ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LOPEZ MATEOS”
“IMPLEMENTACIÓN DE UNA RED DEVICENET
PARA LA AUTOMATIZACIÓN DE UN SIMULADOR GENERADOR DE OLAS”
TESIS
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN:
RAMÍREZ SIERRA JESÚS DAMIÁN ROCHA SÁNCHEZ ÁNGEL SÁNCHEZ RESÉNDIZ EFRAÍN
ASESORES:
M. EN C. HUERTA GONZÁLEZ PEDRO FRANCISCO M. EN C. TORRES RODRÍGUEZ IVONE CECILIA
Agradecimientos
Dedicamos la presente como agradecimiento al apoyo brindado durante estos
años de estudio y como un reconocimiento de gratitud al haber finalizado
esta carrera.
En testimonio de la gratitud ilimitada al término de esta etapa de nuestras
vidas, queremos expresar un profundo agradecimiento a quienes con su
ayuda, apoyo y comprensión nos alentaron a lograr esta hermosa realidad.
A Dios por permitirnos vivir este momento.
Sabiendo que jamás existirá una forma de agradecer una vida de lucha,
sacrificio y esfuerzo agradecemos a nuestros padres, porque gracias a su
cariño, guía y apoyo hemos llegado a realizar uno de los anhelos más
grandes de nuestras vidas, terminar nuestros estudios profesionales.
A nuestros hermanos y a todas las personas que nos es imposible
mencionar, pero que saben quienes son, por el apoyo recibido.
Al IPN y ESIME por la formación integral personal y profesional.
Resumen
El presente trabajo muestra la implementación de redes de comunicación industrial basadas en la arquitectura NetLinx de la empresa Rockwell Automation, para implementar un sistema de automatización en un simulador generador de olas, instalado en el laboratorio de investigación de puertos y costas de la ESIA Zacatenco del IPN.
Se utiliza una plataforma de control Logix, donde se integra una red DeviceNet para conectar dispositivos de campo de tipo hidráulico y sensores, utilizando módulos de E/S analógicas y digitales distribuidas.
También se emplea una red EtherNet/IP como columna para comunicar, configurar y posteriormente programar los dispositivos de campo. Los resultados obtenidos del oleaje generado en el laboratorio se podrán visualizar y monitorear mediante una HMI que será desarrollada posterior a este trabajo en el software LabVIEW, e instalada en un cuarto de control.
Índice General
Resumen ... I Índice General ... ¡Error! Marcador no definido.
Índice de Figuras ... V Índice de Tablas ... VIII Objetivo General ... X Objetivos Específicos ... X Justificación ... X
CAPÍTULO 1 GENERALIDADES ... 1
1.1 Oleaje ... 2
1.2 Clasificación de las Olas ... 2
1.3 Principios de Operación de los Generadores ... 3
1.4 Laboratorios de Ingeniería Hidráulica en México ... 4
1.4.1 Instituto Mexicano del Transporte; Laboratorio de Hidráulica Marítima ... 4
1.4.2 Instituto Politécnico Nacional; Escuela Superior de Ingeniería y Arquitectura; Laboratorio de Puertos y Costas ... 6
1.5 Hipótesis ... 7
CAPÍTULO 2 MARCO TEÓRICO ... 8
2.1 Controladores de Automatización Programables (PAC’s) ... 9
2.1.1 Principales Características de los PAC´s ... 10
2.3 Red de Comunicación Industrial EtherNet/IP ... 11
2.3.1 Topología de Redes ... 12
2.3.1.1 Topología Tipo Bus ... 13
2.3.1.2 Topología Tipo Estrella ... 13
2.3.2 Cable Utilizado en las Redes EtherNet ... 14
2.3.2.1 Cable UTP ... 14
2.3.2.2 Categorías ... 15
2.3.3 Conectores ... 15
2.3.3.1 Cable Directo ... 15
2.3.3.1 Cable Cruzado ... 16
2.3.4 Tarjeta de Red ... 17
2.3.5 Conmutador o Switch ... 17
2.4 Red de Comunicación Industrial DeviceNet ... 18
2.4.1 Características de Funcionamiento ... 21
2.4.2 Capa Física ... 21
2.4.2.1 Topología ... 21
2.4.2.2 Cables ... 23
2.4.2.3 Conectores ... 24
2.4.2.4 Taps ... 24
2.4.2.6 Fuente de Alimentación ... 26
2.4.3 Capa de Enlace, Red y Transporte ... 27
2.4.3.1 Modos de Comunicación ... 27
2.4.3.2 Bus CAN ... 27
2.4.4 Capas Superiores ... 29
2.4.5 Dispositivos para la Red De Campo DeviceNet ... 29
2.4.5.1 Plataforma de Control ... 31
2.4.5.2 Herramientas de Software ... 31
2.4.5.3 Dispositivos de Entradas/Salidas o I/O Device ... 33
2.4.5.4 Interfaz de Operador ... 34
2.4.5.5 Configuración de los Dispositivos DeviceNet ... 34
CAPÍTULO 3 SELECCIÓN DE DISPOSITIVOS, DISEÑO E IMPLEMENTACIÓN DEL SISTEMA DE AUTOMATIZACIÓN ... 35
3.1 Dispositivos de Entradas y Salidas (E/S) ... 36
3.1.1 Controlador AB CompactLogix 1769-L35E ... 36
3.1.1.1 Puerto EtherNet/IP ... 37
3.1.1.2 Fuente de Alimentación Eléctrica 1769-PA4 ... 38
3.1.1.3 Módulo Escáner 1769-SDN DeviceNet ... 39
3.1.1.4 Módulo de Entradas Digitales 24 VDC 1769-IQ16 Drenador/Surtidor . 41 3.1.1.5 Módulo de Salidas Digitales 24 VDC 1769-OB16 Surtidor ... 42
3.1.2 AB CompactBlock LDX ... 43
3.1.2.1 Características de Hardware ... 44
3.1.2.2 Dirección de Nodo. ... 44
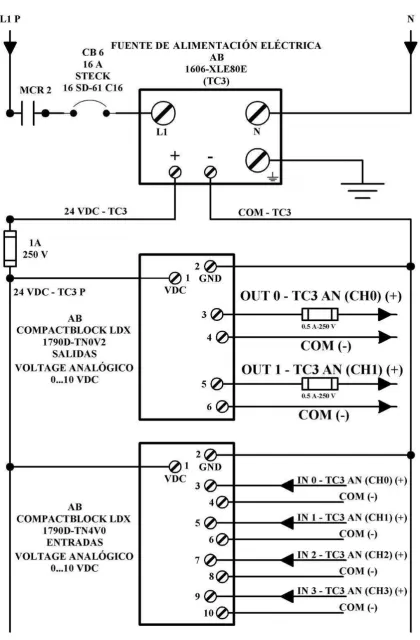
3.1.2.3 AB CompactBlock LDX 1790D-TN4V0, Entradas Voltaje Analógico .... 45
3.1.2.4 AB CompactBlock LDX 1790D-TN0V2, Salidas Voltaje Analógico ... 46
3.1.2.5 AB CompactBlock LDX 1790D-T8BV8V, E/S Digitales 24VDC ... 48
3.1.3 Servo Drive Parker Compax3 Fluid ... 49
3.2 Fuentes de Alimentación Eléctricas ... 51
3.2.1Fuente de Alimentación Eléctrica AB 1606-XLE80E ... 51
3.2.2 Fuente de Alimentación Eléctrica AB 1606-XLE120EN... 51
3.2.3 Fuente de Alimentación Eléctrica HENGFU HF70W-SF-24 ... 51
3.2.4 Bloque de Alimentación Eléctrica Weidmuller Ltd. 9915490000 ... 52
3.3 Dispositivos de Protección y Seguridad ... 52
3.3.1 Interruptores Termomagnéticos ... 52
3.3.1.1 Interruptores Termomagnéticos Steck SD-61 C ... 52
3.3.1.2 Interruptor Termomagnético Siemens 5SX4 ... 52
3.3.2 Relevadores de Control Maestro ... 53
3.3.2.1 Relevador de Control AB 700-HA33A1 ... 53
3.3.2.2 Relevador de Control Omron MK2P-S ... 53
3.3.3 Relevadores de Control de Conmutación ... 54
3.3.3.1 Relevador de Control ABB CR-P024DC1 ... 54
3.3.4 Columna Luminosa de Señalización ABB KX70 ... 55
3.4 Conmutador (Switch) TRENDNet TE100-S8 ... 55
3.5 PowerTap AB 1485T–P2T5–T5 Serie C... 55
3.6 Dispositivos Finales para la Generación de Oleaje ... 56
3.6.1 Servo Válvula Electrohidráulica MOOG G631 ... 56
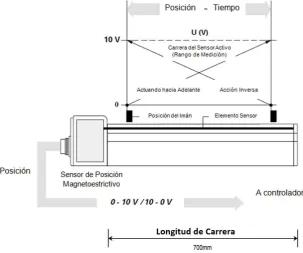
3.6.2 Sensor TEMPOSONICS EP ... 58
3.6.3 Dispositivo Mecánico (Paleta) ... 59
3.6.4 Unidad Hidráulica ... 59
3.6.5 Actuador Hidráulico ... 60
3.7 Laboratorio de Puertos y Costas de ESIA Zacatenco ... 60
3.8 Diagramas Eléctricos ... 61
3.9 Integración de Dispositivos e Implementación de Redes ... 77
3.9.1 Topología Red EtherNet/IP ... 77
3.9.2 Topología Red DeviceNet ... 78
3.9.2.1 Calculo de la Fuente de Alimentación ... 78
3.9.3 Descripción del Proceso de Automatización ... 80
CAPÍTULO 4 CONFIGURACIÓN DE REDES Y DISPOSITIVOS ... 93
4.1 Asignación de Direcciones IP ... 94
4.1.1 Dirección IP de PC’s (PC de Campo, PC-HMI) ... 94
4.1.2 Dirección IP del Controlador ... 95
4.2 Configuración del Driver EtherNet/IP ... 97
4.3 Configuración de la Red DeviceNet ... 99
4.3.1 Configuración de los Dispositivos ... 100
4.4 Configuración del Controlador a través de RSLogix 5000 ... 105
4.4.1 Adición de módulos ... 107
4.4.2. Direccionamiento de Datos ... 108
4.4.3 Generación de Tags DeviceNet ... 111
CAPÍTULO 5 ANÁLISIS DE RESULTADOS ... 114
5.1 Resultados Obtenidos en la Selección de Dispositivos e Implementación de Redes. ... 115
5.2 Colocación y Distribución de los Tableros de Control Sobre el Tanque y Canal de Pruebas ... 125
5.2.1 Generación de Oleaje en Tanque ... 125
5.2.2 Generación de Olas en Canal ... 125
5.3 Resultados Obtenidos de la Configuración de Redes y Dispositivos. ... 126
5.3.1 Asignación de Memoria para los Nodos en el Controlador... 126
5.4 Diagnóstico de la Red DeviceNet ... 129
5.5 Tags Generados para los Nodos de la Red DeviceNet. ... 132
5.6 Costo del Proyecto ... 139
Glosario ... 140
Conclusiones ... 144
Índice de Figuras Figura 1.1 Fuerzas que Generan el Oleaje Marino ... 3
Figura 1.2 Control General de Oleaje ... 4
Figura 1.3 Laboratorio de Hidráulica Marítima ... 5
Figura 1.4 Laboratorio de investigación IPN-ESIME Zacatenco... 6
Figura 2.1 Topología Tipo Bus ... 13
Figura 2.2 Topología Tipo Estrella ... 14
Figura 2.3 Tipos de Cable Directo ... 16
Figura 2.4 Cable Cruzado ... 16
Figura 2.5 Familia de Redes CIP ... 18
Figura 2.6 DeviceNet en el Contexto de las Estandarizaciones ... 19
Figura 2.7 Familia de Redes CIP ... 20
Figura 2.8 Arquitectura NetLinx de Comunicación, para la Integración de Redes Industriales ... 20
Figura 2.9 Topología Línea-Troncal/Derivaciones de DeviceNet ... 22
Figura 2.10 Construcción Física del Cable DeviceNet Tipo Round Thick ... 23
Figura 2.11 Conectores Abiertos Plug-in: (a) 5 Pines; (b) 10 Pines ... 24
Figura 2.12 PowerTap: (a) Construcción Física; (b) Esquema de Conexión .... 25
Figura 2.13 Conexión de la Resistencia de Termino ... 26
Figura 2.14 Esquema de Conexión de una Fuente de Poder en un Medio Tipo Round ... 26
Figura 2.15 Niveles de Voltajes CAN Utilizados para Representar un Bit Dominante o uno Recesivo ... 28
Figura 2.16 Representación Esquemática de los Valores Nominales de Voltaje de las Señales del Bus CAN Definidos para DeviceNet ... 29
Figura 2.17 Componentes de la Red DeviceNet ... 31
Figura 2.18 Esquema de una Plataforma de Control DeviceNet ... 31
Figura 3.1 Controlador Allen Bradley CompactLogix 1769-L35E ... 36
Figura 3.2 CPU 1769-L35E ... 37
Figura 3.3 Descripción del Puerto EtherNet/IP ... 38
Figura 3.4 Características Físicas del Módulo 1769-SDN ... 40
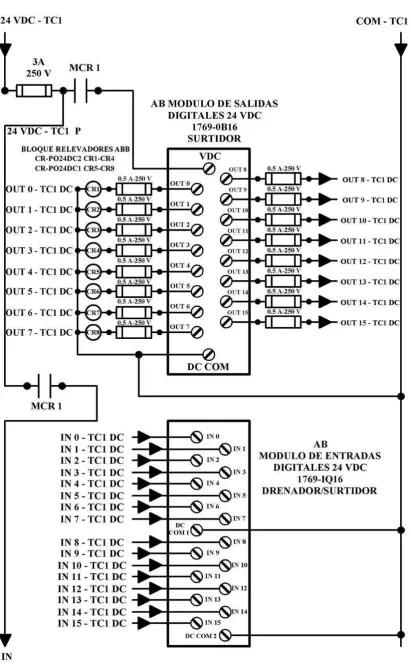
Figura 3.5 Módulo de Entradas Digitales: (a) Conexión de Dispositivos de Campo; (b) Etiquetas y Bornes ... 41
Figura 3.6 Módulo de Salidas Digitales: Conexión de Dispositivos de Campo; (b) Etiquetas y Bornes ... 42
Figura 3.7 Características Físicas de los Módulos ... 44
Figura 3.8 Interruptores Manuales de Direccionamiento de Nodo ... 44
Figura 3.9 Cableado a las Terminales de Entrada del Módulo ... 45
Figura 3.12 Conexión Interna PowerTap ... 56
Figura 3.13 Esquema de Conexión: (a) Configuración Interna; (b) Símbolo .... 57
Figura 3.14 Conexión Eléctrica ... 57
Figura 3.15 Desplazamiento del Sensor LVDT ... 58
Figura 3.16 Dispositivo Mecánico (Paleta) ... 59
Figura 3.17 Unidad Hidráulica ... 59
Figura 3.18 Actuador Hidráulico ... 60
Figura 3.19 Laboratorio de Puertos y Costas de ESIA Zacatenco ... 60
Figura 3.20 Dimensiones del Laboratorio ... 61
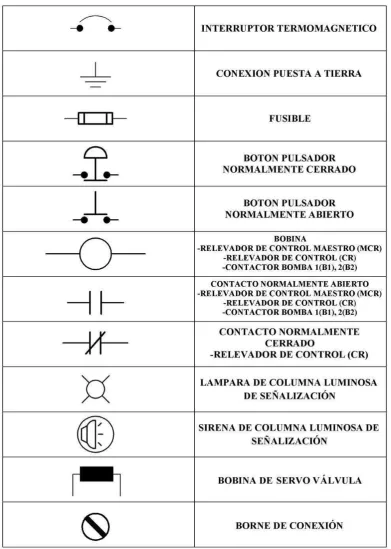
Figura 3.21 Simbología ... 66
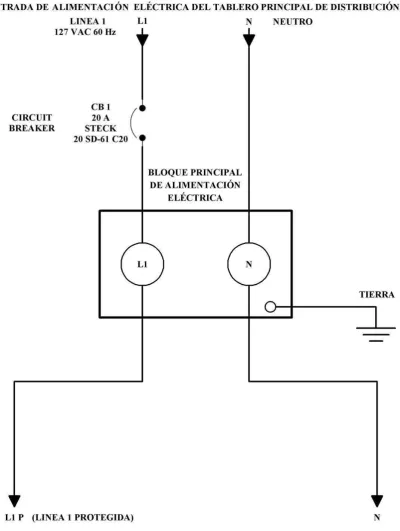
Figura 3.22 Tablero de Control 1 (TC1); Bloque de Alimentacion Principal ... 67
Figura 3.23 Tablero de Control 1 (TC1); Fuentes de Aliementacion Electricas 68 Figura 3.24 Tablero de Control 1; Relevadores de Control ... 69
Figura 3.25 Tablero de control 1; Controlador de Automatizacion Programable ... 70
Figura 3.26 Tablero de Control 2; Módulos de E/S Distribuidas ... 71
Figura 3.27 Tablero de Control 3; Módulos de E/S Distribuidas ... 72
Figura 3.28 Tablero de Control 4; Módulos de E/S Distribuidas ... 75
Figura 3.29 Tablero de Control 5; Servo Drive ... 75
Figura 3.30 Tablero de Control 5; Servo Drive y Sensor LVDT ... 75
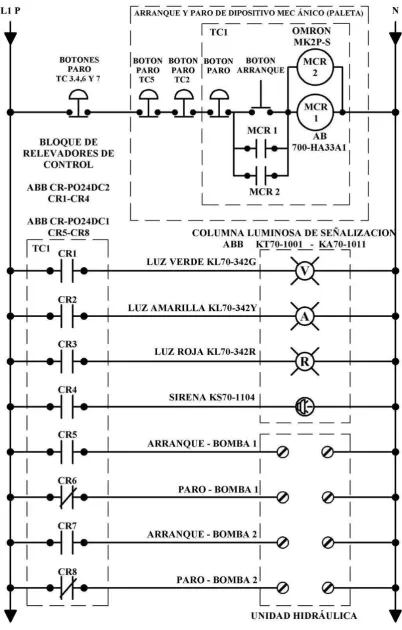
Figura 3.31 Arranque y Paro Automático de la Unidad Hidráulica ... 76
Figura 3.32 Medio Físico: (a) Cable (UTP); (b) Conector RJ-45 ... 77
Figura 3.33 Topología Red EtherNet/IP ... 77
Figura 3.34 Medio Físico: (a) Cable Redondo Grueso; (b) Conector Abierto .. 78
Figura 3.35 Calculo de la Fuente de Alimentación para DeviceNet ... 79
Figura 3.36 Topología Red DeviceNet ... 80
Figura 3.37 Configuración de Conexiones del Tablero de Control 1 ... 85
Figura 3.38 Configuración de Conexión de los Componentes de la Red EtherNet/IP ... 86
Figura 3.39 Configuración de Conexión de los Tableros de Control 1 y 2 ... 87
Figura 3.40 Configuración de Conexión de los Tableros de Control 2 y 6 ... 88
Figura 3.41 Configuración de Conexión de los Tableros de Control 4 y 7 ... 89
Figura 3.42 Configuraciones Conexión del Tablero de Control 5 y el Actuador Hidráulico ... 90
Figura 3.43 Configuración de Operación de los Componentes Finales para la Generación de Oleaje en el Tanque ... 91
Figura 3.44 Esquema Sintetizado del Proceso de Automatización ... 92
Figura 4.1 Conexión de área local; (a) Estado; (b) Propiedades ... 94
Figura 4.2 Propiedades de Protocolo Internet (TCP/IP) ... 95
Figura 4.3 BOOT-DHCP: (a) Mensaje; (b) Ajustes de Red ... 95
Figura 4.4 Dirección MAC del Controlador ... 96
Figura 4.6 Pantalla de Apertura de RSLinx Classic ... 97
Figura 4.7 RSLinx Classic Gateway: (a) Menú Comunicaciones; (b) Selección del Driver EtherNet/IP ... 97
Figura 4.8 Configuración del Driver: (a) Nombre; (b) Exploración de Subred .. 98
Figura 4.9 Driver Instalado ... 98
Figura 4.10 RSLinx Classic Gateway; RSWho ... 98
Figura 4.11 RSWho: Dispositivos DeviceNet ... 99
Figura 4.12 Pantalla de Apertura de RSNetWorx ... 99
Figura 4.13 Búsqueda de Dispositivos en la Red ... 100
Figura 4.14 Dispositivos Encontrados en la Red ... 100
Figura 4.15 Escáner 1769-SDN: (a) Propiedades Generales; (b) Configuración ... 101
Figura 4.16 Scanlist: (a) Dispositivos Disponibles; (b) Dispositivos Agregados ... 101
Figura 4.17 Parámetros: (a) Nodo 02; (b) Nodo 03 ... 102
Figura 4.18 Parámetros: (a) Nodo 04; (b) Nodo 05 ... 102
Figura 4.19 Parámetros: (a) Nodo 06; (b) Nodo 07 ... 103
Figura 4.20 Mapeo: (a) Nodo 03; (b) Nodo 05 ... 103
Figura 4.21 Mapeo: Nodo 07 ... 104
Figura 4.22 Mapeo: (a) Nodo 02; (b) Nodo 04 ... 104
Figura 4.23 Mapeo: (a) Nodo 06; (b) Nodo 07... 105
Figura 4.24 Pantalla de Apertura de RSLogix 5000 ... 105
Figura 4.25 Características del Controlador ... 106
Figura 4.26 Directorio de Programas y Datos ... 106
Figura 4.27 Adición de Módulos ... 107
Figura 4.28 Adición de Módulo 1769-SDN: (a) Selección; (b) Configuración . 107 Figura 4.29 Adición de Módulos: (a) 1769-IQ16; (b) 1769-OB16 ... 108
Figura 4.30 Módulos Añadidos ... 108
Figura 4.31 Direcciones de Tags Creados Automáticamente por RSLgix 5000 ... 110
Figura 4.32 Direcciones de Entradas ... 111
Figura 4.33 Direcciones de Salidas ... 111
Figura 4.34 Informe de la Generación de Tags ... 112
Figura 4.35 Pantalla de Tags de RSLogix 5000 ... 113
Figura 4.36 Tags Generados para los Dispositivos de la Red DeviceNet ... 113
Figura 5.1 Tablero de Control 1 ... 117
Figura 5.2 Tablero de Control 1; Columna Luminosa de Señalización ... 118
Figura 5.3 Tablero de Control 2 ... 118
Figura 5.4 Tablero de Control 3 ... 119
Figura 5.5 Tablero de Control 4 ... 119
Figura 5.6 Tablero de Control 7 ... 120
Figura 5.8 Conexión Física de la Unidad Hidráulica ... 121
Figura 5.9 Montaje del Actuador Hidráulico sobre el Dispositivo Mecánico .. 121
Figura 5.10 Conexion Fisica de los Elementos Finales para la Generacion de Oleaje ... 122
Figura 5.11 Colocación y Distribución de los Tableros de Control ... 122
Figura 5.12 Configuración de los Elementos Finales para la Generación de Olas en el Tanque de Pruebas Parte Frontal ... 123
Figura 5.13 Elementos Físicos para la Generación de Olas en el Tanque de Pruebas Parte Frontal ... 123
Figura 5.14 Configuración de los Elementos para la Generación de Olas en el Tanque de Pruebas Parte Lateral Derecha ... 124
Figura 5.15 Elementos Físicos para la Generación de Olas en el Tanque de Pruebas Parte Lateral Derecha ... 124
Figura 5.16 Configuración de Elementos Finales para la Generación de Olas en el Canal de Pruebas ... 125
Figura 5.17 Canal de Pruebas: (a) canal; (b) Dispositivo Electromecánico Generador de Olas en Canal ... 125
Figura 5.18 Mapeo de Entradas, Nodos: 03, 05 y 07 ... 127
Figura 5.19 Mapeo de Salidas, Nodos: 02, 04 y 06 ... 128
Figura 5.20 Diagnostico de Red DeviceNet ... 129
Figura 5.21 Tags Nodo 02: (a) Out 0 (CH0); (b) Out 1 (CH1) ... 133
Figura 5.22 Tags Nodo 03: (a) In 0 (CH0); (b) In 1 (CH1) ... 133
Figura 5.23 Tags Nodo 03: (a) In 2 (CH2); (b) In 3 (CH3) ... 134
Figura 5.24 Tags Nodo 03: Registro de Estado ... 134
Figura 5.25 Tags Nodo 04: (a) Out 0 (CH0); (b) Out 1 (CH1) ... 135
Figura 5.26 Tags Nodo 05: (a) In 0 (CH0); (b) In 1 (CH1) ... 135
Figura 5.27 Tags Nodo 05: (a) In 2 (CH2); (b) In 3 (CH3) ... 136
Figura 5.28 Tags Nodo 05: Registro de Estado ... 136
Figura 5.29 Tags Nodo 06: (a) Out 0 (CH0); (b) Out 1 (CH1) ... 137
Figura 5.30 Tags Nodo 07: (a) In (0-7); (b) Out (0-7) ... 137
Índice de Tablas Tabla 1.1 Tipos de Olas ... 3
Tabla 2.1 Categorías Cable UTP ... 15
Tabla 2.2 Principales Características de la Red DeviceNet ... 21
Tabla 2.3 Tasas de Transmisión Definidas por DeviceNet y Distancias Máximas según el Medio Físico ... 22
Tabla 2.4 Hilos Conductores Especificados en DeviceNet ... 23
Tabla 2.5 Niveles de Voltaje Definidos para la Señal CAN en DeviceNet ... 28
Tabla 3.1 Especificaciones Eléctricas 1769-PA4 ... 38
Tabla 3.2 Asignación de Datos 1769-SDN ... 40
Tabla 3.4 Especificaciones Eléctricas 1769-IQ16 ... 41
Tabla 3.5 Archivo de Datos 1769-IQ16 ... 42
Tabla 3.6 Especificaciones Eléctricas 1769-OB16 ... 43
Tabla 3.7 Archivo de Datos 1769-OB16 ... 43
Tabla 3.8 Descripción de Etiqueta de Conexión AB 1790D-TN4V0 ... 45
Tabla 3.9 Archivo de Datos AB 1790D-TN4V0 ... 46
Tabla 3.10 Especificaciones Eléctricas AB 1790D-TN4V0 ... 46
Tabla 3.11 Descripción de Etiqueta de Conexión AB 1790D-TN0V2 ... 46
Tabla 3.12 Archivo de Datos AB 1790D-TN0V2 ... 47
Tabla 3.13 Especificaciones Eléctricas AB 1790D-TN0V2 ... 47
Tabla 3.14 Descripción de Etiqueta de Conexión AB 1790D-T8BV8V ... 47
Tabla 3.15 Archivo de Datos AB 1790D-T8BV8V ... 48
Tabla 3.16 Especificaciones Eléctricas AB 1790D-T8BV8V ... 49
Tabla 3.17 Especificaciones Eléctricas Parker Compax3 Fluid ... 49
Tabla 3.18 Bloque de Conectores Parker Compax3 Fluid ... 50
Tabla 3.19 Especificaciones Eléctricas AB 1606-XLE80E ... 51
Tabla 3.20 Especificaciones Eléctricas AB 1606-XLE120EN ... 51
Tabla 3.21 Especificaciones Eléctricas HENGFU HF70W-SF-24 ... 51
Tabla 3.22 Especificaciones Eléctricas Weidmuller Ltd. 9915490000 ... 52
Tabla 3.23 Especificaciones Eléctricas Steck SD-61 C ... 52
Tabla 3.24 Especificaciones Eléctricas Siemens 5SX4 ... 53
Tabla 3.25 Especificaciones Eléctricas AB 700-HA33A1 ... 53
Tabla 3.26 Especificaciones Eléctricas Omron MK2P-S ... 53
Tabla 3.27 Especificaciones Eléctricas ABB CR-P024DC1 ... 54
Tabla 3.28 Especificaciones Eléctricas ABB CR-P024DC2 ... 54
Tabla 3.29 Especificaciones Eléctricas ABB KX70 ... 55
Tabla 3.30 Especificaciones Eléctricas TRENDNet TE100-S8 ... 55
Tabla 3.31 Especificaciones Eléctricas AB 1485T–P2T5–T5 Serie C ... 56
Tabla 3.32 Características Generales MOOG G631 ... 56
Tabla 3.33 Especificaciones Eléctricas MOOG G631 ... 57
Tabla 3.34 Especificaciones Eléctricas TEMPOSONICS EP ... 58
Tabla 3.35 Especificaciones Unidad Hidraulica... 59
Tabla 3.36 Dispositivos de la Red EtherNet/IP... 78
Tabla 3.37 Dispositivos de la Red DeviceNet... 79
Tabla 4.1 Tipos de Tags ... 108
Tabla 4.2 Tipos de Valores ... 109
Tabla 4.3 Tipo de Datos ... 109
Tabla 4.4 Asignación Mínima de Memoria en Tags (4 Bytes [32 bits]) ... 109
Tabla 4.5 Formato de las Direcciones de E/S ... 110
Tabla 5.1 Mapeo de Entradas Red Devicenet ... 127
Tabla 5.2 Mapeo de Salidas Red DeviceNet ... 1298
Tabla 5.3 Informe de Diagnostico ... 129
Objetivo General
Realizar la implementación de una red de dispositivos de control para la automatización de un simulador generador de olas, ubicado en el laboratorio de puertos y costas de la ESIA Zacatenco.
Objetivos Específicos
Seleccionar los dispositivos necesarios para el control del simulador
generador de olas.
Implementar una red DeviceNet para controlar y configurar los dispositivos a
utilizar para el sistema de automatización.
Implementar una red EtherNet/IP para comunicar y configurar los
dispositivos de programación y monitoreo del proceso.
Integrar las Redes DeviceNet y EtherNet/IP al sistema de control.
Justificación
CAPÍTULO
1
1.1 Oleaje
El oleaje es el fenómeno más importante que afecta las costas, además es el principal elemento para el diseño de las estructuras que se utilizan en las zonas costeras y playas. El fenómeno es complejo y difícil de representar de una forma matemática, sin embargo se tienen modelos matemáticos que pueden representar el estado del mar y calcular los efectos del oleaje. Existen varias teorías las cuales se aplican de acuerdo a las condiciones de un problema particular. [1]
Las técnicas de pronóstico de oleaje se desarrollaron después de la Segunda Guerra Mundial y ellas usaban de manera común relaciones empíricas entre la velocidad del viento y la altura de la ola para obtener características del oleaje. Versiones más recientes de los modelos de pronóstico, aún son usadas por simplicidad y eficiencia. Sin embargo, para prácticas de diseño contemporáneo, se requiere el espectro del oleaje, información que no suministraban los modelos anteriores. La aplicación de los conceptos espectrales por Pierson & Marks marcó el comienzo de una nueva era en el pronóstico de oleaje.
Algunos modelos espectrales fueron elaborados por Pierson, Barnett, Ewing y Cardone. En los últimos años se han desarrollado nuevos modelos espectrales de olas con la creciente capacidad computacional y en función de las recientes teorías sobre modelado de olas por el equipo SWAMP y el equipo SWIN.
Las actividades crecientes en las regiones costeras requieren de información más detallada, como la que se obtiene con radares, de la que suministran los modelos a escala global. Sin embargo, el desarrollo de un sistema integrado para diagnóstico y pronóstico de oleaje tienen un compromiso entre equipo computacional, tamaño de área y el tamaño del mallado utilizado para el cálculo numérico. Las limitantes, antes mencionadas, llevan a establecer sistemas integrados de técnicas de pronóstico de oleaje para las costas, donde la información sobre el mismo es necesaria en el manejo y planificación de las actividades marinas y para ello son necesarios laboratorios de hidráulica.
1.2 Clasificación de las Olas
Tabla 1.1 Tipos de Olas
Periodo Tipo Fuerza que la produce Fuerza que Restaura
<0.1 seg Capilares Viento Tensión superficial
0.1 a 1 seg Ultragravedad Viento Tensión superficial,
fuerza y gravedad
1 a 30 seg Gravedad Viento Gravedad
30 seg a 5 min Infragravedad Viento Gravedad
5 min a 12 hr Largo periodo Tormentas y Tsunamis Fuerza de coriolis
24 hr a 30 hr Largo periodo Sol y luna Fuerza de coriolis
>24 hr Muy largo periodo Sol y luna Fuerza de coriolis
Figura 1.1 Fuerzas que Generan el Oleaje Marino
1.3 Principios de Operación de los Generadores
De los diferentes tipos de generadores de olas, el más ventajoso y más sencillo de construir y el que más representa las formas de las olas, es el mecánico figura 1.2. Estos generadores se construyen con una gran diversidad de tipos: paleta o bastidores, articula o tipo pistón, tipo cuña vertical, o bien a un sistema de servo-mecanismos hidráulicos. [1]
Figura 1.2 Control General de Oleaje
1.4 Laboratorios de Ingeniería Hidráulica en México
En el desarrollo y la construcción de grandes obras portuarias, la Ingeniería en México siempre se ha visto apoyada por los Laboratorios de Hidráulica Marítima, de tal forma, que han ayudado a que la Ingeniería Mexicana en estos tiempos sea reconocida a nivel Mundial. [2]
1.4.1 Instituto Mexicano del Transporte; Laboratorio de Hidráulica Marítima
El Laboratorio de Hidráulica Marítima, del Instituto Mexicano del Transporte es único en el país y el mejor equipado de los pocos que existen en Latinoamérica. Infraestructura: [2]
Tanque de olas mayor mostrado en la figura 1.3. Tiene dimensiones de 29 m de ancho 43 m de largo y 1.20 m de profundidad, cuenta con 2 generadores de oleaje que tienen una paleta metálica de 10 m de longitud, con movimiento tipo pistón, con motores de 30 KVA de corriente directa, con poca inercia; y se operan con una PC, los generadores de oleaje se pueden mover conjuntamente o independientemente para representar diversas direcciones de oleaje en el tanque de olas.
Tanque de olas menor. Tiene dimensiones de 16.4 m de ancho 40 m de largo y 1.20 m de profundidad, cuenta con un generador de oleaje que tiene una paleta metálica de 10 m de longitud, con movimiento tipo pistón, con motores de 30 KVA de corriente directa, con poca inercia, y se operan con una PC, el generador se puede mover para representar diversas direcciones de oleaje en el tanque.
El tipo de oleaje que se puede generar en estos tanques es monocromático y aleatorio unidireccional, con capacidad de movimiento en varias direcciones de oleaje. Con un tirante de agua de 80 cm es posible generar alturas de la ola de hasta 40 cm., con períodos de ola de hasta 5 seg.
Controlador
de Motor Motor
CD o CA
Elemento de Medición y Procesamiento E de R CD t CD Tornillo o
Mecanismo Pistón o
Paleta
Canal de Oleaje
Figura 1.3 Laboratorio de Hidráulica Marítima
Canal de olas ancho. Tiene dimensiones de 4.9 m de ancho 35 m de largo y 1.20 m de profundidad, cuenta con 1 generador de oleaje que tiene una paleta metálica de 4.90 m de longitud con movimiento tipo pistón, con motores de 30 KVA corriente directa con poca inercia operado por una PC, el generador de oleaje es fijo sólo puede generar oleaje en una sola dirección.
Canal de olas angosto. Tiene dimensiones de 0.6 m de ancho 50 m de largo y 1.20 m de profundidad, cuenta con 1 generador de oleaje que tiene una paleta metálica de 0.60 m de longitud con movimiento tipo pistón, con motores de 30 KVA corriente directa con poca inercia operado por una PC, el generador de oleaje es fijo sólo puede generar oleaje en una sola dirección.
El tipo de oleaje que se puede generar en estos canales es monocromático y aleatorio unidireccional, con valores de alturas de ola y períodos de ola como los indicados en el tanque de olas mayor.
Sensores para la medición de la altura y período de ola. Cuenta con sensores para la medición de la altura y período de ola, son de tipo resistivo, y pueden medir alturas de ola de hasta 10 cm y periodos de hasta 5 seg. Complementariamente, se cuenta con sensores de tipo capacitivo de diferentes longitudes que varían de 20 a 60 cm, y pueden medir alturas de ola de hasta 40 cm y periodos de hasta 5 seg.
la variación del voltaje con respecto a los cambios del nivel de agua. El equipo es el mismo para cada uno de los generadores de oleaje.
Sistema de generación y medición de oleaje. Sistema que se utiliza para generar y medir oleaje en cada uno de los tanques y canales de ola.
1.4.2 Instituto Politécnico Nacional; Escuela Superior de Ingeniería y Arquitectura; Laboratorio de Puertos y Costas
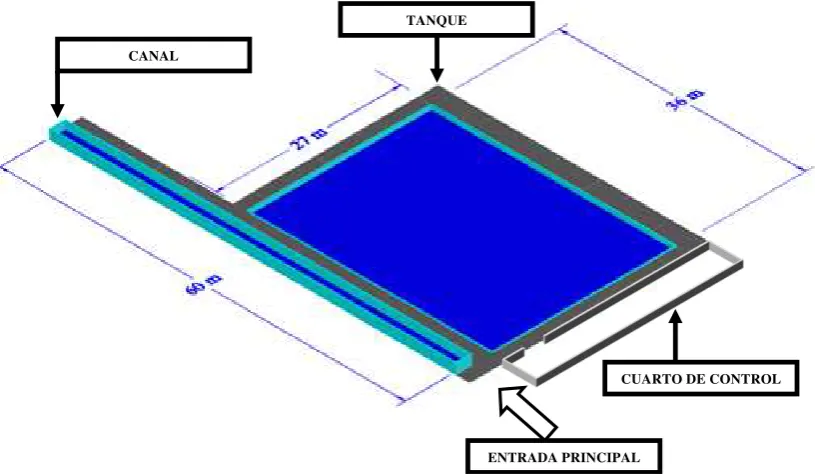
La Escuela Superior de Ingeniería y Arquitectura del Instituto Politécnico Nacional (IPN) cuenta con un generador de olas en aguas poco profundas, único en su tipo en América Latina mostrado en la figura 1.4. [3]
Sus instalaciones cuentan con un tanque y un canal de pruebas. Debido a sus características es posible hacer simulación de oleaje para ver los efectos sobre puertos y desembocadura de ríos.
Además, se realiza modelación con cuerpos de agua, como las lagunas, para conocer los efectos con determinada cantidad de nutrientes, otras investigaciones como observar el comportamiento de resistencia de estructuras mediante el golpeo de las olas.
La maquinaria, es de origen danés, fue adquirida por Petróleos Mexicanos (Pemex) como parte de un proyecto para instalar su propio laboratorio de oleaje, a mediados de los años 80 del siglo pasado y posteriormente donado al Instituto Politécnico Nacional.
1.5 Hipótesis
CAPÍTULO
2
2.1 Controladores de Automatización Programables (PAC’s)
Los controladores PAC’s, término creado por la Corporación de Investigación de Automatización (ARC), lo nombra Controlador de Automatización Programable (PAC) y es utilizado para describir una nueva generación de controladores industriales que combinan las mejores características de la Computadora Personal (PC) (computadora personal), y del Controlador Lógico Programable (PLC). También es utilizado para describir sistemas de control de alto desempeño. [4]
Las aplicaciones actuales de automatización son cada vez más exigentes y poseen nuevas características, entre ellas están las de poder implementar un control avanzado, conectividad de red, integración de subsistemas remotos y distribuidos, interoperabilidad e integración de datos de toda la empresa.
Para que un PLC pueda cumplir estas exigencias, las cuales son tareas más apropiadas para una PC, se les debe adicionar procesadores en paralelo, Gateways y convertidores de red, programas especiales para la comunicación con una PC, etc. Por otro lado, aparecieron soluciones en base a PC’s industriales (IPC); las cuales, si bien cumplen con las exigencias modernas de conectividad e integración, requieren tarjetas o módulos de expansión I/O para poder realizar el control de una maquina o proceso; además se debe cargar en la PC un sistema operativo que permita operar en forma determinística.
La solución típica y obligada para poder cumplir de alguna manera con las exigencias modernas de la automatización, es mediante el empleo del PLC, DCS y PC en forma conjunta; lo cual conllevó al desarrollo del Controlador de Automatización Programable, una solución integral.
El PAC se caracteriza principalmente por su diseño y construcción modular (VGA, Dual USB, Ethernet, RS-232/RS-485), y por el uso de arquitecturas abiertas que permiten la interconexión con otros equipos cumpliendo los siguientes requerimientos:
Trabajan bajo una plataforma única en varios dominios desarrollando funciones lógicas, de conteo, control de movimiento, control de procesos, etc.
Integran estrechamente el hardware del controlador con el software.
Se programan empleando diferentes herramientas de software.
Emplean estándares de facto para las interfaces de red, los lenguajes de programación y protocolos, permitiendo el intercambio de datos dentro de una red de sistemas de varios proveedores.
Proporcionan un procesamiento eficiente de las Entradas y Salidas I/O.
reduce el tiempo de desarrollo e integración. La adquisición de un PAC es a menudo más económica que equipar un PLC con los diferentes módulos para poder tener capacidades similares.
Esta plataforma de control es una tecnología industrial orientada al control automatizado avanzado, al diseño de sistemas sofisticados y a la medición de magnitudes análogas. El PAC se refiere al conjunto formado por un controlador (una CPU típicamente), módulos de entradas y salidas, y uno o múltiples buses de datos que lo interconectan todo. Este controlador combina eficientemente la fiabilidad de control de un autómata o PLC junto a la flexibilidad de monitorización, cálculo y desempeño de una PC.
Los PAC’s pueden utilizarse en el ámbito de la investigación, sobre todo en el
industrial, para el control de máquinas y proceso, A destacar los siguientes: múltiples lazos cerrados de control independientes, lazos de control robusto, adquisición de datos de precisión, análisis matemático y memoria profunda, monitorización remota, visión artificial, control de movimiento y robótica, entre otros. [5]
Se comunican usando los protocolos industriales de red abiertos como TCP/IP u OPC, EtherCAT, Lightbus, PROFIBUS DP / FMS, Interbus, CANopen, Multi-Master, DeviceNet, ControlNet, Modbus, Fipio, CC-Link, SERCOS RS232/RS485, Ethernet TCP / IP, Ethernet / IP, PROFINET, USB, entre otros.
2.1.1 Principales Características de los PAC´s
La Corporación de Investigación de Automatización, identifica las cinco
principales características de los PAC’s: [5]
Funcionalidad de dominios múltiples, al menos dos de lógica, movimiento, control PID, manejadores y procesos en una sola plataforma.
Plataforma de desarrollo simple multidisciplinaria, incorporando etiquetado común y una sola base de datos para acceder a todos los parámetros y funciones.
Herramientas de software que permiten el diseño por flujo de proceso a través de diversas máquinas o unidades de procesos, junto con la norma IEC 61131-3, guía del usuario y administración de datos.
Arquitecturas abiertas, modulares, que reflejen las aplicaciones industriales
a partir de planos de maquinarias en fábricas a operaciones unitarias en plantas de procesos.
Utilización de normas para interfaces de redes, lenguajes, etc., tales como
2.3 Red de Comunicación Industrial EtherNet/IP
EtherNet/IP, abreviatura de “Ethernet™ Industrial Protocol” (Protocolo Industrial
Ethernet), es una solución abierta estándar para la interconexión de redes industriales que aprovecha los medios físicos y los chips de comunicación Ethernet comerciales. Al utilizar la tecnología Ethernet, no sólo se toma una tendencia tecnológica común actualmente, sino que, además, se disfruta de la posibilidad de obtener acceso a datos en el nivel de los dispositivos mediante la Internet. [6]
EtherNet/IP ha sido diseñada para satisfacer la gran demanda de aplicaciones de control compatibles con EtherNet. Esta solución estándar para la interconexión de redes admite la transmisión de mensajes implícita (transmisión de mensajes de E/S en tiempo real) y la transmisión de mensajes explícita (intercambio de mensajes). EtherNet/IP es una red abierta que utiliza tecnología comercial ya existente, como:
El estándar de vínculo físico y de datos IEEE 802.3.
El conjunto de protocolos Ethernet TCP/IP (Protocolo de control de
transmisión/Protocolo Internet), estándar del sector para Ethernet.
Protocolo de control e información (CIP), el protocolo que permite la transmisión de mensajes de E/S en tiempo real e información/transmisión de mensajes entre dispositivos similares.
El Protocolo industrial Ethernet (EtherNet/IP) es un estándar para la interconexión de redes industriales que admite la transmisión de mensajes implícita y explícita, y que utiliza medios físicos y chips de comunicación Ethernet comerciales. Es una red abierta que utiliza:
El estándar de comunicación física y de datos IEEE 802.3
El conjunto de protocolos Ethernet TCP/IP (Protocolo industrial
Ethernet/Protocolo Internet).
El protocolo de control e información (CIP).
El UDP/IP (Protocolo de datagrama de usuario) también se utiliza junto con la red Ethernet. Proporciona un transporte de datos rápido y eficiente, características necesarias para el intercambio de datos en tiempo real.
El protocolo CIP en conjunto con TCP/UDP/IP tiene la finalidad de proporcionar un nivel de aplicaciones común.
EtherNet/IP utiliza el modelo de red de productor/consumidor, al igual que las redes DeviceNet y ControlNet, que también utilizan CIP.
Con la introducción de la tecnología de conmutación de Ethernet y la transmisión de datos full-duplex, se eliminan las colisiones de datos y el rendimiento mejora drásticamente en la red EtherNet/IP.
Por lo general, una red EtherNet/IP utiliza una topología de estrella activa en la que los grupos de dispositivos están conectados punto a punto con un conmutador. La ventaja de una topología en estrella radica en la compatibilidad con productos y que puede combinar dispositivos de 10 y 100 Mbps, y el conmutador Ethernet negociará la velocidad. Asimismo, la topología de estrella le ofrece conexiones fáciles de cablear o de depurar, o en las que resulta fácil detectar fallos y llevar a cabo tareas de mantenimiento.
EtherNet/IP ha sido diseñada para gestionar grandes cantidades de datos de transmisión de mensajes, hasta 1500 bytes por paquete. Permite la gestión de grandes volúmenes de datos de un modo previsible. Además de su capacidad para el tratamiento de datos, la velocidad de EtherNet/IP (10/100 Mbps), facilita aún más la transmisión de información. Gracias a la gran aceptación de la tecnología Ethernet en los últimos años, el costo por nodo de los dispositivos Ethernet está disminuyendo rápidamente. Por todas estas características, EtherNet/IP se está convirtiendo en una opción viable para muchas aplicaciones de control.
2.3.1 Topología de Redes
La forma en la cual las conexiones de una red son hechas se llama topología de red, específicamente al layout físico de la red, las locaciones de los dispositivos y como el cable corre entre ellos. Estos tipos de redes son: [6]
Tipo Bus.
Tipo Estrella.
Tipo Anillo.
Tipo Malla.
2.3.1.1 Topología Tipo Bus
Consiste en un cable con un terminador en cada extremo del que se conectan todos los elementos de una red. Todos los nodos de la red están unidos a este cable. [6]
En esta topología, los elementos que constituyen la red se disponen linealmente, es decir, en serie y conectados por medio de un cable; el bus. Las tramas de información emitidas por un nodo (terminal o servidor) se propagan por todo el bus (en ambas direcciones), alcanzado a todos los demás nodos. Cada nodo de la red se debe encargar de reconocer la información que recorre el bus, para así determinar cuál es la que le corresponde, la destinada a él.
En la figura 2.1 se muestra un ejemplo de la topología tipo bus con cada una de las redes de comunicación industrial: EtherNet/IP, ControlNet y DeviceNet con dispositivos Allen Bradley de Rockwell Automation.
Figura 2.1 Topología Tipo Bus
2.3.1.2 Topología Tipo Estrella
Todos los elementos de la red se encuentran conectados directamente mediante un enlace punto a punto al nodo central de la red, quien se encarga de gestionar las transmisiones de información por toda la estrella. [6]
Se utiliza sobre todo para redes locales. La mayoría de las redes de área local que tienen un enrutador (router), un conmutador (switch) o un concentrador (hub) siguen esta topología.
El nodo central en esta seria el conmutador o el concentrador, por el que pasan todos los paquetes.
En una red de estrella, cada dispositivo necesita solamente un enlace y un puerto de entrada/salida para conectarse a cualquier número de dispositivos. Este factor hace que también sea más fácil de instalar y reconfigurar. Además, es necesario instalar menos cables, y la conexión, desconexión y traslado de dispositivos afecta solamente a una conexión: la que existe entre el dispositivo y el conmutador.
En la figura 2.2 se muestra un ejemplo de la topología estrella mediante la red Ethernet/IP con dispositivos Allen Bradley de Rockwell Automation.
Figura 2.2 Topología Tipo Estrella
2.3.2 Cable Utilizado en las Redes EtherNet
El cable más utilizado para la comunicación de redes EtherNet es el cable UTP (Unshielded Twisted Pair), aunque en un principio se utilizó el coaxial y hoy en día se utiliza también la fibra óptica. [6]
2.3.2.1 Cable UTP
El cable par trenzado sin blindaje (Unshielded Twisted Pair – UTP), son cables
El entrelazado de los cables disminuye la interferencia debido a que el área de bucle entre los cables, la cual determina el acoplamiento eléctrico en la señal, se ve aumentada. En la operación de balanceado de pares, los dos cables suelen llevar señales paralelas y adyacentes (modo diferencial), las cuales son combinadas mediante sustracción en el destino. El ruido de los dos cables se aumenta mutuamente en esta sustracción debido a que ambos cables están expuestos a interferencias electromagnéticas similares.
La tasa de trenzado, usualmente definida en vueltas por metro, forma parte de las especificaciones de un tipo concreto de cable. Cuanto menor es el número de vueltas, menor es la atenuación de la diafonía.
2.3.2.2 Categorías
En la siguiente tabla 2.1 se muestran las categorías del cable UTP. [6]
Tabla 2.1 Categorías Cable UTP
Categoría Ancho de
Banda (MHz)
Aplicaciones
Categoría 1 0.4 Líneas telefónicas y módem de banda ancha.
Categoría 2 --- Cable para conexión de antiguos terminales como IBM 3270
Categoría 3 16 10BASE-T and 100BASE-T EtherNet
Categoría 4 20 16 Mbit/s Token Ring
Categoría 5 100 100BASE-TX y 1000BASE-T EtherNet
Categoría 5e 100 100BASE-TX y 1000BASE-T EtherNet
Categoría 6 250 1000BASE-T EtherNet
Categoría 6e 250 – 500 10GBASE-T EtherNet
Categoría 7 600
Categoría 7a 1,200 Para servicios de telefonía, Televisión por cable y EtherNet
1000BASE-T en el mismo cable
Categoría 8 1,200
2.3.3 Conectores
RJ-45 (registered jack 45) es una interfaz física comúnmente usada para conectar redes de cableado estructurado, (categorías 4, 5, 5e, 6 y 6a). Posee ocho pines o conexiones eléctricas, que normalmente se usan como extremos de cables de par trenzado. Una aplicación común es su uso en cables de red Ethernet, donde suelen usarse 8 pines (4 pares). Otras aplicaciones incluyen terminaciones de teléfonos (4 pines o 2 pares). [6]
2.3.3.1 Cable Directo
Figura 2.3 Tipos de Cable Directo
2.3.3.1 Cable Cruzado
Un cable cruzado es un cable que interconecta todas las señales de salida en un conector con las señales de entrada en el otro conector, y viceversa; permitiendo a dos dispositivos electrónicos conectarse entre sí con una comunicación full duplex. El término se refiere comúnmente al cable cruzado de
Ethernet. También permite transmisión confiable vía conexión Ethernet. Figura
2.4. [6]
Figura 2.4 Cable Cruzado
Para que todos los cables funcionen en cualquier red, se sigue un estándar a la hora de hacer las conexiones. Los dos extremos del cable llevarán un conector RJ45 con los colores en el orden indicado. Existen dos maneras de unir el cable de red con su respectivo terminal RJ45, el pochado se puede hacer de manera manual o al vacío sin aire mediante inyectado de manera industrial. Para usar con un HUB o SWITCH hay dos normas, la más usada es la B, en los dos casos los dos lados del cable son iguales: [6]
Cable directo 568A
Cable directo 568B
Norma A Norma B
1. Blanco Verde 1. Blanco Naranja 2. Verde 2. Naranja 3. Blanco Naranja 3. Blanco Verde
4. Azul 4. Azul 5. Blanco Azul 5. Blanco Azul
6. Naranja 6. Verde 7. Blanco Marrón 7. Blanco Marrón
8. Marrón 8. Marrón
2.3.4 Tarjeta de Red
Una tarjeta de red o adaptador de red permite la comunicación con aparatos conectados entre sí y también permite compartir recursos entre dos o más computadoras (discos duros, CD-ROM, impresoras, etc.). A las tarjetas de red también se les llama NIC (por network interface card; en español "tarjeta de interfaz de red"). Hay diversos tipos de adaptadores en función del tipo de cableado o arquitectura que se utilice en la red, pero actualmente el más común es del tipo Ethernet utilizando una interfaz o conector RJ-45. [6]
Cada tarjeta de red tiene un número de identificación único de 48 bits, en hexadecimal llamado dirección MAC (siglas en inglés de media access control; en español "control de acceso al medio"). Estas direcciones hardware únicas son administradas por el Institute of Electronic and Electrical Engineers (IEEE). [6]
2.3.5 Conmutador o Switch
Un conmutador o Switch es un dispositivo digital de lógica de interconexión de redes de computadores que opera en la capa de enlace de datos del modelo OSI. Su función es interconectar dos o más segmentos de red, de manera similar a los puentes de red, pasando datos de un segmento a otro de acuerdo con la dirección MAC de destino de las tramas en la red. [6]
2.4 Red de Comunicación Industrial DeviceNet
La red de comunicación industrial DeviceNet es una red abierta destinada a la comunicación entre controladores industriales y dispositivos de entradas y salidas (E/S), o I/O. Es desarrollada por la empresa Rockwell Automation como un bus de comunicación abierto y hace su aparición en 1994. Actualmente, la administración del estándar DeviceNet está a cargo de la ODVA, acrónimo de la Open DeviceNet Vendor Association (Asociación de Vendedores DeviceNet Abierto). [7]
La red de campo DeviceNet es una red de comunicación basada en el modelo de referencia ISO/OSI de capas.
Para integrar las diferentes redes de los distintos niveles de automatización en la industria. Se desarrolló el protocolo llamado CIP, Common Industrial Protocol (Protocolo Industrial Común).
El protocolo CIP define las características de las capas de aplicación para diferentes redes lo que ha dado lugar a llamar la “Familia de Redes CIP”. La figura 2.5 muestra la arquitectura de red, de acuerdo al modelo de referencia OSI, para las distintas redes que implementan CIP en sus capas superiores.
Figura 2.5 Familia de Redes CIP
Capa física
Capa de Enlace
Capa de Red y Transporte
CIP
Las capas de aplicación (Sesión, Presentación y Aplicación) son definidas bajo el Volumen 1 de CIP, el cual también ha sido estandarizado como parte del IEC-61158 type 2.
Las capas Física, Enlace, Red y Transporte son definidas bajo el Volumen 3 de CIP, el cual ha sido estandarizado como IEC-62026-3.
El estándar ISO 11898 es la definición del protocolo de comunicación CAN, Controller Area Network (Red de Área de Control). Éste implementa una comunicación serial para dispositivos, y como se representa en la figura 2.6, define completamente la capa de enlace y parcialmente una capa física.
Figura 2.6 DeviceNet en el Contexto de las Estandarizaciones
DeviceNet se compone de tres estándares internacionales. Pero dado que el protocolo CAN (ISO 11898) está contenido dentro del Volumen 3 de CIP, DeviceNet queda totalmente definida por el protocolo CIP en sus Volúmenes 1 y 3, o que es lo mismo que los estándares internacionales IEC 61158 e IEC 62026 respectivamente. Al conjunto de redes de comunicación basadas
en el protocolo CIP es llamado “Familia CIP”. La red DeviceNet fue la primera
Figura 2.7 Familia de Redes CIP
La red DeviceNet se ubica entre los 2 primeros niveles de la jerarquía CIM, es decir, en los niveles de sensor/actuador y campo (y parcialmente en el nivel de control). En forma paralela, como parte de la Arquitectura NetLinx de comunicación de 3 niveles, desarrollada en conformidad al modelo CIM, impulsada por la empresa Rockwell-Automation y otras asociadas a ODVA y a ControlNet International, se ubica en su nivel de dispositivo, es decir, en su nivel 1. Esto es representado en la figura 2.8.
Figura 2.8 Arquitectura NetLinx de Comunicación, para la Integración de Redes Industriales
2.4.1 Características de Funcionamiento
El estándar de comunicación industrial DeviceNet está diseñado como un protocolo de funcionalidad media y bajo coste para el nivel inferior del bus de campo. [7]
La red DeviceNet permite utilizar hasta 64 nodos con una tasa de transmisión media de 125, 250 ó 500 Kbps. Los dispositivos pueden alimentarse a través del bus DeviceNet o disponer de su propia fuente de alimentación. En la tabla 2.2 se enlistan las principales características de la red DeviceNet.
Tabla 2.2 Principales Características de la Red DeviceNet
Característica Descripción
Topología Línea Troncal/Derivaciones
Número de nodos 64
Longitud máxima de red 500m
Energización 24VDC sobre el mismo medio
Tasa de transmisión 125, 250y500 Kbps (según longitud de red)
Método de Acceso al Medio CSMA/NBA (Arbitraje de Bus)
Paquetes de Datos 0 – 8 Bytes
Método de Comunicación Productor/Consumidor (Strobe, Poll, Cambio de estado,
Cíclico)
Arquitectura de Control Centralizada y Distribuida
Otras funciones especiales Reemplazo automático (ADR); detección automática de
velocidad (Autobaud).
Los dispositivos DeviceNet deben cumplir con requisitos de Interoperabilidad e Intercambiabilidad.
La Interoperabilidad se refiere a que todo dispositivo DeviceNet,
independientemente del fabricante, tiene la capacidad de ser configurado para operar dentro de una red DeviceNet.
La Intercambiabilidad se refiere a que todo dispositivo que sigue un mismo
perfil es capaz de ser sustituido por otro, independientemente del fabricante, que cumple con el mismo perfil.
2.4.2 Capa Física
La especificación DeviceNet comprende 2 volúmenes y en el volumen 3 se define la capa física y medio de transmisión para este bus de campo. En DeviceNet es posible la conexión de hasta 64 nodos en una topología de red que consiste en una línea troncal cerrada en ambos extremos con una resistencia de 121 Ω y que permite derivaciones. [7]
2.4.2.1 Topología
En el caso de DeviceNet, ésta define una topología Trunkline-Dropline, o Línea Troncal con Derivaciones, que corresponde al bus de datos principal (Trunkline) de la que se cuelgan las distintas derivaciones (Dropline). En la figura 2.9 se muestra esquemáticamente la topología posible con DeviceNet. [7]
Figura 2.9 Topología Línea-Troncal/Derivaciones de DeviceNet
En la red DeviceNet existe una interdependencia entre la longitud de la red y la tasa de transmisión. Ésta es debida al retardo de propagación de señal. El retardo de propagación de señal es determinado por los 2 nodos que están más alejados el uno del otro dentro del sistema. Es el tiempo que se toma la señal para viajar desde un nodo a otro que sea el más lejano (tomando en cuenta el retardo causado por la transmisión y recepción del nodo), sincronización y la señal desde el segundo nodo que viaja de regreso al primero. Debido a esto, la relación que existe entre la longitud y la tasa de transmisión es inversamente proporcional, es decir, a mayor longitud de red, menor es la tasa de transmisión posible. Además, las longitudes de las derivaciones también afectarán la tasa de transmisión máxima.
La especificación DeviceNet, define 3 velocidades para determinados rangos de longitud de la red. En la tabla 2.3 se muestran las velocidades y longitudes para DeviceNet, según el medio físico con el que se haya implementado.
Tabla 2.3 Tasas de Transmisión Definidas por DeviceNet y Distancias Máximas según el Medio Físico
Tasa de
Transmisión Longitud Línea Troncal Longitud Derivación
Cable
Grueso Delgado Cable Cable Plano KwikLink Máxima Acumulada
125 Kbps 500 m 100 m 420 m 6 m 156 m
250 Kbps 250 m 100 m 200 m 6 m 78 m
2.4.2.2 Cables
La especificación DeviceNet define 3 tipos de cables: [7]
Round-Thick (Redondo Grueso)
Round-Thin (Redondo Delgado)
Flat (Plano).
Round Thick: éste cable es utilizado principalmente para la línea troncal (trunk-line) de la red DeviceNet (también puede ser utilizado para las línea de derivación o drop-line). Posee un diámetro de 12,2 mm (0,48 in). En la figura 2.10 se muestra la construcción física de este cable.
Figura 2.10 Construcción Física del Cable DeviceNet Tipo Round Thick
Los medios Round tienen 5 hilos conductores, mientras que el medio Plano tiene 4. En la tabla 2.4 se muestran los hilos conductores definidos en DeviceNet.
Tabla 2.4 Hilos Conductores Especificados en DeviceNet Color del
Cable Identidad del Cable Uso de Cable Redondo Uso de Cable Plano
Blanco CAN_H Señal señal
Azul CAN_L señal señal
Sin forro tierra blindaje n/a
Negro V- Alimentación 0 VCD Alimentación 0 VCD
Rojo V+ Alimentación +24 VCD Alimentación +24 VCD
2.4.2.3 Conectores
Los conectores DeviceNet incorporan conexión para los 5 hilos conductores definidos anteriormente. Los tipos de conectores definidos por DeviceNet se dividen en dos categorías: [7]
Conectores abiertos.
Conectores sellados.
Conectores abiertos: estos conectores se denominan de esta manera debido a que los pines dejan expuestos los hilos conductores de la red. Dentro de estos conectores se definen los siguientes tipos:
Plug-in.
Fixed.
Plug-in: utilizado para conectar los hilos conductores en un conector removible. Se definen de 5 y 10 pines (2 líneas de 5 pines en paralelo). Las dimensiones de éste conector removible también son definidas en la especificación. En la figura 2.11 se muestra la construcción física de conectores abiertos.
Figura 2.11 Conectores Abiertos Plug-in: (a) 5 Pines; (b) 10 Pines
2.4.2.4 Taps
Los taps son los puntos de la Línea Troncal (trunk-line) que cumplen alguna de las siguientes funciones: [7]
Puntos desde donde se conectan los nodos a la red.
Puntos desde donde se inician las derivaciones (drop-lines).
La especificación DeviceNet define las características físicas de los Taps. Para cada tipo de cable son aplicables distintos tipos de Taps. Los definidos para DeviceNet son los siguientes:
PowerTap.
T-Port.
DeviceBox.
DevicePort.
Taps open-style: o tap de estilo abierto.
PowerTap: Permite la conexión de un fuente de poder de 24VDC para la alimentación de la red y protege contra sobrecorrientes. Se utiliza sólo en medios Round. Se puede observar en la figura 2.12 la construcción física y esquema de conexión de este Tap.
Figura 2.12 PowerTap: (a) Construcción Física; (b) Esquema de Conexión
2.4.2.5 Resistencia de Término
Para que un nodo pueda leer correctamente el nivel del bus es importante evitar las reflexiones de la señal en los extremos del bus. Esto se hace colocando una resistencia de término (TR) en ambos extremos del bus y evitando segmentos de término de bus innecesariamente largos. [7]
La especificación DeviceNet define un valor de 121Ω para la resistencia de
término y debe conectarse una en cada extremo del bus entre CAN_H y CAN_L. DeviceNet define la construcción física de la resistencia de término según el tipo de cable y conector utilizado. La figura 2.13 muestra resistencia conectada sobre un conector abierto.
Troncal
Troncal
Fuente de Alimentación
Eléctrica
Figura 2.13 Conexión de la Resistencia de Termino
2.4.2.6 Fuente de Alimentación
DeviceNet utiliza una fuente de +24VDC y permite la conexión de fuentes redundantes. La alimentación se entrega a los dispositivos a través del mismo bus a través del par de hilos V+ y V-. Además es posible insertar o desconectar nodos sin tener que desconectar la energía de la red. [7]
En la figura 2.14 se muestra la conexión esquemática de una fuente de energía en un medio Round, tanto Thick como Thin. Puede observarse la conexión de la fuente a V+ y V- además de la conexión de la tierra de protección.
2.4.3 Capa de Enlace, Red y Transporte
La capa de enlace está definida por la especificación CAN. [7]
Los dispositivos de una red pueden ser clientes, servidores, productores, consumidores o combinaciones.
Con Deviene, algunas conexiones a clientes o servidores pueden consumir solamente mensajes (serán el destino de mensajes cíclicos o de estado), y algunas conexiones sólo producirán mensajes (serán las fuentes de datos para intercambios cíclicos o de cambio de estado). Este tipo de conexiones (cíclicas o de cambio de estado) reducen los requisitos de ancho de banda.
Por el propio principio de diseño, cada nodo Deviene es responsable de la gestión de sus propios identificadores, eliminando así la necesidad de un gestor de datos centralizado para cada red.
Deviene utiliza una dirección de dispositivo dentro del campo de identificación CAN, lo que proporciona un mecanismo de detección de nodos con direcciones repetidas. Esto presenta la ventaja de poder añadir a quitar nodos sin necesidad de conocer la configuración existente. Como no hay que localizar ningún tipo de registro y los nodos conocen los identificadores en uso, sólo es necesaria una petición de conexión entre los dos elementos de red indicando el tipo.
2.4.3.1 Modos de Comunicación
Cíclico: un elemento produce datos a intervalos fijos y generalmente configurables, lo cual permite aprovechar mejor ancho de banda. [7]
Rolling: Un esclavo recibe los datos según una lista de secuencia definida en el maestro, de duración conocida (depende de parámetros tales como el número de nodos o la velocidad de la red), lo cual proporciona comportamiento determinista de la red.
Cambio de estado: Cualquier dispositivo configurado en esta modalidad, genera un mensaje cada vez que sus datos cambien, o con una cadencia determinada, utilizada también para saber que el dispositivo sigue presente y funcionando.
2.4.3.2 Bus CAN
Recesivo (1 lógico).
Dominante (0 lógico).
Por lo tanto, la transmisión de mensajes CAN y de la competencia por acceso al bus se basa en la habilidad para representar un valor de bit en términos de
“Dominante” y “Recesivo”. Esto debe ser realizado por medios eléctricos.
Una transmisión CAN se compone de dos señales denominadas CAN_H (CAN High o CAN Alto) y CAN_L (CAN Low o CAN Bajo). Éstas se transmiten simultáneamente cada una por un conductor distinto. Éstas operan en modo diferencial, lo que significa que portan voltajes invertidos, para disminuir la interferencia de ruido. Los niveles de voltajes dependen del estándar utilizado. En la figura 2.15 se muestra un esquema que representa esta situación.
Para la representación de un bit “Recesivo” (1 lógico) los niveles de voltaje de
las señales CAN_H y CAN_L es el mismo; y para la representación de un bit
“Dominante” (0 lógico) existe una diferencia de voltaje, VDIFF, en donde el
nivel de voltaje de CAN_H es mayor que el de CAN_L.
DeviceNet utiliza los valores definidos por ISO 11898-2, adaptada en IEC 62026-3, para los niveles de voltaje de estas señales. En la tabla 2.5 se describen los niveles de voltaje definidos por esta especificación.
Figura 2.15 Niveles de Voltajes CAN Utilizados para Representar un Bit Dominante o uno Recesivo
Tabla 2.5 Niveles de Voltaje Definidos para la Señal CAN en DeviceNet
Señal Recesivo Dominante Unidad
Mínim
o Nominal Máximo Mínimo Nominal Máximo
CAN-High 2,0 2,5 3,0 2,75 3,5 4,5 Volt
La figura 2.16 muestra esquemáticamente los valores de voltaje nominal en el bus mencionados en la tabla 6.2.
Figura 2.16 Representación Esquemática de los Valores Nominales de Voltaje de las Señales del Bus CAN Definidos para DeviceNet
2.4.4 Capas Superiores
DeviceNet hace servir el protocolo CIP para las capas superiores (sesión, presentación, aplicación y usuario). [7]
Como el protocolo CIP define una capa de Aplicación común, los datos de las redes basadas en este protocolo no variaran aunque cambien el tipo de red. Al definir los perfiles de los dispositivos, si estos se ciñen al estándar, dos dispositivos que sigan el mismo perfil reaccionaran de manera similar. Gracias a CIP, los mensajes que se generen en una red que haga servir este protocolo, podrán pasar por varias redes sin necesidad de retocar el mensaje en la capa de aplicación. Sólo será necesario indicar la ruta que deberán seguir los datos.
2.4.5 Dispositivos para la Red De Campo DeviceNet
Figura 2.17 Componentes de la Red DeviceNet
Como se observa en la figura anterior, el equipamiento que compone a una red DeviceNet se puede clasificar en las siguientes clases:
Plataforma de Control*
Medio*
Sensores DeviceNet
Software de Configuración*
Interfaz para PC
Dispositivos I/O
Fuente de Poder*
Interfaz de Operador
Partidores
Drives
Motion Control
Dispositivo de Enlace
*Dispositivos imprescindibles.
Una red DeviceNet se compondrá de las clases de dispositivos listadas. Las
2.4.5.1 Plataforma de Control
La plataforma de control para DeviceNet se compone de un Controlador Lógico Programable, o PLC, junto a un módulo de comunicación para soportar comunicación a una red DeviceNet. En la figura 2.18 se muestra un esquema que ilustra una plataforma de control para DeviceNet. [7]
Figura 2.18 Esquema de una Plataforma de Control DeviceNet
Existe una amplia gama de plataformas de control disponibles para DeviceNet, entre las que se pueden nombrar:
CompactLogix
ControlLogix
PLC-5
FlexLogix
SLC 500
2.4.5.2 Herramientas de Software
Las principales herramientas de software para la red DeviceNet son: [7]
RSLogix5000
RSNetworx
RSLinx
RSLogix5000: es la herramienta utilizada en la mantención de la plataforma de control. Este permite realizar las siguientes operaciones:
Desarrollar los programas de aplicación para el PLC en alguno de los siguientes 4 lenguajes: Ladder, texto estructurado, bloque de funciones, carta de funciones secuenciales.
Descargar (Download) los programas desde el disco duro del PC hacia el PLC.
Cargar (Upload) un programa existente en un procesador de la plataforma
de control.
Revisar y modificar los programas de ladder instalados en el procesador.
Forzar entradas y salidas.
Acceder a la configuración y status de operación de todos los módulos conectados al sistema.
Examinar la tabla de datos y las estructuras de datos definidas para la aplicación.
Diagnóstico de fallas del procesador.
La conexión entre el PC en el cual corre el programa RSLogix 5000 y el PLC de la plataforma de control, se efectúa por defecto vía RS-232. Pero, además, ésta se puede efectuar a través de los módulos de comunicación de la plataforma de control, con el soporte del servidor de comunicación RSLinx.
RSNetworx para DeviceNet: Éste software es la herramienta de configuración para una red DeviceNet. Está desarrollado para operar en la plataforma Windows. A través de este, se crea una representación gráfica de la red, agregando y/o quitando dispositivos, y se configuran todos sus parámetros y características. Todos los dispositivos conectados a la red DeviceNet son configurados con RSNetWorx. Entre las características de configuración se pueden destacar:
Nombre y descripción del dispositivo.
Dirección de nodo.
Autobaud.
Estado de falla.
Método de comunicación: strobe, poll, cambio de estado y cíclico.
La comunicación entre el PC en el cual corre el programa RSNetWorx y la red DeviceNet se realiza por los siguientes medios:
Por puerto de red si la plataforma de control posee un módulo de comunicación EtherNet/IP.
Por la conexión de una interfaz de comunicación en el PC anfitrión
del programa RSNetWorx, con lo cual, el PC puede ser configurado como un nodo más en la red. Por último, la conexión entre el programa RSNetWorx y la red DeviceNet es establecida por el servidor de comunicación RSLinx.
RSLinx:es un servidor de comunicación que permite el enlace entre una red de
la familia CIP, y los software de aplicación en entorno Windows. De esta forma, una red DeviceNet es posible ser configurada por RSNetWorx, así como su plataforma de control por RSLogix, dado que el software RSLinx opera para soportar la comunicación.
Entre otras funcionalidades que entrega este programa, se pueden mencionar: Como servidor de comunicación, establece la comunicación entre la red y los programas RSLogix5000 y RSNetWorx.
Cargar (Upload) un programa en lenguaje Ladder desde un PLC y modificarlo. Navegar por los dispositivos de la red y monitorear su estado.
En programa RSLinx opera automáticamente desde los programas de configuración para la red DeviceNet, RSLogix 5000 y RSNetWorx.
Integrated Architecture Builder: Este software es una herramienta para el
diseño de redes que implementan el protocolo CIP, es decir, DeviceNet, ControlNet y EtherNet/IP. A través de esta herramienta es posible diseñar una red DeviceNet, tomando en cuenta el medio, los dispositivos y otros factores asociados. El programa Architecture Builder permite además la generación de informes y listas de cotización.
2.4.5.3 Dispositivos de Entradas/Salidas o I/O Device
Los Dispositivos de entradas/salidas, o I/O Device, son dispositivos que permiten conectar a la red DeviceNet, dispositivos de entrada salida, tales como sensores y actuadores, de tipo estándar. Un I/O Device es considerado un nodo dentro de la red, por lo cual debe asignársele una dirección de red. A través de este se conectan varios puntos I/O. [7]
2.4.5.4 Interfaz de Operador
Las interfaces de operador entregan al usuario la capacidad de monitorear el proceso en forma visual a través de indicadores o pantallas que entregan información de lo que está ocurriendo en la planta. Estas pueden ser simples luces indicadores o completos diagramas del proceso plasmados en monitores adaptados para las condiciones industriales. Las interfaces de operador son llamadas también Interfaces Humano Máquina, o HMI (Human- Interface-Machine). [7]
Las interfaces de operador DeviceNet tienen la capacidad de conectarse directamente a la red y deben ser configurados como un nodo más en la red.
2.4.5.5 Configuración de los Dispositivos DeviceNet
CAPÍTULO