.
M
Mééxxiiccoo DD..FF.. JJuunniioo 22001100 E
ESSCCUUEELLAASSUUPPEERRIIOORRDEDEININGGEENNIIEERRÍÍAAMEMECCÁÁNNIICCAAYYEELLÉÉCCTTRRIICCAA S
SEECCCCIIÓÓNNDDEEESESTTUUDDIIOOSSDEDEPOPOSSGGRRAADDOOEEIINNVVEESSTTIIGGAACCIIÓÓNN
DISEÑO DE MECANISMOS UTILIZANDO ALGORITMOS
GENÉTICOS CON APLICACIÓN EN PRÓTESIS PARA
MIEMBRO INFERIOR
TESIS
QUE PARA OBTENER EL GRADO DE:
DOCTOR EN CIENCIAS
CON LA ESPECIALIDAD EN
INGENIERÍA MECÁNICA
P
PRREESSEENNTTAA::
M
M.. EENN CC.. EESSTTHHEERR LLUUGGOO GGOONNZZÁÁLLEEZZ
DDIIRREECCTTOORR:: DDRR.. EEMMMMAANNUUEELL AALLEEJJAANNDDRROO MMEERRCCHHÁÁNN CCRRUUZZ
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
Agradecimientos
Al:
Instituto Politécnico Nacional
Escuela Superior de Ingeniería Mecánica y EléctricaSección de Estudios de Posgrado e Investigación
Consejo Nacional de Ciencia y Tecnología
A mis asesores y amigos
Dr. Guillermo Urriolagoita Calderón Dr. Luis Hector Hernández Gómez
Dr. Emmanuel A. Merchán Cruz Dr. Guillermo Urriolagoita Sosa
Dr. Alexander Balankin Dr. Samuel Alcántara Montes.
De manera específica, a los apoyos derivados del Programa Institucional de
Formación de Investigadores (PIFI), como Becario del programa y tesista en los proyectos: SIP-20071298 “Análisis y síntesis de un mecanismo antropomórfico sub-actuado para el
desarrollo de una prótesis robótica, diseño y construcción del prototipo”
SIP-20082296 “Caracterización de la dinámica del cuerpo humano mediante un sistema basado en acelerómetros micro-electro-mecánicos (MEMS)”.
En particular, se agradece el apoyo otorgado por medio de los proyectos SEP/CONACyT:
2005/49701 “Robótica y Microtecnología aplicada en la Ingeniera Biomecánica para el Desarrollo de Prótesis y Equipo con Tecnología Nacional”
2007/1298 “Análisis y síntesis de un mecanismo antropomórfico subactuado para el desarrollo de prótesis robótica, diseño y construcción del prototipo”.
Apoyo para la formación de Doctores en Ciencias en su modalidad a Tesis Doctoral del CONACYT como becario doctoral con número de registro 204151 y
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
i ÍNDICE GENERAL
Índice de figuras iii
Índice de tablas vi
Simbología viii
Objetivo ix
Justificación ix
Resumen xi
Abstract xii
Introducción xiii
I. Estado del arte. 1
1.1 Generalidades 2
1.2 Métodos para la síntesis de mecanismos. 2
1.3 Técnicas de computación inteligente. 4
1.3.1 Algoritmos genéticos. 5
1.3.2 Lógica difusa. 7
1.3.3 Redes neuronales. 8
1.4 Optimización en la síntesis de mecanismos. 9
1.5 Mecanismos utilizados en prótesis para miembro inferior. 10
1.5.1 Prótesis inteligentes. 14
1.6 Planteamiento del problema. 19
1.7 Objetivos del proyecto y organización de la tesis 21
1.8 Sumario 23
II. Fundamentos teóricos. 25
2.1 Generalidades. 26
2.2 Análisis y Síntesis de mecanismo 26
2.3 Clasificación de mecanismos 28
2.3.1 Mecanismos Planos 28
2.3.1.1 Mecanismo plano de 4 barras. 29
2.3.1.1.1 Grados de libertad 29
2.3.1.1.2 Ley de Grashof. 30
2.3.1.1.3 Análisis de posición, velocidad y aceleración 31
2.3.1.1.4 Espaciamiento de Chebychev 32
2.3.1.1.5 Síntesis de mecanismos manivela oscilador 33
2.3.1.1.6 Método de Newton Raphson para la solución de funciones no lineales. 34
2.3.1.1.7 Síntesis analítica con algebra compleja. 37
2.3.1.1.8 Centro Instantáneo de Rotación en un mecanismo policéntrico. 41 2.3.1.2 Implementación de los métodos en la síntesis de un mecanismo de 4 eslabones.
42 2.3.1.3 Mecanismos de seis barras. 44
2.3.2 Mecanismos espaciales. 45
2.4 Descripción de Algoritmo Genético. 47
2.5 Descripción de un sistema lógico difuso. 56
2.6 Sumario 58
III. Simulación y síntesis de mecanismos. 60
3.1 Generalidades de la síntesis de mecanismos 61
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
ii 3.3 Análisis cinemático de un mecanismo plano para generación de trayectoria 72
3.3.1 Ejemplo de aplicación, mecanismo de 4 barras. 72
3.3.1.1 Trayectoria lineal 73
3.3.1.2 Trayectoria de la marcha. 78
3.3.2 Síntesis de mecanismos de seis barras. 82
3.3.2.1 Síntesis analítica para un mecanismo tipo Watt-1 82 3.3.2.2 Síntesis analítica para un mecanismo tipo Stephenson-III. 86 3.3.2.3 Ejemplos de aplicación, mecanismo tipo Watt-1. 88 3.3.2.4 Ejemplos de aplicación, mecanismo tipo Stephenson-III. 92
3.4 Sumario. 96
IV. Optimización de mecanismos. 98
4.1 Introducción a la optimización. 99
4.2 Optimización. 100
4.3 Ajuste en el rendimiento de los parámetros del AG. 101
4.4 Diseño óptimo en la síntesis de mecanismos. 104
4.4.1 Optimización del mecanismo de cuatro eslabones. 105 4.4.1.1 Trayectoria lineal con optimización de parámetros en el AG. 106 4.4.1.2 Trayectoria elíptica con optimización de parámetros en el AG, 18 puntos de precisión
110 4.4.2 Optimización de un mecanismo de seis eslabones. 113
4.4.2.1 Configuración tipo Watt-I 114
4.4.1 Mecanismo de 6 eslabones para cubrir 18 puntos de precisión 116
4.5 Sumario 120
V. Análisis de resultados. 122
5.1Prótesis policéntricas 123
5.2. Rangos de movimiento de la rodilla 123
5.3 Características de mecanismos aplicados a prótesis policéntrica. 125 5.3.1 Centro Instantáneo de Rotación (CIR) en una prótesis policéntrica 126
5.3.2 Línea de carga 126
5.4 Mecanismo policéntrico de 4 barras 128
5.4.1 Síntesis de mecanismos policéntricos para prótesis de 4 barras de control voluntario.
131
5.5 Mecanismo policéntrico de 6 barras 132
5.6 Sumario 135
Conclusiones. 137
Trabajos futuros. 141
Referencias. 142 Anexos. 154
Publicaciones derivadas de este trabajo. 165
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
iii ÍNDICE DE FIGURAS
Figura 1.1. Prótesis de eje simple. El TKO 1500 Ossur 11
Figura 1.2. Prótesis de rodilla con mecanismo de 4 barras 12
Figura 1.3. Mecanismo de 4 barras cruzado 12
Figura 1.4. Mecanismo de 4 barras con 2 barras intermedias y 3 topes 13
Figura 1.5. Mecanismo policéntricos de OTTO BOCK 3R60 13
Figura 1.6. Centro instantáneo de rotación (CIR) y centro mecánico de rotación (CMR) o el eje anterodistal de la rodilla, con una fuerza de reacción F aplicada al suelo
13
Figura 1.7. Configuraciones de los mecanismos de 6 barras para prótesis de rodilla 14
Figura 1.8. Prótesis magnetoreológica Rheo Knee 15
Figura 1.9. Prótesis inteligente Plus 15
Figura 1.10. OTTO BOCK 3R60 16
Figura 1.11. Prótesis policéntrica GEOFLEX 16
Figura 1.12. Total Knee® 2000 17
Figura 1.13. Prótesis Entegra SV Knee 17
Figura 1.14. Rodilla Hidráulica HOSMER 18
Figura 1.15. Rodilla de Nylon 802 19
Figura 1.16. Prótesis inteligente “da Vinci Award Nominee” 19
Figura 2.1. Partes de un mecanismo de 4 eslabones. 30
Figura 2.2. Tres inversiones del cuadrilátero de Grashof 31 Figura 2.3. Ejemplo de Espaciamiento de Chebychev de 5 puntos de precisión. 33
Figura 2.4. Síntesis de un eslabonamiento de 4 barras 34
Figura 2.5. Modelo general del Método de Newton Raphson. 34 Figura 2.6. Diagrama de flujo aplicando Newton Raphson en la Síntesis de
Mecanismos.
36
Figura 2.7. Mecanismo de cuatro barras. 37
Figura 2.8. Centros instantáneos de rotación en un mecanismo de 4 barras. 42 Figura 2.9. Mecanismo básico de 6 barras: Tipo Watt y Tipo Stephenson 44
Figura 2.10. Plataforma Stewart 46
Figura 2.11. Representación de un cromosoma binario 47
Figura 2.12. Diagrama de flujo de un algoritmo genético 48
Figura 2.13. Representación de la población. 49
Figura 2.14. Selección por ruleta. 52
Figura 2.15. Cruzamiento y Mutación. 54
Figura 3.1. Diagrama de flujo para la síntesis de mecanismos con algoritmos
genéticos. 64
Figura 3.2. Estructura del cromosoma 65
Figura 3.3. Longitud del cromosoma 65
Figura 3.4. Población de 1000 individuos generada aleatoriamente 66
Figura 3.5. Codificación y decodificación 67
Figura 3.6. Decodificación. 67
Figura 3.7. Elitismo y herencia forzada 69
Figura 3.8. Mecanismo de 4 eslabones siguiendo una trayectoria lineal. 73 Figura 3.9 Diagrama de flujo aplicando Newton Raphson en síntesis de mecanismo de 4 eslabones
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
iv lineal
Figura. 3.11. Mecanismo de 4 barras obtenido por números complejos. 76
Figura 3.12. Puntos de precisión en la marcha humana 78
Figura 3.13. Trayectoria de la rodilla durante la marcha 78 Figura 3.14. Estructura del cromosoma mecanismo de 4 eslabones 79 Figura 3.15. Procedimiento para la síntesis del mecanismo de 4 eslabones para la
trayectoria de la marcha humana
80 Figura 3.16. Seguimiento de trayectoria mecanismo cerrado con Algoritmos
Genéticos
81
Figura 3.17. Mecanismo de seis barras tipo Watt-I 84
Figura 3.18. Diagrama de flujo aplicando Newton Raphson en síntesis de mecanismo de 6eslabones tipo Watt-1
85 Figura 3.19. Mecanismo básico de 6 barras: Tipo Stephenson-III 86 Figura 3.20. Diagrama de flujo por el método de Newton Raphson para sintetizar un
mecanismo de 6 eslabones tipo Stephenson III
88 Figura 3.21. Diagrama de flujo de un algoritmo genético para un mecanismo de 6
barras tipo watt-I
90 Figura 3.22. Diagrama de flujo del procedimiento para resolver un mecanismo de 6
barras tipo watt-I
90 Figura 3.23. Mecanismo de 6 barras tipo Watt-I para seguimiento de trayectoria
especifica con Algoritmos Genéticos
91 Figura 3.24. Diagrama de flujo del algoritmo genético para un mecanismos de 6
barras tipo Stephenson III 93
Figura 3.25. Diagrama de flujo del procedimiento de análisis para un mecanismos de 6 barras tipo Stephenson III
93 Figura 3.26. Mecanismo de 6 barras tipo Stephenson-III para seguimiento de
trayectoria específica con Algoritmos Genéticos.
94
Figura 4.1. Modificación de parámetros en una trayectoria lineal 107 Figura 4.2. Evolución de un mecanismo de 4 eslabones. 109
Figura 4.3. Trayectoria elíptica 110
Figura 4.4. Modificación de parámetros en una trayectoria elíptica 112 Figura 4.5. Ajuste de parámetros para una trayectoria curva 115 Figura 4.6. Trayectoria de 20 puntos para un mecanismo de 6 eslabones tipo Watt-1 117 Figura 4.7. Ajuste de parámetros para una trayectoria específica 118 Figura 5.1. Movimientos de la rodilla, traslación y rotación 124
Figura 5.2 Movimientos de la rodilla 124
Figura 5.3 Centro Instantáneo de Rotación (CIR) para distintas configuraciones 126 Figura 5.4. Línea de carga y área para centros de la rodilla 127 Figura 5.5. Trayectoria del CIR de una rodilla policéntrica d e4 barras 129 Figura 5.6. Trayectoria del CIR de una prótesis de control voluntario para una rodilla de 4 barra
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
v Figura 5.13. Configuraciones de mecanismos de 6 barras tipo Watt para prótesis
policéntricas
133 Figura 5.14. Posición de los CIR de la rodilla de la prótesis policéntrica con
referencia a la línea de carga a través de la unión de la pantorrilla y el centro de contacto del pie con la tierra en las diferentes fases de la caminata
133
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
vi ÍNDICE DE TABLAS
Tabla 1.1. Síntesis de mecanismos más comunes 3
Tabla 2.1. Clasificación de Grashof para mecanismos de 4 barras 31
Tabla 2.2. Configuración de mecanismos 40
Tabla 3.1. Variables para mecanismo de 4 eslabones una posición 66 Tabla 3.2. Restricciones para mecanismo plano, seguimiento de trayectoria lineal 74 Tabla 3.3. Comparación de resultados por método numérico y aproximado 77 Tabla 3.4. Restricciones para mecanismo de 4 barras trayectoria de la marcha 79 Tabla 3.5. Resultados por distintos métodos de análisis mecanismo de 4 barras para
6 puntos de precisión
81 Tabla 3.6. Resultados del GA en la generación de trayectoria 82 Tabla 3.7. Restricciones para un mecanismo de 6 barras. 89 Tabla 3.8. Resultados por distintos métodos de análisis a un mecanismo tipo Watt-I
para 5 puntos de precisión. 91
Tabla 3.9. Resultados del GA en la generación de trayectoria para mecanismo de 6 barras
92 Tabla 3.10. Resultados por distintos métodos de análisis a un mecanismo tipo
Stephenson-III para 5 puntos de precisión 94
Tabla 3.11. Resultados del AG en la generación de trayectoria para un mecanismo tipo Stephenson-III.
95
Tabla 4.1. Parámetros básicos para desarrollar el algoritmo genético para un mecanismo de 4 eslabones.
106 Tabla 4.2. Parámetros de la Figura 4.1 trayectoria lineal 107 Tabla 4.3. optimización de parámetros par a un mecanismo de 4 barras trayectoria
lineal.
108 Tabla 4.1. Parámetros básicos para desarrollar el algoritmo genético para un
mecanismo de 4 eslabones. 106
Tabla 4.2. Parámetros de la Figura 4.1 trayectoria lineal 107 Tabla 4.3. optimización de parámetros par a un mecanismo de 4 barras trayectoria
lineal.
108 Tabla 4.4. Puntos de precisión de la trayectoria elíptica deseada 110 Tabla 4.5. Modificación de parámetros para una figura elíptica generada por un
mecanismo de 4 eslabones
112 Tabla 4.6. Parámetros que definen dimensiones y ángulos para una trayectoria
elíptica obtenida por varios autores.
113 Tabla4.7. Parámetros para síntesis de un mecanismo de 6 barras 114 Tabla 4.8. Ajuste de parámetros mecanismo de 6 barras trayectoria curva 115 Tabla 4.9. Comparación de longitudes y ángulos de un mecanismo de 4 eslabones
trayectoria de la marcha
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
vii eslabones
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
viii
SIMBOLOGÍA
AG Algoritmo genético m Grados de libertad n Número de eslabones
j1 Número de pares de un solo grado de libertad
j2 Número de pares con dos grados de libertad
s longitud del eslabón más corto l longitud del eslabón más corto p longitud del eslabón restante q longitud del eslabón restante
Posición angular de cualquier eslabón f Cualquier relación funcional deseada xj Puntos de precisión
r Eslabones
longcr Longitud del cromosoma nbits Número de bits
pi Población inicial
w Grado de adaptación para la probabilidad de cruce Pc Probabilidad de cruce
Pm Probabilidad de mutación
i d
C Conjunto de puntos específicos indicados por el diseñador Ci Es una serie de posiciones de los acoplamientos
Puntos generados por el acoplador del mecanismo x0 Puntos de origen en el eje x
y0 Puntos de origen en el eje y xd Puntos deseados en el eje x yd Puntos deseados en el eje y
θ2 Ángulo de transmisión
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
ix
OBJETIVO.
El objetivo general de esta tesis, es desarrollar herramientas de computación evolutiva para la síntesis de mecanismos policéntricos con aplicación en la biomecánica.
Derivados del objetivo general se plantean los siguientes objeticos específicos:
• Plantear una función objetivo que resuelva un problema de síntesis de optimización de mecanismos necesarios para evaluar varias cantidades de puntos y trayectorias.
• Probar la viabilidad práctica de la estrategia planteada mediante la implementación de los algoritmos genéticos capaz de resolver casos prácticos de síntesis.
• Diseñar un mecanismo que cubra las especificaciones impuestas para generar el movimiento de una rodilla humana.
JUSTIFICACIÓN.
La síntesis de mecanismos es la base para la construcción de cualquier máquina. Sus aplicaciones son numerosas y cada una de ellas responde a ciertos requisitos concretos y específicos que hacen que no sea posible crear pautas de diseño generales en las posibles soluciones para un mismo problema de síntesis de mecanismos, ya que existen diversas tipologías que pueden cambiar según el caso. Esta falta de homogeneidad ha servido para la creación de varios métodos para resolver problemas de síntesis, entre los que se encuentran los métodos de optimización.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
x De aquí el surgimiento de los métodos de síntesis aproximados que tiene dos objetivos principales, dar al planteamiento una orientación hacia la resolución mediante herramientas de programación y plantear estrategias de búsqueda del óptimo global dentro del espacio de diseño, también busca una solución que usualmente no es única y el número de requerimientos de diseño no es una limitación.
Por otro lado, durante años se han diseñado diversas configuraciones de mecanismos como los de eje simple y eje policéntrico para las prótesis para miembro inferior, pero han sido en su mayoría para gente con características antropomórficas distintas a las de este país, lo que motiva a diseñar una prótesis que asemeje los movimientos lo más posible al cuerpo humano y cubra las necesidades de la población mexicana.
Por dicha problemática, se plantea el desarrollo de una herramienta de optimización basados en computación inteligente y en la síntesis aproximada para realizar síntesis de mecanismos, que consuman poco tiempo y empleen algún método numérico para la evaluación de la función objetivo. En este trabajo se busca una solución adecuada para tener una eficiencia cinemática en un mecanismo generador de trayectorias cumpliendo con las restricciones impuestas y variables como la longitud de los eslabones, el ángulo de transmisión y los ángulos que dan la movilidad al mecanismo para prótesis de miembro inferior, ya que pequeñas diferencias en las longitudes de los eslabones y en la posición de las articulaciones que los unen puede generar grandes cambios en el comportamiento cinemático de los mecanismos.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
xi RESUMEN
Esta tesis presenta como herramienta principal, para el análisis y la síntesis de mecanismos planos, la técnica de los algoritmos genéticos, que por sus características, han sido utilizados como métodos de búsqueda y optimización, en el que basta con encontrar la representación adecuada para las soluciones y la función principal a optimizar. El objetivo de la investigación es encontrar las longitudes de los eslabones y la medida de los ángulos para un mecanismo óptimo con el que se reproduzca el proceso de marcha humana como caso de aplicación, pero que también se pueda generar cualquier trayectoria específica, indicando solo las restricciones más significativas.
|
La metodología empleada comprende etapas como la cinemática, el análisis y la síntesis para diversas configuraciones de mecanismos, mostrando los fundamentos teóricos, el desarrollo de los algoritmos genéticos, la aplicación de estos en la síntesis y la simulación en algunos programas especializados para desarrollar dicho fin.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
xii ABSTRACT
This thesis presents such as main tool, for the analysis and the synthesis of planar mechanisms, the genetic algorithms technique, that by their characteristics, have been used like methods search and optimization, in which it is enough with finding the adapted representation for the solutions and the fitness function to optimize. The objective of the investigation is to find the lengths of the links and the measurement of the angles for an optimal mechanism with which the process of human march reproduces as case of application, but that also any trajectory can be generated specific, indicating single the most significant restrictions.
The used methodology includes stages like the kinematics, the analysis and the synthesis for diverse configurations of mechanisms, showing the theoretical foundations, the development of the genetic algorithms, the application of these in the synthesis and the simulation in some specialized programs to develop this aim.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
xiii
INTRODUCCIÓN
Se han aplicado varios métodos de optimización a la síntesis de mecanismos planares para la generación de trayectorias. Algunas de las técnicas usadas fueron difíciles y computacionalmente costosas de aplicar, pero pese a esta problemática, se ha demostrado con un gran número de trabajos, que es posible sintetizar un mecanismo policéntrico de varios eslabones, con acoplamiento cinemático, capaz de emular el movimiento de la rodilla, teniendo como inconveniente no cubrir completamente las necesidades del usuario.
Este trabajo se enfoca al diseño de algoritmos computacionales, empleando herramientas evolutivas, para resolver y optimizar la síntesis de mecanismos de cadena cinemática cerrada. Estas son una combinación de técnicas y estrategias de programación capaz de ser integrados para obtener la generación de trayectorias de acuerdo a ciertas restricciones que cubrirán tareas específicas según la rama de la ingeniería en la que sean empleados. Para esta tesis, la aplicación es enfocada a la robótica, utilizando el análisis cinemático, dinámico y estructural de mecanismos para generar el movimiento en una prótesis inteligente que reemplazará el miembro inferior perdido.
Se presenta la metodología empleada para la obtención de mecanismos generadores de trayectorias con base en sus parámetros y restricciones, la aplicación de métodos numéricos para la síntesis del mecanismo y la utilización de técnicas como la lógica difusa y las redes neuronales, en combinación con los algoritmos genéticos, para diseñar nuevas técnicas de programación y optimización, en donde se establecerá la minimización de una función objetivo formulada como una expresión de la diferencia entre la trayectoria generada y la deseada.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
xiv Los mecanismos sintetizados serán aplicados al diseño de una prótesis policéntrica, ya que con base en la revisión del estado del arte, se ha identificado la existencia de problemas que no permiten que se tenga un movimiento natural en la fase de marcha, esto debido a que solo se estudia el movimiento en el plano sagital, que presenta un rango de movimiento mucho mayor que en el resto de los planos, sin considerar que la rodilla tiene 6 grados de libertad que incluyen movimientos de rotación y traslación. Otro punto importante a resolver es la localización del centro instantáneo de rotación en extensión completa y en flexión.
Con base en los objetivos obtenidos por la revisión y análisis del estado del arte, este trabajo se ha organizado de la siguiente manera:
En el Capítulo 1, Estado del Arte, se presentan los métodos para la síntesis de mecanismos más utilizados durante los últimos años, las principales técnicas de computación inteligente, entre las que destacan los algoritmos genéticos, la lógica difusa y las redes neuronales. También se presenta la optimización en la síntesis de mecanismos utilizando estas técnicas para ser aplicados en las prótesis robóticas inteligentes para miembro inferior, caso de aplicación de este trabajo. Se describe el planteamiento del problema y los objetivos propuestos para resolver la problemática existente en fase de marcha utilizando una prótesis.
En el Capitulo 2, Fundamentos Teóricos, se da una introducción a los aspectos teórico-prácticos, se presentan los fundamentos teóricos para el análisis y la síntesis de mecanismos indicando métodos numéricos y de optimización, para el caso de estudio se presenta el rango de movimiento de la rodilla como base para la simulación.
En el Capitulo 3, Simulación y síntesis de mecanismos, se presenta la síntesis y el análisis de mecanismos planares para generar trayectorias predefinidas de mecanismos de 4 y 6 barras. Para la síntesis de mecanismos se emplean los algoritmos genéticos como métodos de optimización y búsqueda para las dimensiones de los eslabones y los ángulos de movimiento.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
xv En el Capítulo 5, Análisis y discusión de resultados, se presentan los resultados obtenidos al aplicar algoritmos genéticos a diversas configuraciones de mecanismos aplicados a una prótesis para miembro inferior.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
1
ESTADO DEL ARTE
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
2 1.1 Generalidades.
La síntesis de mecanismos se refiere a la proyección y diseño de estos de acuerdo a propiedades tales como la estructura cinemática y dinámica para desarrollar una serie de movimientos predefinidos. Para cubrir las restricciones y necesidades impuestas por el diseñador, se han desarrollado métodos numéricos y gráficos que han resuelto hasta cierto punto la problemática de precisión y posición, pero tienen como inconveniente restringir el número de puntos de posición para permitir la solución por el sistema matemático, como consecuencia de esto, se han diseñado métodos para resolver la síntesis de múltiples puntos de precisión y posición, incluyendo propiedades como las longitudes de los eslabones y los ángulos de transmisión de movimientos. El avance de estos métodos parte de los gráficos y numéricos, hasta llegar a los de optimización, como los métodos heurísticos y las técnicas de computación inteligente o flexible, entre las que se encuentran los algoritmos genéticos, la lógica difusa y las redes neuronales y que han mejorado la precisión de los resultados, la respuesta de convergencia y el error que se genera en la función objetivo al obtener la distancia entre la trayectoria generada y la deseada.
1.2 Métodos para la síntesis de mecanismos.
La síntesis de mecanismos de acuerdo a Ruleaux en 1875 (Gómez-Cristóbal, 2003) es el proceso de transformación de las exigencias en algunos mecanismos. Ésta abarca problemas no estructurados de gran complejidad matemática, donde es preciso alcanzar un cierto grado de equilibrio entre los distintos objetivos, que son por lo general de naturaleza diversa, llegando a una solución que satisfaga suficientemente las exigencias de diseño impuestas.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
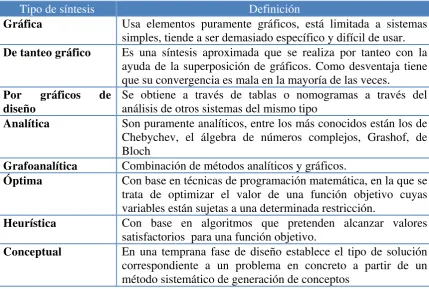
[image:22.595.82.512.279.568.2]3 restricción, se han diseñado métodos para resolver la síntesis de múltiples puntos de precisión y posición (Tabla 1.1), con técnicas como la optimización no lineal, la optimización de la síntesis con diversos métodos (Sancibrian et al., 2004) y los algoritmos genéticos (Roston & Sturges, 1996, Michalewicz, 1999, Cabrera et al., 2002, Laribi et al., 2004, Quintero-R et al., 2004), redes neuronales(Walczak, 2006, Vasiliu & Yannou, 2001, Starosta, 2006), métodos de Monte Carlo (Kalnas & Kota, 2001) o método de desviación de control (R.-Bulatovic & S. R. Djordjevic, 2004). La mayor parte de estos trabajos relacionados con la generación de trayectorias y de posición para mecanismos de 4 eslabones.
Tabla 1.1. Síntesis de mecanismos más comunes. (Gómez-Cristóbal, 2003).
Tipo de síntesis Definición
Gráfica Usa elementos puramente gráficos, está limitada a sistemas simples, tiende a ser demasiado específico y difícil de usar. De tanteo gráfico Es una síntesis aproximada que se realiza por tanteo con la
ayuda de la superposición de gráficos. Como desventaja tiene que su convergencia es mala en la mayoría de las veces.
Por gráficos de diseño
Se obtiene a través de tablas o nomogramas a través del análisis de otros sistemas del mismo tipo
Analítica Son puramente analíticos, entre los más conocidos están los de Chebychev, el álgebra de números complejos, Grashof, de Bloch
Grafoanalítica Combinación de métodos analíticos y gráficos.
Óptima Con base en técnicas de programación matemática, en la que se trata de optimizar el valor de una función objetivo cuyas variables están sujetas a una determinada restricción.
Heurística Con base en algoritmos que pretenden alcanzar valores satisfactorios para una función objetivo.
Conceptual En una temprana fase de diseño establece el tipo de solución correspondiente a un problema en concreto a partir de un método sistemático de generación de conceptos
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
4 triada de 5 puntos para la generación de funciones de mecanismos de 6 barras (Subbian & Flugrad Jr, 1993).
1.3 Técnicas de Computación Inteligente.
La computación inteligente tiene su origen en la teoría de la inteligencia artificial, esta engloba un conjunto de técnicas que tienen en común la robustez en el manejo de información imprecisa e incierta. En algunos casos estas técnicas pueden ser combinadas para aprovechar sus ventajas individuales, entre estas se encuentran la lógica difusa, las redes neuronales y los algoritmos genéticos.
En la década de los noventa aparecieron varios métodos de búsqueda como los Algoritmos de Metrópoli, Templado Simulado (Simulated Annealing SA), Búsqueda Tabú (TS), Colonia de Hormigas (ACO) y GRASP, Algoritmos Genéticos (AG), que se describen en base al trabajo de (Hincapié-Isaza et al., 2004) como sigue:
• Algoritmo de Metrópolis.- Genera una secuencia de estados de un sólido, o sea, dado un sólido en un estado i con energía Ei, se genera el estado siguiente j mediante la aplicación de un mecanismo que transforma al estado siguiente a través de un pequeño disturbio. La energía del próximo estado es Ej; si la diferencia de energía (Ej - Ei) es menor o igual a cero, el estado j es aceptado. Si ocurre lo contrario, el estado j se acepta con cierta probabilidad.
• Templado simulado.- La metodología de Templado simulado ( Simulated Annealing SA ), fue definida al inicio de los años 80, como una nueva herramienta para ser empleada en la solución de problemas combinatoriales de gran complejidad. Surgió del campo de la termodinámica como consecuencia de la comparación de los problemas formulados en este campo con los de la investigación de operaciones. Es una metodología simple y de gran potencialidad para ser aplicada a una gran variedad de problemas.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
5 casi ciegos como las hormigas pueden establecer las rutas más cortas entre el nido y una fuente de comida y viceversa.
• Búsqueda TABÚ (TS).- Es un procedimiento metaheurístico utilizado para manejar un algoritmo heurístico de búsqueda local y así evitar que el proceso se detenga en un óptimo local. Por lo tanto, TS realiza una exploración a través del espacio de configuraciones delimitando adecuadamente los óptimos locales. Para evitar que el proceso regrese a los óptimos locales y entre en un ciclo repetitivo, la búsqueda tabú clasifica los movimientos más recientes como “movimientos tabú”; estos prohíben que una configuración sea visitada nuevamente.
• GRASP.- Es una evolución de los algoritmos heurísticos constructivos, especialmente de aquellos que usan indicadores de sensibilidad. Con estos indicadores se calcula la variación de la función objetivo con respecto a las variables de interés del problema de optimización, y se usan para identificar los tributos atractivos de tal problema. Emplea una propuesta intermedia entre Simulated Annealing y Búsqueda Tabú para realizar la fase de exploración y ha mostrado ser eficiente en la solución de problemas complejos de optimización.
• Algoritmos Genéticos.- Son herramientas matemáticas que imitan a la naturaleza e intentan resolver problemas complejos empleando el concepto de la evolución. El algoritmo ejecuta una búsqueda simultánea en diferentes regiones del espacio factible, realiza una intensificación sobre algunas de ellas y explora otros subespacios a través de un intercambio de información entre configuraciones.
1.3.1 Algoritmos genéticos.
El término de algoritmo genético (AG) fue introducido por John Holland y sus estudiantes (Holland, 1975), e implementado por (Goldberg, 1989), quién menciona que los AG son diferentes métodos tradicionales de optimización por 6 cosas:
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
6 2. Trabajan con una población de puntos, no un simple punto.
3. Utilizan una función objetivo.
4. Usan reglas de transición probabilística, no deterministicos.
5. No necesitan conocimientos específicos sobre el problema a resolver.
6. Cuando se usan para problemas de optimización resultan menos afectados por los máximos locales
Los AG usan una población en la que los miembros son creados aleatoriamente, el individuo de la población tiene que desarrollarse buscando ser de los mejores individuos, y esto se hace a través de una selección natural, reproducción, mutación y otros operadores genéticos (Goldberg, 1989):
• Reproducción: Un individuo es copiado de acuerdo al valor de la función objetivo, de tal forma que los individuos de mejor comportamiento o funcionamiento tienen mayor probabilidad de pertenecer a la siguiente generación.
• Cruzamiento: Algunos genes de un individuo de la nueva población son intercambiados con el gen de otro, generalmente con el más fuerte. La reciprocidad es aleatoria y el porcentaje de los genes intercambiados puede ser un proceso aleatorio o fijo.
• Mutación: Es la variación del valor de los genes de forma aleatoria. Generalmente se define una operación entre [-valor, valor] para cada gen con una distribución normal y de media igual a cero.
Este tipo de algoritmos genéticos simples se caracteriza por tener un tamaño de población fijo en todas las generaciones, una selección proporcional, mutación uniforme y selección no elitista.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
7 optimización funcional, es la función objetivo del problema en cuestión; es decir, la función a optimizar (Iglesias-Otero, 2005).
El algoritmo finaliza cuando se ha ejecutado un número determinado de iteraciones prefijado de antemano, cuando se ha encontrado el valor óptimo o bien cuando se ha obtenido en la población un nivel de aptitud medio superior a un cierto nivel de control (Buckles et al., 1992).
Existen una serie de puntos comunes a todos los algoritmos genéticos que los caracterizan (Iglesias-Otero, 2005):
• La existencia de una representación genética de las posibles soluciones del problema.
• La creación de una población inicial de posibles soluciones.
• El uso de una función evaluadora que es la encargada de medir la “bondad” de las soluciones en términos de su adaptación al medio y permite seleccionar a los mejores individuos.
• El empleo de operadores genéticos, que alteran la composición de los descendientes durante la reproducción, mediante cruces, mutaciones o inversiones.
• La existencia de diversos parámetros como son el tamaño de la población o la probabilidad de aplicar los operadores genéticos.
1.3.2 Lógica difusa.
Fue Propuesto por Zadeh (1965) y utilizado por primera vez por Mamdani (1974), la lógica difusa es una extensión de la lógica booleana que permite el proceso "de la información vaga" o incierta (Merchán-Cruz, 2005). Los sistemas lógicos difusos son sistemas basados en reglas que son expresadas como implicaciones lógicas, estas reflejan la relación que guarda un hecho derivado de otro. Una lógica consta de lo siguiente(Russell & Norving, 1996):
• Un sistema para describir lo que está sucediendo en un momento determinado y que consta de:
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
8 • La semántica del lenguaje a través de la cual cada oración expresa algo relacionado
con el mundo
• Una teoría de demostración que agrupe un conjunto de reglas para deducir las implicaciones de un conjunto de oraciones y que especifique los pasos de razonamiento.
Los sistemas lógicos difusos están en capacidad de simultáneamente manejar información numérica y conocimiento lingüístico para efectuar una transformación no lineal del vector de entrada (características) a una salida escalar (consecuencias). Las especificaciones de la transformación no lineal las establece la teoría de subconjuntos difusos y la lógica difusas(Mendel, 1995).
1.3.3 Redes neuronales.
Las redes neuronales artificiales (RNA) son la implementación en hardware y/o software de modelos matemáticos idealizados de las neuronas biológicas, estas son interconectadas unas a otras y son distribuidas en capas de tal forma que emulan en forma simple la estructura neuronal del cerebro. Cada modelo de neuronas es capaz de realizar algún tipo de procesamiento a partir de estímulos de entrada y ofrecer una respuesta por lo que las RNA en conjunto funcionan como redes de computación paralelas y distribuidas similares a los sistemas cerebrales biológicos (Del Río & Molina, 2002).
En términos generales una red neuronal es un procesador masivo, distribuido paralelamente, constituido de unidades de procesamiento, las cuales tiene la capacidad para almacenar conocimiento experimental y tenerlo disponible para su uso. Esta emula al cerebro en los siguientes aspectos:
• El conocimiento es adquirido por la red desde su entorno a través de un proceso de aprendizaje.
• Los pesos de las conexiones entre las neuronas, llamados pesos sinápticos, son usados y modificados para almacenar conocimiento.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
9 en la habilidad de aprender y generalizar. Esto se refiere a que la red neuronal es capaz de generalizar reglas aprendidas de los casos en los que ha sido entrenada y posteriormente aplicarlas a casos no aprendidos. Estas habilidades permiten a las redes neuronales artificiales resolver problemas complejos de gran escala que actualmente son inatacables (Bautista-Camino, 2008).
Las aplicaciones más exitosas en la actualidad de las RNA son: • Procesamiento de imágenes y voz.
• Reconocimiento de patrones. • Planeación y estrategia. • Predicción.
• Control y optimización. • Procesamiento de señales.
Para la síntesis de mecanismos las redes neuronales se emplean como herramienta de control que consisten en un conjunto estados de condición lingüística que se deriva de operadores humanos y los cuales representan un conocimiento experto sobre el sistema a ser controlado u optimizado.
1.4 Optimización en la síntesis de mecanismos
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
10 la metodología de síntesis de tipo y dimensional de mecanismos partiendo de partes descritas por el usuario.
(Quintero-R et al., 2004) presentó un procedimiento para realizar la síntesis de un mecanismo que siguiera una trayectoria predeterminada para múltiples puntos de precisión, encontrando la aplicación para mecanismos de 4 y 6 barras. Por otro lado (Laribi et al., 2004) diseñó una combinación de un algoritmo genético con un controlador de lógica difusa. Este controlador tenía como principal función el monitorear la variación de las variables de diseño durante el primer corrimiento de los AG y modificar el límite inicial de los intervalos al iniciar el segundo corrimiento. Una aproximación usando redes neuronales para la síntesis de mecanismos es la desarrollada por (Vasiliu & Yannou, 2001, Walczak, 2006, Starosta, 2006), quienes utilizaron 9 variables para la síntesis de un mecanismos de 4 barras y entrenaron a la red neuronal por medio de 3 etapas, en donde la primera consiste en la generación de un número enorme de valores aleatorios propuestos para la simulaciones cinemáticas y obtener valores al azar de las dimensiones y generar un proceso de aprendizaje de la red. En la segunda etapa, la red obtuvo una solución aproximada del problema de la síntesis, que es una interpolación de casos cercanos. Obteniendo con esto una buena calidad de las soluciones sintetizadas, para un tamaño minúsculo de la red cuyas soluciones se pueden utilizar como resultados iniciales para una optimización dimensional convencional.
1.5 Mecanismos utilizados en prótesis para miembro inferior.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
11 de estas. Para resolver los problemas mencionados anteriormente se desarrollaron las rodillas policéntricas.
[image:30.595.273.376.111.230.2]}
Fig.1.1. Prótesis de eje simple. El TKO 1500 Ossur (Dupes, 2004).
Las rodillas policéntricas poseen un centro de rotación que varía con el ángulo de flexión de la rodilla (Oberg & Kamwendo, 1988). Pueden ser mecanismos de cuatro o seis barras principalmente (Fig. 1.2). Son muy estables durante la fase de apoyo, al momento de flexionar o al sentarse. Son ideales para los amputados que no pueden andar de forma segura con otro tipo de rodillas, para los que tienen una desarticulación de la rodilla, amputación bilateral o para los que tienen muñones largos. Como limitaciones tiene que la amplitud de rodilla puede quedar limitada a un cierto grado.
El tipo de prótesis que emplea estos mecanismos cuenta con dos ventajas: mayor estabilidad en la fase de postura (Radcliffe, 1970, Radcliffe, 1977, Radcliffe, 1994) y flexión de rodilla(Greene, 1983, Oberg & Kamwendo, 1988, Blumentritt & Werner-Scherer, 1997). Sin embargo, como desventaja tiene que el rango de movimiento sobre la rodilla puede ser restringido a algunos grados, también el incremento en el peso debido al mayor número de piezas y el mantenimiento de la misma, que es mayor si se compara con un mecanismo de una barra.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
12 Fig.1.2. Prótesis de rodilla con mecanismo de 4 barras (Gard et al., 1996).
Fig.1.3 Mecanismo de 4 barras cruzado(Rovetta et al., 2001).
Los proyectos de (Kazutoshi et al., 2004) presentan un mecanismo de 4 barras, con un par de éstas intermedias, e incluye microprocesadores, sensores, cilindros neumáticos e hidráulicos, como principales componentes para el control de la prótesis, que ayudan a examinar los parámetros biomecánicos de su prototipo, tales como la duración de la postura, el ángulo máximo de la flexión de la rodilla en postura y la oscilación, el ángulo máximo de la flexión de la cadera y de los momentos máximos de la extensión de la cadera, que permiten mantener a la rodilla en una posición cerrada y prevén que la rodilla se colapse (Fig. 1.4).
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
13 Fig.1.4 Mecanismo de 4 barras con 2 barras intermedias y 3 topes (Kazutoshi et al., 2004).
Fig.1.5. Mecanismo policéntricos de OTTO BOCK 3R60 (Blumentritt & Werner-Scherer, 1997).
Fig.1.6. Centro instantáneo de rotación (CIR) y centro mecánico de rotación (CMR) o el eje anterodistal de la rodilla, con una fuerza de reacción F aplicada al suelo (Blumentritt & Werner-Scherer, 1997).
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
14 Fig.1.7. Configuraciones de los mecanismos de 6 barras para prótesis de rodilla. (Dewen et al., 2003).
1.5.1 Prótesis inteligentes.
Actualmente en el mercado existen varios diseños de prótesis inteligentes, siendo de las más representativas en cuanto al diseño y fabricación de estas, de las empresas Endolite's®, Intelligent Plus®, Otto Bock's C-Leg®, Ossur® y Seattle's Power Knee ® entre otras.
Ossur® (Ossur, 1991) diseñó una de las prótesis comerciales de tipo magnetoreológicas en 1991, la Rheo Knee (Fig.1.8). Ésta se creó en colaboración con el laboratorio del Instituto de Tecnología de Massachussets (MIT). Utilizaba actuadores magnetoreológicos (MR), además de una dinámica para aprender los movimientos del humano a través de matrices de algoritmos (DLMA). Su función principal era dominar los movimientos realizados durante el balanceo y la fase de reposo. Los ajustaba en la prótesis para dar un movimiento de cadencia óptimo, además de mayor estabilidad al caminar.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
15 Fig.1.8. Prótesis magnetoreológica Rheo Knee (Ossur, 1991).
Fig.1.9. Prótesis inteligente Plus (Zahedi, 1993).
En las publicaciones de (Blumentritt & Werner-Scherer, 1997) se describe el diseño de una prótesis inteligente creada en 1994. Ésta se llamó Otto Bock 3R60 (Fig.1.10), y poseía estabilidad mecánica por el movimiento de los centros instantáneos de rotación. Se consideró como una rodilla policéntrica de 5 barras con 2 grados de libertad, con dos centros mecánicos de rotación. Se inventó para incrementar la estabilidad en la flexión de la rodilla en la fase de postura previa (o inicio de la marcha), ya que permitía que la persona caminara con un movimiento cinemático más normal.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
16 Fig.1.10. OTTO BOCK 3R60 (Blumentritt & Werner-Scherer, 1997)
Fig.1.11. Prótesis policéntrica GEOFLEX (White, 1999)
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
17 Fig.1.12. Total Knee® 2000 (Dupes, 2004).
Fig.1.13. Prótesis Entegra SV Knee (Wiest, 2002).
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
18 Ossur® tenía la “TKO 1500”, una rodilla que permitía al usuario iniciar la flexión mientras el pie estaba todavía sobre el terreno. Estos diseños se apoyaban en un diseño geométrico, con un sistema de bloqueo, que simulaba el movimiento de éstas y tenía una variedad de características para diferentes actividades y niveles de movilidad, incluyendo una característica de posición en flexión. Posteriormente Lord Corp® (Corp, 2003) creó una rodilla policéntrica que podía girar casi en cualquier dirección (Fig.1.14). Ésta supone la emulación natural de la pierna, también puede trabajar bien con personas con amputaciones transfemorales o por encima de la rodilla. El sistema hidráulico con el que cuenta este diseño es ajustable, para cuando las partes bajas de la pierna se adelantan.
En el 2006, se diseñó la prótesis “802 Nylon Knee” (Aulie Devices, 2006) que usaba una combinación de cilindros con mecanismos de tipo sujeción para el manejo de la extensión y flexión de la pierna, así como un control de fricción (Fig.1.15).
Otro diseño de prótesis creado en este año fue el “da Vinci Award Nominee” (Fig.1.16), por C-Leg® (Pahl & Sedlmeier, 2006), que tenía un control remoto para los cambios de velocidad si se querían dar al momento de caminar o hasta correr, también podía manipularse el momento de oscilación al empezar a dar el paso. Ésta manejaba sistemas hidráulicos controlados electrónicamente. Los materiales de construcción eran aluminio y carbón, haciéndola más ligera. Al microprocesador que gobierna la prótesis le llegan las señales de todos los sensores utilizados para el control de velocidad, posición, esfuerzos, etc.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
19 Fig.1.15. Rodilla de Nylon 802 (Aulie Devices, 2006).
Fig.1.16. Prótesis inteligente “da Vinci Award Nominee” (Pahl & Sedlmeier, 2006).
Actualmente, en el ámbito nacional, se tienen propuestas de prótesis para miembro inferior, como las desarrolladas por alumnos de la Unidad Profesional Interdisciplinaria de Ingeniería y Tecnología Avanzada (UPIITA): “Construcción de un Mecanismo de Rodilla tipo Policéntrica para personas con Amputación Femoral” (Moreno-Romero, 2003) y “Prótesis de rodilla con pistón magnetoreológico” (Alonso-Areguin, 2005), entre otras; también hay diseños de prótesis para miembro superior, como el reportado en “Caracterización cinemática e implementación de una mano robótica multiarticulada“ (Velázquez-Sánchez, 2008). En la Universidad Autónoma de México se han desarrollado trabajos como “Prótesis Inteligentes” (Dorador-González, 2005) y “Diseño de un socket ajustable para prótesis de miembro inferior” (Farah-Simón et al., 2006).
1.6 Planteamiento del problema.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
20 diversas tipologías que pueden cambiar según el caso. Esta falta de homogeneidad ha servido para la creación de varios métodos para resolver problemas de síntesis, entre los que se encuentran los métodos de optimización.
La etapa de síntesis dimensional es la más estudiada y existen numerosos métodos de resolución, sin embargo y pese a que han existido varios planteamientos en los problemas, ninguno ha sido concluyente porque todos presentan algún tipo de inconveniente. En el caso de los métodos exactos, se tienen problemas como la exigencia de cumplir con los requisitos, que pueden ser los puntos de precisión con total exactitud. Sin embargo, esta exigencia no es tan práctica porque no es posible reproducir exactamente los modelos diseñados debido a factores como las tolerancias de fabricación, holguras en los pares cinemáticos y deformaciones de los elementos del mecanismo durante su funcionamiento. El número de puntos de precisión es limitado y depende del tipo de mecanismo que se utilice.
De aquí el surgimiento de los métodos de síntesis aproximados que tiene dos objetivos principales: dar al planteamiento una orientación hacia la resolución mediante herramientas de programación y plantear estrategias de búsqueda del óptimo global dentro del espacio de diseño, también busca una solución que usualmente no es única y el número de requerimientos de diseño no es una limitación.
Por otro lado, durante años se han diseñado diversas configuraciones de mecanismos como los de eje simple y eje policéntrico para las prótesis para miembro inferior, pero han sido en su mayoría para gente con características antropomórficas distintas a las de este país, lo que motiva a diseñar una prótesis que asemeje los movimientos lo más posible al cuerpo humano y cubra las necesidades de la población mexicana.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
21 diferencias en las longitudes de los eslabones y en la posición de las articulaciones que los unen puede generar grandes cambios en el comportamiento cinemático de los mecanismos.
Sintetizando un mecanismo, el objetivo es controlar el movimiento realizado durante el balanceo y la fase de reposo para dar un movimiento de cadencia óptimo, además de ofrecer una mayor estabilidad al caminar a través de un mecanismo policéntrico, el cual posee una biomecánica de desplazamiento y cadencia de paso distinta de la marcha normal de un individuo con sus extremidades naturales, pero que se tendrá que mejorar para conseguir la comodidad y funcionalidad en dicha prótesis.
Este trabajo en conjunto con estudiantes de licenciatura, maestría y doctorado participantes del proyecto CONACYT, proyecto 2005/49701 “Robótica y Microtecnología aplicada en la Ingeniera Biomecánica para el Desarrollo de Prótesis y Equipo con Tecnología Nacional” y los proyectos “Análisis y síntesis de un mecanismo antropomórfico subactuado para el desarrollo de prótesis robótica, diseño y construcción del prototipo” con número de registro 20071298 y “Caracterización de la dinámica del cuerpo humano mediante un sistema basado en acelerómetros micro-electro-mecánicos (MEMS)” con número de registro SIP20082296 , proyectos PIFI del IPN, se creará una prótesis inteligente para miembro inferior, que tiene como principal objetivo cubrir necesidades como flexión, extensión, control en el balance, y seguimiento de trayectorias predefinidas por el movimiento natural de la pierna. El diseño está dirigido para que sea fabricado con materiales de buena calidad y de más fácil acceso en el mercado nacional, sencillo uso del dispositivo y sobre todo viable económicamente, lo que permite considerar el impacto que habrá en la reducción de costos al fabricar prótesis ortopédicas con tecnología nacional.
1.7 Objetivos del proyecto y organización de la tesis.
El objetivo general de esta tesis, es desarrollar herramientas de computación evolutiva para la síntesis de mecanismos policéntricos con aplicación en la biomecánica.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
22 • Plantear una función objetivo que resuelva un problema de síntesis de optimización
de mecanismos necesarios para evaluar varias cantidades de puntos y trayectorias. • Diseñar un mecanismo que cubra las especificaciones impuestas para generar el
movimiento de una rodilla humana.
• Probar la viabilidad práctica de la estrategia planteada mediante la implementación de los algoritmos genéticos capaz de resolver casos prácticos de síntesis.
Con base en los objetivos planteados, este trabajo se ha organizado de la siguiente manera:
En el Capítulo 1, Estado del Arte, se presentan los métodos para la síntesis de mecanismos más utilizados durante los últimos años, las principales técnicas de computación inteligente, entre las que destacan los algoritmos genéticos, la lógica difusa y las redes neuronales. También se presenta la optimización en la síntesis de mecanismos utilizando estas técnicas para ser aplicados en las prótesis robóticas inteligentes para miembro inferior, caso de aplicación de este trabajo. Se describe el planteamiento del problema y los objetivos propuestos para resolver la problemática existente en fase de marcha utilizando una prótesis.
En el Capitulo 2, Fundamentos Teóricos, se da una introducción a los aspectos teórico-prácticos, se presentan los fundamentos teóricos para el análisis y la síntesis de mecanismos indicando métodos numéricos y de optimización, para el caso de estudio se presenta el rango de movimiento de la rodilla como base para la simulación.
En el Capitulo 3, Simulación y síntesis de mecanismos, se presenta la síntesis y el análisis de mecanismos planares para generar trayectorias predefinidas de mecanismos de 4 y 6 barras. Para la síntesis de mecanismos se emplean los algoritmos genéticos como métodos de optimización y búsqueda para las dimensiones de los eslabones y los ángulos de movimiento.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
23 En el Capítulo 5, Análisis y discusión de resultados, se presentan los resultados obtenidos al aplicar algoritmos genéticos a diversas configuraciones de mecanismos aplicados a una prótesis para miembro inferior.
1.8 Sumario.
En este capítulo se presentaron los avances que han existido en la síntesis de mecanismos. Se enumeraron los métodos más utilizados y las mejoras que han aportado en esta rama de la mecánica. Se hizo un énfasis en la aportación que han tenido las herramientas computacionales y las técnicas de computación inteligente como los algoritmos genéticos y la lógica difusa, en la optimización de estos mecanismos para obtener respuestas más viables y óptimas en cuanto a las diversas necesidades de los usuarios, resaltando los algoritmos genéticos como método de búsqueda.
Se describió la importancia de los algoritmos genéticos para mejorar la síntesis de mecanismos, ya que principalmente sirven para eliminar las limitaciones y ayudan a tener una exactitud en los puntos de precisión delimitados por el diseñador, con lo que se obtiene una reducción de tiempo computacional y derivaciones de las ecuaciones obligatorias de una función objetivo específico. También se mostro que puede haber combinación de los algoritmos genéticos con un controlador de lógica difusa para monitorear el comportamiento de las variables de diseño durante el corrimiento de los AG y poder modificar los resultados para una mejor optimización.
Por otro lado se mencionaron los tipos de mecanismos que se utilizan actualmente en la fabricación de prótesis inteligentes, lo que sirve de base para determinar que configuración de mecanismos se puede utilizar para mejorar el rendimiento de la prótesis y asi poder cubrir las necesidades del usuario.
Por último se presentó una reseña historia de las prótesis inteligentes que han existido y la forma como han mejorado para lograr un movimiento más cercano al del miembro inferior perdido.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
25
FUNDAMENTOS TEÓRICOS
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
26
2.1 Generalidades.
Para estudiar un mecanismo se tiene que hacer un análisis estructural, cinemático y dinámico, con el cual se desarrollará la fase analítica, la construcción geométrica, las dimensiones significativas de los eslabones y la posición inicial en la que el mecanismo debe trabajar para cubrir las necesidades impuestas. El análisis cinemático se apoya en los requerimientos de movimientos relativos de los eslabones y se expresa en términos de desplazamientos lineales, velocidades y aceleraciones. El análisis dinámico está formado por la fuerza y el movimiento aplicado a las articulaciones del mecanismo, considerándolo como un cuerpo rígido, partiendo del hecho que se conocen los movimientos. El análisis estructural es en el que se determinan los esfuerzos y deformaciones que se presentan en los mecanismos, en esta parte se establecerá el factor de seguridad que relaciona la resistencia considerando las cargas y los materiales. Este capítulo se enfocará al análisis cinemático, en el cuál, para plantear y dar solución al modelo, es necesario establecer una relación geométrica entre los elementos que conforman la cadena cinemática, proponiendo algunos métodos de solución como son Newton Raphson, Algebra Compleja y Algoritmos Genéticos para las diferentes configuraciones de los mecanismos.
2.2 Análisis y Síntesis de mecanismo
Para desarrollar la síntesis de un mecanismos se tiene que realizar el análisis cinemático, dinámico y estructural (Erdman & Sandor, 1998):
Cinemática:
• Generación de función: Es la que determina la coordinación de posición, velocidad y/o aceleración de entrada/salida.
• Conducción de cuerpo rígido: Es la generación del movimiento.
• Generación de trayectoria: Es la generación de la curva acopladora, aquí se analiza la posición, velocidad y/o aceleración en puntos a lo largo de una trayectoria puntual.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
27 Dinámica:
• Balanceo: Son las fuerzas y/o momento de sacudidas inerciales.
• Fuerza de inercia: Son las fuerzas de inercia, dinámica de máquinas o análisis cinetoestático.
• Respuesta movimiento-tiempo: Está el balanceo entrada-par de torsión o la síntesis fuerza-sistema.
• Efectos de holguras y tolerancias.
• Dinámica de cuerpo elástico: Eslabón flexible y cinetoelastodinámica.
Para describir la relación de rotación y traslación entre los elementos de una cadena cinemática, (Denavit & Hartenberg, 1955) propusieron, un método matricial para establecer de forma sistemática, un sistema de coordenadas ligado al cuerpo para cada elemento de la cadena articulada.
La convención propuesta por (Denavit & Hartenberg, 1955) llevada al área de manipuladores robóticos considera cuatro parámetros importantes:
1. Se lleva al manipulador a una posición inicial, que servirá de referencia para medir los desplazamientos del sistema.
2. Se numeran los eslabones del sistema, comenzando por 0 para la base del robot, hasta n para el efector final.
3. Se numeran las articulaciones del sistema, comenzando por 1 para la primer articulación y n para la última; donde n= número de grados de libertad.
4. Los sistemas de coordenadas se asignarán en donde se interceptan el eslabón i-1 con la articulación i con base en lo siguiente:
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
28 Para dar solución al modelo dinámico se tienen que tomar en cuenta el movimiento de rotación y el de traslación para poder determinar las fuerzas que actúen sobre los eslabones al estar el mecanismo en movimiento.
2.3 Clasificación de mecanismos.
Los mecanismos por sus similitudes y diferencias pueden ser planos, esféricos y espaciales (Shigley, 1988). En los planos todas las partículas describen curvas planas en el espacio y se encuentran en planos paralelos, esto hace posible que el lugar geométrico de cualquier punto seleccionado se represente con su verdadero tamaño y forma real en un solo dibujo. El movimiento plano requiere también que los ejes de todos los pares prismáticos y todos los ejes de revolución sean normales al plano de movimiento. En los mecanismos esféricos cada eslabón tiene algún punto que se mantiene permanente conforme el eslabonamiento se mueve y los puntos estacionarios de todos ellos están en una ubicación común. En el caso de este eslabonamiento, los ejes de todos los pares de revolución se deben intersectar en algún punto. Los mecanismos espaciales no incluyen restricciones en los movimientos relativos de las partículas. Debido a las características del objeto de estudio, lo más adecuado es trabajar con mecanismos planos y posteriormente mecanismos espaciales.
2.3.1 Mecanismos Planos
Se le llama así cuando las trayectorias de los puntos móviles del mecanismo se encuentran en un solo plano o en planos paralelos. Las posiciones sucesivas de un punto en movimiento definen una recta o una curva, que representa las posiciones sucesivas de éste, conocido como trayectoria del punto en movimiento en el sistema de coordenadas de referencia. En problemas en el plano, conviene expresar un vector especificando su magnitud y dirección en notación polar. El lugar geométrico de cualquier punto de un mecanismo plano se representa con su verdadero tamaño y forma real, en un solo dibujo o figura. La transformación del movimiento de cualquier mecanismo de esta índole se llama coplanar (Shigley, 1988).
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
29 2.3.1.1 Mecanismo plano de 4 barras.
Para el análisis cinemático de un mecanismo plano de cuatro barras, se tienen que determinar ciertas restricciones (Shigley, 1988):
• Determinación del número de grados de libertad: Éste se puede calcular a partir del número de coordenadas dependientes y del número de ecuaciones de restricción independientes. • El problema de posición inicial: Consiste en calcular la posición inicial del sistema
(coordenadas dependientes) a partir de los valores de los grados de libertad (coordenadas independientes) y de las dimensiones de los distintos elementos. El problema del análisis de posición es determinar los valores de todas las variables (posiciones de todos los puntos y articulaciones) dadas las dimensiones de cada eslabón, y el valor o valores de las variables independientes, es decir aquellas que se escogen para representar los grados de libertad del mecanismo.
• El Problema de los desplazamientos finitos: sirve para calcular una nueva posición del sistema a partir de unos incrementos finitos de las coordenadas independientes.
• Análisis de velocidades: Calcula las velocidades dependientes a partir de las independientes. • Análisis de aceleraciones: Calcula las aceleraciones dependientes a partir de todas las
velocidades y de las aceleraciones independientes. 2.3.1.1.1 Grados de libertad.
En un sistema, los grados de libertad (GDL) son el número de parámetros independientes (medidas) que se necesitan para definir unívocamente su posición en el espacio en cualquier instante. Para determinar los GDL totales de un mecanismo se debe tener en cuenta el número de eslabones y articulaciones, así como las interacciones entre ellos. De acuerdo a la condición de Kutzbach (Shigley, 1988), un eslabón cualquiera en un plano tiene 3 GDL antes de conectarse entre sí, cuando se mueven en relación al eslabón fijo. Sin contar este último, un mecanismo de n eslabones posee 3(n-1) grados de libertad antes de conectar cualquiera de las articulaciones. Cuando las restricciones de todas las articulaciones se restan del total de grados de libertad de los eslabones no conectados, se encuentra la movilidad resultante del mecanismo conectado. Este razonamiento conduce a la ecuación de Kutzbach:
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
30 En donde:
m = Grados de libertad, n = Número de eslabones, j1= Numero de pares de un solo grado de
libertad, j2= Número de pares con dos grados de libertad.
Para un mecanismo de 4 barras, los grados de libertad son:
m= 3(4-1)-2(2)-0=1 (2.2)
Para un mecanismo de 6 barras los grados de libertad son:
m= 3(6-1)-2(7)-0=1 (2.3)
Si este criterio da m > 0, el mecanismo posee m grados de libertad. Si m=1, este se puede impulsar con un solo movimiento de entrada, si m=2, se necesitan dos movimientos de entrada separados para producir un movimiento restringido del mecanismo. Si m=0 el movimiento es imposible y forma una estructura.
2.3.1.1.2 Ley de Grashof.
Esta ley afirma que para un eslabonamiento plano de cuatro barras (Figura 2.1), la suma de las longitudes más corta y más larga de los eslabones no puede ser mayor que la suma de las longitudes de los eslabones restantes (Figura 2.2), si se desea que exista una rotación relativa continua entre dos elementos (Tabla 2.1). Para el tipo de problema a resolver, el mecanismo con cambio de punto es el más adecuado.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
31 Tabla 2.1 Clasificación de Grashof para mecanismos de 4 barras (Martin et al., 2007).
Tipo de mecanismos Barra más corta
Relación entre la longitud de las barras
Eje inestable del balancín
Manivela s + l < p + q
Fricción en el acoplamiento
Tierra s + l < p + q
Doble balancín Acoplamiento s + l < p + q
Cambio de punto Cualquiera s + l = p + q
Triple eje de balancín Cualquiera s + l > p + q
Siendo s=longitud del eslabón más corto, l=longitud del eslabón más largo, p=longitud del eslabón restante y q=longitud del eslabón restante.
Figura 2.2. Tres inversiones del cuadrilátero de Grashof (Martin et al., 2007).
Esta ley aplica principalmente para mecanismos de cuatro eslabones, pero si se quiere analizar uno de seis, como el tipo Watt, se puede considerar como dos eslabonamientos de cuatro barras conectados en serie y que tienen dos eslabones en común. El tipo Stephenson puede considerarse como dos eslabonamientos de cuatro barras conectados en paralelo y que tienen dos eslabones en común.
2.3.1.1.3 Análisis de posición, velocidad y aceleración.
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
32 posición con respecto al tiempo para obtener velocidades; se derivan luego éstas con el fin de tener las expresiones de aceleración (Norton, 1999).
2.3.1.1.4 Espaciamiento de Chebychev
Si θ2 es la posición angular del eslabón 2, en un eslabonamiento de cuatro barras, y θ4 es la posición
angular del eslabón 4, entonces uno de los problemas de la síntesis cinemática es encontrar las dimensiones del eslabonamiento de tal manera que en donde f es cualquier relación funcional deseada. Aunque el problema no sea resuelto, es posible especificar hasta 5 valores para
θ2 llamados puntos de precisión y encontrar un eslabonamiento que satisfaga la relación deseada
para la función y luego seleccionar de 2 a 5 puntos de precisión a partir de la gráfica para utilizarlos en la síntesis (Freudenstein & Sandor, 1964). Si el proceso tiene éxito, la relación funcional se satisface para estos puntos; pero ocurrirán desviaciones en otros. Uno de los principales problemas de diseño de eslabonamiento consiste en seleccionar un conjunto de puntos de precisión para utilizarlos en la síntesis, de tal modo que se minimice el error estructural o los puntos que se presentan en las desviaciones.
Como primera aproximación, el mejor espaciamiento es el de Chebychev. Para n puntos en un intervalo ,el espaciamiento según (Freudenstein & Sandor, 1964, Shigley, 1988) es:
donde j=1,2,…n y xjson los puntos de precisión.
Estos puntos se obtienen gráficamente construyendo primero un círculo cuyo diámetro es el intervalo Δx dado por la ecuación:
∆ (2.4)
I.P.N SEPI E.S.I.M.E UNIDAD ZACATENCO
33 contra x, se pueden determinar visualmente los ajustes que se deben hacer en los puntos de precisión para la aproximación siguiente. Ejemplo:
∆
1 1 1
. 1 . 1 cos 1 1 1.
Figura 2.3 Ejemplo de Espaciamiento de Chebychev de 5 puntos de precisión.
2.3.1.1.5 Síntesis de mecanismos manivela oscilador