INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECANICA Y
ELECTRICA
UNIDAD PROFESIONAL “ADOLFO LOPEZ MATEOS”
INGENIERIA EN COMUNICACIONES Y ELECTRONICA
“
Comunicación móvil aplicada al Robot Scara
”
TESIS
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRONICA
PRESENTAN:
Jonathan Espinosa Rodríguez
Rocío Juárez Trujano
ASESORES:
Ing. María Aurora Segura Corona
M. en C. Pedro Gustavo Magaña del Río
Wxw|vtàÉÜ|tá
A mi madre Josefina
la mujer más linda de
mundo, aquella que siempre me comprendió, que
siempre me apoyó a pesar que en muchas de las
ocasiones no pudiera hacerlo como lo hubiese deseado y
que a pesar de todo, aun cuando no se diera cuenta de
ello, fué el apoyo más grande en mi carrera, porque
siempre creyó en mí y nunca perdió las esperanzas de
que yo alguna vez lo lograra y ahora me doy el lujo de
decirle por fin llegué después de tantos años y múltiples
esfuerzos alcancé la meta que una vez me propuse hace
mucho tiempo.
A mi padre Armando
quien me demostró que en
esta vida se sufre pero también se puede luchar con la
misma fuerza, que a pesar de todo lo más importante en la
vida es disfrutarla mientras aun estemos, que la vida no
está hecha de lujos y si eso es lo que se desea se tiene
que luchar por ello; que cada cosa en este mundo cuesta
y nada mejor que saber cuánto cuesta ganarlo, lograrlo y
alcanzarlo.
A mi hermano Ulises
aquel hombre que ahora después de tanto creer en
mí, en secreto por no mostrar la parte noble que tiene, aquel que siempre mostró
que no le importaba pero que siempre estuvo al tanto de lo que sucedía; ahora
que ha elegido su camino lo apoyaré tanto como él lo hizo conmigo; que para eso
estamos los dos que a pesar que frente al público no nos mostremos afectuosos
siempre que uno necesite del otro allí estaremos para apoyarnos.
Gracias a todos
por el apoyo brindado
Wxw|vtàÉÜ|tá
A la vida
Por permitirme llegar a este momento tan especial en mi
vida. Por los triunfos y los momentos difíciles que me han
enseñado a valorar cada día más y sobre todo porque
me ha enseñado que en cada caída hay una nueva
oportunidad para crecer. Agradezco por cada momento
vivido ya que son los que me han convertido en la mujer
que soy ahora, que ve cada obstáculo como una nueva
oportunidad en la que puedo superarme día a día y sobre
todo, que tengo las fuerzas necesarias para sobrellevar
esta vida que está llena de sorpresas.
A mi familia
Hoy escribo estas palabras, a quienes dedico cada
esfuerzo que lleve a lo largo de tantos años, donde
hubieron momentos difíciles los cuales pese a ser lo que
fueran salimos adelante, y por lo cual ahora somos lo que
somos, este trabajo representa una vida entera llena de
sacrificios pero siempre con una meta fija, y sobre todo
representa una vida que seguiremos enfrentando día a día,
hoy nos esperan nuevos retos a superar y nuevas
esperanzas de vida, porque hoy gracias a ustedes me he
convertido en una mujer capaz de superar cada obstáculo
con la frente en alto y con la mejor herencia que me
pudieron dar una carrera, pese que en un principio era
bastante difícil supere semestre a semestre siempre dando
lo mejor de mí, aunque muchas veces no llegaban a
comprender lo que hacía, y solo veía caras de entusiasmo
cada vez que lograba encender un foquito o después de
una noche entera y encontrar el piso lleno de colores por
cables que volaban, supieron entender que todo ese
tiradero valió la pena y ahora lo veremos plasmado entre
estas líneas.
TzÜtwxv|Å|xÇàÉá
Quiero agradecer
a todas esas personas
que he hallado a lo largo de mi
vida, que han representado una parte importante en mi vida que siempre han
creído en mi, que me han apoyado y confiado a pesar de lo poco que llegaron a
conocerme, cada compañero en lo largo de mi carrera aun que algunos de ellos
llegasen a desertar he irse a otras instituciones pero que aun, recuerdan los
momentos que pasaron aun, lado de un servidor que a pesar de esa distancia aun
estamos en contacto.
A aquellos a quienes hice alguna vez enojar
o hartarse de mi carácter
pero que aun así los aprecio por brindarme la madurez que necesitaba a lo largo
de mi camino haciéndome razonar en cada una de mis decisiones y a pesar de lo
necio y obstinado de mi carácter nunca me dejaron solo y vieron un apoyo en mi; a
aquellos compañeros de quienes poco a poco logre ganarme su aprecio.
A mis amigos
que nunca desconfiaron de mí, que siempre que necesite
apoyo estuvieron a un lado mío, aquellos que a pesar de la distancia me
demostraron que siempre estuvieron cerca estirando la mano para brindarme su
apoyo, a aquellos que encontré en los lugares más extraños, que resultaron ser
las personas más amables y que de las cuales sentí un cariño incondicional sin
pedirme nada a cambio; todos me obsequiaron lo más valioso que tenían que es
su amistad y ese apoyo que los caracterizaba y que en los momentos más difíciles
tanto de mi vida como de mi carrera supieron sin necesidad de un aviso que
necesitaba ayuda, gracias. Realmente no tengo como agradecerles todo.
Por último y por ello no menos importante
, a las
personas que me hicieron
de mí el hombre que soy
y dándome siempre a entender que en este mundo
todo es posible; solo se debe luchar por ello.
TzÜtwxv|Å|xÇàÉá
Me gustaría que estas líneas sirvieran para expresar mi más profundo y sincero
agradecimiento,
a todas aquellas personas
que con su ayuda han
colaborado en la realización del presente trabajo, que no, solo representa la
finalización de mis estudios profesionales, si no que representa la lucha constante
de alcanzar un sueño, un sueño donde la meta era difícil de alcanzar, sin embargo
la lucha del día y día, hizo posible la realidad de este sueño.
La presente Tesis es un esfuerzo en el cual, directa o indirectamente, participaron
varias personas leyendo, opinando, corrigiendo, teniéndome paciencia, dando
ánimo, acompañando en los momentos de crisis y en los momentos de felicidad.
Un agradecimiento muy especial merece la comprensión, paciencia y el ánimo
recibidos de
mi familia y amigos
.
A mis maestros
gracias por su tiempo, por su apoyo así como por la sabiduría
que me transmitieron en el desarrollo de mi formación profesional, en especial:
al
Ing. Pedro Gustavo Magaña
que me dio ese impulso para seguir adelante
ya que, por su apoyo ofrecido en los momentos difíciles, es como se llego a la
conclusión de este trabajo, gracias por cada consejo y sobre todo por cada jalón
de orejas que nos llevamos en el transcurso de dos semestres, los cuales a veces
parecían una pesadilla por cada situación que se nos presentaba y las
complicaciones que tuvimos en la realización de esta tesis.
Por último y no por eso menos importante quiero dar las gracias al
Instituto
Politécnico Nacional
, donde me he formado a través de tantos años, esta ha
sido la casa que me enseño a desarrollarme profesionalmente, es mi institución
querida que sin dudarlo por la cual puede estar orgulloso, porque es un honor
decir de donde provengo y decir que soy orgullosamente politécnico.
Co u icació Móvil
Aplicada al Robot
El objetivo del presente proyecto es continuar con el proceso de mejora continua del Robot SCARA, con la implementación de la comunicación inalámbrica.
El proyecto tiene como meta implementar una solución móvil de telecomunicaciones para que el Robot SCARA pueda tener un alcance, un movimiento de manera inalámbrica, lo que permitirá un ajuste preciso del robot.
El Robot SCARA permitirá conseguir la misma tarea repetitiva en un corto tiempo y lo efectuará de forma automática, es decir, programado previamente.
Índice
INTRODUCCIÓN
ANTECEDENTES
Capítulo I Conceptos fundamentales
Definición de robot
4
Robótica
5
Estructura y características generales de los Robots
6
El manipulador
6
El control
9
Sistemas sensitivos
10
Tipos de Robots
10
Estado actual de la robótica
12
Capítulo II Robot SCARA
Introducción
15
Elementos que conforman al SCARA
15
Configuracion de los ejes principales
16
Configuración de SCARA (RRP)
17
Configuración cilíndrica (RPP)
18
Configuración cartesiana PPP
20
Manipulador paralelo
22
Estructura mecánica
23
Actuadores y transmisiones
24
Accionamiento neumático
25
Capítulo III Comunicación Inalámbrica
Red inalámbrica
27
WIFI
28
Protocolo 802.11
29
Protocolo 802.15
30
Clasificación según el tipo de transferencia
34
Transmisión inalámbrica
34
Microondas terrestres
35
Microondas por satélite
35
Espectro infrarrojo (IR)
36
Transición por ondas de luz
36
Ondas de radio
36
Topologías de red
37
Topología Broadcast
38
Topología Token
38
Topología en conexión total (malla completa)
38
Topología en malla
39
Topología en árbol
40
Topología estrella
41
Topología estrella extendida
42
Especificación del servicio
44
Capítulo IV Implementación
Introducción
47
Implementación de la solución
49
El coordinador
52
Los Routers
52
End device
53
Modos de operación
54
Modo Recibir/Transmitir
55
Modo de bajo consumo (Sleep Mode)
56
Pin de Hibernación
56
Pin Doze
56
Modo de sueños cíclicos
57
Sueño cíclico Remoto
57
Sueño cíclico remoto y pin para despertar (SM=5)
57
Coordinador de sueño
58
Modo transparente
58
Plataforma de desarrollo
60
16F877A
65
HL293D
66
4N35
68
Capitulo “V” Conclusiones Y Recomendaciones
Conclusión
71
Recomendaciones
72
Anexos y Tablas
Glosario
Instituto Politécnico Nacional
E S I M E
VIII |
Página
INTRODUCCIÓN
El uso de las tecnologías en los sistemas de comunicación se ha convertido en uno de los requerimientos básicos para el desarrollo de los procesos de enseñanza - aprendizaje ya que la aceleración rápida de los avances tecnológicos lleva a observar este vertiginoso cambio.
La comunicación, de una u otra forma se dio, pero se sabe que fue simplemente por necesidad de la trasferencia de información.
Instituto Politécnico Nacional
E S I M E
X |
Página
ANTECEDENTES
El transcurso del tiempo exhibe a una sociedad que día a día requiere de una rápida conversión y actualización de los datos que maneja en sus diversas áreas. Para lograr mayor eficiencia en el desempeño de sus roles, es necesario reducir a su más mínima expresión los intervalos entre la captura, transporte almacenamiento y procesamiento de información. Empresas que contemplan dentro de su estructura decenas de oficinas dispersas en una amplia dimensión geográfica, demandan realizar exámenes rutinarios del estado actual de todas ellas, simplemente consultando el computador en el menor tiempo posible. A medida que crece la habilidad para recolectar procesar y distribuir información, la demanda de contar con elementos de procesamiento de información más sofisticados crece conjuntamente.
C
APÍTULO I
“
Conceptos
Instituto Politécnico Nacional
E S I M E
2 |
Página
CAPITULO I
“CONCEPTOS FUNDAMENTALES”
La palabra Robot procede del checo Robota, que significa trabajo forzado. Lo utilizó por primera vez Karel Capek, un dramaturgo y autor checoslovaco, en la década de 1920. La definición de la palabra Robots, afirmaría que son dispositivos mecánicos que a veces recuerdan a seres humanos y son capaces de realizar diversas tareas humanas.
Los Robots tal y como se conocen actualmente, fueron desarrollados después de la Segunda Guerra Mundial. En 1947 comenzaron las primeras investigaciones, lideradas por Raymond Goertz del Argonne National Laboratory en Estados Unidos, encaminadas al desarrollo de algún tipo de manipulador de fácil manejo a distancia, mediante el uso por parte del operador de otro manipulador equivalente. El primer fruto se obtuvo en 1948 con el desarrollo del primer manipulador teleoperado mecánico, denominado M1, antecesor de toda la familia de sistemas maestro-esclavo de telemanipulación existentes actualmente.
El mecanismo de este sistema permitía, que la pinza situada en el extremo del manipulador esclavo, reprodujera de forma fiel los movimientos hechos por la mano del operador al extremo del manipulador maestro. Ambos manipuladores eran prácticamente iguales, y los movimientos entre ambos se reproducían eje a eje, de tal manera que el extremo de ambos describiese la misma trayectoria.
Años más tarde, en 1954, Goertz hizo uso de la electrónica y del servocontrol sustituyendo la transmisión mecánica por eléctrica y desarrollando así el primer telemanipulador con servocontrol bilateral. Otro de los pioneros de la telemanipulación fue Ralph Mosher, Ingeniero de la General Electric en 1958 desarrollo un dispositivo denominado Handy-Man, consistía en dos brazos mecánicos teleoperados mediante un maestro del tipo denominado exoesqueleto. Junto a la industria nuclear, a lo largo de los años sesenta la industria submarina comenzó a interesarse por el uso de los telemanipuladores.
En 1968 J.F. Engelberger visito Japón y poco más tarde se firmaron acuerdos con Kawasaki para la construcción de Robots tipo Unimate. El crecimiento de la robótica en Japón aventaja en breve a los Estados Unidos gracias a Nissan, que formo la primera asociación robótica del mundo, la Asociación de Robótica industrial de Japón (JIRA) en 1972. Dos años más tarde se formó el Instituto de Robótica de América (RIA), que en 1984 cambio su nombre por el de Asociación de Industrias Robóticas, manteniendo las mismas siglas (RIA).
En Europa hubo un despertar más tardío. En 1973 la firma sueca ASEA construyo el primer robot con accionamiento totalmente eléctrico, en 1980 se fundó la Federación Internacional de Robótica con sede en Estocolmo Suecia. La configuración de los primeros robots respondía a las denominadas configuraciones esférica y antropomórfica, de uso especialmente valido para la manipulación. En 1982, el profesor Makino de la Universidad Yamanashi de Japón, desarrolla el concepto de robot SCARA (Selective Compliance Assembly Robot Arm) donde se requería un robot con un número reducido en grados de libertad (3 o 4), un coste limitado y una configuración orientada al ensamblado de piezas.
En paralelo con la evolución histórica de las técnicas de teleoperación ha habido una evolución tecnológica motivada por los desarrollos de control, la informática y la robótica. Ha habido, por una parte una evolución en los sistemas de comunicación, pasando de los sistemas mecánicos a los eléctricos, fibra óptica, radio e Internet, medio que suprime prácticamente las limitaciones de distancia.
Los primeros robots que se desarrollaron solo tuvieron un enfoque, el de entretener a sus dueños. Los inventores solo se dedicaban a complacer a quienes los pedían, tiempo después se observo que podían tener, un poco más de funcionalidad, ya que se logró ver que podían tener ciertas características humanas, como reproducir algunas funciones motrices, a este tipo de proceso se le conoce como automatización, ya que permite la eliminación total o parcial, de la intervención del hombre. Existen diferentes tipos de automatizados algunos por mencionar son eléctricos, hidráulicos, neumáticos.
Instituto Politécnico Nacional
E S I M E
4 |
Página
Definición de Robot:
En la actualidad se encuentran tantas definiciones de robot como se deseen, pero se tomaran dos definiciones formales de algunas de las organizaciones más importantes en la actualidad, la primera definición proviene de la ISO (International Standards Organization) que ha adoptado con ligeras modificaciones la definición de la RIA (Robotics Industrial Association). Según la definición de ISO, un robot industrial es:
“Un manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular
cargas, piezas, herramientas, o dispositivos, especiales, según trayectorias variables programadas
para realizar tareas diversas”
Otra de las definiciones más aceptadas es la dada por la IFR (Internacional Federation of Robotics), según la cual un robot industrial es:
“Es una máquina de manipulación automática programable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas herramientas o dispositivos especiales para la realización de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento”
En definitiva, un robot está constituido por una serie de elementos móviles (puede ser en forma de brazo articulado) accionado cada uno de estos por un motor (en general eléctrico) y cuyos movimientos son programados mediante un ordenador, al final del brazo, los robots llevan elementos tales como una garra, una ventosa, o un electroimán, en el caso que tengan que manipular piezas, si no se tratase de este caso, algunos robots tienen como fin, hacer agujeros o atornillar, los elementos terminales podrían ser como una broca o un atornillador. Esto es importante saberlo, ya que hay que tener en cuenta cual va a ser la finalidad del proyecto así como su uso.
En el presente proyecto cabe resaltar que solo se percibe al robot como una alternativa y se compara con opciones automáticas que pueden simplificar algunas tareas, en este sentido es importante, ya que hay muchos aspectos negativos por parte de la sociedad, debido a la reducción de empleo, esto tiene dos contraposiciones positivas: la creación de puestos de trabajo relacionados con la robótica y accesorios, y la mejora de las condiciones laborales. Esto último se debe a que los robots se dedican principalmente a tareas que se encuentran dentro de la regla 3D, que significa Dull – Dirty –
Heavy – Hazardous (temperaturas elevadas, piezas pesadas, ambientes peligrosos). Es así como podemos ver a los
robots
como una inversión menor, debido a lo ya antes mencionado, dando mejores resultados, mejor precisión, mayor velocidad.Robótica
La robótica es una tecnología multidisciplinar ya que esta hace uso de los recursos que le proporcionan otras ciencias, la robótica hace uso de muchas ciencias como por ejemplo: las matemáticas, la informática, la mecánica, la eléctrica, etc. Dentro de la robótica existen tres leyes que son un conjunto de normas escritas por Isaac Asimov, que la mayoría de los robots de sus novelas y cuentos están diseñados para cumplir. En ese universo, las leyes son “Formulaciones matemáticas impresas en los senderos positrónicos del cerebro”. Aparecidas por primera vez en el libro “Runaround” (1942), donde se establece lo siguiente:
1. Un robot no debe dañar a un ser humano o, por inacción, dejar que un ser humano sufra daño.
2. Un robot debe obedecer las órdenes que le son dadas por un ser humano, excepto si estas órdenes entran en conflicto con la primera ley.
3. Un robot debe proteger su propia existencia, hasta donde esta protección no entre en conflicto con la primera o segunda ley.
Instituto Politécnico Nacional
E S I M E
6 |
Página
Estructura y características generales de los Robots
El esquema básico de un robot, está formado de un sistema mecánico, actuadores, sensores y sistema de control como elemento básico. Los robots industriales pueden realizar labores verdaderamente complejas, su estructura general y la forma de operación son características principales por las cuales se diferencian del resto de las maquinas. Los robots se pueden clasificar en dos grupos los robots manipuladores y los robots móviles.
A continuación se muestran las partes fundamentales de los robots:
El manipulador
Se refiere a la parte mecánica del robot, consiste en una cadena formada por ejes consecutivos, unidos entre sí por medio de articulaciones que permiten el movimiento relativo entre ellos. Los distintos tipos de articulaciones se describen a continuación:
Articulación de rotación: Suministra un grado de libertad tipo 1, consiste en una rotación alrededor del eje de la articulación, esta articulación es la más empleada. En la Figura 1.1 se aprecia su dibujo.
Articulación prismática: Con grado de libertad de tipo 1 consiste en una traslación a lo largo del eje de la articulación. En la Figura 1.2 se aprecia su dibujo.
Fig. 1.2 Articulación prismática
Articulación cilíndrica: En este tipo de articulación existen dos grados de libertad uno de traslación y otro de rotación. En la Figura 1.3 se aprecia su dibujo.
Fig. 1.3 Articulación cilíndrica:
Articulación planar: Se caracteriza por el movimiento de desplazamiento en un plano existiendo dos grados de libertad. En la Figura 1.4 se aprecia su dibujo.
Instituto Politécnico Nacional
E S I M E
8 |
Página
Articulación esférica: Combina tres giros en tres direcciones perpendiculares en el espacio. En la Figura 1.5 se aprecia su dibujo.
Fig. 1.5 Articulación Esférica
Otra de las características existentes en la parte mecánica del robot son los dispositivos de agarre y sujeción (gripping mechanisms), también conocidos como manos y poseen la capacidad de sujetar, orientar y operar sobre las piezas manipuladas, existe la posibilidad que en lugar de un dispositivo de agarre contengan una herramienta.
La siguiente característica del manipulador es el sistema de motores, en esta propiedad se tienen motores eléctricos de paso a paso, dispositivos neumáticos e hidráulicos, motores eléctricos de corriente continua etc. Estos sistemas proporcionan una energía mecánica, que se transmite directamente o a través de elementos auxiliares.
Fig. 1.6 Configuración básica de robots manipuladores
Con esto se indican los puntos en los que puede situarse y cabe mencionar que no todos los puntos del espacio de trabajo tienen la misma accesibilidad. En la figura anterior, se aprecia la característica de la configuración cartesiana, que es la especificación de la posición de un punto por lo tanto con esta característica se simplifica la tarea del controlador del robot que debe generar las órdenes para ejecutar una trayectoria definida mediante una secuencia de puntos expresados en coordenadas cartesianas.
El control
Instituto Politécnico Nacional
E S I M E
10 |
Página
cuenta que las cargas inerciales, acoplamientos entre articulaciones, y efectos de gravedad son dependientes de la posición.
Asimismo el sistema de control se ocupa de la generación de trayectorias, entendiendo por tal la evolución del órgano terminal cuando se desplaza de una posición a otra, el generador de trayectorias debe suministrar a los servomecanismos las referencias apropiadas para conseguir la evolución deseada del órgano terminal a partir de la especificación del movimiento deseado en el espacio de una tarea.
Los lenguajes empleados a la robótica, son varios entre ellos se encuentran: WAVE, LAMA, VAL, AL, AUTOPASS etc. casi todos estos lenguajes están capacitados para trabajar con información procedente de sensores.
Sistemas sensitivos
Se puede clasificar a los sistemas sensitivos en dos grupos: los internos y los externos.
Sensores internos: Miden el estado de la estructura mecánica y en particular los giros o los desplazamientos relativos entre articulaciones, velocidades, fuerzas y pares.
Sensores externos: Permiten ofrecer al Robot una serie de sentidos, la información suministrada es utilizada por el sistema de percepción para aprender la realidad del entorno.
En resumen podemos decir que los sistemas sensitivos son aquellos dispositivos que permiten la interacción del Robot con su entorno. Los sensores empleados pueden ser: de fuerza, de visión y de sonido.
Tipos de Robots:
Robots manipuladores: Más que nada son brazos articulados. Formados por un conjunto de eslabones o elementos de cadena interrelacionados mediante articulaciones y cuentan con un
elemento al final de la articulación llamado “efector final” o herramienta.
Robots móviles: Surgieron de la necesidad de extender el campo de la aplicación de la robótica, y se refiere a todos aquellos robots que adquirieron movilidad ya sea con ruedas, cadenas, llantas, patas.
Robots autónomos y telerobótica: Los robots pueden clasificarse en teleoperados, de funcionamiento repetitivo y autónomo e inteligentes. Los teleoperados son aquellos manipulados por seres humanos en una estación remota, son modelos utilizados para situaciones complejas. Los repetitivos son aquellos que se usan en la industria, en la cadena de producción, son aquellos que le ahorran al hombre trabajos repetitivos, penosos e incluso peligrosos. Los robots autónomos e inteligentes, procesan más información, son máquinas capaces de percibir, modelar el entorno, planificar y actuar para alcanzar los objetivos sin la intervención humana. Estos robots autónomos por las cualidades que contienen, son usados para mandarlos al espacio.
Robots redundantes: Son aquellos utilizados para trabajar en lugares de difícil acceso, es por eso que se les añaden más grados de libertad.
Robot mano: Este tipo de robot ha tenido una gran importancia en la medicina ya que son usados para prótesis en los pacientes que han perdido sus manos, también se han desarrollado muchos órganos con diversas terminales que son muy evolucionados.
Robot piernas: Con este tipo de robot es posible conseguir la omnidireccionalidad y el desplazamiento, en la locomoción es mucho mejor. Estos robots permiten aislar el cuerpo del terreno empleado únicamente puntos discretos de soporte.
Robot flexible: Son aquellos robots que surgen de la necesidad cuando se requiere bajo peso y gran alcance. Normalmente se usan en los manipuladores espaciales, y en la construcción.
Robot submarino: Son aquellos robots que se utilizan en aplicaciones tales como la inspección, en el mantenimiento de instalaciones en entornos submarinos con difícil acceso, así como en recolección de datos.
Instituto Politécnico Nacional
E S I M E
12 |
Página
Micro-robótica: Son aquellos robots que se encargan de resolver tareas que no exigen una elevada potencia y complicados algoritmos, con rapidez y precisión. Una característica de este tipo de robot es su movilidad debido a su tamaño. La micro-robótica es una tecno-ciencia que se ocupa de los microbots, y esto es posible gracias a la aparición de los microcontroladores y sin duda alguna de la nanotecnología.
Androides: Son aquellos robots con forma humana, imitan el comportamiento de las personas, su uso es solo experimental y principalmente es usado en Japón. Uno de sus mayores problemas de este tipo de robots es su equilibrio a la hora de desplazarse, ya que es bípedo.
Zoomórficos: Este tipo de robots contiene un sistema de transporte que imita a los animales. La aplicación de estos robots sirve para el estudio de volcanes y la exploración espacial.
Estado actual de la Robótica
En la actualidad se ha observado que la robótica se fue desarrollando a pasos agigantados de tal manera que cumple con las demandas del mercado. De los países que más esfuerzo han invertido en la investigación sobre robots son EE.UU., Japón, Gran Bretaña, Alemania Occidental. El país que tiene más presencia robótica en el mundo es Japón, ya que es el país que tiene todo tipo de robots, por mencionar algunos son los de tipo industrial, entretenimiento, de educación, investigación, etc.
La robótica juega un papel importante sobre todo en el impacto tecnológico, hoy en día estamos dejando a un lado el esfuerzo, por la comodidad, en todos los sectores por ejemplo, en la Industria automovilística, la mitad de la actividad ya está robotizada, en el sector químico la automatización se hace en un 30%. En el mundo existe 1 millón de robots operando en todo el planeta, según los expertos estiman que para el año 2011 habrá 11.5 millones de dólares en ventas por robots.
Otra de las tendencias en donde los robots han marcado su territorio es en el sector salud, ya que tienen como finalidad proteger y salvar las vidas, hay robots que están diseñados para explorar el interior de nuestro cuerpo capaces de atacar núcleos de tumores, o realizar ciertas pruebas que de otro modo serían mucho más invasivas. Cuando existe una catástrofe en vez de mandar a personas arriesgar sus vidas para salvar otras, es mejor mandar a un robot, en Tokio existe un robot capaz de salvar heridos y rescatar victimas llamado RoboCue, así como este existe un gran número de robots que han sido construidos para este fin, dando unos excelentes resultados, ya que no solo rescatan, si no que existen otros preparados para llevar a los heridos a zonas seguras, alrededor del mundo se ha encontrado con diseños muy curiosos, como por ejemplo, con sensores que detectan las emisiones de CO2, es decir sirven para localizar la respiración de las personas, incluso hay tecnologías que fueron
C
APÍTULO II
“
Robot
CAPITULO
II “
ROBOT SCARA
”
Introducción
El Robot SCARA significa Selective Apliance Arm Robot for Assembly (Brazo robótico de configuración de montaje) por sus siglas en inglés, este tipo de robot puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales, además también puede hacer un movimiento lineal en su tercera articulación. Este robot está especialmente diseñado para realizar tareas de montaje en un plano.
Elementos que conforman el SCARA
El Robot SCARA se compone de elementos interrelacionados entre sí para obedecer la labor de movimiento. El robot está compuesto por actuadores, las respectivas transmisiones entre motor y articulación y el sistema neumático, están también los eslabones de articulación, la base, la pinza. A continuación se mencionan los componentes del brazo robótico:
Carcasa o chasis: Está formada principalmente de acrílico
Estructura: Es el conjunto formado por la mesa (en este caso el robot se colocara encima de una mesa), la base del robot, las articulaciones de rotación, el cilindro neumático y la muñeca de orientación para el efector final, esta ultima consta de una pinza accionada mediante componentes neumáticos.
Cableado, conectores, fines de carrera, y otros elementos, como topes mecánicos, compensadores.
Instituto Politécnico Nacional
E S I M E
16 |
Página
Articulaciones: Son comunes dos tipos de articulaciones la prismática y giratoria. Una junta prismática también conocida como junta deslizante, posibilita a un eslabón deslizarse en línea recta sobre otro. Una junta giratoria, si consideramos el caso de un grado de libertad, toma la forma de una bisagra entre un eslabón y el próximo dos o más articulaciones de estas puede combinarse estrechamente.
En este proyecto se ocupa principalmente la articulación prismática, ya que ofrecen un cálculo sencillo para su posicionamiento, alta precisión y gran robustez, y las rotaciones son más fáciles de construir y poseen envolventes de trabajo mayores con un menor espacio en planta. En cada movimiento independiente, que una articulación es capaz de realizar, a esto se le denomina Grado de Libertad (GDL).
Primera articulación: La primera articulación va apoyada de la segunda articulación con su respectivo actuador, el cual también es un motor de corriente continua, bajo esta articulación se aloja la primera etapa de la transmisión que acciona la pinza medio de una banda sincrónica desde el motor de paso.
Segunda articulación: Tiene las mismas características que la articulación uno, sobre esta articulación se desliza la tercera, la cual accionan por medio de un cilindro neumático.
Tercera articulación: Consta de un cilindro neumático de doble efecto, accionado por una válvula monoestable de cinco vías (o conductos que pueden interconectarse a través del distribuidor) y dos posiciones (o conexiones diferentes obtenidas de manera estable entre las vías del distribuidor).
Pinza: Es el conjunto que compone la transmisión de la polea (correa accionada por motor de paso), los movimientos de rotación de las dos primeras articulaciones, no alteran la orientación de la pinza, debido a que su accionamiento es indirecto. El accionamiento de la pinza se hace por medio de un cilindro neumático de doble efecto, tal y como es accionada la tercera articulación.
Configuraciones de los ejes principales
clásica, este brazo puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales, que son los dos ejes principales rotacionales paralelos y cuenta con un eje lineal también paralelo a ambos, de desplazamiento vertical.
Configuración de SCARA (RRP)
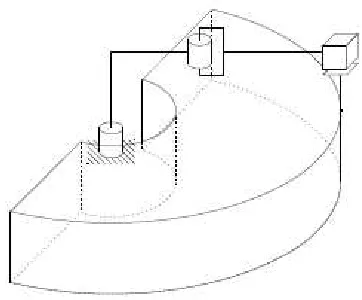
[image:32.612.192.429.419.588.2]El Robot SCARA (Brazo robótico de configuración de montaje) se muestra en la Figura 2.1 es una configuración popular, que, como su nombre lo indica, está diseñado para el montaje de las operaciones. Aunque el SCARA tiene una estructura de PVP, es muy diferente de la configuración esférica, tanto en apariencia como en su amplia gama de aplicaciones. A diferencia del diseño esférico, el cual para z0, z1, z2 es perpendicular entre sí, el SCARA para z0, z1, z2 es paralelo. Como podemos apreciar en la Figura 2.2 el Robot SCARA Epson E2L653S es un ejemplo de manipulador de este tipo. El espacio de trabajo del Robot SCARA se aprecia en la Figura 2.3.
Instituto Politécnico Nacional
E S I M E
[image:33.612.204.420.101.257.2]18 |
Página
Figura 2.2 La Epson E2L653S SCARA Robot.
Figura 2.3: Espacio de trabajo del manipulador SCARA.
Configuración cilíndrica (RPP)
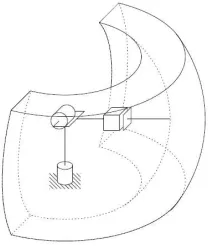
[image:33.612.232.413.381.531.2]prismáticas. Como su nombre indica, las variables comunes son las coordenadas cilíndricas del efector- final (sujetador o gripper) con respecto a la base. Un Robot cilíndrico, es el Robot RT3300 Seiko, se aprecia en la Figura 2.5, su espacio de trabajo se aprecia en la Figura 2.6.
Figura 2.4 La configuración del manipulador cilíndrico
[image:34.612.229.403.423.584.2]
Instituto Politécnico Nacional
E S I M E
[image:35.612.278.380.85.231.2]20 |
Página
Figura 2.6 Espacio de trabajo del manipulador cilíndrico.
Configuración cartesiana (PPP)
Es un manipulador donde las tres primeras articulaciones prismáticas, se conocen como un manipulador cartesiano, en la Figura 2.7 se puede apreciar. Para el manipulador cartesiano las variables más comunes son las coordenadas cartesianas del efector-final con respecto a la base.
Figura 2.7 La configuración del manipulador cartesiano.
Instituto Politécnico Nacional
E S I M E
[image:37.612.190.442.92.252.2]22 |
Página
Figura 2.9 Espacio de trabajo del manipulador cartesiano.
Manipulador paralelo
Figura 2.10 Espacio de trabajo del manipulador paralelo
Estructura mecánica
El objetivo de la configuración de la estructura mecánica de los robots industriales no busca una réplica humana sino funcional. El Robot SCARA como pertenece a los robots manipuladores esencialmente usa brazos articulados, en la Figura 2.11 se aprecia el dibujo del Robot SCARA
[image:38.612.242.393.451.617.2]Instituto Politécnico Nacional
E S I M E
24 |
Página
Este tipo de configuración produce robots muy rápidos y de alta precisión. Generalmente se encuentra aplicación en operaciones de ensamblado o empaquetado, que requieran movimientos simples para inserción o piezas
.
Actuadores y transmisiones
Dentro de los ejes del robot existen ciertas características que muchos de los robots poseen a continuación se describen algunas:
Actuadores o accionamiento: Dispositivos de motores que generan el movimiento de acuerdo con las órdenes del sistema de control. Suelen colocarse lo más cerca de la base del robot, puesto que los pares estáticos que deben vencer los actuadores dependen directamente de la distancia de las masas del actuador.
Sistema de transmisión y reducción: Elementos capaces de trasladar y modificar el movimiento generado por el accionamiento hasta la articulación. Tanto los sistemas de transmisión como los de reducción deben cumplir una serie de características muy restrictivas debido a las altas exigencias de funcionamiento que se le piden al robot.
Sensor de posición y velocidad: Dispositivos de captación de la información sobre la posición y velocidad de cada eje, cuya salida es recogida por el sistema de control para poder controlar el movimiento.
Las transmisiones son los elementos encargados de transmitir el movimiento desde los actuadores hasta las articulaciones. Además se incluirán los reductores, encargados de adaptar el par y la velocidad de la salida del actuador a los valores adecuados para el movimiento de los elementos del robot.
extremo del robot. De tal modo, las transmisiones pueden ser utilizadas para convertir movimiento circular en lineal o viceversa, lo que en ocasiones puede ser necesario. Un buen sistema de transmisión debe cumplir una serie de características básicas:
Debe tener un buen tamaño y peso reducido
No deben existir holguras considerables.
Se buscan transmisiones con gran rendimiento
Los actuadores tienen por misión generar el movimiento de los elementos del robot según las órdenes dadas por la unidad de control. Los actuadores utilizados en robótica pueden emplear energía neumática, hidráulica o eléctrica. Cada uno de estos sistemas presentan los accionamientos utilizados en la robótica son clasificados, en función de la energía que utilizan: neumáticos, hidráulicos y eléctricos. En el diseño de un robot, a la hora de seleccionar el tipo de actuador más conveniente, se consideran características, tales como la potencia, el control, la velocidad, la precisión, el coste y el peso.
Accionamiento neumático
El trabajo realizado por un actuador neumático puede ser lineal o rotativo, el movimiento lineal se obtiene por cilindros de embolo. Los cilindros neumáticos independientes de su forma constructiva representan los actuadores más comunes que se utilizan en los circuitos neumáticos, existen dos tipos fundamentales de los cuales derivan construcciones especiales
Cilindros de simple efecto: Con una entrada de aire para producir una carrera de trabajo en un sentido.
C
APÍTULO III
“
Comunicación
CAPITULO III
“
COMUNICACIÓN INALÁMBRICA
”
Red inalámbrica
La red inalámbrica permite la transmisión de datos de manera flexible sin la necesidad de emplear el cableado instalado. Una red inalámbrica envía todos los datos necesarios a través de ondas de radio cifradas, lo que elimina la posibilidad de interceptación e interferencias en la señal. Debido a esta tecnología se puede llegar hasta donde el cable no llega, o este es demasiado costoso o complicado de instalar. También proporciona una plataforma para la interconexión en red local de equipos en constante movimiento, portátiles o en instalaciones solamente temporales (para salas de exposiciones, congresos, naves, etc.).
La red inalámbrica local es un perfecto sustituto del cableado tradicional para montar una red local. En lugar de transmitir la información por medio de cable, se transmiten a través de ondas de radio cifradas, con lo que se elimina una costosa y problemática instalación.
En sólo unos minutos, la red local inalámbrica estará lista para funcionar, transmitiendo fiablemente la información gracias a las antenas emisoras / receptoras. Esto permite la perfecta movilidad de los equipos en red dentro del radio de cobertura de la red inalámbrica, radio que se extiende en las tres dimensiones y que es fácilmente ampliable con las antenas adecuadas. Esto hace de la red inalámbrica un soporte robusto, seguro y poco problemático para todo tipo de edificios.
Las ondas de la red inalámbrica no se bloquean ni se distorsionan por objetos sólidos, por lo que pasan fácilmente a través de puertas, tabiques, suelos y techos, y su señal cifrada y de frecuencia modificable por el usuario permite la total ausencia de interferencias. Esto hace que la red inalámbrica sea la solución perfecta para:
Ampliación de redes locales cableadas.
Cobertura en puntos de difícil conexión por cable.
Entornos de trabajo de configuración constantemente variable en tiempo casi nulo.
Acceso a la red local para ordenadores portátiles.
Instituto Politécnico Nacional
E S I M E
28 |
Página
Con esto se puede ahorrar espacio, por ejemplo, estableciendo áreas de conexión local temporal para personal que pasa mucho tiempo fuera de las instalaciones como los comerciales, sin necesidad de tener recursos desocupados en una instalación fija. Permite que los ordenadores portátiles de este personal estén dentro del grupo de trabajo local en el momento en que estos entren en el puesto de trabajo, con lo que se ahorra el costo de un ordenador fijo.
También permite un ahorro de costos en instalaciones fijas en entornos de difícil cableado como puede ser un edificio con características especiales, así como la fácil expansión o limitación, si fuera necesario, de la red actual con sólo añadir o retirar módulos.
En las últimas décadas, a nivel mundial, se han desarrollado los servicios inalámbricos lo cual ha provocado que hayan ganado muchos adeptos y popularidad en diversas áreas tales como hospitales, fabricas, bodegas, tiendas de autoservicio, tiendas departamentales, pequeños negocios y áreas académicas.
Las redes inalámbricas, permiten a los usuarios accesar información y recursos en tiempo real sin necesidad de estar físicamente en un sólo lugar. Con las redes inalámbricas se tiene la ventaja de que por sí misma es móvil y elimina la necesidad de usar cables y establece nuevas aplicaciones añadiendo flexibilidad a la red y lo más importante incrementa la productividad y eficiencia en las actividades diarias. Un usuario dentro de una red inalámbrica puede transmitir y recibir voz, datos y video, dentro de los edificios, entre edificios o campus universitarios e inclusive sobre áreas metropolitanas a velocidades de hasta 11 Mbps
La sociedad ha sido beneficiada con el uso de las redes inalámbricas debido a la movilidad que le permite estar comunicada en cualquier lugar desde cualquier punto, esto lo logra a través de los dispositivos que permiten la conectividad inalámbrica, este tipo de comunicación es la más usada actualmente.
WiFi
Una red WiFi es en realidad una red que cumple con el estándar 802.11. La especificación IEEE 802.11 es un estándar internacional que define las características de una red de área local inalámbrica. WiFi (que significa "Fidelidad inalámbrica”) es el nombre de la certificación otorgada por la WiFi Alliance, grupo que garantiza la compatibilidad entre dispositivos que utilizan el estándar 802.11.
Con WiFi se pueden crear redes de área local inalámbricas de alta velocidad siempre y cuando el equipo que se vaya a conectar no esté muy alejado del punto de acceso. En la práctica, WiFi admite ordenadores portátiles, equipos de escritorio, asistentes digitales personales (PDA) o cualquier otro tipo de dispositivo de alta velocidad con propiedades de conexión también de alta velocidad (11 Mbps o superior) dentro de un radio de varias docenas de metros en ambientes cerrados (de 20 a 50 metros en general) o dentro de un radio de cientos de metros al aire libre.
En la actualidad existen diferentes tipos de comunicación WiFi, que en si son los protocolos utilizados en las redes inalámbricas:
802.11 WiFi
802.15 ZigBee 802.16 WiMax
802.20 IEEE
802.22 IEEE
Protocolo 802.11
Instituto Politécnico Nacional
E S I M E
30 |
Página
Protocolo 802.15
El protocolo de aplicación es aquel que utiliza el 802.15 como transporte para cumplir su sometido. Es común pensar en reemplazar redes cableadas por redes inalámbricas, lo cual en si es perfectamente simple y factible. El protocolo que estas redes utilizan debe, de por si tener algún método de direccionamiento para diferenciar los remotos en el cable, lo cual resulta un overhead innecesario dado que 802.15.4 ya tiene el propio. Si se trata de un sistema multipunto, la operación se reduce a configurar los remotos para transmitir hacia el dispositivo central, pero a este deberá tener alguna forma de mapear las direcciones del protocolo de aplicación a las de 802.15, el protocolo 80.2.15 fue diseñado con un concepto diferente en el cual los nodos transmiten cuando lo necesitan, el diseño que se utiliza es Half Dúplex.
El protocolo 802.15 tiene como objetivo especificar los niveles físicos y de acceso al medio (MAC) de redes inalámbricas con dispositivos de muy bajo consumo y baja velocidad. La industria noto que hacía falta un nuevo estándar que concentre autonomía, por esta razón nació el estándar IEEE 802.15.4 (en la tabla 3.1 se observan las características de este Estándar) comercialmente llamado ZigBee. Se ha convenido llamar a esta clase de redes LR-WPAN (Low Rate Wireless Personal Area Network o baja tasa de red inalámbrica de área personal) dado sus bajas tasas de transmisión y su corto alcance.
Características
Rango
Bandas de frecuencia 868 MHz 915 MHz 2.4 GHz Alcance 10-20 mts Retardo Menor a 15ms
Número de canales 868/915 MHz:11 canales 2.4 GHZ: 16 canales Rango de transmisión de datos 868 MHz: 20kb/s
915 MHz: 40 kb/s 2.4 GHz: 250 kb/s
CSMA-ranurado
Temperatura Rango de temperaturas industrial -40°C a 85°C
Tabla 3.1 Características del Estándar 802.15.4
Protocolo 802.16
Es un estándar inalámbrico metropolitano ratificado por el IEEE (Instituto de Ingenieros Eléctricos y Electrónicos) denominado IEEE-802.16. Con exactitud, WiMAX es la denominación comercial que le da a dispositivos que cumplen con el estándar IEEE 802.16, para garantizar un alto nivel de interoperabilidad entre estos dispositivos.
El objetivo de WiMAX es proporcionar acceso a Internet de alta velocidad en un rango de cobertura de varios kilómetros de radio. En teoría, WiMAX proporciona velocidades de aproximadamente 70 Mbps en un rango de 50 kilómetros. El estándar WiMAX tiene la ventaja de permitir conexiones inalámbricas entre un transceptor de la estación base (BTS) y miles de abonados sin que éstos tengan que estar en línea de visibilidad (LOS) directa con esa estación. Esta tecnología se denomina NLOS que significa sin línea de visibilidad. En realidad, WiMAX sólo puede salvar obstáculos pequeños, como árboles o una casa y no puede atravesar montañas ni edificios altos. Cuando se presentan obstáculos, el rendimiento total real puede ser inferior a 20 Mbps.
Las revisiones del estándar IEEE 802.16 se dividen en dos categorías:
WiMAX fijo, también denominado IEEE 802.16-2004, determina las conexiones de línea fija a través de una antena en el techo, similar a una antena de televisión. WiMAX fijo, funciona en las bandas de frecuencia 2.5 GHz y 3.5 GHz, para las que se necesita una licencia, y en la banda 5.8 GHz para la que no se necesita tenerla.
Instituto Politécnico Nacional
E S I M E
32 |
Página
Protocolo 802.20 IEEE
Es el nombre por el que se conoce al estándar IEEE 802.20 Mobile FI (o también Mobile Broadband Wireless Access, Mobile BWA, o banda ancha móvil) cuyo objetivo es el desarrollo de un protocolo de acceso inalámbrico de conmutación de paquetes y optimizado para el soporte de servicios IP que posibilite el desarrollo de redes inalámbricas de acceso móvil asequibles, interoperables y con la
característica de “permanentemente conectado”.
Este sistema proporcionará anchos de banda simétricos entre 1 y 4 Mbps en bandas de frecuencia reguladas por debajo de los 3,5 GHz y a distancias de la estación base de unos 15 km. Cabe destacar que ha sido diseñado desde un principio para el uso intensivo de IP y en particular orientado a la VoIP y aplicaciones IP.
Protocolo 802.22 IEEE
IEEE 802.22 es un estándar para redes inalámbricas de área regional (WRAN) con espacios en blanco en el espectro de las frecuencias de televisión. El IEEE (Instituto de Ingenieros Eléctricos y Electrónicos) ha aprobado el estándar 802.22. El desarrollo del estándar IEEE 802.22 WRAN tiene como objetivo el uso de radio cognitiva (RC), técnicas que permiten el intercambio de espectro geográfico sobre una base no-interferencia, para ofrecer acceso de banda ancha de difícil acceso, zonas rurales.
El IEEE 802.22 WRAN se encargará de llevar internet de manera inalámbrica a zonas rurales con escaso o nulo acceso a la red. Dicho proyecto promete alcanzar unas velocidades de hasta 22 Mbps, aun cuando el dispositivo se encuentre a unos 100 kilómetros del transmisor más cercano.
Redundancia
frecuencia y velocidad de datos. Dado que estas unidades comparten el tiempo de la frecuencia, solo una unidad puede hablar a la vez. Si dicha unidad pasa la inactividad por alguna razón, los clientes remotos transferirán la comunicación a la otra unidad activa. Aunque esto si proporciona redundancia, no brinda más throughput que el que ofrecería un único Access point.
A la hora de implementar una solución inalámbrica, se debe tener presentes los aparatos que pueden causar interferencia como teléfonos inalámbricos. Las ventajas y las desventajas de los sistemas de inalámbricos, pueden ser varias, dentro de las ventajas podemos encontrar:
Portabilidad del servicio: Es decir que al utilizar una computadora portátil, se puede circular libremente dentro de la campana que forma el espectro de de cobertura, ya sea el generado por un Router o de un punto de acceso, sin perder comunicación. Además por medio de la tecnología sin cables, se puede conectar a otros equipos y a otros periféricos.
Escalabilidad: Es el cambio de topología de la red es sencillo, ya sea para pequeñas o grandes redes.
Flexibilidad: Permite ubicar los equipos donde el cable no puede llegar.
Reducción de costos: Los sistemas inalámbricos cuentan con la ventaja que no requieren de mantenimiento periódico y el gasto de la instalación es muy bajo, debido a que el personal puede ser reducido a solo un encargado para colocar el equipo requerido. Además de que no existe la necesidad de modificar el entorno a la hora de instalar el equipo.
Con respecto a las desventajas, se puede decir que no utiliza ningún medio físico para interconectar dos dispositivos o computadoras. Para evitar que otras personas accedan a estos equipos sin permiso, se crearon varios protocolos de encriptación, como WEP, WPA y WPA2. Otra desventaja es la pérdida de velocidad en comparación con una conexión cableada, debido a las interferencias y pérdidas de señal que el ambiente puede acarrear.
Instituto Politécnico Nacional
E S I M E
34 |
Página
Clasificación según el tipo de transferencia
Redes simplex (transmisión simple): Son aquellas redes en que los datos solo pueden viajar en un solo sentido
Redes Half Duplex: Son aquellas en que los datos pueden viajar en ambos sentidos.
Redes Full Dúplex: Son aquellas en que los datos pueden viajar en ambos sentidos a la vez.
Transmisión inalámbrica
Las ondas electromagnéticas se propagan en el espacio libre. Estas poseen una frecuencia dada en Hertz (Hz), esta cantidad corresponde a la cantidad de oscilaciones por segundo. La distancia existente entre dos puntos máximos o mínimos consecutivos de la onda se llama longitud de onda y
se designa con la letra griega λ.
[image:49.612.112.547.475.693.2]Al conectarse una antena apropiada a un circuito eléctrico, las ondas electromagnéticas se pueden difundir de manera eficiente y captarse por un receptor a cierta distancia. Toda comunicación inalámbrica se basa en este principio los rangos de frecuencias se muestran en la Figura 3.1.
Las ondas electromagnéticas también se pueden propagar en el vacío y todas viajan a la misma velocidad sin importar su frecuencia. Esta velocidad llamada velocidad de la luz c, y es aproximadamente 3x108 m/s. Los medios de transmisión inalámbrica pueden ser varios algunos por mencionar son los siguientes:
Microondas terrestres
La banda de frecuencia se encuentra entre los 2 hasta los 40 GHz A mayor frecuencia mayor ancho de banda, lo que permite mayor velocidad de transmisión. Para este tipo de medio se utiliza generalmente antenas parabólicas de aproximadamente 3 metros de diámetro. El transmisor debe estar perfectamente enfocado con el receptor garantizado la línea vista. La distancia máxima entre receptor y emisor es de aproximadamente de 7.14 Km.
Este tipo de transmisión permite la comunicación a larga distancia, la cual se presenta como otra alternativa de utilizar como medio el cable coaxial o la fibra óptica, con la ventaja de que no ocupa tanta cantidad de repetidores o amplificadores respecto al cable coaxial. Entre las aplicaciones principales se encuentran la transmisión de televisión y voz, y los enlaces punto a punto.
Microondas por satélite
Instituto Politécnico Nacional
E S I M E
36 |
Página
Espectro infrarrojo (IR)
Este tipo de medio es muy utilizado en comunicaciones de corto alcance. Las conexiones son punto a punto como para aplicaciones multipunto en áreas de cobertura limitada. Las ondas infrarrojas no traspasan objetos sólidos, no presentan problemas de interferencia o seguridad, tampoco tiene problemas de asignación de frecuencias debido a que las bandas utilizadas no ocupan permiso. Por el momento la máxima velocidad de transmisión por ondas infrarrojas es de 10 Mbps.
Transmisión por ondas de luz
La transmisión por ondas de luz se ha utilizado desde hace siglos. Actualmente se utiliza generalmente para conectar las redes de área local (LAN) entre dos edificios a través de láseres montados en la parte más alta de cada edificio, en cada edificio se tendrá un láser y un foto detector. Esta configuración presenta un ancho de bando alto y de bajo costo, es fácil de instalar y no requiere licencia. Como desventaja se encuentra que los rayos laser no pueden penetrar la lluvia ni la niebla densa. Tienen un buen funcionamiento en días soleados
Ondas de Radio
Las ondas de radio son fáciles de generar, pueden viajar distancias largas y penetrar edificios sin problemas, de modo que se utilizan mucho en la comunicación, tanto de interiores como de exteriores. Las ondas de radio también son omnidireccionales, o sea viajan en todas las direcciones desde la fuente, por lo cual el transmisor y el receptor no tienen necesidad de alinearse.
Ondas de baja frecuencia: A bajas frecuencias, las ondas de radio cruzan bien los obstáculos, pero la potencia se reduce drásticamente con la distancia a la fuente.
Ondas de alta frecuencia: A frecuencias altas, las ondas de radio tienden a viajar en línea recta y a rebotar con facilidad en los obstáculos, también son absorbidas por la lluvia. Todas las ondas de radio están sujetas a interferencia por los motores y equipos eléctricos. Debido a la capacidad de viajar distancias largas y la interferencia entre usuarios, los gobiernos legislan el uso de radiotransmisores.
Topologías de red
En las redes tradicionales, la capa de red es responsable de construir la topología de red y del manteamiento de la misma, así como de los servicios de enlace que incorpora las tareas necesarias de direccionamiento y seguridad. Estos mismos servicios existen para redes inalámbricas de bajo consumo, sin embargo tiene mayores retos debido a la preferencia de ahorro de energía.
El estándar que utiliza IEEE 802.15.4 dispone de dos tipos de dispositivos:
FFD (Full Funcion Device o función completa de dispositivos): Son dispositivos que tiene funcionalidad completa, pueden operar como coordinador de red de área personal (Coordinador PAN) o como dispositivo de red (end point).
RFD (Reduced Function Device o reducción de la función del dispositivo): Dispositivos con funcionalidad reducida. Solamente pueden recibir órdenes o informar a un coordinador de red más cercano. Es decir son los dispositivos de red (sensores o actuadores) usados en aplicaciones simples.
La disposición de los diferentes componentes de una red se conoce con el nombre de topología de red. Existen dos tipos de topologías en una red de comunicaciones:
Topología Física: Comprende la disposición real de los dispositivos de comunicación.
Instituto Politécnico Nacional
E S I M E
38 |
Página
Una red puede tener un tipo de topología física y un tipo completamente diferente de topología lógica. Una red de comunicaciones está compuesta de nodos, los cuales, además de su capacidad de procesamiento de datos, tienen como característica la transmisión y recepción de datos a través de los enlaces establecidos, ya sea por un medio cableado o inalámbrico. Los dos tipos más comunes de topologías lógicas son Broadcast y transmisión de tokens.
Topología Broadcast
En esta configuración cada nodo envía sus datos hacia todos los demás nodos sin considerar un orden específico. Los dispositivos no siguen ningún orden para utilizar la red, sino que cada uno accede a la red para transmitir datos en el momento en que lo necesite.
Topología Token
La transmisión de tokens controla el acceso a la red al transmitir un token eléctrico de forma secuencial a cada nodo. Cuando un nodo recibe un token, significa que puede enviar datos a través de la red. Si el nodo no tiene ningún dato para enviar, transmite el token hacia el siguiente nodo y el proceso se vuelve a repetir. Entre las topologías físicas más utilizadas se pueden mencionar las siguientes:
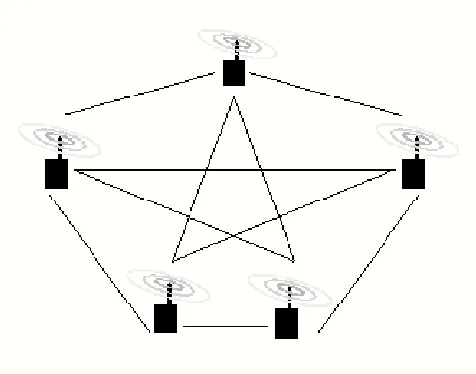
Topología en conexión total (malla completa)
aumentando la complejidad de la misma. Por lo tanto, en redes amplias, se presenta un problema de enrutamiento aun cuando se cuente con recursos de gran poder de procesamiento computacional.
Fig. 3.2 Topología en conexión total
El estándar IEEE 802.15.4 soporta tres tipos de topologías para su conexión en red las cuales son topología estrella, árbol y topología punto a punto.
Topología en malla
Instituto Politécnico Nacional
E S I M E
40 |
Página
nodos pueden ser escogidos como “líderes de grupo”, los cuales realizan funciones adicionales. Si un líder de grupo es deshabilitado, entonces otro nodo puede tomar sus funciones.
Todos sus nodos suelen ser FFD, ya que todos tienen la misma prioridad de acceso al medio, y aunque existe un coordinador PAN, este no tiene funciones relevantes. Difiere de la topología en estrella en que cualquier nodo se puede contactar con otro sin permiso del coordinador PAN.
Topología en árbol
[image:55.612.228.396.234.387.2]Esta topología es similar a la estrella extendida. Su diferencia radica en que no se utiliza un nodo concentrador, sino que utiliza un nodo troncal desde el que se ramifica a otros nodos. El flujo de información es jerárquico, como se muestra en la Fig. 3.4
Fig. 3.4 Topología en árbol
Topología en estrella
Instituto Politécnico Nacional
E S I M E
[image:57.612.226.404.97.266.2]42 |
Página
Fig. 3.5 Topología en estrella
Topología en estrella extendida
Fig. 3.6 Topología en estrella extendida
La principal consideración al implementar una red de comunicación es la calidad de servicio (QoS) que se quiere ofrecer. Entre los factores que afectan la calidad de procesamiento de datos en una red se pueden mencionar los siguientes:
Retrasos en la transmisión de datos.
Tasa de error por bit, pérdidas de paquetes de información.
Costo económico de la transmisión.
Consumo de potencia.
Dependiendo de la calidad de servicio, consideraciones económicas, el entorno donde se instale la red y la aplicación, se determina el tipo de topología a utilizar. Una red puede estar constituida de varias subredes interconectadas con diferentes tipos de topologías.