ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y
ELÉCTRICA
UσIDAD PRτFESIτσAL “ADτLFτ LÓPEZ MATEτS”
INGENIERÍA EN COMUNICACIONES Y ELECTRÓNICA
“
IMPLEMENTACIÓN DE MODELOS DE RUIDO BLANCO POR
MEDIO DE UN GENERADOR DE SEÑALES ARBITRARIAS
”
TESIS
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRONICA
PRESENTAN:
Abraham Graniel Roman
Alfonso Jiménez Rojo
Jorge Nuñez López
ASESORES:
M. en C. Eric Gómez Gómez
M. en C. José Ernesto Rojas Lima
M. en C. Pedro Gustavo Magaña del Río
Dedicatorias
A mis padres Raquel y Armando
p
or brindarme siempre su apoyo
incondicional, por luchar por mí, por cada uno de los sacrificios que tuvieron
que hacer para que yo cumpliera mi sueño, por sus enseñanzas, su amor y
paciencia, por haber sembrado en mí el deseo de superación constante y
enseñarme a conducirme con rectitud y honradez en mi vida.
No los defraudaré y haré que siempre se sientan orgullosos de mí, de lo que
ustedes han forjado.
Queridos padres Dios los bendiga y acompañe siempre;
Gracias.
A mis hermanos:
Por siempre estar a mi lado apoyándome, brindándome
consejos y enseñanzas
;
Muchas gracias
queridos hermanos.
A Dios
, te agradezco me hayas dado vida, salud, fortaleza, bendiciones y fe
para enfrentar cada uno de los obstáculos que encontré en mi camino, así como
la oportunidad de disfrutar y compartir con mi familia y amigos estos
momentos tan felices e inigualables en mi vida.
Dedicatorias
A mis padres
Beatriz
y
Alfonzo
por
brindarme el apoyo incondicional para
llegar hasta aquí, por sus enseñanzas y
educación que me dieron, por hacer de
mí
una
persona
productiva,
independiente y feliz.
Gracias
A mi
hermana Claudia
,que con la
diferencia de un año, siempre ha estado
apoyándome y deseándome lo mejor, porque
ha sido y es mi primer y más querida amiga.
Gracias
A
todos mis amigos
,han sido una parte muy importante en mi vida en cada
momento y en cada lugar, siempre creyeron en mí. Gracias
A
toda mi familia
por alentarme siempre a continuar superándome. Gracias
A los
profesores
que a lo largo de mi vida han forjado en mi a un
profesionista, Gracias.
Dedicatorias
A mis padres
Josefina
y
Ángel
por
brindarme
la oportunidad de una educación
como la que me dieron, por el apoyo
incondicional en los momento mas difíciles de
mi vida al igual de los más felices de ella, por
luchar a mi lado en esta cuesta, por su amor,
comprensión y afecto, por ser como son, por
amarme y comprenderme, por ser lo mas
importante en mi vida;
Gracias.
A
Gabriela, Nayely, José Antonio,
Felipe, Margarita, Verónica
,que en la
recta final de mi formación académica
estuvieron y me apoyaron; Gracias
.A
Lizbeth Abigail
,por ser la persona que me impulsó de manera
incondicional al final de mi educación; Gracias.
A
todas las personas que creyeron en mí
y estuvieron cuando más lo
necesite; Gracias.
A todos y cada uno de los
profesores
que me formaron a lo largo de mi vida, y
a los que dejaron huella en mi formación; Gracias.
Agradecimientos
Al
INSTITUTO POLITECNICO NACIONAL y la Escuela Superior de
Ingeniería Mecánica y Eléctrica,
por haber proporcionado los medios de
nuestra formación académica, moral y profesional.
A
nuestro profesor
,
asesor y amigo
Pedro Gustavo Magaña del Río
por
formar parte de este logro con sus consejos, pláticas y enseñanzas que me
hicieron crecer como persona y como profesional.
A nuestros asesores:
M. en C. Eric Gómez Gómez
M. en C. José Ernesto Rojas Lima
A nuestros sinodales:
Ing. Francisco Hernández Rangel
Ing. Cecilio Rojas Espejo
I ple e ta ió de
modelos de ruido
blanco por medio de
un generador de
O B J E T I V O
“Integrar
experimentalmente una aplicación para la generación de
Índice
INTRODUCCIÓN XIV
ANTECEDENTES XVI
Capítulo 1: Elementos de la Teoría de la Probabilidad y Variables
Aleatorias
1.1 Introducción a la Probabilidad 2
1.1.1 Experimentos aleatorios 2
1.1.2 Espacio Muestra y Eventos 2
1.1.3 Axiomas de Probabilidad y cálculo de probabilidad de eventos 5
1.2 Variables Aleatorias 7
1.2.1 Definición y clasificación 7
1.2.2 Función de distribución 9
1.2.3 Función de densidad de probabilidad 12
1.2.4 Función de masa de probabilidad 14
1.2.5 Función de variables aleatorias 17
1.3 Promedios Estadísticos 18
1.3.1 Momento de una variable aleatoria 18
1.3.2 Esperanza 20
1.3.3 Varianza 21
1.4 Ejemplos de variables aleatorias 23
1.4.1 Variable aleatoria Uniforme 23
1.4.2 Variable aleatoria Gaussiana 26
1.4.3 Binomial 29
1.4.4 Poisson 33
Capítulo 2: Procesos aleatorios 2.1 Introducción 38
2.2 Proceso aleatorio 39
2.2.1 Definición matemática de un proceso aleatorio 40
2.3 Procesos estacionarios 42
2.4 Estadísticas de procesos aleatorios 44
2.4.1 Media 44
2.4.2 Auto correlación 45
2.4.3 Correlación 48
2.5 Procesos Ergódicos 49
2.6 Trasmisión de un proceso aleatorio a través de un filtro lineal invariante con el tiempo 52
2.7 Densidad Espectral de Potencia 55
Capítulo 3: Tipos de ruido y técnicas para generar números aleatorios
3.1 Ruido en los sistemas de comunicaciones 59
3.1.1 Ruido de Disparo 59
3.1.2 Ruido Térmico 61
3.1.3 Ruido Blanco 65
3.2 Generación de números aleatorios 67
3.2.1 Propiedades de los números aleatorios 67
3.2.2 Generación de números pseudo-aleatorios 68
3.2.3 Técnicas de generación de números aleatorios 70
3.2.4 Generación de variables aleatorias 73
3.2.5 Transformación directa para la distribución normal y lognormal 76
3.2.6 Histogramas 78
Capítulo 4: Realización Práctica 4.1 Generador de señales 81
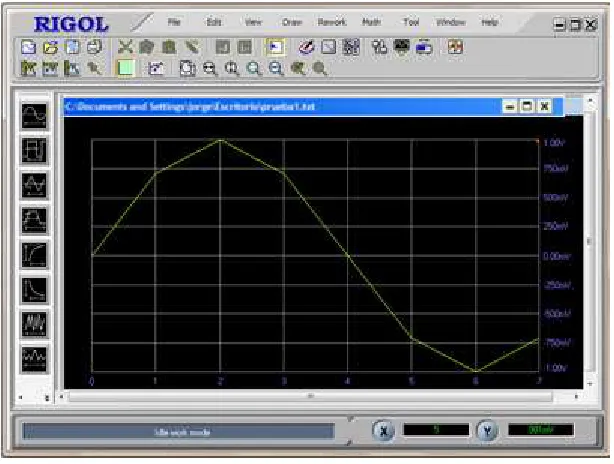
4.1.1 Formas de onda 85
4.1.2 Software 88
4.2 Interacción con el software y el generador 89
4.2.1 Generación de ondas arbitrarias 89
4.2.2 Localidades de memoria 95
4.2.3 Generación de archivos y cabeceras 98
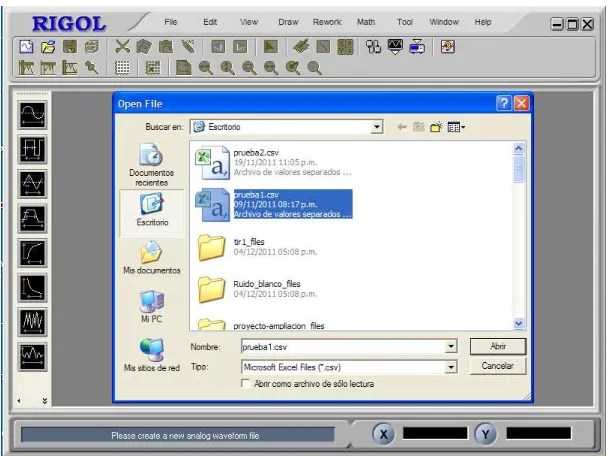
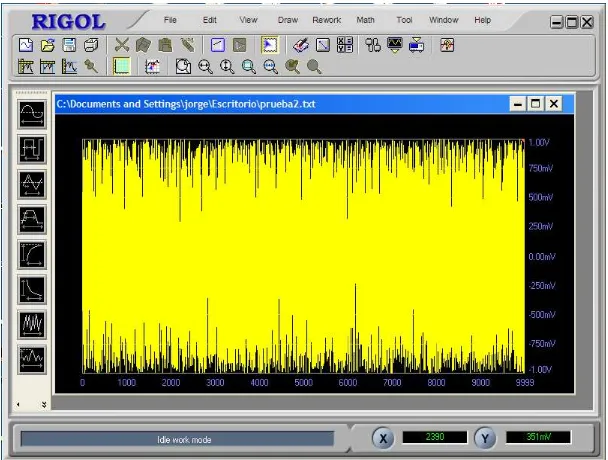
4.2.4 Generación de señales a través de los archivos “.txt y .csv” 102
4.3 Análisis experimental del ruido del generador 107
4.3.2 Pruebas estadísticas 110
4.4 Generación de Ruido Blanco Gaussiano 113
4.4.1 Generación del ruido por medio del MATLAB e intercalación 114
4.4.2 Generación de ruido por medio de una interfaz gráfica (MATLAB) 119
4.4.3 Interfaz Gráfica, generación de archivo “.txt ” de autocorrelación y ruido 123
4.5 Resultados de la interfaz Gráfica 127
Conclusiones 137
Anexos Anexo 1 Hoja de especificaciones del generador DG2041A 139
Anexo 2 Código de programación en MATLAB 149
Glosario 151
INTRODUCCIÓN
El ruido se define como una señal ajena que está presente en un sistema, en el ámbito de las comunicaciones es de gran interés analizarlo y si es posible reducirlo, con lo cual se obtiene un mejor desempeño y una mayor confiabilidad en los sistemas de comunicaciones.
Esta señal no deseada se puede generar por diversas causas, como pueden ser: los componentes electrónicos de los propios sistemas, el hombre e incluso algunas causas propias de la naturaleza. La señal puede volver erróneos y no confiables los resultados que se esperan de un determinado sistema, si es excesivo, el ruido, provoca una comunicación nada confiable, lo que puede desencadenar que se considerare al sistema como no funcional, no confiable o simplemente no operable.
El ruido es una señal aleatoria, es decir que no se sabe el valor próximo que tomará, aunque se hacen muchas aproximaciones y simulaciones de éste, aun es imposible saber su valor siguiente. El ruido es un parámetro muy importante y de gran relevancia que se debe de tomar en cuenta para el diseño, la fabricación, la implementación y el análisis de un determinado sistema de comunicaciones.
Al estudiar este fenómeno se ha comprobado que se considera como inherente e impredecible (aleatorio). Debido a que es imposible eliminarlo, los sistemas han ido mejorando, lo único que ha conseguido es reducirlo, esta reducción se realiza por medio de filtros, transmisores y receptores que cuentan con componentes de mayor calidad que contribuyen a tener una mejor calidad de la señal.
Por lo anterior, es interesante y muy conveniente poder tener generadores de ruido en las carreras especializadas en comunicaciones, con lo cual se pueden realizar pruebas modificando los parámetros y haciendo interaccionar con los diferentes sistemas disponibles en los laboratorios; Al poder modificar ciertos parámetros y lograr que los sistemas se comporten lo más cercano a lo que uno desea, se obtienen múltiples beneficios, como el aprovechamiento, la comprensión y el aprendizaje en general es mucho mayor y de mejor calidad.
ANTECEDENTES
Las instituciones de educación superior en las universidades públicas de nuestro país se caracterizan por la alta dependencia de los presupuestos para el equipamiento necesario de los laboratorios existentes, más aun tratándose de alta especialización técnica, por lo que es sumamente común que se utilicen al máximo los recursos existentes para la impartición práctica de las materias que en los planes de estudio que así lo indiquen.
Adicionalmente a los conocimientos teóricos requeridos para la ejecución de las prácticas, se debe tener consistencia con la capacidad de los equipos que se utilizarán. Debido a esta importancia surge la necesidad de hacer un reconocimiento de los equipos con los que cuenta el laboratorio de comunicaciones de la Escuela Superior de Ingeniería Mecánica y Eléctrica unidad Zacatenco del Instituto Politécnico Nacional.
En dicho reconocimiento, existen aplicaciones y herramientas que en ocasiones se desconocen y que en realidad son de gran importancia para comprender, facilitar y desarrollar prácticas que permitan reforzar e incluso ampliar los conocimientos teóricos adquiridos previamente en las aulas de estudio.
Sin embargo, dentro del reconocimiento hay algunas limitantes físicas y lógicas que estos equipos pueden llegar tener, estas limitantes permiten hacer especulaciones y abren un panorama distinto sobre los experimentos y prácticas que se realizan, incluso llevan a pensar “¿qué pasaría si hiciera…..?” ó “¿qué pasaría si tuviera….?” Debido a esto, se ha despertado un gran interés en diversos integrantes de la institución tal es el caso de los jefes de laboratorio, profesores, técnicos auxiliares y alumnos por contribuir al mejor aprovechamiento y a extender la funcionalidad de los equipos existentes en las instalaciones de los laboratorios.
C
APÍTULO 1
|
“Elementos
de la teoría de la
1.1 Introducción a la Probabilidad
En la teoría de las comunicaciones encontramos muy seguido la palabra aleatorio,
que tiene como significado impredecible. Por tal motivo es muy importante su análisis en las comunicaciones, debido a que el mensaje no se conoce de antemano o lo que es lo mismo no es determinístico. Si el receptor, en un sistema de comunicaciones, tuviera la certeza de lo que se le envía, no habría necesidad de la comunicación.
Entonces, los mensajes que se envían desde el transmisor, son mensajes aleatorios, además, la señal transmitida siempre va acompañada por ruido que introduce el sistema, este ruido son perturbaciones impredecibles. Basándose en análisis y experimentación se pueden encontrar ciertas regularidades en los procesos aleatorios que permitan describirlos de una manera probabilística, con esta herramienta seremos capaces de analizar el efecto del ruido en los sistemas de comunicaciones y con ello la calidad del mensaje que el receptor recibe.
1.1.1 Experimentos aleatorios
En probabilidad, cualquier proceso de observación es referido como experimento. El
resultado de una observación se denomina salidas del experimento. Un experimento
es llamado experimento aleatorio si sus salidas no pueden ser predecibles. Algunos
ejemplos que se presentan de manera común:
Por mencionar algunos ejemplos tenemos el lanzamiento de un dado, los sorteos, urnas, etc. Donde en cada uno de estos influyen distintos factores que repercuten directamente en el resultado (si el dado tiene imperfecciones, si los sorteos se realizan de manera legal, etc.).
1.1.2 Espacio Muestra y eventos
El conjunto de todas las posibles resultados de un experimento aleatorio es llamado
espacio muestra S. Un punto en S es llamado punto muestra. Cada resultado de un
Espacio muestra discreto: Se dice que un espacio muestral, es discreto si su resultado puede ponerse en una relación uno a uno con el conjunto de los enteros positivos, en otras palabras es un suceso finito o infinito numerable, es decir acotado, ejemplo: El sacar una carta de una baraja de 52 cartas.
Espacio muestra continuo: Se dice que un espacio muestral, es continuo sí sus resultados son un intervalo de números reales, en otras palabras son espacios donde el número de sucesos son infinitos e incontables, ejemplo: El clima, un temblor, terremotos, etc.
Definamos un conjunto A que puede ser llamado subconjunto de B, denotado por A ∈B si todos los elementos de A son también elementos de B (Fig.1.1.1). Cualquier
subconjunto del espacio muestra S es llamado evento. Los miembros de este
conjunto tienen una característica común.
Fig.1.1.1 Conjunto A que es subconjunto de B donde todos los elementos del conjunto A pertenecen de igual manera al conjunto B
Por características comunes debe entenderse que únicamente un grupo de resultados en particular satisface la característica. Se dice que ha ocurrido un evento si los resultados del experimento aleatorio incluyen a algunos de los que definen al evento. En este contexto, el espacio muestral, evento en sí mismo, puede entenderse como un evento seguro, puesto que se tiene un 100% de certidumbre de que ocurriera un resultado del espacio muestral cuando el experimento se lleva a cabo.
Para completar se dan las siguientes definiciones.
1.- El evento que contiene a ningún resultado del espacio muestral recibe el nombre de evento nulo o vacío.
2.- El evento formado por todos los posibles resultados en E1 o E2 o en ambos, recibe el nombre de la unión de E1 y E2 y se denota por . Ejemplo Fig. 1.1.2 dónde:
Fig. 1.1.2 Conjunto A que equivale al conjunto que tiene unión al conjunto B que corresponde al conjunto
3.- El evento formado por todos los resultados comunes tanto E1 como a E2 recibe el nombre de intersección de E1 y E2 y se denota por . Ejemplo Fig. 1.1.3 dónde:
4.- Se dice que los eventos E1 y E2 son mutuamente excluyentes o disjuntos si no tienen resultados en común; en otras palabras , dónde:
5.- Si cualquier resultado de E2 también es un resultado de E1, se dice que el evento E2 está contenido en E1, y denota por
6.- El complemento de un evento E con respecto al espacio muestral S, es aquel que
tiene a todos los resultados de S que no se encontraba en E, y se denota por ̅
̅ ̅
Dónde
̅
1.1.3 Axiomas de Probabilidad y cálculo de probabilidad de eventos
Al realizar una asignación de números reales a los eventos definidos en S se le
conoce como la probabilidad.
En la definición de axioma, la probabilidad de del evento E es un número real
asignado a E que satisface los siguientes tres axiomas:
Axioma 1:
En el anterior axioma lo que se busca es que se trabaje con números no negativos
Axioma 2:
1.2
Este axioma reconoce que el propio espacio muestra es un suceso, y dado que es un suceso que contiene todos, este debería tener la probabilidad más alta posible, en este caso la unidad, por ello S se conoce como el suceso o evento seguro.
Axioma 3:
P ( ) = P ( ) + P ( ) si ∩ = 1.3
Recordar que
El axioma establece como la probabilidad del suceso “definido” como la unión de
cualquier número de sucesos mutuamente excluyentes es igual a la suma de la probabilidad de cada suceso.
La razón de estos tres axiomas se convierte en aparente cuando, por ejemplo, se recuerda la interpretación de la probabilidad como una frecuencia relativa, es decir, la probabilidad de un evento refleja la proporción de veces en que ocurrirá cuando el experimento se repite, esta se obtiene dividiendo la frecuencia absoluta (es el número de veces que aparece un valor en el estudio) del evento o suceso, entre el número de veces que se realizó el experimento.
La frecuencia relativa se puede definir a través de un límite donde el número de sucesos totales tiende a infinito, donde este límite evalúa el número de ocasiones que se ha presentado un evento particular sobre el número total de eventos
Donde:
nA =Número de eventos particulares
n= Número de eventos totales
Un ejemplo de frecuencia relativa:
Se lanza un dado 50 veces, en el experimento el número 5 sale 8 veces, calcular la frecuencia relativa de dicho evento. Frecuencia Relativa = 8/50=0.16
Donde 8 es número de veces que ocurre el suceso y el 50 es el número de veces que se repite el experimento.
Los axiomas también son evidentes para la interpretación subjetiva de la probabilidad, dado que para este cualquier grado de creencia se convierte en una proporción. De ahí que la probabilidad exhiban las características de las proporciones, en las que la probabilidad es un número entero entre cero y uno, y dado que es forzoso que ocurra un resultado cuando se lleva a efecto un experimento, la probabilidad de S es uno.
1.2 Variables Aleatorias
1.2.1 Definición y clasificación
Considere un experimento aleatorio con espacio muestra S. Una Variable aleatoria X(λ) es una función que asigna un número real llamado valor de X(λ) a cada punto muestra λ de S. Usamos la letra X para esta función en vez de X(λ) y usamos v.a.
para denotar la variable aleatoria. Ejemplo: Fig. 1.2.1
Se dice que X es aleatoria porque involucra la probabilidad de los resultados del espacio muestral, y X es una función definida sobre el espacio muestral, de manera que trasforma todos los posibles resultados del espacio muestral en cantidades numéricas.
Esta variable aleatoria la podemos considerar como una función que aplica para todos los elementos del espacio muestral S, a puntos del eje real o solo para
algunas partes de él.
El espacio muestra S es llamado el dominio de la v.a. X, y la colección de todos los
números es llamado el rango de la v.a. X. Nótese que dos o más puntos muestra
diferentes pueden dar el mismo valor de X (λ) (Fig. 1.2.2) pero dos diferentes números en el rango no pueden ser asignados a el mismo punto muestra (Fig.1.2.3).
Fig. 1.2.2. Dos puntos muestra en el mismo valor de “x”
Fig. 1.2.3. Un punto muestra no se presenta en dos valores de “x”
Si X puede tomar solo un número contable de valores distintos, entonces X es
llamado variable aleatoria discreta, sin embargo un espacio muestral puede ser
discreto, continuo, o incluso una mezcla de puntos discretos y continuos.
Si X puede asumir cualquier valor dentro de uno o más intervalos del eje real,
entonces X es llamada variable aleatoria continua. El número de llamadas telefónicas
que llegan a una oficina en un tiempo finito es un ejemplo de una variable aleatoria discreta, y el tiempo exacto en que llega la llamada es un ejemplo de una variable aleatoria continua.
1.2.2 Función de distribución acumulativa (continuo y discreto)
Para el caso continuo, al considerar los valores de una variable aleatoria es posible desarrollar una función matemática que asigne una probabilidad a cada realización x de la variable aleatoria X. Esta función recibe el nombre de función de probabilidad de la variable aleatoria X. El término más general, distribución de probabilidad, se refiere a la colección de valores de la variable aleatoria y a la distribución de probabilidad entre estos. La función de distribución [o función de distribución acumulativa de X es la función definida por:
1.5
La función de distribución es igual a la probabilidad de que una variable aleatoria discreta X sea menor o igual a un valor x, donde
Algunas propiedades específicas de la función de distribución son las siguientes:
Cuando el límite de la función de distribución tiende al infinito negativo tiene un valor cero
Cuando el límite de la función de distribución tiende al infinito positivo tiene un valor uno
1.5b La función de distribución depende directamente de la variable aleatoria, si una variable aleatoria adquiere un valor mayor a otra variable aleatoria, su función de distribución también será mayor
1.5c
Para representar estas propiedades observar la siguiente gráfica (Fig.1.2.4)
Fig1.2.4. Propiedades de la función de distribución
De la ecuación 1.5 podemos calcular otras probabilidades
1.6
La función de distribución acumulativa de una v.a. continua X, la cual nos ayuda a conocer la función de densidad de probabilidad puede ser obtenida por la siguiente expresión:
∫ - 1.8
Donde es una variable aleatoria auxiliar y donde ≤
En la siguiente gráfica (Fig. 1.2.5) se puede observar la expresión gráfica de la ecuación 1.8
Para el caso discreto la función de distribución acumulativa de una v.a. discreta X puede ser ejemplificada por la figura 1.2.6
Figura 1.2.6. La función de distribución acumulativa de una v.a. discreta
1.2.3 Función de densidad de probabilidad
La distribución de probabilidad de una variable aleatoria continua X está caracterizada por una función que recibe el nombre de función de densidad de probabilidad. Esta función no es la misma función de probabilidad que para el caso discreto.
La probabilidad de que una variable aleatoria continua X tome un valor específico x es cero.
Es por esto que la función de densidad de probabilidad sirve como medio para determinar la probabilidad de un intervalo
P ( ) 1.9a
La función de densidad de probabilidad se define como la derivada de la función de distribución (Ecuación 1.8);
(x)=
1.10 Las propiedades de (x):
La función de densidad de probabilidad no es negativa
1.11
La integración de todos los valores de la función de densidad de probabilidad da como resultado la unidad
∫ 1.12
Se puede evaluar la función en un cierto intervalo con una integración de dicho intervalo
En la siguiente gráfica se ilustran las propiedades de la función de densidad de probabilidad (Fig. 1.2.7).
Fig. 1.2.7 Propiedades de la función de densidad de probabilidad
1.2.4 Función de masa de probabilidad
La distribución de probabilidad o función de masa de probabilidad (fmp) de una variable discreta para cada número x se puede definir como:
1.14
Para cada valor posible x; de la variable aleatoria, la función masa de probabilidad especifica la probabilidad de observar dicho valor cuando se realiza el experimento. Cualquier función masa de probabilidad requiere las siguientes condiciones:
1.- La probabilidad es mayor acero:
2.- La suma de todas las posibles da como resultado uno:
∑
Ejemplo: Considere un grupo de cinco donadores de sangre potenciales, a, b, c, d y e, de los cuales solo a y b tienen sangre tipo O+. Se determinará en orden aleatorio el tipo de sangre con cinco muestras, una de cada individuo hasta que se identifique un individuo O+. Sea la variable aleatoria Y= el número de exámenes de sangre para identificar un individuo P+.
Entonces la función masa de probabilidad de Y es:
|
( ) ( ) ( )
( ) ( ) ( )
Tabulada la función de masa de probabilidad es:
Y 1 2 3 4
P(y) 0.4 0.3 0.2 0.1
Tabla 1 Valores de la variable aleatoria Y y sus probabilidades
Donde cualquier valor de Y que no aparece en la tabla 1 recibe cero de probabilidad.
La figura 1.2.7 muestra una gráfica lineal de la función de masa de probabilidad.
1.2.5 Función de variables aleatorias
Sea X una variable aleatoria de la que conocemos su distribución de probabilidad.
Nos interesa estudiar una función:
1.15
Dependiendo del tipo de variable aleatoria que sea X, así es Y. Si X es discreta, Y es
discreta. Si X es continua, Y puede ser discreta o continua.
Se puede expresar la función de distribución de la v.a .
Se busca determinar la densidad de en términos de la densidad de x, para
ello se utilizara el siguiente teorema fundamental:
Para encontrar una para una “y” especifica, se resuelve la ecuación
Denotando las raíces reales para
1.16
Se puede observar que
| | | | 1.17 Donde
1.3 Promedios Estadísticos
1.3.1 Momentos de una variable aleatoria
Los momentos de una variable aleatoria X son los valores esperados de ciertas
funciones de X.
Esto forma una colección de medidas descriptivas que pueden emplearse para caracterizar la distribución de probabilidad de X y especificarlas si todos los
momentos de X son conocidos. A pesar de que los momentos de X pueden definirse
alrededor de cualquier punto de referencia, generalmente se definen alrededor del cero o del valor esperado de X.
Definición 1: Sea X una variable aleatoria. El r-ésimo momento de X alrededor del
cero se define por:
∑ 1.18
∫ 1.19
El primer momento alrededor del cero es la media o valor esperado de la variable aleatoria y se denota por µ; de esta manera se tiene que La media de una variable aleatoria se considera como una cantidad numérica alrededor de la cual los valores de la variable aleatoria tienden a agruparse. Por lo tanto, la media es una medida de tendencia central.
Definicion2: Sea X una variable aleatoria. El r-ésima momento de X o el r-ésimo
momento respecto a la media de X se define por:
∑
El momento central cero de cualquier variable aleatoria es uno, dado que:
1.22
De manera similar, el primer momento central de cualquier variable aleatoria es cero, dado que:
1.23
El segundo momento central:
1.24
Recibe el nombre de varianza de la variable aleatoria. Puesto que:
1.3.2 Esperanza
El valor promedio de una variable aleatoria después de un número grande de experimentos, es su valor esperado.
El valor esperado de una variable aleatoria X es el promedio o valor medio de X y
está dado por:
∑ 1.26
∫ 1.27
En donde y son las funciones masa de probabilidad y de densidad de probabilidad, respectivamente.
En general, el valor esperado de una función g(X) de la variable aleatoria X, está
dado por
∑ 1.28
∫ 1.29
La esperanza de una variable aleatoria X no es una función de X sino un número fijo
y una propiedad de la distribución de probabilidad de X.
1.3.3 Varianza
La varianza de cualquier variable aleatoria es el segundo momento alrededor del
origen menos el cuadrado de la media. Generalmente se denota por “ 2 o Var(X)”.
La varianza de una variable aleatoria es una medida de la dispersión de la distribución de probabilidad de ésta.
1.30
Así
∑
∫
1.3.4 Covarianza y coeficiente de Correlación
El (k, m)–ésimo momento de una v.a. bidimensional (X, Y) está definido por
∑ ∑ ( ) 1.31
El (1, 1) momento de (X, Y)
1.33 Es llamado la correlación de X y Y. Si E(X Y) = 0, entonces decimos que X y Y son ortogonales. La covarianza de X y Y, denotada por Cov (X, Y)o XY, es definida por:
1.34 Expandiéndola, obtenemos
1.35
Si Cov(X) = 0, Entonces decimos que X y Y son no correlacionadas. De la ecuación
anterior vemos que X y Y son no correlacionadas si
1.36
Note que si X y Y son independientes, entonces se puede observar que son no
correlacionadas.
El coeficiente de correlación, denotado por o se define por
1.4 Ejemplos de variables aleatorias
1.4.1 Variable Aleatoria Uniforme.
Supongamos que ocurre un evento en que una variable aleatoria toma valores de un intervalo finito, de manera que estos se encuentran distribuidos igualmente sobre el intervalo. Esto es, la probabilidad de que la variable aleatoria tome un valor en cada subintervalo de igual longitud es la misma. Se dice entonces que la variable aleatoria se encuentra distribuida uniformemente sobre el intervalo.
Definición 1: Se dice que una variable aleatoria X está distribuida uniformemente
sobre el intervalo si su función de densidad de probabilidad está dada por:
{
1.38
La función de densidad de probabilidad de una distribución uniforme es constante en el intervalo , como se ilustra en la figura 1.4.1; Por esto, tal distribución también se conoce como distribución rectangular.
La función de distribución acumulativa se determina por:
∫ 1.39
1.40
Se sigue entonces que, para cualquier subintervalo interior :
1.41
Gráficamente se representa a la distribución acumulativa en la figura 1.4.2:
Esto nos ilustra que la probabilidad de que X tome valores del subintervalo
es
por la longitud del subintervalo y, de esta forma, igual a la probabilidad de que X tome valores en cualquier otro subintervalo de la misma longitud.
La distribución uniforme proporciona una representación adecuada para redondear las diferencias que surgen al medir cantidades físicas entre los valores observados y los reales.
Ejemplo
Sea X un número aleatorio entre 0 y 5. Entonces X tiene una distribución uniforme dada por
Por lo tanto
1.4.2 Variable aleatoria Gaussiana
Se dice que una variable aleatoria X es de tipo Gaussiana si su función de densidad
tiene la siguiente forma:
√
1.42
Donde es la varianza y es la media.
Esta función se ha dibujado en la figura 1.4.3:
Figura 1.4.3 La función de densidad de una variable aleatoria gaussiana
Su valor máximo √ se produce en . Su amplitud alrededor del punto
está relacionada con . La función decrece a 0.607 veces su máximo en
La densidad Gaussiana es la más importante de todas las densidades y se emplea prácticamente en todas las áreas de las ciencias y de la ingeniería.
Esta importancia radica en que permite describir de forma precisa muchas magnitudes importantes del mundo real, especialmente cuando dichas magnitudes son el resultado de muchos pequeños efectos aleatorios, que se combinan para crear la magnitud de interés.
La función de distribución es:
√ ∫
1.44
Esta integral no tiene una solución cerrada conocida y debe evaluarse por métodos numéricos o aproximaciones.
El caso normalizado donde , se obtiene la función de distribución correspondiente por . A partir de (1.44), es:
√ ∫
1.45 Que es una función solo de x, para un valor negativo de x se usa la relación:
Para demostrar que la función de distribución general de (1.33) puede expresarse en términos de la función dada por (1.34), hacemos el cambio de variable:
1.47
En 1.47 y obtenemos:
√ ∫
1.48 A partir de (1.48) esta expresión es claramente equivalente a:
1.49
La figura 1.4.4 describe el comportamiento de la expresión de
La función también puede evaluarse mediante aproximaciones. Primero se escribe la función como:
) 1.50
Donde
1.51
Se conoce como la función Q. Al igual que , no tiene una solución cerrada
conocida, pero lo aremos por aproximación dada por la fórmula:
| √ | √ 1.52
Donde a y b son constantes siendo
1.4.3 Binomial
Se puede imaginar un experimento en el que el resultado es la ocurrencia o la no ocurrencia de un evento. Sin pérdida de generalidad, llámese éxito a la ocurrencia del evento y fracaso a su no ocurrencia. Además, sea p la probabilidad de éxito cada
vez que el experimento se lleva a cabo y la probabilidad de fracaso. Supóngase que el experimento se realiza n veces, y cada uno de estos es independiente de todos los demás, y sea X la variable aleatoria que representa el número de éxitos en
El interés está en determinar la probabilidad de obtener exactamente éxitos durante los n ensayos. Las dos suposiciones claves para la distribución binomial son:
1.- La probabilidad de éxito p permanece constante para cada ensayo.
2.- Los n ensayos son independientes entre sí.
Para obtener la función de probabilidad de la distribución binomial, primero se determina la probabilidad de tener, en n ensayos, x éxitos consecutivos seguidos de n –x fracasos consecutivos. Ahora bien se tiene:
La probabilidad de obtener exactamente x éxitos y n-x fracasos en cualquier otro
orden es la misma puesto que los factores p y (1-p) se reordenan de acuerdo con el
orden particular. Por lo tanto, la probabilidad de tener x éxitos y n-x fracasos en
cualquier orden, es el producto de por el número de ordenes distintos.
Este último es el número de combinaciones de n objetos tomado x a la vez. De
acuerdo con lo anterior se tiene la siguiente definición:
Definición 1: Sea X una variable aleatoria que representa el número de éxitos en n
ensayos y p la probabilidad de éxitos con cualquiera de estos. Se dice entonces que X tiene una distribución binomial con función de probabilidad.
{
Los parámetros de la distribución binomial son n y p. Estos definen una familia de distribuciones binomiales, en donde cada miembro tiene la función de probabilidad determinada por (1.50). Para ilustrarlas el efecto de estos parámetros la figura 1.4.5 proporciona algunas gráficas de la distribución binomial.
Figura 1.4.5 Gráfica de la función binomial de probabilidad
Ejemplo: utilizando la fórmula 1.53 sea n = 5 y p = 0.4 entonces:
Así:
El nombre distribución binomial proviene del hecho de que los valores para
solo los términos sucesivos de la expansión binomial de esto es:
∑
∑ 1.54
para , este hecho Pero dado que
también verifica que es una función de probabilidad.
La media de una variable aleatoria binomial es:
1.55
La varianza de una variable aleatoria binomial es:
1.4.4 Poisson
La variable aleatoria representa el número de eventos independientes que ocurre a una variable aleatoria. Muchos eventos aleatorios ocurren de manera independiente con una velocidad constante en el tiempo o en el espacio.
La distribución de Poisson es el principal modelo de probabilidad empleado para analizar problemas de líneas de espera, además, ofrece una aproximación excelente a la función de probabilidad Binomial cuando p es pequeño y n grande.
Definición 1: Sea X una variable aleatoria que representa el número de eventos
aleatorios independientes que ocurren a una rapidez constante sobre el tiempo o el espacio. Se dice que la variable aleatoria X tiene una distribución de Poisson con función masa de probabilidad.
{
1.57
El parámetro de la distribución de Poisson es λ, el número promedio de ocurrencias
del evento aleatorio por unidad de tiempo. Para valores mayores que cero, λ define
una familia de distribuciones con una función de probabilidad determinada por (1.57), en la figura 1.4.6 se proporcionan algunas gráficas de la función de probabilidad de
Poisson, para distintos valores de λ:
Puede verificarse que (1.57) es una función de probabilidad, puesto que para ∑ ∑ ∑ 1.58 Ejemplo: sea ; entonces:
De esta forma se tiene:
Con este ejemplo se determina que la probabilidad individual son más y más pequeñas conforme la variable aleatoria toma valores cada vez más grandes. Ésta es una característica de la distribución de Poisson. La probabilidad de que una variable aleatoria de Poisson X sea menor o igual a un valor de x se determina por la función de distribución acumulativa.
∑ 1.59
Ejemplo: sea La probabilidad de que X sea menor que tres es:
Los momentos de la variable aleatoria de Poisson se determinan mediante los mismos procedimientos utilizados para la variable aleatoria binomial. Si X una variable aleatoria de Poisson, su valor esperado es:
Para la varianza X:
∑
∑
∑
1.61
Entonces, de
Tenemos:
Y la varianza de X es:
C
APÍTULO
2
|
“Procesos
2.1 Introducción
En el mundo práctico de la ingeniería y la ciencia, es necesario trabajar con formas de onda variables con el tiempo. Con frecuencia, nos encontraremos en los sistemas prácticos con forma de onda temporales aleatorias. Casi siempre una señal de información de un sistema de comunicaciones será aleatoria.
Por ejemplo, el flujo de bits en un sistema de comunicaciones binario es un mensaje aleatorio porque cada que se genera un bit se genera de manera aleatoria (Fig.2.1.1).
Fig.2.1.1 Secuencia de bits aleatorios
Por otro lado, una señal deseada a menudo va acompañada de una forma de onda aleatoria no deseada como el ruido. El ruido afecta o se mezcla con el mensaje y fundamentalmente limita el rendimiento del sistema.
La idea de un modelo matemático utilizado para describir un fenómeno físico se establece perfectamente en las ciencias físicas y en la ingeniería. En este contexto es posible distinguir dos clases de modelos matemáticos: determinístico y estocástico. Se afirma que un modelo es determinístico si no hay incertidumbre acerca de su comportamiento dependiente del tiempo en cualquier instante. Sin embargo, en muchos problemas reales el empleo de un modelo determinístico resulta inapropiado porque el fenómeno físico de interés incluye demasiados factores desconocidos.
2.2 Proceso aleatorio
Para conocer el concepto de proceso aleatorio es necesario que se amplíe el concepto de variable aleatoria, debido a que en un proceso aleatorio se debe tener en cuenta el tiempo.
Una variable aleatoria X es una función de los resultados posibles s de un
determinado experimento, para el caso de un proceso aleatorio dependerá de s pero
también del tiempo.
2.1
A la familia de todas estas funciones designadas por se le denomina proceso aleatorio.
Para determinar las probabilidades de los diversos resultados posibles de un experimento, este se repite muchas veces .Sin embargo no es lo mismo realizar un determinado experimento con diferentes equipos, que realizar un experimento muchas veces con uno solo. En principio podría esperarse que ambos métodos arrojaran los mismos resultados si las condiciones y equipos fueran idénticos y se mantuvieran así durante el experimento, pero como se mencionó anteriormente no es así. La aplicación de conceptos probabilísticos a los sistemas de comunicación están realmente más cerca del segundo. De manera conceptual, el segundo método podría considerarse como un generador de números aleatorios que produce un número entre 1 y 6, accionado por un reloj.
Ahora supóngase que se tienen muchos de estos generadores accionados por un reloj común. Dicha colección de fuentes de señal se llama conjunto. Las señales de los generadores de números aleatorios individuales (que están en función del tiempo)
se llaman funciones muestra, cuando hay “i” posibles resultados discretos. El
conjunto de las posibilidades funciones se llama proceso aleatorio.
Para tener más clara la idea de que proceso aleatorio se pondrá el siguiente ejemplo, podrían lanzarse de manera simultánea 100 monedas en un tiempo t y determinar las
Fig.2.1.2 El lanzamiento de 100 monedas al mismo tiempo tendrán diferentes resultados estadísticos y probabilísticos que si se lanza una sola moneda 100 veces.
Por otra parte, se podría observar una sola función de muestra por periodo de tiempo y determinar sus estadísticas (esto correspondería a lanzar una moneda 100 veces en sucesión Fig.2.1.2). De estas observaciones pueden calcularse promedios llamados de tiempo. Algunas de estas ideas se pueden ilustrar graficando la salida de cierto número de generadores de señales aleatorias idénticos.
Los procesos aleatorios se clasifican como continuos o discretos. Un proceso aleatorio continuo se compone de un proceso aleatorio con variables aleatorias asociadas de distribución continua. El proceso aleatorio Gaussiano es un ejemplo de un proceso aleatorio continuo. Un proceso aleatorio discreto se compone de variables aleatorias con distribución discreta.
2.2.1 Definición matemática de un proceso aleatorio
Los procesos aleatorios tienen funciones de dos variables:
1) Están en función del tiempo
2) Están en función de un espacio muestra
Además son aleatorios porque de llevar a cabo un experimento, no es posible definir con exactitud las formas de onda que se observarán en el futuro.
Suponga que asignamos un tiempo a cada punto muestra “s” de una función S de
acuerdo con la siguiente regla: Fig. 2.2.1
Figura 2.2.1 La función depende de 2 variables
Para representar un proceso estocástico podemos usar la notación usando variables aleatorias, tiene las siguientes interpretaciones:
1.- es una función de tiempo singular (o una muestra del proceso dado) en este
caso, “t” es una variable y “ es fijo
2.- Si “t” es fijo y es una variable, entonces es una v.a. igual al estado del
proceso dado en el tiempo “t”
3.- Si “t” y “s” son fijos, es un número.
Donde T es el intervalo de observación total. En un punto fijo s de la muestra, la
gráfica de la función en función del tiempo t recibe el nombre de realización o función de la muestra del proceso aleatorio.
2.3- Procesos estacionarios
Un proceso aleatorio se convierte en una variable aleatoria cuando se fija un tiempo en un determinado valor, esta variable aleatoria tendrá sus correspondientes propiedades estadísticas (valor medio, varianza, etc.). Si dos variables aleatorias se obtienen a partir del proceso para dos instantes de tiempo, tendrán propiedades estadísticas relacionadas con su función de densidad conjunta.
Un proceso aleatorio se dice que es estacionario si todas sus propiedades estadísticas no cambian con el tiempo.
La caracterización estadística del proceso es independiente del tiempo en el que se inicia la observación del proceso. Es decir, si un proceso de este tipo se divide en varios intervalos de tiempo, las distintas secciones del proceso exhiben en esencia las mismas propiedades estadísticas, un proceso de estas características se dice que es estacionario.
Existen varios tipos de estacionalidad, estos pueden ser clasificados de acuerdo al orden que tienen, pueden ser de primer, segundo y de orden N.
Un proceso aleatorio es estacionario de primer orden si su función de densidad de primer orden no cambia al desplazar el origen de tiempos. Para ejemplificar mejor:
2.3
Tiene que cumplirse para cualquier y cualquier número real si X (t) es un proceso estacionario de primer orden.
Las consecuencias de la expresión anterior son que es independiente de y que el valor medio del proceso es una constante:
Un proceso es estacionario de orden dos si su función de densidad de segundo orden satisface la siguiente relación:
Para todo
En este caso la correlación = de un proceso aleatorio es una función de y . Sin embargo la función de autocorrelación de un proceso estacionario de segundo orden es solo una función de las diferencias entre los tiempos y no de un tiempo absoluto, es decir:
= 2.3.1
Entonces
2.3.2
Dónde:
=
Un proceso arbitrario de segundo orden también es un proceso arbitrario de primer orden.
Se puede tener dos procesos aleatorios estacionarios conjuntamente si cada uno de
ellos satisface la ecuación
Al involucrar los dos procesos quedaría:
2.3.3
La estacionalidad de orden N la podemos obtener generalizando el razonamiento
anterior a N variables aleatorias , donde i=1,2...N.
Un proceso es estacionario de orden N si su función de densidad de orden N no
varía al desplazar el origen de tiempos, es decir:
La estacionalidad de orden N implica la estacionalidad de todos los ordenes k ≤σ.
2.4 Estadísticas de procesos aleatorios
2.4.1 Media
Tenemos un proceso aleatorio estrictamente estacionario . Se define la medida de proceso como el valor esperado de la variable aleatoria obtenida al observar el proceso en algún tiempo t, como se indica mediante
∫ 2.4
Donde es la función de densidad de probabilidad de primer orden del proceso. A partir de la ecuación
Deducimos que para un proceso aleatorio estrictamente estacionario, es independiente del tiempo t.
En consecuencia, la medida en la que un proceso es estrictamente estacionario es una constante, como lo indica
2.4.1
Para calcular el promedio temporal de una magnitud se define:
∫ 2.4.1 a
Donde A se utiliza para indicar el promedio temporal de forma análoga a la notación
para el valor medio estadístico.
El promedio temporal se calcula para todos los instantes de tiempo, ya que, en los procesos aleatorios se presupone que las funciones muestra de los procesos existen en todo instante de tiempo.
Los promedios específicos de interés son el valor medio Ẍ =A [ ] de una función
muestra.
2.4.2 Autocorrelación
Se define la función de autocorrelación de proceso como el valor esperado del producto de dos variables aleatorias, X(t1) y X(t2), obtenido al observar el proceso de
en los tiempos t1 y t2, respectivamente. De manera específica, escribimos
Donde es la función de densidad de probabilidad de segundo orden de proceso. Según la ecuación
( ) ( ) 2.4.3
Para toda t y
Deducimos que para un proceso aleatorio estrictamente estacionario , solo depende de la diferencia entre los tiempos de observación t1
y t2, lo cual significa que la función de autocorrelación de un proceso estrictamente
estacionario solo depende de la diferencia de tiempo t2 - t1 , como se indica mediante
2.4.4
De manera similar, la función de autocovarianza de un proceso estrictamente estacionario se escribe como
2.4.5
Las propiedades de la autocorrelación se enuncian enseguida:
Redefinimos la función de autocorrelación de un proceso estacionario como
2.4.6
Esta función de autocorrelación tiene varias propiedades importantes:
1. El valor cuadrático medio del proceso se puede obtener a partir de Rx( )
poniendo simplemente =0 en la ecuación (2.4.4) como se indica por medio de
2. La función autocorrelación Rx( ) es una función par de , esto es:
2.4.8
Esta propiedad se desprende directamente de la ecuación de definición (2.4.4). En consecuencia, es posible que definamos la función de autocorrelación Rx ( ) como
3. La función de autocorrelación Rx( ) tiene su magnitud máxima en =0, es
decir:
| | 2.4.9
Para probar esta propiedad, considere esta cantidad no negativa
[( ) ] 2.4.10
Al desarrollar los términos y tomar sus valores esperados individuales, encontramos fácilmente que
2.4.11
Que, a la luz de las ecuaciones (2.4.8) y (2.4.9) se reduce a
De manera equivalente, es posible escribir
2.4.12
A partir de los cual se deduce directamente la ecuación (2.4.9)
El significado físico de la función de autocorrelación es que esta proporciona una forma o medida para describir la interdependencia de dos variables aleatorias obtenidas al observar un proceso aleatorio en tiempo separado segundos. Por tanto, resulta claro que cuanto más rápido cambie con el tiempo el proceso aleatorio
, tanto más rápido la función de correlación disminuye a partir de su máximo cuando crece, como se ilustra en la figura 2.4.2.
Figura 2.4.2 Ilustración de las funciones de autocorrelación de procesos aleatorios
2.4.3 Correlación
Se considera el caso más general de dos procesos aleatorios , Y con funciones de autocorrelación y respectivamente. Las dos funciones de correlación cruzada de Y se define por medio de:
2.4.13
Donde t y u denotan dos valores de tiempo en los cuales se observa los procesos.
En este caso, las propiedades de correlación de los dos procesos aleatorios y Y quizá se exhiban de manera conveniente en forma de matriz del siguiente modo:
[
] 2.4.15
La cual recibe el nombre de matriz de correlación del procesos aleatorio Y . Si cada uno de los procesos aleatorios Y es estacionario y, además, son conjuntamente estacionarios, entonces es posible escribir la matriz de correlación como:
[
] 2.4.16
Donde
2.5 Procesos Ergódicos
Se dice que un proceso es ergódico si tomando una sola función muestra de todas las funciones muestras obtenidas del sistema, podemos obtener sus parámetros probabilísticos (media, varianza, etc.), un proceso para ser ergódico forzosamente requiere ser estacionario, sin embargo un proceso estacionario no forzosamente es ergódico.
Se dice que un proceso es ergódico respecto a la correlación si, y solo si, para todo :
Las esperanzas o promedio totales de un proceso aleatorio son promedios
“entre los extremos del proceso”.
Por ejemplo, la media de un proceso aleatorio en algún tiempo fijo tk es la
esperanza de la variable aleatoria X (tk) que describe todos los valores posibles de
las funciones muestra del proceso observado en el tiempo t=tk.
De modo natural, es posible definir también promedios de muestra a largo plazo o promedios de tiempo que son promedios a lo largo del proceso. Por lo tanto, estamos interesados en relacionar promedios totales con promedios de tiempo para que estos últimos representen un medio práctico que esté disponible para la estimación de los promedios totales de un proceso aleatorio. Pero cuando es posible sustituir los promedios de tiempo por los promedios totales, para esto se considera la función muestra x(t) de un proceso estacionario , con el intervalo de observación definido
como El valor de C. D. de se define mediante el promedio de tiempo
2.5.1
El promedio de tiempo es una variable aleatoria, ya que su valor depende del intervalo de observación y de la función muestra particular del proceso aleatorio X(t).
Puesto que se supone que el proceso X(t) es estacionario, la media del promedio de
tiempo está dada por:
∫
∫
2.5.2
Donde es la media del proceso X(t). El promedio de tiempo representa por
Se afirma que el proceso X(t) es ergódico en la media si se satisfacen dos
condiciones:
1.- El promedio de tiempo se acerca al promedio total en el límite cuando el intervalo de observación T tiende a infinito; esto es:
2.5.3
2.- La varianza de , tratada como una variable aleatoria, tiende a 0 en el límite cuando el intervalo de observación T se acerca a infinito; estos es:
2.5.4
El otro promedio en el tiempo de interés particular es la función de autocorrelación
definido en términos de la función muestra x (t) observada sobre el intervalo
. De la ecuación (2.5.2) es posible que definamos formalmente la función
de autocorrelación promediada en el tiempo de una función muestra x (t) del modo
siguiente:
∫ 2.5.5
Este segundo promedio en el tiempo también debe verse como una variable aleatoria con una media y una varianza propia; De manera similar a la ergodicidad de la media, afirmamos que el proceso es ergódico en la función de autocorrelación si se satisfacen las dos condiciones límite siguiente:
2.5.6
2.5.7
2.6 Trasmisión de un proceso aleatorio a través de un filtro lineal invariante con el tiempo
Supongamos que un proceso aleatorio se aplica como entrada a un filtro lineal invariante con el tiempo de respuesta al impulso , produciendo un nuevo proceso aleatorio en la salida del filtro, como en la figura 2.6.1.
En general, resulta difícil describir la distribución de probabilidad del proceso aleatorio de salida , aun cuando la distribución de probabilidad del proceso aleatorio de entrada este especificada por completo en .
Figura 2.6.1 Transmisión de un proceso aleatorio a través de un filtro lineal invariante con el tiempo
La trasmisión de un proceso a través de un filtro lineal invariante con el tiempo está gobernada por la integral de convolución; expresaremos el proceso aleatorio de salida en términos del proceso aleatorio de entrada como:
∫ 2.6.1
Donde 1 es la variable de integración. Entonces tenemos que la media de es:
2.6.2
Siempre que la esperanza sea finita para todo y el sistema estable, existe la posibilidad de que intercambiemos el orden de la esperanza y la integración de la ecuación (2.6.3) y escribir de esta manera:
∫
∫ 2.6.4
Cuando el proceso aleatorio de entrada es estacionario, la media es una constante , por lo que podemos simplificar la ecuación (2.6.4) de este modo.
∫
2.6.5
Donde es la respuesta en frecuencia en 0 (cd) del sistema.
La ecuación (2.6.5) establece que la media de un proceso aleatorio producida a
la salida de un sistema lineal invariante con el tiempo en respuesta a que actúa como el proceso de entrada es igual a la media de multiplicada por la respuesta de cd del sistema, lo cual se satisface de manera intuitiva.
Consideremos la función de autocorrelación del proceso aleatorio de salida . Por definición, tenemos:
Donde y denotan dos valores del tiempo en el cual se observa el proceso de salida. Por tanto resulta viable utilizar la integral de convolución para escribir:
[∫ ∫ ] 2.6.7
En este caso también, siempre que el valor cuadrático medio sea finito para todo t y el sistema sea estable, podemos intercambiar el orden de la esperanza y la integración con respecto a y en la ecuación (2.6.6), obteniendo:
∫
∫
∫ ∫ 2.6.8
Cuando la entrada es un proceso estacionario, la función de autocorrelación de
es únicamente una función de la diferencia entre los tiempos de observación
. Al poner en la ecuación (2.6.8), podemos escribir:
∫ ∫ 2.6.9
Al combinar este resultado con el que involucra a la media , observamos que si la entrada para un filtro y estable invariante con el tiempo es un proceso estacionario, entonces la salida del filtro también es un proceso estacionario.
Puesto que , se concluye que el valor cuadrático medio del proceso aleatorio de salida se obtiene al sustituir en la ecuación (2.6.9).
De tal modo obtenemos el resultado
2.7 Densidad Espectral de Potencia
Para un proceso aleatorio x(t), definimos como la porción de una función
muestra x(t) que existe entre –T y T, es decir:
{ 2.7.1
La energía contenida en x(t) en el intervalo ( -T, T ) es:
∫ ∫ 2.7.2
Puesto que tiene transformada de Fourier, su energía también tiene que estar relacionada con por lo tanto:
∫ ∫ | | 2.7.3
Si dividimos la última ecuación 2.7.3 entre 2T obtendremos la potencia media P (T)
en x(t) en el intervalo (-T,T ):
∫ ∫ | | 2.7.4
Para lograr encontrar la potencia media deseada requerimos calcular la expresión anterior cuando T