ECUACIONES EN
DIFERENCIAS
Las ecuaciones en diferencias permiten modelizar la evoluci´on en el tiempo de un sistema din´amico, tratando el tiempo n como una variable discreta.
2.1.
Introducci´
on
Un ejemplo sencillo para entender lo que es una ecuaci´on en diferencias lo encontramos en los cl´asicos problemas de inter´es compuesto:
Ejemplo 2.1. Supongamos que abrimos una cuenta en un banco con un inter´es del 10 % anual y sea an la cantidad de dinero en dicha cuenta en el a˜no n. Entonces, la
ecuaci´on que describe la variaci´on a˜no a a˜no de esta variable ser´a an+1 =an+ 0,1an,
es decir:
an+1 = 1,1an (2.1)
Esta ecuaci´on, que tambi´en se puede expresar como an+1−an = 0,1an, es lo que
se conoce como una “ecuaci´on en diferencias”, ya que en el lado izquierdo aparece la diferencia entre los valores que toma la variable an en dos instantes distintos (las
ecuaciones en diferencias, as´ı como las ecuaciones diferenciales que veremos en el Tema 2, nos dan informaci´on sobre la variaci´on de una o m´as variables en funci´on del tiempo).
Ahora, supuesto que hemos abierto la cuenta, por ejemplo, con 1000∈, tendr´ıamos:
a0 = 1000
a1 = 1,1a0 = 1100 a2 = 1,1a1 = 1210
· · ·
Obs´ervese que no decimos nada de lo que ocurre en los instantes intermedios, por ejemplo n = 0,5, pues la ecuaci´on no nos da ninguna informaci´on al respecto. En general, la soluci´on de una ecuaci´on en diferencias ser´a una funci´on A :Z+ →R, es decir, una sucesi´on de n´umeros reales. Decimos que manejamos el tiempo “de forma discreta” por el hecho de que se considera n ∈ Z+. En el Tema 2 veremos que la soluci´on de una ecuaci´on diferencial va a ser una funci´on R→R. Diremos en ese caso que manejamos el tiempo ”de forma continua”.
Volviendo al caso que nos ocupa, para conocer completamente la soluci´on de la ecuaci´on debemos calcular el t´ermino general de la sucesi´on correspondiente, en este caso ak = 1000(1,1)k. Ahora, si quisi´eramos saber cuanto dinero vamos a tener
en la cuenta dentro de 14 a˜nos s´olo tendr´ıamos que calcular: a14 = 1000(1,1)14 = 3797,498∈.
Obs´ervese tambi´en que si fuese a0 = 2000, tendr´ıamos a1 = 2200, a2 = 2420, etc. Es decir, la ecuaci´on 2.1 no tiene una ´unica soluci´on, sino que existe una soluci´on distinta por cada valor que tome a0. En general, dado a0, tendremos que la soluci´on correspondiente viene dada por la sucesi´onak =a0(1,1)k. Esta soluci´on, que se conoce como “soluci´on general”, no est´a completamente determinada pues depende de la constantea0. Sin embargo, s´ı lo estar´a si a˜nadimos una “condici´on inicial” que asigne un valor concreto a a0. En este caso, la ecuaci´on tendr´a una ´unica soluci´on que llamaremos “soluci´on particular” para dicha condici´on inicial.
Otro comentario que podemos hacer sobre el ejemplo anterior es que el mismo ra-zonamiento se puede aplicar para cualquier inter´esI que utilice el banco. En general, la soluci´on de la ecuaci´on ser´a ak = a0(1 +I)k. Decimos en este caso que I es un par´ametro de la ecuaci´on. Un interesante problema en el estudio de sistemas din´ami-cos es, dada una ecuaci´on que contiene un par´ametro, analizar como afecta el valor de dicho par´ametro a las soluciones de la ecuaci´on.
debida al hecho de que l´ımk→∞(1,1)k = ∞ mientras que l´ımk→∞(0,95)k = 0. Esto
implica que en el primer caso, en que el banco nos da un inter´es del 10 %, nuestro dinero en la cuenta crecer´a m´as y m´as sin l´ımite; sin embargo, en el segundo caso, en que el banco nos quita un 5 % cada a˜no, nuestro dinero ir´a disminuyendo con el tiempo y a largo plazo tendremos una cuenta vac´ıa. Es decir, el comportamiento a largo plazo del sistema cambia radicalmente dependiendo de que el par´ametro I sea mayor o menor que cero.
Una de las caracter´ısticas m´as importantes a estudiar en un sistema din´amico es el comportamiento a largo plazo (“comportamiento asint´otico”) de sus soluciones. M´as adelante veremos sistemas no lineales para los que no podemos conocer sus soluciones pero s´ı tenemos herramientas para estudiar su comportamiento asint´otico.
Veamos otro ejemplo de problema de inter´es compuesto:
Ejemplo 2.2. Supongamos ahora que el banco nos ha concedido un cr´edito de 3000∈
a un inter´es mensual del 6 %. Si ahora definimos an como el dinero que debemos al
banco en el mes n, tenemos que an+1 =an+ 0,06an = 1,06an. Supongamos tambi´en
que estamos pagando una letra mensual de 210∈; en ese caso la ecuaci´on del modelo ser´a:
an+1 = 1,06an−210 (2.2)
M´as adelante veremos que la soluci´on general de esta ecuaci´on es la sucesi´on ak =
(a0−3500)(1,06)k+ 3500 y, por tanto, la soluci´on particular para la condici´on inicial a0 = 3000 ser´a ak = 3500−500(1,06)k.
N´otese que l´ımk→∞ak=−∞, lo cu´al implica que en alg´un momentoak dejar´a de ser
positivo y por tanto habremos acabado de pagar la deuda. Es m´as, si despejamos k de la inecuaci´on 3500−500(1,06)k≤0, tenemos que k ≥33,395. . ., es decir, k ≥34,
lo cual significa que necesitaremos 34 meses para acabar de pagar la deuda.
Por otro lado, si en el ejemplo anterior hubi´esemos pedido un cr´edito inicial de a0 = 4000 ∈, tendr´ıamos que la soluci´on de la ecuaci´on es ak = 3500 + 500(1,06)k y por
tanto l´ımk→∞ak = ∞, luego nunca acabar´ıamos de pagar la deuda sino que ´esta
crece sin l´ımite. Este ejemplo ilustra la importancia que puede tener el estudio del comportamiento asint´otico de un sistema din´amico.
A lo largo de este tema haremos breve recorrido por toda la teor´ıa desarrollada en torno al estudio de las ecuaciones en diferencias. Empezaremos, en la secci´on 2.2 por identificar y clasificar los principales tipos de ecuaciones en diferencias que nos podemos encontrar. En la secci´on 1.3 veremos como calcular soluciones en los casos m´as sencillos. La secci´on 1.4 est´a dedicada al estudio del comportamiento asint´otico de los sistemas no lineales, la mayor´ıa de los cuales no sabemos resolver y, por ´ultimo, en la secci´on 1.5 veremos c´omo se pueden utilizar todos estos conceptos a la hora de estudiar la evoluci´on en el tiempo de una poblaci´on de seres vivos.
2.2.
Clasificaci´
on de las ecuaciones en diferencias
La forma de estudiar y resolver (cuando se pueda) una ecuaci´on en diferencias depende del tipo de ecuaci´on a que nos enfrentemos. Por eso, antes que nada es importante que sepamos identificar los distintos tipos de ecuaciones que podemos encontrarnos.
La forma general de una ecuaci´on en diferencias es:
an+1 =f(an, an−1, . . . , an−k+1, n) (2.3) En esta ecuaci´on hace referencia a los valores an−k+1, an−k+2, . . . , an−1, an y an+1. La diferencia por tanto entre el primer instante y el ´ultimo es k. Decimos por ello que es una ecuaci´on “de orden k”. Para obtener una soluci´on particular en una ecuaci´on de orden k son necesarias k condiciones iniciales.
Nosotros trabajaremos todo el tiempo con ecuaciones de orden 1, es decir, ecuaciones de la forma: an+1 = f(an, n). Como caso particular tendr´ıamos la ecuaci´on an+1 = f(an), en que el tiempo no aparece de forma expl´ıcita. Decimos entonces que la
ecuaci´on es “aut´onoma”. Otro caso particular ser´ıa una ecuaci´on de la forma:an+1 = f(an) +g(n). Es lo que se denomina una ecuaci´on “no homog´enea”.
Dentro de las ecuaciones aut´onomas de orden 1 trabajaremos en los siguientes casos:
Ecuaciones lineales. Son ecuaciones del tipo an+1 = ran, como la que aparec´ıa
Ecuaciones afines. Son ecuaciones del tipoan+1 =ran+b, como la que aparec´ıa
en el ejemplo 2.2. Se podr´ıan considerar tambi´en como ecuaciones no homog´eneas en las queg(n) es una constante.
Ecuaciones no lineales. Son ecuaciones del tipoan+1 =f(an), en que la funci´on
f es no lineal. No existen m´etodos generales para resolver ecuaciones de este tipo por lo que nos centraremos en el estudio de su comportamiento asint´otico.
Por ´ultimo veremos c´omo calcular soluciones para algunos casos sencillos de ecua-ciones no homog´eneas; concretamente aquellos en que la funci´ong(n) es un polinomio o una exponencial.
2.3.
C´
alculo de soluciones
En esta secci´on veremos como resolver ecuaciones en diferencias aut´onomas de orden 1 de tipo lineal y af´ın. En la ´ultima parte veremos tambi´en como podemos resolver algunas ecuaciones no homog´eneas.
2.3.1.
Ecuaciones lineales
Consideremos una ecuaci´on de la forma:
an+1 =ran (2.4)
Obviamente esta ecuaci´on da lugar a la sucesi´on:
a1 =ra0
a2 =ra1 =r2a0 a3 =ra2 =r3a0
· · ·
con t´ermino general ak =rka0
2.3.2.
Ecuaciones afines
Consideremos una ecuaci´on de la forma:
an+1 =ran+b (2.5)
En el caso r 6= 1 la soluci´on general ser´aak=crk+a donde a=
b 1−r.
Para comprobar que esto es cierto s´olo tenemos que sustituir en la ecuaci´on 2.5. El miembro de la izquierda ser´a:
an+1 =crn+1+a
El miembro de la derecha ser´a:
ran+b=r(crn+a) +b=crn+1+ra+b
Claramente ambos miembros son iguales ya queb = (1−r)a, luego la soluci´on que hemos dado verifica la ecuaci´on 2.5.
Por supuesto esto es una soluci´on general, ya que depende del par´ametro c. Ahora, dado un valor iniciala0, tendremos:
a0 =cr0+a =c+a ⇒c=a0−a
Por tanto, la soluci´on particular para un valor iniciala0 ser´a entonces
ak = (a0−a)rk+a donde a= b
1−r (2.6)
En el casor= 1 la ecuaci´on 2.5 se convierte enan+1 =an+b, luego, obviamente,
ser´a:
ak =a0+kb
Ejemplo 2.3. La ecuaci´on del ejemplo 2.2 era una ecuaci´on af´ın con r = 1,06, b = −210 y a0 = 3000. Sustituyendo estos valores en 2.6 comprobamos que a =
−210
−0,06 = 3500, luego la soluci´on de esta ecuaci´on esak = (3000−3500)(1,06)k+ 3500 = 3500−500(1,06)k.
2.3.3.
Ecuaciones no homog´
eneas
En este apartado calcularemos soluciones para ecuaciones de la forma an+1 = ran+g(n) en los casos en que:
g(n) es un polinomio de la forma: g(n) =pmnm+· · ·+p1n+p0
g(n) es una funci´on exponencial de la forma: g(n) =bsn
Caso 1: an+1 =ran+pmnm+· · ·+p1n+p0
Igual que ocurr´ıa en el caso af´ın, la soluci´on ser´a distinta dependiendo de que sea r= 1 o r 6= 1.
En el caso r 6= 1 la soluci´on ser´a de la forma:
ak =crk+bmkm+· · ·+b1k+b0
Los par´ametros b0, b1, . . . , bm se calcular´an sustituyendo en la ecuaci´on.
Final-mente el par´ametrocse obtendr´a como siempre, a partir de la condici´on inicial.
Ejercicio:Resolver la ecuaci´on: an+1 = 3an+ 2n+ 5 con a0 = 8. En el caso r = 1 la soluci´on ser´a de la forma:
ak =bm+1km+1+· · ·+b1k+c
Los par´ametros b1, b2, . . . , bm+1 se calcular´an sustituyendo en la ecuaci´on. El par´ametro cse obtendr´a a partir de la condici´on inicial.
Ejercicio:Resolver la ecuaci´on: an+1 =an+n+ 1 cona0 = 0.
Caso 2: an+1 =ran+bsn
En este caso la forma de obtener la soluci´on depender´a de que sea r =s o r6=s.
En el caso r 6=s la soluci´on ser´a:
ak =crk+ask donde a= b
s−r
El par´ametroc se obtendr´a a partir de la condici´on inicial.
En el caso r =s la soluci´on ser´a:
ak = (c+ak)rk donde a =
b r El par´ametroc se obtendr´a a partir de la condici´on inicial.
Ejercicio:Resolver la ecuaci´on: an+1 = 3an+ 6·3n con a0 = 5.
Ejercicios: Resolver las ecuaciones:
an+1 = 3an+ 3n+ 4n con a0 = 0.
an+1 = 2an+ 3n+n+ 1 cona0 = 2. an+1 =an+ 2n+n con a0 = 1.
an+1 = 2an+ 2n+n con a0 = 1.
2.4.
Comportamiento asint´
otico de los sistemas
dis-cretos
En esta secci´on introduciremos algunos conceptos y procedimientos que nos permi-tir´an llevar a cabo el “an´alisis cualitativo” de un sistema discreto, es decir, nos per-mitir´an conocer el comportamiento asint´otico del sistema sin necesidad de resolver de forma exacta su ecuaci´on. M´as adelante veremos que en muchos sistemas no lineales este tipo de an´alisis es la ´unica alternativa viable.
Una vez introducidos los principales conceptos, los aplicaremos al estudio del com-portamiento asint´otico de sistemas lineales y afines gen´ericos. Por ´ultimo veremos algunas t´ecnicas muy ´utiles para trabajar con sistemas no lineales y las pondremos en pr´actica sobre diversos ejemplos.
2.4.1.
Puntos de equilibrio y estabilidad
Definici´on 2.1. Dada una ecuaci´on en diferencias aut´onoma de la forma an+1 = f(an), se dice que a∈R es un “punto de equilibrio” del sistema si:
Ejercicio Comprobar que en la ecuaci´on del ejemplo 2.2 el punto a = 3500 es un punto de equilibrio.
Teorema 2.1. Dada una ecuaci´on aut´onoma de la forma an+1 = f(an), el punto
a∈R es un punto de equilibrio si y s´olo si se cumple que f(a) =a.
A continuaci´on veremos con un ejemplo que no todos los puntos de equilibrio son iguales:
Ejemplo 2.4. Consid´erese el sistema af´ın an+1 = 1,01an −20. Para calcular sus
puntos de equilibrio hacemos:
f(a) = a⇒1,01a−20 = a⇒0,01a= 20⇒a= 2000
Por otro lado, aplicando 2.6, tenemos que la soluci´on del sistema ser´a:
ak= (a0−2000)(1,01)k+ 2000
Efectivamente comprobamos que si a0 = 2000 entoncesak = 2000 ∀k ∈N.
Por otra parte, el hecho de que l´ımk→∞(1,01)k =∞ hace que en el momento en que
a0 se separe del valor a = 2000, por peque˜na que sea esta separaci´on, ak se vaya
alejando m´as y m´as del punto de equilibrio a medida que crece k. Decimos por ello que a= 2000 es un “equilibrio inestable”.
Ejemplo 2.5. Consid´erese un sistema parecido al anterior: an+1 = 0,99an + 20.
Procediendo como antes comprobamos que el ´unico punto de equilibrio vuelve a ser a= 2000. A su vez, la soluci´on del sistema ser´aak = (a0−2000)(0,99)k+2000, tambi´en muy parecida a la del ejemplo anterior. Sin embargo hay una diferencia sustancial y es que ahora l´ımk→∞(0,99)k = 0. Esto implica que si cogemos un valor para a0 distinto dea = 2000 pero suficientemente cercano, tendremos que:
l´ım
k→∞ak = 2000
es decir, la soluci´on, a largo plazo, se acercar´a m´as y m´as al punto de equilibrio. Decimos en este caso que a= 2000 es un “equilibrio estable”.
Definici´on 2.2. Sea a un punto de equilibrio del sistema an+1 =f(an). Se dice que
a es un “equilibrio estable” si existe ε >0 tal que:
|a0−a|< ε⇒ l´ım
Figura 2.1: Equilibrios estable e inestable, ¿cu´al es cu´al?
Definici´on 2.3. Sea a un punto de equilibrio del sistema an+1 =f(an). Se dice que
a es un “equilibrio inestable” si existe ε >0 tal que:
0<|a0−a|< ε⇒ ∃k >0 tal que |ak−a|> ε
2.4.2.
Comportamiento asint´
otico de sistemas lineales y afines
Consideremos el sistema lineal de la ecuaci´on 2.4: an+1 = ran. Resolviendo la
ecuaci´on del teorema 2.1, tenemos:
f(a) = ra=a⇒a= 0 ´o r= 1
El casor = 1 es un caso trivial ya que la ecuaci´on se convierte en: an+1 =an, lo cual
significa que, dado cualquier valor inicial a0, el sistema se mantiene siempre en ese mismo valor, es decir, cualquier puntoa∈Res punto de equilibrio de dicha ecuaci´on.
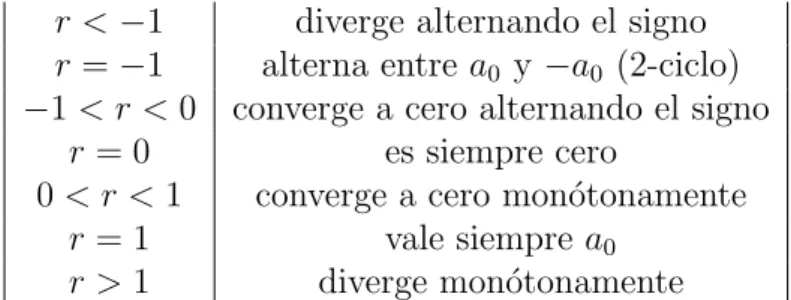
En general, para cualquier r 6= 1, el ´unico punto de equilibrio ser´a a = 0. Para estudiar su estabilidad debemos recordar que, seg´un se vio en el tema anterior, la soluci´on general de este sistema es ak = a0rk. A partir de esta soluci´on se deduce f´acilmente cu´al ser´a su comportamiento asint´otico, que resumimos en la siguiente tabla:
r <−1 diverge alternando el signo r=−1 alterna entre a0 y −a0 (2-ciclo)
−1< r <0 converge a cero alternando el signo
r = 0 es siempre cero
0< r <1 converge a cero mon´otonamente
r = 1 vale siempre a0
Podemos decir por tanto que a = 0 es siempre un punto de equilibrio del sistema cuya estabilidad depender´a del valor de r. Concretamente se tiene:
|r <1| ⇒a= 0 es un equilibrio estable.
|r >1| ⇒a= 0 es un equilibrio inestable.
r = −1 ⇒ a = 0 es lo que llamamos un “equilibrio neutro”, ya que ak no se
acerca ni se aleja de ´el.
r= 1 ⇒Todo a ∈R es un equilibrio neutro.
Consideremos ahora el sistema af´ın de la ecuaci´on 2.5:an+1 =ran+b. Aplicando otra
vez el teorema 2.1, tenemos:
f(a) = ra+b=a⇒a(1−r) = b⇒a= b 1−r
luego tenemos que el ´unico punto de equilibrio ser´a a= b
1−r, siempre por supuesto que sea r6= 1.
En el caso r= 1 la ecuaci´on se convierte en an+1 =an+b. Obviamente este sistema
crece (o decrece si b < 0) indefinidamente sea cual sea la condici´on inicial, luego no tiene puntos de equilibrio.
Volviendo al casor6= 1, para estudiar la estabilidad del punto de equilibrio tendremos que recurrir al mismo m´etodo que en el caso lineal. En el tema anterior vimos que en este caso la soluci´on del sistema es: ak =crk+a donde a =
b
1−r es el punto de equilibrio.
A partir de esta soluci´on se llega inmediatamente a la siguiente tabla:
r <−1 diverge alternando el signo r=−1 alterna entre a0 y b−a0 (2-ciclo)
−1< r <0 converge al p.e. alternando el signo
r = 0 es siempre a
0< r <1 converge al p.e. mon´otonamente r ≥1 diverge mon´otonamente
|r <1| ⇒a es un equilibrio estable.
|r >1| ⇒a es un equilibrio inestable.
r=−1⇒a es un equilibrio neutro.
La principal diferencia est´a en que en el caso r = 1 el sistema deja de tener puntos de equilibrio.
2.4.3.
Comportamiento asint´
otico de sistemas no lineales
Una herramienta muy ´util para estudiar el comportamiento asint´otico de los sistemas no lineales es el “gr´afico de telara˜na” (“cobweb”). En ´el se pueden reconocer clara-mente los puntos de equilibrio y distinguir si son estables, inestables, semiestables, etc. Veamos algunos ejemplos:
Ejemplo: Representar el gr´afico de telara˜na de las siguiente ecuaciones:
an+1 = 0,8an con a0 =−1 y 1. an+1 = 2an con a0 =−1 y 1. an+1 =−0,8an con a0 =−1 y 1. an+1 =−2an con a0 =−1 y 1. an+1 =−an con a0 = 1.
Como acabamos de ver, en los sistemas lineales la funci´on f es una recta que pasa por el origen y ´este es el ´unico punto de equilibrio. Adem´as su estabilidad depende de que sea |r|<1 o |r|>1(donde r es la pendiente de la recta). Veamos m´as ejemplos:
an+1 = 1,5an−1 con a0 = 1 y 3. an+1 =−an+ 4 cona0 = 3 y 5. an+1 = (an+ 4)an+ 2.
1 1
1
0.8
0
y=x
y= 0.8x
Figura 2.2: Gr´afico de telara˜na del sistema an+1 = 0,8an para a0 = 1
Proposici´on 2.1. Sea an+1 =f(an)un sistema aut´onomo con un punto de equilibrio
a∈R y sea f derivable en a. Entonces se tiene que:
a. |f0(a)|<1⇒a es un equilibrio estable.
b. |f0(a)|>1⇒a es un equilibrio inestable.
Los casos en que f0(a) = 1 (caso C) o f0(a) = −1 (caso D) hay que estudiarlos m´as
detenidamente. Analizando m´as ejemplos con la ayuda de los gr´aficos de telara˜na observamos que en el caso C tenemos que recurrir al estudio de la 2a derivada (f00(a)),
si es que existe. En tal caso se tiene:
a. f00(a)<0⇒a es un equilibrio semiestable por la derecha.
b. f00(a)>0⇒a es un equilibrio semiestable por la izquierda.
Todav´ıa, si f00(a) = 0 tendremos que recurrir al estudio de la 3a derivada (f000(a)) y
ahora:
a. f000(a)<0⇒a es un equilibrio estable.
1
y=−0.8x
y=x
Figura 2.3: Gr´afico de telara˜na del sistema an+1 =−0,8an para a0 = 1
Para finalizar veamos qu´e ocurre en el caso D, es decir, cuando f0(a) =−1. En estos
casos el gr´afico de telara˜na adquiere un aspecto de espiral, similar al del ejemplo de la figura 2.4.3, que refleja el hecho de que las soluciones, en un entorno del punto de equilibrio, se sit´uan por encima y por debajo de ´el, alternativamente en cada paso de tiempo. Sin embargo esta espiral puede crecer hacia dentro (equilibrio estable) o hacia fuera (equilibrio inestable). Necesitamos un m´etodo que nos permita discernir en qu´e caso nos encontramos; el que proponemos a continuaci´on se basa en el estudio de las sucesiones a0, a2, a4. . .y a1, a3, a5. . ..
Consideremos la ecuaci´onan+2 =g(an) dondeg =f◦f. Obs´ervese que esta ecuaci´on
(de 2o orden) determina los t´erminos pares de nuestro sistema, a
2, a4, a6. . ., a partir de a0. Del mismo modo, conocido a1, nos permite obtener los t´erminos impares, a1, a3, a5. . ..
Se demuestra f´acilmente que todo punto de equilibrio del sistema an+1 =f(an) lo es
tambi´en del sistema an+2 =g(an). Adem´as, si f es continua, entonces las estabilidad
de dichos puntos de equilibrio es la misma en ambos sistemas. Esto significa que podemos estudiar la estabilidad dea a partir deg0(a), g00(a), g000(a),etc.
g00(a) = 0, luego necesitamos calcular la 3a derivada: g000(a) =−2f000(a)−3[f00(a)]2
Sig000(a)<0 esto querr´a decir que a es un equilibrio estable. Asimismo, si g000(a)>0
deberemos entender que a es un equilibrio inestable.
Ejercicio: Hacer un an´alisis cualitativo de los siguientes sistemas:
an+1 = 0,8an−a3n.
an+1 = 4a3n.
an+1 =a3n−a2n+ 1.
an+1 =an−a3n.
an+1 =−an+ 2a2n.
an+1 = 3,2an−0,8a2n.
Ejercicio:Hacer un an´alisis cualitativo del sistema an+1 =−ban+a3n en funci´on del
par´ametro b.
Ejercicio: Hacer un an´alisis cualitativo del sistema an+1 = αane−an en funci´on del
par´ametro α.
2.5.
Modelos de crecimiento poblacional
En esta secci´on veremos c´omo aplicar las t´ecnicas que hemos desarrollado a lo largo del tema para el estudio de sistemas din´amicos discretos, al an´alisis de modelos de din´amica de poblaciones muy utilizados en Biolog´ıa.
de mortalidad del 10 %. Esto implica, si suponemos que no hay “migraci´on”, que la variaci´on en el tama˜no de la poblaci´on entre dos periodos consecutivos ser´a:
an+1 =an+ 0,3an−0,1an = 1,2an
En general, dada una tasa de natalidad b y una tasa de mortalidad d tendr´ıamos que la evoluci´on en el tiempo de esta poblaci´on queda determinada por la ecuaci´on an+1 = (1 +r)an siendo r =b−d la llamada “tasa de crecimiento” de la poblaci´on.
Seg´un hemos visto en secciones anteriores ´esta es una ecuaci´on lineal con soluci´on ak = a0(1 +r)k. Podemos decir que esta poblaci´on experimentar´a un crecimiento exponencial sin l´ımite o decrecer´a (tambi´en exponencialmente) hasta la extinci´on dependiendo de que sea r > 0 ´o r < 0, y esto ocurrir´a as´ı con independencia de su tama˜no inicial.
Este modelo fue planteado por Malthus en 1778. Es un modelo muy simple pero poco realista; el mismo hecho de que una poblaci´on pueda crecer sin l´ımite lo hace poco fiable a la hora de establecer predicciones a largo plazo. Su mayor simplificaci´on reside en considerar una tasa de crecimiento constante a lo largo del tiempo; esto se puede suponer para periodos cortos de tiempo pero no a largo plazo.
Una mejora sustancial en este sentido la proporcionan los modelos “dependientes de la densidad”. En estos modelos se supone que la tasa de crecimiento var´ıa en funci´on del tama˜no de la poblaci´on o, m´as exactamente, de la densidad de poblaci´on en la zona. Esta suposici´on es perfectamente plausible pues obviamente la “capacidad” de crecimiento de una poblaci´on depende de la cantidad de recursos disponibles (agua, comida, luz, etc.) y en una zona densamente poblada cabe esperar que dichos recursos lleguen a escasear.
Posiblemente el m´as conocido y utilizado de los modelos dependientes de la densi-dad es el “modelo log´ıstico”. Este modelo parte del de Malthus, an+1 = (1 +R)an,
pero ahora la tasa de crecimiento, R, es funci´on del tama˜no de la poblaci´on en cada instante:
R =R(an) = r(1−
an
L)
donde los par´ametros r y L representan la “tasa de crecimiento sin restricciones” y la “capacidad del medio” respectivamente.
Si analizamos la f´ormula anterior vemos que:
A medida que crece la poblaci´on el t´ermino (1−an/L) va disminuyendo, y con
´el la tasa de crecimiento.
Si el tama˜no de la poblaci´on llega a coincidir con la capacidad del medio (es decir, la cantidad de individuos que puede soportar el medio) la tasa de crec-imiento se hace cero.
Si se supera la capacidad del medio la tasa de crecimiento se hace negativa y la poblaci´on empieza a decrecer.
La ecuaci´on de este modelo queda entonces:
an+1−an=r(1−
an
L)an
que tambi´en se puede expresar como:
an+1 = (1 +r)an−ba2n
siendo b =r/L. Es decir, esta ´ultima ecuaci´on es igual que la de Malthus, pero se le ha a˜nadido el llamado “t´ermino regulador”:−ba2
n.
Ejercicio:Fijada una capacidad del medioL, hacer un an´alisis cualitativo del modelo log´ıstico en funci´on del par´ametro r.
Ejercicio: Consid´erese un modelo de recolecci´on del tipo:
an+1−an= 0,5(1−an)an−b
Hacer un an´alisis cualitativo de este modelo en funci´on del par´ametro b.
Ejercicio: Consid´erese un modelo de recolecci´on del tipo:
an+1−an = 0,5(1−0,5an)an−han