 53
4.4 Simulación de los reguladores (CLD y ST1) 55
4.4.1 Simulación de un sistema máquina bus-infinito con una potencia activa de 0.75 p.u.
56
4.4.2 Simulación de un sistema máquina bus-infinito con una potencia activa de 0.80 p.u.
62
4.5 Análisis de resultados 68
4.5.1 Análisis para el caso P=0.75 p.u. 68
4.5.2 Análisis para el caso P=0.80 p.u. 69
Capítulo V. Análisis de Resultados y Conclusiones
5.1 Conclusiones 71
5.2 Recomendaciones 71
5.2 Trabajos futuros 72
Referencias 74
Anexo I Sistema de prueba 77
Anexo II Teoría de conjuntos difusos 86
Anexo III Índice de error de desempeño 93
L
ISTA DE FIGURAS
FIGURA DESCRIPCIÓN PÁGINA
2.1 Sistema de estabilidad frente a la potencia de operación. 10
2.2 Sistema de dos estados. 11
2.3 Estabilidad en sistemas de potencia. 13
2.4 para hidrogeneradores. 15
2.5 turbogeneradores. 16
2.6 Potencia eléctrica en función del ángulo. 18
2.7 Maquina y barra infinita 20
2.8 Oscilación angular del rotor. 21
2.9 Esquema de un limitador de campo. 29
3.1 Partición del dominio de la temperatura en tres conjuntos difusos. 32
3.2 Estado convencional y difuso. 35
3.3 Funciones de membresía. 36
3.4 Sistema de control de lógica difusa. 38
3.5 Generación de valores difusos. 38
3.6 Tipos de funciones de membresia: (a) Función- ; (b) Función-S; (c) Función-L; (d) Función-Λ; (e) Función de Gaussiana; (f) Función-Π.
40
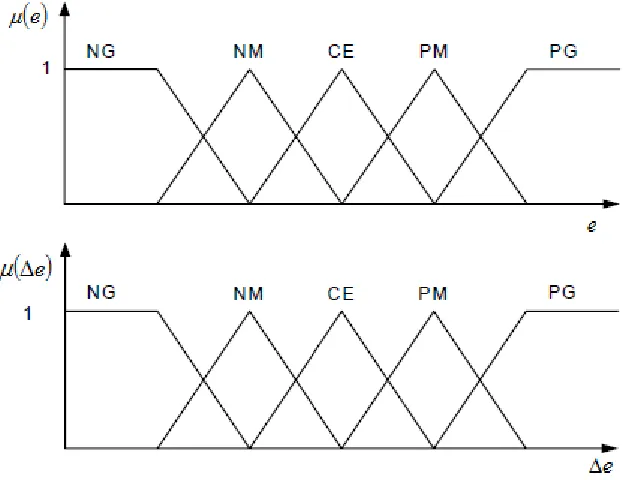
3.7 Siete ventanas de entradas de conjuntos difusos para error y tasa de cambio de error .
41
3.8 Estructura tabular de una regla base lingüística difusa. 42
3.9 Evaluación de reglas. 43
3.10 Siete conjuntos difusos: ventana de salida para la señal de control. 43
3.11 Generación de valores reales. 45
3.12 Recortes de la ventana difusa debido a la inferencia difusa. 46 3.13 Partición de las funciones de membresía del espacio de entrada. 48 3.14 Cada regla define el valor de salida para un punto o zona en el
espacio de entrada.
48
3.15 La lógica difusa interpola entre valores constantes. 49
4.1 Diagrama del sistema maquina bus-infinito. 51
4.2 Excitador IEEE tipo ST1. 52
4.3 Diagrama del CLD. 52
4.4 Sistema de estudio. 53
4.5 Funciones de membresía del error y error. 54
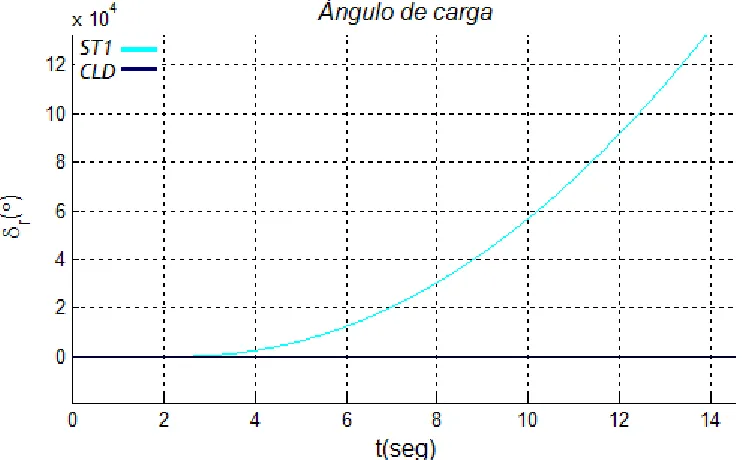
4.6 Comportamiento del ángulo de carga. 56
4.7 Comportamiento de la potencia activa. 56
FIGURA Descripción PÁGINA
4.9 Comportamiento del voltaje en terminales. 57
4.10 Comportamiento del voltaje de campo. 58
4.11 Comportamiento del voltaje de excitación limitándolo. 58 4.12 Grafica del índice de funcionamiento del ángulo de carga. 59 4.13 Grafica del índice de funcionamiento de voltaje en terminales. 59
4.14 Gráfica del error. 60
4.15 Gráfica del cambio de error. 60
4.16 Diagrama de fase-tiempo. 61
4.17 Comportamiento del ángulo de carga. 62
4.18 Comportamiento de la potencia activa. 62
4.19 Comportamiento del la potencia reactiva. 63
4.20 Comportamiento del voltaje en terminales. 63
4.21 Comportamiento del voltaje de campo. 64
4.22 Comportamiento del voltaje de excitación limitándolo. 64 4.23 Gráfica del índice de funcionamiento del ángulo de carga. 65 4.24 Gráfica del índice de funcionamiento de voltaje en terminales. 65
4.25 Gráfica del error. 66
4.26 Gráfica del cambio de error. 66
4.27 Diagrama de fase-tiempo. 67
I.1 Diagrama de bloques del gobernador de velocidad mecánico-hidráulico.
78
I.2 Diagrama de bloque del regulador ST1. 78
I.3 Diagrama del sistema maquina-bus infinito usado en esta tesis. 80 I.4 Diagrama vectorial de la maquina síncrona para determinar el
ángulo de carga , en caso subtransitorio.
82
II.1 Conjunto nítido de temperatura media. 87
II.2 Conjunto difuso de temperatura media. 87
II.3 Acumulación de conjuntos difusos de temperatura baja y media. 88
II.4 Unión e intersección de funciones. 89
II.5 El complemento del conjunto difuso M. 90
L
ISTA DE TABLAS
TABLA DESCRIPCIÓN PÁGINA
3.1 Breve historia de la tecnología difusa. 33
3.2. Proyectos exitosos de control difuso. 34
4.1 Etiquetas utilizadas para y . 54
4.2 Tabla de reglas con 25 reglas sintonizada manualmente. 54
4.3 Tabla de membresías y singletons. 55
N
OMENCLATURA
Tiempo inicial, tiempo
Orden de un sistema cualquiera (numero de ecuaciones o variable) Variables de estado (independiente)
Variable de control o entrada (variables independientes)
Vector de salida
Vector de funcione no lineales Vector de estado
Vector de entradas
Describe la estructura del sistema
Condiciones iniciales del sistema
Vector de estado en el punto de equilibrio
Tolerancia del tensión Dominio de estabilidad Variable de estado inicial Potencia mecánica
Potencia eléctrica Torque amortiguado Potencia acelerante
Posición angular del rotor (radianes eléctricos) Angulo del rotor
Numero de pares de polos Corriente
Energía, energía inicial
Velocidad angular (rad*s) Constante de la maquina Momento angular (inercia) Constante de inercia
Tiempo de arranque o constante de aceleración Potencia aparente
Tensión Admitancia Impedancia Reactancia
Error
Tasa de cambio
Perturbaciones en el tiempo t
tensión transitoria en el eje cuadratura
Corrientes en eje directo y cuadratura
Coeficiente de amortiguamiento Deslizamiento
Torque eléctrico y mecánico
Tensión del bus
Tensión en el eje directo y cuadratura
Tensión del campo Tensión terminal.
Reactancia en el eje directo y cuadratura Reactancias transitorias
Reactancia del sistema de transmisión
Resistencia de armadura
Resistencia del sistema de transmisión
Frecuencia síncrona (velocidad angular) Potencia en la compuerta de la válvula Potencia de alta presión
Constante de tiempo transitorio en eje directo Constante de tiempo subtransitorio en eje directo Constante de tiempo subtransitorio en eje cuadratura Constante de tiempo de recalentamiento
C
APÍTULO
I
GENERALIDADES
1.1.
INTRODUCCIÓN
Cuando los generadores de corriente alterna eran accionados por máquinas de vapor, uno de los problemas fundamentales de servicio era el de las oscilaciones. Las variaciones periódicas en el par aplicado a los generadores, originaba variaciones periódicas de velocidad. Las variaciones periódicas resultantes en la tensión y la frecuencia se transmitían a los motores conectados al sistema. Las oscilaciones de los motores, originadas por las variaciones de tensión y frecuencia, ocasionaban que, a veces, perdieran completamente el sincronismo, si su frecuencia natural de oscilación coincidía con la frecuencia de oscilación originada por las máquinas de accionamiento de los generadores. Se utilizaron primeramente arrollamientos amortiguados con el fin de reducir al mínimo la oscilación, aprovechando la acción amortiguadora de las pérdidas originada por las corrientes inducidas en dichos arrollamientos, por cualquier movimiento relativo entre el rotor y el campo giratorio establecido por la corriente en el inducido. El empleo de las turbinas ha reducido el problema de la oscilación, aunque todavía subsiste cuando el accionamiento se realiza con un motor diesel. Sin embargo, el mantenimiento del sincronismo entre las diversas partes de un sistema de energía se hace cada vez más difícil a medida que crecen los sistemas y sus interconexiones.
La tendencia de un sistema o de sus componentes, a desarrollar fuerzas para mantener el sincronismo y el equilibrio, se conoce como estabilidad [1].
El concepto de estabilidad en un sistema eléctrico de potencia relaciona la capacidad de un sistema de potencia para permanecer en sincronismo y la tendencia de un sistema para regresar y mantenerse en un punto de operación en el estado estacionario después de que ha ocurrido una falla. Los sistemas eléctricos de potencia involucran generadores síncronos situados en largas estaciones de potencia y conectados a cargas que son dinámicas o estáticas. Las cargas tienen una importante influencia en la estabilidad y pueden afectar a un generador volviéndolo inestable.
La frecuencia y el voltaje son las dos variables más importantes en un sistema eléctrico de potencia. El control de estas variables se realiza por medio de controles automáticos de voltaje y gobernador de la turbina. Los parámetros de estos controles son ajustados de tal forma que las respuestas a los cambios en el sistema tengan características conocidas. El control automático de voltaje se utiliza para regular el voltaje en las terminales del generador y el flujo de potencia reactiva [2].
basados en las técnicas de la inteligencia artificial [3], debido a que existen algunas restricciones de los métodos convencionales por al gran énfasis en linealizar los sistemas y a la exitosa proliferación de las técnicas inteligentes en muchas aplicaciones de la ingeniería con la ayuda de software especializados [2].
Los controles inteligentes, son controles que se diseñan e implementan siguiendo algunas técnicas de la inteligencia artificial, se están convirtiendo en la nueva generación de controles industriales y algunos como los reguladores inteligentes pueden ser definidos con base al conocimiento que se tiene de sus componentes, con referencia de los reguladores convencionales [2].
Las técnicas de la inteligencia artificial se han convertido en una herramienta fundamental para abordar problemas complejos, incluyendo en el área del control automático. El control automático ha desempeñado una función vital en el avance de la ingeniería y de la ciencia. El control automático se ha vuelto una parte importante e integral de los procesos modernos industriales y de manufactura.
La inteligencia artificial tiene varias ramas, entre ellas se encuentra la lógica difusa y a diferencia de la lógica convencional, en donde sólo son posibles los valores de falso o verdadero, la lógica difusa permite definir valores intermedios en un intento por aplicar un modo de pensamiento similar al del ser humano [4].
En 1965 el profesor L.A. Zadeh, en la Universidad de California en Berkely, dio a conocer un artículo donde planteaba los conjuntos difusos. Una alternativa programable de control, la cual aplicaba descripciones subjetivas o ambiguas que son comúnmente utilizadas en el leguaje colonial [5].
Durante los últimos años los sistemas de control con lógica difusa (CLD) (FLC, del inglés FFuuzzzzyy LLooggiicc CCoonnttrrooll) se han venido consolidando como una herramienta útil para tratar y modelar sistemas complejos y no lineales, así los FLC han sido incorporados en un gran número de productos y procesos [6], [7].
1.2.
JUSTIFICACIÓN
En la actualidad se están aplicando técnicas de la inteligencia artificial, llamados controles inteligentes en distintos campos de la ciencia para superar los límites de los métodos clásicos [9]. Los controles inteligentes se caracterizan por su habilidad de establecer una relación funcional entre sus entradas y salidas con datos empíricos, sin el recurso de modelos explícitos de los sistemas controlados. Al contrario de los controles convencionales, los controles inteligentes pueden aprender, recordar y tomar decisiones.
Los controles inteligentes pueden ser entrenados para operar efectivamente en condiciones de incertidumbre, pueden responder a situaciones imprevistas autónomamente, sin la intervención del operador del sistema.
Durante los últimos veinte años, se ha hecho un gran esfuerzo para conseguir nuevos desarrollos y técnicas de control no convencionales que puedan aumentar o reemplazar las técnicas de control convencionales. Un número de técnicas de control no convencionales han evolucionado, ofreciendo soluciones a muchos problemas del control en la industria. Esto es la esencia de lo que ha sido llamado el control práctico, es una colección de técnicas que los ingenieros han encontrado eficazmente y fácilmente para usar en el campo [2].
El éxito de los controladores de lógica difusa se debe principalmente a su capacidad de hacer frente al conocimiento representado en una forma lingüística en lugar de la representación en el marco matemático convencional. Ingenieros de control tradicionalmente han dependido de modelos matemáticos para sus diseños. Sin embargo, cuanto más complejo es el sistema, menos eficaz es el modelo matemático. Este es el concepto fundamental que sirvió de motivación para emplear la lógica difusa y se formula por Lofti Zadeh, el fundador de la teoría de conjuntos difusos, como el principio de incompatibilidad.
Los modelos de los problemas del mundo real pueden ser sistemas muy complejos y la principal ventaja de los controladores de lógica difusa es su capacidad para incorporar la experiencia, la intuición y la heurística en los sistemas complejos en lugar de basarse en los modelos matemáticos. Esto hace que sean más eficaces en aplicaciones en las que los modelos existentes están mal definidos y no lo suficientemente confiable [10].
1.3.
OBJETIVO GENERAL
Proponer y aplicar la estructura de un sistema de control difuso para la estabilidad de un sistema eléctrico de potencia.
1.4.
P
LANTEAMIENTO DEL PROBLEMA
El descubrimiento del electromagnetismo por Michael Faraday en 1831 condujo al rápido desarrollo de las máquinas de electroimán para la conversión de energía mecánica en eléctrica.
La invención de las bombillas y generadores impulsados por la máquina de vapor en los Estados Unidos por Thomas A. Edison llevó a la expansión comercial de generación eléctrica para fines de iluminación hacia el final del siglo XIX. En los primeros días la corriente directa era la más utilizada, pero cuando la transmisión se hace a grandes distancias, se encontró que la corriente alterna era la más adecuada. La transmisión de potencia a alta tensión es más económica y el nivel de tensión de corriente alterna se puede cambiar fácilmente usando transformadores. En la segunda mitad del siglo XX, la corriente alterna (c.a.) se hizo casi universal, lo que lleva al uso expandido de generadores de c.a. Entre los diversos tipos de generadores de c.a., el generador síncrono polifásico es la máquina más grande de una sola unidad eléctrica en producción hoy en día, siendo común con potencias de hasta varios cientos de MVAs.
Los generadores son ampliamente utilizados en grandes centrales eléctricas, así como en industriales, marinas, telecomunicaciones y otras aplicaciones de energía de reserva o continúa. Trabajos recientes en generadores síncronos están dirigidos principalmente a la mejora de la eficiencia de la máquina, la calidad de la potencia de salida y la estabilidad del sistema. Los generadores síncronos son responsables de la mayor parte de la energía eléctrica generada en el mundo. Se utilizan principalmente en las centrales de potencia y son predominantemente accionados por turbinas hidráulicas o vapor. Estos generadores están conectados usualmente a un bus-infinito donde las tensiones en los terminales se mantienen en un valor constante independientemente de la carga debido a la capacidad de todos los otros generadores también conectados a él [10].
Estos sistemas expertos estimulan la investigación dentro de la aplicación de estos sistemas, incluyendo aplicaciones de control [12].
En las últimas dos décadas, ha habido un enorme crecimiento en el uso de controladores de lógica difusa en sistemas de potencia, así como aplicaciones de electrónica de potencia. Una reciente serie de tutoriales en la IEE Power Engineering Journal [13] [14], que se centró exclusivamente en las aplicaciones de la lógica difusa en sistemas de potencia es evidencia de su creciente importancia en el campo. Las aplicaciones actuales en los sistemas de potencia incluyen un control de estabilidad de sistema potencia, evaluación de la estabilidad del sistema de potencia, detección de fallas de línea y optimización de los procesos de generación, transmisión y distribución. La lógica difusa se utiliza también en el control de movimiento, control de turbinas de viento, la optimización de la eficiencia de los motores y la estimación de forma de onda. Las ventajas del uso de la lógica difusa en tales aplicaciones incluyen las siguientes [10]:
Los controladores de lógica difusa no dependen de modelos matemáticos precisos. Esto es particularmente útil en aplicaciones de sistemas de potencia donde los grades sistemas son difíciles de modelar. También es relevante para aplicaciones más pequeñas que tienen importantes no linealidades en el sistema.
Los controladores de lógica difusa se basan en métodos heurísticos y por lo tanto capaces de incorporar la intuición y la experiencia humana.
Hay muchas maneras de construir y poner en práctica un sistema de lógica difusa, una de ellas es utilizar lenguajes de programación tales como C++, Java o MATLAB [10].
1.5.
CONTENIDO DE LA TESIS
La tesis está dividida en cinco capítulos y una sección de anexos.
En el capítulo 1 se presenta la introducción de la tesis que incluye el objetivo general, el planteamiento del problema, la justificación y las aportaciones que se tienen con la realización de la tesis.
En el capítulo 4 se presenta la información para la construcción del controlador Difuso del tipo Mamdani propuesto, su estructura y el procedimiento para la aplicación del mismo en la estabilidad del sistema eléctrico de potencia.
El capítulo 5 presenta las simulaciones y el análisis de los resultados del sistema de control difuso propuesto y de un sistema de regulación convencional del tipo ST1 (ST, del inglés SSttaattiiccEExxcciittaattiioonnSSyysstteemmss). Así como las conclusiones del trabajo de investigación.
C
APÍTULO
II
ESTABILIDAD DE UN SISTEMA ELÉCTRICO DE POTENCIA
2.1
CONCEPTOS BÁSICOS
El eessttaaddooddeeuunnssiisstteemmaa representa la cantidad mínima de información sobre el sistema que se requiere conocer en un instante inicial , para determinar el comportamiento futuro del sistema.
Para describir el estado de un sistema se define un conjunto de variables linealmente independientes, llamadas variables de estado, en el caso de los sistemas de potencia las variables normalmente empleadas son la tensión y ángulo de los buses del sistema, aunque pueden usarse también las corrientes. En general, la forma de representar la información sobre un estado no es única, de manera que el conjunto de variables de estado tampoco lo es. El control de la evolución de los sistemas se realiza con la ayuda de un conjunto de variables llamadas variables independientes, variables de control o variables de entrada, denotadas como . En el caso de los sistemas de potencia, corresponden a las potencias mecánicas entregadas por las turbinas, a las entregas de tensión de los generadores, a la referencia de los lazos de control, etcétera.
Cualquier otra variable en el sistema como por ejemplo la ssaalliiddaa puede ser expresada en función de las variables de estado y de control, según:
en la cual es el vector de salida, y es el vector de funciones no lineales que relaciona las salidas con las entradas y las variables de estado.
Los ppaarráámmeettrroossddeellssiisstteemmaa son los valores que determinan la estructura del sistema. En el caso de un sistema de potencia son, por ejemplo, las admitancias de los equipos de la red, los límites de operación de las máquinas y de los equipos, las admitancias permanente, transitoria y subtransitoria de los generadores, la relación de transformación de los transformadores, las constantes de tiempo de los reguladores, los retardos de operación de los equipos de control, etcétera.
El eessppaacciioo ddee eessttaaddo es el espacio euclidiano de o dimensiones (las variables de estado) en el que se representa el estado del sistema. La ttrraayyeeccttoorriiaa ddee uunn eessttaaddo es el o
U
UnnSSiisstteemmaaddiinnáámmiiccoo es aquel sistema que puede ser representado por un conjunto de ecuaciones diferenciales de primer orden, lineal o no lineal:
en la cual es el vector de estado, con las variables de estado
que es el vector de entradas , y describe la estructura del sistema.
El sistema es aauuttóónnoommoo si las derivadas de las variables de estado no son funciones explicitas del tiempo , como es el caso de los sistemas de potencia. En tal caso:
Las variables de estado y, consecuentemente, la trayectoria, así como las salidas, podrán ser calculadas si se conocen las funciones , las condiciones iniciales de las variables de estado en y, además, las entradas al sistema para .
Un ppuunnttooddeeeeqquuiilliibbrriioo es aquel en el que todas las derivadas valen simultáneamente cero, por lo que el sistema está en equilibrio:
donde es el vector de estado en el punto de equilibrio.
Si las funciones son lineales, el sistema es lineal, es decir, se puede representar como:
y hay un sólo punto de equilibrio, .
En este caso, el punto de equilibrio será dependiente de las entradas, y cuando las entradas valen cero, el estado se desplazará siempre hacia el origen en el espacio de estado [15].
figura 2.1 presenta los puntos de estabilidad). En este caso, los puntos de equilibrio dependen en general del tipo y magnitud de las entradas y del estado inicial [15].
Figura 2.1. Sistema de estabilidad frente a la potencia de operación [16].
Por otra parte, primero conviene precisar que en la práctica interesa estudiar la estabilidad en condiciones de entrada constante de modo que es usual tratar las entradas como un parámetro, que por lo tanto no aparecen en forma explícita en las ecuaciones (ecuaciones sin entrada):
Si es una solución del sistema, entonces corresponde a un estado de equilibrio que satisface . Como en la mayoría de los casos el punto es nulo, y con el objeto de normalizar la notación en los estudios de estabilidad, es común trasladar el punto de equilibrio al origen del espacio de estado, mediante un cambio de variables de la forma:
[image:21.612.154.474.116.370.2]
Si , y suponiendo que la solución de la ecuación 2.7 es , se puede plantear la siguiente definición intuitiva de la estabilidad:
EEllssiisstteemmaaeessiinneessttaabblle, si la trayectoria para e tiende a apartarse del origen; EEllssiisstteemmaaeesseessttaabblle, si la trayectoria no tiende apartarse de e ; y,
EEllssiisstteemmaaeessaassiinnttóóttiiccaammeenntteeeessttaabblleeaalloorriiggeen, si n tiende a 0 cuando tiende a (el sistema vuelve al mismo punto de equilibrio).
Para ilustrar estas ideas consideraremos la figura 2.2, que muestra esta definición para un sistema de sólo dos estados, .
Figura 2.2. Sistema de dos estados [15].
Se habla de eessttaabbiilliiddaaddllooccaal asintótica o no, si el sistema es estable para un conjunto l
de condiciones iniciales cercanas entre sí, es decir, para estados iniciales que satisfacen
. El conjunto corresponde al ddoommiinniiooddeeeessttaabbiilliiddaad del d
sistema. En los sistemas de potencia, corresponde a la tolerancia de voltajes (en torno del 10 % del valor nominal) y frecuencia (en torno del 4% del valor nominal).
Lo anterior significa que al aplicar una perturbación, si la trayectoria evoluciona hacia un punto dentro del radio , entonces el sistema es estable.
Si en el caso sencillo de la figura 2.2 se supone que todos los estados incluidos en la circunferencia de radio son estables, entonces el dominio de estabilidad corresponde a todo los estado que satifacen [15].
Se habla de eessttaabbiilliiddaaddgglloobbaal si el sistema es estable para cualquier perturbación, no l
fuera de la región de operación. Un ejemplo de esto se presenta en estudios de cortocircuito, donde la tensión de falla es cercana a cero, pero no lo es en el resto del sistema. Este caso de de la figura 2.2, donde la variable se mantiene en torno de sus valores nominales, mientras que esta fuera de sus márgenes de tolerancia, producto de la perturbación. Por ello, en la práctica en los sistemas de potencia sólo interesa estudiar la estabilidad global frente a un conjunto reducido de perturbaciones, generalmente cortocircuitos en un punto de la red, fases abiertas o fluctuaciones producidas por la desconexión intempestiva de grandes generadores o consumos [15].
Según sea la magnitud de la perturbación operante, se definen dos tipos de estabilidad:
EEssttaabbiilliiddaadd aannttee ppeeqquueeññaass ppeerrttuurrbbaacciioonnees, en la que el sistema, sometido a una s
perturbación de pequeña magnitud, permanece realizando ciclos en una zona estrecha en torno del punto de equilibrio. Si el sistema vuelve al punto de equilibrio, se dice que es aassiinnttóóttiiccaammeenntteeeessttaabbllee..
EEssttaabbiilliiddaadd aannttee ggrraannddeess ppeerrttuurrbbaacciioonneess, en la que el sistema, sometido a una perturbación de mayor magnitud, permanece realizando ciclos en una región finita , del espacio de estado. Si el sistema vuelve al punto de equilibrio, se dice que es
a
assiinnttóóttiiccaammeenntteeeessttaabblle en la región finita e . Si incluye todo el espacio del estado, se habla de eessttaabbiilliiddaaddgglloobbaal. l
2.2
E
STABILIDAD DE UN SISTEMA ELÉCTRICO DE POTENCIA
(SEP)
Las variables de estado fundamentales en el análisis de la estabilidad de las redes de potencia son las tensiones y la velocidad angular o la frecuencia de las unidades de generación, en conjunto con sus variables de control. En la operación normal, deben encontrarse dentro de rangos predeterminados de tolerancia en torno a sus valores nominales, 50 o 60 Hz en el caso de la frecuencia y el voltaje nominal en el caso de la tensión. Ahora bien, como las condiciones de trabajo están cambiando constantemente, en todo instante todas las variables eléctricas del sistema están experimentando fluctuaciones, lo que implica la permanente ocurrencia de fenómenos dinámicos de acomodo en la red. Estos cambios son en su mayoría de una magnitud tal que pueden ser manejados sin problemas por las máquinas y sus controles. En consecuencia, si bien en estricto rigor el régimen estacionario no existe como tal, en régimen normal la aproximación cuasi-estacionaria es razonablemente buena y permite realizar su programación y planificación con un margen aceptable de error.
Se define entonces la eessttaabbiilliiddaadd ddee uunn ssiisstteemmaa ddee ppootteenncciiaa como la capacidad de este para mantenerse operando en condiciones normales, dentro de valores aceptables de frecuencia y tensión, luego de experimentar una perturbación o falla, como se ilustra en la figura 2.3.
Figura 2.3. Estabilidad en sistemas de potencia [15].
En donde el origen del sistema de estado, representa el punto de operación en condiciones nominales, y el cilindro la tolerancia para sus variaciones. Típicamente, un sistema puede tener muchos generadores y la condición para que exista la estabilidad requiere que todos estén dentro de sus márgenes de operación aceptables. Esta condición no siempre puede ser asegurada, particularmente porque hoy en día las razones ambientales y económicas presionan para que los sistemas operen en zonas cercanas a los límites de estabilidad [15].
Ahora bien, las consecuencias de que ambas variables modulo de tensión y frecuencia salgan de la región de operación considerada como aceptable, son diferentes. En efecto, cuando las unidades de generación operan con frecuencias distintas, más allá de la región de estabilidad, se produce el colapso (desenergización) total del sistema, en un rango de tiempo no superior a los pocos segundos. Cuando la variable que sale de su rango es la tensión, el efecto nocivo sobre la red, y su posterior desencadenamiento en una caída del sistema puede tomar varios minutos. Por ello, históricamente se ha estudiado de manera separa la estabilidad del sistema para ambas variables [15].
2.3
E
CUACIÓN DE MOVIMIENTO DE UN GENERADOR
pérdidas del generador). Este desequilibrio se debe a que varia muy rápidamente (casi en forma instantánea) ante cualquier perturbación en el sistema, mientras que permanece constante hasta que reacciona el control de velocidad (lo que no es inmediato, puesto que el cambio de velocidad es pequeño y la inercia elevada). Por ello, es frecuentemente suponer que es constante durante el periodo que comprende el análisis de estabilidad [15].
Dado que en estricto rigor la velocidad angular experimenta pequeñas variaciones, las potencias también lo hacen. Como el intervalo de estudio de la estabilidad se realiza en torno a variaciones menores de la frecuencia (típicamente los desprendimientos de carga comienzan cuando se registran variaciones del 2%), no se comete gran error al suponer la frecuencia constante cuando se expresa el torque en términos de la potencia. La potencia acelerada se consume tanto en modificar la energía cinética del grupo turbina-generador, como en superar el torque amortiguador que representa los roces mecánicos y las corrientes inducidas en los buses amortiguados:
Analizando cada una de estas potencias, se tiene que:
a) La variación de energía cinética se puede expresar en función de la energía inicial como:
En la que representa la posición angular del rotor, medida en radianes eléctricos, en la relación con un eje de referencia fijo cualquiera. Para simplificar, se acostumbra tomar como eje de referencia a un eje síncrono, que gira imperturbablemente a velocidad constante, con una fase que coincide con la posición del rotor del generador que servía de referencia ante la perturbación. Llamando a este ángulo, y al operador de Laplace, se tendrá:
en la cual el mmoommeennttooaanngguullaarr es igual a:
Nótese que en esta expresión se ha usado la velocidad síncrona, lo que representa una aproximación adecuada según se vio anteriormente. Expresado en por unidad (dividido por ):
En la literatura norteamericana se expresan en función de la ccoonnssttaanntteeddeeiinneerrcciiaa H
H (energía cinética almacenada a velocidad síncrona dividida por la capacidad nominal de la máquina), mientras que en la literatura europea se prefiere en función del ttiieemmppoo ddee a
arrrraannqquue o e ccoonnssttaannttee ddee aacceelleerraacciióónn (tiempo necesario para alcanzar la velocidad angular síncrona, al partir con torque nominal constante), se advierte que [15]:
[image:26.612.139.494.371.714.2]
En las figuras 2.4 y 2.5 se muestran los valores típicos de Ta para generadores de
polos salientes y turbogeneradores de diversas capacidades. Se advierte que Ta decrece al
aumentar la capacidad en el caso de los turbogeneradores, pero crece con la capacidad en el caso de generadores de polos salientes.
Figura 2.5. turbogeneradores [15].
Cuando no se conoce o , es necesario calcularlos a partir de los datos de diseño del grupo turbina-generador, teniendo cuidado al emplear los antecedentes del grupo y no solo al generador que es comparativamente liviano y con usar correctamente los antecedentes de o de quienes difieren en un factor 4.
b) El torque amortiguador representado por se debe a la existencia de roces mecánicos y a la aparición de corrientes inducidas en las barras amortiguadoras y en el cuerpo del rotor, en la medida en que la velocidad se desvía de la síncrona. Este torque, que tiende a frenar el desplazamiento del rotor para volverlo a la posición de equilibrio permanente, crece con la velocidad relativa [15]:
[image:27.612.141.483.134.463.2]en la cual es el deslizamiento, de modo que:
donde es una característica de la máquina, que pocas veces se conoce, y que en todo caso suele ser pequeña por lo que a menudo se la desprecia.
c) La potencia mecánica suministrada por la turbina permanece constante mientras no se modifique el control de velocidad (hay un efecto secundario de variación de al cambiar por ejemplo el gasto hidráulico, fenómeno que para estos fines es despreciable). Este control es poco sensible, y no reacciona con variaciones pequeñas de la velocidad, como las que ocurren al comenzar una perturbación . Además, presenta una constante de tiempo comparativamente larga, de modo que se le puede considerar constante durante los primeros segundos, e igual al valor antes de la perturbación (prefalla):
d) La potencia eléctrica entregada por el generador durante la perturbación depende de la fem detrás de la reactancia transitoria y de la corriente :
(Nótese que normalmente no se considera el período subtransitorio) Usualmente se supone constante. Ello es cierto solamente durante los primeros instantes de la oscilación, mientras no actúa el control rápido de la excitación. Como ya se ha dicho, la estabilidad transitoria del sistema se decide justamente en esos primeros segundos, por lo que la aproximación es generalmente valida.
La corriente depende del comportamiento de toda la red eléctrica. Dado que las variaciones de frecuencia son pequeñas, se puede suponer sin gran error que todos los elementos estáticos del sistema (líneas, transformadores, etcétera) operan en condiciones cuasi-estacionarias, con lo que se simplifican los cálculos.
En vez de la corriente puede usarse también la tensión en las terminales (o la tensión constante en alguna otra barra cercana). En tal caso,
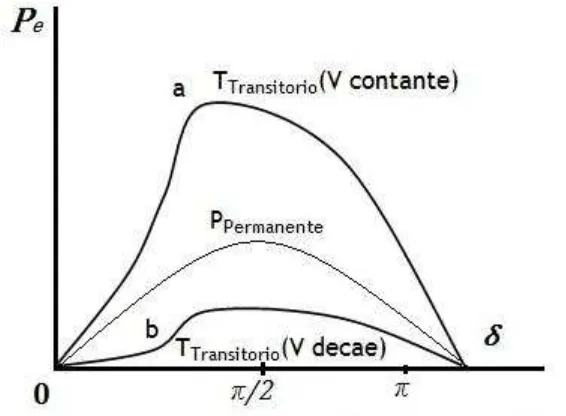
Normalmente , de modo que desde el punto de vista teórico, y siempre que fuese constante (máquina pequeña operando contra un bus infinito), podría alcanzar en teoría valores transitorios muy superiores a los máximos que se pueden lograr durante condiciones cuasi-estacionarias (curva “a” en figura 2.6).
[image:29.612.170.453.204.412.2]Lo usual, sin embargo, será que se reduzca como consecuencia de la falla ( si la falla es en las terminales de la máquina), y que también se disminuya (curva “b” en la
figura 2.6.
Figura 2.6. Potencia eléctrica en función del ángulo [15].
Nótese que el término en de la ecuación 2.18, aunque pequeño en general (ya que ), existe a pesar de que la máquina sea de rotor cilíndrico.
En resumen, el comportamiento dinámico de la máquina durante el periodo inicial de la oscilación queda representada por una ecuación diferencial no lineal en en función del tiempo , para la cual no existe como regla general una solución analítica [15]:
2.4
E
STABILIDAD TRANSITORIA
importante y no lineal en la potencia eléctrica transferida en el sistema, que a su vez se traduce en fuertes oscilaciones electromagnéticas de los rotores de los generadores. La magnitud angular de estas oscilaciones depende no solo del tipo de falla, sino también de su ubicación y duración. Si alcanzan una cierta magnitud, harán perder el sincronismo a determinados generadores, agravando así la situación de las restantes máquinas del sistema, y pudiendo causar con ello el paulatino colapso del sistema completo. Una manera de prevenir este problema es mediante la rápida operación de protecciones para aislar el equipo donde ocurre la falla (línea o transformador) y/o desconectar consumos en caso de que se produzca un desbalance de potencia. La frontera de tiempo disponible para esta acción es muy breve, típicamente algunos segundos.
El análisis matemático es complicado por la no linealidad de las ecuaciones, por lo que se recurre a métodos de simulación, como métodos numéricos que permiten determinar la variación en el tiempo que experimenta el ángulo de cada máquina. Estos cálculos deben repetirse para cada tipo de ubicación diferente de la falla, debido a que no se puede asegurar la estabilidad en forma general, sino solo en relación con una falla bien determinada y bajo condiciones iniciales también especificas en una región de equilibrio, un sistema eléctrico puede ser estable respecto de una perturbación física dada, e inestable en la relación con otra.
Dada la gran cantidad de fallas y perturbaciones que le pueden suceder a un sistema eléctrico, es impracticable y económicamente ineficiente diseñar el sistema de modo que sea estable para cualquier perturbación posible. Las contingencias de diseño son seleccionadas con base en algún criterio de probabilidad de ocurrencia.
Cabe señalar que como interesa la respuesta angular, no se puede usar la simplificación de suponer frecuencia constante y el análisis deberá hacerse en función del ángulo de cada máquina. Solo en los casos excepcionales de centrales cercanas entre si y alejadas de la perturbación, se puede aceptar el reemplazo por una sola máquina equivalente.
a) PPeerriiooddooddee ffaalllla, que va desde el inicio de la falla hasta su despeje o eliminación por a
las protecciones.
b) PPeerriiooddoo ddee ppoossffaallllaa, que va desde que se ha despejado la falla hasta que se logra estabilizar el sistema. Puede ocurrir también que el sistema no logra alcanzar un régimen permanente y pierda el sincronismo. En todo caso, en este periodo se puede usar tanto una misma configuración o topología de la red, sin acciones de control, o bien, considerar acciones de restauración de la red, tales como reconexión tentativa del elemento fallado, desprendimientos de carga o acciones coordinadas de desconexión simultánea de carga y generadores.
Cabe destacar que la estabilidad puede perderse con posterioridad, debido a la ocurrencia de oscilaciones crecientes en el tiempo, pero ello no corresponde a una inestabilidad transitoria, sino a inestabilidad por falta de amortiguamiento, que se acostumbra a estudiar mediante técnicas de señales pequeñas.
Por otra parte, para apreciar algunas de las situaciones que se presentan en relación con la solución de la ecuación de oscilación, se analizará primero el caso de una máquina a tensión constante V (ver figura 2.7), en donde, se despreciara el efecto de los amortiguadores y se supondrá que .
Figura 2.7. Máquina bus-infinito [15].
En caso de ocurrir una falla en algún punto de la unión entre el generador y el sistema, la impedancia de paso (que incluye ), que se obtiene mediante una transformación , crecerá a . Suponiendo un cortocircuito trifásico, es decir, , y por tanto, la ecuación de oscilación quedaría: , en la que la potencia aceleratriz se determina por
. Esta ecuación es integrable y conduce a [15];
Figura 2.8. Oscilación angular del rotor [15].
El rotor se “dispara” en forma parabólica ( crece con ), tal como se muestra en la figura 2.8, perdiéndose rápidamente el sincronismo, si no se elimina la causa de la aceleración. Para ello deben actuar las protecciones en el tiempo y luego se debe esperar un lapso prudente para que se des ionice el arco. Si en el tiempo , se reconecta la línea, la potencia resistente salta instantáneamente y se establece una potencia desaceleratriz que depende de :
La ecuación de oscilación ya no es integrable mediante funciones sencillas, pero se comprende que crece a menor velocidad y que el resultado final depende del instante de reconexión: si la reconexión ocurre muy tarde (figura 2.8 a lado izquierdo), la máquina pierde de todos modos el sincronismo. Pero si todavía es oportuna (figura 2.8 b lado derecho), llega el momento en que deja de crecer y en que a pesar de ser , se conserva el sincronismo.
2.5
ESTABILIDAD ANGULAR
Limitándose al comportamiento del sistema frente a cambios que afecta la frecuencia, se acostumbra definir la estabilidad angular de un sistema eléctrico de potencia como la capacidad que presentan las diversas máquinas que existan en él, de mantenerse en operación síncrona durante periodos que siguen a cualquier falla o perturbación. Operar en forma síncrona significa hacerlo con idénticas velocidades eléctricas angulares medias, es decir, , siendo la velocidad mecánica de cada máquina y el numero de pares de polos correspondiente ( en radianes o grados mecánicos). Dado que la frecuencia es una variable que compromete a toda la red, este tipo de estabilidad afecta a todo el sistema.
La ocurrencia de problemas severos de estabilidad en un sistema de transmisión implica usualmente su desmembramiento en dos o más subsistemas aislados (isla) y la pérdida del servicio parcial o total de los consumos. Retomar el servicio normal es un proceso lento (varios minutos), porque hay que abastecer primero los subsistemas en forma separada y luego sincronizarlos entre sí. Solo cuando esta reconstituido el sistema completo se puede reconectar en forma gradual el resto de los consumos. A este proceso se le denomina recuperación del servicio.
En los sistemas de potencia se presenta dos tipos de problemas de estabilidad asociados a la frecuencia: las oscilaciones de potencia y la estabilidad transitoria, que ya se describió.
Las oscilaciones de la potencia activa intercambiada entre máquinas, con frecuencias que esta típicamente en el rango de 0,1 a 2 Hz, pueden sufrir frente a perturbaciones, como resultado de los ajustes de los controles de los generadores. En casos críticos, estas oscilaciones pueden ser crecientes en amplitud por falta de amortiguamiento y pueden llevar a la red a un estado de emergencia.
En la práctica, este fenómeno se observo primero en máquinas pequeñas y muy cargadas que operaban eléctricamente alejadas (esto es, con ángulos grandes) de los buses fuertes del sistema, las que presentaban oscilaciones de potencia hacia el sistema. También se ha observado este fenómeno en grupos de máquinas que intercambian potencia con otro grupo de generadores en la red, en lo que se conoce como oscilaciones interáreas. Ambos fenómenos corresponden al estudio de estabilidad angular y debido a que su magnitud es pequeña, se les denomina estabilidad de señal pequeña [15].
2.5.1
E
STABILIDAD DE SEÑAL PEQUEÑAabsorbidas que son marginales en relación con la demanda total del sistema (cambios en la magnitud de los consumos, desconexión intempestiva de una máquina menor) [15].
En estos casos, es posible efectuar un análisis de estabilidad ante perturbaciones pequeñas, para el cual la ecuación de movimiento de los generadores toma la forma:
La inestabilidad ante perturbaciones pequeñas puede presentarse de dos formas características: un incremento en el ángulo del rotor por medio de modos no oscilatorios o aperiódicos (debido a la ausencia de suficiente torque amortiguado).
El periodo de tiempo de interés para estudios de estabilidad ante perturbaciones pequeñas es de 10 a 20 segundos
2.5.2
E
STABILIDAD ANGULAR EN UN SISTEMA MÁQUINA BUS-
INFINITOSe tomará el mismo sistema de dos buses usado anteriormente (ver figura 2.7). La máquina es representada en su forma normal, con la fuerza electromotriz (ffeem)m permanente y la reactancia permanente , ya que para frecuencias de oscilación inferiores a 2 Hz no corresponde usar (en este caso, considera ). Además, como se verá, es conservador usar el mayor valor posible de la reactancia.
Si se tiene una desviación pequeña respecto de un punto de operación estacionario inicial, la ecuación 2.20 puede ser escrita como [15]:
Desarrollando esta expresión se obtiene:
Como es pequeño, constante, se puede aproximar:
Dado que el estado inicial es un estado de equilibrio estacionario, se cumple:
Con lo anterior, se obtiene finalmente:
donde y son la condición inicial para la desviación del ángulo y su primera derivada, es la constante de aceleración y es el ccooeeffiicciieenntteeddeessiinnccrroonniizzaacciióón. n
La solución de esta ecuación es una señal senoidal dada por la expresión:
La frecuencia de la oscilación es:
Así, para cada combinación de valores de , se tiene un modo de oscilación distinto para el sistema. Usando valores típicos para estos parámetros, se observa que la frecuencia de oscilación está comprendida entre 1 y 2 Hz. Una consecuencia práctica importante es que esta oscilación angular se manifiesta en pequeñas fluctuaciones en la potencia transmitida por la línea. Por este motivo, este fenómeno se conoce también como
o
osscciillaacciioonneessddeellaappootteenncciia. a
Asimismo, del análisis presentado se deduce que las oscilaciones a la ecuación diferencial de segundo orden poseen polos dados por la expresión:
Se infiere que los polos se ubicarán en el eje imaginario para las situaciones en las que el coeficiente de sincronización sea negativo, es decir, cuando . Según sea la topología del sistema en el momento de la perturbación, existen la posibilidad de que se esté operando cerca de este límite, o que las oscilaciones resulten crecientes en el tiempo y puedan llevar a un colapso del sistema. De las ecuaciones se observa que a medida que
, la amplitud de la oscilación aumenta, ya que es inversamente proporcional a la raíz cuadrada del torque sincronizante [15]:
Existe, entonces, una potencia inicial transferida máxima, que determina a su vez un ángulo máximo, más allá del cual no se puede operar en forma estable. En consecuencia, hay un límite superior de operación del sistema, que es en general menor al límite térmico de los equipos de transmisión. Por lo tanto, hay que tener cuidado con una política de operación del sistema ajustada al límite térmico de sus componentes, ya que sobrepasar la potencia inicial transferida máxima antes citada, implicaría que las máquinas presenten oscilaciones crecientes, que provocaran su salida de servicio.
De las ecuaciones se puede concluir también que mientras mayor es la reactancia , mayor será la amplitud de la oscilación. Por ello, este fenómeno se hace más visible en situación donde el generador por conectar se encuentra alejado eléctricamente del sistema equivalente.
2.6
CONTROL DE LAS OSCILACIONES DE POTENCIA [15]
Los principios usados para controlar estas oscilaciones fluyen de las ecuaciones derivadas para el caso de un sistema máquina-bus infinito, recién desarrolladas. En efecto, las oscilaciones se pueden amortiguar por medio de los siguientes tres mecanismos de control:
Variando la tensión tras la reactancia . Este control se realiza con ayuda del sistema que regula la tensión de las máquinas síncronas y utiliza como variable de control la tensión de excitación de enrollado del rotor. Por esta razón, recibe el nombre de control de excitación. Permite mantener la tensión de salida del generador cercana a un valor de referencia. El efecto inmediato es que la potencia eléctrica variaría con las variaciones de la fem tras la reactancia, por lo que el sistema de ecuaciones debe incorporar ahora un término adicional, quedando [15]:
Desarrollando en la misma forma que se hizo en la sección anterior, se obtiene:
Lo que conduce a la nueva ecuación característica:
control encargada de realizar esta tarea es el EEssttaabbiilliizzaaddoorrddeellaaPPootteenncciiaaddeellSSiisstteemmaa (PSS, del inglés Power System Stabilizer).
Se modifica la reactancia equivalente entre las máquinas . En la actualidad los
e
eqquuiippooss fflleexxiibblleess ddee ccoommppeennssaacciióónn eenn ssiisstteemmaass ddee ttrraannssmmiissiióónn eenn ccoorrrriieennttee aalltteerrnna a
(FACTS, del inglés FFlleexxiibbllee AACCTTrraannssmmiissssiioonn SSyysstteemmss) pueden modificar la reactancia de los equipos de transmisión, lográndose un rango de control importante sobre los valores. Los dispositivos más usados en esta categoría son los condensadores serie controlados por tiristores (TCSC, del inglés Thyristor Controlled Series Capacitor), que corresponde a una impedancia en serie con las líneas, que se puede controlar dinámicamente. Como se puede ubicar en cualquier parte de la red, son bastante efectivos en el control de los modos de oscilación inter áreas.
Se limita la transferencia de potencia por la línea . Esta maniobra se realiza comúnmente en forma manual, aprovechando la larga duración del fenómeno, pero puede ser realizada también mediante equipos modernos de la familia UPFC que son equipos construidos a partir de dos conversores AC/DC dispuestos en forma anti paralela. Su operación es generalmente bidireccional y pueden controlar en forma flexible la potencia transferida. Además, pueden controlar también la potencia reactiva e incluso pueden cambiar el valor de la reactancia equivalente de la línea a la cual están conectados.
2.7
ESTABILIDAD DE LAS TENSIONES [15]
Hasta el momento, el estudio de las tensiones en los SEP’s se ha limitado a un análisis cuasi-estacionario asociado a la regulación de tensión y a un análisis de situación de falla. En esta sección se estudiarán aspectos dinámicos en la evolución de las tensiones en un sistema de potencia.
Se define como estabilidad de las tensiones de un sistema eléctrico de potencia, a la capacidad que este presenta para mantener las tensiones en todas los buses del sistema dentro de límites aceptables, durante los períodos que siguen a una perturbación.
Problemas de estabilidad asociados a este fenómeno han aparecido en los últimos decenios, al registrase un aumento generalizado de transmisiones de potencia que involucran grandes distancias.
compensación, para luego propagarse a zonas más amplias, si no existen los equipos de soporte adecuados. En su final, puede comprometer a todo el sistema, con tensiones progresivamente menores (que en algunas zonas pueden llegar a valores tan bajos como 0.5 p.u.), en lo que se conoce como ccoollaappssooddeetteennssiióónn. .
El fenómeno puede ser entendido como una situación de procesos dinámicos lentos, que suelen demorar varios minutos y en casos extremos hasta una hora, en los cuales participan diverso elementos con acción sobre las tensiones (generadores, consumos, transformadores, compensadores, etcétera), que hacen evolucionar el sistema hacia la región de inestabilidad. Cabe notar que la frecuencia experimenta problemas solo en el periodo final, cuando se desconectan algunos consumos o unidades generadoras. Este problema se presenta principalmente en sistemas radiales, en los que la perdida de una línea larga puede provocar una caída importante de tensión.
2.7.1
D
ESCRIPCIÓN DEL FENÓMENOEn términos generales, en un evento conducente a una pérdida de estabilidad de tensión se pueden identificar las siguientes fases:
a) El fenómeno comienza con una perturbación detonadora, típicamente la salida inesperada de una línea de transmisión, generador, transformador o equipo de compensación reactiva. Esto produce un descenso en las tensiones de un sector del sistema. Al bajar la tensión, disminuye la potencia reactiva entregada por las líneas y por los compensadores en paralelo, así como aquella consumida por las cargas que dependen de la tensión. Como resultado neto, se incrementa el flujo de reactivos por las líneas en el entorno de la zona de voltajes.
b) Los transformadores con cambiador automático de derivaciones cercanos a los consumos comienzan a restaurar las tensiones, lo que tiende a llevar a los consumos al nivel original. Pero al subir la potencia transferida, aumenta la corriente y las pérdidas reactiva, pudiéndose producir un efecto neto de mantención de la reducción de la tensión en el extremo receptor. De hecho, la acción del control automático de tensión en los transformadores puede, en algunos casos, empeorar las tensiones, en lo que se
conoce como la “acción reversa de los transformadores de control automático de
tensión”.
d) Los cambiadores de derivaciones se topan, lo que permite que los consumos se reduzcan, por su dependencia de la tensión. Si la reducción de los consumos es suficientemente grande, el sistema se estabilizara, aunque con tensiones bajas. Pero si la reducción de consumos no es significativa, el incremento de la corriente a través del sistema puede llegara a activar la operación de algunos de los relés de protección (sobrecorriente o distancia), desconectado líneas y/o transformadores (sin desconectar consumos) e incrementar la caída de tensión (aparte de debilitar el sistema). Si las desconexiones afectan a generadores, habrá un déficit de potencia activa, lo que activara relés de baja frecuencia y, subsecuentemente, se desconectara algunos consumos.
e) Si esta medida no estabiliza la frecuencia, el sistema entrara en inestabilidad angular, y como resultado final, se llagara al colapso total del sistema.
2.7.2
M
ETODOLOGÍA DEL ANÁLISISEn el caso de los sistemas reales más complejos se distinguen las siguientes alternativas metodológicas para estudiar el problema:
Realizar flujos de potencia, para obtener punto por punto las curvas y para los nodos en estudio. Es importante que en los flujos de potencia se represente correctamente la acción de los controles de tensión de las máquinas (que se saturan en algún momento) y de los cambiadores de derivaciones de los transformadores (que pueden llegar a toparse), así como también las características de variación con la tensión de los consumos
Ocupar un modelo de simulación dinámica que considere la acción de los controles de tensión y que representa los módulos de las tensiones. El resultado numérico permite conocer la evolución temporal de las tensiones en el sistema, pudiendo establecerse limites de estabilidad. Las herramientas de simulación de los SEP´s actualmente disponibles integran el tipo de modelos antes descrito, lo que permite el seguimiento de la evolución temporal de las tensiones en el sistema.
Realizar un análisis de valores propios de las matrices que describen el sistema en términos de sistemas de ecuaciones algebraicas y diferenciales.
A diferencia de los que ocurría en el análisis de estabilidad angular, en este caso interesa investigar la evolución temporal de las tensiones, de manera que se utiliza la siguiente representación del sistema:
Donde:
representa las variables dinámicas, típicamente los módulos de las tensiones tras a reactancia en generadores, tensiones de excitación, ángulos de las máquinas, etcétera.
representa las valriables algebraicas, correspondiendo a las tensiones y ángulos del bus en la red.
representa los parámetros del sistema, que normalmente corresponde a las cargas y los ajustes de los controles.
En este análisis, las máquinas deberán ser modeladas de acuerdo con su importancia en el comportamiento dinámico de toda la red, lo que condiciona la dimisión de . La representaciones más comunes son el modelo de un eje y el modelos de dos ejes en cuadratura. Debido a que el fenómeno de estabilidad de tensión es más lento que el de estabilidad angular, se acostumbre a usar el modelo de un eje, que consiste en un sistema de ecuaciones diferenciales de tercer orden (tres ecuaciones diferenciales de primer orden por cada máquina). Este modelo considera potencia mecánica constante y representa adecuadamente la evolución de la máquina para la frontera de tiempo considerada.
VT VF
VRMAX 1 A A S
K
T
1 F F S SK
T
Vref VS VRMIN -+- VR
Otros elementos que condiciona la dimensión de es el control de excitación de las máquinas, conocido como regulador automático de tensión (RAV) (AVR, del inglés Automatic Voltage Regulator). En su forma más simple, el RAV puede ser modelado por medio de un retardo de primer orden conectado en cascada con un limitador de tensión, tal como se muestra en la figura 2.9, donde representa la tensión continua aplicada al rotor;
y los limites máximo y mínimo transitorios de ; y es el valor de régimen
permanente máximo tolerado.
C
APÍTULO
III
CONTROL DIFUSO
3.1.
INTRODUCCIÓN
El control difuso se introdujo a comienzos de los años 70 como un intento para diseñar controladores para sistemas que son estructuralmente difíciles de modelar, debido a su naturaleza no lineal y a otras complejidades en la obtención del modelo del sistema [3].
Las principales razones para tal proliferación de aplicaciones, quizás sean la sencillez conceptual de los sistemas basados en Lógica Difusa, su facilidad para adaptarse a casos particulares con pocas variaciones de parámetros, su habilidad para combinar en forma unificada expresiones lingüísticas con datos numéricos y el no requerir de algoritmos muy sofisticados para su implementación.
En 1974, se realizó la primera aplicación satisfactoria de la lógica difusa para el control de un proceso a escala en un laboratorio (Mamdani y Assilian 1975).
Un controlador de lógica difusa (FLC) describe un protocolo de control por medio de reglas si-entonces, tales como "si la temperatura es baja abrir la válvula de calefacción a bajo poco". La ambigüedad en la definición de los términos lingüísticos (por ejemplo, la temperatura baja) se representa mediante el uso de conjuntos difusos, que son conjuntos con límites superpuestos, véase la figura 3.1. En el marco de conjuntos difusos, un elemento de dominio particular, al mismo tiempo puede pertenecer a varios grupos (con diferentes grados de membresía, ). Por ejemplo, pertenece al conjunto de altas temperaturas con la membresía 0.4 y para el conjunto de temperaturas medias con membresía 0,2. Esta transición gradual de la membresía a la no-membresía facilita un resultado suave del razonamiento (deducción) con reglas difusas si-entonces [17].
Desde que la lógica difusa fue introducida por Lotfi Zadeh en 1965, ha tenido muchas aplicaciones exitosas sobre todo en el control. Este 'Fuzzy' boom ha generado un gran interés en esta área junto con un auge en el estudio y la enseñanza de la teoría difusa y la tecnología.
En la tabla 3.1 se describe la historia moderna de la lógica difusa después de su invención por Zadeh en 1965. Es incomprensible e incluye sólo algunos eventos, pero se espera que puedan ser utilizados para la ilustración del desarrollo de la lógica difusa [11].
Tabla 3.1. Breve historia de la tecnología difusa [11]. 1965 El concepto de la teoría de conjuntos difusos de Lotfi Zadeh (EE.UU.) 1972 El primer grupo de trabajo sobre sistemas difusos en Japón por Toshiro
Terano
1973 Escrito sobre algoritmos difusos por Zadeh (EE.UU.)
1974 Control del motor de vapor por Ebrahim Mamdani (Reino Unido)
1977 Primer sistema experto difuso para la evaluación de solicitantes de préstamos por Hans Zimmermann (Alemania)
1980 El control de hornos de cemento por F.L. Smidth & Co. Lauritz P. Holmblad (Dinamarca) - la primera aplicación industrial permanente.
Programa de lógica difusa de ajedrez y backgammon (juegos de mesa)– Hans Berliner (EE.UU.)
1984 Control de tratamiento del agua (inyección de químicos) (Japón) Metro de Sendai sistema de control de transporte (Japón)
1985 Primer chip difuso desarrollado por Masaki Togai y Hiroyuke Watanabe en los Laboratorios Bell (EE.UU.)
1986 Sistema experto difuso para el diagnóstico de enfermedades en Omron (Japón)
1987 Control de una manivela de un contenedor Túnel de excavación
Robot de soldadura
Tren automático de aterrizaje de una aeronave Segunda Conferencia de IFSA en Tokio
Togai InfraLogic Inc. - primera empresa difusa en Irvine (EE.UU.) 1988 Control de Kiln (horno o cámara térmica) por Yokogawa
Fue vendido el Primer controlador difuso Omron (Japón)
1989 Creación del Laboratorio para la Investigación Internacional de Ingeniería Difusa (en inglés International Fuzzy Engineering Research (LIFE)) en Japón 1990 Conjunto difuso de TV por Sony (Japón)
Ojo electrónico difuso por Fujitsu (Japón)
Instituto de sistemas de lógica difusa (en inglés Fuzzy Logic Systems Institute (FLSI)) por Takeshi Yamakawa (Japón)
Laboratorio de sistema de control inteligente en Siemens (Alemania) 1991 Centro de Promoción de IA difusa (Japón)
Kit Educacional de Motorola (EE.UU.) Después
1991-
![figura 2.1 presenta los puntos de estabilidad). En este caso, los puntos de equilibrio dependen en general del tipo y magnitud de las entradas y del estado inicial [15]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/21.612.154.474.116.370/presenta-estabilidad-equilibrio-dependen-general-magnitud-entradas-inicial.webp)
![Figura 2.4. para hidrogeneradores [15].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/26.612.139.494.371.714/figura-hidrogeneradores.webp)
![Figura 2.5. turbogeneradores [15].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/27.612.141.483.134.463/figura-turbogeneradores.webp)
![Figura 2.8. Oscilación angular del rotor [15].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/32.612.87.540.70.361/figura-oscilacion-angular-del-rotor.webp)
![Figura 3.3. Funciones de membresía [5].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/47.612.122.498.137.403/figura-funciones-de-membresia.webp)
![Figura 3.14. Cada regla define el valor de salida para un punto o zona en el espacio de entrada [17]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/59.612.118.508.81.324/figura-cada-regla-define-valor-salida-espacio-entrada.webp)
![Figura 3.15. La lógica difusa interpola entre valores constantes [17].](https://thumb-us.123doks.com/thumbv2/123dok_es/4984981.76360/60.612.138.484.68.332/figura-logica-difusa-interpola-valores-constantes.webp)